第六章 间歇运动机构
机械设计基础.第六章_间歇运动机构
21 2 2
2
运动关系(运动特性系数τ ):
tm 21 z 2 t 2 2z
讨论:τ >0,z≥3
21 z 2 2 2z
(2)销数 K
在0~0.5 之间,运动时间小于 静止时间。
K ( z 2) 2z
讨论:τ <1 常用K=1
§6-1 棘轮机构
组成:棘轮机构主要由
棘轮2、驱动棘爪3、摇杆1、 止动爪5和机架等组成 。
工作原理: 原动件1逆时针摆动时,棘轮逆时针转动 原动机1顺时针摆动时,棘轮不动
类型1:运动形式来分
单动式棘轮机构(转动、移动) 齿式棘轮机构 双动式棘轮机构 可变向棘轮机构
棘条机构(移动) 钩头双动式棘轮机构
运动;
加工复杂;
刚性冲击,不适于高速。
应用于计数器、电影放映机和某些具 有特殊运动要求的专业机械中。
§ 6-4 凸轮式间歇机构(不讲)
图6-11 圆柱形凸轮间歇运动机构
此机构实质上为一个摆 杆长度为R2、只有推程 和远休止角的摆动从动 件圆柱凸轮机构。
蜗杆凸轮分度机构
凸轮如蜗杆,滚子如涡 轮的齿。
作业:
6-2、6-3
2z K z2
增加径向槽数z可以增加机构运动的平稳性,但是机构尺寸 随之增大,导致惯性力增大。一般取 z = 4~8。
几何尺寸计算,学会参考机械设计手册
§6-3. 不完全齿轮机构
不完全齿轮机构是由普通齿轮机构演化而成。如图 所示,主动轮1为只有一个齿或几个齿的不完全齿轮, 从动轮2由正常齿和带锁止弧的厚齿彼此相间组成。
(2)制动机构
在卷扬机中通过棘轮机构实现制动功能,防止
链条断裂时卷筒逆转。
第六章间歇运动机构与组合机构.

第六章间歇运动机构与组合机构在机械和仪表中,常常需要原动件作连续运动,而从动件则产生周期性时动时停的间歇运动,实现这种间歇运动的机构称为间歇运动机构。
间歇运动的机构很多,本章仅介绍最常见的几种。
连杆机构、凸轮机构、齿轮机构和间歇运动机构是工程中最常用的几种基本机构。
对于比较复杂的运动变换,某种基本机构单独使用往往难以满足实际生产过程的需要,因此,把若干种基本机构用一定的方式联接起来成为组合机构,以便得到单个基本机构所不能具有的运动性能。
在本章最后将介绍几种组合机构。
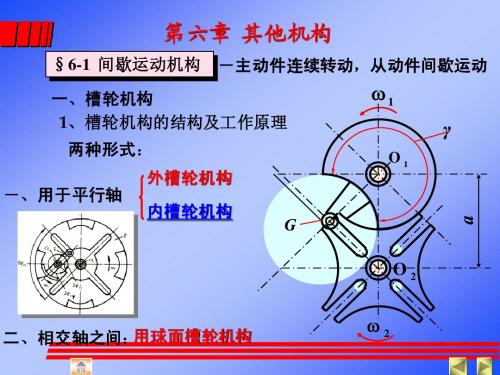
§6-1 槽轮机构一、槽轮机构的工作原理槽轮机构又称马尔他机构,它是由槽轮、装有圆销的拨盘和机架组成的步进运动机构。
如图6-1所示,它由带圆销A的主动拨盘1,具有径向槽的从动槽轮2和机架组成。
拨盘作匀速转动时,驱动槽轮作时转时停的单向间歇运动。
当拨盘上圆销A未进入槽轮径向槽时,由于槽轮的内凹锁止弧β被拨盘的外凸圆弧α卡住,故槽轮静止。
图示位置是圆销A刚开始进入槽轮径向槽时的情况,这时锁止弧刚被松开,因此槽轮受圆销A的驱动开始沿顺时针方向转动;当圆销A离开径向槽时,槽轮的下一个内凹锁止槽又被拨盘的外锁止槽卡住,致使槽轮静止,直到圆销A在进入槽轮另一径向槽时,两者又重复上述的运动循环。
槽轮机构有两种基本型式:一种是外啮合槽轮机构,如图6-1所示,另一种是内啮合槽轮机构,如图6-2所示。
图6-1 外啮合槽轮机构图6-2 内啮合槽轮机构槽轮机构结构简单,机械效率高,并且运动平稳,因此在自动机床转位机构、电影放映机卷片机构等自动机械中得到广泛的应用。
二、槽轮机构的主要参数槽轮机构的主要参数是槽数z 和拨盘圆销数K 。
如图6-1所示。
为了使槽轮2在开始和终止转动时的瞬时角速度为零,以避免圆销A 与槽轮发生撞击,圆销进入或脱出径向槽的瞬时,径向槽的中线应与圆销中心相切,即O 2A 应与O 1A 垂直。
