潜艇战场目标概略位置态势快速判断及仿真
海上战役态势三维显示的研究与实现

海上战役态势三维显示的研究与实现
肖滨;王金树
【期刊名称】《系统仿真学报》
【年(卷),期】2008(20)14
【摘要】战役态势的三维显示为指挥者提供对战役态势直观明确和快速的理解,是提高指挥自动化程度的重要技术措施。
针对作战仿真中海上战役态势三维显示的需求,研究实现了地球遥感纹理的校正拼接以及与地形高程结合的三维漫游显示。
在此基础上,通过HLA接收仿真网络中的作战实体状态,将实体与环境进行合成,实现了卫星、舰艇和武器等多种作战实体的三维立体战役态势显示。
研究成果独立开发完成、并作为一个相对独立的联邦成员形式运行。
【总页数】4页(P3746-3749)
【作者】肖滨;王金树
【作者单位】海军潜艇学院
【正文语种】中文
【中图分类】TP319
【相关文献】
1.一种二维态势显示与三维视景一体化系统设计与实现
2.基于Unity3D的海战场三维态势实时显示系统设计与实现
3.指挥显示系统三维态势组件的设计与实现
4.海战场态势实时三维显示系统研究与实现
5.虚拟海战场态势三维显示系统设计与实现
因版权原因,仅展示原文概要,查看原文内容请购买。
潜艇作战环境及应对措施分析

潜艇作战环境及应对措施分析一、选题背景及意义1.1 选题背景介绍1.2 研究意义和价值1.3 国内外研究现状及不足二、潜艇作战环境分析2.1 战场环境的特点2.2 作战威胁的来源2.3 潜艇作战环境评估三、应对措施的分析3.1 潜艇武器系统的优化3.2 潜艇信号系统的改进3.3 潜艇装备系统的升级3.4 潜艇作战战术的优化3.5 人员技能水平与培训四、国内外潜艇作战案例分析4.1 欧美潜艇作战典型案例评述4.2 中国潜艇作战典型案例评述4.3 概述两种潜艇作战案例的主要特点五、发展方向及未来研究展望5.1 发展方向概述5.2 现有研究的不足和研究难点5.3 未来研究展望与建议注:以上仅为提纲建议,实际撰写时仍需结合具体情况进行调整。
一、选题背景及意义1.1 选题背景介绍潜艇作为一种特殊的武器装备,具有突击、隐蔽、灵活等作战优势,在现代战争中扮演着重要的角色。
然而,潜艇作战环境的极端复杂性以及传统潜艇在这种环境下面临的各种挑战和威胁,使得潜艇作战变得极其困难和危险。
如何面对威胁和挑战,提高潜艇的作战效能和生存能力,成为当前研究的重要内容。
1.2 研究意义和价值本研究旨在深入探讨潜艇作战环境及其应对措施,为提高潜艇作战效能和生存能力提供科学依据和技术支持。
具体来说,研究的意义和价值包括:(1)增强我国潜艇作战能力。
通过深入分析、评估潜艇作战环境,总结应对措施和经验,为我国潜艇提供有效的作战指导和技术支持,提高潜艇的作战效能和生存能力。
(2)推动潜艇技术创新。
研究潜艇作战环境及其应对措施,有助于探索潜艇作战的新思路、新模式和先进技术,推动潜艇技术的创新和发展,提高我国潜艇的综合作战能力。
(3)促进国际交流与合作。
本研究不仅对我国潜艇技术的发展具有重要意义,也为国际潜艇研究提供了新的思路和方法。
通过国际学术交流,可以了解国际先进潜艇技术的发展动态,借鉴国际经验,提高我国潜艇技术的水平和竞争力。
1.3 国内外研究现状及不足目前,潜艇作战环境及其应对措施的研究已经成为国内外学者关注的热点领域。
潜艇作战多目标感知和跟踪问题研究

潜艇作战多目标感知和跟踪问题研究
夏佩伦;武志东;野学范
【期刊名称】《舰船电子工程》
【年(卷),期】2015(000)009
【摘要】对潜艇在多目标环境下实施攻击作战中涉及的战场感知和目标跟踪问题进行了探讨。
根据多目标之间的关联性定义了两种多目标战场态势。
分别利用内部信息和外部信息两种情况,对多目标态势的感知与判断的有关问题进行了分析,给出了判断的基本原则和注意事项。
结合潜艇及其信息特点,对潜艇跟踪多目标的特有问题和难度进行了阐述。
最后梳理了多目标战场态势判断和多目标跟踪的关系。
【总页数】5页(P1-4,71)
【作者】夏佩伦;武志东;野学范
【作者单位】海军潜艇学院青岛 266042;海军潜艇学院青岛 266042;海军潜艇学院青岛 266042
【正文语种】中文
【中图分类】E925.66;E843
【相关文献】
1.潜艇跟踪过程中声呐浮标的作战使用 [J], 滕俊;邵晓方;吴昊
2.反潜直升机使用吊放声呐持续跟踪潜艇作战使用方法及其效能仿真 [J], 丛红日;郭晏宗;杨斌;粘松雷
3.基于双视线特征感知编组的多目标跟踪方法 [J], 陈曦;刘学斌
4.面向多目标跟踪的密集行人群轨迹提取和运动语义感知 [J], 游峰;梁健中;曹水金;
肖智豪;吴镇江;王海玮
