四级皮带运输机控制电路设计
plc四级传送带控制系统设计

摘要传送带系统最大特点是它的综合性和系统性,综合性主要涉及机械技术、微电子技术、电工电子技术、传感测试技术、接口技术、信息变换技术、网络通信技术等多种技术有机地结合,并综合应用到生产设备中;而系统性指的是生产线的传感检测、传输与处理、控制、执行与驱动等机构在微处理单元的控制下协调有序地工作,有机地融合在一起。
本系统完成一个基于plc的四级传送带的设计。
系统的控制方式采用每一工作单元由一台PLC承担其控制任务,各PLC之间通过实现互连的分布式控制方式。
所以,本设计综合应用了多种技术知识,如传感器应用技术、PLC控制和组网、步进电机位置控制和变频器技术等。
关键字:组态自动化 PLC 电机IAbstractThe biggest characteristic of the automatic production line is a comprehensive system and its comprehensive, mainly involved in mechanical technology, microelectronics technology, electrical and electronic technology, sensing technology, interface technology and information transformation technology, network communication technology and other technology organically, and applied to production equipment and systems; means the production line of the sensor detection, transmission and processing, control, execution and driving mechanism in the control of the micro processing unit under the coordination and orderly work together organically. The system completes the design of an automatic heating line for the production of automobile carpet. The control mode of the system is that each working unit is controlled by a PLC, and each PLC is connected by RS485 serial communication. Therefore, the design of the application of a variety of technical knowledge, such as sensor application technology, PLC control and networking, stepper motor position control and inverter technology, etc..Key words: network configuration automation PLC motor传送带控制系统设计目录摘要 (I)Abstract ................................................................................................................................................................ I I 目录 (V)第一章控制系统综述........................................................................................................... 错误!未定义书签。
西门子S7-300PLC编程实战之多级皮带运输控制
西门子S7-300PLC编程实战之多级皮带运输控制
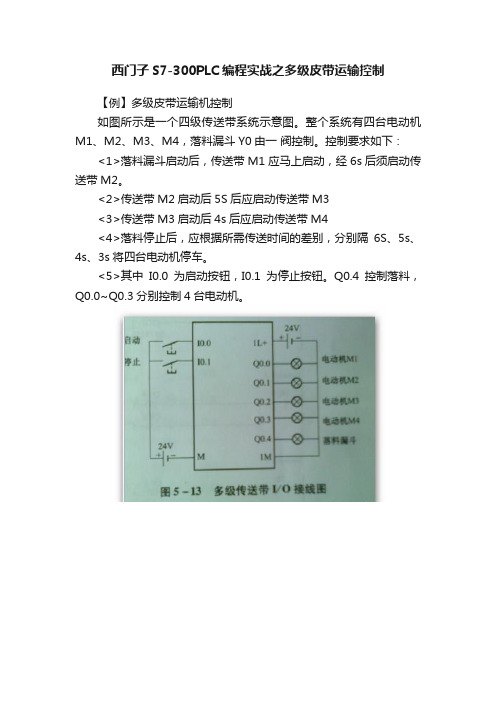
【例】多级皮带运输机控制
如图所示是一个四级传送带系统示意图。
整个系统有四台电动机M1、M2、M3、M4,落料漏斗Y0由一阀控制。
控制要求如下:
<1>落料漏斗启动后,传送带M1应马上启动,经6s后须启动传送带M2。
<2>传送带M2启动后5S后应启动传送带M3
<3>传送带M3启动后4s后应启动传送带M4
<4>落料停止后,应根据所需传送时间的差别,分别隔6S、5s、4s、3s将四台电动机停车。
<5>其中I0.0为启动按钮,I0.1为停止按钮。
Q0.4控制落料,Q0.0~Q0.3分别控制4台电动机。
编程思想:用启动和停止过程共同来控制电机的启停。
煤矿四级皮带运输系统的 PLC 控制及其组态
本科毕业生专题课程设计煤矿皮带运输系统的 PLC 控制及其组态专业班级:采矿工程 1010 班学号: 2010002576学生姓名:刘全利指导教师:郝俊青2014 年 4 月12 日煤矿皮带运输系统的 PLC 控制及其组态目录言................................................................................. .. (1)第 1 章皮带运输机运动控制系统简介 (1)1.1 皮带运输系统............................................................................. (1)1.2 皮带机控制系统要求............................................................................. (1)第 2 章软件介绍与监控系统总体设计 (3)2.1 西门子 S7-200 软件介绍..............................................................................32.2 组态王 6.5 软件介绍............................................................................. (6)2.3 监控系统的组成结构............................................................................. (7)第 3 章 PLC 的硬件电路设计................................................................................. . (10)3.1 