设z 为均匀分布的径向槽数,当槽轮2转过2ϕ2=2π/z 弧度时,拨盘1相应转过的转角为: z ππϕπα22221-=-= (6-1) 在一个运动循环内,槽轮2的运动时间t '与主动拨盘转一周的总时间t 之比,称为槽轮机构的运动系数....。
第6章 间歇运动机构
外槽轮机构
内槽轮机构
6.2 槽轮机构
6.2.2 槽轮机构的主要参数
• 运动特性系数:在 运动特性系数: 特性系数 一个运动循环内, 一个运动循环内, 槽轮2的运动时间对 槽轮 的运动时间对 拨盘1的运动时间之 拨盘 的运动时间之 比值称为运动特性 系数。 系数。
6.2 槽轮机构
6.2.2 槽轮机构的主要参数
• 作业:6-1,6-2,6-3,6-8 作业: , , ,
第6章 间歇运动机构
• 假设槽轮机构中槽数为 销数为K 假设槽轮机构中槽数为Z,销数为 销数为 • 拨盘 一般为匀速转动,所以时间的 拨盘1一般为匀速转动 所以时间的 一般为匀速转动 比值可以用拨盘转角的比值表示. 比值可以用拨盘转角的比值表示 由图可知,与图对应的 与图对应的t 由图可知 与图对应的 m和t 所对应 的拨盘转角分别为2φ 的拨盘转角分别为 1和2π.
第6章 间歇运动机构
本章小结
• 4.凸轮式间歇运动机构是将主动件的连续转动转 . 化为从动件的间歇运动。 化为从动件的间歇运动。通过合理地设计凸轮廓 可以减少动载荷和避免冲击, 线,可以减少动载荷和避免冲击,适用于高速运 转的场合。凸轮式间歇运动机构结构紧凑、 转的场合。凸轮式间歇运动机构结构紧凑、转位 准确,但加工复杂,安装调试比较困难。 准确,但加工复杂,安装调试比较困难。
第6章 间歇运动机构
第6章 间歇运动机构
• 关键知识点 1.间歇运动机构功能分析; .间歇运动机构功能分析; 2.间歇运动机构的工作原理、运动特点和适 .间歇运动机构的工作原理、 用场合。 用场合。 • 难点 棘爪的工作条件分析。 棘爪的工作条件分析。
第6章 间歇运动机构
本章主要内容 • 6.1 棘轮机构 • 6.2 槽轮机构 • 6.3 不完全齿轮机构 • 6.4 凸轮间歇运动机构 • 总结
机械设计基础 第6章间歇运动机构

§6-4 凸轮式间歇运动机构
通常有两种型式: 2
1、圆柱凸轮间歇运动机构
1) 组成:凸轮1;滚子3均匀
分布在转盘2端面;滚子中心
R2
3
与转盘中心的距离等于R2。
2)原理:当凸轮转过δt时,
1
转盘以某种运动规律转过角
度δ2max=2π/z;当凸轮继
滚子数
续转过其余角度(2π-δt)时,转盘静止不动。当凸轮继续转动
轮1的锁住弧(外凸圆弧g)与轮2的边锁住弧(内凹圆弧f)配合,将
轮2锁住,使其停歇在预定位置,以保证主动轮1的首齿S下次再与 从动轮相应的轮齿啮合传动。
优点:结构简单、制造容易、工作可靠、从动轮运动时间和静止时间的比例可在较大范 围内变化。
缺点:从动轮在开始进入啮合与脱离啮合时有较大冲击,故用于低速、轻载场合。
故棘轮静止不动。
工作原理:原动件往复摆动,棘爪推动棘轮单向间歇转动。
三、双动式棘轮机构
双动棘轮机构1
双动棘轮机构2
改变原动件可以得到图示双动式棘轮机构。原动件来回摆动时, 使棘轮2沿同一向转动。驱动棘爪3可是直的或带钩的。
四、双向棘轮:棘轮轮齿制成方形时,成为可变向棘轮机构。
特点:图a棘爪1在B位置时,棘轮2将沿逆时针方向作间歇运动;当棘爪1翻转 到A位置时,棘轮2将沿顺时针方向作间歇运动。
规律设计凸轮( )。
4、从动件位移与凸轮转角之间的关系可用( )线图表示,该线
图取决于( )曲线的形状。
5、其他条件不变时,(
