KOMAX自动机PPT幻灯片
元胞自动机简介ppt课件

1
元胞自动机(Cellular Automata)简要发展历程
• 元胞自动机是定义在一个由离散、有限状态的元胞组成的元胞空间上,按照 一定的局部规则,在离散时间维度上演化的动力学系统。
• 冯诺依曼提出模仿人脑的行为,人脑包含自控制和自维护机理。考虑在完全 离散的框架下处理,每个元胞都具有内在的状态,由有限数量的信息为组成; 这个元胞系统按照离散时间进行演化
反射型:指在边界外邻居的元胞状态是以边界为轴的镜面反射。 定值型:指所有边界外元胞均取某一固定常量,如0,1等。 在实际应用中,尤其是二维或更高维数的构模时,可以相互结合。
如在二维空间中,上下边界采用反射型,左右边界可采用周期型
13
4)规则(Rule)
根据元胞当前状态及其邻居状况确定下一时刻该元胞状 态的动力学函数,简单讲,就是一个状态转移函数。 记为f: sit+1=f(sit,sNt),sNt为t时刻的邻居状态组合,我们称f 为元胞自动机的局部映射或局部规则
即:f为:
T 111 110 101 100 011 010 001 000
T+1
1
0
1
1
1
0
0
0
28
1.2 结果
时空分布图
横轴:空间 纵轴:时间
29
2 二维基本模型
30
2.1模型的建立
• 考虑一个L*L的网格,对任一格子(i,j),共有三 种状态,即有一个向右行驶的车、有一个向 上行驶的车和空。行驶规则为奇数时间向右 行驶的车可以前进,且一辆车只有前方格子 里空时可前进一格。不能跟驰,偶数时间步 向上的车可以行驶,规则同右行。
9
最新komax 机器资料讲课稿
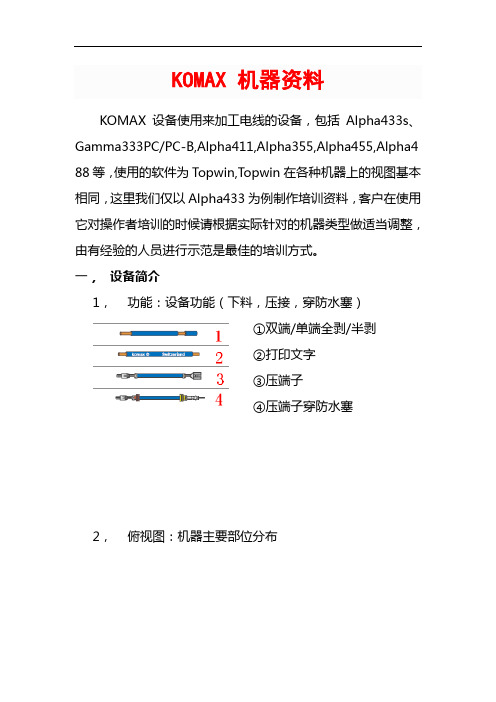
KOMAX 机器资料KOMAX设备使用来加工电线的设备,包括Alpha433s、Gamma333PC/PC-B,Alpha411,Alpha355,Alpha455,Alpha4 88等,使用的软件为Topwin,Topwin在各种机器上的视图基本相同,这里我们仅以Alpha433为例制作培训资料,客户在使用它对操作者培训的时候请根据实际针对的机器类型做适当调整,由有经验的人员进行示范是最佳的培训方式。
一,设备简介1,功能:设备功能(下料,压接,穿防水塞)①双端/单端全剥/半剥②打印文字③压端子④压端子穿防水塞2,俯视图:机器主要部位分布3,操作台分布图:4,TOPWIN各个界面简介a)配置界面:用于机器配置,操作者用不到b)工艺界面:设置工艺参数,(见软件详解)c)样品界面:加工样品取样,(见软件详解)d)生产界面:用于自动生产,(见软件详解)e)错误统计:显示错误信息,操作者用不到。
f)状态统计:显示生产状态,操作者用不到二,软件详解a)工艺界面总体视图:在工艺界面中,我们可以根据工艺卡的规定的导线规格、长度、剥头长度、端子和雨塞等建立待加工产品或者选择以前建立的工艺进行加工。
对应上图中所标数字部位的说明:①:后端剥皮长度,鼠标左键点击数字可更改,单位是毫米②:加工长度,鼠标左键点击数字可更改,单位毫米③:前端剥皮长度,鼠标左键点击数字可更改,单位毫米④:进线驱动部位,鼠标左键点击可进入导线选择和编辑界面⑤:端子压接机,鼠标左键点击可进入端子选择和编辑界面⑥:雨塞加工设备,鼠标左键点击可进入雨塞选择和编辑界面⑦:背景黄色并显示电源可打开,此时可按下给电按钮i.选择或添加导线(名称,线径,颜色)第一步:第二步:(鼠标点击上图所示后弹出下面窗口)第三步:(在第二步中选择建立/复制后弹出下面界面)第四步:输入导线规格颜色①这里输入导线截面积,比如0.5平方毫米②这里输入导线芯线直径,一般使用默认值即可③这里输入绝缘皮直径,一般使用默认值即可④这里用来设置线的颜色,可设多色线⑤点此按钮将正在编辑的线加载为要加工的线ii.选择或添加端子(名称,尺寸,外观)第一步:鼠标左键点压接机位置(类似于添加线)第二步:选择你需要的端子,如果没有选择“建立/复制”第三步:输入端子序号(类似于添加线)第四步:输入端子数据,如下图①鼠标点这里可进入速度设置界面,可使用默认选项②鼠标点这里进入CFA设置界面,操作者禁用③这里输入端子长度,参考⑥位置所示④这里输入该端子需要的剥头长度,工艺卡上有规定⑤端子样式,都是开式端子垂直地,不需要更改⑥端子图象,可以看到端子长度剥头长度测量位置iii.选择或添加雨塞(名称,尺寸,颜色)雨塞的选择和建立复制过程等同与端子,不再复述。
最新KOMAX自动机

在1 侧,0.1mm-15mm 在2 侧, 在1 侧,0.1mm-15mm 在2 侧, 在1 侧,0.1mm-18mm 在2
0.1mm-15mm
0.1mm-15mm
侧,0.1mm-18mm
0.125 -5.0 平方毫米 (AWG 26- AWG 10)
0.2 到6.0 平方毫米
0.15 到6.0 平方毫米
安全装置
主
紧 急
电 源 开
停
关
止
CC60型
切线机培训
