现代控制理论--第三章 3 能观性
现代控制理论-线性控制系统的能控性与能观性例题精选全文完整版
如果线性定常系统: y Cx 是状态不完全能控的, 它的能控性判别矩阵的秩
rankM n1 n
则存在非奇异变换:x Rcxˆ
将状态空间描述变换为:
xˆ y
Aˆ xˆ Cˆ xˆ
Bˆ u
n1 n n1
其中:
xˆ
xˆ1
xˆ
2
n1
n n1
Aˆ
R c1AR c
Aˆ 11 0
3.6.1 线性系统的对偶关系
线性系统1、2如下:
1:yx 11
A1x1 C1x1
B1u1
2:
x 2 y 2
A2x2 C2x2
B2u2
如果满足如下关系
A2 A1T , B2 C1T , C2 B1T
则称两系统是互为对偶的.
u1(t) B
x1(t)
x1(t)
++
∫
y1(t) C
A
y2(t) BT
0
A 0 1 0 , b 0, c 1 1 1
1 4 3
1
解: 能控性矩阵
0 1 4
M b Ab A2b 0 0
0
1 3 8
rankM 2 n1 dim A n 3 不能控
构造变换矩阵
0 1 0 Rc 0 0 1
1 3 0
✓与前2个列向量 线性无关; ✓尽可能简单
结构分解
u
co
y
co
依据能控能观 性,将系统分解
co
为四个子系统
co
x Ax Bu
y Cx Du
特殊的线性变换
x xTco xTco xTco xTco
分解步骤:
1、将系统分解成能控与不能控子系统;
现代控制理论3 第三章 线性系统的可控性和可观测性

A'
0
0
0
a0 a1 a2
0
0 可
0
0
B'
控 标
1
an1
0 1
准 形
AT=A’
BT=B’
0 0 0 1 0 0 A 0 1 0
a0
a1
C 0
0 1
0 0
a2
可观标准形
1 an1
结论:状态方程具有可观测标准形的系统一定可观测。
C 0 0
CA
0
0
V
CA2
3.2线性定常系统的可观测性
1.线性定常离散系统状态可观测性
(1) 离散系统可观测定义
x(k 1) Gx(k) Hu(k ) y(k) Cx(k) Du(k)
已知输入u(0),…,u(n-1)的情况下,通过在
有限个采样周期内测量到的输出y(0),y(1),…, y(n-1),能唯一地确定任意初始状态x(0)的n个分量, 则称系统是完全可观测的,简称系统可观测。
(2) 线性定常连续系统可控性判据
若线性定常连续系统的状态方程为
x Ax Bu
则该系统可控的充分必要条件为其可控性矩阵
Sc B AB
满秩,即 rankSc n
An1B
示例
(3) 可控标准形
结论:状态方程具有可控标准形的系统一定可控。
x1 0
x2
0
xn
1
0
xn a0
使上述方程组有解的充分必要条件是
Sc' Gn1H
GH H
满秩,且 rankSc' n
亦即 Sc H GH
Gn1H 且rankSc n
离散可控性例题
大连理工大学 现代控制理论 王金城 第三章 答案

第3章习题参考答案:3-1 (1)1101 0221rank[] 2 rank[]2c o c o ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦==Q Q Q Q 能控,能观测(2) 1979818100139155153 rank[] 3 201618139153c c ⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦Q Q 100210123 rank[] 33812913363550141o o ⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦Q Q 能控,能观测(3) 根据能控/能观测判别准则二知,系统能控,但不能观测 (4) 00()()1t t ⎡⎤==⎢⎥⎣⎦M b1001d()(t)()()d t t t t t -⎡⎤=-+=⎢⎥-⎣⎦M A M M [][][]010*******()() rank[]21()()01d()()()()0d ()01 rank[]2()0c c o o t t t t t t t t t t tt t t -⎡⎤===⎢⎥-⎣⎦===+=-⎡⎤⎡⎤==<⎢⎥⎢⎥⎣⎦⎣⎦Q M M Q N c N N A N N Q Q N能控但不能观测(5) 02()()t t e t t e --⎡⎤==⎢⎥⎣⎦M b1000d()(t)()()0d t t t t ⎡⎤=-+=⎢⎥⎣⎦M A M M[]0120100010()() rank[]20()()1d ()()()()13d ()1rank[]2()13tc c tt tt o o t e t t e t t e t t t t e tt e t e ------⎡⎤==<⎢⎥⎣⎦⎡⎤==⎣⎦⎡⎤=+=--⎣⎦⎡⎤⎡⎤==<⎢⎥⎢⎥--⎣⎦⎣⎦Q M M Q N c N N A N N Q Q N能观测但不能控3-2 (1) 矩阵A 为约当标准形,对应于唯一特征值12λ=-共有3个约当块。
系统完全能控的充要条件是矩阵B 中对应于三个约当小块的末行为行线性无关。
现代控制理论 3-3 线性系统的可观性 3-4 可控可观标准型

返回
说说 明明
⎧x&(t) = Ax(t) ⎩⎨y(t) = Cx(t)
e 当输出个数与状态个数相等,且C 阵可逆时,
状态观测值可以立刻获得:x(t) = Cn×n−1y(t)
a 当输出个数少于状态个数时,状态观测值需要一定
c的时间来确定,即:
y(t0 ) = Cx(t0 )
y y(t1) = Cx(t1) = CeA(t1−t0 )x(t0 )
tc M
x(t ) = eA(t−t0 )x(t0 )
y(t) ⇒ x(t0 ) ⇒ x(t)
——由输出测量值求状 态初值,再由状态初值 求状态任意时刻的值。
定义
3
二、线性定常连续系统的可观测性判据
e 格拉姆矩阵判据
ca 线性定常连续系统完全可观 ⇔ 存在 t1 > 0
tcy ∫ 使格拉姆矩阵
注 意 对角阵含有相同元素时,要求更高!
