东方马达选型手册
东方马达 数据设定器OPX-2A AR系列(内藏定位功能型)使用说明书HM-60048-2B-P40

−6−
3.6 OPX-2A 的基本操作
使用
操作流程
gヺো
+
-
K
L
W
Y
3.4 LED 显示部的阅读方法
模式改变、发生 Alarm 或 Warning 时,LED 亮灯。 另外,电动机运行中、编辑锁定功能有效时,LED 也会亮灯。
খ᭄ᓣᯊ҂♃ ᭄ᓣᯊ҂♃ ⲥ㾚ᓣᯊ҂♃
⌟䆩ᓣᯊ҂♃ ࠊᓣᯊ҂♃ Փ⫼
থ⫳Alarmᯊ҂♃ থ⫳Warningᯊ҂♃ ⬉ࡼᴎ䖤㸠ᯊ҂♃
打开包装箱后,请确认下述物品是否齐全。若有缺件或破损,请与欧立恩拓电机商贸(上海)有限公司联系。
• OPX-2A .......................................................1 台 • OPERATING MANUAL(CD-ROM) ......1 张 • 相关资料 ......................................................1 本
?设置在室内的机框内请开设通风口?使用环境温度040c无结冰?使用环境湿度85以下无结露?无爆炸性环境有害气体硫化气体等及液体?无直射阳光照射?尘埃铁粉等较少?不会沾染水雨或水滴油油滴及其它液体?盐份较少?没有连续性振动或过度冲击?电磁干扰少如焊接机动力机器等?无放射性物质或磁场等非真空环境?海拔1000m以下42设置方法请使用板厚为13mm的金属板从安装孔的前端插入opx2a并确实固定
7 数据模式 ........................................... 20
7.1 数据模式的操作 ..................................... 20 7.2 设定项目 ................................................ 21 7.3 设定例.................................................... 22 7.4 指定运行数据的初始化 .......................... 23 7.5 所有运行数据的初始化 .......................... 23
东方马达软件使用说明

※水平驱动(0°)、垂直驱动(90°)
【返回】
返回机构选择画面。此时,项目中所输入的数值将被清零。
【下一步】
进入到运行条件输入画面。当输入项目不足或输入值非法时,会显示提示信息,不 会进入下一步画面。
9
【输入皮带参数】
黄色项目请务必输入。需要输入的项目如下。
【传动机构】
【输入螺杆参数】
黄色项目请务必输入。需要输入的项目如下。
【传动机构】
选择无或有。
无: 电动机和螺杆直接连接时。 有: 通过齿轮、滑轮等进行电动机和螺杆连接时。直接输入减速比(In/Out)和效率。
例: 输入 100〔r/min〕/50〔r/min〕→2 50〔r/min〕/100〔r/min〕→0.5。
Windows 7 Home Basic/Home Premium/Professional/Ultimate/Enterprise(SP1 以上)
* CPU 500MHz 以上(Windows XP Home Edition/Professional) 800MHz 以上 32-bit(x86)或者 64-bit(x64)
① 在本公司主页下载或通过CD-ROM安装的应用程序请保存在任意文件夹。 ② 请将下载文件解压。 ③ 解压后请双击「Setup.exe」文件,并按提示进行安装。
【卸载方法】
请从控制面板中的“卸载程序”执行卸载(XP 系统:“添加或删除程序”)。
【起动方法】
从[开始]菜单,按照[程序]→[ORIENTAL MOTOR]→[电动机选型软件]的顺序,选择 起动。
(参照第 4 项 常数ɾ 一般值一览)
【质量】
滑轮计算中选择了质量时,输入每个滑轮的质量。
东方马达选型手册

"直動型
馬達內部採用軸向軸承機構,亦可與安裝滾珠螺桿的直動型組合。 詳情請洽本公司或客戶諮詢中心 (0800)060708。
RoHS 指令對應品
設定軟體(MEXE02)使用。
◇◇可對應的網路及網路轉換器品名
可對應的網路
CC-Link MECHATROLINK-II MECHATROLINK-III
網路轉換器品名
NETC01-CC NETC01-M2 NETC01-M3
༟ࣘண֛ኜ
༟ࣘண֛ኜ
OPX-2A㧔̤ਯ MEXE02㧔̤ਯ
א
56ஷৃ
ᇜᇁኜ ࠇᅰኜ
$㕟%
৵༺ ᇜᇁኜ
ˢ༰
ࢨମ੬೯͛
67(3287፩̈
$/$50፩̈
ᙆѓ፩̈
●●STEPOUT 輸出功能
驅動器的指令位置與編碼器計數器值之間的偏差達到設定值(偏差 異常)時,將輸出STEPOUT信號。可檢知因負載的急速變化等而產 生的位置差距。
●●ALARM 輸出功能 ✽ 若發生偏差異常,將輸出「位置偏差過大」ALARM,使馬達停止。
◇◇用於位置計算 計算輸出的信號,即可確認對馬達的指令位置。
●●群組傳送功能(僅限 RS-485 通訊)
可由 RS-485 通訊中連接的複數軸構成群組,以群組為單位,傳 送指令。 亦可實現複數軸的同時起動和同一動作。
༶ᔷܸ˿ RS-485ஷৃ
0ዚ㕐֛З༶ᔷක
0ዚ˴ൿٙ ৵༺ਗЪ
1ዚൿٙ ৵༺ਗЪ
●●具平滑驅動功能,易於使用
平滑驅動功能係指利用與全步級相同的設定進行自動微步級驅動的 控制。
ࣈਗतˢ༰
1.5 CSK566AP 0.72ࠑ/step CRK566AKD 0.072ࠑ/step㧔ฆӉॴᚨਗ㧕
东方马达 BLV系列_datasheet

11
最大輸入電流
A
25
18
額定轉矩 起動轉矩 ✽1
N·m
0.65
1.3
N·m
1.15
1.8
額定轉速
r/min
3000
速度控制範圍
圓軸型的容許負載慣性慣量
轉子慣性慣量
對負載
速度變動率
對電壓
對溫度
r/min
J×10-4kg·m2 J×10-4kg·m2
100∼4000(類比設定時) 80∼4000(數位設定時 以 1r/min 單位設定)✽2
④ 電源電壓
K:DC24V N:DC48V
⑤ M:附電磁剎車型 無:標準型
減速比.出力軸形狀 ⑥
數字:平行軸減速機型 減速比 5∼200
中空軸扁平式減速機 減速比 5∼100
A:圓軸型
⑦
減速機的種類 (僅限裝配型)
S:平行軸減速機 F :中空軸扁平式減速機
⑧ 電纜線長度(附件)
1:1m 2:2m 3:3m
輸出 安裝尺寸 電源電壓
馬達類型
標準型 附電磁剎車型
200W □104mm
DC24V ● ●
400W □104mm
DC48V ● ●
裝配型.平行軸 減速機
裝配型.中空軸 扁平式減速機
圓軸型
●●搭載便於電池驅動的功能 ##即使電池電壓降低,亦可驅動 ##警告輸出通知電池電壓降低
●●備有附電磁剎車型 附電磁剎車型適用於停止時的位置保持和捲下運轉。請注意用於 上下驅動(捲下運轉)時有電源限制。
品名 BLV620KA-◇ BLV640NA-◇
產品包含以下項目。 馬達、驅動器、連接電纜線 ✽、電源用連接器、使用說明書 ✽✽附送 1m、2m、3m 其一。
东元马达如何选型手册

普 通 鼠 龍 型
特 殊 鼠 龍 型
高 特 指 依 起 殊 定 標 動 用 準 轉 途 矩 定 遞 定 遞 輸 減 輸 減 出 輸 出 轉 出 矩 21
FA Shanghai
常見故障原因和處理方法
东莞富创工业自动化设备有限公司
常見故障 一
故障种类 故障现象
完全不动且 无声
T 軸轉矩 N 2 軸轉速
2
2
P 軸功率 N 3 軸轉速
3
FA Shanghai
15
變頻馬達-強冷扇
FA Shanghai
16
東元電機規范表&外型圖
详见1
详见2
FA Shanghai
17
常用馬達簡介-其它
雙速馬達 剎車馬達 船用馬達 EDVS電磁調速馬達
FA Shanghai
FA Shanghai
Australian, New Zealand效率
FA Shanghai
6
變頻馬達
通過變頻器實現電機平滑起動并控制電機運轉速度
R,S,T
U,V,W
FA Shanghai
7
變頻馬達-電源
INVERTER和一般商用電源比較
電源 頻率
50 or 60HZ (固定)
電壓波形
電壓突波
MAX-E1
AEHM AEHJ JIS 4212 AEHB CEMEP eff1
2006Min. Eff
PREMIUM
CNS/JIS
AEMB
2006 Hi-Eff
AS/BS
NOMINAL
GB
CEMEP eff2
AEEV1H AEJE AEAV1H 中國能效1 能效 2級= 級 CEMEP eff1
ORIENTALMOTOR日本东方马达及驱动选型RKSeries

ORIENTALMOTOR⽇本东⽅马达及驱动选型RKSeries RoHS-Compliant5-Phase Stepping Motor and Driver Package RK SeriesⅷStandard Type ⅷTH Geared TypeⅷPL Geared Type ⅷPN Geared TypeⅷHarmonic Geared Type2RoHS-Compliant5-Phase Stepping Motor and Driver PackageRK SeriesThe RK Series incorporates new functions and state-of-the-art technologies to achieve the ultimate use of a control motor. The seriesoffers various types including the standard type, electromagnetic brake type, IP65 rated motor type, and four geared types. Three frame sizes of 42 mm, 60 mm and 85 (90) mm are available. The wide range of motor variations and affordable prices make the RK Series a perfect solution for your various applications.ⅥFeaturesv bz Smooth Drive FunctionThe smooth drive function ensures low-vibration andlow-noise operation at low speeds by internally executing microstepping within the driver, working independently of the inputpulse frequency of your controller.V i b r a t i o n C o m p o n e n t V o l t a g e V p -p [V ]Speed [r/min]The smooth drive function of the RK Series improves the settling performance.S p e e d [r /m i n ]S p e e d [r /m in ]Conventional Model RK (Smooth Drive: ON)100 ms/div100 ms/divStep Angle: 0.72?/stepStep Angle: 0.72?/stepx Microstep Drive SystemThe motor's basic step angle is divided by a maximum of 1/250 without the use of a reduction mechanism or other mechanical elements. 