ABAQUS+ALE自适应网格技术
ABAQUS简介

ABAQUS是一套功能强大的基于有限元方法的工程模拟软件ABAQUS是一套功能强大的基于有限元方法的工程模拟软件,其解决问题的范围从相对简单的线性分析到极富挑战性的非线性模拟等各种问题。
ABAQUS具备十分丰富的、可模拟任意实际形状的单元库;ABAQUS也具有相当丰富的材料模型库,可以模拟大多数典型工程材料的性能,其中包括金属、橡胶、高分子材料、复合材料、钢筋混凝土、可压缩的弹性泡沫,以及地质材料,例如土壤和岩石等。
作为一种通用的模拟工具,ABAQUS不仅能够解决结构分析(应力/位移)问题。
而且能够模拟和研究包括热传导、质量扩散、电子部分的热控制(热电耦合分析)、声学分析、岩土力学分析(流体渗透/应力耦合分析)及压电介质分析等广阔领域中的问题。
ABAQUS为用户提供了广泛的功能,使用起来又非常简单。
即便是最复杂的问题也可以很容易地建立模型。
例如,对于复杂多部件问题,通过对每个部件定义合适的材料模型,然后将它们组装成几何构形。
对于大多数模拟,包括高度非线性问题,用户仅需要提供如结构的几何形状、材料性质、边界条件及载荷工况这些工程数据。
在非线性分析中,ABAQUS能自动选择相应载荷增量和收敛限度。
他不仅能够选择合适参数,而且能连续调节参数以保证在分析过程中有效地得到精确解。
用户通过准确的定义参数就能很好的控制数值计算结果。
ABAQUS 有两个主求解器模块— ABAQUS/Standard 和 ABAQUS/Explicit。
ABAQUS 还包含一个全面支持求解器的图形用户界面,即人机交互前后处理模块— ABAQUS/CAE 。
ABAQUS 对某些特殊问题还提供了专用模块来加以解决。
ABAQUS被广泛地认为是功能最强的有限元软件,可以分析复杂的固体力学结构力学系统,特别是能够驾驭非常庞大复杂的问题和模拟高度非线性问题。
ABAQUS不但可以做单一零件的力学和多物理场的分析,同时还可以做系统级的分析和研究。
Abaqus-ALE设置参数详解
三种自适应技术1.ALE adaptive meshing——控制单元网格的变形,适用于ABAQUS/Explicit及ABAQUS/Standard分析2.Adaptive remeshing——控制计算精度,仅适用于ABAQUS/Standard分析3.Mesh-to-mesh solution mapping ——控制单元网格变形,仅适用于ABAQUS/Standard的大变形问题拉格朗日方法:拉格朗日方法是比较经典的一种分析方法,他是采用的是拉格朗日坐标来描述的,反映了物体质点与它每瞬间所处的位置关系,不同的坐标代表不同的质点,也称为物质坐标,在有限元方法里面来说的话,也就是材料与网格结合在一起,网格代表坐标,材料也就是无数个质点,二者在整个分析过程中是联系在一起的。
欧拉方法:在传统的拉个朗日方法中,网格与材料是绑定的,也就是材料流动,网格也会随之变形,拉格朗日网格始终是被一种材料填满的,所以材料边界与网格边界是一样的。
相反,欧拉方法则不同,欧拉方法则是用欧拉坐标(也叫空间坐标)描述的。
欧拉坐标只识别空间,所以也叫空间坐标,每一个坐标代表一个空间点,同一个空间点,在不同的时刻可以由不同的物质点占据。
在有限元方法中来说的话,也就是欧拉网格与材料完全脱离,欧拉网格允许,网格不被材料100%充满(许多网格是部分充满或者说是有空隙的),这样的话,这使得需要在每一步增量对材料边界进行计算。
如果在欧拉方法分析过程中,某些材料流出了欧拉网格,那么这些材料就流失了,欧拉方法对其就不会起作用了。
ALE网格自适应方法结合了单纯的拉格朗日方法与欧拉方法的分析特征,通常被称为任意拉格朗日-欧拉方法。
- ]$ A& y1 x2 VALE网格自适应方法结合了上述两种算法特征,主要是用来使网格在整个分析过程中保持一种比较良好的状态,不出现巨大的扭曲与变形(通常情况下网格与材料是联系在一起的,当发生大变形的时候,材料流动显著,这就会导致某些网格节点在材料流动的带动下发生很大位移,造成网格畸变与扭曲,主要是在大变形或者材料破坏流失的情况下作用明显)。
UMESHMOTION子程序模拟接触磨损
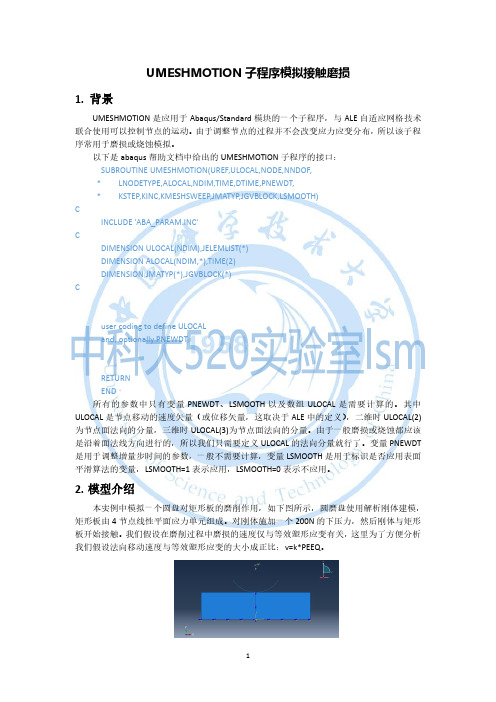
图 15 未使用 UMESHMOTION 子程序时的计算结果
图 16 使用 UMESHMOTION 子程序后的计算结果
6. 附录
6.1 未使用子程序的 inp 文件
ale-moxiao-190306.inp
6.2 使用子程序的 inp 文件
umeshmotion-ale-190306.inp
6.3 子程序文件
umeshmotion-moxiao-190306.for
9
DIMENSION ARRAY(15) DIMENSION JELEMLIST(10),JELEMTYPE(10)
double precision k,PEEQ C 定义与节点相连的最大单元数和移动速度系数 k
NELEMS = 10 k=1.0 C 获取与本节点相连的单元列表 JELEMLIST CALL GETNODETOELEMCONN(NODE, NELEMS, JELEMLIST, JELEMTYPE, * JRCD, JGVBLOCK) C 获取节点上的各塑形分量 PE(来自积分点上场输出的差值) CALL GETVRMAVGATNODE(NODE,JTYP,'PE',ARRAY,JRCD,JELEMLIST,NELEMS, * JMATYP,JGVBLOCK) C 等效塑形应变为 PE 数组中的第 7 项 PEEQ=ARRAY(7) C 若等效塑形应变大于 0 则计算节点的法向运动速度 ULOCAL(NDIM) if(PEEQ.GT.0.0)then
C INCLUDE 'ABA_PARAM.INC'