e ⎡λ1
⎤
⎢
a ⎢
λ1
⎥ ⎥
⎢⎣
λ2 ⎥⎦
A 的两重特征值有两个 独立的特征向量
c¾¾CC矩矩阵阵的的列列线线性性无无关关 tcy or:秩判据
⎡C⎤
⎢ rank ⎢
CA
⎥ ⎥=n
⎢M⎥
⎢ ⎣CA
n−1
⎥ ⎦
返回
8
例:判别下列对角规范型线性定常系统的可观性。
CA M
⎥
⎥ ⎥
=
dim
A
=
n
tc ⎢⎣CA
n−1
⎥ ⎦
nq×n阶可观测性矩阵
返回
4
例:判别下列系统的可观性。
⎡0 1 0⎤
e x&
现代控制理论 工程硕士 第三章 线性系统的能控性与能观性

ui ( k ), ui ( k + 1),, ui ( k + m 1) ( i = 1,2,, p )
在有限的m个采样周期之内, 在有限的m个采样周期之内,能使系统的状态向 量从任意给定的初态x(k) x(k), 量从任意给定的初态x(k),转移到任意期望的终 (k+m), 态xf(k+m),则称该离散系统是状态完全能控的 简称系统能控. ,简称系统能控.
定理
n阶线性定常离散系统 x ( k + 1) = Ax ( k ) + Bu( k )
状态完全能控的充要条件为, 状态完全能控的充要条件为,系统的能控性矩阵
Qk = [ B
的秩为n 的秩为n
AB
A 2 B A n 1 B ]
例:设单变量线性定常离散系统的状态方程为 1 2 1 0 x( k + 1) = 0 1 0 x( k ) + 0 u( k ) 1 4 3 1 试判断系统的能控性. 试判断系统的能控性. 解
输出y只能反映状态变量 x2 ,所以
x1不能观测.
例2:取 iL 和uc 作为状态变量,u—输入, y= uc --输出. L (1)当 R1 R4 ≠ R2 R3 + u -
iL
R1
R2
R3
uc
R4
状态能控,能观测 (2)当 R1 R4 = R2 R3 uc ≡ 0 u只能控制 iL , 不能控,不能观测.
λ3 λ3 λ3
0 1 0 B = 0 1 0 1
0 0 0 0 1 0 0 1 0 0 1 0 0 0
能控
4. 线性变换后系统的能控性不变 设
x = Ax + Bu
现代控制理论习题解答(第三章)
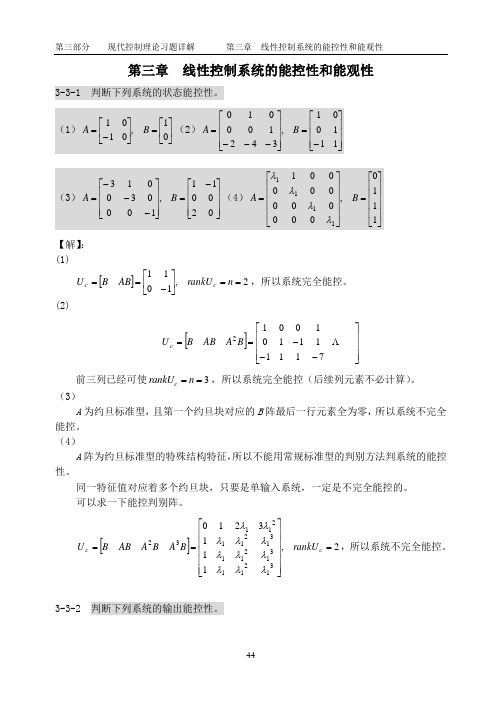
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ 【解】:(1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CAB CB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。
现代控制理论第三章PPT
( A
c1
,bc1 ) 的能控性,其中
1 0 0 0 A c1 0 0 2 5
解:
0 0 1 0 0 1 1 10
0 0 b c1 0 1
0 1 0 0 0 0 1 10 A3 c1b c1 0 1 10 101 1 10 101 1025
若取
u( t ) B( t )T ΦT ( t0 ,t )Wc1( t0 ,t f )x( t0 )
tf t0
x( t f ) Φ( t f ,t0 )[ x( t0 )
Φ( t0 ,t )B( t )B( t )T ΦT ( t0 ,t )Wc1( t0 ,t f )x( t0 )dt ]
( k 1,2, , n 1 )
假设 F( t ) Φ( t0 ,t )B( t ) 对上式关于时间t求一阶、二阶、直至n-1阶导数 ,可得
(t ) Φ (t , t )B(t ) Φ(t , t )B (t ) F 0 0
(t ) Φ(t0 , t )A(t )B(t ) Φ(t0 , t )B
实现最优控制和最优估值及其它系统综合
与校正的必要条件。
4.1 系统的能控性
[定义]设系统的状态方程为
(t ) A(t )x(t ) B(t )u(t ) x
对于任意非零初始状态 x(t0 ) ,如果存在容许控制u(t ) ,在有限时区
t [t0 , t f ] 将其转移到状态空间原点,即 x(t f ) 0 ,则称系统在
(t )] Φ(t0 , t )[A(t )B(t ) B
Φ(t0 , t )B1 (t )
现代控制理论第三章

方法二:
转化为约旦标准形 ( Aˆ, Bˆ ) ,再根据 Bˆ 判断
方法三: 传递函数
3.2 线性连续系统的能控性
方法一:线性定常连续系统(A,B), 其状态完全能控的 充要条件是其能控性矩阵的秩为n,即:
rankQc = n Qc = [ B AB A2B … An 1B ]
