铁路道口远程控制系统解决方案样本
铁路道口远程控制系统解决方案
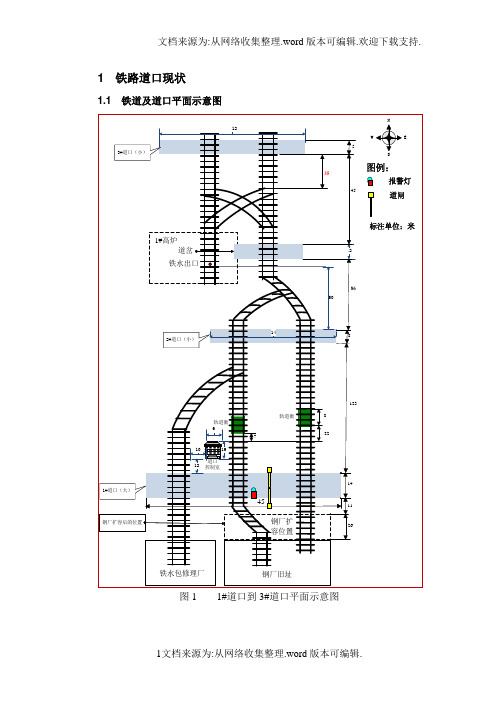
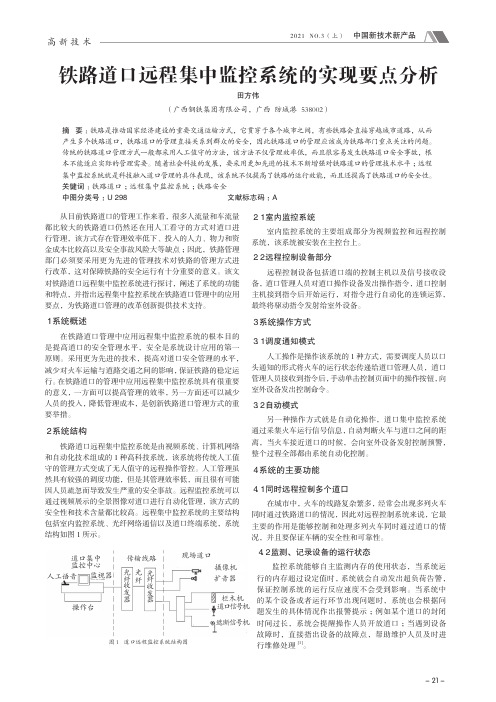
1 铁路道口现状1.1 铁道及道口平面示意图图1 1#道口到3#道口平面示意图图2 3#道口以北平面示意图1.2 各个道口基本情况1.2.1 1#道口1#道口指1#高炉与炼钢厂之间的大道口。
机动车和人均允许通过。
当夏天雨季来临时,1#道口附近的铁轨会严重积水,铁轨表面就会布满水,清理水需要5~6小时。
1#道口附近的值班室,共三个房间:道口值班室、轨道衡值班室、火车调度值班室。
目前,1#道口因施工停止通过。
2月份后,炼钢厂需要向北扩,与轧钢厂的位置平齐,靠1#道口比较近(具体距离见后面的道口平面图);炼钢厂北移后,炼钢厂北面原中间位置的轨道向东移,因此,该轨道从炼钢厂出来后将变直。
炼钢厂北扩后,天车吊铁水罐的位置也会向北移20多米。
粗略估计,当火车头卸下铁水罐,离开一段距离停止时,火车头离道口只有5~6米。
在炼钢厂内,2条铁道是分开的,而且西边轨道比东边的长10多米。
1.2.2 2#道口2#道口(小):指1#高炉与炼钢厂之间的小道口,主要通过铲车,上露天料;一般不允许其它机动车通行;允许人走。
1.2.3 3#道口3#道口(小):指1#高炉与2#高炉之间的小道口,主要是人行道口,不走机动车。
1.2.4 4#道口4#道口:指2#高炉与3#高炉之间的大道口,机动车和人均允许通过。
目前声光报警器和道闸均配备,最为繁忙。
1.2.5 5#道口5#道口:指3#高炉与4#高炉之间的道口。
只通过铲车上露天料,一般不允许通过其它机动车;允许人通行。
1.3 道口设备参数和运行情况1.3.1 主要道口设备参数●道口设备道闸控制:电源220V AC,道口电控箱控制,抬/落杆时间均为5秒。
(通过改造后,可使用开关量控制。
)●报警器规格:电源36V AC,采用100W灯泡。
●道口的电源都是来自于附近的高炉,均为220V AC。
1.3.2 主要道口设备(1#、4#)运行情况道口报警与道闸动作的时间关系为:●火车头(或尾)接近道口50米左右时,火车司机通过对讲机,通知道口值班员,道口值班员走到道口,通过遥控器进行声光报警;然后等待15~20秒后,通过外置的道口电控箱开始落下道杆;●火车尾(或头)一过道口离开段,马上抬杆放行。
铁路道口远程集控系统在地方铁路的应用
铁路道口远程集控系统在地方铁路的应用摘要:企业铁路的安全问题一直都受到了企业生产的高度重视。
造成这一现象的原因是因为道口安全控制系统的高效性、灵活性和可靠性的协调不够。
针对这个问题,在我国的周台子村最近提出了远程集控系统控制模式。
并且通过实践表明,该模式实行的可行性非常之高。
而且对提高铁路道口的安全管理水平有很大的帮助,可以让我国的铁路道口安全管理更加人性化、信息化和自动化。
本文作者就主要是对周台子村铁路道口的远程集控系统进行的分析。
关键词:铁路道口远程集控铁路运输中图分类号:td634 文献标识码:a 文章编号:1007-9416(2013)01-0024-011 项目背景承德张双地方铁路横穿周台子村与省道之间,与周台子村公路相交,形成周台子中心道口,并安装道口信号设施。
[1]根据周台子村的规划,东西新增两条道路,形成周台子东道口、周台子西道口,无道口信号设备,设临时看守人员,存在安全隐患,为了保证运输安全急需规范道口信号设施。
2 道口设备现状及应用模式(1)周台子中心道口为设施齐全的有人看守道口,保留原有设施不变。
东西道口为有人看守临时道口,需新增道口信号机,道口栏木机。