C DIMENSION ULOCAL(NDIM),JELEMLIST(*) DIMENSION ALOCAL(NDIM,*),TIME(2) DIMENSION JMATYP(*),JGVBLOCK(*)
ABAQUS帮助文档翻译

节选-ABAQUS帮助文档翻译 reference to: user manual 18.62008-10-10 12:5918.6 理解自适应网格(adaptive meshing)自适应网格可以通过移动独立的材料网格(allowing the mesh to move independently of the material),让你在整个分析过程中即使发生大变形,也能保持高质量的网格。
通常自适应网格只移动节点,网格的拓扑并不改变。
注意:通常自适应网格多用在Dynamic (动态分析),Explicit and Dynamic(显示动态分析), Temp-disp, Explicit 中。
定义模型中某个区域采用自适应网格的设置:other-->Adaptive Mesh Domain 自适应网格的选项控制设置:Other--〉Adaptive Mesh Controls 通常,在每一个step中只能有一个自适应网格区域。
21.2.1 ABAQUS/Standard defines contact between two bodies in terms of two surfaces that may interact; these surfaces are called a “contact pair.”ABAQUS/Standard defines “self-contact,” which is available only in two-dimensional analysis, in terms of a single surface. [if gte vml 1]><![endif][if !vml][endif]Figure 21.2.1–1 Contact and interaction discretization. 从the first surface (the “slave” surface)的节点向the second surface (the “master” surface)做垂线,寻找最近的垂线的垂足,The interaction is then discretized between the point on the master surface and the slave node. Strict master-slave contact 在这种关系下,主面的节点可以穿入从面(副面),但副面不可以穿入主面。
ABAQUS学习零碎笔记(转自Simwe)
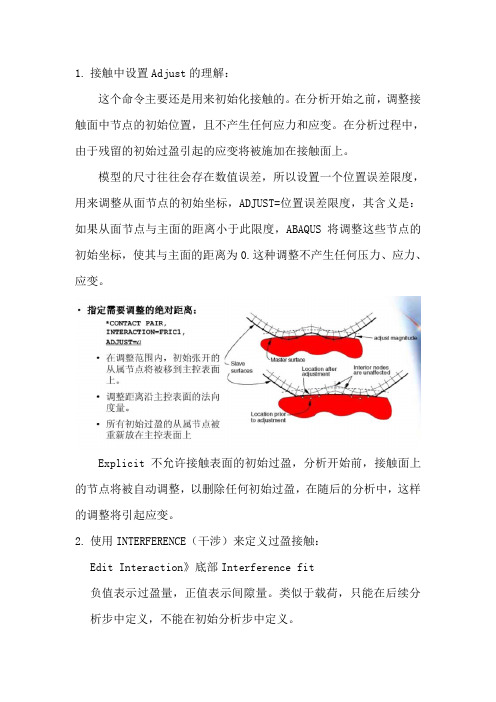
1.接触中设置Adjust的理解:这个命令主要还是用来初始化接触的。
在分析开始之前,调整接触面中节点的初始位置,且不产生任何应力和应变。
在分析过程中,由于残留的初始过盈引起的应变将被施加在接触面上。
模型的尺寸往往会存在数值误差,所以设置一个位置误差限度,用来调整从面节点的初始坐标,ADJUST=位置误差限度,其含义是:如果从面节点与主面的距离小于此限度,ABAQUS将调整这些节点的初始坐标,使其与主面的距离为0.这种调整不产生任何压力、应力、应变。
Explicit不允许接触表面的初始过盈,分析开始前,接触面上的节点将被自动调整,以删除任何初始过盈,在随后的分析中,这样的调整将引起应变。
2.使用INTERFERENCE(干涉)来定义过盈接触:Edit Interaction》底部Interference fit负值表示过盈量,正值表示间隙量。
类似于载荷,只能在后续分析步中定义,不能在初始分析步中定义。
3.CLERENCE(间隙)可以定义两个接触面之间的初始过盈量和间隙量,它只适用于小滑移,并且不需要使用ADJUST来调整从面节点的初始位置。
4.特征:记录了设计目的,并包含几何信息,同时也是管理几何体的行为的规则。
ABAQUS中导入的几何体是没用特征的,要删除不重要的细节。
5.View=》ODB Display Options =》Sweep and Extrude6.CPRESS接触压强7.COPEN从面上节点与主面的距离8.ALE自适应网格:Step=>Other=>Adaptive Mesh Domain9.计算代价估算:隐式:自由度数目的平方显式:自由度正比10.软接触:用指数或者表格形式表达的应力-距离关系11.传说ABAQUS默认的幅值曲线是从1下降到0的。
是吗?我觉得6.9的版本好像不是这样。
给一个棱柱施加扭转力矩,载荷采用Ramp,变形是逐步增大的。
12.Visualization》Tools》Job Diagnostics13.修改严重不连续迭代尝试次数:Step>Other>General Solution Controls>Edit>Specify>Time Incrementation>More>Is>1214.接触问题中,90度圆角至少划分是个单元。
ABAQUS介绍

最先进的大型通用非线性有限元分析软件——ABAQUS1、概述美国ABAQUS软件公司成立于1978年,总部位于美国罗德岛博塔市,专门从事非线性有限元力学分析软件ABAQUS的开发与维护。
公司总部雇员400余人,其中近130余人具有工程或计算机博士学位,近120人具有硕士学位,被公认为世界上最大且最优秀的固体力学研究团体。
ABAQUS公司不断吸取最新的分析理论和计算机技术,领导着全世界非线性有限元技术的发展。
ABAQUS是国际著名的CAE软件,它以其强大的非线性分析功能以及解决复杂和深入的科学问题的能力赢得广泛称誉。