16 resolution levels are available to set the desired resolution. This enables fine positioning and the further reduction of vibration and noise. A motion sequence of "low-speed transfer ? high-speed return" can easily be performed without the need for changing from a microstep pulse frequency to a full step pulse frequency. The RK Series can also be used in full-step operation.c 100-115 VAC, 200-230 VAC Power Source Variation The RK Series can be used with most common power supplies available around the world.They also comply with the international standards, ensuring safe operation.v Improved Angle AccuracyAngle accuracy may decrease during use of microstep drivers, due to the effect of current control. However, the drivers used in the RK Series are designed to ensure that the motor operates at maximum accuracy.A n g l e E rr o r [d e g ]0.0720.036-0.072-0.036Power Supply Voltage: 100-115 VAC b Improved ResponseThe RK Series, with its high starting frequency, shortens the machine cycle without affecting acceleration/deceleration rates. This produces a significant savings in time for an operation in which the same cycle is repeated thousands of times each day.Rise Time [ms]S p e e d [r /m i n ]3Features Line-upSystem ConfigurationProduct LineSpecifications and Characteristics DimensionsConnection and Operation List of Motor and Driver CombinationsAccessoriesBefore Using a Stepping MotorControllersⅷEnvironmentally Friendly Energy-Saving Mode In the energy-saving mode, the supply of current to the motor is stopped and the load is held only with the electromagnetic brake while the motor remains at a standstill. Stopping the supply of current to the motor extends the motor life by limiting the consumption of energy.(Available only with electromagnetic brake type)P o w e r C o n s u m p t i o n [k W ]Automatic Current-Cutback Modein Energy-Saving ModeComparison of Annual Power Consumption at ⅷSafe Operation in Major Countries around the World Compliance with Safety StandardsThe RK Series complies with the UL/CSA and ENstandards. (With the RK54Ⅺ type, only the driver conforms to the CSA standard.) The CE marking certifies compliance with the EMC Directive and Low-Voltage Directive.Additionally, the RK Series conforms to the EMC Directive only through its use of surge arrester. The RK Seriesdoesn't require an external ferrite core or filter in the motor line or power line.ⅷProtective Earth Terminal(Excluding motors with a frame size of 42 mm)The life of a motor is affected by its bearing. The RK Series achieves approx. twice the life of a conventional motor by adopting a modified bearing. (Available only with the standard type and standard electromagnetic-brake type with a frame size of 60 or 85 mm.)ⅷNew IP65 Rated Motor Conforming to the IP65 Standard for Ingress Protection against Dust and WaterTerminal-Block Connection DesignThe motor can be wired directly from its terminal block.No Motor/Driver RelaySince the motor cable can be connected directly with the driver terminals, there is no need for wire connection orsoldering on a relay terminal block.DriverRoHS-CompliantThe RK Series conforms to the RoHS Directive thatprohibits the use of six chemical substances including lead and cadmium.ⅥWide VarietyThe RK Series offers a range of motor frame sizes depending on the motor type and power supply voltage specification, as shown below.□ⅷStandard Type/Standard Type IP65 Rated MotorEasy-to-use standard types offer balanced performance. The IP65 rated motor conforms to the IP65 standard for ingress protectionagainst dust and water.ⅷStandard Type with Electromagnetic BrakeA motor combines with power off activated type electromagnetic brake.TH Geared Type (Low backlash)A low-cost geared motor offers low backlash.ⅷPL Geared Type (Low backlash)A geared motor offers low backlash, high strength and wide gear ratios.ⅷPNGeared Type (Non-backlash)A high-accuracy geared motor achieves a backlash of 3 arc minutes or less. It also provides high strength and wide gear ratios.Harmonic Geared Type(Non-backlash)A high-accuracy, backlash-free geared motor adopts a newly developed harmonic gear. It ensures high strength in a compact body.45FeaturesLine-upSystem ConfigurationProduct LineSpecifications and CharacteristicsDimensionsConnection and Operation List of Motor and Driver Combinations Accessories Before Using a Stepping Motor ControllersTH (Parallel Shaft)PL (Harmonic Drive)ⅥSystem ConfigurationAn example of a system configuration with the SG8030 Series controller.Mounting Brackets (Accessories)Connector-Terminal BlockDriverⅷThe system configuration shown above is an example. Other combinations are available.67Features Line-upSystem ConfigurationProduct LineSpecifications and CharacteristicsDimensionsConnection and Operation List of Motor and Driver CombinationsAccessoriesBefore Using a Stepping Motor ControllersⅥProduct Number Codeqw e r t y u io !0RK 5 6 6 B A E - N 5Series RK :RK Series 5: 5-PhaseMotor Frame Size 4: 42 mm6: 