法如 d扫描仪 软件SCENE教程
法如 d扫描仪配套软件SCENE教程
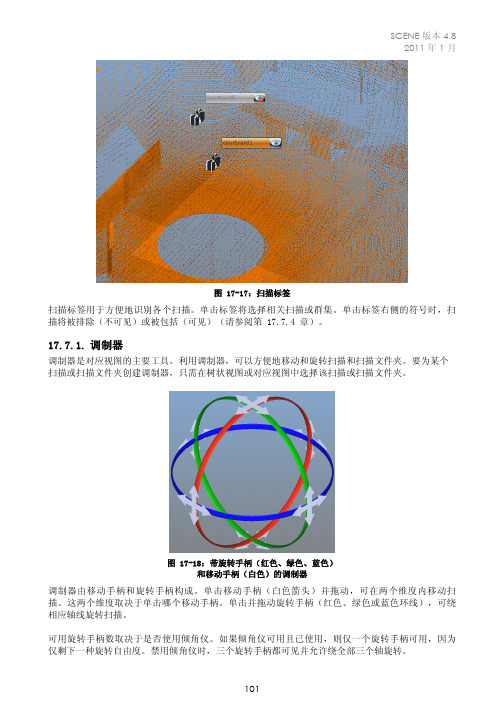
图 17-17:扫描标签扫描标签用于方便地识别各个扫描。
单击标签将选择相关扫描或群集。
单击标签右侧的符号时,扫描将被排除(不可见)或被包括(可见)(请参阅第 17.7.4 章)。
17.7.1.调制器调制器是对应视图的主要工具。
利用调制器,可以方便地移动和旋转扫描和扫描文件夹。
要为某个扫描或扫描文件夹创建调制器,只需在树状视图或对应视图中选择该扫描或扫描文件夹。
图 17-18:带旋转手柄(红色、绿色、蓝色)和移动手柄(白色)的调制器调制器由移动手柄和旋转手柄构成。
单击移动手柄(白色箭头)并拖动,可在两个维度内移动扫描。
这两个维度取决于单击哪个移动手柄。
单击并拖动旋转手柄(红色、绿色或蓝色环线),可绕相应轴线旋转扫描。
可用旋转手柄数取决于是否使用倾角仪。
如果倾角仪可用且已使用,则仅一个旋转手柄可用,因为仅剩下一种旋转自由度。
禁用倾角仪时,三个旋转手柄都可见并允许绕全部三个轴旋转。
有两种方式来禁止调制器使用倾角仪:•通过在扫描的扫描拟合的属性对话框中取消选中倾角仪复选框,可为单个扫描禁用倾角仪。
•通过在工具 Æ 选项 Æ 匹配 Æ 布置扫描中关闭倾角仪使用,可为所有扫描禁用倾角仪。
提示:即使子扫描全都不使用倾角仪,扫描文件夹的调制器仍将具有三个旋转手柄。
要进行较为轻松的扫描布置,可以使用三个允许更正错误操作的按钮。
还原上一个变形按钮 可用于将扫描返回上一个位置。
重新应用变形更改按钮 用于重新应用恢复过的变形。
还原初始变形按钮 最终还原创建调制器时扫描具有的初始变形。
这三个按钮在对应视图工具栏中以及在每个操作后出现的动态工具栏中都可用。
请注意,取消选中扫描将导致调制器消失并清除以前的所有变形。
提示:从顶部、右侧或背面查看场景时使用调制器(使用工具栏中的按钮)较为方便。
提示:不要忘记操作扫描的水平位置。
从侧面查看场景时最容易完成此操作。
17.7.2.对应线在对应视图中,所有对应对象都通过彩色直线来可视化。
Trimble Scene三维激光扫描仪操作流程
目录1 概述 (2)2 外业数据采集 (2)2.1 外业踏勘 (2)2.2 控制点数据 (2)2.3 点云数据 (10)3 内业软件简介 (10)3.1 TRIMBLE Scene的组成 (11)3.2 快速视图 (12)3.3 平面视图 (13)3.4 3D立体显示 (14)3.5 快捷图标说明 (14)3.6 点云数据导出 (16)3.7 测量距离 (17)4 内业数据处理流程 (17)4.1 数据整理 (17)4.2 加载数据 (18)4.3 选择参考点、面 (18)4.4 靶球、面配对拼接 (19)4.5 应用彩色点云 (21)4.6 导出点云建立模型 (21)1 概述随着测绘技术的日益发展,高效,简便的各项技术相继问世。
TRIMBLE三维激光扫描仪为当前世界最小、最轻的激光扫描仪。
与传统的二维平面图相比,任何人都会发现三维图像的优点。
因为激光扫描仪可以在每秒得到约百万测量点,并产生其周围环境的精确三维图像。
TRIMBLE三维扫描仪尺寸为24x20x10 C㎡重量:5kg采用集成彩色相机,7000w像素的无视差彩色相机高性能电池可持续工作5小时数据管理采用便携带的SD卡测量速度为976000点/秒误差±2mm视野305°(垂直)x 360°(水平)数据处理流程分为:外业激光数据采集、内业激光数据拼接、后期三维建模、数据集成系统。
2 外业数据采集2.1 外业踏勘每个项目开始之前,必须对需要采集数据的地点进行踏勘,对其周围的地理环境、天气因素、人为影响作一个系统的了解,做好计划,并防止采集数据发生的意外。
2.2 控制点数据为了对扫描图像进行绝对定向,需在整个房屋附近设置多个靶球或靶点,并利用仪器,测量出每一个点的位置。
靶球放置必须保证前后站都能看到。
放置好靶球后,架起仪器开机。
开机后界面如下:仪器为触摸屏操作,点击管理选项,进入管理对话框,在项目里建好此次扫描的项目文件,并命名。
Focus3D产品中文手册
/LaserScanner/cn
中国分支机构 地址:上海桂林路396号3号楼1层 邮政编码:200233 电话:+86(21)6191-7600 传真:+86(21)6494-8670 电子邮件:chinainfo@
日本分支机构 716, Kumada, Nagakute-cho, Aichi-gun Aichi, Japan 480-1144 电话:(81)561.63.1411 传真:(81)561.63.1412 电子邮件:japan@
应用
逆向工程:没有可用施工图和(或)CAD数据的产品和组件副本 内部固定件和配件:船舶、汽车或飞行器复杂内部的精确三维CAD证明文 件,作为改造规划的依据。 测量证明文件:复杂机器组件生产现状的完整三维证明文件 质量控制:大型、复杂组件(例如动叶片、涡轮、船舶推进器等)的精确三 维证明文件和尺寸检验。