5.空对空多目标跟踪攻击系统作战效能分析 [J], 崔翰明;李建勋
因版权原因,仅展示原文概要,查看原文内容请购买。
潜艇超视距攻击中目标可能位置域研究
中图分类号:E 1 97
文献标识码 :A
D : 03 6 di n17 .892 0 . .1 OI l.99 .s.6 33 1. 90 0 0 s 0 5
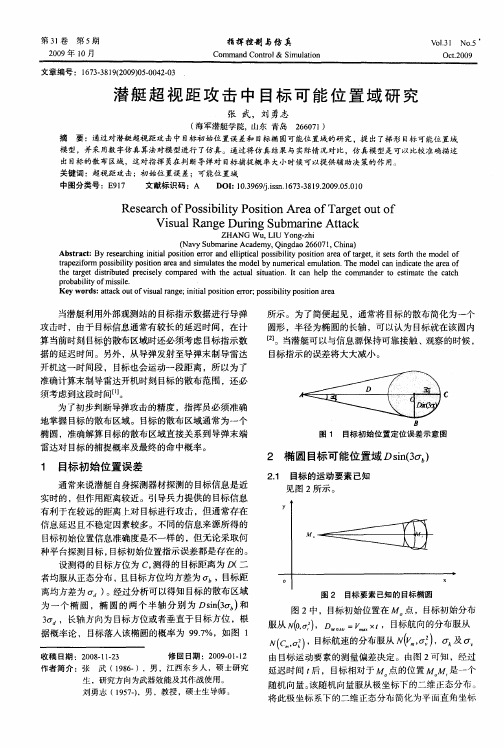
为一个椭圆, 椭圆的两个半轴分别为 Di3b和 s(r n c)
ZHANG u L U n ・ h W . I Yo g z i
( a yS b r e ae , ig a 6 0 C i ) N v u mai dmy Q n do2 6 7 , hn n Ac 1 a
Ab t a t sr c :By r s a c ig i i a o i o ro n l p i a p s i i t o i o r a o r e , ts t f r h d lo e e r h n n t l st n er ra d e l t l o sb l y p st n ae f a g t i es o t t e mo e f i p i i c i i t h t p z f r p s i i t o i o r a a d smu ae h d l y n me ia mu a in Th d l a n ia et ea e f r e i m o s l y p st n ae n i l tst e mo e b u r l a o b i i c e lt . e mo e c n id c t r a o o h t e t r e it b td p e iey c mp e t h c u l st ai n tc n h l h o h a g td sr ue r cs l o a d wi t e a t a i t .I a ep t e c mma d r t si t h a c i r h u o n e o et ma e t e c t h po a it f si . r b b ly o sl i mi e Ke r s a a k o t f iu l a g ; n t l o i o ro ; o sb l y p st n a e y wo d : u c u s a n e i i a st n e r r p s i i t o i o r a ov r i p i i i
潜艇作战三维视景仿真系统设计与实现

潜艇作战三维视景仿真系统设计与实现潜艇作战是一项十分复杂而又危险的任务,随着现代科技的发展,潜艇作战需要更加精准的计划和操作。
因此,为了让潜艇作战更加安全高效,需要一套潜艇作战三维视景仿真系统来进行武器系统的设计与实现。
潜艇作战三维视景仿真系统的设计包含多个方面。
首先,需要设计正确的计算模型,对各种不同情况下的水下运动进行仿真。
其次,需要通过加入潜艇的航行属性,采用海水运动的数学模型来动态计算当前环境下的航速和方向,以及风浪的影响。
其次,为了更好的显示,需要设计化雷达、声呐等多种设备的传感器数据,以便对电子系统进行仿真,方便操作员进行作战操作。
在三维视景仿真系统中,可采用虚拟现实(VR)技术,将潜艇环境进行真实的呈现。
在这种环境下,操作员可以通过控制台和模拟器设备模拟各个部位的控制器控制潜艇,包括舵和各种打击手段。
这样可以大大提高操作员的泳姿能力,保证操作人员对船舶设备的熟悉度和对作战环境的掌握程度。
在潜艇作战中,近距离作战以及鱼雷攻击是非常重要的部分,这需要一个复杂的武器系统来计算绝对成员之间的相对位置以及各种武器的工作方式。
同时,他还需要在计算压强和潜艇方向等参数的基础上精确地控制潜艇的航行方向。
在实现方面,潜艇作战三维视景仿真系统需要采用复杂的语言并结合一些强大的软件和硬件设备。
这个系统不仅需要计算和评估大量的物理规则和变量,还需要进行大量研究和不断改进。
例如,需要不断的研究和改进水下声纳,改进感应技术,以使其精度更高且更加快速。
总的来说,潜艇作战三维视景仿真系统需要在多个方面进行设计和实现,它不仅需要提供逼真的潜艇仿真,还需要具有高效性、准确性和操作性的平衡。
这项技术的开发和应用,将为潜艇作战成功保驾护航。
数据分析是一种将数据进行系统化分析的过程,目的是了解隐含在数据中的规律并通过这些规律作出有意义的决策。
下面将列举一些可能出现的数据,并进行分析。
1. 使用人数统计例如:一个电商网站的每日登录用户数数据分析:该数据反映网站的访问量和用户活跃度,从而能够分析网站用户的增长速度、稳定性和变化趋势。