0 0 2
3
4 1 0
4 2
(2)
x (t)
0
4
0 x(t) 0 0u(t)
0 0 2
3 0
3.2 线性连续系统的能控性 方法三:
3.2 线性连续系统的能控性 例:从输入和状态矢量间的传递函数确定其能控性?
3.2 线性连续系统的能控性 例:判断线性连续系统能控性?
解:
3.2 线性连续系统的能控性
3.3 线性系统的能观测性
例:判断能观测性?
x (t)
2 1
1 3
x(t
)
1
1
u(t)
y(t
)
1 1
0 0 x(t)
解:
C Q0 CA
10 1 0
2 1 2 1
rankQo = 2 = n
系统能观测
3.3 线性系统的能观测性
例: 若系统的状态空间表达式为
x (t)
a d
5
x(t
)
1
7
(2)
x (t)
5
x(t)
1
y(t) 0 4 5x(t)
3 2 0 y(t) 0 3 1 x(t)
(3)
3 1 0
0 3 1
x (t) 0 0 3
x(t)
2
现代控制理论第三章

B
AB
0 1 An 1B n 1
如果系统是能控的,对于任意给定的初始状态x(0)都 能解出 i , i 0, , n 1,其有解的充分必要条件为
rank B AB An 1 B n
判断下面系统的能控性
输出能控性定义:如果系统的输入信号能在有限的 时间区间[t0,tf]内,将系统的任意初始输出转移到y(tf), 那么该系统为输出完全能控的。
输出能控性判据:考虑系统
x ' Ax Bu y Cx Du
状态完全能控的充分必要条件是
rank CB CAB CAn 1 B D m
上式表明,根据在[0,tf]时间的量测值y(t),能够 将初始状态x(0)唯一地确定下来的充要条件是
C CA n rank n 1 CA
(1)在能观测性定义中之所以把其规定为对初始 状态的确定,是因为一旦确定了初始状态,便可以 根据给定的输入信号u(t),利用状态转移方程求出系 统在各个瞬时的状态。 (2)能观测性表示的是y(t)反映状态向量x(t)的能 力,考虑到输入信号u(t)所引起的输出是可计算的, 所以在分析能观测性问题时,常令u(t)=0。
S1的能控性等价于S2的能观性
S1的能观性等价于S2的能控性
四、能控标准型和能观标准型(单变量系统线性系统) 1 、能控标准型 若系统的状态空间表达式为:
x ' Ac x bcu y Cc x
0 Ac 0 an
1 0 an 1
0 1 a1
能控性判据:考虑系统
x ' Ax Bu
状态完全能控的充分必要条件是
rank B AB An 1 B n
第3章 能控性和能观性
注:证明要用到结构的可控性分解的结果
PBH特征向量判据
线性定常系统完全可控的充分必要条件是不存在A 的非零左特征向量 T与B的所有列正交,即
T T T A , B0 i
证明:采用反证法。反设存在向量 0
A , B0 i
T T T T T B 0, T AB B 0, i
3.2 线性定常系统的可控性判据
由定义,可控性仅与状态方程式有关,与输出方 程式无关。 由 x(T ) 0 有
x0 e
t0
T
A
Bu ( )d
由此有 x0 可控的充分必要条件是存在满足上式的
容许控制:
u ( )
t0 T
说明:根据上述条件进行可控性判定难于操作。 引理1 点 x n 可控的充分必要条件是 0
那么对于任意的非零初始状态 x0 可构造控制律
u(t ) B e
T AT t
W (0, t1 ) x0 , 0 t t1
1
在该控制作用下系统在t时刻的状态为
x(t1 ) e x0 e
At1 0
t1
A t1 t t1
Bu (t )dt BB e
1 T AT t
说明:
1. 定义中没有对状态转移的轨迹和具体的时间 长度加以限制和规定,因此它仅是系统运动的一 定性特性; 2. 定义中的容许控制是指满足使系统解唯一存 在的所有控制的集合,对线性定常系统来说,是 要求其每个分量平方可积。 3. 对于时变系统,可控性与初始时间 t0 有关, 而对于线性定常系统,则可控性与初始时间 t0 无 关 4. 对于连续线性定常系统,可控性和可达性等 价,而对于时变及离散系统两者不等价。
现代控制理论第三章线性系统的能控性和能观测性

1 x1 u x 2 2 x2 u x y x x 1 2
1 x
u
1 s 1 s
2
x1
y
x2
2 x
由于状态变量x1、x2都受控于输入u,所以系统 是能控的;输出y能反映状态变量x1,又能反映状 态变量x2的变化,所以系统是可观测的。 即状态变量x1能控、可观测;状态变量x2能控、 可观测。
任意初态 x(t0 ) x 零终态 x(t f ) 0
