推荐-直线驱动磁悬浮进给机构设计 精品
磁悬浮直线进给单元工作台模态分析

用户现场 的机床故障数据库 ,建立完善的可靠性保 障
制度 ,探 寻可靠性增长技术 ,从各个 方面切实有效地
采取提高产 品可靠性 的措施 。相信通过持续 不断的努
力 ,国产数控机床 的可 靠性定 能获得 大幅度 的提 高 , 为其在 日益加剧 的市场竞争 中增加关键筹码 。
关键外购件和故 障率较高 的外 购件应 重点检 查。 24 建 立早期 故 障试 验制 度 .
ig 18 , ( ) 4 9- 7 . n ,9 2 3 6 :4 4 3
总装前对其进行可靠性试验 ,确保刀库 系统 和主轴 系 统具备较高 的可靠性 。
( )电气柜在 总 装前 ,进行 公 路 颠簸 试 验 a s f eaitE# e i 4 H N E h sa Te tu o Rl l n nen ii K St i i b y  ̄g
第3 期
张凯 等 : 提高 卧式 加工中心可靠性的措施
・6 1 1・
评定结果对供 应商实施晋级 、降级或淘汰 。 ( )针对 故 障 率 较 高 的外 购 件 ( 检 测 开 关 、 2 如 电磁 阀、油管 、管 接头 、照 明灯等 ) ,对其供 应商 从
工艺装 备 、技术水 平及检测手段等方面逐一进行质量 认证 ,对 不具 备条件的供应商取消其配套关 系。 ( )对关 键外 购 件和故 障 率较 高 的外 购 件 供应 3 商进行 严格的质量监督 ,采购部 门与质量保 障部 门对 其 产品制定 详 细 的验 收标 准 、验 证方 法及 验 证 时 间
目前 ,某些卧式加工 中心可靠性水平偏低 的原因 之一是未能有效地排 除早期故 障H 。欲提高 卧式加 工 J 中心 的可靠性 ,除在机床设计 、制造 、采购方 面采取 有力措施外 ,在产 品出厂前必须进行严格 的早期故 障
电磁驱动磁悬浮进给机构研究
斥力 型系统虽结构简单 , 但控制精度低 , 难以满足高精
( ai io n nvrt,D i 10 8 C D lnJ t gU i sy aa l6 2 , HN) a ao ei l n
Ab ta t e g ei u p n in fe e rv n b lcrma n t m sb i . Sa g rn lcr ma n t a d sr c :A n w ma n t s s e so e d rd e y ee t c i o g ei i ul s t tg eig ee t o g es n
ma n t e sa h aa c a l o i o g ei r t e b l n e b e p s in。t e fe e e e ae o n y a s s e d n o rb tas e z t t h e d r n r t sn t l u p n i g p we u lo a r — g o c v r g p w r h c a r e t e ma n t a l o mo e,t u h e i n a d c n rlo h e d r o e n o e ,w i h c n d v h g e i tb e t v i i c h st e d s n o t ft e f e e g o
维普资讯
新产 品新技术 N dsdWc ls e『cnee0i Wol Tng PuaN hI 0 e
电磁驱动磁悬浮进给机构研究
葛研 军 李菊焕
( 大连交通大学, 辽宁 大连 16 2 ) 10 8 摘 要: 设计了一种新型电磁驱动磁悬浮进给机构 , 将电磁铁与导磁体静平衡位置交错 , 其不仅产生悬浮 使 力。 而且还可利用此交错位置产生的复原力为驱动力。 简化了结构设计与控制环节。分析了磁悬浮
基于混合控制的磁悬浮运转装置设计

0 引 言 混合 系 统【 】 1 是连 续 时间动 态和 离散 事件 动 态 . 2 等相互作用形成 的复杂系统 ,有强 的工程背景 。故 对 磁悬浮运转装置 ,运 用混合控制理论 ,用工控 计 算机对小车运行状态进 行混合控制 的软硬件 设计 。
文 章 编号 : 10 — 5 6 ( 0 6 1 -0 10 0 6 17 2 0 ) 2 0 6 — 2
2 0 , 12 , .1 0 6 Vo . 5 No 2
基 于 混合控 制 的磁 悬浮 运转 装置 设 计
王辉 鹏 ,李 坚强 ,裴 海 龙
( 华南理工大学 自动化科学与工程学院,广东 广州 5 04 ) 16 0 摘要:基于混合控 制的磁 悬浮运转装置 系统 ,将小车运动的连续动态行为和工控机的离散控制行为集于统一混 合模型中,采用分层框 架控制结构,通过工控机控制小车运行状态。系统运行时,工控机接收轨道上的光栅传感器 信号,并将其发送到驱 动装置中对应的直线 电机 ,通过变频器输 出电压与频率控制小车的运行状态。同时通过光栅 传感器可得出小车的运行速度 。由此 ,可全面了解 离散和连续行为的相互作用,实现更佳控制。
c ni u usa d d sr t e a irsi trc in a da he eab t rc n r 1 o t o n ic eeb h v o ’ n ea t , n c iv et o to . n o e
