卸船机说明书
卸船机操作手册
1.序言由上海振华港口机械(集团)股份有限公司制造的三台四卷筒差动补偿绳索牵引桥式抓斗卸船机,具有先进的操作和保护系统,作为原煤码头前沿的重大设备,卸船机的所有操作人员和管理人员必须熟悉有关规程及说明。
本操作说明是对卸船机操作规程重要部分的摘要,阐述卸船机机械设备原理和操作步骤,此外,下面几点必须注意:1)卸船机司机应由身体健康,并经严格考试,考核合格的人员担任,严禁其他人员操作,无关人员不准接近卸船机。
2)只有正确操作和维护才能使卸船机工作安全,延长使用寿命。
3)严禁超负荷运行,卸船机司机头脑必须十分清醒,万一发生危险,应知道在该机何处切断电源,立即停机,以免事故出现或扩大。
4)本使用手册只用作操作指南,以便让卸船机司机熟知正确的操作和维护方法,该说明不能取代各单位制定的事故防止规程及安全生产的细则,以杜绝或防止因操作不当引起的损失。
2.概述卸船机总图,图号为UL190000本卸船机为四卷筒差动补偿牵引小车桥式抓斗卸船机,可沿码头轨道作工作或非工作性运行,有效工作运行距离为±170米,本机用于卸原煤(原煤容重为0.85~1.0t/m3),卸煤能力为1500t/h,最大卸煤能力为1800t/h。
原煤经3.5~5万吨级运输船运至码头,由抓斗将原煤卸进料斗,卸船机最大外伸距为30米,(海侧轨道中心至小车在海侧末端尽头的距离)。
然后,原煤由供料皮带机从料斗排出,再经由可切换的分叉漏斗有选择地送到安装在码头上的两条地面皮带机中的其中一条上,再将原煤输送到转运楼。
本机自设的缓冲托辊组,可降低物料对地面皮带机系统的冲击。
通过料斗四周的防尘挡板以及喷水系统来防止粉尘的飞扬,在料斗上方装有供水管道及喷嘴,管道的水由本机自带的水箱及水泵输出,由水缆卷筒从码头各供水点处将水输送到水箱中。
卸船机还装有安全锚定装置及防风可调节的刚性拉杆,以在非工作状态时防台抗风。
本机海侧主梁可仰起80°,不妨碍船的靠岸,离港等作业。
600t 桥式抓斗卸船机维护使用手册

600t/h桥式抓斗卸船机维护使用手册目录1序言 (5)2概述 (5)2.1 卸船机的构成及典型图_______________________________________________ 62.1.1 卸船机主要组成的机械部件 (6)2.1.2 技术图纸 (6)2.2 卸船机主要技术参数_________________________________________________ 6 2.2.1 额定能力_________________________________________________________ 62.2.2 物料 (7)2.2.3 速度 (7)2.2.4 净空 (7)2.2.5 行程: (7)2.2.6 整机行走参数: (7)2.2.8 供电方式 (8)2.2.9 供水方式: (8)2.3 卸船机的操作安全注意事项___________________________________________ 82.3.1 一般事项 (8)2.3.2 卸船机运转前的正常检查 (9)2.3.3 卸船机作业后的注意事项 (9)2.3.4 基础 (10)3机械装置说明 (10)3.1 大车运行机构 (12)3.1.1 构造及性能 (12)3.1.2 维修和保养注意事项 (13)3.1.3 解体和组装 (13)3.1.4 注意事项 (14)3.1.5 重要注意事项 (15)3.2 电缆卷筒装置______________________________________________________ 153.2.1 组成 (15)3.2.2 解体和组装 (16)3.2.3 注意事项 (16)3.2.4 参阅图纸资料 (16)3.3 喷水压尘系统______________________________________________________ 163.3.2 注意事项 (17)3.3.3 参阅的图纸和资料 (17)3.6漏斗系统_________________________________________________________ 183.6.1 漏斗系统的构成和性能 (18)3.6.2 维护保养注意事项 (18)3.6.3 阅图纸和资料 (19)3.7漏斗后部防风板装置。
卸船机抓斗设定操作说明
司机操作指导――――――――――――――――――――――――――――――――――――――――――工况的选择:支持单机: 将支持单机/抓斗/开闭单机转换开关切换到“支持单机”位置。
开闭单机: 将支持单机/抓斗/开闭单机转换开关切换到“开闭单机”位置。
抓斗: 将支持单机/抓斗/开闭单机转换开关切换到“抓斗”位置。
――――――――――――――――――――――――――――――――――――――――――位置设定:司机作业前有必要对抓斗进行初始化位置设定选择抓斗工况将设定/工作转换开关切换到“设定”位置进行位置设定(详细方法见附件)将设定/工作转换开关切换到“正常”位置,开始作业。
――――――――――――――――――――――――――――――――――――――――――操作说明:1. 开斗手柄往开斗方向移动,直到抓斗完全打开可以全速开斗,当到达减速位置时设备将自动降低电机速度,到达终点将自动停止。
2. 闭斗手柄往闭斗方向移动,直到抓斗完全闭拢自动抓斗设定步骤――――――――――――――――――――――――――――――――――――――――――第一步:将设定/正常转换开关切换到“设定”位置。
第二步:空中将抓斗打开到最大位置,手柄回零位。
第三步:按一下开斗设定按钮。
第四步:空中将抓斗关闭好,手柄回零位。
非常重要:必须闭斗刚刚好,不能闭过,也不要留缝隙。
第五步:按一下闭斗设定按钮。
第六步:将设定/正常转换开关切换到“正常”位置。
第七步:为了使设定更加精确,最好能抓一斗料,拉到空中,当抓斗完全闭拢且4条钢丝绳同时张紧受力时,将设定/正常转换开关切换到“设定”位置。
设定按下闭斗设定,将设定/正常转换开关切换到“工作”位置。
第八步:设定完毕,开始作业。
司机操作开闭斗时,手柄打最高档位,直到电机自动减速和停止,无需人为减速。
―――――――――――――――――――――――――――――――――――――――――――――――注意事项:1 设定时,必须先清零即将开斗设定和闭斗设定的按钮按住直到有灯亮,然后先设定开斗位置,然后才能设定闭斗位置。
卸船机——精选推荐
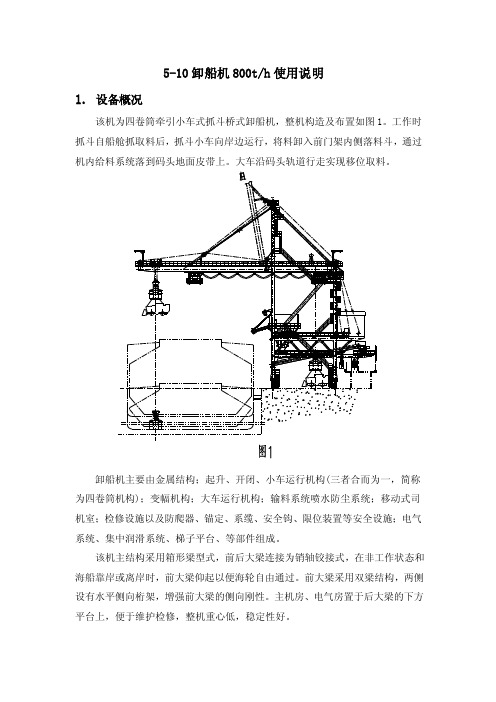
5-10卸船机800t/h使用说明1. 设备概况该机为四卷筒牵引小车式抓斗桥式卸船机,整机构造及布置如图1。
工作时抓斗自船舱抓取料后,抓斗小车向岸边运行,将料卸入前门架内侧落料斗,通过机内给料系统落到码头地面皮带上。
大车沿码头轨道行走实现移位取料。
卸船机主要由金属结构;起升、开闭、小车运行机构(三者合而为一,简称为四卷筒机构);变幅机构;大车运行机构;输料系统喷水防尘系统;移动式司机室;检修设施以及防爬器、锚定、系缆、安全钩、限位装置等安全设施;电气系统、集中润滑系统、梯子平台、等部件组成。
该机主结构采用箱形梁型式,前后大梁连接为销轴铰接式,在非工作状态和海船靠岸或离岸时,前大梁仰起以便海轮自由通过。