• 切线机结构介绍 • 切线、剥皮、压接动作讲解 • 切线机操作软件使用介绍 • 切线机日常保养和定期保养介绍 • 软件高级用户使用介绍 • 切线机常见故障排除方法
注:前4点适用于生产操作工培训;最后2点仅适用于维 修工培训
______________________________ ____________________
多数为KOMAX专有备件
______________________________
基本备件为通用件,在市场 能购买到
____________________
V
cutter downtime rate 2006 2007
2006-2007维修停机率统计汇总
Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec 平均值 1.25% 1.59% 2.19% 1.88% 1.28% 1.48% 2.66% 2.51% 2.08% 1.63% 1.86% 1.55% 1.83% 1.50% 1.32% 2.02% 1.49% 2.06% 1.23% 1.04% 0.77% 1.23% 0.78% 0.86% 1.04% 1.28%
全自动面包机产品培训(精选)PPT文档37页
2、要冒一次险!整个生命就是一场冒险。走得最远的人,常是愿意 去做,并愿意去冒险的人。“稳妥”之船,从未能从岸边走远。-戴尔.卡耐基。
梦 境
3、人生就像一杯没有加糖的咖啡,喝起来是苦涩的,回味起来却有 久久不会退去的余香。
全自动面包机产品培训(精选) 4、守业的最好办法就是不断的发展。 5、当爱不能完美,我宁愿选择无悔,不管来生多么美丽,我不愿失 去今生对你的记忆,我不求天长地久的美景,我只要生生世世的轮 回里有你。
66、节制使快乐增加并使享受加强。 ——德 谟克利 特 67、今天应做的事没有做,明天再早也 是耽误 了。——裴斯 泰洛齐 68、决定一个人的一生,以及整个命运 的,只受休息之乐。——拉布 克 70、浪费时间是一桩大罪过。——卢梭
柯马培训PPTPDL2 Program v1.1

Robotics Advance Training 机器人培训(提高篇)Data RepresentationData Type/数据类型Declarations/声明Expressions/表达式Assignment Statement/赋值语句Typecasting/类型转换Data Type/数据类型Data Type List:1.INTEGER8.POSITION2.REAL9.JOINTPOS3.BOOLEAN10.XTNDPOS4.STRING11.NODE5.ARRAY12. SEMAPHORE6.RECORD7.VECTOR•INTEGER / 整数值范围:-2147483647 ~ +2147483647PDL2中可进行的运算:算术运算(+, -, *, /, DIV, MOD, **, +=, -=)比较运算(<, >, =, <>, <=, >=)位运算(AND,OR,XOR,NOT,SHR,SHL,ROR,ROL)•REAL / 实数值范围:-3.4E+38 ~ -1.18E-38,1.18E-38 ~ 3.4E+38PDL2可进行的运算:算术运算(+, -, *, /, **)比较运算(<, >, =, <>, <=, >=)•BOOLEAN / 布尔值值:TRUE(ON) / FALSE(OFF)PDL2可进行的运算:比较运算(=, <>)布尔运算(AND, OR, XOR, NOT)•STRING / 字符串属性:ASCII 或UNICODE字符串长度:最大2048 BytesASCII Value:‘ASCII code 126 is a tilde: \126‘UNICODE:“UNICODE 8A89 is \u0x8A89” (用双引号)Data Type/数据类型•ARRAY / 数组维数:一维或者二维每一维最大的容量:65535Note:最大值受到系统可用内存的限制Data Type/数据类型•RECORD / NODERECORD/NODE:多个数据项组合而成的结构体类型:except SEMAPHORE, RECORD, NODE, PATH区别::区别NODE包括用户定义的域,还包括系统预定义的域RECORD只包含用户自定义的域定义::定义RECORD和NODE都是在程序的TYPE SECTION定义的新定义的RECORD和NODE可以用来定义变量和参数定义方法如下::定义方法如下Data Type/数据类型•VECTOR / 矢量包括大小和方向VECTOR操作时可以用系统预定义的field变量:X,Y,ZData Type/数据类型Euler Angle of Rotation/转动示例Data Type/数据类型•JOINTPOS角度表示))机器人各关节位置((角度表示JOINTPOS 