基于PSO-RBF神经网络的海战场电磁态势预测
基于PSO-RBF神经网络的海战场电磁态势预测YANG Jie;CHENG Xiaojian;MU Yanbin【摘要】针对海战场电磁态势的预测问题,提出一种基于改进粒子群(PSO)优化径向基函数(RBF)神经网络的海战场电磁态势预测方法.该方法使用自适应惯性权重、模拟退火法和遗传算法对常规的粒子群算法进行改进,提高算法的搜寻精度和速度,并采用改进粒子群算法优化RBF神经网络参数,提高网络的学习效率和预测精度.最后,对海战场电磁态势值之间的非线性映射关系进行仿真预测.实验结果表明,该方法可以有效地提高海战场电磁态势的预测精度,具有较好的适用性.【期刊名称】《现代电子技术》【年(卷),期】2019(042)003【总页数】5页(P1-5)【关键词】海战场;电磁态势;神经网络;粒子群算法;模拟退火法;遗传算法【作者】YANG Jie;CHENG Xiaojian;MU Yanbin【作者单位】;;【正文语种】中文【中图分类】TN911.1-34;TP311.540 引言海战场电磁态势感知是一种通过对海战场电磁环境要素的获取、理解、预测而形成易于指挥员准确认识海战场电磁环境并能辅助其决策的方法[1]。
现有的态势评估方法大多只能提供给指挥员过去和当前的海战场电磁态势情况,无法预测下一阶段态势变化情况,使得己方在未来战争中处于被动状态。
因此,海战场电磁态势预测成为未来战场中亟待解决的问题。
目前国内外对于海战场电磁态势的研究主要集中在电磁环境可视化[2]、电磁环境复杂度评估[3]、辐射源识别[4]等方面,缺乏生成系统海战场电磁态势的技术手段。
文献[1]提出了海战场电磁感知的基本模型,但并未对态势理解域中的态势预测作进一步分析。
文献[5]将博弈论应用于战场通信对抗态势预测中,但预测结果误差较大。
径向基函数(Radial Basis Function,RBF)神经网络具有收敛速度快、结构简单、非线性映射能力好等特点[6],已广泛应用于模式识别[7]、网络安全态势预测[8]等领域。
潜艇鱼雷攻击海上目标射击阵位建模与仿真

Science and Technology & Innovation ┃科技与创新·13·文章编号:2095-6835(2016)17-0013-03潜艇鱼雷攻击海上目标射击阵位建模与仿真*徐君明1,李东兵2,罗木生1,徐珂文1(1.中国人民解放军海军航空工程学院,山东 烟台 264001;2.海军某专项办公室,北京 100036)摘 要:围绕海上目标规避机动时潜艇鱼雷射击阵位的计算问题,对无法及时规避的海上舰船、具有水下感知能机动规避的水面作战舰艇两类海上目标分别建立了理想条件下、海上目标规避机动时的潜艇鱼雷射击阵位定量计算模型,并仿真分析了两种情况下的射击阵位。
仿真结果表明,相比尾后方向,目标前方与侧前方的潜艇鱼雷射击阵位较远。
海上目标的规避机动压缩了目标前方与侧前方的鱼雷射击阵位,但对目标尾后方向的鱼雷射击阵位影响不大。
关键词:鱼雷;射击阵位;舰船;定量计算模型中图分类号:TJ630 文献标识码:A DOI :10.15913/ki.kjycx.2016.17.013潜艇具有优良的隐蔽性,可使用鱼雷等武器对海上目标实施近距离的致命攻击。
对于攻击效果而言,除了会受武器系统战技性能的制约外,还与潜艇发射武器时的射击阵位等因素密切相关。
因此,如何确定射击阵位,是潜艇使用鱼雷等武器实施攻击前需要解决的关键问题之一。
射击阵位是指潜艇使用武器对敌舰船进行攻击时相对被攻击目标的位置点。
由此可见,射击阵位主要取决于潜艇发射武器时,相对被攻击目标的舷角和距离两个因素。
目前,国内对潜艇占领射击阵位的研究较多,关于潜艇鱼雷武器系统的射击阵位的研究主要集中于可攻区域、利用多项式回归的方法得出等概率阵位图等,少有分析海上目标的规避机动对潜艇鱼雷攻击造成的影响。
下面基于理想条件、海上目标规避机动两种情况分别建立潜艇鱼雷射击阵位的定量计算模型。
1 理想条件下潜艇鱼雷射击阵位潜艇鱼雷射击阵位的确定需确保鱼雷发射出去后能在航程内与目标相遇,否则将无法命中目标。
潜艇不机动纯方位解算编队目标运动要素方法

潜艇不机动纯方位解算编队目标运动要素方法
武志东;朱伟良;李祥珂
【期刊名称】《指挥控制与仿真》
【年(卷),期】2013(035)002
【摘要】针对单艘潜艇纯方位目标定位必须潜艇机动才能使算法收敛的问题,首次采用几何分析法研究了潜艇不机动情况下,解算编队目标运动要素的方法;然后,基于最小二乘法,给出了具体的解算模型,并给定态势,进行实例仿真.证明该算法能够满足潜艇隐蔽对编队目标定位的需要,进一步丰富了潜艇纯方位目标定位方法.