前大梁采用双梁结构,两侧设有水平侧向桁架,增强前大梁的侧向刚性。
主机房、电气房置于后大梁的下方平台上,便于维护检修,整机重心低,稳定性好。
该机机构设计中采用四卷筒机构牵引方式,小车自重轻,绳系简单,钢绳对大梁的作用力小,更换方便。
导向滑轮采用高强度尼龙滑轮,可以有效地延长钢绳寿命。
起升、开闭、小车运行机构,变幅机构,均采用交流供电--交流变频拖动的调速系统。
通过PLC可编程序控制器实现半自动或手动操作卸料。
大车运行机构用交流变频电机拖动,机内接料系统及其它机械设备均采用交流供电和交流电机拖动。
各机构的动作可以在移动的司机室内的联动台上控制或就地操作,移动式司机室在轨道上独立运行,并能选择最佳视野进行操作。
供料系统中的料斗下口出料采用振动给料机,通过船型三通给码头胶带机供料;料斗等几个粉尘污染点分别设有落料回收板、料斗挡风板、水喷雾系统等防尘设施。
为方便检修大车机构,门腿下部设有顶升支承。
该机配有多种限位保护系统、联锁限位装置、通讯联系系统,保证卸船机工作可靠、安全。
该机供电为6000V,50Hz,采用电缆卷盘上电,卷绕电缆长度可供卸船机在250m的轨道范围内行走;通过六芯多模光纤与地面进行通讯联系及码头皮带连锁;设有一个供水水箱,以保证卸船机在作业过程中同时向机上供水喷淋。
ZQX抓斗卸船机说明书
ZQX-800抓斗桥式卸船机使用说明书(电气部分)目录1、概述2、配电系统3、煤系统4、水系统5、司机室运行6、司机室操作7、机房操作8、变幅室操作9、其它1、概述本设计为ZQX-800抓斗桥式卸船机的电气部分,包括卸船机的起升、开闭、小车运行、变幅、大车运行、移动司机室、机内输煤系统等机构电气设备的配电、控制,以及照明、通风、通讯等等。
1.1本机供电电源为高压6KV,3相,50HZ,用高压电缆(GKFB-3*35+1*16)从码头高压接线箱经动力电缆绞盘引上卸船机;本机与地面的通讯(包括电话、信号联锁等)用扁电缆(YFFB-JLF12*1.5+6PX1.5+2L)从码头控制接线箱经控制电缆绞盘引上卸船机。
全机用电设备总容量约为750kW。
1.2 本机作为电厂输煤系统的主要设备之一,要求其控制性能好,可靠性高,因而电气控制的核心部分采用具有国际先进水平的施耐德公司德产品,从国外直接进口,主要有:z保护配电柜z起升柜z开闭柜z小车/变幅柜z联动控制台及椅子z MAGELIS显示屏z机房操作箱z变幅室操作箱z通讯电缆z光电编码器、测速发电机、行程开关等检测元件进口设备的使用及维修请参考施耐德公司提供的图纸及说明书。
1.3本机司机室内安放联动控制台、MAGELIS显示屏、司机室照明配电箱、风速仪、扩音机、抓斗称重记录仪、空调等;变压器房内安放主、副变压器及大车电阻器;电气房内安放进线柜、主变柜、副变柜、保护配电柜、起升柜、开闭柜、小车/变幅柜、大车柜、辅机配电柜、煤水系统柜、煤斗称重仪、电气室照明箱、电气室检修箱、空调等;变幅室内安放变幅操作箱、变幅室照明箱等;机房内安放机房操作箱、机房照明箱及机房检修箱、穿绳机构控制箱等;其它电气设备安放在相关机构旁,参见电气设备布置示意图(HX41.1.9.1)2、配电系统配电系统分高压配电和低压配电。
2.1 高压配电高压配电柜采用上海电器成套厂生产的KYN1-10型高压开关柜,共三个,分别为进线柜、主变压器柜和辅变压器柜,三个柜中都有真空断路器。
卸船机安全作业指导书

卸船机安全作业指导书第一章前言1.1 编写目的卸船机是一种专用设备,广泛应用于港口、码头等地方进行装卸作业。
为了保障卸船机的安全运行,本指导书旨在规范卸船机的安全作业流程,明确相关安全要求,提高作业人员的安全意识和技能水平,确保作业过程中的安全。
1.2 适用范围本指导书适用于卸船机的安全作业,包括但不限于以下内容:- 卸船机的基本知识和操作要求;- 卸船机的安全设备和保护装置;- 卸船机作业过程中的安全操作流程;- 卸船机的日常检修和维护要点;- 突发情况和事故处理应急措施。
第二章卸船机的基本知识和操作要求2.1 卸船机的组成卸船机主要由以下几个部分组成:- 主要结构:包括上部旋转平台、大臂、小臂、吊钩等;- 底座:用于支撑和固定卸船机;- 升降机构:用于升降卸船机的各个部件;-甲板大臂:用于从货船上拾起或放下货物;-架上小臂:用于抢放货物的辅助臂。
2.2 卸船机的操作要求- 操作人员应具备相关操作证件,并经过专业培训;- 操控操作杆时应注意力集中,熟悉各个控制杆的功能;- 严格按照操作规程操作,不得私自更改任何设备设置;- 作业前应检查设备是否正常运行,必要时进行试运转。
第三章卸船机的安全设备和保护装置3.1 安全设备卸船机应配备以下安全设备:- 重载保护装置:当吊钩超载时,及时发出警报并停机;- 轨道平衡装置:保持卸船机稳定运行,防止侧倾;- 紧急停机装置:在紧急情况下,按下按钮即可快速停机;- 环保装置:卸船机作业时应保证低噪音、低振动。
3.2 保护装置卸船机应配备以下保护装置:- 防护网:防止货物从高处坠落,保护作业人员的安全;- 安全护栏:限制非作业人员进入危险区域;- 限位开关:在卸船机运行过程中,确保其运行在安全范围内;- 火花防护装置:防止发生安全事故。
第四章卸船机作业过程中的安全操作流程4.1 作业前准备- 检查卸船机和周围环境是否存在安全隐患;- 检查设备的工作状态,确保正常运行;- 检查货物的包装和固定情况,确保安全装卸。
卸船机使用维护说明书

XCJLD1000型浮式悬链斗卸船机使用维护说明书武汉电力设备厂二OO七年三月目录第一章概述 (4)1 主要机构及作用 (4)2 技术参数 (5)3 XCJLD1000型浮式卸船机工作级别 (8)第二章各机构工作原理及性能 (9)1 横移机构 (9)2 链斗机构 (10)3 悬臂梁 (17)4 接料皮带机 (20)5 移船系统 (22)6 立柱 (27)7 配重系统 (28)8 升降机构 (31)9 润滑系统 (33)10 电气系统 (33)第三章链斗卸船机的操作 (35)1 链斗卸船机使用前的注意事项 (35)2 链斗卸船机工作状态下的操作 (35)3 链斗卸船机非工作状态下的操作 (37)附录1易损件明细表 (37)附录2密封件明细表 (39)附录3润滑周期表 (41)附录4 所用轴承一览表 (42)附图1 XCJLD1000型浮式悬链斗卸船机 (47)附图2 横移小车 (48)附图3 链斗机构 (49)附图4 悬臂梁 (50)附图5 接料皮带机 (51)附图6 移船系统 (52)附图7 立柱 (53)附图8 配重系统 (54)附图9 提升机构 (55)附图10煤斗 (55)第一章概述悬链式链斗卸船机是一种高效连续式卸船机,它以链条为牵引构件,以料斗为承载兼取料构件。
料斗按一定节距固定在链条上,呈封闭环状,在料层中靠重力自行取料,取料段呈自由悬垂状,故称悬链式链斗卸船机,简称悬链斗卸船机。
巴陵石化XCJLD100型悬链斗卸船机固定在趸船上,趸船随长江水位垂直波动,故又称浮式悬链斗卸船机。
XCJLD1000悬链斗卸船机额定生产率为1000t/h,瞬时最大生成率为1200t/h。
该台机为双排链斗。
料斗挖取煤炭后垂直输送到接料皮带机上,由接料皮带机水平和倾斜输送到端部,经煤斗将煤落到输煤栈桥煤斗中,由皮带机输送到岸上煤场。