皮带运输机工作原理............................................................................. (10) (11)3.3 控制系统主电路的设计..............................................................................123.4 PLC 开关量及外部接线的设计 (13)第 4 章 PLC 控制的软件程序设计 (15)4.1 系统功能的分析与设计..............................................................................154.2 I/O 信号的分析与 PLC 梯形图设计 (16)4.3 程序调试............................................................................. (17)第 5 章组态监控画面的设计................................................................................. (18)5.1 创建组态画面............................................................................. (18)5.2 组态调试............................................................................. (20)参考文献................................................................................. . (23)1前言煤矿皮带运输机主要用于煤炭采掘、生产、转运、加工过程中的重要运输机械。
四级皮带运输机控制电路设计
四级皮带运输机控制电路设计摘要随着社会的不断进步和发展,人们对皮带运输机要求也越来越高,这就需要我们不断的改善和进步,以满足社会的需求。
数控技术是现代机械行业的顶峰,正向着高速、高精度、安全性、稳定性的方向发展,不仅能够保证运输的安全性,同时还能保证使用的稳定性。
根据人们对皮带运输机的使用要求,并结合数控技术的先进性,采用数控电路系统对皮带运输机控制电路的设计。
首先,确定出四级皮带运输机的电力拖动方案,以及传动方案。
再以列出的电力拖动和传动方案的基础上,合理的选择出驱动电动机。
其次根据电力拖动方案的要求,即四级运输机的控制要求,用经验设计法设计出电气控制线路,其中包括主线路和控制线路。
然后根据设计出的电气控制电路,选择出合理的低压电器元件。
最后以表格的形式列出所选低压电器元件的明细表。
关键词:拖动方案;主线路;控制线路;元件明细;AbstractProgresses unceasingly along with the society and develops, the people are also getting higher and higher to the belt conveyer request, this needs our unceasing improvement and the progress, satisfies social the demand. The numerical control technology is the modern mechanical profession crest, is turning toward, the high accuracy, the security, the stable direction to develop high speed, not can only guarantee that transportation's security, meanwhile can guarantee the use the stability. According to the people to belt conveyer's operation requirements, and unifies the numerical control technology the sophistication, uses the numerical control circuitry to the belt conveyer control circuit's design.First, determines four level of belt conveyer's electric drive plan, as well as transmission plan. Lists again electric drive and in transmission plan foundation, reasonable choice drive motor. Next according to the electric drive plan's request, namely four level of transport aircraft's control requests, designs the electric control line with the empirical design law, including the main line and the control wiring. Then the basis designs the electric control electric circuit, chooses the reasonable low-voltage electrical apparatus part. Finally lists by the form form chooses the low-voltage electrical apparatus part's detailed list. key word:Keywords: Main line; Control wiring; Part detailed list;目录绪论 (1)第1章拖动方案的决定及电动机的选择 (2)1.1 拖动方案的决定 (2)1.2 电动机的选择 (3)1.2.1 选择电动机类型 (4)1.2.2 电动机容量选择 (5)1.2.3 确定电动机额定功率 (6)1.2.4 确定电动机转速 (5)1.2.5 电动机的维护 (6)1.2.6 电动机常见故障 (7)第2章电气控制线路的设计 (8)2 .1 电气原理图设计的基本步骤 (8)2.2电气原理图的设计方法 (8)2.2.1分析设计法 (8)2.2.2逻辑设计法 (10)2.3 原理图设计中应注意的问题 (9)2.3.1选择控制电源 (11)2.3.2选择电器元件 (11)2.3.3减少通电电器的数量 (10)2.3.4合理使用电器触点 (10)2.3.5正确连线 (10)2.4 主线路的设计 (11)2.5 控制线路的设计 (12)第3章电气元件的选择 (18)3.1 刀开关和熔体的选择 (18)3.1.1刀开关的选型 (18)3.1.2熔断器选型 (19)3.1.3各类设备熔断器选择 (20)3.1.4快速熔断器的选择 (18)3.2 热继电器的选择 (22)3.3 交流接触器的选择 (20)3.4 时间继电器的选择 (21)3.5 中间继电器的选择 (22)3.6 按钮开关的选择 (23)元件明细表 (25)设计总结 (26)参考文献 (27)致 (28)绪论在工矿企业中,皮带运输机是常用的短途运输工具之一。