)越小,( )越大。
6、齿轮传动的基本要求之一是(
)必须保持不变。
7、一对外啮合齿轮的中心距恒等于其(
)半径之和,角速
比恒等于其( )半径的反比。
第6章间歇运动机构

6.1.2 棘轮和棘爪的正确位置及主要几何尺寸
1、棘轮和棘爪的正确位置
棘轮在工作时受到棘爪推力的作用,同时,棘爪也受到棘轮 反作用力的作用,由于棘爪可视为二力杆(图37),所以棘爪 对棘轮的推力作用线通过棘爪的轴心O2,直线O2A即为作用线。 在相同推力下,为了使棘轮获得最大的转矩,应使推力作用 线O2A垂直于O1A,即∠O2AO1=90°。
Z
21 Z 2 1 1 2 2Z 2 Z
讨论:1、τ=0,槽轮始终不动; τ>0,∴Z≥3 。 2、槽轮的运动时间总小于静止时间。 1 3、要使, 2 须在构件1上安装多个圆销。 设k为均匀分布的圆销数, k ( Z 2)
2Z
由 上式可知:当Z=3时,圆销的数目可为 1~5;当Z=4或5时,圆销的数目可为1~3;而当 Z≥6时,圆销的数目可为1~2。一般情况下 Z=4~8。
第6章 间歇运动机构
间歇运动机构:机器工作时,当主动件作连续运动时, 常需要从动件产生周期性的运动和停歇,实现这种运 动的机构,称间歇运动机构。 类型: 1.主动件往复摆动,从动件间歇运动---棘轮机构 2.主动件连续转动,从动件间歇运动---槽轮机构、 不完全齿轮机构 应用:自行车的飞轮机构、自动机床的进给机构、送 料机构、刀架的转位机构等
2.棘轮机构的类型 (齿式,摩擦式) (1)齿式棘轮机构(利用棘爪与棘轮上的棘齿啮合与分离实现间歇)
1)单动式棘轮机构
外啮合式棘轮机构 内啮合式棘轮机构
外啮合式棘轮机构
第6章 间歇运动机构
tm 21 π 2π / z z 2
t 2π
2π
2z
0 0.5 槽轮运动时间总小于静止时间。
若拨盘1上装有均匀分布的K个圆销,则槽轮在一个运动循环
中的运动时间为一个圆销时的K倍,因此可以得到 > 0.5:
K (z 2)
2z
由于 < 1,所以
槽轮机构结构简单,工作可靠,能准确控制转过的角度。但 槽轮的转角大小不能调节,而且在槽轮转动的始、末位置角 速度变化较大,所以有冲击。槽轮机构一般用在低速场合。
二、槽轮机构的主要参数
图示槽轮机构,为使槽轮开始转动 瞬时和终止转动瞬时的角速度为零, 以避免刚性冲击,圆销开始进入径 向槽或自径向槽脱出时,径向槽的 中心线应切于圆销中心运动的圆周 (O1AO2A)。
设z为均匀分布的径向槽数目,则
槽轮2转过22 = 2/z时,拨盘1的转
角为
21 π 22 π 2π / z
21 π 22 π 2π / z
在一个运动循环内,槽轮2的运动时
间tm与拨盘1的运动时间 t 之比 称为
运动特性系数。当拨盘1等速转动时, 该时间之比可用转角之比来表示。
对于只有一个圆销的槽轮机构,tm和t
不完全齿轮机构的应用实例
§6-4 凸轮间歇运动机构
1. 圆柱形凸轮间歇运动机构——凸轮1呈圆柱形状,滚子3 均布在转盘2的端面。
当主动凸轮1转过曲线槽所对应的角度t时,凸轮曲线槽
推动滚子,使从动转盘2转过相邻两滚子所夹的中心角 2/z,其中z为滚子数;
当凸轮继续转过其余角度(2t)时,转盘静止不动,并
自行车后轴上装设的内啮合齿式棘轮机构:
当踏板带动链轮3顺时针转动时,链轮3上的 棘轮齿推动棘爪4、棘爪4推动后轮5,使后 轮5顺时针转动,从而驱使自行车前进。
机械设计基础第6章间歇运动机构
间歇运动机构的应用
要点一
总结词
间歇运动机构在机械、汽车、轻工等领域有广泛应用。
要点二
详细描述