该机的特点为:效率高、工作平稳、维护工作量小、清仓量小、有利于环境保护、动作简单、易于操作等。
卸船机说明书

目录◆封面 (1)◆目录 (2)◆产品概述 (3)◆设计标准及环境参数 (4)◆门座起重机技术特性 (4)◆起升机构 (5)◆变幅机构 (7)◆旋转机构 (8)◆行走机构 (9)◆金属结构 (11)◆锚定和防风固定装置 (13)◆电气部分 (13)◆操作 (23)◆安全注意事项 (25)◆维护和保养 (26)◆润滑 (31)第二章设计使用标准和环境参数一.设计使用标准:本机严格按照如下国际通用标准和规范设计制造。
结构:《欧洲搬运工程协会》 FEM机构:《欧洲搬运工程协会》 FEM电气:《国际电工委员会》IEC涂装:《瑞典工业标准》 SIS计量单位:国际单位制 ISO(主要设备)《起重机设计规范》 GB3811-83《起重机械安全规程》 GB6067-85《起重机试验规范与规程》 GB5905-86《电气装置工程施工及验收规范》 GB232-85《港口门座起重机基本系数规范》 GB81-94《港口起重机风载荷规范》 GB90-94《港口门座起重机技术条件》 GB17495-98《港口门座起重机试验方法》 GB99-94《港口装卸机械司机室》 GB5020-86《美国焊接协会标准》 GB6067-85《美国齿轮制造协会》 AGMA《电能质量公用电网谐波》GB/T 14549-93二.设计环境参数工作状态下最大设计风速:20m/s非工作状态下最大设计风速:55m/s接。
门架支承着门机的旋转部分重量和所有外载荷,并通过与之相连的行走机构,将所有的外载荷传递给轨道。
门架上设有上、下通行的梯子平台。
二、上转柱上转柱由两片板梁结构组成,重量轻,受力好,迎风面积小。
其上面端部布置有起升滑轮组、平衡梁支座及大拉杆支座,中间布置有变幅机构、下端直接焊接在转盘平面上。
三、转盘与机器房转盘为Q235B钢板焊成工字形主梁的框架结构,前右侧伸出操作室支承梁,后部箱体为固定配重。
机器房的总体布置和结构便于维修和检查,机器房出绳口考虑防雨水渗漏。
船舶卸货机的操作技术说明
船舶卸货机的操作技术说明船舶卸货机是一种常见的物料搬运设备,尤其适用于船舶货物的卸载工作。
卸货机的操作技术熟练程度直接影响到卸载效率和货物安全,因此,了解船舶卸货机的操作技术是十分必要的。
一、卸货机的结构组成船舶卸货机主要由上部分、中部分和下部分三个部分组成。
上部分:由大臂、小臂、液压缸、固定钩、吊索、滑轮和电气控制箱组成,用于进行货物的吊装和运输。
中部分:由立柱、转轮、立轮和主轮组成,用于升降大、小臂。
下部分:由车身、脚轮和底架组成,用于卸货机的移动和支撑。
二、卸货机操作技术1.准备工作在开始操作卸货机前,必须进行一系列的准备工作,如检查卸货机的各项部件是否完好无损,是否需要润滑和维修,以及吊装工具和安全防护设备是否齐备等。
2.起吊货物在起吊货物前,必须确定吊装点的位置并进行标记。
在起吊过程中,应注意控制重心,确保货物平稳吊起。
吊起货物后,应及时调整卸货机的视线,确保视野清晰,避免发生安全事故。
3.运输货物运输货物时,必须掌握车速和方向的控制。
在经过道路拐角时,要慢慢转弯,注意车身与货物之间的安全距离,防止发生摩擦和碰撞。
4.放置货物放置货物时,要根据货物的种类和体积,选择合适的落点和放置方式,确保货物安全降落。
在放置过程中,应严格遵循安全操作规程,做到防滑、防摔和防碰撞。
5.卸货机安全操作在操作卸货机时,一定要注意安全。
在进行任何操作前,必须先停车并将车体固定住。
在操作过程中,应注意控制卸货机的运动速度,避免发生危险事故。
同时,还应注意切勿疲劳驾驶或操作,以免误操作或意外发生。
三、常见问题及处理方法1.卸货机无法升降如果卸货机无法升降,可能是由于液压油不足或液压泵出现故障所致。
此时,需要及时补充液压油或修复故障部件。
2.卸货机无法行驶如果卸货机无法行驶,可能是由于电路或电控器出现故障所致。
此时,需要检查电路或电控器的连接情况,并及时维修或更换不良部件。
3.卸货机限位开关失效如果卸货机的限位开关失效,可能会导致卸货机的装载能力下降或造成操作危险。
电厂450T卸船机使用说明书解读
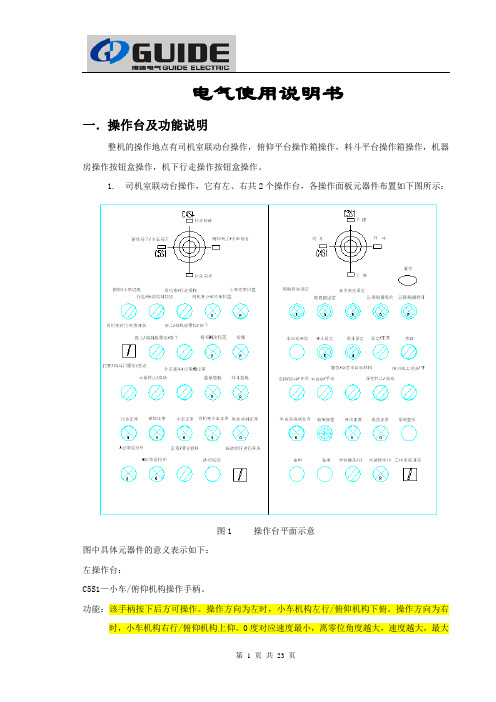
电气使用说明书一.操作台及功能说明整机的操作地点有司机室联动台操作,俯仰平台操作箱操作,料斗平台操作箱操作,机器房操作按钮盒操作,机下行走操作按钮盒操作。
1.司机室联动台操作,它有左、右共2个操作台,各操作面板元器件布置如下图所示:图1 操作台平面示意图中具体元器件的意义表示如下:左操作台:C5S1—小车/俯仰机构操作手柄。
功能:该手柄按下后方可操作。
操作方向为左时,小车机构左行/俯仰机构下俯。
操作方向为右时,小车机构右行/俯仰机构上仰。
0度对应速度最小,离零位角度越大,速度越大,最大C4S4—行走机构操作手柄。
功能:该手柄按下后方可操作。
操作方向为前时,行走机构前行。
操作方向为后时,行走机构后行。
0度对应速度最小,离零位角度越大,速度越大,最大运行频率为50HZ。
C5S5—试灯按钮。
功能:检测联动台的指示灯是否有效。
C8S1—俯仰机构与小车机构切换开关。
功能:当切换到俯仰位置时,俯仰机构准备好工作,当选择小车位置则小车机构准备好工作。
C9S7—行走机构与振动给料机构切换开关。
功能:当切换到行走位置时,行走机构准备好工作,当选择振动给料位置则振动给料机构准备好工作。
C10S1—司机室与现场操作切换开关。
功能:当切换到司机室位置(在正常作业)时,各机构的运行在司机室操作,当切换到现场操作位置(在检修)时,各机构分别在现场操作。
C10S2—司机室运行转换开关。
功能:当切换到[4司机室零位]时,司机室处于停止状态。
当切换到[3司机室左行1]时,司机室以1档的速度左行,当切换到[2司机室左行2]时,司机室以2档的速度左行,当切换到[1司机室左行3]时,司机室以3档的速度左行,当切换到[5司机室右行1]时,司机室以1档的速度右行,当切换到[6司机室右行2]时,司机室以2档的速度右行,当切换到[7司机室右行3]时,司机室以3档的速度右行。
C11S1—挡风板开关。
功能:当挡风板开关在[零位]时,挡风板处于停止状态。
GSU1500th桥式抓斗卸船机使用手册