(2)管理模式:集控中心设置在中间的周台子道口房内,设置一个操作控制台,同时控制东西两个道口,其中周台子中心道口保持原有的控制模式不变。
(3)作业模式:列车开车前,由车站调度员通知道口集控操作员列车开行信息,当列车接近道口,道口操作员听见道口音响报警,且道口操作员通过东西两端远端摄像机自行观看到列车接近画面时,启动公路声光报警装置,落下栏木机,开放铁路遮断信号。
必要时,可以语音通知道口列车接近,请车辆、行人避让。
当机车司机看到遮断信号灯的通行信号后方可通过该道口。
[2]3 周台子道口远程集控系统的实现3.1 道口集控系统的组成本系统由室内设备、室外设备两大部分组成。
室内和室外设备通过光纤进行信号传输。
室外设备采取集中由中心供电的方式。
城市无人值守铁路道口自动控制系统
PLC 微控制器是一种工业级的微控制器,具有 很好的稳定性,而且高度集成。因此本控制系统采 用 PLC 微控制器作为控制核心。选择合适的机型 是 PLC 控制系统硬件配置的关键问题。根据实际 情况,该控制系统共有 17 个 I/O 点数,其中 8 个输入 9 个输出。考虑 I/O 点数以及所需存储器容量,选 用西门子 S7-200 系列,CPU 型号选择 CPU224,该 型号 CPU 具有 14 个数字量输入和 10 个数字量输 出,由 24V 稳压电源供电,选择继电器输出。该型 号 CPU 完全能满足该系统的控制功能。
1 系统组成
1.1 总体设计方案 城市无人值守铁路道口自动控制系统的总体
设计方案如图 1 所示。图中所示路口是城市中最常 见的设置有交通灯的铁路和公路交叉路口。该控 制系统主要由检测部分、控制部分、机械部分和报 警装置组成。检测部分采用光电传感器作为检测 设备,控制部分采用西门子 S7200PLC 作为主控制 器,机械部分采用力矩电机带动栏杆的升降,报警 部分采用声光报警器进行报警。另外,在十字路口 设置有四组交通灯,每组交通灯都有红、黄、绿三 色。
图 1 控制系统的总体结构 Fig.1 The general structure of control system
该控制系统工作过程如下。当没有轻轨通过 时,十字路口交通灯正常的时序为:绿灯亮 20s,然 后绿灯闪 3s,黄灯亮 2s,之后变为红灯,红灯亮的时 间为 25s。检测火车接近的光电传感器安放在离铁 路道口 300m 的距离处,检测火车离开的光电传感 器安放在火车离开方向接近铁路道口的一侧。从 光电传感器检测到火车到来至火车通过道口所花 的时间基本是固定的。当光电传感器检测到列车 到来时,立即启动报警装置,5s 之后放下栏杆。同 时根据列车来时南北向的交通灯情况对东西南北 两个方向的交通灯进行相应的调整。当光电传感 器检测到火车离开的信号时,自动取消报警并升起 栏杆,同时根据车走时南北向的交通灯情况对东西 南北两个方向的交通灯进行相应的调整。 1.2 感应部分
柳钢道口远程集中控制系统适用型方案的设计与应用
柳钢道口远程集中控制系统适用型方案的设计与应用摘要:随着逐年升高的人工成本,传统的单个道口管控模式已经不适应企业发展要求。
道口远程集中控制系统的建设可以大幅提高道口的生产效率和降低人工成本,可以为企业带来很客观的经济效益。
设计一套既实惠又实用并且能够确保铁路道口安全的、适用柳钢道口的集中控制系统方案并具体应用。