60 mm 9: 85 mm (90 mm sq. for Geared Type)Motor Case LengthMotor Shaft Type A : Single Shaft B : Double ShaftElectromagnetic Brake Blank : Without Electromagnetic Brake M : With Electromagnetic Brake Power Supply Voltage A : Single-Phase 100-115 VAC C : Single-Phase 200-230 VAC Motor Classi? c ation TypeBlank : Standard Type T :TH Geared TypeP :PL Geared Type N :PN Geared Type H : Harmonic Geared TypeGear RatioⅥProduct Line89 Features Line-up System ConfigurationProduct LineSpecifications and CharacteristicsDimensionsConnection and Operation List of Motor and Driver CombinationsAccessoriesBefore Using a Stepping Motor ControllersStandard Type Motor Frame Size 42 mmⅥSpecificationsⅷWith the RK54Ⅺ type, only the driver conforms to the CSA standard.RK543AA RK544AA RK545AA RK543BA RK544BA RK545BAHow to Read Specifications Table ?See the following descriptions.Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.ⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK543AA/RK543BAPulse Speed [kHz](0)(300)(200)(100)(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]132Current: 0.75 A/Phase Step Angle: 0.72?/step 2RK544AA/RK544BAPulse Speed [kHz]0(0)30(300)20(200)10(100)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]132Current: 0.75 A/Phase Step Angle: 0.72?/step 2RK545AA/RK545BAPulse Speed [kHz]0(0)30(300)20(200)10(100)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]132Current: 0.75 A/Phase Step Angle: 0.72?/step 2ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Be sure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)ⅷWhen using the motor with the dedicated driver, the driver’s automatic current cutback function at motor standstill reduces maximum holding torque by approximately 50%.ⅥHow to Read Specifications TablePlease read the following information before examining the specifications on pages 9 to 23.10Standard Type Motor Frame Size 60 mm, 85 mmHow to Read Specifications Table ?Page 9Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.ⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK564ⅪAE RK564ⅪCEPulse Speed [kHz]0(0)10(100)20(200)30(300) Speed [r/min]T o r q u e [N ?m ]Resolution 1(Resolution 10)C u r r e n t [A ]462Current: 1.4 A/Phase Step Angle: 0.72?/step 2RK566ⅪAE RK566ⅪCEPulse Speed [kHz](0)10(100)20(200)30(300) Speed [r/min]T o r q u e [N ?m ]Resolution 1(Resolution 10)C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2RK569ⅪAE RK569ⅪCEPulse Speed [kHz]0(0)10(100)20(200)30(300) Speed [r/min]T o r q u e [N ?m ]Resolution 1(Resolution 10)C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2ⅷEnter A (Single shaft) or B (Double shaft) in the box (Ⅺ) within the model name.ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Be sure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)ⅷWhen using the motor with the dedicated driver, the driver’s automatic current cutback function at motor standstill reduces maximum holding torque by approximately 50%.RK596ⅪAE RK596ⅪCEPulse Speed [kHz](0)(100)(200) Speed [r/min](Resolution 10)T o r q u e [N ?m ]C u r r e n t [A ]510Current: 1.4 A/Phase Step Angle: 0.72?/step 2 RK599ⅪAE RK599ⅪCEPulse Speed [kHz]Speed [r/min](Resolution 10)(0)(50)(100)T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2 RK5913ⅪAERK5913ⅪCEPulse Speed [kHz](0)(50)(100) Speed [r/min](Resolution 10)T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2 11FeaturesLine-upSystem ConfigurationProduct LineSpecifications and Characteristics DimensionsConnection and Operation List of Motor and Driver CombinationsAccessoriesBefore Using a Stepping Motor ControllersStandard Type IP65 Rated Motor Motor Frame Size 60 mm, 85 mmⅥSpecificationsHow to Read Specifications Table ?Page 91Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.2Excluding the gap between the shaft and the flangeⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK564AAT/RK564ACTPulse Speed [kHz]0(0)10(100)20(200)30(300)Speed [r/min]T o r q u e [N ?m ]Resolution 1(Resolution 10)C u r r e n t [A ]462Current: 1.4 A/Phase Step Angle: 0.72?/step 2RK566AAT/RK566ACTPulse Speed [kHz]0(0)10(100)20(200)30(300) Speed [r/min]T o r q u e [N ?m ]Resolution 1(Resolution 10)C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2RK569AAT/RK569ACTPulse Speed [kHz]0(0)10(100)20(200)30(300) Speed [r/min]T o r q u e [N ?m ]Resolution 1(Resolution 10)C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Be sure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)ⅷWhen using the motor with the dedicated driver, the driver’s automatic current cutback function at motor standstill reduces maximum holding torque by approximately 50%.RK596AAT/RK596ACTPulse Speed [kHz]0(0)10(100)20(200) Speed [r/min]Resolution 1(Resolution 10)T o r q u e [N ?m ]C u r r e n t [A ]510Current: 1.4 A/Phase Step Angle: 0.72?/step2RK599AAT/RK599ACTPulse Speed [kHz]Speed [r/min]Resolution 1(Resolution 10)0(0)5(50)10(100)T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2RK5913AAT/RK5913ACTPulse Speed [kHz]0(0)5(50)10(100) Speed [r/min]Resolution 1(Resolution 10)T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 212Standard Type with Electromagnetic Brake Motor Frame Size 42 mm ⅥSpecificationsⅷWith the RK54Ⅺtype, only the driver conforms to the CSA standard.How to Read Specifications Table ?Page 9Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.ⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK543AMAPulse Speed [kHz]0(0)30(300)20(200)10(100)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]132Current: 0.75 A/Phase Step Angle: 0.72?/step 2RK544AMAPulse Speed [kHz]0(0)30(300)20(200)10(100)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]132Current: 0.75 A/Phase Step Angle: 0.72?/step 2RK545AMAPulse Speed [kHz]0(0)30(300)20(200)10(100)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]132Current: 0.75 A/Phase Step Angle: 0.72?/step 2ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Be sure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)ⅷWhen using the motor with the dedicated driver, the driver’s automatic current cutback function at motor standstill reduces maximum holding torque by approximately 50%.13FeaturesLine-upSystem Configuration Product LineSpecifications and CharacteristicsDimensionsConnection and Operation List of Motor and Driver CombinationsAccessoriesBefore Using a Stepping Motor ControllersStandard Type with Electromagnetic Brake Motor Frame Size 60 mm, 85 mmⅥSpecificationsHow to Read Specifications Table ?Page 9Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.ⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK564AMAE RK564AMCEPulse Speed [kHz]0(0)10(100)20(200)30(300)Speed [r/min]T o r q u e [N ?m ]Resolution 1(Resolution 10)C u r r e n t [A ]462Current: 1.4 A/Phase Step Angle: 0.72?/step 2RK566AMAE RK566AMCEPulse Speed [kHz]0(0)10(100)20(200)30(300) Speed [r/min]T o r q u e [N ?m ]Resolution 1(Resolution 10)C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2RK569AMAE RK569AMCEPulse Speed [kHz]0(0)10(100)20(200)30(300) Speed [r/min]T o r q u e [N ?m ]Resolution 1(Resolution 10)C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Be sure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)ⅷWhen using the motor with the dedicated driver, the driver’s automatic current cutback function at motor standstill reduces maximum holding torque by approximately 50%.RK596AMAE RK596AMCEPulse Speed [kHz]0(0)10(100)20(200) Speed [r/min]Resolution 1(Resolution 10)T o r q u e [N ?m ]C u r r e n t [A ]510Current: 1.4A/Phase Step Angle: 0.72? step 2RK599AMAE RK599AMCEPulse Speed [kHz]0(0)Speed [r/min]Resolution 1(Resolution 10)5(50)10(100)T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2 RK5913AMAE RK5913AMCEPulse Speed [kHz]0(0)5(50)10(100) Speed [r/min]Resolution 1(Resolution 10)T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.72?/step 2 14TH Geared Type Motor Frame Size 42 mmⅥSpecificationsⅷWith the RK54Ⅺtype, only the driver conforms to the CSA standard.How to Read Specifications Table ?Page 9Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.Note:ⅷDirection of rotation of the motor and that of the gear output shaft are the same for models with gear ratios of 1:3.6, 1:7.2 and 1:10. It is opposite for 1:20 and 1:30 gear ratio models.ⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK543AA-T3.6/RK543BA-T3.6Pulse Speed [kHz]0(0)15(150)10(100)5(50)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]12Current: 0.75 A/Phase Step Angle: 0.2?/step 2RK543AA-T7.2/RK543BA-T7.2Pulse Speed [kHz]0(0)15(150)10(100)5(50)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]12Current: 0.75 A/Phase Step Angle: 0.1?/step 2RK543AA-T10/RK543BA-T10Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)10(100)15(150)T o r q u e [N ?m ]C u r r e n t [A ]12Current: 0.75 A/Phase Step Angle: 0.072?/step 2ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Be sure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)ⅷWhen using the motor with the dedicated driver, the driver’s automatic current cutback function at motor standstill reduces maximum holding torque by approximately 50%.RK543AA-T20/RK543BA-T20Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)10(100)15(150)T o r q u e [N ?m ]C u r r e n t [A ]12Current: 0.75 A/Phase Step Angle: 0.036?/step 2RK543AA-T30/RK543BA-T30T o rq u e [N ?m ]C u r r e n t [A ]12Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)10(100)15(150)Current: 0.75 A/Phase Step Angle: 0.024?/step 215FeaturesLine-upSystemConfiguration Product LineSpecifications and CharacteristicsDimensionsConnection and Operation List of Motor and Driver Combinations AccessoriesBefore Using a Stepping MotorControllersTH Geared Type Motor Frame Size 60 mmⅥSpecificationsHow to Read Specifications Table ?Page 9Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.Note:ⅷDirection of rotation of the motor and that of the gear output shaft are the same for models with gear ratios of 1:3.6, 1:7.2 and 1:10. It is opposite for 1:20 and 1:30 gear ratio models.ⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK564ⅪAE-T3.6 RK564ⅪCE-T3.6Pulse Speed [kHz]0(0)15(150)10(100)5(50)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]24Current: 1.4 A/Phase Step Angle: 0.2?