1.序言 (4)2.概述 (4)2.1卸船机的构成及典型图 (4)2 .2 卸船机主要技术参数 (5)2.2.1额定能力 (5)2.2.2物料 (6)2.2.3速度 (6)2.2.4净空 (6)2.2.5小车和司机室行程 (6)2.2.6整机行走参数 (6)2.2.7供电方式 (7)2.2.8供水方式 (7)2.3卸船机的操作安全注意事项 (7)2.3.1一般事项 (7)2.3.2卸船机运转前的注意事项 (8)2.3.3卸船机作业后的注意事项 (8)3.机械装置说明 (9)3.1大车运行机构 (10)3.1.1构造及性能 (10)3.1.2维修和保养注意事项 (11)3.1.3解体和组装 (12)3.1.4注意事项(一般注意事项) (12)3.1.5重要注意事项 (13)3.2动力及控制电缆卷取装置 (14)3.2.1参阅图纸和资料 (14)3.3除尘系统 (14)3.3.1喷水压尘系统 (14)3.3.1.1喷水压尘系统的组成 (14)3.3.1.3 参阅图纸和资料 (14)3.4卸料漏斗系统 (14)3.4.1卸料漏斗系统的构成和性能 (14)3.4.2解体和组装 (15)3.4.3维护保养注意事项 (15)3.4.4参阅图纸和资料 (15)3.5斗门及驱动机构 (15)3.5.1组成与性能 (15)3.5.2维修保养注意事项 (16)3.5.3参阅图纸和资料 (16)3.6接料斗及机构 (16)3.6.1接料斗的构造及性能 (16)3.6.2维修保养事项 (16)3.6.3解体和组装 (16)3.6.4参阅的图纸和资料 (16)3.7卸料皮带机系统 (16)3.7.1卸料皮带机的构造及性能 (17)3.7.2维修保养注意事项 (17)3.8司机室总成 (18)3.8.1构造与性能 (18)3.8.2司机室运行说明 (18)383维修保养注意事项 (18)384参阅图纸 (19)3.9电缆悬挂装置 (19)3.9.1构造与性能 (19)3.9.2维修保养注意事项 (19)3.9.3参阅图纸 (20)司机室总成 (20)3.10 起升、开闭及小车牵引机构 (20)3.10.1构造和性能 (20)3.10.2维修保养注意事项 (21)3.10.3解体和组装 (22)3.10.4注意事项 (22)3.10.5参阅图纸和资料 (23)3.11臂架俯仰机构 (23)3.11.1构造和性能 (23)3.11.2维修保养注意事项 (24)3.11.3解体和组装 (25)3.11.4注意事项 (25)3.11.5参阅图纸和资料 (26)3.12 钢丝绳绕绳系统 (26)3.12.1起升、开闭钢丝绳及小车牵引(三合一)绕绳系统 (27)3.12.2托绳小车钢丝绳绕绳系统 (27)3.12.3臂架俯仰钢丝绳绕绳系统 (28)3.12.4维修保养注意事项 (28)3.12.5参阅图纸和资料 (28)3.13托绳辅助小车钢丝绳张紧系统 (28)3.13.1构造与工作原理 (28)3.13.2维修保养注意事项 (28)3.13.3参阅图纸及资料 (29)3.14主要钢丝绳的更换 (29)3.14.1起升钢丝绳、开闭钢丝绳 (29)3.14.2臂架俯仰钢丝绳 (29)3.14.3注意事项 (30)3.15维修起重机(室内、室外) (30)3.15.1室内维修起重机构造和性能 (30)3.15.2室外维修起重机构造和性能 (30)3.15.3维修保养注意事项 (30)3.15.4参阅图纸和资料 (31)3.16主小车装配 (31)3.16.1组成和性能 (31)3.16.2解体和组装 (31)3.16.3维修保养注意事项 (32)3.16.4参阅图纸和资料 (32)3.17托绳小车装配 (32)3.17.2解体和组装 (33)3.17.3维修保养注意事项 (33)3.17.4参阅图纸和资料 (34)3.18安全钩 (34)3.18.1构造和性能 (34)3.18.2维修保养注意事项 (34)3.18.3参阅图纸和资料 (35)3.19抓斗 (35)3.20梯子、平台、步道及电梯 (35)3.20.1梯子、平台、步道 (35)3.20.2电梯 (35)3.20.3注意事项 (35)3.20.4参阅图纸及资料 (35)3.21钢结构 (35)3.21.1紧固螺栓连接的防松检查 (36)3.21.2铰轴联接的润滑 (36)3.22卸船机的维修保养 (36)3.22.1操作方面 (36)3.22.2管理方面 (36)3.23保养和检查 (37)3.23.1保养和修理注意事项 (38)3.24卸船机主要部件的磨损 (42)3.24.1机构部分 (42)3.24.2轨道 (43)附表一电动机规格表 (43)附表二减速箱规格表 (44)附表三制动器规格表 (45)1.序言由中国华电工程(集团)公司为燃煤电厂设计、制造的1500t/h电差动桥式抓斗卸船机,具有先进的操作和保护系统,作为码头前沿的重大设备,卸船机的所有操作人员和管理人员必须熟悉有关规程及其说明。
卸船机操作手册
防城港卸船机1500T/H GSU 司机操作手册Contents Page 1. 操作站 (6)1.1.操作站的选择 (6)1.2.司机室操作站 (7)1.2.1.左联动(+CAO.11) (7)1.2.2.右联动(+CAO.12) (8)1.3. 机房操作站(+MHO.1) (9)1.4. 俯仰操作站(+BCA.1) (10)1.5. 大车操作站(+LSA.1) (10)1.6. 副司机操作站(+CPA.1) (11)1.7. 电气房操作(+EHS.13) (12)2. 起升操作 (12)2.1. 司机室操作 (12)2.1.1.起升下降 (12)2.1.2.起升上升 (12)2.1.3.负载平衡按钮 (13)2.1.4抓斗的开/闭 (13)2.1.5.负载优化 (13)2.1.6.抓斗限位调整(设定) (13)2.2.本地控制 (14)2.2.1.本地/远程切换操作 (14)2.2.2.起升的上升/下降操作 (14)2.2.3.闭合的上升/下降操作 (14)3.小车操作 (15)3.1.司机室操作 (15)3.1.1.小车的操作 (15)3.2.本地控制 (15)3.2.1. 本地/远程切换操作 (15)3.2.2.小车海侧/路侧操作................................ . (15)4.俯仰操作 (16)4.1.司机室操作 (16)4.1.1. 俯仰放下操作 (16)4.1.2. 俯仰放下指示灯状态 (16)4.1.3. 俯仰上升操作 (16)4.1.4. .俯仰上升指示灯状态 (16)4.1.5. 俯仰停止操作 (16)4.2.1. 本地/远程切换操作 (17)4.2.2. 控制按钮/指示灯 (17)4.2.3. 挂钩抬起指示灯状态 (17)4.2.4. 挂钩放下指示灯状态 (17)4.2.5. 俯仰手动/自动操作 (17)4.3.本地控制 (18)4.3.1. 本地/远程切换操作 (18)4.3.2. 俯仰上升/下降操作 (18)4.3.3. 俯仰上升/下降选择开关和停止按钮操作 (18)5.正常操作 (19)5.1司机室操作 (19)5.1.1司机室监控器 (19)5.1.2.卸船机的正常启动 (19)5.1.2.1.主令手柄 (19)5.1.2.2.终点限位 (19)5.1.2.3.脚踏开关 (19)5.1.3. PLC断电后的再启动 (19)5.1.3.1.小车控制主令手柄 (19)5.1.3.2. 起升控制主令手柄 (20)5.1.3.3.操作方式的选择 (20)5.1.4.报警的确认 (20)5.1.5.灯测试功能 (20)5.1.6. 投光灯 (21)5.1.7. 刮雨器 (21)5.1.8.司机室行走 (21)5.1.9.司机室停靠位置 (21)6.大车操作 (22)6.1. 司机室操作 (22)6.1.1.大车主令手柄 (22)6.1.2.制动器释放限位开关 (22)6.1.3. 大车锚定 (22)6.1.4. 大车夹轮器 (22)6.2.大车就地控制 (22)6.2.1.大车就地操作 (22)6.2.2.制动器释放限位开关 (23)6.2.3. 