关键词:道口远程集中控制系统设计Abstract:with increasing labor costs,a single crossing of the traditional regulatory model has not adapted to the requirements of enterprise development. Crossing can significantly improve the crossing of remote centralized control system of production efficiency and reduce labor costs,you can generate objective economic benefits for the enterprise. Design a affordable and practical and be able to ensure the safety of railway level crossing,which willow crossing and application of centralized control system of steel.Key words:level crossing long-range centralized control system devise一、背景截止2017年9月,柳钢厂内铁路道口一共89个,其中有人看守30个,无人看守59个。
2015年和2017年由外方采用PLC系统设计施工建设完成两处道口集控,但其建设成本较高,每处平均30多万。
铁路道口远程集中监控系统的实现要点分析
- 21 -高 新 技 术从目前铁路道口的管理工作来看,很多人流量和车流量都比较大的铁路道口仍然还在用人工看守的方式对道口进行管理,该方式存在管理效率低下、投入的人力、物力和资金成本比较高以及安全事故风险大等缺点;因此,铁路管理部门必须要采用更为先进的管理技术对铁路的管理方式进行改革,这对保障铁路的安全运行有十分重要的意义。
该文对铁路道口远程集中监控系统进行探讨,阐述了系统的功能和特点,并指出远程集中监控系统在铁路道口管理中的应用要点,为铁路道口管理的改革创新提供技术支持。
1 系统概述在铁路道口管理中应用远程集中监控系统的根本目的是提高道口的安全管理水平,安全是系统设计应用的第一原则。
采用更为先进的技术,提高对道口安全管理的水平,减少对火车运输与道路交通之间的影响,保证铁路的稳定运行。
在铁路道口的管理中应用远程集中监控系统具有很重要的意义,一方面可以提高管理的效率,另一方面还可以减少人员的投入,降低管理成本,是创新铁路道口管理方式的重要举措。
2 系统结构铁路道口远程集中监控系统是由视频系统、计算机网络和自动化技术组成的1种高科技系统,该系统将传统人工值守的管理方式变成了无人值守的远程操作管控。
人工管理虽然具有较强的调度功能,但是其管理效率低,而且很有可能因人员疏忽而导致发生严重的安全事故。
远程监控系统可以通过视频展示的全景图像对道口进行自动化管理,该方式的安全性和技术含量都比较高。
远程集中监控系统的主要结构包括室内监控系统、光纤网络通信以及道口终端系统,系统结构如图1所示。
2.1 室内监控系统室内监控系统的主要组成部分为视频监控和远程控制系统,该系统被安装在主控台上。
2.2 远程控制设备部分远程控制设备包括道口端的控制主机以及信号接收设备,道口管理人员对道口操作设备发出操作指令,道口控制主机接到指令后开始运行,对指令进行自动化的连锁运算,最终将驱动指令发射给室外设备。
3 系统操作方式3.1 调度通知模式人工操作是操作该系统的1种方式,需要调度人员以口头通知的形式将火车的运行状态传递给道口管理人员,道口管理人员接收到指令后,手动单击控制页面中的操作按钮,向室外设备发出控制命令。
企业无人值守铁路道口远程集控系统方
企业无人值守铁路道口远程集控系统方案
北京锐奇视讯科技有限公司
关键字:无人值守、铁路道口、远程自动控制、集控系统
系统简介
“企业无人值守铁路道口远程集控系统”是我公司采用最新技术研发的企业铁路道口远程控制技术。