Ke wo d : b i y tm; a n tclv tt u n n q i me t Co t u u e a ir Dice ec nr l y r s Hy rds se M g e i e iaer n i ge u p n ; n n o sb h vo ; s r t o to i
磁悬浮轨道结构
磁悬浮轨道结构
磁悬浮轨道结构主要由轨道基础、导向系统、悬浮系统和牵引系统四个部分组成。
1.轨道基础:轨道基础是所有部件的基础,主要由混凝土和钢筋
网构成,承受着车辆和乘客的重量。
2.导向系统:通过导轨和导向磁铁等装置将车辆固定在轨道上下
行,保证了行驶的稳定性。
3.悬浮系统:悬浮系统包括悬浮磁体和控制系统,是实现车辆悬
浮的关键部分。
根据不同的悬浮方式,磁悬浮列车可分为常导电磁悬浮列车和超导电磁悬浮列车。
常导电磁悬浮列车采用直流励磁线圈产生磁场,通过改变电流大小来控制磁场强度,从而实现车辆的悬浮和导向。
超导电磁悬浮列车采用超导线圈产生磁场,通过改变线圈电流方向来控制磁场方向,从而实现车辆的悬浮和导向。
4.牵引系统:牵引系统通过磁场和电场的相互作用,产生推力,
使车辆前进。
根据不同的牵引方式,磁悬浮列车可分为同步直线电机牵引和异步直线电机牵引。
同步直线电机牵引采用直线同步电机产生磁场和感应电动势,通过控制磁场和电流来驱动车辆前进。
异步直线电机牵引采用异步电机产生磁场和感应电动势,通过控制磁场和电流来驱动车辆前进。
以上就是磁悬浮轨道结构的四大组成部分。
它具有高效、快速、安全、舒适、节能等优点,是一种先进的交通方式,未来有望成为城市交通的主流选择之一。
磁悬浮永磁直线电动机非脆弱鲁棒H∞控制器设计

芈:
=
( 4 斗 )
‘一 1 ( + )
( t ) P X( t ) ( X( t ) ) = ( t ) P X( t ) + ( t ) ( t )
=
X ( t ) [ P( A + B 2 K) + ( A + 2 K) P+
闭环 系 统稳定 , 并 且从 扰 动输 入 W到 被 调 输 出 的 闭
{ 【 M = c + D , “
“
( 5 )
v
=
引理 1 : 对 于任 意适 当维数 的矩 阵 , Ⅳ, E和 F
≤,的 F, 满足 下列 不等 式 :
推力 绕组 中通入 三相 对 称 的正 弦交 流 电流 , 采 用
对任 意 实数 I >0,
HF E +E F H ≤ o o - 1 H H + E E ( 6 )
力 表 达式 为 F = ( 1 )
引理 2 : 设 4、 、 y 、 F为 适 维矩 阵且 l I ,l l ≤1 , 如 存 在 > 0, 使得( I - e D D ) > 0, 则: ( A+X F Y ) ( A+X F Y ) <A ( ,一 D D ) A+
非脆 弱状 态反 馈器 为 : M =( K + A K) y r Y
( 7 )
( 8 )
磁悬 浮永 磁 直线 电 动机 的动 子 处 于悬 浮 状 态 , 与
其中 A K= MF N, F F≤,
则相 应 的闭环 系统 为
( 9 )
导轨 之 间无摩 擦 , 其 机械 运动 方 程为
D e s i g n a n d R e s e a 『 C h 设计与研究
互 独 立 的绕组 , 一 套 绕 组 是 用 于 产 生 电磁 推力 的 推力 绕组 , 另 一套 绕组 是 用于 调节 磁悬 浮力 的悬 浮绕 组 , 专 门用 于对 气 隙磁 场进 行调 节 , 从 而改 变磁 拉力 的大小 ,
磁悬浮永磁直线电动机悬浮系统模糊PID控制器的设计

直线驱动磁悬浮进给机构设计

作 者 简 介 :荆
丹 (9 6一) 女 , 族 , 林 长 春 人 , 春 工 业 大 学 讲 师 , 士 , 要 从 事 机 械 制 造 及 其 自 动 化 方 向 研 究 , - i 16 , 汉 吉 长 硕 主 E mal
j g a @ malc u . d . n i dn n i c teu c . .
J NG n, TAO a — i HAo h n — i I Da Xio we , C e g d
( h o f Me ha r n c Eng n e i g,Ch n c u Sc o lo c t o i i e rn a g h n Unie s t fTe h o o y,Ch n e u 3 0 2,Ch n ) v r iy o c n l g a g h n1 0 1 ia
产生 摩 擦 、 损 、 属 粉 尘 , 响 微 电子 产 品 的质 磨 金 影 量, 而且驱 动 件 的质 量 惯 性 和 连 接 间 隙 降 低 了设
种 新型 快 速进 给机 构 。它 取代 传统 的旋 转 电机
与滚珠 丝 杠驱 动方 式 , 将显 著 提高 产 品 的生产率 ,
改善加 工 环 境 。芯 片 的整 个 加 工 工 艺 过 程 从 划 片 、 片、 粘 金丝 球焊 到 封装过 程 中 , 除划 片外 , 其余
— — —
V ol No. _31 3
J n 2 1 u . 00
—
.