应用
填挖方:为填挖控制提供简单精确地体积和尺寸 变形控制:记录变形过程以及监测方法 立面检测:安装前建筑外壳和立面组件的三维检测 结构分析和维护:快速有效地确定支护结构的承载能力及其磨损程度 自由部件检测:精确确定复杂部件以及自由部件的坐标 建模:根据现有的精确几何记录进行转换或者延伸施工进度监控:在施工 过程中进行无缝捕捉和监控,来建立合法专门的文档
ü
可以将拍摄的照片简单地转换成正射照片和CAD
犯罪现场和事故调查
便携式Focus3D激光扫描器也非常适合进行犯罪和事故现 场或保险损失的快速、完整三维记录。犯罪或事故后续重建 中的所有相关细节均包含在内。同样,为了开发适合事件的 相应安全概念,激光扫描可输出相关三维拓扑信息。
优点
ü
犯罪和事故现场的永久、详细三维存档
软件
FARO公司Focus3D激光扫描器和SCENE软件可以很好地和建筑和测量领域 内的主要软件兼容。SCENE灵活的接口可以连接到AUTOCAD,REVIT以及其他 CAD软件(例如Rhino, Microstation, Nemetschek and ArchiCAD)。
flexscan3d 3教程

Scan3D 3教程注:1.本软件由必需要有注册码或加密狗才能使用,直接复制是打不开的。
2.电脑必须是WIn7 64位,独显卡,8G内存。
3.一、校准校准很重要,是一个扫描的数据获取。
A. 进入校准模式,新建一个校准,NAME(名字)随便一个,不能中文,default Patr(地址),不要选择C盘就好。
Calibration type 选择第一个,DUO 双镜头扫描仪。
点击OK.接着再确定一次.B.选择相机,camera1扫描仪左边的相机,camera2,则是右边的相机,Camera type 选择SCZ或SCL,由相机型号而定。
C.校准板,注意,箭头向上,SIZE要和校准板上面所标注的一样.D.接着我们调整光栅和相机的同心度,和距焦接下来,打开扫描仪控制在右侧的应用程序,并执行以下步骤:1将光栅的对焦模式。
2投影机的亮度滑块滑动方式的权利。
3设置快门速度,用16.664调整相机的位置,使相机的中心点对准光栅的焦点,即大红色十字和光栅的中心点重合。
5 现在调整相机的光圈,使刻度板清晰可见,没有表现出任何曝光的红点,且亮度最大。
(光圈就是镜头里面那个环)6 调整相机的微焦距,轻旋镜头外环,使之前最清晰.E. 把校准板位置放在两个相机都能看到的地方的,单击左边的,capture捕获,移动校正板,依次只左至右,再左侧校正板,再右侧再上下都捕获一些数据,大概15-50上之间的图像,接着点选红色的大按键-- calibrate 计算图像位置。
校准的覆盖率达到75%以上就是个很成功的扫描校准了.二、扫描选择“工程”环境1.新建一个工程,注:不能是中文,文件会很大不要存在C 盘2.对齐方式选择“标记点”,无标记点时就选择“无”3.清理级别,可以删除小碎面。
大扫描对像选级别大的,小则选清理小的。
4.把要扫描的对你放置相机视野中间。
确定最小有4个标记点在两个相机视野内均可见。
5.单击红色scan开始扫描。
单次5秒内完成、6.旋转被扫描的样品(和标记点一起旋转)大约30度。
法如3D扫描仪入门教程ppt课件
按选择配置文件按钮,更改 和选择一个预义的扫描配置文件。 您会获得所有可用配置文件的列 表。 如果需要,您可以返回参数 屏幕直接更改扫描参数;否则可 转到主屏幕开始扫描
• 分辨率和质量:所选分辨率(以百万 点为单位)和所选质量等级。 单击可 调整这些值。 • 扫描范围: 扫描区域,包含其水平和 垂直起始角度和终止角度。 按此按钮 可调整扫描区域。 • 彩色扫描: 打开或关闭捕获彩色扫描。 • 高级设置: 更改硬件过滤器设置。 • 眼睛安全距离 [m]:径向和轴向眼睛 安全距离。 遵守这些距离可防止眼睛 受到伤害。
9. 关闭扫描仪电源 在扫描仪完全关闭后,取 出电池,并将设备妥善存放到 保护盒中。
法如3D扫描仪 入门教程
1. 扫描仪装运保护箱。 2. AC 电源线 3. 带电源线的外部电源 存储卡 盒 6. USB 读卡器 7. 激光护目镜 8. 快速入门指南 9. 包含 SCENE 软件和 用户手册的 CD 10.快卸装置
操作 FARO Laser Scanner Focus 3D时,必须保持眼睛安全距 离。在眼睛安全距离以内操作的工作 人员必须佩戴激光护目镜。 未佩戴 激光护目镜的人员禁止进入此区域如 使用不当,可能会伤害眼 睛。
4.为扫描仪供电 激光扫描仪可以使用电池或 电源单元进行操作
打开激光扫描仪的电池舱。 翻转电池,使其类型标签朝上,使 电池触点指向扫描仪,直线推入 电池,并将其向内滑入到电池舱 底部,直至固定件“咔嚓”到位。 关上电池舱盖。