代表:机器人各关节位置NOTE:JOINTPOS变量是和一个指定的ARM绑定的不能被其他的ARM使用•XTNDPOSXTNDPOS用途:机器人本体和外部轴组成一个整体的情况XTNDPOS变量信息是和特定的ARM绑定XTNDPOS 数据组成:机器人的笛卡尔坐标,外部轴的信息•SEMAPHORE用途:防止多个程序同时使用同一个资源语句:WAIT Statement, SIGNAL StatementDeclaration/声明•CONSTANT /常量声明•常量声明是在程序的CONST Section中声明•PDL2提供了常用的预定义常量,这些常量在PredefinedConstants Lists中可以查找•TYPE声明•用于定义RECORD和NODE•详细见Data Type中RECORD和NODE章节•VARIABLE/变量变量声明声明•变量声明是在程序的VAR Section中声明•变量声明时变量可以具有如下属性:•exported from and global•initial value•NOSAVE•CONST•NODATAShared variables, routines•EXPORTED FROM•语法语法::EXPORTED FROMprog_name/routines•GLOBAL AND IMPORT•语法语法::variable_name GLOBALroutine_name EXPORTED FROM progr_name GLOBAL示例:PROGRAM aIMPORT ‘b ‘ VARx : INTEGER GLOBALary : ARRAY [5] OF REAL GLOBALROUTINE rout (x :REAL) EXPORTED FROM a GLOBAL BEGIN END rout BEGIN ENDaExpressions/表达式•Expressions /表达式Arithmetic operations/算术运算运算符:+, -, *, DIV, /, MOD, **, +=, -=Relational operations/比较运算运算符:<, >, =, <=, >=, <>Logical operations/逻辑运算运算符:AND, OR, XOR, NOTBitwise operations/位运算运算符:AND, OR, XOR, NOTROR, ROL, SHR, SHLVECTOR operations /矢量运算运算符:#, @Position operations运算符:(:)•运算符优先级Data Representation练习(一)编写多个简单的程序,主要包括:1. 变量定义,结构和关键字2. 常量定义,注意赋值方法3. 变量赋值,不同变量在赋值的注意点Motion ControlMOVE StatementsStopping and Restarting motions ATTACH and DETACH Statements HAND StatementsMOVE Statements/移动语句•MOVE Statement主要指通过机器人的臂、运动轨迹、目标位置、可选择项、连续运动等选项控制机器人的运动语法:MOVE <arm_clause> <traj_clause> dest_clause<opt_clauses> <sync_clause>arm_clause:机器人臂•可选择相应的机器人臂ARM[1],ARM[2]……traj_clause:轨迹选择•可选轨迹:关节、直线、圆弧dest_clause:目标位置•多种move类型,move to/ move near/ move awayopt_clause:可选择项•ADVANCE、TIL、WITH语句sync_clause:同步运动•当机器人多臂同步运动,用SYNCMOVE语句MOVE Statements/移动语句•MOVE TO:移到目标点MOVE TO destination•MOVE NEAR:沿工具坐标系法向量靠近当前点MOVE NEAR destination BY 250•MOVE AWAY:沿工具坐标系法向量远离当前点MOVE AWAY 250如右图•MOVE RELATIVE在相应的坐标相应的坐标系系中沿着指定的向量移动一定距离MOVE LINEAR RELATIVE VEC(100,0,100) IN TOOL如右图MOVE Statements/移动语句•MOVE FOR工具旋转的角度和移动的距离成比例正数沿着目标点移动,负数沿着目标点反方向移动 MOVE FOR 100 TO destination如右图•MOVE ABOUT在相应的坐标系中沿着向量转动一定角度 MOVE ABOUT VEC(0,100,0) BY 90IN TOOL如右图MOVE Statements/移动语句•TIL Clause当达到一定条件,motion 将被取消MOVE TO slot TIL $DIN[1]+ DIN[1]变成高电平,运动被取消以下条件语句可以使用:AT VIATIME n