【总页数】4页(P43-46)
【作者】武志东;朱伟良;李祥珂
【作者单位】海军潜艇学院,山东青岛266042
【正文语种】中文
【中图分类】E911
【相关文献】
1.潜艇纯方位解算目标运动要素中机动原则的确定 [J], 李华军
2.基于可重构计算的纯方位目标要素解算方法 [J], 宋奂寰;王树宗
3.一种目标运动要素纯方位解算方法 [J], 程善政;陈双;何心怡
4.一种目标运动要素纯方位解算方法 [J], 程善政;陈双;何心怡
5.单平台纯方位信息的水面编队目标运动要素解算 [J], 袁富宇;代志恒;肖碧琴因版权原因,仅展示原文概要,查看原文内容请购买。
潜艇巡航目标导航定位仿真研究
潜艇巡航目标导航定位仿真研究
宋召青;王康
【期刊名称】《计算机仿真》
【年(卷),期】2016(033)007
【摘要】在研究潜艇航行的导航定位问题中,潜艇远程长航时要求导航系统稳定.但是由于惯性导航系统元件陀螺仪会产生漂移误差,造成定位精度不准.为了确保潜艇的航行安全以及可靠性,需要保证潜艇长航时导航定位的精度.提出采用Delta算子高速采样方法,结合潜艇惯性导航系统误差模型,利用Delta算法对惯性导航系统误差方程进行解算,并进行常规卡尔曼滤波处理,实验结果表明,所得的经纬度定位精度较之传统的z域离散化解算方法优越,证明导航改进算法在高速采样情形下能有效提高潜艇长航时的导航定位精度.
【总页数】6页(P29-34)
【作者】宋召青;王康
【作者单位】海军航空工程学院七系,山东烟台264001;海军航空工程学院研究生管理大队,山东烟台264001
【正文语种】中文
【中图分类】TP2
【相关文献】
1.战斗机超速巡航目标优化控制仿真研究 [J], 崔玉伟
2.移动机器人地面目标导航定位仿真研究 [J], 张彤;冯磊
3.鱼雷弹道仿真中潜艇体目标建模与应用研究 [J], 聂卫东;康凤举;苏颖;褚彦军
4.鱼雷尺度靶模拟潜艇目标模型分析及仿真研究 [J], 邱政;张维全;蒋楚鸥
5.典型追击方式下Benchmark潜艇目标强度仿真研究∗ [J], 潘明; 邓伟
因版权原因,仅展示原文概要,查看原文内容请购买。
基于判别矩阵的潜艇作战态势认知决策建模方法
基于判别矩阵的潜艇作战态势认知决策建模方法潜艇作战是一项复杂的任务,需要潜艇指挥员根据当前的态势信息做出正确的决策。
为了帮助指挥员更好地认知决策,可以采用基于判别矩阵的方法进行建模。
判别矩阵是一种多指标决策分析方法,可以用来评估不同方案的优劣。
在潜艇作战中,可以将判别矩阵应用于态势认知和决策过程中。
以下是一个基于判别矩阵的潜艇作战态势认知决策建模方法的示例。
首先,需要明确决策的目标。
在潜艇作战中,可能存在多个目标,如保护自身安全、确保任务完成等。
根据实际情况,确定需要评估的指标。
然后,根据指标的重要性,确定权重。
可以采用专家意见调查、层次分析法等方法来确定指标的权重。
权重表示各指标在决策中的重要性,可以根据实际情况进行调整。
接下来,通过收集各指标的数据,并将其归一化,以便在同一量纲下进行比较。
归一化方法可以采用最大最小值法、标准化法等。
然后,建立判别矩阵。
判别矩阵由各个指标之间的对比所得,用来评估不同方案在不同指标下的优劣。
判别矩阵的大小与指标的数量有关,可以通过判别矩阵的行列之和为1来保持一致性。
最后,计算各方案的得分。
将判别矩阵与归一化后的指标数据相乘,并将得到的矩阵的行向量之和作为各方案的得分。
得分越高,表示对应方案在各个指标下的表现越好。
通过以上步骤,可以建立一个基于判别矩阵的潜艇作战态势认知决策模型。
指挥员可以根据各方案的得分来评估不同方案的优劣,并做出相应的决策。
需要注意的是,在实际应用中,可能会遇到数据不准确、指标权重不确定等情况。
为了提高模型的可靠性和实用性,可以采用敏感性分析、蒙特卡洛模拟等方法进行模型验证和优化。
总之,基于判别矩阵的潜艇作战态势认知决策建模方法可以帮助指挥员更好地理解和分析当前态势信息,并做出正确的决策。
通过对指标的评估和权重的确定,可以对不同方案进行综合比较,提供决策支持。
这种方法具有较强的灵活性和可扩展性,适用于不同类型的潜艇作战任务。
潜艇在水面目标位置散布概率密度的计算方法
引 言
在 一些 特 殊 情况 下 , 潜 艇 可 以利 用 声 纳设 备 在
建立 平 面直 角坐 标 系 。
已知 : 初 始 时刻 潜 艇 探 测 和解 算 的 目标 运 动 要
素为方位( F ) 、 距离( D) 、 速度 ( V) 、 航 向( 日) , 4个 量 有 独 立 的密 度 函数 , 服从正态分布 , 其 标 准 差 分 别
Ob j e c t L o c a t i n g o f S u b ma r i n e
HU ANG We n - b i n, YU Xu e - y o n g , L I B e n - c h a n g