PLC课设四条皮带运输机的传送系统

目录引言11 控制系统设计要求11.1 PLC课程设计主要步骤11.2 系统控制要求21.2.1控制要求21.2.2设计板31.2.3四节传送带的工作方式32 设计方案42.1 总体设计方案说明43 系统硬件设计43.1 PLC选型及硬件配置43.1.1选型原则43.1.2选型方法43.1.3硬件配置43.2主电路设计43.3 控制电路设计53.4 PLC的I/O接线图53.5 PLC接线图64 PLC控制软件设计及调试64.1 系统程序设计64.2程序的模拟与调试11参考文献13可编程序控制器,英文称Programmable Controller,简称PC。
但由于PC和个人计算机(Personal puter)混淆,故人们仍习惯地用PLC作为可编程序控制器的缩写。
它是一个以微处理器为核心的数字运算操作的电子系统装置,专为在工业现场应用而设计,它采用可编程序的存储器,用以在其部存储区域执行逻辑运算、顺序控制、定时/计数和算术运算等操作指令,并通过数字式或模拟式的输入、输出接口,控制各种类型的机械或生产过程。
PLC是微机技术与传统的继电接触控制技术相结合的产物,它克服了继电器控制系统中的机械触点的接线复杂、可靠性低、功耗高、通用性和灵活性差的缺点,充分利用了微处理器的优点,又照顾到现场操作维修人员的技能与习惯,特别是PLC程序的编制,不需要专门的计算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使用户程编制形象、直观、方便易学;调试与查错也都很方便。
用户在购到所需的PLC后,只需按说明书的提示,做少量的接线和简易的用户程序的编制工作,就可灵活方便地将PLC应用于生产实践。
本课题是用PLC模拟四节传送带的工作。
用PLC控制传送带具有程序设计简单、易于操作和理解、能够实现多种功能等优点。
此系统能够实现四节传送带的倒序启动和顺序停止以及故障、重物处理等功能1 控制系统设计要求1.1 PLC课程设计主要步骤1、分析被控对象的工艺条件和控制要求。
皮带运输机运行控制电路设计
6
7
FR1-FR
JUX-15F
NTOORT16 BP8Y-906 SFPZ9120000/110 31-968.25 (绿色) 多丝发光二极管
3
4
8
9 10
R
T HL1-HL3
变阻器
变压器 指示灯
9
1 3
皮带运输机的检测与维修
皮带运输机运行时皮带跑偏是最常见的故障。为解决这类故障重点要注意安装的 尺寸精度与日常的维护保养。跑偏的原因有多种,需根据不同的原因区别处理。 1.1 调整承载托辊组 皮带机的皮带在整个皮带运输机的中部跑偏时可调整托辊组的位置来调整跑 偏;在制造时托辊组的两侧安装孔都加工成长孔,以便进行调整。具体方法是皮 带偏向哪一侧,托辊组的哪一侧朝皮带前进方向前移,或另外一侧后移。皮带向 上方向跑偏则托辊组的下位处应当向左移动,托辊组的上位处向右移动。 1.2安装调心托辊组 调心托辊组有多种类型如中间转轴式、四连杆式、立辊式等,其原理是采用 阻挡或托辊在水平面内 方向转动阻挡或产生横向推力使皮带自动向心达到调整皮 带跑偏的目的。一般在皮带运输机总长度较短时或皮带运输机双向运行时采用此 方法比较合理,原因是较短皮带运输机更容易跑偏并且不容易调整。而长皮带运 输机最好不采用此方法,因为调心托辊组的使用会对皮带的使用寿命产生一定的 影响。
Next
▲如何实现 ▲合上QS,电源指示灯HL1亮,电源通电;按下 SB2,线圈KM1得电,电机M1运行,同时通电延 时继电器工作,线圈KM2、KM3依次得电,电机 M2、M3依次运行;其中过流继电器起到过流保护 作用;变阻器起到调速作用。 ▲关键部分的描述 ▲三相异步电动机:7KW、380V、15A、1420r/min; ▲熔断器:14A; ▲接触器:额定:380V、16A,线圈电压380V。
基于PLC的四级传送带控制系统的设计
摘要本设计采用三菱FX2-32MR型PLC控制四级传送带,电动机采用Y160M-4型,并且通过变频器来调节电动机的转速。
本设计相比于传统的继电器控制克服了接线复杂,故障诊断与排除困难等固有缺陷。
并且由于继电器控制是利用布线组成各种逻辑来实现控制,需要大量机械触点,因此可靠性不高;当改变生产流程时要改变大量的硬件接线,甚至重新设计系统,要耗费大量的人力物力,花费很多时间。
因而造成了这些企业的生产率低下,效益差。
本设计相比于继电器控制具有更加安全、迅速、可靠的优点。
关键词:PLC;传送带控制;变频调速目录摘要 (i)Abstract .................................................... 错误!未定义书签。
第一章绪论.. (1)第二章方案论证 (2)传送带的控制方式 (2)一、继电接触器控制方式 (2)二、单片机控制方式 (2)三、PLC控制方式 (2)第三章可编程控制器的概述 (7)第一节 PLC的基本概念 (7)第二节 PLC的基本结构 (7)第三节 PLC的工作原理 (8)第五章主要器件的选型 (9)第一节PLC型号的选择 (9)一、PLC的选型原则 (9)二、PLC型号的确定 (12)第二节电机型号的选择 (12)第三节按钮及保护装置的选型 (12)一、刀开关 (12)二、按钮 (13)三、继电器 (13)四、热继电器 (13)五、熔断器 (13)六、接触器 (14)七、断路器 (15)第六章硬件设计 (16)第一节电机过载断相保护电路 (16)一、电动机在起动和运行过程中可能发生的故障和保护特点 (16)二、电动机保护器对故障信号的采样方法 (17)三、时基电路NE555的电路原理简析 (18)四、HBHQ-0-1电动机断相过载保护器 (20)五、JD6型全电子式多功能电动机保护器 (21)六、JD6等相似电动机保护器的故障检修要点 (23)七、电动机保护器故障维修实例 (24)八、电动机保护器的控制接线 (24)第二节变频器 (25)一、变频器的原理 (25)二、变频器的组成部分 (27)三、变频调速系统的抗干扰对策 (29)四、常见变频器故障判断及处理 (30)五、变频器与外围设备的接线 (32)六、变频器的配线 (34)七、本设计变频器的选择 (35)第三节电机的自耦变压器降压启动 (36)第四节硬件总接线 (38)第七章软件设计 (40)第一节软件设计流程图 (40)第二节系统软件控制要求 (41)一、初始状态 (41)二、启动操作 (41)三、停止操作 (41)四、故障停止 (42)第三节 I/O地址分配 (42)第八章软件仿真 (43)第一节启动部分的仿真 (43)第二节停止部分的仿真................................... 错误!未定义书签。