间歇运动机构在许多领域都有广泛的应用。在机械领域, 间歇运动机构被用于实现各种自动化生产线上的间歇传动 和定位。在汽车领域,间歇运动机构被用于实现汽车座椅 调节、车窗升降等功能。在轻工领域,间歇运动机构被用 于实现包装机、印刷机等设备的间歇传动和定位。此外, 间歇运动机构还可以应用于机器人关节、医疗器械等领域 。
印刷机械
在印刷机械中,槽轮机构 用于控制印刷版的进给和 退回。
纺织机械
在纺织机械中,槽轮机构 用于控制织布机的梭子进 给和退回。
05 其他间歇运动机构
凸轮机构
总结词
凸轮机构是一种常见的间歇运动机构,通过凸轮的转动实现间歇性运动。
详细描述
凸轮机构由凸轮、从动件和机架组成,通过凸轮的轮廓曲线与从动件之间的相 互作用,使从动件产生间歇性运动。根据需要,可以选择不同的凸轮轮廓曲线 以实现不同的运动规律和运动轨迹。
不完全齿轮间歇机构:设计一个不完 全齿轮机构,通过优化齿轮的设计参 数,减小机构的体积和重量,提高其 紧凑性。
实例二
槽轮间歇机构:设计一个槽轮机构, 通过调整槽轮的尺寸和转动惯量,降 低机构的振动和噪声,提高其工作性 能。
THANKS FOR WATCHING
感谢您的观看
的机构。
常见间歇运动机构
棘轮机构、槽轮机构、不完全齿 轮机构等。
运动特点
能够使主动件作连续转动,而从 动件作周期性的停歇。
章节目标
01 掌握间歇运动机构的基本原理和特点。
02 了解常见间歇运动机构的工作原理和应用。
03
学习如何根据实际需求选择合适的间歇运 动机构。
间歇运动机构
缺点
设计自由度小: 在分度数确定以后,运动系数也 随之确定而不能改变,这是其突出 缺点。 不适用于高速: 虽然振动和噪声比棘轮机构小, 但槽轮在启动和停止的瞬间加速度 大,有冲击。Leabharlann 一般取分度数 n =4~8。
(二)槽轮机构的类型 平面槽轮机构: 传递平行轴间运动
外槽轮机构
应用最广
内槽轮机构
停歇时间短,运动时间长,因此 传动更平稳 所占的空间小
(三)棘轮机构应用范围的扩展 棘轮机构除了可实现间歇送进、分度运动以外,还可 作为制动器和超越离合器使用。
制动器
发生事故时,止动棘爪3 突然伸出,可防止卷筒逆 转。
四、槽轮机构
棘轮机构是一种应用很广 泛的间歇运动机构。
组成和特点 类型 运动分析 设计要点
(一)槽轮机构的组成和特点
外槽轮机构 分度数 n=4
运动系数 : 运动时间占整个运动周
期的比例。
Td T
运动系数越小,工作台转位越快,可提高生产率。 但运动系数小,则启动和停止时的加速度可能太大。 所以,在设计中应慎重选择这一参数。
也有用动停比 k 来代替运动系数的,动停比是运动时
间和停歇时间的比值:
k Td Tt
显然,动停比和运动系数间有如下关系
缺点
冲击和噪声较大 定位精度差 只能用于速度不高、 载荷不大、精度要求 不高的场合
(二)棘轮机构的类型
齿式棘轮机构
外啮合 内啮合 结构紧凑,外形尺寸小。
摩擦式棘轮机构
外啮合 内啮合
➢ 克服了齿式棘轮机构冲击和噪声大的缺点, ➢ 可实现棘轮转动角度的无级调节, ➢ 运动精度较差。
内啮合齿式棘轮机构
和凸轮从动件的运动一样,如 果从动件运动规律不好,会产 生较大的加速度,从而带来惯 性负荷并产生冲击。
第六章 间歇运动机构
静平衡条件:分布于该回转件上各个质量的离心力(或质径积)的向量 和等于零,即回转件的质心与回转轴线重合。
me mb rb mi ri 0
动平衡:
质量分布不在同一回转面内的回转件,只要分别在任选的两个回转面内 各加上适当平衡质量,就能达到完全平衡。
动平衡条件:回转件上各个质量的离心力的向量和等于零;而且离心力 所引起的力偶矩的向量和也等于零。