( N a v y S u b m a r i n e A c a d e m y , Q i n g d a o 2 6 6 42 0 , C h / n a )
c o mp a r e d wi t h ma p ma d e b y c o mp u t e r s i mu l a t i o n me t h o d . Ke y wo r d s :s u b ma r i n e , p r o b a b i l i t y d e n s i t y , n o r ma l d i s t r i b u t i n g , t a r g e t mo t i o n p a r a me t e r , s i mu l a t i o n
为 , 、 O " D 、 、 o r , 其中心值分别为 R、 D 。 、 、 日 。 。 求: 时刻 目标 位置 点 ( , ) 的分 布概率 密度 。
2 问题 的求解思路
时 刻 目标 的位 置 ( , y ) 可 由 目标运 动 要 素 , 即
潜艇在水下如何探测目标?

潜艇在水下如何探测目标?核潜艇在水下航行,是如何发现和识别目标的?几百米水下,伸手不见五指,战时,潜藏于海的潜艇如何识别出几十公里外的目标,它到底是敌舰还是我舰?仔细一想,这似乎挺难的。
核潜艇在水下潜行,它用来发现和识别目标的“眼睛”,就是声呐。
对核潜艇来说,声呐是它的最重要侦察监视设备,主要用于对水中目标搜索、警戒、识别、跟踪、监视和运动要素的测定,还可以进行水下通信和导航,保障潜艇的战术机动和水中武器的使用。
从结构组成来看,核潜艇上装备的声呐一般由基阵、电子机柜和辅助设备三部分组成,上述基阵中包含的水声换能器是声呐中的关键器件,它有两个用途:一是在水下发射声波;二是在水下接收声波。
核潜艇上装备的声呐,主要有两种,即主动声呐和被动声呐,平时状态下主要以被动声呐为主。
主动声呐是指声呐主动发射声波“照射”目标,而后接收水中目标反射的回波以测定目标的参数,主动声呐大多数采用脉冲体制,也有采用连续波体制的。
核潜艇在水下使用主动声呐来识别和探测目标的工作原理大致如下:首先,主动地发射声波,形成单个或多个具有一定扇面的指向性波束,或以全向的声脉冲信号向水中辐射;其次,接收由目标反射的回波,回传到声呐接收基阵,被转换成电信号,经一系列相关处理,在背景噪声中提取有用信号;最后,再经信号的后置处理,加工成适于各种终端显示或计算机处理的目标信息,输入终端设备进行显示或记录即可。
难就难在,你不能主动发信号。
比如,你用声呐向对方喊话:我是土豆,请问你是不是黄瓜?假如对方不是黄瓜,3枚鱼雷就会向你射来……潜艇最大优势是隐蔽,它们最擅长,也最喜欢干的事就是打黑枪。
若失去隐蔽,也就同时失去了自身最大的优势。
因此,主动发信号还有另一个弊端:即,你的核潜艇本来非常先进,静音性能超棒,你发现了20多公里远处,有一艘潜艇在活动。
但那艘未知潜艇本来还没有发现你,而你却主动打开声呐发信号,于是,你变透明了。
你说亏不亏?既然不能主动发信号,那怎么办?难道就这么僵持着?潜艇声纹识别未见其人,先闻其声。
潜艇运动仿真及航行试验评估方法_黄利华
3)最开始的模型集是由一些被称为线性状态空 间模型组成 。数据将进行相应的转换 , MATLAB允许 对空间模型进行广泛的定制 (例如固定某些参 数的 值以及指定需要进行评估的参数 )。
潜艇运动仿真所用数学模型是 Feldman(1979) 描述 的 空间 运 动 方程 的 扩展 。 仿真 过 程 是 在 FORTARN环境下进行的 , 通过命令文件或通过操纵 杆的交互方式输入到程序 。
以地面右手直角坐标系为惯性参考系 , Eζ轴指向 地心 , Eξ轴和 Eη轴在水平面内相互垂直[ 3] (见图 1)。
潜艇运动 仿真是在不同的输入条件下 (初始条 件 、给定的航速 、给定的舵角 、重力和浮力的变化 )对 6个自由度空间运动 (纵向 、横向 、垂向 、横摇 、纵摇 、 偏航 )上进行仿真的 。
1967 年 美 国 海 军 舰 船 研 究 和 发 展 中 心 (DTNSRDC)Gertler和 Hagen发表了潜艇空间标准运 动方程 [ 1] 。这个方程是建立在大量船模试验 (约束 船模和自由航模 )和试验结果的处理上 , 该标准方程
在方案的不同阶段 , 这些参数的值通过不同的方法获 得 。在设计和方案确立阶段 , 这些参数都是通过模型 计算或外推得来的 。其后得到艇的几何外形 , 通过模 型试验求测到水动力系数 。 交付前 , 这些数值必须经 过海上试验评估进行验证 。 由于模型试验的局限性 和海上测量的限制 , 有些系数仅仅只 能得到部分确 认 。如使用平面运动机构 (PMM)[ 6] 模型试验无法进 行任何转向和纵摇叠加运动的测量 。 即使在海试中 , 目前也没有真正令人满意的测量横向速率的方法 。
基于改进板块元法的潜艇目标强度预报仿真