AFTER START TIME n BEFORE ENDDISTANCE n AFTER START DISTANCE n BEFORE END DISTANCE n AFTER VIA DISTANCE n BEFORE VIA PERCENT n AFTER START PERCENT n BEFORE END Digital pots例子:MOVE TO slot TIL $DIN[1]+MOVE TO perch TIL TIME 1000 AFTER START MOVE TO perch TIL DISTANCE 100 BEFORE END MOVE TO perch TIL PERCENT 20 BEFORE END•ADVANCE Clause当程序有ADVANCE ,运动插值和程序编译同时进行 MOVEFLY 语句必须要有ADVANCE例子:MOVE TO pnt0001p MyRoutine1()--机器人运动到01点后执行MyRoutine1MOVE TO pnt0002p ADVANCE MyRoutine2()--机器人向02点运动的同时执行MyRoutine2MOVE TO pnt0003pMOVE Statements/移动语句•WITH ClauseMotion 过程中,可以通过with 语句给预定义变量赋值或者使能一些条件句柄With 语句只对当前MOVE Statement 有效,对其他的MOVE Statemet 无效当WITH 语句重启一行,下一行必须使用WITH ,且MOVE 语句要加ENDMOVE 例子:MOVE TO p1 WITH $PROG_SPD_OVR = 50 MOVE TO p1 WITH CONDITION[1]MOVE TO p1 WITH $PROG_SPD_OVR= 50, CONDITION[1]MOVE TO p1 WITH $PROG_SPD_OVR = 50,WITHCONDITION[1], CONDITION[2], CONDITION[3],WITH $TOOL = drive_tool, WITH $MOVE_TYPE = LINEAR ENDMOVE预定义变量如右图->1. 速度/加速度:$ARM_ACC_OVR , $ARM_DEC_OVR$ARM_SPD_OVR , $JNT_OVR$PROG_ACC_OVR, $PROG_DEC_OVR , $PROG_SPD_OVR , $ROT_SPD $SPD_OPT , $LIN_SPD 2. 碰撞检测:$COLL_SOFT_PER , $ARM_SENSITIVITY$COLL_TYPE 3. 坐标系:$BASE , $TOOL , $UFRAME , $TOOL_RMT $TOOL_CNTR , $TOOL_FRICTION , $TOOL_INERTIA , $TOOL_MASS 4. 配置:$CNFG_CARE , $JNT_MTURN ,$SING_CARE , $TURN_CARE , $ARM_LINKED5. 连续运动:$FLY_DIST, $FLY_PER , $FLY_TRAJ$FLY_TYPE , $STRESS_PER 6. 精度控制:$TERM_TYPE , TOL_COARSE ,$TOL_FINE 7. 轨迹控制:$MOVE_TYPE8. 功能/应用:$SENSOR_ENBL, $SENSOR_TIME ,$SENSOR_TYPE , $WEAVE_NUM $WEAVE_TYPE , $WV_AMP_PER 9. 其它:$AUX_OFST , $PARStop and Restart motions•CANCEL MOTION Statement•运动一旦被取消,将不能再恢复•CANCEL CURRENT /CURRENT SEGMENT•CANCEL CURRENT•CANCEL CURRENT SEGMENT•CANCEL CURRENT FOR ARM[1], ARM[2] •CANCEL CURRENT SEGMENT FOR ARM[3] •CANCEL CURRENT FOR ALL•CANCEL CURRENT SEGMENT FOR ALL•CANCEL ALL /ALL SEGMENT•CANCEL ALL•CANCEL ALL SEGMENT•CANCEL ALL FOR ARM[1], ARM[2] •CANCEL ALL SEGMENT FOR ARM[3] •CANCEL ALL FOR ALL•CANCEL ALL SEGMENT FOR ALL•LOCK, UNLOCK, RESUME Statement•LOCK, LOCK ARM[1], LOCK ALL•被LOCK 的运动可以恢复,使用UNLOCK+RESUME 组合•例子例子::--This program is to show how to use LOCK--File :motion_2PROGRAM