近年来铁路道口的“瓶颈”问题日益突出,险象环生,交通纠纷经常发生,对企业的生产发展造成较大影响,“小道口”严重威胁着企业铁路系统的安全生产,人命关天,鉴于此我公司创新理念将视频监控、自动控制和计算机网络三种技术的有机结合,实现了铁路道口安全控制的跨越式进步。
我们拥有雄厚的技术力量、高素质的专业队伍,随时为有需求的客户提供一流的设计方案和技术支持。
系统目标
加强企业铁路道口行车和行车安全;降低道口人员的使用成本,提高生产率;实现远程集控监管;利用自动化设备,实时掌握道口情况;随时录制道口情况视频录像,便于历史查证。
系统特性:
安全性高;控制方式多样;技术先进;可扩展性高。
系统主要功能
本系统由视频监控系统、远程控制系统和公共广播三个子系统组成,通过光网络进行传输。
室外控制箱执行室内控制指令,开放、关闭道口音响、报警指示灯,开放、栏木机栏杆升起、落下。
并将现场的电源、栏木机升起、落下状态返回室内。
原箱体内设有手动转换开关,便于现场情况变化,现场人员操作设备。
主控室可通过该套系统对道口的安全设施进行远程控制。
在火车到来前的某一时刻,开启相应道口音操作界面,点击报警指示灯,告诉行人及车辆注意安全,将车辆停在安全位置。
道口栏木栏杆落下,放置水平位置,阻断道路。
机车通过道口,道口栏木机栏杆升起,放置垂直位置,开放公路,关闭相应道口操作界面。
铁路道口远程集控系统在淮北矿区铁路的应用
铁路道口远程集控系统在淮北矿区铁路的应用摘要:近年来,随着淮北矿业集团高质量发展步伐的逐步推进,为了更好地实现矿区“无人则安,人少则安”的安全理念,加大智能化管理水平,提高矿区铁路道口安全,压缩道口人力资源成本,集团铁运处引进先进的铁路道口远程集控技术,通过道口设备系统、光纤通信系统、集中远控系统的应用,实现铁路道口的远程自动控制。
关键词:矿区铁路道口远程集控自动控制1 系统应用背景淮北矿业集团铁路运输处南部新区现有道口367个,包括有人20个有人看守道口和347个无人看守道口。
有人看守道口多数位于省道、县道上,无人道口多位于乡村道路和各类企业厂区道路上,位于省道、县道上的有人看守道口各类机动车、行人过往频繁,不少位于列车流量较大的区间或车站,以韩五道口为例,每日接发列车平均35趟以上,且位于国道237上;部分无人道口在农忙季节和上下班时间人员车辆较多,给安全运输带来巨大隐患。
特别是近年来,随着矿区铁路的不断延伸,运量的逐步增大,铁路道口安全问题日益突出,路外交通纠纷时有发生,对矿区铁路的安全运输造成较大影响;同时有人看守道口作业人员多,人力资源成本较高,并且由于道口人员结构老龄化,未来几年会有大量人员退休,道口岗位缺员问题将进一步突显。
针对道口安全压力大、管理成本高、即将面临的缺员问题以及集团公司“无人则安,人少则安”的安全管理思想,淮北矿业集团铁路运输处决定对道口远程集控,通过机械化减人和智能化替人,既减员提效,又保障矿区铁路交通安全。
结合我处实际情况和列车运行区段,现将小湖集站至李槽坊站区间的5处道口纳人远程集控系统,设置1处控制中心(位于李槽坊车站信号楼),对其他5处道口进行集控,等使用成熟后,再推广其他道口。
2 系统组成与功能要求2.1系统的组成及原理本集控系统是以通过控制室中的集控平台软件对现场每一个道口摄像机、道口栏木机、道口信号机及遮断信号机实行远程监控及控制(图1),由道口设备系统、光纤通信系统、集中远控系统组成(图2)。
运用PLC实现道口远程控制的自主尝试
运用PLC实现道口远程控制的自主尝试作者:钟晓波来源:《科学与技术》 2018年第6期摘要:随着柳钢厂内铁路道口数量的增加,道口看守人员也势必要增加。
鉴于目前企业用工成本越来越高的现实,实现道口的远程控制并推进多个道口集中控制就显得势在必行了。
目前柳钢厂内已经有部分道口实现了远程集中控制,全部属于外委工程。