/step 2RK564ⅪAE-T7.2 RK564ⅪCE-T7.2Pulse Speed [kHz]0(0)15(150)10(100)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.1?/step 2RK564ⅪAE-T10 RK564ⅪCE-T10Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)10(100)15(150)T o r q u e [N ?m ]C u r r e n t [A ]24Current: 1.4 A/Phase Step Angle: 0.072?/step 2ⅷEnter A (Single shaft) or B (Double shaft) in the box (Ⅺ) within the model name.ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Be sure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)ⅷWhen using the motor with the dedicated driver, the driver’s automatic current cutback function at motor standstill reduces maximum holding torque by approximately 50%.RK564ⅪAE-T20 RK564ⅪCE-T20Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)15(150)T o r q u e [N ?m ]C u r r e n t [A ]24Current: 1.4 A/Phase Step Angle: 0.036?/step 2RK564ⅪAE-T30 RK564ⅪCE-T30Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)10(100)15(150)T o r q u e [N ?m ]C u r r e n t [A ]24Current: 1.4 A/Phase Step Angle: 0.024?/step 216TH Geared Type Motor Frame Size 90 mmⅥSpecificationsHow to Read Specifications Table ?Page 9Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.Note:ⅷDirection of rotation of the motor and that of the gear output shaft are the same for models with gear ratios of 1:3.6, 1:7.2 and 1:10. It is opposite for 1:20 and 1:30 gear ratio models.ⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK596ⅪAE-T3.6 RK596ⅪCE-T3.6Pulse Speed [kHz]0(0)15(150)10(100)5(50)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]2.55Current: 1.4 A/Phase Step Angle: 0.2?/step 2 RK596ⅪAE-T7.2 RK596ⅪCE-T7.2Pulse Speed [kHz]0(0)15(150)10(100)5(50)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]2.55Current: 1.4 A/Phase Step Angle: 0.1?/step 2 RK596ⅪAE-T10 RK596ⅪCE-T10Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)10(100)15(150)T o r q u e [N ?m ]C u r r e n t [A ]264Current: 1.4 A/Phase Step Angle: 0.072?/step 2ⅷEnter A (Single shaft) or B (Double shaft) in the box (Ⅺ) within the model name.ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Be sure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)ⅷWhen using the motor with the dedicated driver, the driver’s automatic current cutback function at motor standstill reduces maximum holding torque by approximately 50%.RK596ⅪAE-T20 RK596ⅪCE-T20C u r r e n t [A ]Pulse Speed [kHz](Resolution 10)(0)(50)(100)(150)Current: 1.4 A/Phase Step Angle: 0.036?/step 2RK596ⅪAE-T30 RK596ⅪCE-T30C u r r e n t [A ]Pulse Speed [kHz](Resolution 10)(0)(50)(150)Current: 1.4 A/Phase Step Angle: 0.024?/step 217FeaturesLine-upSystem ConfigurationProduct LineSpecifications and CharacteristicsDimensionsConnection and Operation List of Motor and Driver CombinationsAccessoriesBefore Using a Stepping Motor ControllersPL Geared Type Motor Frame Size 42 mmⅥSpecificationsⅷWith the RK54Ⅺ type, only the driver conforms to the CSA standard.How to Read Specifications Table ?Page 9Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.Note:ⅷDirection of rotation of the motor and that of the gear output shaft are the same.ⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK545AA-P5 RK545BA-P5Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)15(150)T o r q u e [N ?m ]C u r r e n t [A ]12Current: 0.75 A/Phase Step Angle: 0.144?/step 2RK545AA-P7.2RK545BA-P7.2Pulse Speed [kHz]0(0)15(150)10(100)5(50)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]12Current: 0.75 A/Phase Step Angle: 0.1?/step 2RK545AA-P10RK545BA-P10Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)10(100)15(150)T o r q u e [N ?m ]C u r r e n t [A ]12Current: 0.75 A/Phase Step Angle: 0.072?/step 2ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Besure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)ⅷWhen using the motor with the dedicated driver, the driver’s automatic current cutback function at motor standstill reduces maximum holding torque by approximately 50%.RK543AA-P25 RK543BA-P25Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min](0)(50)(100)(150)T o r q u e [N ?m ]C u r r e n t [A ]12Current: 0.75 A/Phase Step Angle: 0.0288?/step2RK543AA-P36 RK543BA-P36Pulse Speed [kHz]0(0)15(150)10(100)5(50)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]21Current: 0.75 A/Phase Step Angle: 0.02?/step2RK543AA-P50 RK543BA-P50Pulse Speed [kHz]0(0)15(150)10(100)5(50)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]21Current: 0.75 A/Phase Step Angle: 0.0144?/step 218PL Geared Type Motor Frame Size 60 mmⅥSpecificationsHow to Read Specifications Table ?Page 9Sixteen resolutions are available, where n=1, 2, 2.5, 4, 5, 8, 10, 20, 25, 40, 50, 80, 100, 125, 200 and 250.Note:ⅷDirection of rotation of the motor and that of the gear output shaft are the same.ⅥSpeed – Torque Characteristics fs: Maximum Starting FrequencyRK566ⅪAE-P5 RK566ⅪCE-P5Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min]0(0)5(50)10(100)15(150)T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.144?/step 2RK566ⅪAE-P7.2 RK566ⅪCE-P7.2Pulse Speed [kHz](0)(150)(100)(50)Resolution 1(Resolution 10)Speed [r/min]T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.1?/step 2RK566ⅪAE-P10 RK566ⅪCE-P10Pulse Speed [kHz]Resolution 1(Resolution 10)Speed [r/min](0)(50)(100)(150)T o r q u e [N ?m ]C u r r e n t [A ]48Current: 1.4 A/Phase Step Angle: 0.072?/step 2ⅷEnter A (Single shaft) or B (Double shaft) in the box (Ⅺ) within the model name.ⅷThe pulse input circuit responds to approximately 200 kHz with a pulse duty of 50%.Notes:ⅷPay attention to heat dissipation from motor as there will be a considerable amount of heat under certain conditions.Be sure to keep the temperature of the motor case under 100?C.(Under 75?C is required to comply with UL or CSA standards.)。