状态完全能控
Байду номын сангаас
第 三章 线性控制系统式的能控性和能观测性
②把系统的初始状态规定为状态空间的原点, 即 x(t 0 ) 0,终端状态规定为任意非零有限点, 则可达定义表述如下: 对于给定的线性定常系统
Ax Bu ,如果 x
存在一个分段连续的输入 u (t ),能在 [t 0 , t f ] 有限时间间隔内,将系统由零初始状态 x(t 0 ) 转移 到任一指定的非零终端状态 x(t f ) ,则称此系统 是状态完全可达的,简称系统是可达的(能达的)。 任意初态 x(t0 ) 0 零终态 x(t f ) x 状态完全可达
第 三章 线性控制系统式的能控性和能观测性
1. 直接由A,B矩阵的结构判断系统的能控性 定理: 系统
( A, B )
即
A(t )x B(t )u x y C (t )x D(t )u
状态完全能控的充分必要条件是其能控性矩阵
Qk [ B AB A2 B An1 B]
一、线性定常连续系统状态能控性的定义 定义3.1(状态能控性定义):
Ax Bu,如果存在一个 对于线性定常系统 x 分段连续的输入u(t),能在有限时间间隔[t0,tf]内, 使得系统从某一初始状态x(t0)转移到指定的任一 终端状态x(tf) ,则称此状态是能控的。若系统的 所有状态都是能控的,则称此系统是状态完全能 控的,简称系统是能控的。
现代控制理论基础_周军_第三章能控性和能观测性

3.1 线性定常系统的能控性线性系统的能控性和能观测性概念是卡尔曼在1960年首先提出来的。
当系统用状态空间描述以后,能控性、能观测性成为线性系统的一个重要结构特性。
这是由于系统需用状态方程和输出方程两个方程来描述输入-输出关系,状态作为被控量,输出量仅是状态的线性组合,于是有“能否找到使任意初态转移到任意终态的控制量”的问题,即能控性问题。
并非所有状态都受输入量的控制,有时只存在使任意初态转移到确定终态而不是任意终态的控制。
还有“能否由测量到的由状态分量线性组合起来的输出量来确定出各状态分量”的问题,即能观测性问题。
并非所有状态分量都可由其线性组合起来的输出测量值来确定。
能控性、能观测性在现代控制系统的分析综合中占有很重要的地位,也是许多最优控制、最优估计问题的解的存在条件,本章主要介绍能控性、能观测性与状态空间结构的关系。
第一节线性定常系统的能控性能控性分为状态能控性、输出能控性(如不特别指明便泛指状态能控性)。
状态能控性问题只与状态方程有关,下面对定常离散系统、定常连续系统分别进行研究(各自又包含单输入与多输入两种情况):一、离散系统的状态可控性引例设单输入离散状态方程为:初始状态为:用递推法可解得状态序列:可看出状态变量只能在+1或-1之间周期变化,不受的控制,不能从初态转移到任意给定的状态,以致影响状态向量也不能在作用下转移成任意给定的状态向量。
系统中只要有一个状态变量不受控制,便称作状态不完全可控,简称不可控。
可控性与系统矩阵及输入矩阵密切相关,是系统的一种固有特性。
下面来进行一般分析。
设单输入离散系统状态方程为:(3-1)式中,为维状态向量;为纯量,且在区间是常数,其幅值不受约束;为维非奇异矩阵,为系统矩阵;为维输入矩阵:表示离散瞬时,为采样周期。
初始状态任意给定,设为;终端状态任意给定,设为,为研究方便,且不失一般性地假定。
单输入离散系统状态可控性定义如下:在有限时间间隔内,存在无约束的阶梯控制信号,,,能使系统从任意初态转移到任意终态,则称系统是状态完全可控的,简称是可控的。
现代控制理论第三章答案可修改全文

xc xc
0u 0
y cRc 1
1
1
xc xc
【习题3-12】试将下列系统按能观性进行结构分解。
1 2 1 0
(1) x 0 1
0
x
0u
1 4 3 1
y 1 1 1x
【解】判别能观性
c 1 1 1
N
cA
2
3
2
cA2 4 7 4
构造变换矩阵
Rank(N ) 2 n
将能控子空间按能观性分解
xc
0 1
8 1/ 3 6xc 1/ 6
1/ 3 1 1/ 3xc 0u
y1 1 2xc
c 1 2 Nc cA 2 4
Rank(Nc ) 1
Ro1
1 1
2
0
0 1 Ro 1/ 2 1/ 2
按能观性分解后:
0 0
即:
2 1 1
(2)
A
1 3
2
4
b
1 1
c 1
0
【解】M b
Ab
1 1
1 2
3
4
c 1 0
N cA 1
2
1 M
1
1 2 3 4
3 4 1 2
0
10
N
1
2 2 0
完全能控完全能观的条件:
3 2
4
0
1
2
0
(3)
M b
0 0 2 1