5. 接通扫描仪电源 按“开/关”按钮开始 启动过程,此时扫描仪 LED 呈蓝色闪烁。当扫描 仪准备就绪时,LED 会停 止闪烁并开始呈蓝色亮起; 操作软件的主屏幕会出现 在集成触摸屏上。
3.将 SD 存储卡插入扫描仪 1)打开 SD 存储卡插槽护盖。 2)插入 SD 卡,让带缺口的边缘朝 所示方向,直至发出“咔哒”声。 SD卡的侧边可能有保护锁开关。 请确保此保护锁开关处于打开状 态,以使SD卡可写入。 3)确认存储卡的方向。 如果您按错 误的方向强行插入存储卡,可能 会损坏 SD 卡、卡插槽或卡中的 数据。 4)关上护盖。
SCENE使用指南
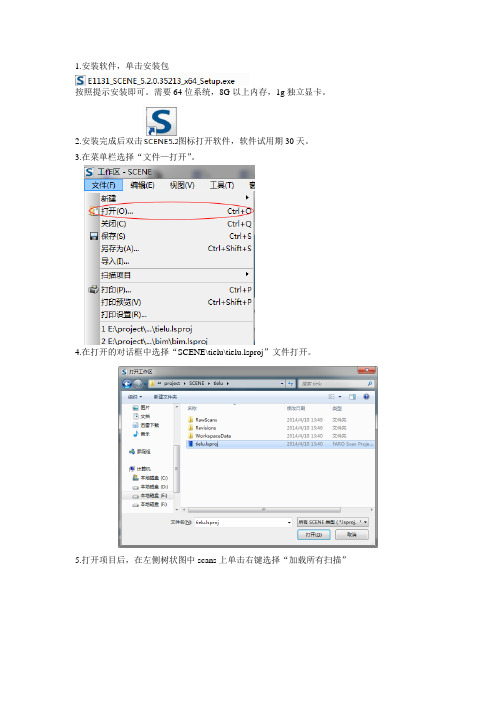
1.安装软件,单击安装包
按照提示安装即可。
需要64位系统,8G以上内存,1g独立显卡。
2.安装完成后双击图标打开软件,软件试用期30天。
3.在菜单栏选择“文件—打开”。
4.在打开的对话框中选择“SCENE\tielu\tielu.lsproj”文件打开。
5.打开项目后,在左侧树状图中scans上单击右键选择“加载所有扫描”
6.加载完成后在工具栏单击创建3D视图命令,右侧显示区出现点云视图。
7.通过工具栏中的浏览工具浏览点云,一般使用旋转命令。
8.通过视图工具快速切换视角。
9.通过设置旋转中心,以某一点为中心旋转缩放。
9.通过量测工具可测量距离尺寸。
10.完成后关闭软件如果提示
选择“否”,否则会修改原始数据。
法如3d激光扫描仪技术手册2
FARO-LS - 签名文件,用于将 SD 卡识别为 Focus3D 卡。在启动扫描后, 会立即自动创建此文件夹。
Focus3D 错误消息
错误消息
描述
操作
内部错误:无效参数
扫描仪的参数不一致。
请重新启动扫描仪。如 果重新启动后仍然出现 该问题,请与 FARO 客
第 8 章:附录
可用替换零件
• 带电源线的供电单元 • AC 电源线
• 装运箱
LED 行为
“
启动 / 停止 ”
按钮下方的 LED
扫描仪光学镜 一侧的 LED
扫描仪传感器 一侧的 LED
扫描仪底座上 的 LED
扫描仪关闭,பைடு நூலகம்部 电源未连接
关闭
关闭
关闭
关闭
扫描仪关闭,外部 电源已连接
关闭
蓝色持续亮起 蓝色持续亮起 蓝色持续亮起
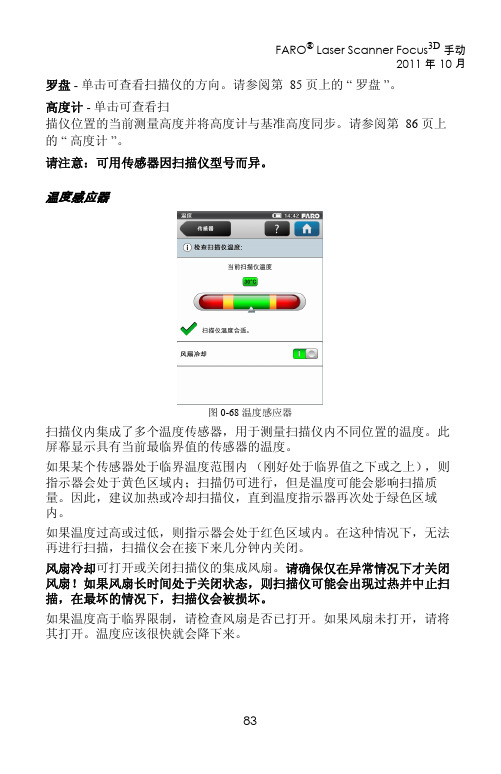
图 0-76 Video Guide
“ 后退 ” 按钮 - 每单击一次会使视频后退 30 秒。 “ 播放 / 暂停 ” 按钮 - 开始 / 继续或暂停播放视频。 “ 快进 ” 按钮 - 每单击一次会使视频快进 30 秒。 “ 停止 ” 按钮 - 停止播放视频。 “ 音量 ” 按钮 - 单击可更改视频指南的音量。
90 第 6 章:Focus3D 操作软件
FARO® Laser Scanner Focus3D 手动 2011 年 10 月
第 7 章:技术数据
FARO® Laser Scanner Focus3D 20 和 120 受美国专利 7,869,005。 91 第 7 章:技术数据
FARO® Laser Scanner Focus3D 手动 2011 年 10 月
FARO快速入门流程

SCENE软件处理数据流程1打开软件
2.新建一个项目
3.新建项目后选择工作路径
4.将需要处理的数据拖拽到新建项目下
5.右键加载数据
6.加载完成后右键选择三维视图
7.打开三维视图后选择左上角的地球标志移动
8.选择多边形选择器,选择要保留的数据进行删除
9.数据删除过程
10.以此类推其他数据一样处理,如上图所示还可以选择删除需要删除的部分进行删除,根据个人需要进行处理。
FARO三维激光扫描仪scene自动拼接流程1.打开软件
2.新建一个项目
3.新建项目后保存工作路径
4.选择需要拼接数据拖拽到新建项目下
5.加载点云数据,在Scans下加载所有扫描。
6.加载所有扫描点完成后还在Scans下操作,正在预处理,预处理扫描。
7.预处理扫描后,需要保存扫描数据路径。
8.预处理选择框。
用标靶球拼接只需要选择一下几个选项,在
9.自动查找球体的过程。
10.数据拼接完成效果。
FARO-FOCUS3D 法如三维激光扫描仪

软件
Focus3D和SCENE软件可以很好地和建筑和测量领域内的主要软件兼容。 SCENE灵活的接口可以和AUTOCAD,REVIT以及其他CAD软件(例如Rhino, Microstation, Nemetschek and ArchiCAD)连上。
特点
√ 快速简单完整地记录建筑物和建筑位置的准确情况 √ 革命性的性价比 √ 扫描数据的在线共享
FARO Offices
Asia Pacific Headquarters
FARO singApORe pte ltd No. 3 Changi South Street 2 #01-01 Xilin Districentre Building B Singapore 486548 Tel: (65) 6511.1350 Fax: (65) 6543.0111 Email: salesap@ URL:
√ 超高效率
120m的超长范围,水平传感器,紧凑的结构, 方便的操作以及自动校准的功能 与传统的激光扫描仪相比, 可以节省50%的扫描和运行时间。
√
精确快捷
Focus 以976,000点/秒的速度 构造一个精确到毫米级的三维影像。
FARO是领先的三维测量系统的制造商。而Focus 3D是一款革命性的,高效能的,可触摸屏的三维激光扫描仪。
/LaserScanner
China Office Floor 1, Building 3 No. 396 Guilin Road Shanghai, 200233, China Tel: (86) 21.6191.7600 Fax: (86) 21.6494.8670 Email: chinainfo@
工具箱
√ 方便携带 另外,配备一个防水坚固耐用的特制箱子, 用于装载各个配件, 而符合人体工程学设计的背包也可以用来容纳三脚架
法如激光扫描仪手册1
第 1 章:简介 ............................................... 1
第 2 章:设备 ............................................... 5
第 3 章:安全预防与维护 ............................. 7
扫描参数概述 ...................................................................................44 使用人工目标增强扫描环境 ..............................................................46
FARO Technologies Inc. 的内部控制文件位置: \CONTROL\RECORDS\05MANUFA\PARTSPEC\0_V6\02_Documentation\ E874_FARO_LASER_SCANNER_FOCUS3D_MANUAL_CN.pdf
FARO® Laser Scanner Focus3D 手动 2011 年 10 月
一般安全信息 .................................................................... 7 电气安全性 .........................................................................8
使用以下装置对电池充电:Focus3D ................................................27 电池使用...............................................................27 使用 PowerDock 电池充电器对电池充电 ........................................28
3D_Scanner使用说明书(更新版)

扫描流程示例以下将以设备自带模型Palm Tree(热带树)为例,介绍使用3D Scanner HD获取物体三维尺寸数据并整合输出的基本方法及步骤。
(一)3D Scanner HD的安装与调试整套扫描仪设备,如图1所示,由主机、基座、支杆、支撑台、数据线、电源线及连接配件组成。
(1)(2)(3)(4)(5)(6)(7)(8)(9)图1 3D Scanner HD扫描仪全部组件展示(1) 主机正面(2) 主机反面(3) 基座正面(4) 基座背面(5) 一端带螺纹的支杆(6) 支撑台(7) 数据线及电源线(8) 支撑夹(9) 连接配件1.主机的安装1)将电源线接口的一头插入主机背面相应位置,如下图2所示。
图2 电源线与主机的连接2)使用USB线连接主机及电脑,如图3所示,电脑要求配置有2.0以上的USB接口。
图3 连接主机及电脑2.基座的安装1)从基座背面凹槽内抽出数据线与主机相连,如图4所示,同时保证基座仍能平稳置于桌面上。
(1)(2)图4 基座与主机的连接2)将支杆带螺纹的一端旋入基座5个螺纹孔中任一个中,如图5所示。
(1)(2)图5 安装支杆3)将支撑台空心圆管套入上步安装好的支杆内,并用螺丝固定,如图6所示,尽量将支撑台放置于主机镜头下侧。
(1)(2)(3)图64)将支撑夹装入套管内,并用螺钉固定,如图7所示。
(1)(2)图7 支撑夹与套管的安装5)将套管套入空心圆管内,移至合适位置后用螺钉固定,如图8所示。
支撑夹主要用来固定物件。
(1)(2)图8 套管与支杆的固定6)在支杆一头套上橡皮套,如图9所示,并得到如图10所示的显示效果。
图9 在支杆顶部套上橡皮套图10 装配完好的扫描仪(二)第一次扫描(Scan)扫描步骤如下所示:1.模型前处理(1)喷涂显影剂一般情况下,如果模型颜色过深(如黑色、深蓝色、深灰色)之类,扫描过程中机器易将其与环境色混淆,造成点云缺失,故扫描前需要先在其表面喷涂显影剂。