由于外委工程往往建设成本高且在后期的维护管理方面存在受制于人的情况。
本文是介绍本单位维修部门借鉴和运用PLC实现道口远程控制的一次自主尝试,为下一步独立建设道口远程集中控制做前期的技术准备。
关键词:铁路道口;PLC;远程;集中控制1 背景由于厂内铁路道口多达上百处,其中包括有人看守和无人看守道口。
地处柳钢红星B区的强实水泥厂门口的强实道口就是无人看守道口之一。
在2018年的7月3日下午14时22分左右,一辆满载散装水泥的罐车从强实厂门口驶出,没有遵守道口交通规则而抢越道口,正好此时有一列车从B区站向东行驶,当火车调车员发现罐车时,立即呼唤火车司机紧急刹车,由于火车惯性太大,刹车距离不够最终还是撞上了,罐车被撞翻在铁路旁。
所幸的是,该起事故没有造成人员伤亡,只是两车出现了不同程度的损坏。
事后的事故原因调查结果虽然与铁路方无关,但是该道口没有设置栏杆也是事故发生的原因之一。
铁路运输公司鉴于近两年该区域发生过三起类似的道口交通事故的情况,要求电务部门及时安装栏木等安全防护设备。
但是现场没有建设道口房,如果要操作栏木机只能是利用视频监控手段实现远程控制,建议控制设备安装在红星B区站,由行调人员实行栏杆的控制。
铁运公司决定将该道口安装远程控制设备做为2018年的攻关项目和隐患整改项来实施,具体由机动科和电务段负责实施。
2 讨论研究阶段成立攻关小组的初期,小组成员就在讨论远程控制的实现方式该使用哪种模式。
因为在轧四道口做过一个远程的控制系统,使用的是网络开关,而此次机动科提出使用PLC-300系列可编辑控制器。
铁路微机联锁信号应用于道口远程集控
铁路微机联锁信号应用于道口远程集控摘要:柳钢厂区内大大小小的铁路道口有几十个,因道口工人员紧张,不能对所有的道工进行人工看守,无人看守道口是道口事故的高风险区域,为了减少铁路道口交通事故,铁运公司通过采取远程集中控制的模式,对多个无人看守道口远程进行关杆开杆操作,保障铁路行车安全,远程集控在实际操作过程中存在一定的不足,就是不容易掌控远程道口的机车作业动态,通过把铁路线路微机联锁信号应用于铁路远程控制,能有效的解决这个问题。
关键词:铁路;微机联锁;道口远程集控;道口安全1 前言近年来,随着柳钢集团的快速发展,已实现了1100万吨钢的历史性突破。
精煤、矿粉、精粉等大宗原燃料物资的需求量也大幅增加。
由于柳钢生产所需的大宗原燃料物资约有90%需通过铁路运输组织进厂,如按1100万吨钢的年产量测算,柳钢大宗原燃料物资路车日均进厂量提升至1200辆,因此各铁路道口的机车作业次数增加许多。
无人看守铁路道口常出现火车准备通过道口时有汽车抢道通过的事件,对铁路行车是很大的安全隐患。
为了减少铁路道口安全隐患,保障行车安全,铁运公司增加了道口远程集控的数量,尽可能把安全隐患较大和机车作业频繁的无人看守道口纳入远程控制。
但是远程监控的摄像头角度范围有限,不能全面了解道口现场实际的情况,不便于观察判断车辆的运行动态,对远程放杆操作及时性和安全性带来一定的影响。
2 方案设计及实施2.1方案设计铁运公司四个站点均配有微机集中联锁系统,简称微机联锁。
铁路方面的计算机联锁是保证车站内列车和调车作业安全,提高车站通过能力的一种信号设备。
利用计算机对车站作业人员的操作命令及现场设备状态表示的信息进行逻辑运算,从而实现对信号机及道岔、进路等进行集中控制,使其达到相互制约,以保证行车安全的车站联锁设备,即微机集中联锁。
微机联锁能够通过联锁控制图直观显示铁路站场的线路状态,开通方向等信息,并且这些联锁状态数据是可靠和安全的。