A 1
0
3
b
2
Ac 2
Tc21 ATc2
0 1
5 4
bc2
Tc21b
1 4
7 1
31 1 1
1 0
现代控制理论第3章

第3章控制系统的能控性和能观测性在多变量控制系统中,能控性和能观测性是两个反映控制系统构造的基本特性,是现代控制理论中最重要的基本概念。
本章的内容为:1. 引言——能控性、能观测性的基本概念2. 能控性及其判据3. 能观测性及其判据4. 离散系统的能控性和能观测性5. 对偶原理6. 能控标准形和能观测标准形7. 能控性、能观测性与传递函数的关系8. 系统的结构分解9. 实现问题10. 使用MATLAB判断系统的能控性和能观测性3.1 引言首先,通过例子介绍能控性、能观测性的基本概念。
)(tuCux =例3-1电路如下图所示。
如果选取电容两端的电压为状态变量,即:。
电桥平衡时,不论输入电压如何改变,不随着的变化而改变,或者说状态变量不受的控制。
即:该电路的状态是不能控的。
Cu )(t u C u t x =)()(t u 显然,当电桥不平衡时,该电路的状态是能控的。
系统状态方程的解为ττu t x t τt d )(e 11)(0)(ò--úûùêëé=可见,不论加入什么样的输入信号,总是有21x x =系统状态转移矩阵为úûùêëé+--+=--------t t tt t t t t t3333e e e e e e e e 21e A 系统状态方程的解为ττt u t τt ttd )(e)0(e)()(0-+=-òb x x A A为了简便起见,令0)(ºtu则)0(e)(x x A tt =ttx x t y 321e)]0()0([)0(e )(--==x C A 一般情况下,系统方程如式(从上式可知,不论初始状态为什么数值,输出仅仅取决于其差值。
当,则输出恒等于零。
显然,无法通过对输出的观测去确定初始状态,称这样的系统是不能观测的。
)]0()0([21x x -)0()0(21x x =()y t 对于不能观测的系统,其不能观测的状态分量与y 既无直接关系,又无间接关系。
第三章线性控制系统的能控性和能观性

第三章 线性控制系统的能控性和能观性在现代控制理论中,能控性和能观性是卡尔曼(Kalman )在1960年首先提出来的,它是最优控制和最优估值的设计基础。
能控性和能观性是分别分析)(t u 对状态)(t x 的控制能力以及输出)(t y 对状态)(t x 的反映能力。
§3-1 能控性的定义能控性所研究的只是系统在控制作用)(t u 的作用下,状态矢量)(t x 的转移情况,而与输出)(t y 无关。
矢量的线性无关与线性相关:如果0x x x x 332211=++++n n C C C C 式中的常数n C C C 21,满足0321====n C C C C ,则把向量n x x ,x 21 叫做线性无关。
例如向量⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0102x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1003x 便是线性无关。
若向量n x x ,x 21 中有一个向量i X 为其余向量的线性组合,即:∑≠==nij j jj i C 1x x 则称向量n x x ,x 21 为线性相关。
例如向量⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3211x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1012x⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=4223x 便是线性相关。
又例如在式中213x x x +=,0x 3x x 321=++式中系数并不全为零。
故为线性相关。
具有约旦标准型系统的能控性判据 1.单输入系统先将线性定常系统进行状态变换,把状态方程的A 阵和B 阵化为约旦标准型)ˆ,ˆ(B A,再根据B 阵确定系统的能控性。
具有约旦标准型系统矩阵的单输入系统,状态方程为bu x x+=λ ,或bu Jx x+= 。
其中:⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=n λλλλλ 00321,各根互异。