第六章 间歇运动机构
主动件连续运动时,从动件周期性出现停歇状态的机构称为
间歇运动机构。 间歇运动机构主要用于自动生产线的转位机构、步进机构 、技术装置和轻工机械中。
间歇运动机构主要包括
棘轮机构 槽轮机构 不完全齿轮机构 凸轮间歇运动机构
棘轮机构
棘轮机构
双动式棘轮机构 摩擦式棘轮机构 摩擦超越式棘轮机构
飞轮设计
额定转速: 速度不均匀系数:
m
max min
2 min
1 2 2 J ( max min ) 2
2 m
max m
最大盈亏功: Amax Emax Emin
Hale Waihona Puke 飞轮转动惯量:J
Amax
第八章 回转件的平衡
绕固定轴作回转运动的构件叫作回转件(转子) 设回转件质量m, 质心偏离回转中心距离为r, 则回转件产生的离心力为:
F mr 2
同一轴上回转件转动产生的离心力系的合力和合力偶矩不等于零时,就会 对系统产生周期性的附加动压力,从而产生振动。
在实际应用中,应对回转件进行平衡试验,调整回转件的质量分布,使回 转件工作时离心力系达到平衡。
回转件的平衡
静平衡:
设回转件总质量m, 质心偏离回转中心距离为e, 平衡质量mb,其向径rb。
第6章间歇运动机构

二、棘轮机构的类型与应用
按轮齿分布: 外缘、 内缘、 端面棘轮机构。
棘轮 类型
按工作方式: 单动式、 双动式棘轮机构。
按棘轮转向是否可调: 单向、双向运动棘轮机构。
按转角是否可调: 固定转角、可调转角
调杆长摆角、加滑 动罩
按工作原理分 : 轮齿棘轮、 摩擦棘轮 演示模型
优点:结构简单、制造容易、工作可靠、从动轮运动 时间和静止时间的比例可在较大范围内变化。
缺点:从动轮在开始进入啮合与脱离啮合时有较大 冲击,故一般只用于低速、轻载场合。 2.类型及应用 类型:外啮合不完全齿轮机构、内啮合不完全齿轮机构
应用:适用于一些具有特殊运动要求的专用机械中。 如乒乓球拍周缘铣削加工机床、蜂窝煤饼压制机等。
将2φ1代入得:τ =1/2-1/z ∵ τ >0 ∴ 槽数 z≥3 可知:当只有一个圆销时, τ =1/2-1/z < 0.5 即槽轮的运动时间总是小于其静止时间。
如果想得到τ ≥0.5的槽轮机构,则可在拨盘上多装几个 圆销,设装有k个均匀分布的圆销,则拨盘转一圈,槽 轮被拨动n次。故运动系数是单圆柱销的k倍,即:
τ = k (1/2-1/z) ∵ τ ≤1 得: k ≤2z/ (z -2)
提问:why k≤1? 事实上,当k=1时,槽轮机构已经不具备间歇运动特性了。
槽数z
3
4
5 、6
圆销数k
1~6
1~4
1~3
运动系数τ 1/6~1 0.25~1 0.3~1
≥7 1~2 0.36~1
当z=4及k =2时 τ= k(1/2-1/z) = 0.5
t=2π/ω1 槽轮的运动时间为:
ω1
2φ1 90° 90°
第6章间歇运动机构
棘轮\12- 17a.avi
棘轮\1217b.avi
棘轮\12- 18a.avi
棘轮\1218b.avi
槽轮机构的几何尺寸计算
参数 槽数z 圆销数n 中心距L 回转半径R 圆销半径rs 槽顶半径s 槽深h 拨盘轴径d1 槽轮轴径d2 槽顶侧壁厚b 锁止弧半径r0 计算公式或依据 由工作要求确定 R 由安装空间确定 R=Lsinφ=Lsin(π/z)
其他常ห้องสมุดไป่ตู้机构简介
棘轮机构 槽轮机构 擒纵轮机构 历史 组成 凸轮式间歇运动机构 不完全齿轮机构 类型
间歇运动机构
非圆齿轮机构 分类 运动 应用 动画1 2 3 螺旋机构 运动形式 组成 运动分析 动画1 2 3 万向铰链机构 单万向 双万向 组合机构 特点 联动凸轮组合 齿轮凸轮组合 凸轮连杆组合 齿轮连杆组合