大车锚定 (23)6.2.4. 大车方向操作开关 (23)6.2.6. 大车夹轮器及其指示灯 (23)6.3.电缆卷筒 (23)7.物料处理系统 (24)7.1.料斗振动器 (24)7.1.1. 司机室操作 (24)7.1.2. 料斗操作站操作 (24)7.2.振动给料器 (24)7.2.1. 司机室操作 (24)7.2.2. 料斗操作站操作 (24)7.4.接料板 (25)7.4.1. 司机室操作 (25)7.4.2. 料斗操作站操作 (25)7.5.除尘系统 (25)7.5.1. 司机室操作 (25)7.5.2. 料斗操作站操作 (25)8.半自动功能 (26)8.1. 半自动工况的准备 (26)8.2. 半自动运行 (27)8.3. 半自动运行船型再设定和确认 (27)1. 操作站1.1.操作站的选择∙ +CAO.11,12 司机室操作站 (联动台)∙ +CPA.1 副司机室操作站∙ +LSA.1 大车操作站∙ +MHO.1 机房操作站∙ +BCA.1 俯仰操作站∙ +EHS.13 电气房操作站司机室操作站: 当在司机室按下“开机”按钮时, 卸船机进入可操作状态, 按下“关机”按钮时, 卸船机进入停止状态.电气房/机房/俯仰/大车/副司机操作站: 当在司机室按下“开机”按钮时, 卸船机进入可操作状态, 按下“关机”按钮时, 卸船机进入停止状态.所有操作站上都配有带自锁的紧停按钮, 当按下此按钮时, 将切断所有的控制和动力电源. 起升,开闭,俯仰及大车的终点极限开关动作时,可通过电气房的“极限旁路”开关,使相应的机构向极限的反方向。
600t桥式抓斗卸船机维护使用手册
600t/h 桥式抓斗卸船机维护使用手册目录1 序言 (5)2 概述 (5)2.1 卸船机的构成及典型图 _____________________________________________________ 62.1.1 卸船机主要组成的机械部件 (6)2.1.2 技术图纸 (6)2.2 卸船机主要技术参数 _______________________________________________________ 6 2.2.1 额定能力 ________________________________________________________________ 62.2.2 物料 (7)2.2.3 速度 (7)2.2.4 净空 (7)2.2.5 行程: (7)2.2.6 整机行走参数: (7)2.2.8 供电方式 (8)2.2.9 供水方式: (8)2.3 卸船机的操作安全注意事项 _________________________________________________ 82.3.1 一般事项 (8)2.3.2 卸船机运转前的正常检查 (9)2.3.3 卸船机作业后的注意事项 (9)2.3.4 基础 (10)3 机械装置说明 (10)3.1 大车运行机构 (12)3.1.1 构造及性能 (12)3.1.2 维修和保养注意事项 (13)3.1.3 解体和组装 (13)3.1.4 注意事项 (14)3.1.5 重要注意事项 (15)3.2 电缆卷筒装置___________________________________________________________ 153.2.1 组成 (15)3.2.2 解体和组装 (16)3.2.3 注意事项 (16)3.2.4 参阅图纸资料 (16)3.3 喷水压尘系统___________________________________________________________ 163.3.2 注意事项 (17)3.3.3 参阅的图纸和资料 (17)3. 6漏斗系统 __________________________________________________________________ 183. 6 .1漏斗系统的构成和性能 (18)3. 6.2 维护保养注意事项 (18)3. 6 .3 阅图纸和资料 (19)3. 7漏斗后部防风板装置。
600t 桥式抓斗卸船机维护使用手册

600t/h桥式抓斗卸船机维护使用手册目录1序言 (5)2概述 (5)2。
1 卸船机的构成及典型图______________________________________________ 62.1.1 卸船机主要组成的机械部件 (6)2。
1。
2 技术图纸 (6)2.2 卸船机主要技术参数_________________________________________________ 6 2.2。
1 额定能力________________________________________________________ 62。
2。
2 物料 (7)2.2.3 速度 (7)2。
2.4 净空 (7)2。
2。
5 行程: (7)2。
2。
6 整机行走参数: (7)2.2.8 供电方式 (8)2.2.9 供水方式: (8)2.3 卸船机的操作安全注意事项___________________________________________ 82。
3。
1 一般事项 (8)2。
3。
2 卸船机运转前的正常检查 (9)2。
3.3 卸船机作业后的注意事项 (9)2。
3。
4 基础 (10)3机械装置说明 (10)3。
1 大车运行机构 (12)3.1.1 构造及性能 (12)3.1。
2 维修和保养注意事项 (13)3。
1。
3 解体和组装 (13)3。
1。
4 注意事项 (14)3.1。
5 重要注意事项 (15)3.2 电缆卷筒装置______________________________________________________ 153.2.1 组成 (15)3.2.2 解体和组装 (16)3.2。
3 注意事项 (16)3.2。
4 参阅图纸资料 (16)3。
3 喷水压尘系统_____________________________________________________ 163.3。
2 注意事项 (17)3。
卸船机说明书
LS螺旋输送卸船机使用说明书中国福建福建省福州市晋安区双坂五金厂福建省福州市闽侯祥谦华兴机械厂销售电话:张华春传真号码:5概述LS型螺旋输送机LS技术特性:广泛使用在建材中转码头,电力、化工、食品等行业,适用于水平、垂直或任何角度,输送粉状、粒状和小块物料,如水泥、煤灰、矿粉、化肥、谷类等;其工作环境温度为-20-+40℃,输送物料温度为-20-+80℃,不宜输送易变质的、粘性大的、易结块的物料。
我司该产品码头螺旋中转设备,外观结构简单、易操作。
回转支承部分采用电动旋转盘,可360度旋转。
支架高度可根据客户要求设计,适合任何吨数散料运输船只。
垂直螺旋底部采用我司专利设计吸头,具有上料速度快,清仓干净的特点。
螺旋管头尾部轴承移至壳体外,并加大轴承型号,可赖受20倍正常使用时冲击力。
轴承座与管体连接部位采用德国堵漏技术,杜绝工作作业时因漏灰所带来的浪费与环境污染。
中间吊轴承采用合金结构,阻力小、耐磨性好、整机噪声低、适应性强、操作维修方便。
横管尾部活结采用两边夹举式滑套连接,管与地盘连接得到更好安全保障。