.
.
.
.
—
—
直线 驱 动 磁 悬 浮 进 给机 构设 计
荆 丹 , 陶 晓巍 , 郝 成 弟
( 春 工 业 大 学 机 电 工 程 学 院 , 林 长 春 1 0 1 ) 长 吉 3 0 2
“德国常导超高速磁浮列车的工作原理” 的信息化教学设计

第4期2019年8月No.4 August,2019信息化教学就是在信息化环境中,教育者与学习者借助现代教育媒体、教育信息资源和教育技术方法进行的双边活动。
信息化教学设计的发展趋势为职业院校教师与学生依据教学标准共同合作,从而设计出适合学生认知特点的学习路径与方法,为学生学习提供科学、有效、及时的支持与服务[1]。
“直线电机与磁浮驱动”课程是铁道机车车辆制造与维护专业基础领域的一门课程,是该专业学生的拓展必修课。
在传统的理论课堂中,教师更多实行“填鸭式”教学,这种满堂灌的方式极难调动学生的课堂参与性与整个学习思考过程的主动性,从而使学生对一节课的重点与难点很难把握,造成上课效果不佳的后果,因而,急需进行教学方法和教学手段的改进。
实施信息化教学对提升教学效果是一种有效的教学改进[2]。
本课题以西安铁路职业技术学院“直线电机与磁浮驱动”课程中“德国常导超高速磁浮列车的工作原理”这节课为例,进行信息化教学设计,以提升教学效果,同时为高职铁道机车类专业其他相关课程的信息化教学开展提供示范。
1 教学环境1.1 学生情况本次教学设计的教学对象是西安铁路职业技术学院机车车辆制造专业大二的学生,他们能够熟练使用计算机、手机等信息化设备与各种网络技术,是“95后”—信息化时代的原住民。
1.2 教材本门课程选用的教材是《直线电机与磁浮驱动》,该教材的主编是西安铁路职业技术学院省级名师李益民教授,由西南交通大学出版社出版。
这本教材也是全国首家介绍磁浮列车原理的高职教材。
笔者在对教材内容十分熟悉的基础上调研了西南交通大学磁浮技术,同时,对长沙磁浮快线进行了参观与学习,从而对磁浮技术有了较深的理解。
1.3 课程标准“磁悬浮与直线驱动”这门课程是铁道机车车辆制造与维护专业的拓展必修课,主要讲述磁悬浮与直线电机的发展及现状,并简要介绍磁悬浮与直线电机的结构与工作原理,在“磁悬浮与直线驱动”的课程标准中,德国常导超高速磁浮列车的工作原理占用2课时。
数控机床磁悬浮进给机构研究
直线电机进给系统
直线电机是一种能把电能直接转换成直线运动的 机械能,而不需要任何中间转换传动的驱动装置。
特点
优点:
(1)高速度 可达10020Om/min。 (2)高加速度 高达2一10g。 (3)定位精度高 由于采用闭 环控制,其理论定位精度可 以为零。实际最高定位精度可 达0.1—0.01μm。 (4)行程不受限制 由于直线 电机的次级(定子)可以一段一 段地铺在床身上,不论有多远, 对系统的刚度都不会产生影响。
在上电磁铁中产生控制电流 (增量 ) △l,使得上电磁铁中电流增加, 产生 吸力增加, 同时, 在下电磁铁中产生相反的控制电流 (增量 ) △l, 使得下 电磁线圈中的电流按相同幅度减小, 其吸力相应地等幅减小, 最终使得工作 台回到稳定悬浮的位置上。同理, 当工作台在水平方向上发生偏移时, 通过 水平位移传感器的反馈与控制作用对工作台形成精确的导向。直线电机动子 9安装在工作台的中心线上, 直线电动机定子10安装在与动 子对应部位的支承导轨3上,在 直线电动机定子和动子外侧设 置隔磁罩11。在工作台完成稳 定悬浮与精确导向后, 直线电 动机通电, 动子带动工作台实 现直线运动。
数控机床磁悬浮进给系统
♦ 将直线电动机与磁悬浮支承技术相结合的直接驱动型磁悬
浮直线进给单元应用于机床, 可满足现代机床加工高速化、 精密化的要求。
♦ 与传统的机床进给系统相比,具有
“零传动”、无机械摩擦、 无接触磨损、无需润滑、响应速度快、推力平稳、加减速过 程短、速度快、精度高、行程长度不受限制、运行噪声低、 机电效率高, 且磁悬浮支承系统中采用的主动控制技术, 可 以提高机床自身的信息处理能力, 实现在线检测和自动补偿, 从而进一步提高进给系统定位精度。
直线电机在磁浮交通系统中的应用

直线电机在磁浮交通系统中的应用摘要:本文首先介绍了发展磁浮交通系统的必要性,深入分析了直线电机的工作原理及独特优势,进而阐述了直线感应电机、常导直线同步电机在轮轨车辆、中低速磁浮及高速磁浮中的应用。
最后以直线电机应用于TR08型高速磁浮车为例,介绍其应用领域关键问题及技术。
关键词:直线电机;磁浮列车;TR08引言:随我国经济社会的快速发展,城镇之间的依赖关系进一步加强,城镇之间的互联互通建设作用愈发明显。
鉴于目前我国轨道交通运行现状,发展更高速度等级的轨道交通运输方式已成为推动社会发展的必然选择[1]。
目前,我国已掌握高速客运装备关键技术,已研制出多种型号,速度等级涵盖200kM/h~400 kM/h的各种型号的动车组产品,若需要进一步提高列车的速度等级,轮轨车辆已不再成为最佳选择方案[2]。
磁浮交通系统作为一种新型轨道交通发展模式,除具有较高的运行速度外,还具有能耗低、启动快及对环境影响小等优点,具有较好的发展前景[3]。
截止目前,我国的高速铁路通车里程已达到2.5万公里,“八纵八横”铁路网规划开始进入收尾阶段。
未来,磁浮交通系统将会成为轨道交通系统主流发展方向。