本章主要简单介绍槽轮机构、棘轮机构、 不完全齿轮机构和凸轮间歇运动机构的运动 特性。
间歇运动机构 棘轮机构
1 棘轮机构的组成及其工作特点
齿啮式棘轮机构 摩擦式棘轮机构
轮齿式棘轮机构结构简单, 易于制造,运动可靠,从动棘 轮转角容易实现有级调整,但 棘爪在齿面滑过引起噪声与冲 击,在高速时尤为严重。故常 于低速、轻载的场合用作间歇 运动控制。
间歇运动机构
间歇运动机构
二、棘爪工作条件 正压力-Pn 摩擦力-Ff 要求在工作时,棘爪在Pn和Ff的作用下,能自动滑入棘轮齿槽。 条件是两者对O’的力矩要 满足如下条件: Mpn>MFf 将两个力分解成切向和径向分量 Pn sinφ L > Fcosφ L ∵ F f = Pn f 代入得: tgφ > f =tgρ o2
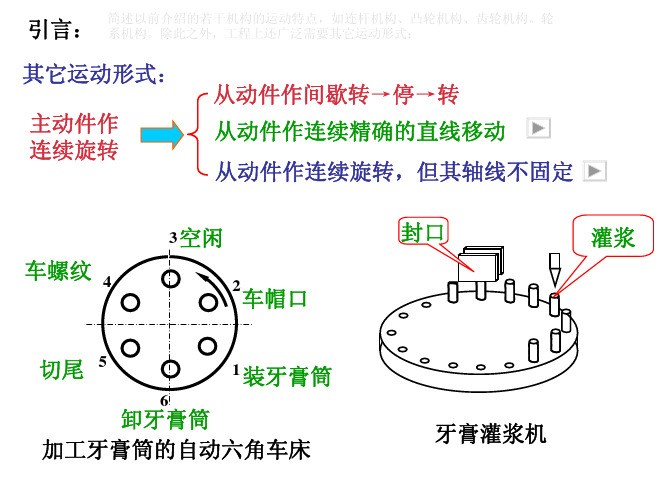
引言:
简述以前介绍的若干机构的运动特点,如连杆机构、凸轮机构、齿轮机构。轮 系机构。除此之外,工程上还广泛需要其它运动形式:
机械原理第六章间歇运动机构
凸轮间歇运动机构
1
原理
基于凸轮的间歇运动,通过一定形状的凸轮轮廓控制机器运动速度和时间,从而实现 间歇运动。
2
应用
常用于汽车引擎,巧克力包装机器,自动化机器等。
3
特点
与其他类型的间歇运动机构相比,凸轮间歇运动机构具有高可靠性,维修简单等优点。
滑块间歇运动机构
1 原理
2 应用
3 特点
使用滑块和凸轮等部件 来控制运动的起点和终 点,从而产生间歇运动。
摇杆间歇运动机构
1
用途
基于摇杆的间歇运动,常用于自动化冶炼和机器加工。
2
机理
摆动杆和连杆控制机械运动,摇杆轴心在曲柄轴心下方。
3
特点
实现高速和高精度的间歇运动,用于控制复杂机器和设备的动作。
齿轮间歇运动机构
1
工作原理
使用齿轮传递间歇运动。
2
应用
常用于以间歇运动的方式进行工作的机器,如钟表,计时器和自动售货机等。
常用于纺织机械,包装 机械,医学成像设备等。
用于控制复杂机器动作, 精度和可靠性高,结构 紧凑。
曲柄摇杆间歇运动机构
曲柄原理
转圆运动转为可控的线性运动,从而控制间歇 运动。
摇杆原理
将间歇运动传递给其他部件,实现更复杂的机 械运动。可以用于设备和机器的自动化。
曲柄摇杆间歇运动机构常用于发动机、飞行器和重型机器等。
机械原理第六章间歇运动 机构
学习机械原理第六章间歇运动机构,掌握各种间歇运动方式及其应用,为您 打开机械动力学的大门。
间歇运动机构的定义和概述
间歇运动机构定义
通过间歇运动把连续运动分成若干个部分。用于传递间歇运动的机构称为间歇运动机构。
间歇运动机构
影响最大有效拉力的几个因素:
初拉力F0 :F 与F0 成正比,增大F0有利于提高带的传动 能力,避免打滑。 但F0 过大,将使带发热和磨损加剧,从而缩 短带的寿命。
包角α : α↑ →F ↑ , 带所能传递的圆周力增加,传动 能力增强,故应保证小带轮的包角α1。
这一要求限制了最大传动比 i 和最小中心距 a 。 因为: i↑ →α1 ↓ ; a↓ →α1 ↓ 摩擦系数 f : f↑ →F ↑ , 传动能力增加 对于V带,应采用当量摩擦系数 fv
F = F1 – F2 = F1(1-1/e fα) F - 此时为不打滑时的最大有效拉力, 正常工作时,有效拉力不能超过此值
将F1 = F0 +F/2代入上式: F ( F 1 F )1 1 0 f 2 e
e f 1 整理后得: F 2 F0 e f 1
K zv
3、确定带轮基准直径dd1、dd2 N
9、计算压轴力 FQ