dimension fastscan中文操作手册

Dimension FastScan 中文操作手册一、前言在科研和工业领域,3D扫描技术被广泛应用,其在材料分析、逆向工程、文物保护等方面都展现出了重要的作用。
而Dimension FastScan 作为一款先进的3D扫描仪,具有快速、高精度、易操作等特点,受到了广泛关注和应用。
本文将结合Dimension FastScan的操作手册,详细介绍其使用方法,旨在帮助用户全面了解和熟练操作这一先进设备。
二、准备与启动1. 卸载设备在使用Dimension FastScan之前,首先需将设备放置在稳定的台面上,并连接相应的电源线和数据线。
接下来,启动电源开关,并等待设备自检完成。
2. 软件运行打开电脑,将附带的软件光盘插入光驱,安装Dimension FastScan 软件。
安装完成后,双击桌面图标,打开软件界面,即可进行扫描准备工作。
三、扫描操作1. 扫描准备在软件界面中,选择扫描模式和相关参数,例如分辨率、扫描范围等。
根据实际需求,调整好这些参数,以确保扫描效果达到预期。
2. 扫描开始将待扫描的物体放置在扫描范围内,并调整相机角度,使其能够完整地覆盖待扫描物体的所有表面。
确认无误后,点击软件界面上的“开始扫描”按钮,进行数据采集。
3. 扫描完成与数据处理待扫描完成后,软件会将实时的扫描数据呈现在界面上,用户可以对数据进行编辑和处理,例如去除噪点、填补缺失等。
软件还提供了丰富的数据输出格式,用户可以根据自身需求选择合适的格式进行导出。
四、总结与展望通过本次操作手册的详细介绍,相信读者已经对Dimension FastScan 的使用有了全面的了解。
在实际操作中,用户还需要根据设备手册和实际情况进行深入的熟悉和实践,以达到熟练运用的水平。
在未来,随着3D扫描技术的不断发展,相信Dimension FastScan也将迎来更多的应用场景,为科研和工业领域带来更多的便利和可能。
个人观点:作为一名从事3D扫描技术研究多年的工程师,我对Dimension FastScan的使用体验可以说是非常良好的。
法如三维扫描仪的使用流程
法如三维扫描仪的使用流程1. 法如三维扫描仪简介•法如三维扫描仪是一种高精度、高效率的三维扫描设备。
•它可以将物体的真实轮廓和纹理以数字化的方式呈现出来,广泛应用于制造、文化艺术、医疗等领域。
2. 前期准备在开始使用法如三维扫描仪之前,您需要做一些前期准备工作,以确保扫描的准确性和顺利进行。
- 确保扫描区域干净整洁,无杂物和其他干扰因素。
- 确保光线充足,避免强烈的反光和阴影。
- 将扫描仪放置在稳定的平台上,以防止抖动和干扰。
3. 连接设备•将法如三维扫描仪的电源线插入电源插座,并确保电源供应正常。
•使用USB线将扫描仪与电脑或其他数据采集设备连接。
4. 启动软件•在计算机中安装法如扫描软件,并启动该软件。
•点击软件界面上的“扫描”按钮,打开扫描界面。
•在扫描界面上,您可以选择扫描模式、设定扫描参数等。
5. 扫描设置•在扫描界面上,您可以选择不同的扫描模式,如全景扫描、自由扫描、精细扫描等。
•针对不同类型的物体,您可以调整扫描参数,包括曝光时间、分辨率、滤波等。
•确保设置合理,以获得最佳的扫描效果。
6. 开始扫描•将要扫描的物体放置在扫描仪的扫描区域内。
•点击软件界面上的“开始扫描”按钮,开始进行扫描。
•扫描仪会自动旋转并采集物体的各个角度,同时拍摄图像。
•确保扫描过程中物体保持静止,并且尽可能避免遮挡和移动。
7. 扫描后处理•扫描完成后,您可以在软件界面上进行后续处理操作。
•您可以对扫描数据进行对齐、融合、重建等操作,以生成完整的三维模型。
•您还可以对模型进行编辑、修复、优化等,以满足不同的需求。
8. 导出和应用•在完成扫描数据的后处理后,您可以将结果导出为常见的三维文件格式,如OBJ、STL等。
•导出的三维模型可以用于虚拟现实、动画制作、3D打印等多个应用领域。
•您还可以将模型导入CAD软件进行进一步设计和分析。
9. 注意事项•在使用法如三维扫描仪时,请确保室温适中,避免过热或过冷。
•扫描过程中,若出现异常或错误提示,请及时停止扫描,并检查设备设置和连接是否正常。
法如三坐标使用教程

2023-1-28 Faro三坐标使用教程1、三坐标的安装磁吸底座: 0的方向为松开 1的方向为吸紧。
转动时使用10mm 的内六角扳手。
磁吸底座安装在BASE 上,手无法推动即为安装完成。
BASE 需为干燥干净的平面。
双手插入取出槽,扶着探头,将探头卡扣与主杆卡扣扣合,如左图所示。
之后一只手插入取出槽,另一只手握住主体把手,将三坐标测量仪从包内取出,竖直摆放并搬运。
取出槽取出槽取出槽卡扣箱内扣合取出槽主体把手三坐标底部扣具与磁吸底座对齐并旋紧,之后扣出把手,将扣具旋紧,保证稳定性。