直线电机作为磁浮列车的牵引机构,其研究已成为发展磁浮交通的关键技术之一,探讨其在轨道交通中也显得尤为重要。
目前,随着社会经济的快速发展,直线电机的研发与应用显得愈发迫切。
本文将介绍直线感应电机及直线同步电机在高速磁浮系统中的应用。
1直线电机的工作原理及优势分析1.1原理直线电机的工作原理与传统旋转电机类似,可以将其看作由旋转电机沿半径方向切开展平得来,旋转电机的定子对应于直线电机的初级,旋转电机的转子对应于直线电机的次级。
较之于旋转电机气隙中的圆形旋转磁场,直线电机气隙磁场为行波磁场,旋转电机转子相对于定子产生旋转运动,而直线电机的次级则相对于直线电机的初级作直线运动。
通过改变通入定子绕组电流的大小、相位及频率,可达到改变气隙磁场同步转速的目的。
进给平台永磁直线磁悬浮电动机的电磁力特性研究

线磁 悬浮 电动机 的动 子上 有 两套绕 组 , 一套 绕组 用 于产 生 电磁 推 力 , 另一 套 绕组 用 于产 生 可控 的磁 悬浮 力 。采 用 Maw l应 力 张量 法推 出了电动 机 的 电磁 推 力和 悬浮 力 的数 学模 型 。用 A sf对 电磁 推 力和 xe l no t 磁 悬浮 力进 行 了有 限元 分析 , 明 了采 用永磁 直 线磁 悬浮 电动机 实现 直接驱 动和 无摩 擦进 给 的 可行性 。 证
lcr m a ei h s ,t t r i s d t n r t a e i e ia in f r e e to g tc t r t he o he s n u u e o g ea e m g tc lv t t o c .The ma h m a ia o e h e n o t e t lm d lof t e c m o o S ee to a e i h s nd lv tton f r ei e ie y t x els rs e s rme h d. ns f s t r’ lcr m g tc t r ta e ia i o c s d rv d b heM a w l te st n o t o A n u o ti us d f rf t lm e t a l i oft o o S lcr m a ei h s a d lviai n f r e e o ' e ee n nayss mi he m t r’ ee to g tc t r t n e t to o c .The fa iii n u e sb l y of t di c rv nd fito fe e d i e i e ih pe ra n a n t l a g e i e ia i n m o o . r td ie a c in- e f e s v rf d w t rn ne tm g e i r ma n tc lv tto e r r i ne t r K e o ds fe to m ;pe a e t m a e l a a e i e ia in m o o ;dr c d i e lcr m a e i y w r : e d pl f r a m r n n g t i r m g tc lv tto n ne n t r ie t rv ;ee to g tc n
直线电机驱动的磁悬浮平台推力动态解耦控制

直线电机驱动的磁悬浮平台推力动态解耦控制摘要:本文主要针对直线电机驱动的磁悬浮平台推力动态解耦控制进行分析,文章中设计采用一种逆系统方法对三角自由度磁悬浮平台解耦控制,在该方法进行动态解耦控制过程中,主要完成数学模型构建以及解耦控制计算等环节。
同时,本文为了研究磁悬浮平台推动力动态解耦控制方法,最后也对该方法实施的仿真模拟,确认该动态解耦控制方法的有效性。
关键词:直线电机驱动;磁悬浮凭条;推动动态解耦控制直线电机驱动的磁悬浮平台具有强耦合性、非线性的特点,所以在其控制过程中,动态和静态性受到的影响相对比较大。
因此,在磁悬浮平台控制研究过程中,针对性提出了动态解耦控制研究方向。
在该方法中首先需要构建超精密、微型磁悬浮平台的数字模型,并且采逆系统下的反馈算法完成解耦控制计算,最后得到反馈控制规律,从而实现动态解耦控制。
1.研究背景直线电机驱动的磁悬浮平台推动平台是利用半导体光刻技术、超精密加工技术以及微型纳米技术的磁悬浮运动平台,该平台运作的主要动力依靠三天直线伺服驱动装置。
因此,磁悬浮平台推力运作与三套直线伺服驱动装置有重要的关系。
因此,对磁悬浮平台推力控制,就能够保证平台运行良好。
但是,在实际的运作过程中,发现磁悬浮平台推动动态控制还存在问题。
如,动子负载不够对称,自由度和驱动装置之间也会产生刚性耦合,从而造成控制困难的问题。
因此,以上情况也造成了驱动装置各自由度耦合的问题。
因此,整个自动度研究的过程中,需要针对动态解耦进行分析。
而本文研究过程中,提出了推力动态解耦控制方法。
该控制方法在应用过程中,也开始应用反馈线性化方法,具有良好的控制效果。
2.三角自度磁悬浮平台的解耦控制方法本文在研究过程中,提出了三角自由度磁悬浮平台解耦控制方法,在整个解耦控制过程中,数学模型构建以及解耦控制计算分析过程中,以下是对该方法的具体分析研究。
(1)三角自由度磁悬浮平台模型构建驱动三角自由度平台的永磁直线电机装置的定子呈U型结构。