ABAQUS软件已被全球工业界广泛接受,并拥有世界最大的非线性力学用户群。
ABAQUS已成为国际上最先进的大型通用非线性有限元分析软件。
ABAQUS软件,除普通工业用户外,也在以高等院校、科研院所等为代表的高端用户中得到广泛。
研究水平的提高引发了用户对高水平分析工具需求的加强,作为满足这种高端需求的有力工具,ABAQUS软件在各行业用户群中所占据的地位也越来越突出。
ABAQUS是一个推崇技术的公司,它始终走在结构力学研究和软件化领域的前沿,它良好的品质和服务得到业界的广泛认可。
制造业是ABAQUS最重要的应用领域之一,拥有NASA、罗克希德-马丁、波音、空中客车等长期合作的用户。
对制造业很多复杂和特殊的问题,如热传导、爆炸冲击、流固耦合、疲劳断裂、复合材料损伤、接触连接、金属塑性等,在所有的CAE软件中,ABAQUS是最有优势的。
目前ABAQUS软件在中国的用户已超过800家,涵盖汽车、航空航天、船舶、武器、工程机械、建筑、电子、石化和核能源等各个领域,如宝山钢铁集团、长春一汽、上海泛亚、中国船级社、北京石化设计院、江钻股份、摩托罗拉和诺基亚等。
2、功能介绍ABAQUS软件的功能可以归纳为线性分析、非线性分析和机构分析三大块。
线性静力学、动力学和热传导o静强度/刚度、动力学和模态、热力学和声学等o金属和复合材料、应力、振动、声场、压电效应等∙非线性和瞬态分析o汽车碰撞、飞机坠毁、电子器件跌落, 冲击和损毁等o复合材料损伤、接触, 塑性失效, 断裂和磨损, 橡胶超弹性等∙多体动力学分析o起落架收放、副翼展开、汽车悬架、微机电系统MEMS、医疗器械等o结合刚体和柔体模拟各种连接件,进行运动过程的力学分析3、模块介绍ABAQUS软件主要由ABAQUS/CAE,ABAQUS/Standard,ABAQUS/Explicit三个模块组成。
ABAQUS+ALE自适应网格技术
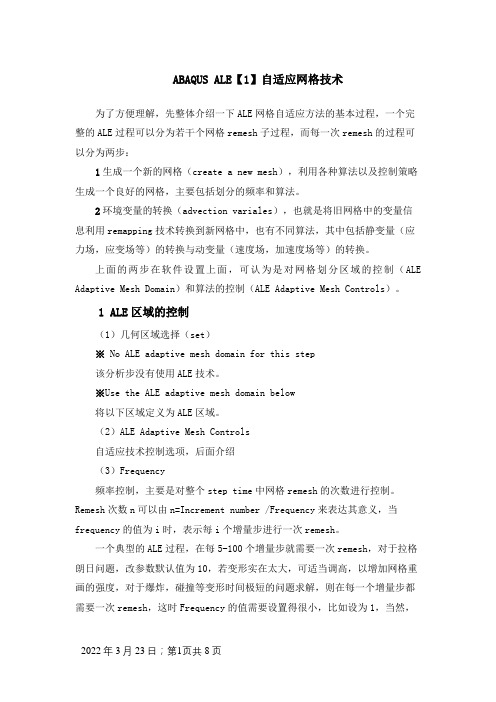
ABAQUS ALE【1】自适应网格技术为了方便理解,先整体介绍一下ALE网格自适应方法的基本过程,一个完整的ALE过程可以分为若干个网格remesh子过程,而每一次remesh的过程可以分为两步:1生成一个新的网格(create a new mesh),利用各种算法以及控制策略生成一个良好的网格,主要包括划分的频率和算法。
2环境变量的转换(advection variales),也就是将旧网格中的变量信息利用remapping技术转换到新网格中,也有不同算法,其中包括静变量(应力场,应变场等)的转换与动变量(速度场,加速度场等)的转换。
上面的两步在软件设置上面,可认为是对网格划分区域的控制(ALE Adaptive Mesh Domain)和算法的控制(ALE Adaptive Mesh Controls)。
1 ALE区域的控制(1)几何区域选择(set)※ No ALE adaptive mesh domain for this step该分析步没有使用ALE技术。
※Use the ALE adaptive mesh domain below将以下区域定义为ALE区域。
(2)ALE Adaptive Mesh Controls自适应技术控制选项,后面介绍(3)Frequency频率控制,主要是对整个step time中网格remesh的次数进行控制。
Remesh次数n可以由n=Increment number /Frequency来表达其意义,当frequency的值为i时,表示每i个增量步进行一次remesh。
一个典型的ALE过程,在每5-100个增量步就需要一次remesh,对于拉格朗日问题,改参数默认值为10,若变形实在太大,可适当调高,以增加网格重画的强度,对于爆炸,碰撞等变形时间极短的问题求解,则在每一个增量步都需要一次remesh,这时Frequency的值需要设置得很小,比如设为1,当然,adaptive remesh过程的强度也很高,也会很废时。
ABAQUS介绍
ABAQUS介绍最先进的大型通用非线性有限元分析软件——ABAQUS1、概述美国ABAQUS软件公司成立于1978年,总部位于美国罗德岛博塔市,专门从事非线性有限元力学分析软件ABAQUS的开发与维护。
公司总部雇员400余人,其中近130余人具有工程或计算机博士学位,近120人具有硕士学位,被公认为世界上最大且最优秀的固体力学研究团体。
ABAQUS公司不断吸取最新的分析理论和计算机技术,领导着全世界非线性有限元技术的发展。
ABAQUS是国际著名的CAE软件,它以其强大的非线性分析功能以及解决复杂和深入的科学问题的能力赢得广泛称誉。
ABAQUS软件已被全球工业界广泛接受,并拥有世界最大的非线性力学用户群。
ABAQUS已成为国际上最先进的大型通用非线性有限元分析软件。
ABAQUS软件,除普通工业用户外,也在以高等院校、科研院所等为代表的高端用户中得到广泛。
研究水平的提高引发了用户对高水平分析工具需求的加强,作为满足这种高端需求的有力工具,ABAQUS软件在各行业用户群中所占据的地位也越来越突出。
ABAQUS是一个推崇技术的公司,它始终走在结构力学研究和软件化领域的前沿,它良好的品质和服务得到业界的广泛认可。
制造业是ABAQUS最重要的应用领域之一,拥有NASA、罗克希德-马丁、波音、空中客车等长期合作的用户。
对制造业很多复杂和特殊的问题,如热传导、爆炸冲击、流固耦合、疲劳断裂、复合材料损伤、接触连接、金属塑性等,在所有的CAE软件中,ABAQUS是最有优势的。
目前ABAQUS软件在中国的用户已超过800家,涵盖汽车、航空航天、船舶、武器、工程机械、建筑、电子、石化和核能源等各个领域,如宝山钢铁集团、长春一汽、上海泛亚、中国船级社、北京石化设计院、江钻股份、摩托罗拉和诺基亚等。