dd2 = i dd1(1 -ε), 4、验算带速v (v=5~25m/s) 8、确定初拉力 F0 圆整成标准值 dd d 0 Pc P N 0 1 180z Y2 d 1 57.c30 120 7 5、确定中心距 a 及带长 Ld P a P0 ≥0 7 ? z P K L K 6、验算主动轮的包角α1 7、计算带的根数 z
(四)、带传动的弹性滑动和传动比 1、弹性滑动 两种滑动现象: 打 滑 — 是带传动的一种失效形式,应避免 弹性滑动 — 正常工作时的微量滑动现象,不可避免 弹性滑动是如何产生的? 同样的现象也发生在 故松紧边单位长度上 的变形量不等。 由此可见:弹性滑动 是由弹性变形和拉力 带绕过主动轮时,由 差引起的。 于拉力逐渐减小,所 以带逐渐收缩,使带 相对于主动轮的转向 向后滑动。
机械设计基础 第6章 间歇运动机构
7、滚子楔紧式棘轮机构
原动件1逆时针转动或 从动件3顺时针转动时,在 摩擦力作用下,能使滚子2 楔紧在1、3形成的收敛狭隙 处,则1、3成一体,一起转 动;运动相反时,1、3成脱 离状态。
三、棘轮机构的特点和应用
1、特点
轮齿式棘轮机构结构简单、易于制造、运动可靠,棘 轮转角容易实现有级调整,但棘爪在齿面滑过会引起噪音 和冲击,经常在低速、轻载、用作间歇运动的控制中。 摩擦式棘轮机构传递运动平稳、无噪音,棘轮的转角 可以作无级调整。但难以避免打滑现象,因此运动的准确 性较差,不适合用于精确传递运动的场合。 2、应用 棘轮机构主要用于作进给、超越和转位等工艺动作的 控制。
§6-4 凸轮间歇运动机构
1、圆柱形凸轮间歇运动机构
如图6-11所示。凸轮1呈圆 柱形,滚子3均匀分布在转盘2的 端面。当凸轮连续转动时,转盘 实现单向间歇转动。可以通过改 变凸轮推程运动角得到所需的转 盘转动与停歇时间的比值。
图6-11
2、蜗杆形凸轮间歇运动机构 如图6-12所示。凸轮形状如同 圆弧面蜗杆一样,滚子均匀分布在 转盘的圆柱面上,犹如蜗轮的齿。 可以通过调整凸轮和转盘的中心距 来消除滚子与凸轮接触面间的间隙 以补偿磨损。
二、槽轮机构的特点和应用
槽轮机构构造简单,机械 效率高,并且运动平稳,因此 在自动机床转位机构、电影放 映机卷片机构(图6-8)等自 动机械中得到广泛应用。
图6-8
其缺点是在运动过程中的加速度变化较大,冲击较严重, 不适用于高速。
二、常见的槽轮机构的类型 1、外啮合槽轮机构 2、内啮合槽轮机构
图6-7
图6-9a
图6-9b
每当主动轮连续转过一圈时,图6-9a、b所示机构的 从动轮分别间歇转过1/8圈和1/4圈。二、不Fra bibliotek全齿轮机构的特点
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
槽轮机构适用于中速的场合。
3.凸轮式间歇运动机构
将主动凸轮的连续转动转化为从动转盘的间歇转动。此机构最突出的优点是
通过合理地设计凸轮廓线,可以减小其动载荷和避免冲击。因此,它适用于高速
运转的场合。凸轮式间歇运动机构结构紧凑、转位准确,但对凸轮加工精度要求
θmin=120。试求:1)棘轮的da,df,p;2)棘爪的长度L。
2) 装配自动机的工作台有6 个转动工位,为完成装配工序,要求每个工位
机械设计基础学习指导
4
停歇时间为tt=10s。当采用单销外槽轮机构时,试求:1)槽轮的运动系数τ;
2)销轮的转速n1;3)槽轮的运动时间td。
较高,加工较复杂,安装调整比较困难。
机械设计基础学习指导
2
. . tan . 1 f . tan . 1 0 . 15 . 8 . 5 .