城轨车辆直线牵引电动机原理和案例分析
4)噪声低。直线电机电梯没有减速器、旋转 电机及液压油泵运转时所产生的噪音,也没有钢 丝绳和曳引轮之间摩擦所产生的噪声,而且钢丝 绳的寿命也会大大提高。
3、 结构与原理
(1)直线异步电动机结构 定子:带齿槽的电工钢片叠成,槽里嵌有绕组 转子:非磁性体(铜板或铝板)和磁性体(钢板)构成的复合金属板。
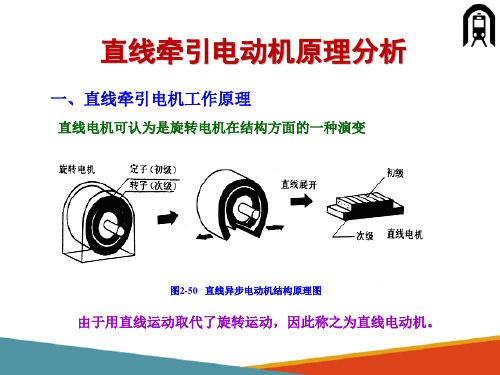
直线牵引电动机原理分析
一、直线牵引电机工作原理
直线电机可认为是旋转电机在结构方面的一种演变
图2-50 直线异步电动机结构原理图
由于用直线运动取代了旋转运动,因此称之为直线电动机。
1、直线电机特点:
(1) 无旋转部件,呈扁平形,可降低城轨车辆的高度。 (2) 能够非接触式的直接实现直线运行,因此可不受粘着的
3.4 用于长距离的直线传输装置
(1)运煤车
图3.27所示为直线电机运煤车示意图。矿井 运煤轨道一般很长,每隔一段距离,在轨道中间 安置一台直线感应电动机的初级。一列运煤车由 若干矿车组成,每台矽车的底部装有铝钢复合次 级。直线电机的初级依次通电,便可把运煤车向 前推进。
(2)新型电梯 图3.16所示的永磁式直线同步电动机矿井提
5、边缘效应
直线电机是长直、两端开断的结构,存在 始端和终端,引起了边缘效应(端部效应)。
① 静态纵向边缘效应 ② 动态纵向边缘效应 ③ 横向边缘效应
在气隙中出现脉振磁场 在横向的边缘区域磁场削弱, 和反向行波磁场,运行过程 造成空载气隙磁场横向分布的不 中将产生阻力和增大附加损 均匀,这是第一类横向边缘效应。 耗。这种效应当初、次级相 次级导体板对电流分布及气隙 对静止时也存在,因而称为 磁场密度沿横向分布的影响,称 静态纵向边缘效应,纵向即 为第二类图横2-向61直边线缘电机效行应波磁场 磁场移方向动上的的涡方流向分布。
优秀机械毕业设计二维步进单片机控制工作台机械系统设计(含全套cad图纸)

单片机控制的 X-Y 工作台系统可以设计为开环,半闭环和闭环伺服系统三种。本设计 采用开环伺服系统,通过单片机控制步进电动机的驱动,经传动机构动带动工作台的运动。 系统没有检测装置。机械结构设计首先根据工作台的最大载荷,选取导轨副,设计工作台, 然后进行结构设计,受力分析,转矩计算,画出工作台的装配草图,再选择步进电动机的 型号,进而设计选择滚珠丝杠,最后设计出 X-Y 工作台,画出其装配图。 关键词 工作台;步进电机;脉冲当量;步距角
2 方案原理的设计.......................................................................................................................... 6 2.1 总体方案的选择和说明........................................................................................................ 6 2.2 总体方案实现的系统组成框图............................................................................................ 7
III
徐州工程 学院毕业设计 (论文 )
目录
1 绪论.............................................................................................................................................. 1 1.1 课题研究的背景.................................................................................................................... 1 1.2 工作台的分类........................................................................................................................ 1 1.3 本设计工作台的作用和特点................................................................................................ 3 1.4 步进电机的发展现状............................................................................................................ 3 1.5 单片机的发展现状................................................................................................................ 5