基于改进板块元法的潜艇目标强度预报仿真孙乃葳;李建辰;万亚民;赵罡;吕维;范若楠【摘要】针对板块元法计算潜艇目标强度时积分分母可能为零,从而导致计算结果不稳定的问题,文中将Gordon积分算法用于潜艇目标强度的预报仿真,并针对复杂目标简化面元遮挡判断流程,首先对刚性球体进行建模计算,其次对Benchmark潜艇进行3D建模,运用改进板块元法对潜艇目标强度进行预报.仿真结果表明,改进模型的计算结果更加稳定,能够较好反映潜艇目标强度的特征.【期刊名称】《鱼雷技术》【年(卷),期】2016(024)004【总页数】6页(P254-259)【关键词】潜艇;板块元;Gordon积分;遮挡判断;目标强度预报【作者】孙乃葳;李建辰;万亚民;赵罡;吕维;范若楠【作者单位】中国船舶重工集团公司第705研究所,陕西西安,710077;水下信息与控制重点实验室,陕西西安,710077;中国船舶重工集团公司第705研究所,陕西西安,710077;中国船舶重工集团公司第705研究所,陕西西安,710077;中国船舶重工集团公司第705研究所,陕西西安,710077;中国船舶重工集团公司第705研究所,陕西西安,710077;中国船舶重工集团公司第705研究所,陕西西安,710077【正文语种】中文【中图分类】U674.941;TB566有效获取潜艇目标强度特性是主动声呐探测的关键技术之一,准确掌握目标在不同态势下的目标特性,对鱼雷等水中兵器的目标检测、参数估计具有十分重要的意义[1]。
当今,鱼雷和声呐技术的发展,要求目标回波特性预报的精度更高。
目标强度预报关键在于求解 3D流体空间中的目标受声波激励产生的满足表面边界条件、波动方程和辐射条件的散射声场[2]。
分离变量法虽然是求解波动方程的重要方法,但它只能应用于那些表面能用正交曲线坐标表示的规则形状物体,从而限制了它的应用范围。
Helmholtz积分方法可以在远场条件下,求解形状较复杂物体的散射声场。
基于潜艇分布式建模的目标识别方法

基于潜艇分布式建模的目标识别方法
董仲臣;李亚安;黎阳;刘望生
【期刊名称】《鱼雷技术》
【年(卷),期】2014(022)003
【摘要】为了使鱼雷更好地识别潜艇结构,从而有效区分潜艇和声诱饵,提出了一种基于分布式目标建模的潜艇目标识别方法.该方法在分布式目标建模理论的基础上,建立了潜艇分布式目标模型,并把分布式信号参数估计(DSPE)方法应用到潜艇分布式模型方位估计中,同时利用平面阵进行了计算机仿真,得到了潜艇回波的3D方位谱.仿真结果表明,该方法能很好的对潜艇结构进行识别,有助于鱼雷实施正确的攻击.【总页数】5页(P174-178)
【作者】董仲臣;李亚安;黎阳;刘望生
【作者单位】中国人民解放军91388部队,广东湛江,524022;西北工业大学航海学院,陕西西安,710072;中国人民解放军91388部队,广东湛江,524022;浙江理工大学机械与自动控制学院,浙江杭州,310018
【正文语种】中文
【中图分类】TJ630.1
【相关文献】
1.基于分布函数的潜艇目标强度统计建模 [J], 孙乃葳;李建辰;万亚民
2.基于分布函数的潜艇目标强度统计建模 [J], 孙乃葳;李建辰;万亚民
3.一种基于亮点模型的潜艇目标尺度识别方法 [J], 董仲臣;李亚安;尚进;刘望生
4.基于分布函数的潜艇目标强度统计建模 [J], 孙乃葳;李建辰;万亚民
5.基于多源信息融合的潜艇目标识别方法研究 [J], 郑文恩;孙尧
因版权原因,仅展示原文概要,查看原文内容请购买。
航母编队反潜目标识别和威胁评估仿真
文章编号:1002-0640( 2019 )03-0153-06
火力与指挥控制 Fire Control & Command Control
第44卷第3期 2019年3月
航母编队反潜目标识别和威胁评估仿真
陈龙打马亚平2 (1.国防大学研究生院,北京1000912国防大学公共平台中心,北京100091)
2.National Defense University Public Platform Center、Beijing 100091, China )
Abstract: Bayesian network model is a kind of effective quantitative analysis method for target recognition and threat assessment. The Bayesian network model is used to identify underwater targets and assess threat levels in aircraft carrier battle operations for the first time. Firstly, the bayesian network model of target recognition and threat assessment