motion_2VAR p1, p2: POSITION BEGIN CYCLEIF $DIN[1]=ON THENLOCKELSEUNLOCK RESUMEENDIFMOVE TO p1MOVEFLY TO p2 ADVANCEEND motion_2HOLD, ATTACH, DETACH•HOLD Statement•HOLD 的用法和示教器上HOLD 是一样的•恢复HOLD 语句,需要按TP 上的START例子:--This program is to show how to use HOLD --File: motion_3PROGRAM motion_3VARp1, p2, p3 : POSITION BEGINMOVE TO p1IF $DIN[1]=ON THENHOLD ELSEMOVE TO p2ENDIFMOVE TO p3END motion_3•ATTACH and DETACH Statement•当多个程序使用同一设备时,ATTACH 和DETACH 可以控制能使用该设备的程序,常见的设备有ARM•Notes:1.当attached arm 用于另一个程序或正在执行动作,机器人会报错2.程序默认的是attach prog_arm•HAND Statement•机器人法兰上的工具能够通过HAND Statement 控制•每个机械臂最多能够有两个HAND•HAND Statement 使用的前提:机器人必须通过HAND 配置软件的配置,才可以使用HAND Statement 语句•HAND 的控制是通过IO 信号Data Representation练习(二)编写简单的程序,程序主要包括:1. Move statement2. Stop and restart statement3. ATTACH and DETACHExecution ControlFlow ControlProgram ControlProgram SynchronizationProgram SchedulingFlow Control/流控制•Flow Control/流控制语句•主要用于控制程序执行的流程,包括IF, SELECT, FOR,WHILE, REPEAT, GOTO•IF Statement/IF 选择语句•IF 选择语选择语句执行流句执行流句执行流程图程图程图::Flow Control/流控制•SELECT Statement/程序判断选择语句•SELECT 选择语选择语句执行流句执行流句执行流程图程图程图::Flow Control/流控制•FOR Statement/FOR循环语句•不建议在FOR语句中使用GOTO语句•FOR循环语句执行流循环语句执行流程图程图::程图Flow Control/流控制•WHILE Statement/WHILE循环语句•WHILE语句的应用和FOR语句类似•WHILE循环语句执行流环语句执行流程图程图::程图Flow Control/流控制•REPEAT Statement/REPEAT循环语句•REPEAT和WHILE、FOR一样都是循环语句•REPEAT循环语句执行流程图循环语句执行流程图::Flow Control/流控制•GOTO Statement/GOTO循环语句•GOTO无条件跳转语句•禁止使用GOTO语句跳转进入或跳出FOR循环•GOTO循环语句执行流程图循环语句执行流程图::Program Control/程序控制•Program Control/程序控制语句•程序属性(Program Attribute):•holdable(默认):通过START/HOLD控制•non-holdable:用于过程控制程序•holdable和non-holdable在PROGRAM声明中定义•程序状态(Program State):•running: 程序正在执行•paused: 程序被暂停,PAUSE statement•ready: 程序已就绪,需要按START开始执行程序•paused-ready: 程序已就绪,但被暂停了。
加工中心培训okuma课堂PPT
F=40~60
Φ5 S=1000 F=100~150
Φ4 S=1200 F=120~180
根据钻头的材质和上产地,转速可以上下浮动
10
刀具进给速度F和转速S的换算
铰刀
Φ14 S=200
F=20
Φ12 S=200~300 F=20~30
Φ10 S=300
F=30
Φ8 S=300~400 F=30~40
29 CALL O10
M63 G0X0Y0S1200 G56Z150.HA M3 M8 CALL 01 G0Z0 CALL O4 G0 Z10 CALL 02 G0 Z0 CALL 04 G0 Z10
30 CALL O10
M30 O1 X-11.Y-16 RTS O2 X11.Y-16 RTS O3 G91Z-1.F50 G41G01X3.D1F150 Y32. G03X-6.R3 G01Y-32.