图中接口从左至右分别为: AUX 音频输入接口RG45网口,联网远程数据传输 USB-A 母头接口,用于输出电力 USB-B 母头接口,用于接数据线 +24V 2.71A 电源接口左图中按钮从上到下分别为WIFi 和蓝牙,按钮两边为电池电量指示更换检测头时,将如右图的把手抠下,即可将检测头取下,目前检测头有6mm 和8mm 两种,根据实际需要进行选用。
注意:抠下把手时,需用手握住检测头,避免检测头掉落。
竖直摆放并搬运电源线插入之前,需在把手上绕两圈,防止电源线被拉断,插入时,箭头朝上,电源线拔下时,需先将外壳向后推后拔出。
数据线插入示意图2、创建和保存在桌面上双击,打开PolyWorks,进入工作区管理器界面。
在工作区管理器中点击(开始),正常会跳出如下窗口。
如果点击(开始)保存工作区保存建议:新建文件夹,名称为PolyWorks ,在PolyWorks 文件夹中新建以项目名称为名称的文件夹,更改工作区文件名称为项目名称,之后点击保存。
点击保存之后,弹出项目保存窗口,项目名称和工作区名称保持一致保存完成后即可进行后续的测试。
之后在上面正常出现的窗口中点击(保3、连接与校准在窗口左下角找到点击的小箭头,弹出下方的列表,选择Faro Arm点击“探测设备属性”,弹出窗口,选择第一项,对测头进行校准。
校准步骤:将校准块安装在夹具上,将测头竖直轻插校准块中心的圆槽中,之后,按住三坐标的绿色按钮,缓慢向校准块的一侧开口倾斜,之后松开绿色按钮,测头回到竖直状态,重复上述步骤3-4次,每次向不同的开口倾斜,测量点超过2000时,测头位于校准块的初始竖直状态下,按一下红色按钮结束校准。
基于三维激光扫描技术的物体面积的测量
基于三维激光扫描技术的物体面积的测量作者:黄炜钰齐东平路永鑫沈楚苇来源:《科学与财富》2016年第04期摘要:三维激光扫描技术近年来发展迅速,可海量、快速地获取被测对象的三维坐标,构建出相应精确的三维立体模型,已经成功的在地形测绘、大型结构、飞机船舶制造、公路铁路建设等领域里应用。
本文以已知半径铅球为例,将三维激光扫描仪运用到测量实际物体横截面积中。
关键词:三维激光扫描技术;三维激光扫描仪;三维立体模型;横截面积0 引言维激光扫描技术是一门新兴的测绘技术,将是测绘领域GPS技术之后的又一次技术革命,三维激光扫描仪已经成为测绘仪器发展的重要方向。
为提高现有三维激光扫描仪的性能,拓展其应用范围,本文着重研究了三维激光扫描仪的全站化的方法[1]。
随着激光产业链的逐渐形成,在测速、测距、测面积等方面都有广泛运用,三维激光扫描仪的诞生更是为人们带来福音,高精度的测量帮助了以CAD系统为主的绘制,减少了因不准确产生的误差。
本文将以美国法如三维激光扫描仪为例,以已知半径的铅球为对象,在FARO SCENE辅助下,扫描出铅球横截面积为0.0049π2m2 。
该结果为三维激光扫描仪扫描物体的实用性和准确性做出了可靠的结论,提供了可参考的依据。
1 三维激光扫描技术本系统激光扫描单元选用美国法如公司近年推出的一款性价比较高的小型激光扫描仪FARO Focus 3D,具有高精度、高分辨率、通过内置触摸屏进行直观控制、尺寸小、集成快速充电电池、实现高移动性等许多优点,该扫描仪使用相位偏移技术测量距离,其扫描的距离范围在低环境光线和正入射到90%反射面上的条件下为0.6-120m,在正入射到10%不光滑反射面上时为0.6-20m,完全满足测量需求,扫描最大频率可达到97.6万点/秒,系统测量误差可以控制在±2mm,精确度达到毫米级[2]。
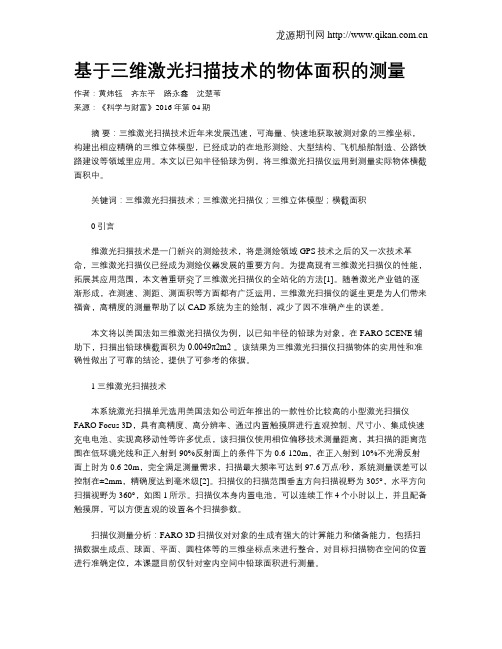
扫描仪的扫描范围垂直方向扫描视野为305°,水平方向扫描视野为360°,如图1所示。
FARO-FOCUS3D 法如三维激光扫描仪
无所不能
√
FARO的互联网功能是一个通过网络简单安全地共享数据的强大工具, 只需简单的点击操作,Focus 3D 的SCENE软件就可以把即时的数据 传到一个安全的服务器。 客户和委托人可以很轻易地看到三维数据, 还可以利用免费的SCENE LT软件加以详细地利用。 这一切都无需额外花费。
/webshare
应用
填挖方:为填挖控制提供简单精确地体积和尺寸 变形控制:记录变形过程以及监测方法 立面检测:安装前建筑外壳和立面组件的三维检测 结构分析和维护:快速有效地确定支护结构的承载能力及其磨损程度 自由部件检测:精确确定复杂部件以及自由部件的坐标 建模:根据现有的精确几何记录进行转换或者延伸 施工进度监控:在施工过程中进行无缝捕捉和监控,
犯罪现场和事故调查
特点
√ Focus3D也是快速记录犯罪或事故现场三维场景的一种理想工具。
所有犯罪或事故相关的细节都能清晰的重建。
同样,应对重要事件需要开发相应的安全系统,
√
激光扫描也可为其将提供相关的3D拓扑信息
√
为犯罪现场和事故调查详细地建档 简单地仿真犯罪和事故现场 通过虚拟现实来做应急计划和制定安全措施