2、功能介绍线性静力学、动力学和热传导o静强度/刚度、动力学和模态、热力学和声学等ooooo3、模块介绍金属和复合材料、应力、振动、声场、压电效应等非线性和瞬态分析汽车碰撞、飞机坠毁、电子器件跌落,冲击和损毁等复合材料损伤、接触,塑性失效,断裂和磨损,橡胶超弹性等多体动力学分析起落架收放、副翼展开、汽车悬架、微机电系统MEMS、医疗器械等结合刚体和柔体模拟各种连接件,进行运动过程的力学分析ABAQUS软件主要由ABAQUS/CAE,ABAQUS/Standard,ABAQUS/E某plicit三个模块组成。
abaqus最新经验总结(每天看一遍-一周后会有全新的认识)

abaqus最新经验总结(每天看一遍-一周后会有全新的认识)(共六页,每天看一遍,一周后会有全新的认识)一、认识总结1.快捷键:Ctrl+Alt+左键来缩放模型;Ctrl+Alt+中键来平移模型;Ctrl+Alt+右键来旋转模型。
2.A BAQUS/CAE 不会自动保存模型数据,用户应当每隔一段时间自己保存模型以避免意外丢失。
3.D ismiss 和Cancel 按钮的作用都是关闭当前对话框,其区别在于:前者出现在包含只读数据的对话框中;后者出现在允许作出修改的对话框中,点击Cancel 按钮可关闭对话框,而不保存所修改的内容。
二、建模总结1.A BAQUS/CAE 推荐的建模方法是把整个数值模型(如材料、边界条件、载荷等)都直接定义在几何模型上。
载荷类型Pressure 的含义是单位面积上的力,正值表示压力,负值表示拉力。
2.平面应力问题的截面属性类型是Solid(实心体)而不是Shell(壳)。
3.每个模型中只能有一个装配件,它是由一个或多个实体组成的,所谓的“实体”(instance)是部件(part)在装配件中的一种映射,一个部件可以对应多个实体。
材料和截面属性定义在部件上,相互作用(interaction)、边界条件、载荷等定义在实体上,网格可以定义在部件上或实体上,对求解过程和输出结果的控制参数定义在整个模型上。
4.A BAQUS/CAE 中的部件有两种:几何部件(native part)和网格部件(orphan mesh part)。
创建几何部件有两种方法:(1)使用Part 功能模块中的拉伸、旋转、扫掠、倒角和放样等特征来直接创建几何部件。
(2)导入已有的CAD 模型文件,方法是:点击主菜单File→Import →Part。
网格部件不包含特征,只包含节点、单元、面、集合的信息。
创建网格部件有三种方法:(1)导入ODB 文件中的网格。
(2)导入INP 文件中的网格。
(3)把几何部件转化为网格部件,方法是:进入Mesh 功能模块,点击主菜单Mesh→Create Mesh Part。
Lagrange、Euler、ALE三种方法的简单介绍
Lagrange、Euler、ALE三种方法的简单介绍ALE、Lagrange、Euler是数值模拟中处理连续体的广泛应用的三种方法。
Lagrange方法多用于固体结构的应力应变分析,这种方法以物质坐标为基础,其所描述的网格单元将以类似“雕刻”的方式划分在用于分析的结构上,即是说采用Lagrange方法描述的网格和分析的结构是一体的,有限元节点即为物质点。
采用这种方法时,分析结构的形状的变化和有限单元网格的变化完全是一致的(因为有限元节点就为物质点),物质不会在单元与单元之间发生流动。
这种方法主要的优点是能够非常精确的描述结构边界的运动,但当处理大变形问题时,由于算法本身特点的限制,将会出现严重的网格畸变现象,因此不利于计算的进行。
Euler方法以空间坐标为基础,使用这种方法划分的网格和所分析的物质结构是相互独立的,网格在整个分析过程中始终保持最初的空间位置不动,有限元节点即为空间点,其所在空间的位置在整个分析过程始终是不变的。
很显然由于算法自身的特点,网格的大小形状和空间位置不变,因此在整个数值模拟过程中,各个迭代过程中计算数值的精度是不变的。
但这种方法在物质边界的捕捉上是困难的。
多用于流体的分析中。
使用这种方法时网格与网格之间物质是可以流动的。
ALE方法最初出现于数值模拟流体动力学问题的有限差分方法中。
这种方法兼具Lagrange方法和Euler方法二者的特长,即首先在结构边界运动的处理上它引进了Larange方法的特点,因此能够有效的跟踪物质结构边界的运动;其次在内部网格的划分上,它吸收了Euler 的长处,即是使内部网格单元独立于物质实体而存在,但它又不完全和Euler网格相同,网格可以根据定义的参数在求解过程中适当调整位置,使得网格不致出现严重的畸变。
这种方法在分析大变形问题时是非常有利的。
使用这种方法时网格与网格之间物质也是可以流动的。
固体结构分析中一般都选用lagrange坐标,实际上lagrange euler法在有限元中体现的节点意义正如楼主所述,但是本质牵扯的是参考什么样的坐标来描述应力应变关系。
3.1.8在Abaqus-tandard中使用自适应网格的胎面磨损模拟
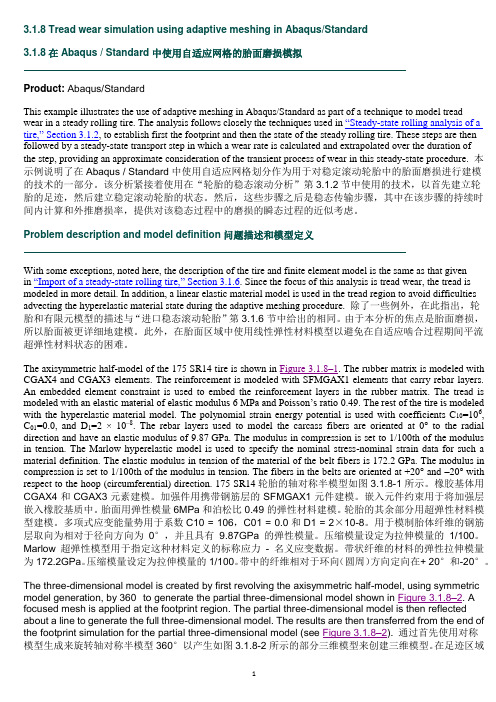