其中:(特征值有重根的)⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=++n m m J λλλλλλ010010121111 ,⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n b b b b 21 下面列举两个二阶系统,对其能控性加以剖析。
现代控制理论第3章能控性和能观测性ppt课件

1 2
解:计算
G1
0
2
0 4
2 4
2G1
0
4
1 10
故 S2 G1 G1
0 0 2G1 0 1
1 0
1 2 0 2 0 4
2 4 0 4 1 10
显见由前三列组成的矩阵的行列式
0 0 1 det 0 1 0 0
1 0 0
故rank S2 3,系统可控。
S2 G2 G2
0 1 2G2 0 0
任意初态x0转移到xn 0 。
方程(3-11)的解为: k 1
x k kx 0 k1iGu i
i0
(3-12)
令 k n,,且两端左乘 n得:
n1
x 0 1iGu i
i0
1Gu 0+2Gu 1 nGu n 1
1G 2G
u0
nG
பைடு நூலகம்
u 1
u n 1
令
S1 1G 2G nG
1 0
1 -2 00 01
显见出现全零行,rankS2 2 3 ,故不能控。
2 3 0 0 1 -2
多输入系统能控阵 S2,其行数小于列数,在计算列写能控阵时, 若有显时见可通过矩计S阵2算的秩为Sn的2,秩S便T2 是不否必为把n来判矩断S阵2多的输所入有系列统都的写能出控。性。 这只是需因计为算,一当次n阶非行奇列S异式2 时即,可确定能必S控非2 性奇ST2,异但,在而计算 为S方2 S阵T2 ,
解 rank S1 rank g g 2g rank 2 2 2 1 3
故不能控。
1 1 1
关于研究单输入离散系统状态可控性的方法可推广到多输入系 统。设系统状态方程为:
xk 1 xk Guk
现代控制理论第3章能观测性及其判据讲义资料
A
对A的每一个特征值λi之秩为n。(PBH判别法)
非奇异变换不改变系统的能观测性
定理三:线性定常连续系统,若A 的特征值互异,经非奇异变换后为
1
x
2
x Bu
n
y Cx
系统能观测的充分必要条件是 C 阵中不包含全为零的列
定理四:线性定常连续系统,若A阵具有重特征值,且对应每一个重特征 值只存在一个独立的特征向量,经非奇异变换后为:
设系统能观测,但 W (t0 , t1 ) 是奇异的,即存在非零初态,使
W(t0,t1)x0 0
x0TW(t0,t1)x00
xTt1 0 t0
T (t,t0 )C T (t)C (t)(t,t0 )d tx 0 0
t1 yT(t)y(t)dt 0 t0
y(t) 0
2:线性定常系统 定理一:对于线性定常系统,其能观测的充要条件是
观测的,简称不能观测。
定x 由(t义)于 :( 设t nt0 维)x 系(t0 ) 统 的tt0 动(t态 方)B 程(为) u d u (xty) C A((tt))xx11s x1(B D 0)((ttx)1)uu
x2 (0) 1
x2
y(t)
s
2
若可对见状系态统空的间状中态的x(t任)的一能状观态测x(t0),存在一有限时间t1-t0,使得由控制输入 u性(t与0,tx1)(和t0)输的出能y观(t测0,t1性)的是信等息价足的以确定x(该t0)系,统则是称不系能统观在测t0时的刻是完全能观测的。
1 0 0 4 1 10
ranckQ 3
系统是能控的
1 2
令x(1)=0 x(0)G1Hu(0)0 2
1 2 1 2 x1(0)
现代控制理论-第3章
3.2 线性定常系统的能控性判别
线性定常系统能控性判别准则有两种形式,一种是先将系统进行状态变
换,把状态方程化为约旦标准型 ,再根据 阵,确定系统的能控性; 另一种方法是直接根据状态方程的 A 阵和 B 阵,确定其能控性。 3.2.1 具有约旦标准型系统的能控性判别 1.单输入系统 具有约旦标准型系统矩阵的单输入系统,状态方程为: (1) 或 (2) 式中
能观性矩阵。仿连续时间系统,记为N。即
(5)
3.5 时变系统的能控性与能观性
3.5.1 能控性判别 1.有关线性时变系统能控性的几点说明 1)定义中的允许控制 绝对平方可积的,即 ,在数学上要求其元在 区间是
这个限制条件是为了保证系统状态方程的解存在且唯一。 2)定义中的 ,是系统在允许控制作用下,由初始状态 转移到 目标状态(原点)的时刻。 3)根据能控性定义,可以导出能控状态和控制作用之问的关系式。 4)非奇异变换不改变系统的能控性。
根据3.3节中能观性定义,如果知道有限采样周期内的输出 一地确定任意初始状态矢量 导能观性条件。从式(1),有:
,就能唯
,则系统是完全能观的,现根据此定义推