性能规格*
型号
Focus3D 20 Focus3D 120
型号
Focus3D
* 详询www. /focus
距离
0.6 – 20m 0.6 – 120m
扫描时间
标准扫描: 黑白:3分钟 彩色:5分钟
视角
扫描频率
系统距离误差
305°(垂直) x 360°(水平)
集成彩色相机
7000 万像素
制造工业和数字工厂
精确的三维数据,省时省力省花销
炼油厂,发电厂以及制造厂有着复杂的结构, 有时为了转换和维修拓展, 需要精确的三维CAD数据。 FARO Focus 3D可以轻松精确完整地捕捉三维数据。
三维扫描仪的使用方法

三维扫描仪的使用方法
三维扫描仪的使用方法
三维扫描仪使用方法
三维扫描仪是一种以网状光线为基础的测量技术,它可以获取物体的三维信息,为产品设计和检测提供可靠的数据。
它可以准确测量任何形状的物体,包括复杂的孔洞、缺陷和细微的细节。
三维扫描仪的使用非常简单,只需要安装好软件,将三维扫描仪放在测量物体的前面,然后按下扫描按钮,就可以获取准确的三维信息。
另外,你也可以通过软件设置扫描的参数,以获取更精确的数据,比如扫描速度、分辨率等。
在使用三维扫描仪时,应注意物体表面的平整度,以及物体扫描时的环境照明。
平整度越高,扫描数据越准确,而环境照明可以帮助三维扫描仪获取更多的细节信息。
三维扫描仪的使用非常方便,它的准确性和精确度已经得到了证实,因此越来越多的企业开始使用它来满足客户的需求。
它的使用不仅可以节省时间和金钱,还可以提高产品质量,增加技术水平,提高生产效率。
法如3D扫描仪入门教程

操作 FARO Laser Scanner Focus 3D时,必须保持眼睛安全距 离。在眼睛安全距离以内操作的工作 人员必须佩戴激光护目镜。 未佩戴 激光护目镜的人员禁止进入此区域如 使用不当,可能会伤害眼 睛。
3.将 SD 存储卡插入扫描仪 1)打开 SD 存储卡插槽护盖。 2)插入 SD 卡,让带缺口的边缘朝 所示方向,直至发出“咔哒”声。 SD卡的侧边可能有保护锁开关。 请确保此保护锁开关处于打开状 态,以使SD卡可写入。 3)确认存储卡的方向。 如果您按错 误的方向强行插入存储卡,可能 会损坏 SD 卡、卡插槽或卡中的 数据。 4)关上护盖。
7. 开始扫描 如果在小于眼睛安全距离内,请立即戴上激光护目镜,并且 注意在有潜在危险的区域内是否没有其他人员(除非他们戴 了激光护目镜)。 请注意,扫描仪将会转动,成像单元将高速旋转。 确保扫 描仪可以自由移动,并且没有物体会触碰到成像单元。
单击操作软件主屏幕上 的开始扫描按钮,或按扫描 仪上的启动/停止按钮,开始 扫描。 扫描过程随即启动,激 光会打开。扫描仪会将捕捉 到的扫描数据存入SD卡。扫 描仪的 LED 会开始呈红色闪 烁,并在扫描仪的激光打开 期间一直保持此状态。
1. 安装三脚架 展开并锁定三脚 架的所有支脚。检查三 脚架的调节装置是否已 锁定,并且每个支架长 度相等。 确保表面平 稳,固定三脚架的支脚, 并且三脚架牢固地安装 在其位置上。
2. 将 FARO Laser Scanner Focus 3D安装到三脚架上 1)将快卸装置的底板连接到三脚架中 心螺孔。 确保拧紧该螺丝。 2)从装运箱中取出扫描仪 3)将扫描仪安放在快卸装置上,并拧 紧螺丝。试着轻轻从三脚架上抬起 扫描仪来测试其是否已被正确锁定 到位。
FARO三维激光扫描技术应用

Just some of FARO’s valued customers
全球性 – 无处不在
FARO Technologies • 成立于1982年 • 总部位于美国佛罗里达州 FARO Europe – Stuttgart, 德国 • 瑞士、德国等欧洲国家设有制 造工厂
Stuttgart, Germany 斯图加特,德国
360° x 305° 80 7千万 < 1 像素 动态范围拓展 自动修复,无人工干预 自动 是 2.2分钟 Scene 4.8软件
触摸屏
• 用户界面友好 • 电阻触摸屏 • 手指操作
• 分辨率 480 x 640
Start Screen开始界面
自动获取高质量的色彩信息
动态范围扩展技术(高动态光照渲染效果)
Focus3D三维扫描仪工作原理
Focus3D三维扫描仪性能表现
距离精度: 25m处+/- 2mm 线性精度 0.6 – 0.95 mm @ 90% refl. 1.2 – 2.2 mm @ 10% refl. 122.000 Hz – 976.000 Hz扫描速度 905 nm, 20mW, 3R级激光
FARO三维激光扫描技术应用
主要内容
• FARO 公司介绍 • FARO产品的特点 • FARO性能的表现 • FARO工程项目实例简介
公司背景和历史