通过光纤网络把微机联锁的采集服务器和各个铁路道口控制室的电脑组成一个计算机网络,通过电脑站场图程序把微机联锁的状态呈现出来,在各个远程道口集中控制室实时查看,跟踪观察机车的行走方向和线路信号开通状态,就能够预知火车的行走方向和动态、各线路开通的情况,并结合远程道口视频监控摄像头查看道口现场情况和道口安全状态,保障有充足的时间提前放好道口栏杆,解决火车和汽车同时临近道口再急忙放杆或汽车抢道通过不能及时放杆的问题,大幅度减少道口抢道事件的事件发生。
铁路与公路交叉口护栏自动控制系统
PLC课题铁路与公路交叉口护栏自动控制系统姓名:学号:班级:目录一、任务要求 (3)二、系统总体方案 (3)三、控制系统主电路设计 (4)四、PLC型号选择及其他PLC元器件分配 (5)五、PLC控制系统硬件接线图 (6)六、程序框图和梯形图 (7)6.1程序框图 (7)6.2梯形图 (8)七、心得体会 (10)八、参考资料 (10)一、任务要求本设计是护栏自动控制系统。
是由超声波传感器和振动传感器来控制的。
设计中采用了压力传感器检测火车信号。
护栏的升降采用三相异步电动机启动。
三级减速外啮合齿轮传动减速器。
控制系统选用FX1N PLC控制。
利用限位开关对护栏位置控制。
栏木机上还装有电磁摩擦制动器,保证护栏可以处在水平和垂直两个极限状态,同时还具备及时制动功能,可使栏杆保持在任何状态。
当机车通过交叉口若干分钟以前,公路段上红灯亮,警铃响,护栏自动(手动)下降。
当机车离开时,公路段上绿灯亮,护栏升起,行人及汽车通过。
二、系统总体方案在铁路和公路的交叉口处,汽车、行人的各自交通皆应受交叉口护栏的开启、关闭的控制。
以及指示灯、响铃的提示。
这种控制和提示可以用PLC去完成。
自动控制系统中,选用超声波传感器和振动传感器共同检测机车到来的信息。
采用两种传感器共同检测可以降低系统的误动作。
确保交通的安全和车辆的畅通。
当机车要通过交叉口若干分钟之前,传感器得到信号后。
PLC控制声光报警器。
此时,公路段上红灯亮、警铃响。
系统向机车司机及行人提示,机车要通过交叉口,公路段要关闭。
PLC控制电动机得电,电动机转动,护栏下降。
当机车离开时,振动传感器得到信号后。
PLC控制电动机反转、护栏升起。
其结构如图1.1所示。
图1.1 交叉口布置图图中A1、B1的位置距道口2公里,A2、B2的位置距道口1公里。
在铁路和公路的交叉口处,汽车、行人的各自交通皆应受交叉口护栏的开启、关闭的控制。
以及指示灯、响铃的提示。
这种控制和提示可以用PLC去完成。
道路交通远程监控系统解决方案
道路交通远程监控系统解决方案XXX科技有限公司2023.8目录第一章需求分析 ............................................................................................. 错误!未定义书签。
一.应用背景 (2)二. 用户需求 (2)第二章解决方案 ............................................................................................. 错误!未定义书签。
2.1系统结构................................................................................................. 错误!未定义书签。
2.1.1 前端摄像部分................................................................................. 错误!未定义书签。
2.1.2 数据采集部分................................................................................. 错误!未定义书签。