距离的计算:用角度和相似三角形算出点的坐 标
程序的编程:用简单的代码写出好的程序
13
简单的锥面的加工
T2=$10ROUGHING(超硬铣刀) 代码如下:
T2M6 G15H1 G0X85.Y-15.S1200 G1Z-20.F200 G41G1X75.26.D3F50 X70.Y-16. G40 X80.Y-10. M30 D3:3
M8 S=400
F=500 P=1.25
M6 S=400
F=400 P=1
M5 S=400
F=320 P=0.8
M4 S=400
F=280 P=0.7
M3 S=400
F=200 P=0.5
这里的转速可以上下浮动,根据丝锥的质量和生产厂家
12
实例教程1-锥面加工
《数控原理》PPT幻灯片PPT
No 武汉软件工程职业学院
Image
3、光栅检测装置的的应用
根据上述莫尔条纹的特性,在莫尔条纹移动的方向上开设4个观察窗口A, B,C,D,且使这4个窗口两两相距1/4莫尔条纹宽度,即W/4,由上述讨 论可知,当两光栅尺相对移动时,莫尔条纹随之移动,从4个观察窗口A,B, C,D可以得到4个在相位上依次超前或滞后(取决于两光栅尺相对移动的方 向)1/4周期(即π/2)的近似于余弦函数的光强度变化过程,用LA、LB、LC、 LD表示,见图3-4(c)。若采用光敏元件来检测,光敏元件把透过观察窗口的 光强度变化LA、LB、LC、LD转换成相应的电压信号,设为VA、VB、VC、VD。 根据这4个电压信号,可以检测出光栅尺的相对移动。
(2)绝对式测量
绝对式检测中,被测量的任何一点的位置都由一个固定的测量基准 (即坐标原点)算起,每一测量点都有一个相对原点的绝对测量值。这样 就避免了增量式检测方式的缺点,但其结构较为复杂。
《数控原理与数控系统》
No 武汉软件工程职业学院
Image
3.2光栅
光栅有物理光栅和和计量光栅之分。物理光栅的刻线细而密,栅距 (两刻线间的距离)在0.002~0.005mm之间,通常用于光谱分析和光波波 长的测定。计量光栅相对来说刻线较粗,栅距在0.004~0.25之间,常用于 数字检测系统,用来检测高精度的直线位移和角位移。本章所讨论的光栅 系指计量光栅。计量光栅具有测量精度高、响应速度快、量程宽等特点, 所以在高精度的数控机床上,常使用光栅作为反馈检测元件,以实现闭环 位置控制。
图3-1所示为光栅尺的示意图, 标尺光栅和指示光栅上均匀刻有 很多线纹,这些线纹相互平行, 黑色为不透光线纹(宽度a),白 色为透光条纹(宽度b),栅距 (d)为黑白线纹宽度之和,即 d=a+b,通常情况下,a=b。安装 光栅尺时,要严格保证标尺光栅 和指示光栅的平行度以及两者之 间的间隙(一般取0.05mm或0.1mm) 要求。
元胞自动机ppt课件
格子气自动机
格子气自动机 (Lattice一Gas Automata,LGA又称 格气机),是元胞自动机在流体力学与统计物理中 的具体化,也是元胞自动机在科学研究领域成功 应用的范例 (李才伟,1997)。相对于“生命游戏” 来说,格子气自动机是个更注重于模型的实用性。 它利用元胞自动机的动态特征,来模拟流体粒子 的运动。
4元胞自动机的构成
元胞自动机最基本的组成元胞、元胞空间、 邻居及规则四部分
1.元胞
元胞又可称为单元,或基元,是元胞自动机的 最基本的组成部分。
元胞分布在离散的一维、二维或多维欧几里 德空间的晶格点上。
2.状态
状态可以是{0,1}的二进制形式,或是 {s0,s1,… …si……sk} 整数形式的离散集,严格 意义上,元胞自动机的元胞只能有一个状态 变量。但在实际应用中,往往将其进行了扩 展。例如每个元胞可以拥有多个状态变量,李 才伟(1997)在其博士论文工作中,就设计实 现了这样一种称之为“多元随机元胞自动机” 模型,并且定义了元胞空间的邻居(Neighbor) 关系。由于邻居关系,每个元胞有有限个元 胞作为它的邻居。
由于元胞自动机的应用并不局限于微观体系, 所 以它为在微结构模拟中实现不同空间及时间尺度的 方法之间的跨越,提供了一个非常方便的数值工具。
ATM机的人机工程学分析及设计ppt课件

精选版课件ppt
11
人机界面设计
man-machine interface design
3、磁卡读写器, 日志/ 票据打印, 出钞模块。这几个装置出口设 计光滑, 大小适中、配有相应的感应装置, 避免了不法分子在里面 做手脚。存款箱、现钞箱、废钞箱。针对ATM 机吐出假钞的现象, 加大了装置的防伪及残纸币的能力。
精选版课件ppt
14
1、ATM机布局合理。在流动人口大、繁华区域, 安装 ATM机的数 量相对多些, 缓解了取款高峰期。ATM 机的质量为600- 700 kg, 安装在楼层时, 确认了楼层的承载能力; 还充分考虑了电力供
应、通讯条件、持卡人取款时的安全性和维护的便利。避免了 在偏僻地方安装银行取款机, 犯罪分子有机会在其上做手脚或
16
显示器分析
analysis display