工作原理与结构工作原理:螺旋卸船机是一种高功效连续型散货卸船机械。
在螺旋卸船机垂直螺旋管内,物料在螺旋管壁和螺旋面上的摩擦力作用下,产生相对螺旋叶片滑的动,物料具有垂直运动分量而得以输送。
注:出料设备由客户自备产品介绍华兴生产的螺旋卸船机大至分为单头进料式和强迫进料式两种。
强迫进料式采用了喂料机构,强迫进料,特别对流动性较差的物料提升速度快,因卸料能力大,故产生很高的效率。
节能:高效低能耗螺旋卸船装置,采用了先进的支撑技术,结构简单,能耗低,可连续工作,平均耗电是气力抽吸卸船机的20%,效率却是气力抽吸卸船机的2倍。
单头进料结构简单,流动性好的物料满仓作业时每小时可达到130M3/h—160 M3/h左右。
因竖管吸头采用内部拨片进料,外部无旋转装置,清舱作业时大大提高了舱底工作人员安全保障。
且结构简单,无需对保养维修等繁琐的工作而烦恼。
卸船机安全作业指导书

卸船机安全作业指导书1 目的为规范卸船机操作程序,指导卸船机司机安全作业,确保安全生产,提高工作效率,结合公司设备和生产实际情况,特制定本作业指导书。
2 适用范围本作业指导书适用于*************公司内的所有有关卸船机的操作。
3 岗位职责3.1在班长的领导下,对所辖机组的安全经济运行负主要责任。
3.2 对因本人原因造成的人身或设备的不安全事件及经济损失负主要责任。
3.3 在上班前到达指定地点进行站班,接受班长布置运行方式、生产任务、安全注意事项,然后进行对口交接班。
3.4 详细阅读各项记录,然后按照规定步骤对作业条件、环境、设备等进行全面检查,做好详细检查记录。
3.5 负责本岗位及所辖设备的维护、操作、巡查工作。
3.6 发现设备缺陷和不正常现象时,应立即汇报班长并做好缺陷记录工作。
3.7 遇有重大缺陷和隐患应立即采取措施,防止扩大造成损失。
3.8 当检修人员前来检查处理缺陷时,应做好安全措施并积极配合。
3.9 消缺结束后应认真验收,并在《维修工作单》上签署验收意见。
3.10对尚未消除的缺陷应加强监视,做好安全防范措施,并在交接班时主动向接班人员详细交待清楚。
3.11接到大风警报或遇有6级以上大风时,应按大型机械防风制度的有关规定立即做好大型机械的防风措施,防止发生事故。
3.12根据燃煤的湿度情况,随时打开机上水喷洒,抑制粉尘飞扬。
3.13设备停止运行后,应做好所辖范围内的检查和清洁卫生工作。
3.14认真填写交班簿,详细记录当班设备运行情况、运行时间、设备缺陷的名称与位置、检修、维护项目、检修设备的验收意见以及运行中的不正常现象和应注意的其它事项,填写时做到清楚、准确。
3.15办完交接班手续后,在指定地点参加班后会。
3.16积极参加公司或班组组织的各类会议、培训及安全活动。
3.17完成上级领导交办的其它工作。
4 设备技术参数5 操作规程5.1作业前5.1.1参加班组安全会,明确当班的生产、维护等工作任务,明确当班安全注意事项。
卸船机技术操作规程(试行版)

卸船机技术操作规程1.开机准备1.1全部手柄回零。
1.2全部紧急开关复位。
1.3按下联动台上控制合按钮。
灯不亮:控制系统没有合闸。
闪烁:“开机”状态,其它操作站被选择。
常亮:“开机”状态,本操作站被选择。
2. 抓斗运动操作2.1操作模式选择通过司机室联动台上的选择开关,有以下五种操作模式可供选择:单动起升模式:起升电机单动模式。
单动开闭模式:开闭电机单动模式(抓斗初始化需要)。
起升+开闭模式:起升和开闭电机联动模式。
抓斗模式:正常抓料手动模式和半自动作业模式。
推耙机模式:起吊清仓机的专用模式。
2.2抓斗初始化每次PLC上电或起升编码器故障后,“闭斗初始化”和“开斗初始化”指示灯闪烁,抓斗必须重新进行处始化。
初始化操作流程:选择起升+开闭模式→将抓斗上升到上停止位置,完成起始初始化→选择开闭单动模式→闭合抓斗→按”闭斗初始化”按钮;”闭斗初始化”指示灯常亮,闭斗初始化完成→打开抓斗→按“开斗初始化”按钮,“开斗初始化”指示灯常亮,开斗初始化完成→抓斗初始化完成,可以进行抓斗模式作业。
A.起升初始化将“操作模式选择”转换开关转到“起升+开闭”位置,接着将抓斗上升到正常上停止位置(起升凸轮限位开关动作),起升初始化完成。
B.开闭初始化抓斗在向上停止位置,或将抓斗低速运行到空中适当位置后,将“操作模式选择”转换开关转到“单动开闭”位置,将抓斗闭合,按一下“闭斗初始化”带灯指示按钮,完成抓斗闭合初始化,指示灯不再闪烁,为常亮。
然后将抓斗打开,在操作人员认为适合的最大打开位置,按一下“开斗初始化”带灯指示按钮,完成抓斗开斗初始化,指示灯不再闪烁,为常亮。
C.小车初始化将小车低速开到陆侧停止限位,小车初始化工作完成。
上述初始化工作完成后,将“操作模式选择”转换开关转到“抓斗”位置,即可开始正常卸煤。
2.3抓斗升降操作操作人员只要将“起升/开闭”主令开关打在“起升”或“下降”位置,起升、开闭电机就会同时上升或下降方向运行。
卸船机安全作业指导书

卸船机安全作业指导书1. 引言卸船机是一种用于装卸货物的重型机械设备,广泛应用于港口、码头等场所。
由于卸船机的作业涉及到高度、重量和复杂的机械操作,所以必须严格遵守安全作业规范,以确保人员和设备的安全。
本文档将介绍卸船机安全作业的一些基本原则和操作规范,以帮助相关人员正确、安全地使用卸船机。
2. 卸船机安全操作原则卸船机的安全操作原则包括以下几个方面:•操作人员必须持有相关证书并经过培训,了解并熟悉卸船机的操作原理和安全事项。
•在操作卸船机前必须进行设备的检查和维护,确保设备处于良好的工作状态。
•操作人员必须穿戴个人防护装备,包括头盔、安全鞋、安全带等,确保自身的安全。
•在操作卸船机时必须注意周围的环境,避免与其他设备或人员发生碰撞或伤害。
•在操作卸船机时必须遵循设备的使用说明书,确保正确操作并避免误操作。
•在操作卸船机时必须保持警惕和集中注意力,防止疲劳或分心导致意外发生。
•在操作卸船机时必须遵守相关法律法规,严禁酒后操作或违反安全规定的行为。
3. 卸船机安全作业流程卸船机的安全作业流程可以按照以下步骤进行:3.1 准备工作•操作人员必须穿戴防护装备,并且确保装备完好无损。
•检查卸船机的机械、液压、电气等部件是否正常工作,如有异常应及时报修。
•清理卸船机周围的障碍物,确保操作区域宽敞、平整。
•检查工作区域是否有易燃易爆等危险物品,必要时采取相应的防护措施。
3.2 操作步骤1.启动卸船机前,确认设备周围没有人员或障碍物。
2.按照操作面板上的指示操作启动卸船机,确保设备运行稳定。
3.根据工作需要调整卸船机的高度、角度和速度,并注意设备的负载限制。
4.卸船机运行期间,操作人员必须保持警惕,观察载货线的状况,确保货物悬挂牢固。
5.卸船机工作结束后,必须将设备停稳,关闭电源,并进行设备的清洁和维护。
4. 卸船机安全应急措施在卸船机作业过程中,可能会发生各种意外情况,为了能够及时应对和处理,必须事先制定相应的应急措施。
高效螺旋卸船设备使用说明书

卸船装车设备的操作规程一、垂直管式螺旋取料机垂直管式螺旋取料机开机前要检查好电机的接线和转向是否正确。