磁悬浮电梯设计

垂直电梯机械系统设计班级:2012级机自07班**:***学号:********1.1摘要解释电梯机械系统基本结构和工作原理,进而对传动方案选择,确定减速器和牵引方式,根据设计要求计算驱动功率,选择驱动电机,确定减速器参数,对传动系统中各个部件进行受力分析,最后选择制动方式和制动力。
关键词:电梯、结构原理、功率、参数1.1AbstractExplain the basic constitution and operating principle of mechanical system which is in elevator. Then choose the rational transmission scheme to determine which are the most reasonable reducer and model of traction. Calculate the power of driving, select drive motor and determine the parameter of reducer in accordance with the design requirement. And then make force analysis of every part in the transmission system. Choose the rational brake method and braking force in the end.Key words: elevator; principle and constitution; power; parameter2.电梯机械系统基本结构与工作原理2.1电梯机械系统基本结构:电梯可分成电气系统与机械系统两大部分,电气系统主要是控制电梯的运行过程,相当于人的神经,而机械系统则是作用于电梯的传动、减速器、制动等,相当于人的躯体。
【国家自然科学基金】_直线伺服电机_基金支持热词逐年推荐_【万方软件创新助手】_20140801

53 54 55 56 57 58 59 60
2011年 科研热词 推荐指数 隐极式永磁直线同步电动机 2 永磁直线同步电机 2 动子附加高频绕组 2 麦克斯韦力 1 鲁棒控制 1 高频响应 1 预见控制功能 1 闭环观测器 1 钢丝绳 1 遗传算法 1 迟滞函数 1 轮廓误差 1 轮廓控制 1 趋近律 1 超声电机 1 误差补偿 1 自由曲面 1 线性矩阵不等式 1 精密控制 1 空心式永磁直线电机 1 磁通切换 1 磁路模型 1 磁悬浮 1 磁场 1 矢量控制 1 直线旋转永磁作动器 1 直线伺服驱动 1 直线伺服电机 1 直接驱动 1 电磁场分析 1 滑模控制 1 测试系统 1 永磁直线同步电动机 1 永磁电动机 1 永磁同步直线电机 1 横向边缘效应 1 无传感器 1 新型驱动机构 1 数控机床 1 故障分析 1 抖振 1 快速刀具伺服系统 1 并联运动装备 1 并联机构 1 导轨 1 定位精度 1 宏微进给系统 1 变增益交叉耦合控制 1 反电势 1 动子位置角 1 动子位置 1 功率角 1
科研热词 推荐指数 永磁同步直线电机 4 跟踪误差 3 直线电机 3 无模型自适应控制 3 数据驱动控制 3 鲁棒性 2 重复控制 2 精密运动控制 2 数字信号处理器 2 周期信号 2 鲁棒控制 1 驱动器 1 非圆车削 1 重复控制器 1 迭代学习控制 1 运动控制器 1 软件设计 1 超声电机 1 负载扰动补偿器 1 花型转换 1 自适应重复控制 1 自适应滑模控制 1 缺陷检测 1 精密工作台 1 精密定位 1 磁通切换型永磁直线电机 1 磁悬浮永磁直线电动机 1 矢量控制 1 直线直流电机 1 直线伺服系统 1 电磁弹射 1 电流环 1 电子凸轮 1 状态观测器 1 永磁直线同步电机 1 永磁同步直线电动机 1 死区补偿 1 横动补偿 1 横动提花 1 模糊控制 1 机械环 1 有限元方法 1 最优化 1 时变周期信号 1 无铁心永磁直线同步电机 1 无位置传感器控制 1 数控机床 1 数字控制 1 插入型重复控制器 1 推力特性 1 快速往复 1 工业以太网 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直线驱动磁悬浮进给机构设计第31卷第3期20XX年O6月长春工业大学学报(自然科学版) JournalofChangchunUniversityofTeehonology(Natural—S—cien—e—eEd...i...t.ion——)V ol_31No.3Jun.20XX直线驱动磁悬浮进给机构设计荆丹,陶晓巍,郝成弟(长春工业大学机电工程学院,吉林长春130012)摘要:采用直线同步电机对悬浮的平台进给机构提供驱动力,实现了进给机构在水平和垂直两方向的无接触支撑和导向.对磁悬浮力和直线电机推力进行了分析计算.