在人视线下30º区域为最好观察区,其中15º最佳。可以确定显 示屏与铅垂线夹角为15º。 高度:人一般操作视距范围在38~76cm之 间,其中最佳为56cm。 显示屏中心高度为立姿眼高第五十百分位减
去视距*sin15º加上鞋高修正量: 1560-560*sin15º+25=1453mm
精选版课件ppt
12
三、ATM安全防护设计
安全防护有两方面内容: 一方面是采取措施, 避免操作错误, 对机器进行防护。操作错误可能来自外界或内部的某些干扰而 产生的误动作, 也可能是由于操作者本身的错误行为而引起的 操作错误。目前, 大型机电一体化设备一般具备自诊断功能。 一旦发生故障, 能快捷地检测故障, 判断原因, 准确定位故障 点。另一方面是对操作者人身安全的保护, 人身防护的安全技 术很多, 报警系统、防护罩、挡板、绝缘外壳、噪声隔绝装置 的采用都是切实可行的。
KOMAX自动机PPT幻灯片

G333
ALP433
CC60
KOMAX
KOMAX
SCHLEUNIGER
9
1
1
60mm-10000mm
60mm-65m
60mm-65m
+/-1 毫米或<0.2 % , 取决于 +/-1 毫米或<0.2 % , 取决于 +/-1 毫米或<0.2 % , 取决
导线长度
导线长度
于导线长度
长度测量
用编码器
用编码器
cutter downtime rate
year
3.00% 2.50% 2.00% 1.50% 1.00% 0.50% 0.00%
Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec
monthly
2006 2007
6
功能列表
7
技术数据/性能范围
8
安全标志 !
开关
30
线爪1压力计
线爪2压力计
送线轮气缸压力计
送线轮调压阀
线爪1调压阀
线爪2调压阀
31
基本操作(开机)
打开总电源:正常情况下, 电脑自动启动
输入用户名和指令
按启动按钮
32
按重设
33
关机
不能直 接关电 源开关
点击圈点键出现此介 面.选择关机,确认 退出TOWIN后关
电源.
34
菜单功能(配置)
3
切线机分类
• KOMAX 40T切线机 • KOMAX G333切线机 • KOMAX 433 切线机 • schleuniger CC60 切线机
4
型号 生产厂商 现有数量 加工长度范围
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1侧旋转/拉脱装置工作过程
切线机操作指南--
(G333 G433型)
编制:刘庆勇
1
切线机培训
目的:操作工和维修人员充分了解和正确 使用设备
2
切线机培训
• 切线机结构介绍 • 切线、剥皮、压接动作讲解 • 切线机操作软件使用介绍 • 切线机日常保养和定期保养介绍 • 软件高级用户使用介绍 • 切线机常见故障排除方法
注:前4点适用于生产操作工培训;最后2点仅适用于维 修工培训
压接机)
压接机)
压接机)
机)
配 106送线装置 备 压接装置 装 置 穿密封塞装置
端子压接监控器 防错 密封塞监控
出错切断功能 操作系统 压接装置
缺陷 剥皮
备件通用性
推荐购买机型
无
有
有(2台)
有(2台)
无
有(OES CFM,SLC PS) 无穿塞装置
1台有此功能,2台无此功能 DOS下操作系统,功能少 不能调整压接速度,压接台固 定方式有缺陷造成工作台晃 动,监控器易误报警且压接控 制板易坏 对不同线径需操作工手工更换 剥皮刀和导向刀,换刀时间较 长 多数为KOMAX专有备件
全伺服控制
全伺服控制
设 剥离长度
备 技 加工导线截面
术 送线速度
参 数
进线电源
压缩空气气源
在1 侧,0.1mm-13mm 在2 侧,0.1mm-13mm 0.14 -6.0 平方毫米 (AWG 26- AWG 10) max 6m/s
3*380VAC,50Hz,1.5KVA
5-8bar
在1 侧,0.1mm-15mm 在2 侧, 在1 侧,0.1mm-15mm 在2 侧, 在1 侧,0.1mm-18mm 在2
3*380VAC,50Hz,16A
4-6bar
5-6bar
6bar
噪声水平/空气消耗 小于77 分贝( 不包括压具) 小于75 分贝( 不包括压具) 小于75 分贝( 不包括压具)
量
6.5 m3/h ( 不包括附件) 6.5 m3/h ( 不包括附件) 9m3/h ( 不包括附件)
重量
650 公斤( 包括两台mci 711 1030 公斤( 包括两台mci 711 1250公斤( 包括两台mci 711 850公斤( 包括两台压接
cutter downtime rate
year
3.00% 2.50% 2.00% 1.50% 1.00% 0.50% 0.00%
Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec
monthly
2006 2007
6
功能列表
7
技术数据/性能范围
8
安全标志 !