3.1.8 Tread wear simulation using adaptive meshing in Abaqus/Standard3.1.8在Abaqus / Standard中使用自适应网格的胎面磨损模拟Product: Abaqus/StandardThis example illustrates the use of adaptive meshing in Abaqus/Standard as part of a technique to model treadwear in a steady rolling tire. The analysis follows closely the techniques used in “Steady-state rolling analysis of a tire,” Section 3.1.2, to establish first the footprint and then the state of the steady rolling tire. These steps are then followed by a steady-state transport step in which a wear rate is calculated and extrapolated over the duration ofthe step, providing an approximate consideration of the transient process of wear in this steady-state procedure.本示例说明了在Abaqus / Standard中使用自适应网格划分作为用于对稳定滚动轮胎中的胎面磨损进行建模的技术的一部分。
该分析紧接着使用在“轮胎的稳态滚动分析”第3.1.2节中使用的技术,以首先建立轮胎的足迹,然后建立稳定滚动轮胎的状态。
ABAQUS网格划分技术选择原理详解

理解ABAQUS中重要的网格划分工具原理,尤其是理解ABAQUS里面的网格控制属性设置,这对于复杂网格划分尤其有用。
如图1,是ABAQUS中网格控制属性中的网格划分“技术”选项,它ABAQUS是决定采用何种策略划分网格的选项。
图1 ABAQUS网格控制属性对话框这几个选项看着挺简单,却很重要。
然而,关于这里的ABAQUS网格划分“技术”的解读,恰恰是很多教程缺失的内容。
理解这背后的技术原理直接影响着我们对复杂实体网格划分的切分策略!ABAQUS重要而常用的三种“自顶向下”的网格划分技术是:自由网格技术、结构网格技术、扫掠网格技术。
(1)自由网格技术,对于二维面几何来说,任何形状的面都能选择四边形、四边形为主和三角形;对于三维实体几何,只能生成四面体网格。
这很简单,如图2所示。
图2 ABAQUS自由网格划分技术(2)在ABAQUS的网格划分技术中,扫掠网格技术扮演着十分重要的角色。
首先是来自官方《ABAQUS文档》中的定义(翻译):扫掠网格先创建源网格,然后沿着扫掠路径的边,一次次地拷贝源网格节点,直到到达目标区域;后边还补充说明,如果扫掠路径的边是直线或样条线,称为拉伸扫掠,如果扫掠路径是圆(弧)线称为旋转扫掠。
这个定义显得有些笼统。
然而我们在实际使用中已经知道,这里的所谓“拷贝”是广义的,这里的所谓“沿着一条路径”也是广义的。
《ABAQUS文档》中分为二维和三维的场景,讨论了哪些形状可以扫掠,哪些形状不可以,这些内容才是对我们划分网格有指导意义的。
注意一个重要的要求是:对三维实体,目标面必须是单一的面。
这里我们引用ABAQUS官方文档的图例简单解释,如图3,图左边可以,而右边不行。
图3 ABAQUS扫掠网格的源面和目标面然而上述这个事实却不是针对曲面网格的,针对曲面网格必须是四边形才能做扫掠网格(并且不管四边形的边是直边还是曲边);而曲面网格对划分结构网格的几何要求反而放得更松一些,实际上,只要没有孔,几乎所有的连续面都可以是结构网格,有孔也没关系,做一下切分就可以。
ABAQUS+ALE自适应网格技术教学文案
A B A Q U S+A L E自适应网格技术ABAQUS ALE自适应网格技术为了方便理解,先整体介绍一下ALE网格自适应方法的基本过程,一个完整的ALE过程可以分为若干个网格remesh子过程,而每一次remesh的过程可以分为两步:1生成一个新的网格(create a new mesh),利用各种算法以及控制策略生成一个良好的网格,主要包括划分的频率和算法。
2环境变量的转换(advection variales),也就是将旧网格中的变量信息利用remapping技术转换到新网格中,也有不同算法,其中包括静变量(应力场,应变场等)的转换与动变量(速度场,加速度场等)的转换。
上面的两步在软件设置上面,可认为是对网格划分区域的控制(ALE Adaptive Mesh Domain)和算法的控制(ALE Adaptive Mesh Controls)。
1 ALE区域的控制(1)几何区域选择(set)※ No ALE adaptive mesh domain for this step该分析步没有使用ALE技术。
※Use the ALE adaptive mesh domain below将以下区域定义为ALE区域。
(2)ALE Adaptive Mesh Controls自适应技术控制选项,后面介绍(3)Frequency频率控制,主要是对整个step time中网格remesh的次数进行控制。
Reme sh次数n可以由n=Increment number /Frequency来表达其意义,当frequenc y的值为i时,表示每i个增量步进行一次remesh。
一个典型的ALE过程,在每5-100个增量步就需要一次remesh,对于拉格朗日问题,改参数默认值为10,若变形实在太大,可适当调高,以增加网格重画的强度,对于爆炸,碰撞等变形时间极短的问题求解,则在每一个增量步都需要一次remesh,这时Frequency的值需要设置得很小,比如设为1,当然,a daptive remesh过程的强度也很高,也会很废时。
5Abaqus中的分析步-接触-载荷
Introduction to Abaqus/CAE
Copyright 2007 Dassault Systèmes
接触
3. 编辑接触对话框中完成接触 定义(比如,为接触定义摩 擦模型)。
定义接触属性对话框
Introduction to Abaqus/CAE
Copyright 2007 Dassault Systèmes
分析步