东方马达 CMK系列

部分的转轴。
60
21
Q 驱动器 11 驱动器部 品名:CMD2109P、CMD2112P、CMD2120P M 质量:0.05kg B441
13 3.5
12
17.4 20.55
12
17.55 2R1.75
7.4 59
2R1.75 3.5 33
P附件
连接器插头 51103-0200(MOLEX) 51103-1200(MOLEX) 51103-0600(MOLEX) 接点 50351-8100(MOLEX)
P 品名的 中为表示减速比的数值。
安装用螺丝 M4 P0. 长度 15mm…4 个 6.350.012 5.80.15
0
P附件
161 150.25
60
控制器
24
700.5
M56.4
4M4 深度 8 电动机导线 6 根 300mm UL Style 3265, AWG22
P 此外形图为双轴产品。单轴产品则无
7.50.15
12
0
P适用接器
18.5
6
1
29 44.5 孔
连接器插头:5106-0600(MOLEX) 接点:5021-9101(MOLEX) 压接工具:5189-5000(MOLEX) 5190-5000(MOLEX)
P 此外形图为双轴产品。单轴产品则无
部分的转轴。
19
品名 CMK243AP CMK243MAP CMK243BP CMK243MBP CMK244AP CMK244MAP CMK244BP CMK244MBP CMK245AP CMK245MAP CMK245BP CMK245MBP
✽
4.50.15 0 50.012(h7)
东方马达

3
2.2 品名及搭配的确认
MSS·W系列产品为电动机与速度控制器配套的产品。 收到产品后, 请参照铭板上记载的内容,确认电动机与速度控制器的搭配是否正确。
■ 感应电动机(连续额定)
100V/110V/115V 型
组合品名※1
MSS206-401WJ-□G MSS206-001WJ-□G MSS206-401WU-□G MSS206-001WU-□G MSS315-401WJ-□G MSS315-001WJ-□G MSS315-401WU-□G MSS315-001WU-□G MSS425-401WJ-□G MSS425-001WJ-□G MSS425-401WU-□G MSS425-001WU-□G MSS540-401WJ-□G MSS540-001WJ-□G MSS540-401WU-□G MSS540-001WU-□G MSS560-501WJ-□G MSS560-001WJ-□G MSS560-501WU-□G MSS560-001WU-□G MSS590-501WJ-□G MSS590-001WJ-□G MSS590-501WU-□G MSS590-001WU-□G
● 输入输出信号用端子请使用与一次侧强化绝缘的DC电源以避免触电。
1.2 运转注意事项
● 电动机即使处于正常的运转状态,其表面温度有时也有可能超过70℃。在人有可能接近运转中的
电动机的情况下,请在显有著的位置张贴如右图所示的警告标志。
● 在检查附热保护器(Thermal Protector)电动机以及实施其他作业时,一定要事先切断电源。
电动机品名
USM206-401W USM206-001W USM206-401W USM206-001W USM315-401W USM315-001W USM315-401W USM315-001W USM425-401W USM425-001W USM425-401W USM425-001W USM540-401W USM540-001W USM540-401W USM540-001W USM560-501W USM560-001W USM560-501W USM560-001W USM590-501W USM590-001W USM590-501W USM590-001W
东方马达pk5_cp

进
电 动
RoHS指令符合品
机 5相步进电动机
PK系列
5相PK系列为每转500分割(0.72˚/step )的高转矩 · 低 振动型步进电动机。为了适应所有的驱动方式,导线规 格设计为10条导线。驱动本系列时需另购驱动器。
●相关信息● 技术资料➜ G-1页
■品名的阅读方法
PK 5 6 6 H - B
C-130 C-170
− RK596□ ■E
− RK599□ ■E
− −
− C-130
− C-130
− −
外形图 编号
■转速―转矩特性 转速―转矩特性的阅读方法 ➜ C-10页
PK564-A/PK564-B
恒流驱动器 电源电压:DC24V 设定电流:0.75A/相(4相励磁时) 附带制振器D6CL-8.0F:JL=140×10-7kg·m2 0.6
规格表的阅读方法 ➜ C-10页 ● 上表电动机的转速―转矩特性请参考相当的组合产品的特性。若无相当的组合品名,请参考以下特性。 ● 品名的 □ 中为表示轴形的 A 或 B。
品名的■中为表示电源输入的A或C。
质量 kg 0.21 0.27 0.35 0.6
0.8
1.3 1.7 2.8 3.8
相当的组合品名及转速― 转矩特性 刊载页
PK569H-A/PK569H-B
恒流驱动器 电源电压:DC24V 设定电流:2.8A/相(4相励磁时) 附带制振器D6CL-8.0F:JL=140×10-7kg·m2 2.5
整步0.72˚/step 2.0
转矩[N·m]
1.5 最大同步转矩
1.0
0.5
00
fs 500
1000
转速[r/min]
伺服电动机 - 首页东方马达(ORIENTAL MOTOR)中国官 …

12.7 18
12.7
屏蔽
300+300
13.9
1000+080
● 适用压接端子 · 端子螺丝尺寸 :M3 · 紧固转矩 :1.2N·m · 最小适用导线 :AWG22( 0.3mm2 )
请注意 ● 不能使用圆形端子。
12.7 13.9 3.2mm以上
5.8 mm以上 4.2 mm以下
CAD、选型 官方网站 使用说明书
带圆形绝缘膜被的压接端子(1.25-4)
52316-2019(Molex)
52316-2019(Molex) 54331-1201(Molex)
54331-1201(Molex) 300+030
ϕ7.5 43.46 33.3
ϕ6.4 6.2 mm以下
33.3
43.46
12.7 18
屏蔽
300+300 1000+080
耦合器外罩
圆形端子:FV1.25-4(JST)
◇ 电磁制动用电缆线
电动机侧
驱动器侧
5559-02P-210(Molex) 棒状端子 :AI0.5-8WH (PHOENIX CONTACT)
ϕ4.1(可动电缆线为ϕ6)
耦合器外罩
CAD、选型 官方网站 使用说明书
带圆形绝缘膜被的压接端子(1.25-4)
52316-3619(Molex)
52316-3619(Molex)
54331-1361(Molex)
54331-1361(Molex)
300
+30 0
端子台端子编号
11 12 13 14 15 16 17 18 19 20 1 2 3 4 5 6 7 8 9 10
BMU东方马达说明书

设置
• 电动机、驱动器周围请勿堆放妨碍通风的障碍物,否则有可能造成装置破损。 • 搬运时请勿手持电动机(减速机)输出轴和电缆线,否则有可能致伤。 • 请勿徒手碰触电动机输出轴(键槽、切齿部),否则有可能致伤。 • 电动机(齿轮轴)与减速机组装时,请注意勿将手指等夹在电动机与减速机之间,否则有可能致伤。 • 请将电动机(减速机)、驱动器牢固固定在安装板上,否则有可能因落下致伤或造成装置破损。 • 电动机(减速机)的旋转部(输出轴)上请安装外罩,否则有可能致伤。 • 将电动机(减速机)设置在装置上时,注意勿将手指等夹在装置与电动机或装置与减速机之间,否则有可能
6 连接....................................................14
6.1 电源的连接 ............................................ 14 6.2 电动机的连接......................................... 14 6.3 接地 ....................................................... 15 6.4 输入/输出信号的连接 .......................... 15 6.5 连接例 ................................................... 17
联体型平行轴减速机的设置 ...................... 10 减速机的拆卸・安装................................... 11 圆轴型的设置............................................ 11 负载的安装 ............................................... 12 容许径向负载与容许轴向负载 .................. 12 5.3 驱动器的设置......................................... 13
东方马达BX系列2
客户咨询中心 : 400-820-6516 B-33
ϕ54
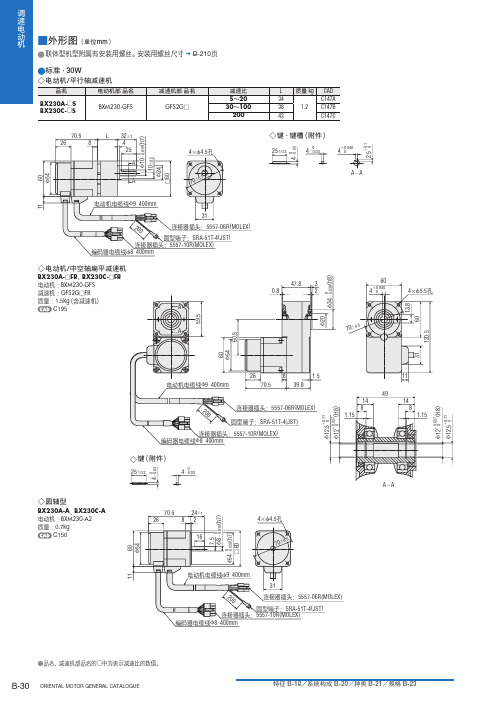
调 速 电 动 机 ●带电磁制动 · 30W
◇ 电动机 / 平行轴减速机
品名
电动机部 品名
BX230AM-□S BX230CM-□S
BXM230M-GFS
减速机部 品名 GFS2G□
110 26
L 32±1
8
4
25
A
A
60
减速比 5~20 30~100 200
无
刷
电 AC输入
动 机
AXU
AC输入
FBL
DC输入
BLH
MSS·W
A C调 速 电 US 动 机
ES01/ ES02
FE100/ 变 FE200 频 器
200W BHF
电缆线
选
购
配 件
转速表
其他
9.5 ϕ10−00.015(h7) ϕ73−00.030(h7) □80
ϕ54
80
11