关键词:磁悬浮;进给机构;直线同步电机;数字PID控制中图分类号:TH61.21文献标志码:A文章编号:1674—1374(20XX)03—0309—04 DesignofmagneticlevitationstagedrivenbylinearmotorJINGDan,TAOXiao—wei,HAoCheng—di (SchoolofMechatronicEngineering,ChangchunUniversityofTechnology,C hangehun130012,China)Abstract:Thelinearsynchronousmotorisappliedtocontroltheplatformwhich non-contactlymoves inboththehorizontalandverticaldirections.Themagneticforceandthrustingfo rceofthelinearmotorareanalyzedandcalculatedhere.Keywords:magneticsuspension;feeder;linearsynchronousmotor;digitalPID contro1.0引言微电子制造业是信息产业的核心和基础,其技术水平的高低已成为衡量一个国家微电子工业发展的重要标志.在微电子设备中,传统的进给方式是刚性接触支撑和”旋转电机+滚珠丝杠”驱动方式.这种进给方式存在着很大的弊病,不仅产生摩擦,磨损,金属粉尘,影响微电子产品的质量,而且驱动件的质量惯性和连接间隙降低了设备的定位精度和响应频率.文献[1—2]采用气浮进给定位方式,虽然消除了摩擦,但支撑刚度小, 承载能力和抗冲击能力降低,亦限制定位精度的提高,这就需要积极开展更适合微电子设备的进给定位技术的研发工作.文中提出了一种满足微电子设备超洁净加工环境需求和高精度,高效率加工需要的新型精密磁悬浮进给机构.1磁悬浮进给机构设计磁悬浮进给机构是针对微电子行业高精度的IC芯片加工和超洁净的加工环境而设计制造的一种新型快速进给机构.它取代传统的旋转电机与滚珠丝杠驱动方式,将显着提高产品的生产率, 改善加工环境.芯片的整个加工工艺过程从划片,粘片,金丝球焊到封装过程中,除划片外,其余工序均为无切屑超精加工.整个加工车间空气含尘指数控制极为严格,且配有专门的设施除尘,如风淋室.由于芯片尺寸很小,加工面积达到微米级甚至更小,有些灰尘的大小几乎超过了加工面收稿日期:20XX—03一O1作者简介:荆丹(1966一),女,汉族,吉林长春人,长春工业大学讲师,硕士,主要从事机械制造及其自动化方向研究,E-mailjingdan@.31O长春工业大学学报(自然科学版)第31卷积尺寸,如附着在加工表面将严重影响芯片的加工精度.为了避免常规的接触支撑式机械平台导致的摩擦,粉尘污染,动态响应迟钝和速度慢等缺点,并考虑到常规切削加工方法出现的漏磁粘屑现象,文中采用磁悬浮技术与直线驱动技术设计了适合于微电子领域无切屑精密,超精密加工的悬浮进给机构.此进给机构能实现在水平和垂直两方向的无接触支撑和无接触导向,具有无污染,响应快速,刚度高和精确定位等优点.1.1磁悬浮进给机构原理直线电机驱动最高速度为1~3m/s,因而能够满足快速进给的需要.磁悬浮系统可分为斥力型和吸力型两类.斥力型磁悬浮系统虽结构简单,但控制精度低,难以满足高精度加工需要.相比之下,吸力型反馈控制磁悬浮系统虽结构复杂,但其运动,定位精度易于控制,故采用稳定悬浮与直线驱动合二为一的常导磁吸型平台结构.其结构如图1所示.次级移动平台初级u形电磁铁线圈倒F形导轨图1磁悬浮进给机构原理将导轨固定,平台依靠与其装配成一体的U形电磁铁励磁线圈与倒F形导轨耦合作用而悬浮,即当线圈通电后在U型电磁铁中产生磁场, 该磁场感应导轨使之对平台产生一向上的磁吸力,当吸力与平台重力平衡时,平台便悬浮于空中.此时,由安装于平台下面的次级和导轨中间的初级组成的直线电机驱动平台沿导轨方向移动,这就是该平台进给机构的原理.考虑到平台运动过程中由于结构不对称导致磁力分布不均, 出现左右偏摆运动,产生运动误差和导向误差,将严重影响平台的定位精度,图示结构既满足悬浮需要又能实现自动导向.因为磁吸力始终集中在U型磁极与倒F形导轨相对的位置,一旦出现左右偏摆现象,平台会自动对中.1.2直线同步电机结构设计由于微电子产品加工设备加工方法的特殊性(即无切屑JJn-v_),无进给冲击力,振动小,无切削颤振现象,所以平台质量轻,惯性小,所需进给推力不大,正合乎直线同步电机使用需求.平台是进给系统的运动部件,其质量与进给系统的最大加速度成反比,那么,要提高进给系统的加速度就必须减轻平台的质量[3].文中采用高强度的轻质材料铝合金制作平台框架,U形电磁铁与框架采用螺钉联接,直线电机安装在平台与导轨之间(见图1),采用次级移动,初级固定的形式.次级固定在平台移动部件的下面,采用实心铁磁材料制作,初级绕组用叠片组成,以减小由交流激磁引起的涡流,横向通过的直流磁通不受叠片结构的影响.将直流激磁绕组和三相电枢绕组安装在U形铁芯上,以构成初级,再将整个初级结构安置在U形导轨中间的凹槽中.直线同步电机结构如图2所示.开槽的次级直流激磁绕组图2直线同步电机结构直线异步电机次级的转速始终达不到同步速度E53,否则电机中的气隙行波磁场就不会使次级产生电磁推力,不能实现直线运动.直线异步电机滑差率及次级运行速度为:一V—s--一VS(1)——一L1,V一(1一s)V(2)式中:s——滑差率;——次级运行速度,m/s;——电机同步运行速度,m/s.