2.1.3 网络传输部分................................................................................. 错误!未定义书签。
2.1.4 中心控制部分................................................................................. 错误!未定义书签。
2.1.4.1 网络主控集群服务器.............................................................. 错误!未定义书签。
专用铁路道口远程集中智能控制系统建设研究
专用铁路道口远程集中智能控制系统建设研究作者:杨金辉来源:《山东工业技术》2016年第15期摘要:企业铁路中传统的值守作业方式,效率低成本高且存在安全隐患,已不适应现有的发展形势,因此,通过采取先进、有效的技术措施改革企业铁路道口作业方式,将传统的有人值守改变为“远程可监视可控制的无人值守”,构建无人值守的铁路道口远程集控管理系统,不仅可以提高铁运效能,而且可以增加铁路运输安全保障能力。
关键词:无人道口;远程智能控制;系统功能及特点DOI:10.16640/ki.37-1222/t.2016.15.1111 系统概述目前大部分企业铁路一直采用有人值守的传统作业方式管理人、车流量大的重要道口,效率低成本高而且存在安全隐患。
因此,改革企业铁路道口作业方式,对提高铁运效能、加强安全保障有着非常实际的意义。
专用铁路道口远程集中智能控制系统研究通过采取先进、有效的技术措施尽可能减少铁路道口对铁路、公路运输的干扰,提高列车运行安全性和运输生产效率。
系统从设计开始就把保证道口安全放在第一位,通过引进其它领域的先进且成熟的技术措施努力提高对道口的管理,最大化的提升道口安全,并尽可能快封闭道口降低道口对火车运输和公路运输的相互影响,同时改善道口环境。
铁路道口集控将道口现场的人工管理改变为人工远程管理,大量减少道口管理人员,可产生较大经济效益。
铁路道口远程集控创新铁路道口的管理模式,改革通过铁路道口的运输作业流程,将传统的有人值守改变为“远程可监视可控制的无人值守”,撤销道口看守员,改由调度员根据列车生产作业直接远程控制道口作业,同时强化基础管理、严格考核制度,构建无人值守的铁路道口远程集控管理系统。
2 系统结构专用铁路道口远程集中智能控制系统正是针对企业铁路道口安全现状提出的解决方案,利用视频监控、自动控制和计算机网络三种技术的结合实现:将有人值守道口改进为“无人值守远程操控道口” 、将无人值守道口升级为“无人值守远程操控道口” 由调度和管理能力强、工作严谨的人员在调度指挥中心通过实时视频全景图像和远程工业控制技术,实现对散布在厂区的各个道口进行更严格的虚拟的有人值守道口控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 铁路道口现状
1.1 铁道及道口平面示意图
图1 1#道口到3#道口平面示意图
图2 3#道口以北平面示意图
1.2 各个道口基本情况
1.2.1 1#道口
1#道口指1#高炉与炼钢厂之间的大道口。
机动车和人均允许经过。
当夏天雨季来临时, 1#道口附近的铁轨会严重积水, 铁轨表面就会布满水, 清理水需要5~6小时。
1#道口附近的值班室, 共三个房间: 道口值班室、轨道衡值班室、火车调度值班室。
当前, 1#道口因施工停止经过。
2月份后, 炼钢厂需要向北扩, 与轧钢厂的位置平齐, 靠1#道口比较近( 具体距离见后面的道口平面图) ; 炼钢厂北移后, 炼钢厂北面原中间位置的轨道向东移, 因此, 该轨道从炼钢厂出来后将变直。