安装 电动机电缆线ϕ9 400mm
◇键 · 键槽(附件)
32±0.2
6 −00.03
6−00.03
● 出厂时,键固定于键槽上。
A−A
ϕ25
11
保护接地端子 M4
电动机电缆线ϕ9 400mm
31
连接器插头:5557-06R(MOLEX)
连接器插头:5557-10R(MOLEX) 编码器电缆线ϕ8 400mm
◇ 圆轴型
BX6200A-A、BX6200C-A、BX6400S-A 电动机 :BXM6200-A、BXM6400-A 质量 :2.5kg
4+00.040
A−A
ϕ20 ϕ34−00.039(h8)
东方马达高效率AR系列用户手册

14 一般规格 ...........................................56
15 Alarm 与 Warning ..............................57
12 扩张功能 ...........................................47
12.1 设 定...................................................... 48
分辨率 ...........................................................48 脉冲输入方式................................................49 接通电源时的电动机励磁 ............................ 51 自动还原动作................................................51 电动机旋转方向的设定................................51 定位结束输出偏置的设定 ............................ 51
10 输入/输出信号的说明...................... 37
10.1 输入信号 ................................................ 37 10.2 输出信号 ................................................ 40 10.3 时序图.................................................... 43
日本东方马达型号大全

AS系列闭环控制步进马达组合产品规格一览表组合型号一览表电动机单体型号一览表驱动器型号一览表ASC系列闭环控制步进马达组合产品规格一览表组合型号一览表电动机单体型号一览表驱动器型号一览表RK系列5相步进马达组合产品规格一览表组合型号一览表电动机单体型号一览表驱动器型号一览表UPK · W系列5相步进马达组合具有东方步进马达的一般特性,为5相步进马达与专用驱动器的组合。
2. 具有易操作性的特点。
3. 种类齐全,有两百多种可供选择。
组合型号一览表电动机单体型号一览表驱动器型号一览表PMU系列5相步进马达组合具有东方步进马达的一般特性,为5相步进马达与专用驱动器的组合。
2. 安装尺寸为28*28mm,为小型,轻便型而推出的系列规格一览表组合型号一览表电动机单体型号一览表驱动器型号一览表UMK系列2相步进马达组合步进角为1.8°的2相步进马达与专用AC驱动器的组合。
2. 拥有内藏自动电流OFF,脉冲输入方式切换,步距角切换,过热输出逻辑切换功能,另配有用于检测机构原点时使用的激磁时序输出(TIMING)功能规格一览表组合型号一览表电动机单体型号一览表驱动器型号一览表CFKⅡ系列5相步进马达组合. 马达最小安装尺寸仅为20mm的微型设计,小型基板型驱动器,符合设备小型化的趋势。
2. 驱动器对应DC24~36V电压输入。
3. 低速情况下仍能保持低振荡的特性,适用于低速精密执行的场合。
规格一览表组合型号一览表电动机单体型号一览表驱动器型号一览表CRK系列5相步进马达组合1. 5相高性能步进马达与具备平滑驱动功能的小型,低振动,低噪音的驱动器的组合,2 .DC24V光耦合器输入,单/双脉冲输入规格。
3. CRK系列在保留前部品的优点情况下,推出追求定位精密的高分辨型规格一览表组合型号一览表电动机单体型号一览表驱动器型号一览表CSK系列5相步进马达组合1. 5相高性能步进马达与具备平滑驱动功能的小型,低振动,低噪音的驱动器的组合,2 .为东方步进马达的基本型组合。
马达选型讲义

2.6 选用示例
2. AC伺服电动机 (1)驱动机构部的规格及运行条件
如下图所示,为例驱动单轴的工作台,选用AC伺服电动机。
4 7
2.6 选用示例
根据工作台驱动所需的分辨率计算电动机的分辨率。
(3)运行模式的制定
根据工作台驱动所需的分辨率计算电动机的分辨率。
4 8
2.6 选用示例
4 9
2.6 选用示例
中空圆柱的转动惯量
1 0
不通过重心的轴的转动惯量
角柱的转动惯量
1 1
直线运动物体的转动惯量
1 2
1 3
2.4 马达选用计算公式
下面以日本东方马达的脉冲信号控制步进马达和AC伺服马达的选型为例进 行说明,在实际工程项目里选型时则需根据所用品牌电机的选型要求进行。 注意:不同品牌的马达在实际选型时考量的项目会有差异,但不外乎前文 提到的两个原则:适用,耐用。
3 7
2.6 选用示例
1. 步进电动机 (1)驱动机构部的规格及运行条件
3 8
2.6 选用示例
(2)必要分辨率的计算
(3)运行模式的制定
①工作脉冲数A[脉冲]的计算
3 9
2.6 选用示例
加减速时间以定位时间的25%为适。
4 0
2.6 选用示例
4 1
2.6 选用示例
4 2
2.6 选用示例
按通用方式计算
3 1
2.5 选用的重点
系数表 对象组合产品 5相步进电动机 2相步进电动机
0.72° 1.8° 0.36°
3 2
2.5 选用的重点
④ 惯性比的确认
惯性比按以下计算式计算。
减速电动机时
若步进电动机的惯性比大,则起动、停止时的过冲现象与回冲现象也变大,因而会影响起 动、稳定时间。但是,控制器输出的脉冲信号,其加减速时的脉冲速度为阶梯状变化,剧 烈加减速时段差会增大。因此,若惯性比较大可能导致无法运行。为使得选用的电动机运 行更正确,请确认其惯性比在下表的参考值以下。
东方马达选购配件
AS·ASC 系列的标准 AS 系列· ASC 系列安装尺寸 42mm 的带电磁制动
■种类
●标准用
品名 长度 L(m)
CC01SAR
1
CC02SAR
2
CC03SAR
3
CC05SAR
5
CC07SAR
7
CC10SAR
10
●带电磁制动用
品名 长度 L(m)
CC01SARM2
1
CC02SARM2
2
CC03SARM2
系列名称
ASC ASC34 ASC36 ASC46 ASC46-T3.6~10 ASC46-T20、30 ASC66 ASC66-T3.6、7.2 ASC34-H50、100 ASC46-N7.2、10
ASC66-T10~30 ASC46-H50、100 ASC66-N5、7.2
ASC66-N10~50 ASC66-H50、100
■品名的阅读方法
MCS 30 08 12
内径d2(大内径侧) (F04表示f6.35mm)
内径d1(小内径侧) (F04表示f6.35mm)
联轴器外径 MCS联轴器
■联轴器选用表
●
AS
AS46
AS46-T3.6~10 AS46-T20、30 AS66 AS69 AS66-T3.6、7.2 AS46-P7.2、10 AS46-N7.2、10 AS98 AS911 AS66-T10~30 AS46-P36、50 AS46-H50、100 AS66-P5、7.2 AS66-N5、7.2 AS98-T3.6~30 AS66-P10~50 AS66-N10~50 AS66-H50、100 AS98-P5~50 AS98-N5~50 AS98-H50、100
东方马达中文说明书
HM-5074使用說明書竭誠感譝您對本公司製品的惠顧。
本使用說明書就製品的使用方法與安全注意事項進行說明。
請熟讀使用說明書,並在使用製品時注意安全。
閱讀完使用說明書後,務請將其保存在合適的地方,以便隨時可以查閱。
無刷DC馬達組合BLF 系列目 次1前言 (3)2安全注意事項 (6)3使用須知 (9)4準備 (11)4.1 製品的確認 (11)4.2 組合品名的識別方法 (12)4.3 組合一覽 (12)4.4 各部的名稱和功能 (14)5安裝 (17)5.1 安裝場所 (17)5.2 裝配型平行軸減速機的安裝 (17)5.3 裝配型中空軸平形減速機的安裝 (19)5.4 圓軸型的安裝 (21)5.5 齒輪型的安裝 (21)5.6 裝配型平行軸減速機、圓軸型的負載安裝 (22)5.7 裝配型中空軸平形減速機的負載安裝 (24)5.8 驅動器的安裝 (25)5.9 數位操作器的盤面安裝 (27)5.10 適合EMC指令的安裝・配線方法(89/336/EEC、92/31/EEC) (28)6接線 (31)6.1 電源的接線 (32)6.2 馬達的接線 (33)6.3 接地 (35)6.4 外部輸入輸出信號的接線 (37)6.5 接線範例 (40)7運轉 (42)7.1 切換操作模式 (42)7.2 馬達出力軸的運轉方向 (43)7.3 操作流程一覽..........................................44 8基本運轉 (46)8.1 運轉方法 (46)8.2 接通電源時的顯示 (47)8.3 用內部速度設定器設定速度 (47)8.4 由數位設定來設定速度 (49)8.5 由外部速度設定器(外部直流電壓)設定速度 (52)8.6 根據外部輸入信號運轉 (55)8.7 關掉電源時的顯示 (60)9應用運轉 (61)9.1 多段速運轉 (61)9.2 並列運轉 (64)9.3 速度表示和負載率表示的切換 (66)9.4 數位操作器的按鍵鎖定 (67)9.5 速度資料的示教 (67)9.6 運轉方向的切換 (68)9.7 運轉信號輸入方法的切換 (68)9.8 加速時間、減速時間的設定 (69)9.9 減速比的設定 (71)9.10 輸入方式的設定 (72)9.11 STOP鍵的有效/無效設定 (74)9.12 SINK/SOURCE邏輯的切換 (74)9.13 資料的初始化 (77)10保護功能 (78)10.1 過負載警告功能的設定 (78)10.2 驅動器的保護功能 (80)11檢查 (81)12故障的診斷與處理 (82)13附錄 (84)13.1 專用接線電纜線 (84)13.2 選購配件 (84)13.3 推薦周邊機器 (86)13.4 初始設定一覽 (87)1前言1前言使用前請由有適當資格的人使用本製品。
东方马达五相马达crk5107使用说明,中文的哦。
5 相步進馬達組合