基于 PLC 的四级传送带控制系统设计
M3、M4,间隔 3 秒。
3、当某条皮带机故障时,该皮带机及前面的皮带机立即停止,而后面的皮带机待料运
在工业生产过程中,大量的开关量顺序控制,它按照逻辑条件进行顺序动作,并按照 逻辑关系进行连锁保护动作的控制,及大量离散量的数据采集。传统上,这些功能是通过 气动或电气控制系统来实现的。
21 世纪,PLC 会有更大的发展。从技术上看,计算机技术的新成果会更多地应用于可 编程控制器的设计和制造上,会有运算速度更快、存储容量更大、智能更强的品种出现; 从产品规模上看,会进一步向超小型及超大型方向发展;从产品的配套性上看,产品的品 种会更丰富、规格更齐全,完美的人机界面、完备的通信设备会更好地适应各种工业控制 场合的需求;从市场上看,各国各自生产多品种产品的情况会随着国际竞争的加剧而打破, 会出现少数几个品牌垄断国际市场的局面,会出现国际通用的编程语言;从网络的发展情 况来看,可编程控制器和其它工业控制计算机组网构成大型的控制系统是可编程控制器技 术的发展方向。目前的计算机集散控制系统 DCS(Distributed Control System)中已有大量 的可编程控制器应用。伴随着计算机网络的发展,可编程控制器作为自动化控制网络和国 际通用网络的重要组成部分,将在工业及工业以外的众多领域发挥越来越大的作用。
结合 PLC 和组态王的特点,实现组态王实时监控 PLC 运行,本次课设根据课设要求 得出如下设计方案。
1. 总体方案设计
1.1 PLC的设计方案 本设计使用 PLC 作为系统的控制器。首先根据控制对象的实际情况和控制要求选择适
合型号的 PLC 作为控制器。确定好要选用型号的 PLC 后,就要设计相应的硬件电路。硬 件电路的设计包括主电路的设计和控制电路的设计。
沈阳航空航天大学
皮带运输机电气控制系统设计
皮带运输机电气控制系统设计任务书一、设计目的通过对皮带运输机电气控制系统设计,使学生初步掌握电气控制系统的设计方法,以及电气常用元器件的选型;使学生初步具有控制系统主电路、控制电路的分析和设计方法;同时使学生掌握电气线路原理图的绘制方法,为今后走上工作岗位应用电气控制基本理论知识奠定良好的基础。
二、原始资料某建筑工地采用皮带运输机运送沙料,其工作示意图由下图所示:1)起动时,顺序为3# 、2# 、1#电动机,并要有一定的时间间隔,以免沙料在皮带上堆积,造成后面的皮带重载起动(2)电动机的停车顺序为1 # 、2# 、 3 #,且应有一定的时间间隔,以保证停车后皮带上不残存沙料(3)无论哪台电动机过载,所有电动机必须按顺序停车,以免造成沙料堆积(4)线路应有失压、过载、短路等保护环节三、设计主要内容1、设计主电路2、设计基本控制电路3、设计保护环节,完善控制线路4、对线路工作原理进行分析,最后审查确定线路的可靠性5、完成器件选型摘要:皮带运输机被广泛应用在港口、电厂等生产线,在生产中发挥着越来越重要的作用.本次设计的皮带运输机基于改善常规生产中出现的种种状况,通过改进设计将生产要求的安全、可靠、稳定等技术指标进一步提高.皮带运输机核心部分的控制线路设计尤显重要,对实现皮带运输机的启动、调速、反转和制动等进行性能控制;实现对拖动系统的保护;满足生产工艺要求;实现生产过程自动化.在完成设计的过程中一直立足于:设计简单,设计、安装、调整、维修方便,价格低廉,运行可靠.为完善设计和提高设计效率,除了建立必要的数据、符号、标准元件库外,另采用了CAD、PLC等相关分析和计算软件.对控制线路、电动机的设计和选择上,通过反复比较和讨论以求获得最优方案.关键词:电气控制系统;主电路;控制线路;保护电路Abstract:Belt conveyor is widely used in port and power plant generating line,in the production plays an increasingly important role. This belt conveyor design based on the improvement in the conventional production in the various conditions by improving the design requirements of the production will be safe, reliable, stability, and technical indicators have improved further. core part of the belt conveyor control circuit design is particularly important for achieving the belt conveyor, the start of speed, braking and reverse control, etc. Performance ; to achieve the protection of the drive system; meet production process requirements; production process automation. to complete the design process has been based on: simple design, design, installation, adjustment and maintenance convenience, low prices, reliable operation. for the perfect design and improving the design efficiency, in addition to the establishment of the necessary data, symbols, the standard component library, another by the CAD, PLC, and other related analysis and calculation software. control lines, motor design and selection, and through repeated comparisons to be discussed Optimal programme. Key words:electric control system;main circuit;control circuit;;protection circuit(一)设计对象分析根据设计题目,我们所要设计的皮带运输机电气控制系统应满足以下要求:1、“电动机的起动顺序为3# 、2# 、1#,并且有一定的时间间隔,以免沙料在皮带上堆积,造成后面的皮带重载起动”。