• 分析步 • 分析步为描述模拟历程提供了一种方便的途径。 • 分析的结果取决于事件的顺序。 • 比如:下图中的弓和箭。整个分析过程包括四个分析步:
Step 3 = Natural frequency extraction
输出
• 模型中定义的输出要求延续到随后的分析步中。 • 在随后的分析步中输出请求可以被修改。
Introduction to Abaqus/CAE
Copyright 2007 Dassault Systèmes
场输出管理器
输出
• 重启动 (.res)文件需求: • 包含所有相关的输出量,用户只可以控制输出的频率。 • 重启动文件包含所有继续分析所需的信息,因此,它们可能非常大。 • 用于重新启动停止的分析过程。 • 可能引起程序终止的原因包括—硬盘空间不足、断电、正常和非正常 的分析结束、非线性分析不收敛等。 • 用于在ABAQUS/Standard和ABAQUS/Explicit之间传递数据。
分析控制
• 比如,在结构突变分析过程中,选定薄板拱形结构的中点进行监控。
Introduction to Abaqus/CAE
Copyright 2007 Dassault Systèmes
基于自适应结构网格的ALE方法研究
南京航空航天大学硕士学位论文基于自适应结构网格的ALE方法研究姓名:***申请学位级别:硕士专业:流体力学指导教师:***20070101南京航空航天大学硕士学位论文摘要在计算流体力学(CFD)界面追踪问题的数值模拟中,ALE (Arbitrary Lagrangian-Eulerian)方法是目前国内外普遍应用的方法之一。
这类方法由于涉及到Lagrange坐标系下计算网格的变形问题,目前的研究工作主要包括Lagrange坐标系下有限体积格式的构造和针对计算网格变形的守恒重映及网格重分问题。
本文研究了一类新的ALE方法,主要进行了Lagrange网格下的有限体积格式的构造、积分守恒重映格式的构造和自适应结构网格的生成三方面的工作,相关内容如下:1、从积分形式的二维Lagrange流体力学方程组出发,采用已经在Euler方程求解中得到成功运用的高精度ENO(Essentially Non-oscillatory)有限体积格式的构造思想,推导了一类Lagrange 网格下的有限体积格式;2、分别介绍了一类基于单元相交和基于面通量的守恒重映格式。
然后通过WENO(Weighted Essentially Non-oscillatory)插值多项式重构密度分布的思想构造了一类基于WENO插值的守恒重映算法。
最后通过一组算例验证了算法的可行性,并分析了算法的精度;3、给出了一种结构网格的生成方法和两类网格自适应方法:自适应加密网格方法(Adapative Mesh Refinement)和自适应运动网格方法(Moving Mesh Method)。
由于在网格自适应方法中,涉及到新网格上物理量的重构,这需要满足守恒性和单调性的要求,本文把积分守恒重映格式应用到网格的自适应方法中,并在最后给出了算例,验证了该方法的有效性。
作者分别编写了三个部分的程序模块,最后把这三部分串联起来运行,形成了一类新的ALE方法。
ABAQUS的高速铣削二维仿真分析
粪懈絮450酗瓦
刚。:丽而巧e墨.1.∥¨帅瓦
出&厂上_面々万—如。长&广上_百々万—d80
txl0—3/s
txlO一'/s
a)v=lOOOm/s时
b)v=1200m/s时
图6不同切削速度时的切削力
5 结语
高速铣削仿真分析是一个高度的非线性问题,通 过ABAQUS仿真分析验证了本文建立的有限元模型 的合理性,用该模型模拟高速铣削过程,避免了传统 解析法和试错法研究高速铣削过程费时、费力和周期 长等缺点,并为建立三维高速铣削模型奠定了基础。
变;奎’为量纲(应变率),奎+=矽/8‘。;扩为有效塑性应
变率;毒。为参考塑性应变率,一般取童。=ls~;T‘为量
纲(温度),T’=(丁一z)/(L—z),z为参考温度, J—C强度模型中的材料 参数,在ABAQUS/Explicit的材料编辑(edit material) 里定义工件的塑性(plasticity)。 2.2切屑和工件的分离准则
(surface.to.surface contact),类型为运动学接触方法 (kinematic contact method)。在接触对上分为黏着摩擦 区和滑动摩擦区,等效剪切应力与正压力的关系类似于 不考虑加工硬化时的弹塑性关系。当达到等效剪切应 力上界孑一的时候发生滑动摩擦,上界的合理估计值
GB7713--1987((科学技术报告、学位论文和学术论文的编写格式》中,有关撰写题名的要求包括:1)题名中 应避免使用不常见的缩略词、首字母缩写字、字符、代号和公式等;2)题名一般不宜超过20字;3)论文作为国际 交流,应有外文(多用英文)题名,外文题名一般不宜超过10个实词。
应当说明,《现代制造工程》是国内外发行,要求有英文题名。
CAD/CAE/CAPP/CAM
abaqus部分名词定义及解释
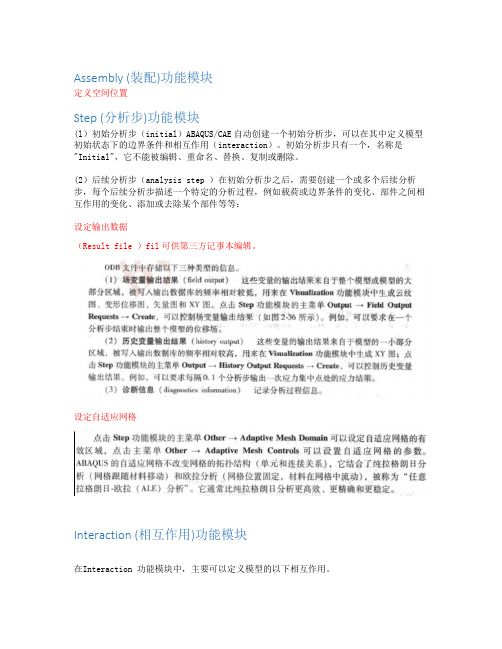
Assembly (装配)功能模块定义空间位置Step (分析步)功能模块(l)初始分析步(initial)ABAQUS/CAE自动创建一个初始分析步,可以在其中定义模型初始状态下的边界条件和相互作用(interaction)。
初始分析步只有一个,名称是"Initial",它不能被编辑、重命名、替换、复制或删除。
(2)后续分析步(analysis step )在初始分析步之后,需要创建一个或多个后续分析步,每个后续分析步描述一个特定的分析过程,例如载荷或边界条件的变化、部件之间相互作用的变化、添加或去除某个部件等等:设定输出数据(Result file )fil可供第三方记事本编辑。