(3) 若系统能观,那么在知道 出 , 时,应能确定 ,现从式(7)可得:
写成矩阵形式:
(4)
有唯一解的充要条件是其系数矩阵的秩等于 。这个系数矩阵称为
3.6.1 线性系统的对偶关系
有两个系统,一个系统 为:
另一个系统
:为:
若满足下述条件,则称
与
是互为对偶的。
式中,
为 维状态矢量; 为 各为 与
各为r与m维控制矢量; 系统矩阵; 各为, 维输出矩阵。
各为 与 ,
与 维输出矢量; 维控制矩阵;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
J2
⎢
⎣
⎤
⎥
⎥ ⎥
X
+
BU
,Y
=
CX
J
n
⎥ ⎦
中,和每个约当块 Ji (i = 1,2, , k) 的首行相对应的C 阵中的那些相应列,其每列 元素不全为零。
若两个约当块有相同特征值,上述结论不成立;若想要上述结论成立,则需
要对应的C 阵中相应列是线性独立的。
综上可知,能观标准型实现一定能观;能观,则通过线性非奇异变换一定能 化成能观标准型实现。能控标准型实现一定能控;能控,则通过线性非奇异变换 一定能化成能控标准型实现。线性非奇异变换不改变系统的能控能观性。
n−1
∑ Y (t)凯-哈定理 b j (t)CA j X (0) j=0
(2)
〔1〕 SO 系统时: 即 C1×n 。
3
第三章 线性系统的结构特性
此时,下列的几个量都是标量: β0 = CX (0), β1 = CAX (0), β n−1 = CAn−1 X (0)
(3) → (2) :
(3)
λI − A = λI − AT = λI − A = 0
○3 互为对偶的系统的传递矩阵互为转置:
G (s) = C (sI − )A −1 B
( ) ( ) G ( s) = C sI − A −1 B = BT sI − AT −1 CT
=
BT
⎡⎣( sI
) −
A
T
⎤ ⎦
−1
C
T
=
BT
⎡⎣( sI
−
)A
−1 ⎤T ⎦
CT
=
⎡⎣C (sI
−
)A −1
B
⎤T ⎦
= GT (s)
○4 互为对偶的系统能控能观性的关系
定理:互为对偶的二系统{A,B,C}、{ A, B,C },当系统{A,B,C}状态完全
能控(完全能观)时,系统{ A, B,C }状态完全能观(完全能控)。 证:设{A,B,C}状态完全能控,即 rank[s]=rank[B AB … An-1B]=n
0
解:因为 A = ⎢ 0 1
⎢
⎢
⎢⎣ 0 0
所以,能观性矩阵为
0 − a1 ⎤
0
−
a2
⎥ ⎥
0
−
a3
⎥ ⎥
, C = [0
⎥
1 − an ⎥⎦ n×n
0 1]1×n
⎡C ⎤
⎡0
⎢
V
=
⎢ ⎢
CA
⎥ ⎥ ⎥
⎢ =⎢
⎢
⎢⎣CA
n−1
⎥ ⎦
nl×n
⎢⎣1
1⎤ ⎥ ⎥ ⎥ ⎥ ⎦ n×n
系统的能观性矩阵V 为下三角阵。因为 V = 1 ,所以 rank[V ] = n 。即能观标
1
第三章 线性系统的结构特性
图 3-18
例 3-18 系统的状态图如图 3-19 所示,试判别其能控、能观性。 图 3-19
2
第三章 线性系统的结构特性
系统的状态方程为:
⎧ ⎪X ⎨
=
⎡−1 ⎢⎣ 0
0⎤ −1⎥⎦
X
+
⎡1⎤ ⎢⎣1⎥⎦
u
⎪ ⎩
y = [0 1] X
系统的传递函数为:
G(s) = Y = 1 U s +1
例 3-16 判别下列各系统的状态能观性。
8
第三章 线性系统的结构特性 9
第三章 线性系统的结构特性
解: (1) C1=0,不能观,x1 不能观。 (2) 能观 (3) 不能观。因为特征值相等而能化为对角阵,且 C1、C2 相关。 (4) 不能观。因为特征值相等而能化为约当阵,且 C1、C3 相关 (5) 不能观。因为 J1 首行对应的 C 的列元素全为零。 (6) 能观
Y (t) = β0b0 (t) + β1b1 (t) + + β b n−1 n−1 (t)
∵ 可以证明 b0 (t),b1 (t), bn−1 (t) 是线性独立的(参见 [日]须田信英,
《自动控制中的矩阵理论》,科学出版社,1979 年 9 月,PP.253-254)。
∴ β0 , βn−1 这几个标量是由观测Y (t) 唯一确定的常数。
13
第三章 线性系统的结构特性
在零极点对消时,系统并非一定是不能控或不能观测的。 下面,从两个角度来研究利用传递函数阵来判断系统的能控性和能观性,即: z 利用传递短阵中的行或列向量的线性相关性来作判据 z 利用传递矩阵零极点对消来作判据。
⎡C ⎤ ⎡BT ⎤
⎢
∵V
=
⎢C A ⎢