传动皮带是否调整好,水管式螺旋输送机联接并安装到回转支承上,空载起动旋转正常后才能负荷使用;取料使用时要均匀,不能突然快速从上往下取料,取料头不允许有杂物进入,如果有杂物进入则立即停机清理,以避免垂直管式螺旋取料机卡死、电机烧坏、螺旋体断裂的现象发生。
二、水平管式螺旋输送机水平管式螺旋输送机开机前要检查好传动电机的接线和转向是否正确传动,把设备安装到回转塔架好并空载试机正常后才能带料使用;水平管式螺旋输送机不能允许带料起动和过载使用,以免冲力、扭力过大而使中间轴承和螺旋体扭断。
三、回转塔架回转塔架开机前要按安装事项检查好设备,如地脚基础有否松动,上部转盘与机座的联接是否牢固,卷扬机的电机、电磁制动机构接线方向正确否,配重块安装正确、牢固性,还有钢丝绳各夹头、滑轮紧固性,以及垂直管式螺旋取料机与水平管式螺旋输送机的旋转支承、水平管式螺旋输送机与回转塔架联接的回转支承紧固性等等,上述工作检查好后才能空机试机;如卷扬机上下运动、制动刹车、垂直管式螺旋取料机和水平管式螺旋输送机空机转动,还有回转塔架来回转动作反复多次没有异常情况后才能带料使用。
四、水平管式卸料机水平管式卸料机开机前要检查好驱动电机的接线和转向是否正常,把设备安装到回转塔架好并空载试机正常后才能带料使用;水平管式卸料机不能允许带料起动和过载使用,以免冲力、扭力过大而使中间轴承和螺旋体扭断。
卸料头升高后散装车才能开进装车位置装车,卸料头与散装车装车口要对正,以便物料飞溢出来,装车即将满后要关停所以得设备并把卸料头升高后才能开车,以便卸料头与散装车碰撞。
整个卸船、装车设备包括:垂直管式螺旋取料机、水平管式螺旋输送机、回转塔架和水平管式卸料机。
五、开机顺序在散装车开到对准水平管式卸料机的卸料头的前提下:1)把垂直管式螺旋取料机升高超过船边,旋转到要卸料位置。
差动式卸船机说明
广东大唐潮州三右门电厂一期工程(4X600MW) 1500t/h桥式抓斗卸船机投标文件四卷筒差动绳索牵引式卸船机简介本次投标中,在使用、设计、安装、调试、运输、售后服务等条件完全相同条件下,ZPMC极力推荐四卷筒差动绳索牵引式卸船机,该机型为目前世界上广为推荐的好机型,国内有诸多港口、电厂码头均使用该机型,如扬州二电厂使用的2台1400t/h卸船机就是釆用这种传动的机型。
最近宁波港北仑股份有限公司增加卸船机时,指定要这种型式,他们是十分慎重选择机型的单位,是经过相当长时间调研作的决定「我们曾为青岛港、上海罗泾港、巴西、大连港、日照港、广东台山电厂、宁波大榭电厂等多家港口提供该机型卸船机。
与主辅小车式卸船机相比,该机型具有缠绕钢丝用量少,滑轮数少,日常工作维护量小,便于更换钢丝绳等优点。
该卸船机功能阐述如下:Q 上海振华港机(集团)股份有限公司是以出口为主的岸桥、卸船机生产厂商,每年有儿十台产品运送至世界各地,卸船机出口至印尼、巴西、美国。
我们为买方提供2台绳索牵引式桥式抓斗卸船机的设计制造安装完全按照国际标准。
按出口至美国、欧洲等发达国家的要求提供给用户疔亥设备使用地点为广东国华台山发电厂。
(参考图纸见ULOOA)Q 卸船机为四卷筒差动绳索牵引桥式抓斗卸船机,沿码头上全长(280m)轨道做工作或非工作性运行可对用户码头靠岸35QOODWT〜100Q00DWT散货海轮进行卸船作业。
Q 卸船机曲抓斗抓取物料卸至漏斗,经振动给料器、移动式带式输送机、悬挂式给料盘等将物料卸至地面皮带机(CIA, C.B, Gc)o卸船机设计额定起重量约为36.5吨,设计额定卸载煤炭能力是1500t/h,最大能力大于1800C41,平均生产能力大于800t/ho广东大唐潮州三百门电厂一期工程(4X600MW) 1500t/h桥式抓斗卸船机投标文件Q本设备动力电源由地面接线箱提供,供电电源为6kv, 3相,50Hz,经接线箱、卸船机的电缆卷筒送至主开尖柜,分别输出给主变压器和辅助变压器,然后进入设在机房内的主驱动和辅助开尖柜。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录◆封面 (1)◆目录 (2)◆产品概述 (3)◆设计标准及环境参数 (4)◆门座起重机技术特性 (4)◆起升机构 (5)◆变幅机构 (7)◆旋转机构 (8)◆行走机构 (9)◆金属结构 (11)◆锚定和防风固定装置 (13)◆电气部分 (13)◆操作 (23)◆安全注意事项 (25)◆维护和保养 (26)◆润滑 (31)第二章设计使用标准和环境参数一.设计使用标准:本机严格按照如下国际通用标准和规范设计制造。
结构:《欧洲搬运工程协会》 FEM机构:《欧洲搬运工程协会》 FEM电气:《国际电工委员会》IEC涂装:《瑞典工业标准》 SIS计量单位:国际单位制 ISO(主要设备)《起重机设计规范》 GB3811-83《起重机械安全规程》 GB6067-85《起重机试验规范与规程》 GB5905-86《电气装置工程施工及验收规范》 GB232-85《港口门座起重机基本系数规范》 GB81-94《港口起重机风载荷规范》 GB90-94《港口门座起重机技术条件》 GB17495-98《港口门座起重机试验方法》 GB99-94《港口装卸机械司机室》 GB5020-86《美国焊接协会标准》 GB6067-85《美国齿轮制造协会》 AGMA《电能质量公用电网谐波》GB/T 14549-93二.设计环境参数工作状态下最大设计风速:20m/s非工作状态下最大设计风速:55m/s接。
门架支承着门机的旋转部分重量和所有外载荷,并通过与之相连的行走机构,将所有的外载荷传递给轨道。
门架上设有上、下通行的梯子平台。
二、上转柱上转柱由两片板梁结构组成,重量轻,受力好,迎风面积小。
其上面端部布置有起升滑轮组、平衡梁支座及大拉杆支座,中间布置有变幅机构、下端直接焊接在转盘平面上。
三、转盘与机器房转盘为Q235B钢板焊成工字形主梁的框架结构,前右侧伸出操作室支承梁,后部箱体为固定配重。
机器房的总体布置和结构便于维修和检查,机器房出绳口考虑防雨水渗漏。
机房设有钳工台、工具柜,机器房内的各组件均可由天窗或机房尾部的门吊进吊出,机房内设有可吊最重组件的手动葫芦和电动葫芦。
电控室的四壁和天花板镶有隔音和隔热材料,材料具有防火性能。
室内装有冷热兼用型分体式空调设备。
四、司机室司机室按人机工程学原理进行设计,使在起重机上作业的人员有舒适的环境,司机室固定在转盘上。
司机室内设可调式司机座椅,联动操作控制台、操作踏板,照明开关柜和仪表箱等。
操作室由方钢管骨架组成,四壁用装饰板和铝合金嵌条镶牢,中间有泡沫塑料隔热层。
操作室为全封闭式,有分体式冷暖空调机。
五、臂架系统起重臂系统是普通四连杆结构,并有平衡系统,以使货物和臂架及平衡系统的重心在变幅过程中作水平移动的特性。
起重臂、象鼻梁、拉杆均为铰接联接。
各铰点均装有滚动轴承。
臂架系统中设有梯子平台,通往臂架的各铰点处和滑轮位置便于检查和维修工作,平时要经常检查结构件的铰点处焊缝和母材状况,发现有开焊、开裂或局部失稳的情况时采取相应措施。
六、平台、走道和梯子平台、走道和梯子的布置便于携带工具和其它设备的工作人员到达所有需要进行检查、维修和更按零部件的地方,并具有足够的操作空间。
第九章电气部分一、供电电源码头三相四线制AC10KV 50HZ高压电源经过一只高压电缆卷筒, 分别依次送入高压柜、高压变压器、总开关柜内,变压器低压侧输出AC400V后经过行走控制柜旁的换向刀闸开关P1HXK(使用刀闸可改变供电电源相序),经中心受电器送入电源柜内,接入总空气开关,在空气开关的上桩头,接入三相电源,在通过不同的空气开关分别控制风机、维修电源箱、照明、二次控制电源。