CRK ...................................................................... 2 安全注意事項 ....................................................... 3 使用須知............................................................... 5 準備 ...................................................................... 7 4.1 製品的確認 ..................................................... 7 4.2 馬達、驅動器的組合 ....................................... 7 4.3 各部的名稱和功能......................................... 10 5 安裝 .................................................................... 12 5.1 安裝場所 ....................................................... 12 5.2 馬達的安裝 ................................................... 12 5.3 負載的安裝 ................................................... 14 5.4 容許懸吊載重與容許推力載重 ....................... 14 5.5 驅動器的安裝 ................................................ 16 5.6 適合 EMC 指令的安裝‧配線方法 ................. 18 6 接線 .................................................................... 21 6.1 接線範例 ....................................................... 21 6.2 適用接頭和適用連接器外罩 .......................... 23 6.3 電源的接線 ................................................... 24 6.4 輸入輸出信號的說明 ..................................... 24 6.5 時序圖 .......................................................... 28 7 設定 .................................................................... 29 7.1 步級角 .......................................................... 29 7.2 脈波輸入方式 ................................................ 30 7.3 平滑驅動功能 ................................................ 31 7.4 馬達電流 ....................................................... 32 8 檢查 .................................................................... 36 9 故障的診斷和處理 .............................................. 37 10 選購配件(另售)............................................. 39 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁 頁
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
༶ᔷٙʔѩʴତ ༶ᔷٙʔѩʴତ
ࣈਗϓʱཥᏀVp-p[V]
0.5
பைடு நூலகம்
0
0
200
400
600
800
1000
ᔷ[r/min]
0 ̻ᚨਗ̌ঐjϞ
高精度.高轉矩馬達
●●高解析度馬達
◇◇停止精度提升 步進馬達的定位精度會受到摩擦負載的影響。 高解析度型為透過本公司最新精密加工技術所實現的高精度. 高穩 定性馬達。 將馬達的解析度設為標準規格的 2 倍,對負載轉矩的變 位角度將變小,可得到較高的定位精度。 此外,亦可降低振動。
●●具平滑驅動功能,易於使用
平滑驅動功能係指利用與全步級相同的設定進行自動微步級驅動的 控制。
ࣈਗतˢ༰
1.5 CSK566AP 0.72ࠑ/step CRK566AKD 0.072ࠑ/step㧔ฆӉॴᚨਗ㧕
特 徵
1.0
༶ᔷٙʔѩʴତˢ༰㕘UPLQࣛ㕙 0.72Ę/step
0 ̻ᚨਗ̌ঐjೌ
ᔷÑᔷॉतˢ༰
ண֛ཥݴ㧦1.4A/ޓӉॴԉ㧦0.36˚/step ڝՓࣈኜD6CL-8.0F㧦JL=140×10̅7kg㨯m2 1.6
CRK566PMBKD ৷༆ؓۨܓ 1.2
ᔷॉ㨇N㨯m㨉
0.8
CRK566BKD
0.4
ᅺۨ
00 100 200 300 400 500 600 700 800 900 1000 ᔷ㨇r/min㨉
"直動型
馬達內部採用軸向軸承機構,亦可與安裝滾珠螺桿的直動型組合。 詳情請洽本公司或客戶諮詢中心 (0800)060708。
RoHS 指令對應品
-TL
৷༆ؓۨܓ
-0.5
ᅺۨ
-1
㧦CRK566AKD ᅺۨ
㧦CRK566PMAKD ৷༆ؓۨܓ
-1.5
◇◇實現靜止角度誤差 2 分(無負載) 實現靜止角度誤差2分(0.034°)〔標準型:3分(0.05°)〕。有助於 提升裝置的定位精度。
對應 DIN導軌的小型驅動器
ԉܓႬࢨ [ ˚ ]
᎑˟ԉܓत
ཥ๕ཥᏀ㧦DC24V 㕡ʱ௲㧔0.36˚step㧕 0.06
0.05
0.04
0.03 0.02
0.01 0
CRK566PMBKD
-0.01 -0.02 -0.03 -0.04 -0.05 -0.060
60
120 180 240 300 360
ԉ] ˚ [ ܓ
●●高轉矩馬達
高解析度型+高轉矩型為新設計的高轉矩馬達,因此應用領域廣 泛。 ●●可使用較小型的馬達,實現機器的小型化。 ●●可降低馬達電流,減低發熱。 例)避免受到精密用途的溫度影響等
驅動器中運轉資料最多可設定63點。 每筆資料可以增量式(指定相對距離)方式/絕對式(指定絕對位 置)方式進行設定。
৵༺
ᚨਗኜ
ೌც এتପ͛ኜ
̙όછՓኜ
3個運轉模式
●●定位運轉
將馬達的轉速和移動量設定在運轉資料,依據所選擇的運轉資料, 進行運轉。
◇◇連結運轉 在運轉資料中設定「連結」後,利用1次的START信號,即可讓下一 個資料No.也持續進行定位。
◇◇用於位置計算 計算輸出的信號,即可確認對馬達的指令位置。
●●群組傳送功能(僅限 RS-485 通訊)
可由 RS-485 通訊中連接的複數軸構成群組,以群組為單位,傳 送指令。 亦可實現複數軸的同時起動和同一動作。
༶ᔷܸ˿ RS-485ஷৃ
0ዚ㕐֛З༶ᔷක
0ዚ˴ൿٙ ৵༺ਗЪ
1ዚൿٙ ৵༺ਗЪ
●●警告輸出功能 ✽
若發生偏差異常,將輸出「位置偏差過大」警告。馬達將持續動 作。
✽✽當發生偏差異常時,可利用參數設定,輸出ALARM或是警告。
●●應用範例
可檢知因障礙物等,使門無法動作至正 常位置的狀況。
方便的功能
●●PLS-OUT 輸出功能 ◇◇可同步運轉 輸出與指令值相同的脈波數、脈波速度的信號。若將PLS-OUT信 號與DIR-OUT信號(運轉方向信號)輸入其他的驅動器中,即可 驅動其他軸的馬達。
利用上位控制器進行的控制,對應I/O控制.RS-485通訊控制。 此外,亦可透過通訊協定變換器的網路轉換器(另售),對應CC-Link通訊、MECHATROLINK通訊。
●●I/O 控制的系統 運轉採I/O控制,可輕鬆操作。
༟ࣘண֛ኜ
༟ࣘண֛ழ
OPX-2A̤ਯ
MEXE02̤ਯ
א
ཥ໘
ሗ˒܄І௪f
5
"充實的產品種類
備有馬達安裝尺寸 20 ∼ 60mm 共 4 個尺寸的馬達及 4 種類的減速機型馬達,備有與驅動器的組合。
類型
高解析度型
高轉矩型
高轉矩型附編碼器
標準型
標準型 附電磁剎車
標準型附編碼器
特徵
此 為 高 轉 矩 設 計 的 此為高轉矩設計馬達 在高轉矩型的馬達中 在轉矩、低振動、降
馬 達 , 基 本 步 級 角 ,與過去的標準型相 組裝編碼器,有助於 低噪音取得平衡的基
ዚࡡᓃ ཥंࡡᓃ Ꮸٝኜ
2
INDEX
特徵
2
系統構成
8
種類
9
規格.特性
11
外形圖
29
連接與運轉転
37
馬達/驅動器組合一覽表覧
45
選購配件
46
關於安裝
65
檢出偏差異常(備有附編碼器馬達)
使用附編碼器馬達,即可檢知位置差距等。有助於更進一步提升裝 置的穩定性。
ʫ ପ͛এت
ܸ˿Зໄ ࠇᅰኜ
৵༺ ᚨਗΫ༩
為 標 準 型 一 半 的 比 , 實 現 了 約 1 . 3 ~ 提升信賴度。
本機種。
0.36°/step。 此為追 1.5倍的轉矩。
求位置精度的馬達。
在馬達中組裝無激磁 作動型電磁剎車。
在標準型馬達中組裝 編碼器。 有助於提升信賴度。
特 徵
□20mm
□28mm (□30mm)
□42mm
□60mm
৵༺
ᚨਗኜ
̙όછՓኜ
●●RS-485 通訊的系統
在RS-485通訊中,可進行運轉資料和參數的設定、運轉指令的輸入。 針對1台上位控制器,最多可連接31台驅動器。此外,亦可使複數軸 同時起動。通訊協定對應Modbus RTU,可利用可程式控制器等輕鬆 連接。
特 徵 ◇◇資料設定與運轉指令的控制方法
運轉資料.參數設定
●●箱型且小型的 DC 電源輸入驅動器 驅動器尺寸輕巧,寬度35mm×高度100mm×深度70mm。有助於 節省控制盤和裝置的設置空間。
70mm
●●可進行 DIN 導軌安裝
可直接安裝在 DIN 導軌上。 安裝時無需使用螺絲。
●●安裝時,僅對應 DIN 導軌。
100mm
35mm
4
可選擇 3種控制方法
ᅺۨc
༆ؓܓ㕐ʱ௲ØĘ㕟VWHS
ԉܓÑᔷॉतˢ༰
TL 㧦ᅙᏜᔷॉ TH1,TH2 㧦ዧှ௰ɽ 㕐㕐㕐㕐㕐㕐㕐㕐᎑˟ᔷॉ
1.5 ᔷॉ㨇Nm㨉 TH2
1 TH1
0.5
༆ؓܓ83l
TL
0
㜞⸃ᨆᐲဳޓ
-1.8
-0.9
0.9
1.8 ԉި˚ާܓ
༆ؓܓʱ௲㧩qVWHS
此為將資料儲存型控制器功能內藏於驅動器中的 微步級驅動 DC輸入5相步進馬達組合。 全新推出附編碼器馬達,可監視位置資訊。 控制方法可選擇 I/O控制等 3個種類。
在輕巧的驅動器中內藏控制器功能
●●節省空間、節省配線 無需脈波產生器,且驅動器體積小,因此可節省設置空間,並簡化 系統。
●●最多 63 點的運轉資料
◇◇資料設定與運轉指令的控制方法
運轉資料 ‧ 參數設定
運轉指令 (START、STOP 等)
資料設定器(OPX-2A)、 資料設定軟體
(MEXE02)或 RS-485 通訊
I/O 或 RS-485 通訊
●●START輸入、STOP輸入、FWD輸入、RVS輸入等的運轉 指令亦可由I/O進行控制。
●●示教功能和測試功能可透過資料設定器(OPX-2A)或資料
ཥ໘
ሗ˒܄І௪f
&&/LQNஷৃ א
0(&+$752/,1. ஷৃ
৵༺
ᚨਗኜ
ၣ༩ᔷ౬ኜ
NETC01-CC̤ਯ NETC01-M2̤ਯ NETC01-M3̤ਯ
̙όછՓኜ
◇◇資料設定與運轉指令的控制方法
運轉資料 ‧ 參數設定
運轉指令 (START、STOP 等)
資料設定器(OPX-2A)、 資料設定軟體
㖋ஹഐ༶ᔷ㖍
༟ࣘ ༟ࣘ ༟ࣘ 1R 1R 1R
፯༟ࣘ1Rd፩ɝ67$57ܝdೌც৾ ˟৵༺dу̙ஹഐ༟ࣘ1RЇ1Rdආ Бᚨਗf
㖋ஹഐ༶ᔷ㖍
͍ᔷ
৾वࣛග㧔'ZHOO7LPH㧕
༟ࣘ 1R
༟ࣘ ༟ࣘ 1R 1R
ᔷ
፯༟ࣘ1Rd፩ɝ67$57ܝdਗ਼ੂБ ༟ࣘ1Rٙ༶ᔷfʘܝdස৾˟הண֛ ٙ৾वࣛග'ZHOO7LPH dΎੂБ༟ࣘ 1RЇ1Rٙ༶ᔷf͵̙ஹഐʔΝ༶ᔷ ˙Σٙ༶ᔷ༟ࣘf
●●速度控制運轉
在輸入FWD信號或RVS信號的期間,馬達將連續運轉。由於是以事 先設定的運轉資料之轉速進行運轉,只要改變資料No.,即可進行多 段變速運轉。
৵༺ਗЪ
˙Σ г˙Σ
FWD፩ɝ
ON OFF
RVS፩ɝ
ON
OFF
M0äM5፩ɝ
ON OFF
01