炼钢厂北扩后, 天车吊铁水罐的位置也会向北移20多米。
粗略估计, 当火车头卸下铁水罐, 离开一段距离停止时, 火车头离道口只有5~6米。
在炼钢厂内, 2条铁道是分开的, 而且西边轨道比东边的长10多米。
1.2.2 2#道口
2#道口( 小) : 指1#高炉与炼钢厂之间的小道口, 主要
经过铲车, 上露天料; 一般不允许其它机动车通行; 允
许人走。
1.2.3 3#道口
3#道口( 小) : 指1#高炉与2#高炉之间的小道口, 主要
是人行道口, 不走机动车。
1.2.4 4#道口
4#道口: 指2#高炉与3#高炉之间的大道口, 机动车和人
均允许经过。
当前声光报警器和道闸均配备, 最为繁忙。
1.2.5 5#道口
5#道口: 指3#高炉与4#高炉之间的道口。
只经过铲车上
露天料, 一般不允许经过其它机动车; 允许人通行。
1.3 道口设备参数和运行情况
1.3.1 主要道口设备参数
●道口设备道闸控制: 电源220VAC, 道口电控箱控制, 抬
/落杆时间均为5秒。
(经过改造后, 可使用开关量控制。
)
●报警器规格: 电源36VAC, 采用100W灯泡。
●道口的电源都是来自于附近的高炉, 均为220VAC。
1.3.2 主要道口设备( 1#、 4#) 运行情况
道口报警与道闸动作的时间关系为:
●火车头( 或尾) 接近道口50米左右时, 火车司机经过对
讲机, 通知道口值班员, 道口值班员走到道口, 经过遥
控器进行声光报警; 然后等待15~20秒后, 经过外置的道口电控箱开始落下道杆;
火车尾( 或头) 一过道口离开段, 马上抬杆放行。
延时2秒左右, 取消声光报警。
1.4 高炉
1#高炉比较特殊, 向南没有铁轨, 出铁水过程为: 火车向北运行, 经道岔并到东边轨道, 然后倒车向南运行到炼钢厂。
1#高炉附近的单轨在改造后, 会变短, 大概10米左右( 现30米左右) 。
2#高炉、 3#高炉和4#高炉内部的轨道均为双向轨道, 火车都能够双向运行。
一般情况下, 当1#高炉( 450m3) 、 2#高炉( 580m3) 、 3#高炉( 450m3) 都正常运行时, 需要2辆火车在轨道运行。
当4#高炉( 1080m3) 正常生产时, 需要3~4辆火车在铁道上运行。
1.5 铁道和火车相关
1.5.1 基本铁道参数
铁轨参数: 50铁轨, 50kg/m, 长12.5m。
火车轮间距: 1435mm。
火车车头单侧2个车轮, 铁水包单侧4个车轮。
1.5.2 火车运行情况
火车运行速度: 5~6Km/h, 空载车( 以下简称”空车”) 速度稍高, 装载铁水的火车( 以下简称”实车”) 速度较低, 一般要求不超过5Km/h。
一般情况下, 火车会拉3~4节左右的铁水罐( 每节铁水罐长度为7.5米, 车头基本也7.5米) 。
火车拉的铁水罐数量因铁道的不同而不同, 其中, 东边的铁道( 该轨道在炼钢厂的尽头有坑道, 比西边的短10多米) , 最多允许拉4节铁水罐; 西边的铁道, 最多允许拉7节铁水罐。
一般情况下, 1个车头用1个铁道: 空车拉, 实车倒, 车头始终朝北。
其中, 当实车到达炼钢厂后, 到达合适位置。
处于安全考虑, 火车头卸下铁水罐, 开出来后在外面, 等待铁水罐清空, 再挂上空铁水罐。
有时, 空载火车头会到别的高炉, 拉新的铁水罐。
正常情况下, 如果需要换车头, 都会将火车停在1#道口附近的道岔上, 即3条轨道变2条轨道附近。
火车走在铁路上, 偶然调头回去, 发生这种情况的原因为: 轨道衡没有出现合适的重量, 需要火车倒回去重新经过一遍轨道衡, 因此, 不可能出现火车倒回到出发位置( 如某个高炉或炼钢厂) 的情况。