皮带输送机电气控制系统的课程设计(含CAD图)
皮带输送机电气控制系统的课程设计(含CAD图)通过对电气控制系统的设计,掌握电气控制系统设计的一般方法,能够设计出满足控制要求的电气原理图,能够设计电器元件布置图、接线图和控制箱,并能够根据负载选择主要电器元件的型号,具有电气控制系统工程设计的初步功能。
皮带输送机由三条皮带组成并由电动机控制。
1#、2#、3#皮带顺序运行。
电动机功率各3KW,其控制要求如下:1、按下系统启动按钮?1#电动机启动?延时2秒?2#电动机启动?延时5秒?3#电动机启动2、按下停机按钮?延时10秒?3#电动机停止?延时10秒?2#电动机停止?延时10秒?1#电动机停止3、 1#电动机过载时,1#、2#、3#电动机全停,2#电动机过载时,2#、3#电动机停止,3#电动机停止时,顺序停机,并设有紧急停车按钮4、具有手动、自动工作方式5、各种指示及报警根据控制要求,采用PLC为中心控制单元,设计出其控制系统的原理图(主电路和控制电路)、元件布置土、接线图以及元件明细表。
所完成的图纸资料包括:1、电气原理图:主电路、控制电路、梯形图、指令系统2、电气箱面板布置图,电气箱内部布置图3、接线图4、元件明细表5、控制箱尺寸6、系统工作原理说明及操作使用说明1、主电路的设计主电路线路如图1所示,图中的M1、M2、M3为输送带电动机,三台电动机都采用直接启动方式,各台电动机分别使用一个接触器控制,各电动机分别由FR1、FR2、FR3提供过载保护,各自通过自锁实现失压保护。
2、 PLC的选择及I/O分配根据给定的控制要求,可统计出现场输入信号共14个,输出信号共8个,故选用OMRON C系列C28P,此型号具有16点输入和12点输出,满足要求。
(I/O分配如表2所示)。
3、 PLC外部接线图的设计PLC根据表2的I/O分配关系和C28P的端子跑列位置进行相应的接线,PLC系统外部接线图在图1中,图中各接触器采用220V电源,信号指示及报警指示灯与接触器共用220V电源。
基于PLC的四级传送带控制系统设计毕业设计
题目:基于PLC的四级传送带控制系统设计任务与要求:设计一个基于PLC的四级传送带控制系统。
启动时先起动最末一条皮带机,经过1秒延时,再依次起动其它皮带机。
停止时应先停止最前一条皮带机,经过1秒延时,再依次停止其它皮带机。
当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机经过1秒延依次停止。
时间:所属系部:自动化工程学院学生姓名:学号:专业:生产过程自动化技术指导单位或教研室:生产过程自动化教研室指导教师:职称:讲师西安航空职业技术学院制毕业设计(论文)进度计划表本表作评定学生平时成绩的依据之一。
摘要现今的社会,科技发展迅速,在工业方面,计算机技术、半导体技术、控制技术、数字技术、通信网络技术等高新技术的发展息息相关,这些高新技术推动了PLC的发展。
今天,我们的生活环境和工作环境有越来越多称之为可编程控制器的小电脑在为我们服务,可编程控制器在工业控制,尖端武器,通信设备,信息处理,家用电器等各测、控制领域的应用中独占鳌头。
本次设计的四级传送带电路采用PLC为控制核心,具备顺序起动和顺序停止功能,而且当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止的自动控制等功能,然后该皮带机以后的皮带机利用定时器定时1S后依次停止。
利用本次设计,初步掌握PLC 的基本控制功能,学会运用PLC,控制基本工业控制。
关键词;S7-200PLC;四级传送带装置;定时器;AbstractToday's society, the rapid development of technology, in industry, the development of computer technology, semiconductor technology, co ntrol technology, digital technology, communication network technolog y is closely linked, these advanced technology to promote the develop ment of PLC. Today, our living environment and working environment is more and more called programmable controller of small computer for o ur services, the programmable controller in the industrial control, s ophisticated weapons, communications equipment, information processin g, application of the test, control home appliances and other fields in the exclusive Ngau tau. The design of the four conveyor circuit us ing PLC as control core, with the sequence starting and order stop fu nction, and when a belt machine failure, automatic control functions of belt conveyor belt and the front stop, stop timing sequence 1S tim er after the use of the belt conveyor belt conveyor and then later. U sing this design, preliminary master the basic control functions of P LC, learn to use the PLC control, industrial control.Keywords;S7-200PLC;four stagetransmissionbelt device;timer目录1概述 (1)1.1 PLC的概述 (1)1.1.1 PLC的历史 (1)1.1.2 PLC的主要功能 (1)1.1.3 PLC的主要特点 (2)1.1.4 PLC的网络通信 (3)1.2 四节传送带系统的历史 (3)1.2.1 四节传送带系统的起源 (3)1.2.2 四节传送带系统的发展 (3)2 S7-200的配置及组态 (5)2.1 PLC的基本结构 (5)2.2 PLC的工作原理 (6)2.3 四节传送带系统的工作要求 (6)2.4 电气原理图与功能详细说明 (6)2.4.1四节传送带的模拟实验面板图: (6)2.4.2输入/输出接线列表 (7)2.4.3 输入/输出接线图 (8)3 四节传送带中S7-200的指令系统及编程 (9)3.1 编程语言 (9)3.2 四节传送带系统的流程图 (10)3.3 四节传送带系统的梯形图 (11)4 四节传送带系统的调试 (17)4.1 软件部分调试: (17)4.2 硬件部分调试: (17)结束语 (18)谢辞 (19)参考文献 (20)1概述1.1 PLC的概述可编程逻辑控制器,PLC (Programmable Logic Controller),一种数字运算操作的电子系统,是以微机处理器为基础,综合了计算机技术、半导体集成技术、自动控制技术、数字技术和通信网络技术发展起来的一种通用工业自动控制技术,它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。