由主空气开关P3ZK及主接触器P3ZXC1、P3ZXC2等分成三段保护,照明供电及二次控制属动力开关超前接法,照明及动力控制严格分开,各机构都设有独立的一次空气开关和二次控制开关,PLC中CPU、输入模块和输出模块都设有各自独立的控制开关。
二、工作原理2.1 起升机构工作原理起升机构由两台YZP2355M2-8,200KW电机通过两台西门子变频器6SE7036-0EK60-Z=G97+K11+K02+A00进行起、制动运行,同时配备了两台风机以保证变频电机的散热,使运行平稳可靠。
起升机构通过类型开关C8LU1实现钩斗的转换,通过C8LU3可实现单双机运行,双机状态时,通过配合脚踏开关C6KBD,可实现单机开、闭抓斗和双机起升。
PLC控制原理:S手柄在零位,相序正常,起升无故障,风速仪风速(风速达到16m/s时间断音响报警;风速达到20m/s时长音报警,2-3分钟后输出继电器触点断电信号)在正常范围内,超负荷(90%额定起重量时有视觉报警,110%额定起重量时,灯光显示和声音报警,输出继电器触点延时断电信号)正常,不作行走运行,起升无故障时,机构允许升降。
若超负荷超出正常的范围,则只允许下降不允许上升。
若在正常上升范围内,不超负荷,上升操作允许;在正常下降范围内,下降操作允许。
另外,起升机构还装有起安全保护作用的多功能限位,限位能够实现正常升降位置前的减速、自动停止和极限位置时的紧急停止。
如果遇到紧急情况,司机可立即拍下联动台上的紧急停止按钮,此时整个供电电源断开(照明除外),所有常闭式制动器全部立即抱闸,须待故障排除后恢复工作。
2.2 变幅机构工作原理变幅机构由一台YZP2280S-8,45KW电机通过一台西门子变频器6SE7031-5EF60-Z=G97+K11+K02+A00进行起、制动运行。
同时为了使变幅过程安全可靠,变幅电机除了由液压制动器保证变幅电机的可靠启动与停机外,又配备了一台风机以保证变频电机的散热。
PLC控制原理:主令控制器LSA置零位,相序正常,风速正常,变幅无故障,不作行走运行。
增幅1-3档时,不超负荷,限位正常,增幅操作允许,增幅指令依次输入到PLC,由PLC程序控制电机的运行,不论增幅(或减幅)、变幅制动器都打开,当手柄由二档回零时,制动器延时抱闸,变幅机构到达最大(最小)幅度前会自动减速并最终停止。
变幅机构的限位能够实现最大最小幅度前的自动减速、自动停止。
当达到最大、最小幅度后,司机室联动台上的蜂呜器开始报警,变幅机构只允许反向操作。
另外还在臂架的下铰点处装有最大最小幅度的紧急停止限位开关,以保证变幅达到极限幅度时能准确停车。
如果遇到紧急情况,司机可立即拍下联动台上的紧急停止按钮,此时整个供电电源断开(照明除外),所有常闭式制动器全部立即抱闸,须待故障排除后恢复工作。
2.3 回转机构工作原理回转机构由两台YZP2250M-8,37KW电机通过两台西门子变频器6SE7031-2EF60-Z=G97+K11+K02+A00进行起、制动运行。
同时各自配备了两台风机以保证电机的散热。
为了实现回转准确停车,机构设有脚踏液压制动。
PLC控制原理:回转主令SSA置零位,风速仪正常,相序正常,回转无故障,回转手刹、锚定打开,零位合上且自锁,主令置左旋1-3档,回转脚踏处于正常位置,左旋允许。
主令置右旋1-3档,回转脚踏处于正常位置,右旋允许。
2.4 行走机构工作原理行走机构由八台KA97TDV160M4,11KW电机通过与起升机构中的支持变频器共用切换进行起、制动运行,同时相应配备制动器八台。
此时转换开关C8LU2应在“机上行走”位置或者“机下行走”位置。
当转换开关C8LU2在“机上行走”位置时,由联动台上的主令控制行走机构的多速运行或停止;当转换开关C8LU2在“机下行走”位置时,由地面行走操作按钮控制行走机构的低速运行或停止,此种情况一般应用在进行锚定作业时用于准确对位。
PLC控制原理:行走主令置零位,行走无故障,工作机构停止运行,电缆在正常行程范围内,风速仪正常,相序正常,电动防爬打开,锚定提起,行走零位置1且自锁,不论左行、右行,联动台手柄操作后,行走接触器才能得电,左行(或右行)时,制动器得电打开,停止运行时,制动器延时抱闸,电缆卷筒电机在行走运行停止后1秒方可断电。
只要有行走运行信号,在行走机构运行时,声光报警器开始报警;停止运行后,声光报警器延时断电。
第十章操作一、操作前的准备工作1、上机前,撤除锚定装置。
2、接通电缆插座电源(电站开始向起重机供电)。
3、检查行车轨道,去除轨道上的障碍物。
提走防爬楔、锚定装置等。
4、检查旋转锚定,将插板抽出。
5、正常后,合上行走柜总空气开关。
6、合上电源柜总电源开关。
电压表应指示正常。
7、确认联动台上的手柄均处于零位。
8、检查各种限位及保护装置确认均处于完好正常工作状态。
9、依次合上各机构控制柜内的主回路电源开关及控制回路、辅助回路的自动开关。
10、各指示灯应正常。
11、旋松回转制动器的手轮,松开回转制动器,制动器闸瓦与制动轮的间隙应在2mm以内,不能太大。
12、各机构空载慢速往返动作二次,一切正常后,方可工作。
二、各机构操作各机构的操作均在联动台上进行。
1、起升机构起升机构的起升手柄向后拉为起升动作,前推为下降动作。
上升、下降均有明显的档次以控制速度,平稳启动以及停车。
2、变幅机构变幅手柄向前推为增幅,后拉为减幅,前后均为三档。
3、旋转机构旋转手柄,向左为左转,向右为右转,各为三档。
4、行走机构行走手柄,其方向与吊臂所处方向有关。
速度前后均三档。
三、操作注意事项1、操作联动台的两手柄在每个板动方向上均有档位,以控制各机构动作的速度变化,同时在联动台上还装有喇叭按钮,单机选择开关和紧停按钮等,紧停按钮是遇有紧急情况时停车用,其余信号灯及按钮均有铭牌予以标识。
2、在司机的前方有两个脚踏板,左边为旋转点动脚踏开关,右边是单机脚踏。
3、遇有天气预报大风来临之前就需将起重机开至锚定坑的上方,将锚定装置锚入锚定坑。
4、经常检查锚定装置的工作可靠性。
四、操作结束后的安全检查1、操作手柄放到零位。
2、拉下主电源开关和控制电源开关,切断电源。
3、上紧回转制动器手轮。
4、将防爬楔均塞紧于相应的车轮与轨道之间。
5、如有必要系上防风系缆。
6、切断供电电缆电源。
如果司机需要暂停使用起重机,则只需按一下停止按钮,主接触器失电,切断各机构一次电源,此时司机不能离开起重机。
第十一章安全注意事项1、操作者应全面了解起重机的技术性能和构造,安全操作技术规程及信号规则后,方可操作。
2、行走前必须清除轨道及其附近的障碍物。
3、作业前查看起重机外表,确认起重机金属结构与连接部分无异常后方可操作。
4、检查起重机传动部分有无障碍物,并检查制动器及联轴节的紧固情况。
5、各传动及转动部分应该得到充分的润滑。
6、作业时,司机不得离开司机座,并禁止未经允许的人员上机。
7、起重机发生故障时,应立即停止作业。
8、货物重量不明,捆扎不妥,挂钩不正,夜间照明不足,均不得起吊。
9、严禁超载作业和斜拉货物。