设定自适应网格Interaction (相互作用)功能模块在Interaction 功能模块中,主要可以定义模型的以下相互作用。
1.Interaction 定义模型的各部分之间或模型与外部环境之间的力学或热相互作用,例如接触、弹性地基、热辐射等。
2.Constraint 定义模型各部分之间的约束关系。
3.Connector 定义模型中的两点之间或模型与地面之间的连接单元( connector),用来模拟固定连接、钱接、恒定速度连接、止动装置、内摩擦、失效条件和锁定装置等。
4.Special → Inertia 定义惯量(包括点质量/惯量、非结构质量和热容)。
5.Special → Crack 定义裂纹。
6.Special → Springs/Dashpots定义模型中的两点之间或模型与地面之间的弹簧和阻尼器。
7.主菜单Tools 常用的菜单项包括Set (集合)、Surface (面)和AlE\plitude (幅值)等。
说明:接触即使两实体之间或一个装配件的两个区域之间在空间位置上是互相接触的,ABAQUS/CAE 也不会自动认为它们之间存在着接触关系,需要使用interaction模块中的主菜单Interacton 来定义这种接触关系。
lecture10-AbaqusExplicit中的准静态分析
• 在显式板金成型模拟过程中,过大的工具速度将抑制起皱现象, 并激起非真实的局部拉伸。
• 在屈曲成型过程中,过大的工具速度将引起“喷注”效应—水动 力学响应(下页中有图形)。
Introduction to Abaqus/Standard and Abaqus/Explicit
Introduction to Abaqus/Standard and Abaqus/Explicit
质量缩放
• 显式动力学过程稳定极限的估计公式为
Le t c d
• 泊松比为 • 材料的膨胀波速为
,
其中 Le 是最小的特征单元长度, cd 是材料的膨胀波速。
cd
载荷速率
喷注 • 考虑下面的屈曲成型过 程(轴对称模型180 的 截面)。 • 当工具速度非常大时, 产生高度局部化的变形 (喷注)。
工具速度 = 500 m/s 喷注
工具速度对变形形状的影响
工具速度 = 10 m/s
Introduction s/Explicit
• 动能是可以忽略的。 • 当测试的速度增加以后: • 试件的响应偏离静态、趋于动态。 • 因此,材料速度和动能更加明显。
准静态拉伸测试的能量历程
Introduction to Abaqus/Standard and Abaqus/Explicit
能量平衡
• 因此,能量检查为Abaqus/Explicit金属成型过程的结果是否反应了准静态解 提供了另外的评估方法。
简介
• 显式方法是真正的动力学过程。它最初用于模拟高速碰撞问题。 • 它用于求解结构的动力平衡状态。
• 在求解过程中,惯性力起到决定性的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABAQUS ALE自适应网格技术
为了方便理解,先整体介绍一下ALE网格自适应方法的基本过程,一个完整的ALE过程可以分为若干个网格remesh子过程,而每一次remesh的过程可以分为两步:
1生成一个新的网格(create a new mesh),利用各种算法以及控制策略生成一个良好的网格,主要包括划分的频率和算法。
2环境变量的转换(advection variales),也就是将旧网格中的变量信息利用remapping技术转换到新网格中,也有不同算法,其中包括静变量(应力场,应变场等)的转换与动变量(速度场,加速度场等)的转换。
上面的两步在软件设置上面,可认为是对网格划分区域的控制(ALE Adaptive Mesh Domain)和算法的控制(ALE Adaptive Mesh Controls)。
1 ALE区域的控制
(1)几何区域选择(set)
※ No ALE adaptive mesh domain for this step
该分析步没有使用ALE技术。
※Use the ALE adaptive mesh domain below
将以下区域定义为ALE区域。
(2)ALE Adaptive Mesh Controls
自适应技术控制选项,后面介绍
(3)Frequency
频率控制,主要是对整个step time中网格remesh的次数进行控制。
Reme sh次数n可以由n=Increment number /Frequency来表达其意义,当frequenc y的值为i时,表示每i个增量步进行一次remesh。
一个典型的ALE过程,在每5-100个增量步就需要一次remesh,对于拉格朗日问题,改参数默认值为10,若变形实在太大,可适当调高,以增加网格重画的强度,对于爆炸,碰撞等变形时间极短的问题求解,则在每一个增量步都需要一次remesh,这时Frequency的值需要设置得很小,比如设为1,当然,ada
ptive remesh过程的强度也很高,也会很废时。
对于其他变形不是很剧烈的问题求解,该参数值可以适当调高。
对于欧拉问题,默认值为1。
图1 Frequency的设置
(4)Remeshing sweeps per increment
一个频率下的迭代次数,当该参数的值为n时,每一个remesh过程将对网格进行n次sweep,其实这个参数可以理解为对整个adaptive remesh过程的每一个子过程(remesh过程)的强度进行控制。
那么,我们先来理解一下sweep的概念,每sweep一次,abaqus将利用我们设置好的算法(体积算法,拉普拉斯算法或等位算法)生成一套新的网格,但这个网格不一定是符合要求的,因此,需要在生成的新网格的基础上用同样的方式再进行sweep,就像我们求解方程时迭代的概念是一样的。