生产线皮带运输机控制系统Ver4
目录前言 ............................................................................ 1摘要 .. (2)第一章绪论 (3)1.1生产线皮带运输机控制系统设计的意义3ﻩ1.2 设计的目的3ﻩ第二章设计的内容与步骤4ﻩ2.1 设计的基本原则 (4)2.2 设计的内容4ﻩ2.2.1基本结构设计 (4)2.2.2 皮带的张紧和跑偏调整装置5ﻩ2.3系统传动方式的确定5ﻩ2.3.1往复运动工作机构传动方式的确定 (5)2.3.2传动方式的选择 (6)2.3.3电动机起动方式的确定 (6)2.3.4电气系统的保护 (6)2.4电气控制方案的确定14ﻩ2.4.1电气逻辑控制装置的选择14ﻩ2.4.2控制方式的选择 (15)2.4.3系统动作要求........................................................ 152.4.4确定I/O点数及PLC的选型16ﻩ2.4.5软件系统设计..................................................... 22第三章皮带的跑偏控制25ﻩ3.1皮带跑偏的原因25ﻩ3.1.1安装时引起的皮带跑偏25ﻩ3.1.2 运行中引起的皮带跑偏26ﻩ3.2皮带跑偏的调整26ﻩ3.3跑偏开关................................................................ 29第四章设计总结 ...................................................................................................... 错误!未定义书签。
致谢 ...................................................................................................................... 错误!未定义书签。
PLC课程设计---四级皮带输送机电气控制电路
课程设计说明书KE CHENG SHE JI SHUO MING SHU课程名称电气控制与PLC课程设计课题名称四级皮带输送机电气控制电路专业班级机电系1001班2012年5月28日课题:四级皮带输送机电气控制电路一.皮带输送机概况及控制要求皮带输送机由4台皮带机组成,4台皮带机分别用4台电动机(M1~M4)拖动,如图1所示,控制要求如下:M1M2M3M4图1 皮带输送机系统示意图(1)启动时先起动第一台皮带机(M1),经过10S延时,再依次起动其它皮带机:(2)停止时应先停止最后一台皮带机(M4),待料运送完毕后再依次停止其它皮带机:(3)当某台皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机后面的皮带机待料运完后才停止。
例如当M2故障时,M1、M2应立即停,经过10S延时后,M3停,再过10S后M4停。
二.设计任务1.设计和绘制电气控制原理图或PC I/O接线图、功能表图和梯形图,编写指令程序清单。
2.选择电气元件,编制电气元件明细表。
3.设计操作面板电器元件布置图。
5.编写设计说明书。
前言一.皮带输送机PLC电气控制系统设计背景及目的皮带输送机是一种摩擦驱动以连续方式运输物料的机械,可以将物料在一定的输送线上,从最初的供料点到最终的卸料点间形成一种物料的输送流程。
皮带输送机既可以进行碎散物料的输送,也可以进行成件物品的输送。
PLC(Programmable Logic Controller),是可编程逻辑控制器。
它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。
PLC是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。
它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。
四节传送带
四节传送带四节传送带目录一、设计目的及意义 (3)二、题目分析 (4)2.1设计目的 (4)2.2设计过程 (4)2.3设计要求 (4)三、任务要求 (5)四、总体设计 (6)1、PLC控制流程图 (6)2、PLC外部接线图 (6)3、PLC芯片型号选择 (7)4、PLC 四级传送带I/O分配表 (7)5、具体流程 (8)(1)连接I/O (8)(2)设计PLC程序 (8)(3)运行程序,查看成果 (11)(4)设计MCGS组态模拟画面 (12)(5)调试并运行 (17)6、结果分析 (18)7、出现的问题 (19)五、分工安排 (19)六、课程设计总结 (19)七、参考文献 (20)附录 (20)一、设计目的及意义可编程控制器简称PLC,是以微处理器为基础,综合了计算机技术、自动控制技术和通讯技术发展而来的一种新型工业控制装置。
它具有结构简单、编程方便、可靠性高等优点,已广泛用于工业过程和位置的自动控制中。
PLC的功能扩展也极为方便,硬件配置相当灵活,根据控制要求的改变,可以随时变动特殊功能单元的种类和个数,再相应修改用户程序就可以达到变换和增加控制功能的目的。
据统计,可编程控制器是工业自动化装置中应用最多的一种设备。
专家认为,可编程控制器将成为今后工业控制的主要手段和重要的基础设备之一,PLC、机器人、CAD/CAM将成为工业生产的三大支柱。
随着工业生产的迅速发展,市场竞争的激烈,产品更新换代的周期日益缩短,工业生产从大批量、少品种,向小批量、多品种转换,继电器—接触器控制难以满足市场要求,此问题首先被美国通用汽车公司(GM公司)提了出来。
通用汽车公司为适合汽车型号的不断翻新,满足用户对产品多样性的需求,公开对外招标,要求制造一种新的工业控制装置,取代传统的继电器—接触器控制。
其对新装置性能提出的要求就是著名的GM10条,即:(1) 编程方便,现场可修改程序;(2)维修方便,采用模块化结构;(3)可靠性高于继电器控制装置;(4)体积小于继电器控制装置;(5)数据可直接送入管理计算机;(6)成本可与继电器控制装置竞争;(7)输入可以是交流115V;(8)输出为交流115V,2A以上,能直接驱动电磁阀,接触器等;(9)在扩展时,原系统只要很小变更;(10)用户程序存储器容量至少能扩展到4K。