⎥ ⎥ ⎥
=
⎢ ⎢
BT
⎢
AT
⎥
⎥ ⎥
=
⎡⎣ B
AB
⎢
⎥⎢
⎥
⎢⎣C
n−1
A
⎥ ⎦
⎢⎣BT AT n−1 ⎥⎦
An −1 B ⎤⎦T
10
第三章 线性系统的结构特性
∴ rank[V ]=rank[ ST ]=rank[S]=n ∴{ A, B,C }状态完全能观。 反之亦成立。 ○5 对偶原理的意义: 现代控制理论中的一个重要概念:利用对偶原理,可使系统的能控(观) 性研究转化为对偶系统的能观(控)性的研究。从而沟通了最优控制与最优 估计之间的内在联系。
单输入—单输出线性定常系统能控和能观到的充分必要条件是:系统传递函 数没有零极点对消,或传递函数不可约,或传递函数的极点等于短阵 A 的特征值。
二、多输入—多输出系统 对于多输入—多输出系统,利用其传递矩阵的特征来判断系统的能控性和能
观测性,要比单输入—单输出系统复杂得多。因为多输入—多输出系统传递阵存
准型实现一定是状态完全能观的。
(2)定理:SISO 线性定常连续系统如果状态能观,则存在一个非奇异变换矩阵 Tn×n,使x = Tx ,可将系统变为能观标准型。
5
第三章 线性系统的结构特性
单输入、单输出系统的能控标准型和能观标准型是唯一的。这是因为其能控 性矩阵 S 和能观性矩阵 V 都只有唯一的一组 n 个线性无关的向量,由它们的线性 组合可导出两组基,变换矩阵 Q 和 T 分别由这两组基构成,而能控标准型和能观 标准型则是在这两组基下系统所具有的两种标准型式。
若重根λ对应的C 中各列独力,则系统能观。 (3)定理:设 n 维系统{ A 、C }有重特征值为:λ1为m1重根,…,λk为mk 重
k
∑ 根, mi = n ;且当 i ≠ j 时,有 λi ≠ λ j 。则系统状态完全能观的充要条件是在 i=1
系统经线性非奇异变换后的约当标准形
⎡J1
⎢
X
=
⎢ ⎢
若系统在区间 [t0,t1]上的每一状态 X (t0 ) 均能观,则称系统在 [t0,t1]上完全
能观。
若根据 [t0,t1]上的输入U (t) 和输出Y (t) 提供的信息足以确定 X (t1) ,则称系
统具有能构性。
讨论: ① 能观与能测量是不同的概念,比如状态变量不一定能测量,但它可能能 观。 ②由输出信息确定其以前的状态,称为能观;由输出信息确定其以后的状态, 称为能构。在线性定常连续系统中,能观性与能构性是等价的。 ○3 能控性:U → X ;能观性:Y → X 。 例 3-18 试判别图 3-18 所示电路系统的能观性
∫ Y (t) 来求解
X (t0 ) 与据 Y (t) − C
t t0
e A(t−τ ) Bu(τ )dτ
来求解
X (t0 ) 是完全等价的。这就
是说,系统的能观性可看作只涉及 X (t) 和Y (t) 而与 u(t)无关。所以,讨论能观
性问题时,只用到 A、C 阵,系统可用{A,C}表示。
又因为所讨论系统是线性定常的,不失一般性,可以假设 t0 = 0 ,这样,问 题就变成了由方程:Y (t) = Ce At X (0) 来确定 X (0) 。
⎢⎣CA
n−1
⎥ ⎦
nl×n
证明:
∫ ∵ X (t) = e A(t−t0 ) X (t0 ) +
t e A(t−τ ) Bu(τ )dτ
t0
∫ ∴Y (t)
=
Ce A(t−t0 ) X (t0 ) + C
t e A(t−τ ) Bu(τ )dτ
t0
(1)
我们研究的目的是从输入 u(t)和输出 y(t)把状态 X (t0 ) 确定出来。因 u(t) 是给定函数,(1)式右边中的积分部分是与Y (t) 维数相同的已知函数,所以仅据
只有当 rank[V ] = n 时,存在唯一的最小二乘解:
X (0) = [V TV ]−1V T β , β 据(0, t)Y (t) 的测量值求出。
即此时从Y (t) → X (0) 是最小二乘意义下的。
4
第三章 线性系统的结构特性
例 3-15 试判别能观标准型实现的能观性。
⎡0 0
⎢ ⎢
1
的充要条件是系统经线性非奇异变换后的对角标准型运动方程
7
第三章 线性系统的结构特性
⎡λ1
X
=
⎢ ⎢
⎢⎣ 0
0⎤
⎥ ⎥
X
+
BU
λn ⎥⎦
Y = CX 的矩阵C 中不包含元素全为零的列。
注意,当 A 阵含有重特征值,且仍能对角化时,上述结论不成立。在单输出
系统中,更有结论:即使C 中不含 0 元素,{A,C }也是不能观的;在 MO 系统中,
但是,对于多输入、多输出系统,由于其能控性矩阵和能观性矩阵中 n 个线 性无关向量的选择可以不同,即不是唯一的,所以其能控标准型和能观标准型也 不是唯一的。