电机运行时,滑差率s在0与1之间,所以,/r<.但是,对于直线同步电机,次级运行速度等于电机同步速度(即—V),则滑差率S等于0,无法产生电磁推力.为此,采用沿运动方向开槽的次级形式解决第3期荆丹,等:直线驱动磁悬浮进给机构设计311 上述问题(见图2).设定开槽的次级结构的周期为2r(r为三相初级绕组的极距),在次级槽的凸,凹处有明显的磁极存在,这样造成初级和次级气隙分布不均匀,当初级绕组产生的磁势为正弦时,气隙磁密就不是正弦分布,除基波外还有一系列谐波,这些谐波会在次级产生推力,促使次级沿平行与初级的方向上作直线运动.同时,要想增大系统的推力,就必须减小运动部件的质量,为使直线电机推力满足进给系统的需要,可采用有限元分析和优化设计方法,求得所要求的动,静刚度条件下整个平台最轻的质量.1.3直线同步电机的推力和垂直力计算直线同步电机作为悬浮进给系统的推进装置,采用直流磁场激磁,电机产生的推力和垂直力通过计算电动机气隙磁场储存的能量来求得.直线同步电机的纵向视图如图3所示.次级●--—--?---2r_?____?___■●一2口—_I.‘‘II,上tI/g.\×x×,●,fU形铁芯初级图3直线同步电机纵向视图U形铁芯的一个芯柱下的气隙能量为:1rW=÷.2al[H()]g(x)dx(3)厶J式中:‰——空气磁导率;2a——铁芯宽度(U形铁芯一个芯柱的宽度);g(z)——沿运动方向在某一点上的气隙长(g(z)一是g(z),其中,g(z)为实际气隙长,k 为卡氏系数);H()——磁场强度.由交流和直流激磁产生的磁动势分布可以表示为:()一J.+Jsinf型4-)(4)\r,式中:——功率角;J.——总的直流磁势;.,——每极交流磁势的基波分量,且其表达式为:J一—34’2K—~WI1(5)丁c』DK——绕组分布系数;W——每相匝数;J——初级电流;.D——极数.g(z)的变化见图3,而)一(6)那么对于极数为2|0的直线电机来说,联立方程(3)~(6)求解,得:wUo[(a+)(+2+(1--)(丢c.s2sin2a+4CCOSsi№)](7)其中,口,r,g和g见图3.C:J0k=::—g—2glg1=是gg2一点g7c6求得,则推力和吸引力F可分别由下面两式求出:F一(罟),㈣F一(等)则对于U形铁芯的一个芯柱一.;(1一去)(sin23sin2a+4Csisina)(10)F一一”.}[(a+)(+2c)+(一)(专c.s2asin2a+4Cc.ssina)](1) 312长春工业大学学报(自然科学版)第31卷因为整个平台在运动过程中始终处于悬浮状态,前进过程中无阻力,则由推力F可求得直线电机次级沿运动方向运动的加速度:n一一Fx(12)式中:m——整个进给运动平台的总质量,它包括平台质量,u形电磁铁励磁线圈的质量和电机次级的质量三部分.由此可见,要想提高平台进给加(减)速度,就必须减小运动部件质量,增大系统的推力.在此机构研究中,主要通过选择合适型号的电机增大推力,以及采用结构优化设计来减小运动部件的质量.2磁悬浮平台进给机构的运动控制由于直线同步电机和进给机构之间无任何中间传动环节,此时平台负荷的变化,直线同步电机的”端部效应”及其产生的垂直吸力都是影响平台稳定悬浮与驱动的外界干扰因素.这些干扰因素无任何缓冲环节直接作用到直线伺服系统上,如参数调节不当,就会造成系统性能指标降低甚至导致系统失控而振荡.因此,必须采用全闭环控制才能满足进给系统需要.实际机构中,用涡流传感器检测悬浮系统的间隙,用光栅尺检测机构运动位移,采用数字PID控制系统来实现直线电机的伺服控制].此系统采用软件技术实现PID控制参数的智能化自动整定,并利用整定后的控制参数控制直线电机的运行过程,同时消除控制系统的稳态误差,使直线驱动系统能获得较高的响应速度,稳定的控制精度和良好的控制效果.3结语直线驱动技术在磁悬浮平台进给机构中的应用,可实现无超调定位,使系统调节质量和定位精度提高,且进给系统移动快速,定位时间短,显着提高了设备的生产率.悬浮平台无接触,无摩擦,无粉尘污染及移动快速等特点满足微电子产品加工过程中高效率,高精度和超洁净加工环境的需要.参考文献:E1]王先逵,陈定积,吴丹.机床进给系统用直线电动机综述口].制造技术与机床,20XX,8:18—20.E2]TsukamotoO,YasudaK,ChenJz.Anewmag—neticlevitationsystemwithACmagnets[J~.Trans—actionsonmagneticsofIEEE,1988,24(2):1497—1500.[3]夏红梅,张柏霖.直线电动机高速进给单元的关键技术EJ].制造技术与机床,20XX,7:22—24.E4]SA纳斯尔,I波尔达.直线电机[M].北京:科学出版社,1982.i-s3上海工业大学,上海电机厂.直线异步电动机[M]. 北京:机械工业出版社,1979.I]63陶永华,尹怡欣,葛芦生.新型PID控制及其应用EM].北京:机械工业出版社,1998.E7]李庆雷,王先逵.永磁交流同步直线电机位置伺服控制系统设计I-j].中国机械工程学报,20XX,5:577—581.[83韩连英,孙宝玉,梁淑卿,等.微电子领域磁悬浮进给机构设计[J].长春工业大学学报:自然科学版,20XX.24(1):65—88.。