124四级皮带电机的PLC电路设计
四级皮带电机的PLC电路设计毕业论文系部:机电工程系学生姓名:专业班级:机电05C1学号:指导教师:13年03月20日目录声明 (3)摘要 (4)PLC简介.........................5-6皮带运输机简介..................7-13注意事项.. (14)遇到的问题 (15)参考文献/小结 (16)致谢 (17)声明本人所呈交的毕业论文,是我在指导教师的指导和查阅相关著作下独立进行分析研究所取得的成果。
除文中已经注明引用的内容外,本论文不包含其他个人已经发表或撰写过的研究成果。
对本文的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:2008-3-20【摘要】为了更好地掌握所学的专业知识,做到理论与实际相结合,我们选择对可编程控制器(PLC)作为这次论文的设计对象。
近年来,可编程控制器技术的发展异常迅猛,使可编程控制器成为集微机技术、自动化技术、通讯技术于一体的通用工业控制装置,成为实现工业自动化的一种强有力的工具,在工业控制的各个领域得到了广泛的应用。
皮带传动构成自动送料装车控制系统,皮带运输机作为连续散状物料运输机械已广泛应用于码头、电厂、冶金、粮食等行业。
并应用于装船机,斗轮堆取料机等散状物料运输机械上。
【关键词】:可编程控制器,皮带运输机ABSTRACTTo better grasp of the specialties of knowledge, to combine theory and practice, we have chosen the programmable controller (PLC) as a design object of this paper. In recent years, programmable logic controller extraordinarily rapid development of technology, a set of programmable controller computer technology, automation technology, communications technology in one generic industrial control devices, industrial automation achieving a powerful tool, in the various fields of industrial control has been widely used.A belt transmission automatically feed loading control system, as a belt conveyor for bulk materials transport machinery has been widely used in terminals, power plants, metallurgy, food and other industries. And applied loading machine, bucket wheel stacker, and other bulk materials transport machinery.【KEY WORD】: PLC, Belt Conveyor可编程控制简介一、可编程控制器基础知识:图2-1 PLC的硬件结构图(一)CPU它是PLC的核心部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四级皮带运输机控制电路设计摘要随着社会的不断进步和发展,人们对皮带运输机要求也越来越高,这就需要我们不断的改善和进步,以满足社会的需求。
数控技术是现代机械行业的顶峰,正向着高速、高精度、安全性、稳定性的方向发展,不仅能够保证运输的安全性,同时还能保证使用的稳定性。
根据人们对皮带运输机的使用要求,并结合数控技术的先进性,采用数控电路系统对皮带运输机控制电路的设计。
首先,确定出四级皮带运输机的电力拖动方案,以及传动方案。
再以列出的电力拖动和传动方案的基础上,合理的选择出驱动电动机。
其次根据电力拖动方案的要求,即四级运输机的控制要求,用经验设计法设计出电气控制线路,其中包括主线路和控制线路。
然后根据设计出的电气控制电路,选择出合理的低压电器元件。
最后以表格的形式列出所选低压电器元件的明细表。
关键词:拖动方案;主线路;控制线路;元件明细;AbstractProgresses unceasingly along with the society and develops, the people are also getting higher and higher to the belt conveyer request, this needs our unceasing improvement and the progress, satisfies social the demand. The numerical control technology is the modern mechanical profession crest, is turning toward, the high accuracy, the security, the stable direction to develop high speed, not can only guarantee that transportation's security, meanwhile can guarantee the use the stability. According to the people to belt conveyer's operation requirements, and unifies the numerical control technology the sophistication, uses the numerical control circuitry to the belt conveyer control circuit's design.First, determines four level of belt conveyer's electric drive plan, as well as transmission plan. Lists again electric drive and in transmission plan foundation, reasonable choice drive motor. Next according to the electric drive plan's request, namely four level of transport aircraft's control