标尺旋钮
校直机构
偏心翼形螺丝钉
一般垂直机 构比水平机 构压得紧
防
结 盘
垂直校直机构
校直轮
水平校直机构
14
送线机构
送线同步驱动轮
1 2
3
4 56
9 78
10 11
12
G333型
1 3 4:
驱动轮
2 6:
止紧螺丝
5:
编码轮
7:
送线安全罩
8:
调节螺杆(轮1和3)
9:
调节螺杆(轮4和5)
10:
送线按钮(在送线状态
有(schleuniger自带)
有(KOMAX自带)
有(schleuniger自带)
均由此功能
均由此功能
无(WINDOWS XP)
无(WINDOWS2000),
能调整压接速度,且压接控制板 能调整压接速度,压接控制
易坏
板至今未坏过
对不同线径不需更换剥皮刀,无 对不同线径不需更换剥皮
换刀时间
刀,无换刀时间
有(K-13为PAWO密封塞装 置,其余为KOMAX) 有(KOMAX自带) 有(KOMAX自带) 均由此功能 无(WINDOWS2000)
能调整压接速度,且压接控制 板易坏
对不同线径不需更换剥皮刀, 无换刀时间
多数为KOMAX专有备件
有 有(2台)
有 有(2台)
有(KOMAX)
有(PAWO)
有(KOMAX自带)
3
切线机分类
• KOMAX 40T切线机 • KOMAX G333切线机 • KOMAX 433 切线机 • schleuniger CC60 切线机
4
型号 生产厂商 现有数量 加工长度范围
长度准确度
40T KOMAX
4 40mm-1500mm +/-1 毫米或<0.2 % , 取决 于导线长度
下此按钮,线送入)
11:
压力表(显示驱动轮之
间的气压)
12:
调节阀(调节轮1 4和轮
3 5的气压)
提示:每次调
整后应把安全 罩关闭到位
15
机械手
旋转盘
滑动机构 拉拔传感器
旋转皮带
皮带张紧螺钉
旋转传动轮
电机固定螺丝(四颗)
16
导线管
抱线夹
导向头
17
拉拔传感器 气管
气缸 线爪
压接传感器
线爪传感器
18
0.1mm-15mm
0.1mm-15mm
侧,0.1mm-18mm
0.125 -5.0 平方毫米 (AWG 26- AWG 10)
0.2 到6.0 平方毫米
0.15 到6.0 平方毫米
max 12m/s
3*380VAC,50Hz,25A
3*380VAC,50Hz,10KVA
G333
ALP433
CC60
KOMAX
KOMAX
SCHLEUNIGER
9
1
1
60mm-10000mm
60mm-65m
60mm-65m
+/-1 毫米或<0.2 % , 取决于 +/-1 毫米或<0.2 % , 取决于 +/-1 毫米或<0.2 % , 取决
导线长度
导线长度
于导线长度
长度测量
用编码器
用编码器
多数为KOMAX专有备件
基本备件为通用件,在市场
能购买到
5
V
cutter downtime rate 2006 2007
2006-2007维修停机率统计汇总
Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec 平均值 1.25% 1.59% 2.19% 1.88% 1.28% 1.48% 2.66% 2.51% 2.08% 1.63% 1.86% 1.55% 1.83% 1.50% 1.32% 2.02% 1.49% 2.06% 1.23% 1.04% 0.77% 1.23% 0.78% 0.86% 1.04% 1.28%
9
安全装置
主
紧 急
电 源 开
停
关
止
CC60型
紧
急
确
停
认
机
开
开
关
关
G433型
G333型
10
11
设备总装置/机构
辅助送线装置
1台压接装置
穿密封塞装置
校直机构
送线机构 1,2台机械手
2台压接装置
12
K106辅助送线机构
电源开关 送线轮 导线轮 防结开关 速度调整开关
理线杆 摆杆
压线轮 绕线轮
拉簧
13