就这样一直sweep 下去直到sweep的次数达到mesh sweeps参数的值,这样就完成了一个remesh 过程中的新网格的生成。
同样,mesh sweeps参数的值越高,adaptive remesh 过程强度越高,网格优化的状况良好的机率也就越大。
图2 Remeshing sweeps per increment的设置
(5)Initial remeshing sweeps
也就是ALE过程开始之前对网格的一个优化,概念与mesh sweeps类似,因为我们有可能利用已经变形的很厉害的网格进行分析,这时,在分析开始之前,就需要对网格进行重画。
图3 Initial remeshing sweeps的设置
2 ALE过程的控制
算法控制包括两部分;一为网格算法控制;其二为变量转换算法控制。
(1)Priority
也就是指网格梯度控制(是否保持初始网格梯度,若需要保持初始网格梯度,则对网格的质量将会有影响)。
※Improve aspect ratio
在计算过程中将考虑到网格单元高宽比的改善,不考虑对初始网格梯度的保持。
※Preserve initial mesh grading
在计算过程中保证初始的网格梯度,但不会考虑到网格宽高比的改善。
图4 Priority的设置界面
(2)smoothing algorithm
※Use enhanced algorithm based on evolving element geometry
主要是在几何学的方面对我们定义的网格sweep算法(前面提到的三种算法)进行增强,目的是为了保证adaptive remesh过程的健壮性,为推荐选项,选它就行了
※ conventional smoothing
利用我们定义好的算法进行计算,无几何增强。
图5 smoothing algorithm的界面控制
(3)Meshing Predictor
也就是网格节点位置控制(理想的网格节点位置控制,将会减少需要的网格sweeps次数,减少资源浪费)。
※Current deformed position
对于拉格朗日问题选择
※Position from previous adaptive mesh increment
对于欧拉问题选择
图6 Meshing predictor的界面控制
(4)Curvature refinement
也就是曲率较大的曲线曲面边界的网格密度控制,默认为1,该值越大,则圆角区的网格密度也就会越大,比较简单。
图7 Curvature refinement的界面控制
(5)Weights
在ABAQUS中是如何生成新网格的呢?即使用网格扫掠技术(mesh sweep technique),每sweep一次,生成一套新的网格。
但是当你使用的算法不同时,sweep出来的网格也是不同的。
在ABAQUS显示模块中,sweep算法用英语来说就是mesh smoothing method,有三种算法来sweep网格,如下所示;
※体积算法(volume smoothing)
该算法十分健壮,为默认算法,再绝大多数情况下适用
※拉普拉斯算法(laplacian smoothing)
耗费资源最少的算法,能力一般,作用与体积算法类似(一阶算法,类似于求平均值),对于曲率比较高的曲线曲面边界时,效果不是很理想。
※等位算法(equipotential smoothing)
比较复杂的算法,是基于拉普拉斯算法的解之上的算法,对曲率较大的曲线曲面边界效果较好,在节点被非结构化网格包围时,次算法为推荐算法,若节点被结构化网格包围,其效果与体积算法类似。
三种算法可以结合适用,利用权重值来定义,需要记住的是,三种算法各占的权值加起来必须等于1。
图8 Remesh网格重画的算法控制
(6)Boundary Region Smoothing
边界区域平滑主要包括以下几个参数设置:
※ initial feature angle
≤180),当两个相邻的面的法向量大于该角即初始检测角度的设置(0≤θ
I
度值的时候,这两个相邻面形成的corner将被检测出来,在sweep时,网格不允许通过这个corner。
小于的话就说明,该corner足够圆滑,网格可以通过,当然,该corner应该是具有活性的,对corner活性的控制由下面一个参数(Transition feature angle)控制,否则也不会被考虑。
※ Transition feature angle
控制被检测出的corner(0≤θ
≤180)是活性的,如果被检测处的corner
T
的两面法线夹角大于该值则该corner,在ale过程中是会被考虑的,否则就不会考虑。
※ Mesh constraint angle
≤85),一般大于45度,设为默认值控制分析过程的一个角度参数(5≤θ
C
就可以,在分析过程中,当网格内某一个角度大于该参数值时,分析终止,文档有详细介绍。
图9 Boundary Region Smoothing的设置
(7)Advection
在ABAQUS中是如何将旧网格中的环境变量转换到新网格中的呢?
即使用remapping技术,对于静变量(应力场,应变场,位移场等)的转换(advection),有两种算法即为一阶算法(first order)与(second order)算法,second order算法适用于所有问题,为推荐算法,一阶算法比较简单,占资源少,速度快;对于动变量(速度,加速度等)转换(momentum advection),也有两种算法,element center projection method与half-index shift method,前者为推荐算法,选择前者就ok了,如果想仔细研究,查查ABAqus文档就可以了,里面写的很清楚。
图10 Advection的控制。