requests, designs the electric control line with the empirical design law, including the main line and the control wiring. Then the basis designs the electric control electric circuit, chooses the reasonable low-voltage electrical apparatus part. Finally lists by the form form chooses the low-voltage electrical apparatus part's detailed list. key word:Keywords: Main line; Control wiring; Part detailed list;目录绪论 (1)第1章拖动方案的决定及电动机的选择 (2)1.1 拖动方案的决定 (2)1.2 电动机的选择 (3)1.2.1 选择电动机类型 (3)1.2.2 电动机容量选择 (4)1.2.3 确定电动机额定功率 (5)1.2.4 确定电动机转速 (5)1.2.5 电动机的维护 (6)1.2.6 电动机常见故障 (7)第2章电气控制线路的设计 (8)2 .1 电气原理图设计的基本步骤 (8)2.2电气原理图的设计方法 (8)2.2.1分析设计法 (8)2.2.2逻辑设计法 (9)2.3 原理图设计中应注意的问题 (9)2.3.1选择控制电源 (10)2.3.2选择电器元件 (10)2.3.3减少通电电器的数量 (10)2.3.4合理使用电器触点 (10)2.3.5正确连线 (10)2.4 主线路的设计 (11)2.5 控制线路的设计 (12)第3章电气元件的选择 (16)3.1 刀开关和熔体的选择 (16)3.1.1刀开关的选型 (16)3.1.2熔断器选型 (17)3.1.3各类设备熔断器选择 (18)3.1.4快速熔断器的选择 (18)3.2 热继电器的选择 (19)3.3 交流接触器的选择 (20)3.4 时间继电器的选择 (21)3.5 中间继电器的选择 (22)3.6 按钮开关的选择 (23)元件明细表 (25)设计总结 (26)参考文献 (27)致 (28)绪论在工矿企业中,皮带运输机是常用的短途运输工具之一。
有的在装配线上,有的在码头上,有的在仓库,有的在矿山上。
在煤矿和砂石场,更是重要设备。
皮带运输机输送货物的特点是,电动机带动皮带循环运转,货物置于皮带上随皮带走,运输线路是固定的(有些皮带机可以移动)。
皮带运输机是一种平移的连续运输机械。
例如将煤、砂子、矿石、粮食等不断地从一个地方运到另一个地方,去加工或贮存或由另外的运输机械运输。
它不是长途运输设备,用于库房、料仓、矿山、流水线上。
皮带运输机应用广泛,但有时根据不同的要求,往往需要若干条皮带联合使用构多级皮带运输机。
对于单级皮带运输机(只有一根皮带),其控制很简单,比普通车床还要简单,但多级皮带运输机由于用多个电动机带动,所以对控制顺序的安排有一定的要求。
本文将根据时间顺序要求设计出四级皮带运输机的控制电路,在设计本运输机的控制电路时,首先要要对电气控制电路有一定的基础,具有相当的电气控制电路分析能力,必须对电气控制电路中所使用的低压电器有一定的认识。
由于四台电动机M1、M2、M3、M4带动四条皮带,要求启动时,M1→M2→M3→M4顺序启动,这是为了防止货物在皮带上堆积。
正常停车时,要求按M4→M3→M2→M1顺序停止,以保证停车后皮带上不残存货物。
事故停车时,如M2停车时由M3、M4、立即停车,而M1延时停车。
上述动作均按时间原则控制,以完成四级皮带运输机电路设计。
第1章拖动方案的决定及电动机的选择1.1 拖动方案的决定图1-1 四级运输机总体驱动图图1-2 四级运输机中单级传动图对于四级皮带运输机,其为四根皮带分别传动,则用以四台电动机M1、M2、M3、M4分别带动皮带,总体驱示意图1-1所示。
要求启动时,M1→M2→M3→M4顺序启动,这是为了防止货物在皮带上堆积。
正常停车时,要求按M4→M3→M2→M1顺序停止,以保证停车后皮带上不残存货物。
事故停车时,如M2停车时M3、M4、立即停车,而M1延时停车。
上述动作均按时间原则控制。
在四级皮带运输机中,每一级中电机到工作机之间的传动方案如图1-2所示,已知卷筒直径在D=500MM,运输带的有效拉力F=1500N,运输带速度V=2M/S,卷筒效率为0.96,长期连续工作。
1.2 电动机的选择(1)电动机已经标准化、系列化。
应按照工作机的要求,以经济、合理、安全的原则,根据选择的拖动方案选择电动机的类型、容量和转速,并在产品目录中查找出其型号一、电动机的选型(2)电动机的选用,首先要了解电动机的机械负载特性,根据机械负载的类型和特性来选择电动机的额定容量、额定转速、额定电压以及型式。
(3)要为某一生产机械选配一台电动机,首先要合理选择电动机的功率。
通常根据生产机械负载的需要来选择电动机的功率,同时,还要考虑负载的工作制问题,也就是说,所选的电动机应适应机械负载的连续、短时或间断周期工作性质。
功率选用时不能太大,也不能太小。
选小了,保证不了电动机和生产机械的正常工作;选大了,虽然能保证正常运行,但是不经济,电动机容量不能被充分利用,而且电动机经常不能满载运行,使得效率和功率因数不高。
(4)其次,根据电源电压条件,要求所选用的电动机的额定电压与频率同供电电源电压与频率相符合。
电动机的转速一定要按生产机械铭牌上的要求选择,否则可能改变生产机械的性能。
此外,电动机的结构、防护、冷却和安装形式,应适应使用环境条件的要求,并且要力求安装、调试、检修方便,以保证电机能安全可靠的运行。
1.2.1 选择电动机类型选择电动机种类应在满足生产机械对拖动性能的要求下,优先选用结构简单,运行可靠,维护方便,价格便宜的电动机.电动机种类选择时应考虑的主要容有:(1)电动机的机械特性应与所拖动生产机械的机械特性相匹配;(2)电动机的调速性能(调速围,调速的平滑性,经济性)应该满足生产机械的要求.对调速性能的要求在很大程度上决定了电动机的种类,调速方法以及相应的控制方法;(3)电动机的启动性能应满足生产机械对电动机启动性能的要求,电动机的启动性能主要是启动转矩的大小,同时还应注意电网容量对电动机启动电流的限制;(4)电源种类 在满足性能的前提下应优先采用交流电动机;(5)经济性 一是电动机及其相关设备(如:启动设备,调速设备等)的经济性;二是电动机拖动系统运行的经济性,主要是要效率高,节省电能.目前,各种形式异步电动机在我国应用非常广泛,用电量约占总发电量的60%,因此提高异步电动机运行效率所产生的经济效益和社会效益是巨大的.在选用电动机时,以上几个方面都应考虑到并进行综合分析以确定出最终方案.按照四级运输机的工作要求和条件,选用Y 型全封闭笼型三相异步电动机。
电动机的额定电压为380V 。
电动机有交流电动机和直流电动机之分,由于一般工厂都采用三相交流电,所以采用交流电动机。