is constructed according to the actual situation of the troops; Secondly, the condition probability table is constructed based on the force practice data,the institution expert and the access information,which conforms to the actual situation; Finally,the underwater targets are identified and threat level is evaluated by simulation experiments, the validity of the Bayesian network on the target identification and threat assessment of the aircraft carrier formation is verified by the relevant data of the comparative forces,which can provide some
径向基神经网络在潜艇战场态势判断中的应用
径向基神经网络在潜艇战场态势判断中的应用
孟范栋;黄文斌;李斌
【期刊名称】《火力与指挥控制》
【年(卷),期】2008(033)010
【摘要】潜艇的战场态势判断是潜艇作战中的重要环节.一般情况下,对于战场态势是基于指挥员经验而判断的,其准确性不好,较强地依赖于战场指挥员的战术素养.由于不同潜艇战场态势决定不同目标的方位序列,提出了一种利用概率型径向基神经网络的方法,并通过目标方位序列与目标态势的一一对应关系,进行战场态势的判断.结果表明该方法具有较好的识别能力.
【总页数】3页(P110-112)
【作者】孟范栋;黄文斌;李斌
【作者单位】海军潜艇学院,山东,青岛,266071;海军潜艇学院,山东,青岛,266071;海军潜艇学院,山东,青岛,266071
【正文语种】中文
【中图分类】TN973
【相关文献】
1.D-S证据理论在潜艇威胁判断中的应用 [J], 黄文斌;陈颜辉;张宁
2.模糊模式识别在潜艇威胁等级判断中的应用 [J], 俞骏;刘以安
3.认知技术在战场态势感知中的应用 [J], 刘科
4.认知技术在战场态势感知中的应用 [J], 刘科
5.关键征候在潜艇威胁判断中的应用 [J], 魏勇;徐延学;何洪亮;王洋
因版权原因,仅展示原文概要,查看原文内容请购买。
基于判别矩阵的潜艇作战态势认知决策建模方法
基于判别矩阵的潜艇作战态势认知决策建模方法
张东俊;王维平;黎潇;张磊;李小波;刘国杰
【期刊名称】《系统仿真学报》
【年(卷),期】2020(32)2
【摘要】潜艇作战具备复杂环境中的动态博弈对抗特点,作战人员的态势认知与决策行为对潜艇作战效能有着重要影响。
针对潜艇交战级作战实验中的态势认知决策建模难题,在分析态势认知决策过程的基础上提炼表征变量集合,提出基于判别矩阵的潜艇作战态势认知决策建模方法,并以某型潜艇交战级对抗为例研究给定想定条件下的态势认知决策过程,验证了方法的可行性和有效性。
建立的模型能够有效刻画作战人员认知决策过程,支持潜艇作战实验中的交战机理和制胜机理研究。
【总页数】9页(P182-190)
【作者】张东俊;王维平;黎潇;张磊;李小波;刘国杰
【作者单位】92337部队;国防科技大学系统工程学院
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于信息流的潜艇作战系统作战能力试验方法研究
2.潜艇作战系统的服务描述与建模方法研究
3.基于Agent的潜艇作战推演业务建模与仿真
4.面向潜艇作战实验的认知驱动战能环融合控制方法
5.基于模糊灰色认知图的复杂战场智能态势感知建模方法
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文 章 编 号 :06— 3 8 2 1 )2— 0 8— 4 10 9 4 (0 0 1 00 0
计
算
机
仿
真
21年1月 0 0 2
潜 艇 战 场 目标 概 略 位 置 态 势 快 速 判 断 及 仿 真
黄文斌 , 范栋 孟
( 军潜 艇 学 院 , 海 山东 青 岛 26 7 ) 60 1
位置和运动参数 。而在得到解算结果 之前 的这段 时间内 , 作
1 引言
潜艇 战场 目标位 置态 势判断 主要是利 用潜艇 传感器测 得的信息来获取 目标 的位置和运动趋势 , 它是潜艇作 战过程 的重要环 节 , 是进行其 它战术 决策 的重要前 提 , 判断 时问 其 直接决定着作 战系统 的反应时间 。 目前潜艇进行 目标 位置 态势判 断主要 方法有 两方位两