4.不完全齿轮机构
将主动轮的连续转动转化为从动轮的间歇运动。其中,主动轮上只有一个或
几个轮齿。不完全齿轮机构很容易实现一个周期内多次动、停时间不等的间歇运
棘轮的最小转角Biblioteka min 为 θmin=s/l×360o=12o
所以z =360o/12o=30
(3)确定da,df 及p
da=mz=6×30mm=180mm
df=da-2h=(180-2×0.75×6)mm=171mm
p=兀m=3.14×6mm=18.85 mm
(4)确定棘爪长度L
传动平稳、无噪声,可实现动程的无级调节;但其运动准确性较差。棘轮机构通
常只适用于低速、轻载的场合。
2.槽轮机构
将主动销轮的连续转动转化为槽轮的单向间歇转动。平面槽轮可以传递平行
轴运动,而空间槽轮机构可以传递相交轴运动。内槽轮机构与外槽轮机构相比,
具有传动较平稳、停歇时间短、所占空间小等优点。槽轮机构结构简单,能准确
本章的重点是:间歇运动机构的工作原理、运动特点、功能和其
适用的场合。
本章的难点是:间歇运动机构的设计和选用。
1.棘轮机构
将主动件的往复摆动转换为棘轮的单向间歇转动。它可以实现间歇送进、制
动、转位、分度和超越离合等工作要求,且结构简单。齿式棘轮机构运动可靠、
转角准确;但动程只能有级调节,且噪声、冲击和磨损都较大。摩擦式棘轮机构
机械设计基础学习指导
1
第六章间歇运动机构
一、基本要求
1)了解间歇运动机构在设计中对从动件的动、停时间和位置的要求及对其
动力性能的要求。
2)掌握棘轮机构、槽轮机构的工作原理、特点、功能和适用场合,学会借
助手册对其进行运动设计。
3)了解不完全齿轮机构的工作原理、特点、功能。
二、重点、难点指导
动;但其加工复杂,在进入和退出啮合时有刚性冲击。如果安装瞬心线附加板,
可减小冲击,改善其动力特性。不完全齿轮机构常用于多工位、多工序的自动机
械或生产线中。
三、典型例题分析
例l 牛头刨床的横向送进机构如图6-1 所示。已知工作台的横向送进量
S=0.1mm,送进螺杆的导程l =3mm,棘轮模数m=6mm,棘爪与棘轮之间的摩擦因数
( )机构。
2) 在间歇运动机构中,当需要从动件的动程可无级调节时,可采用
( )机构。
3) 在棘轮机构中,棘爪能顺利滑过棘轮齿根部的条件是( )。
4) 棘轮机构中止回棘爪的作用是( )。
5) 在高速、高精度机械中,通常采用( )机构来实现间歇运动。
2.分析计算题
1) 试设计一外啮合棘轮机构。已知棘轮的模数m=10mm,棘轮的最小转角
f =0.15。试求:(1)棘轮齿面倾斜角β;(2)棘轮的齿数z;(3)棘轮的尺寸
da,df,p;(4)确定棘爪的长度L。
解(1)确定棘轮齿面倾斜角β。为了使棘爪在推动棘轮时能始终紧压
齿面滑向齿根部,要求棘轮齿面倾斜角必须大于棘轮与棘爪之间的摩擦角,即
β>φ。
而
取β=10o
(2)确定棘轮的齿数z
L=2p=2×18.85mm=37.70 mm
机械设计基础学习指导
3
图6-1 牛头刨床的横向送进机构
四、复习思考题
1.间歇运动机构设计中的三个基本要求是什么?
2.棘轮机构有几种类型?它们分别有什么特点?适用于什么场合?
3.棘轮机构动程和动停比的调节方法有哪几种?
4.什么是棘轮齿面倾斜角β?应如何选取?为什么?
5.内槽轮机构与外槽轮机构相比有何优点?
6.何谓槽轮机构的运动系数?运动系数τ 为什么大于0 而小于1?
7.与棘轮机构、槽轮机构相比,凸轮式间歇运动机构的最大优点是什么?
8.不完全齿轮机构与普通齿轮机构的啮合过程有何异同点?
五、自测题
1.填空题
1) 当主动件作等速连续转动,需要从动件作单向间歇转动时,可采用