c n o e c me t e n n—l e ra d n n—sa i t f h z t e u n e n e etrfr c si g r s l i a e o a v r o h o i a n o n tb ly o e a i h s q e c ,a d g t t e a t e ut n c s f i t mu b e o n l t n o mai n h h e a tr f h a g t i ain a e dv d d t o i et பைடு நூலகம் df r n e id ,a d t e a i i l if r t .T et r efc oso e tr e t t r ii e c mb n h i e e t yk n s n h z— te o t su o o r g muh s ti o ti e ru h s lt n t e s b an d t o g i a i .Us gt e ge r n eai n r d h mu o i ry t d r lt a g a e.c n i e n e“ p r a hn ’ n ’ n h e ol o s r gt di h a p o c i g’a d ’ c mp rb l y o aa i t ”,t e t g t i ain i c u r d i h a e t t sa q i .An e a l sg v n t h w a h d l a e e tre i a r su o e x mp e i i e o s o t tt emo e n g t h a g tst - h c t u
d i n a k ru dv leG 1 1 f h e m na o o e ,uigG e y t r at z uh sq e c io a d b c go n a M( , )o esg e tt n m d l s ryS s m t f e s a i t e u n e tn u t i n e Ooc m
t n q ik y n rv d h r f a l n omain f rs b r e i u c l ,a d p o i e t e p o tb y if r t o u ma n . o i o i
K Y OR S: r yt E W D Ge ss m; r edr aos T re ruhPsinStao ; uc eio y e G e t n l i ; agt og oio i t n Q i dc i yr e tn t ui k sn
摘要 : 研究 目标 战场 的辨识优化问题 , 关于潜艇战场环境 中目标的位置态势是潜艇作战的关键要素 , 能否快速对 目标的位置 态势做出判断对取得战场主动权起着决定性作用。提 出应用灰色系统理论 , 建立了潜艇 战场 目标概略位置态势快速判断的 总体框架 , 以改进初值和背景值的 G 1 1 模 型分段对 目标序列进行预处理 , M( ,) 应用灰色趋 势关 联度 , 综合考虑 目标 方位序 列之间的距离差异和变化趋势差异 , 从而得到 目标 的战场态势。选取适 当的样本 、 并设定样本 的误差和收敛条件 , 进行仿真 试验。由仿 真结果可 以看出 , 应用灰色系统理论可 以在短时 间内对 目标 的位置 态势做 出较 准确 的识别 , 满足 了精度 的 并
t n s se i y t ms,a d i h mpo tn r mief rt e d cso a ig o u o n st e i ra tp e s o h e iin m kn fs bmai e . Ba e n t di e nta o ・ rn s s d o hemo f d i iilc n i
要求 。
关键词 : 灰色模 型; 灰色趋势关联 ; 目标概略位置态势; 快速判断
中图 分 类 号 :N 1 T 9 文献 标 识 码 : A
S m u a i n Re e r h o b a i r e i l to s a c n Su m rne Ta g t
R u h P s in StainQuc cs n o g oio i t ikDei o t u o i
HUANG e W n—b n. i MENG a F n—d n o g
( aySb a n cdm ,QndoS adn 6 0 1 C ia N v u m r e ae y iga h nog2 67 , hn ) i A
ABS RACT:T etr e i ai n e t t n o e s b rn at f l st e i o tn a tri u ma n p r — T h a g ts u t si i f h u ma i e b t e ed i h t o ma o t li mp r t co s b r e o ea a f n i