1982年, Simon Raab先生和Greg Fraser先生创立了法如公司,这时正值他们在加拿大蒙特 利尔大学的PhD工作接近完成之时。 两年后,法如公司相继在1984年, 1986年和1988年投 放了他们在医学/外科领域里的三款代表法如公司精密的测量臂产品。 1990年,法如公司从蒙特利尔搬到佛罗里达的玛丽湖,随后不久,法如公司便开始应市发展 一个更广阔和更有力的为制造商提供质量控制的便携式的工具。 1994年,法如公司从医疗领域开始向全世界更广泛的工业制造业市场进军。 1997年,依托销售优势,利润的增长和完善服务体系,法如公司上市,在纳斯达克以代码 FARO进行股票交易。 1998年,2002年,2005年,2008年,法如公司分别取得四项技术成果,扩大了产品系列,扩 展了世界范围内的产品提供,以及把激光检测技术结合于产品中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
版本4.8 2011年1月©FARO Technologies Inc.,2011。
保留所有权利。
未经 FARO Technologies, Inc. 书面许可,禁止以任何形式或方式复制或转载本出版物的任何部分。
FARO Technologies Inc. 不做任何涉及 FAROARM、FARO LASER TRACKER 及其材料的任何明示或暗示的保证,包括但不限于适销性或适用于某特殊用途的任何隐含保证,而是仅在“按原样”的基础上提供此材料。
因购买或使用 FAROARM、FARO LASER TRACKER、FARO LASER SCANNER 或其材料引起相关的,或由此产生的特殊的、间接的、偶然的或继发性的损坏,FARO Technologies Inc. 对任何人概不负责。
无论以何种方式履行,FARO Technologies Inc. 的唯一赔偿责任不会超过本文所述材料的购买价格。
本手册所包含的信息如有更改,恕不另行通知,且不代表 FARO Technologies Inc. 的任何承诺。
客户接受本文档即表示认可在英文版与非英文版之间出现不一致时以英文版为准。
FARO Technologies Inc. 内部控制文件位置:X:\CONTROL\RECORDS\05MANUFA\PARTSPEC\7 Software\E932_SCENE_4.8_Manual_CN.pdf目录1. SCENE 简介 (9)1.1. 软件安装 (9)1.2. 许可 (9)1.3. 硬件和软件要求 (9)1.4. 操作 (9)2. 扫描 (11)3. 扫描和工作区 (12)3.1. 传输和导入 FARO Laser Scanner LS 和 Photon 扫描 (12)3.2. 传输和导入 FARO Laser Scanner Focus3D 扫描 (12)3.3. 工作区结构 (13)3.4. 使用扫描 (14)3.4.1. 加载扫描 (14)3.4.2. 显示扫描 (14)3.4.3. 卸载扫描 (16)3.4.4. 单个扫描点 (16)3.5. 文件结构 (16)4. 项目选择器 (18)4.1. 使用项目选择器 (18)4.1.1. 缺省项目位置 (18)4.2. 打开项目 (18)4.3. 过滤、排序、搜索 (19)4.4. 管理项目 (19)4.4.1. 添加现有项目 (19)4.4.2. 创建新项目 (20)4.4.3. 项目预览 (20)4.4.4. 收藏夹 (20)4.4.5. 忽略项目 (21)4.4.6. 编辑项目信息 (21)4.4.7. Google 地球视图 (22)4.5. 扫描仪管理 (22)4.6. 远程服务器连接 (22)4.7. 其他设置和信息 (22)4.7.1. 关闭项目选择器 (22)4.7.2. 缺省项目位置 (23)4.7.3. 要求 (23)5. 快速视图 (24)6. 平面视图 (25)7. 选择扫描点 (27)8. 为范围着色 (28)9. 处理扫描 (30)9.1. 过滤器 (30)9.1.1. 缺省过滤器 (31)9.1.2. 离群 (31)9.1.3. 基于距离 (32)9.1.4. 深色扫描点 (32)9.1.5. 平滑 (32)9.1.6. 预处理 (33)10. 导出扫描点 (35)10.1. 导出切片 (36)10.1.1. 单个切片 (36)10.1.2. 多个切片 (37)10.2. 断层成像 (37)10.3. DXF (38)10.4. VRML (39)10.5. IGES (39)10.6. XYZ 文本 (40)11. 对象 (41)11.1. 文本字段 (41)11.2. 文档对象 (41)11.3. 对象拟合 (43)11.3.1. 点 (44)11.3.2. 平面 (45)11.3.3. 板条 (48)11.3.4. 球体 (49)11.3.5. 管道 (50)11.3.6. 直线 (51)11.3.7. 矩形 (52)11.3.8. 网格 (52)11.3.9. 区域 (53)11.3.10. 对象标记工具 (53)11.4. 导出 (53)11.5. 导入 (54)11.6. 对象可视化 (56)11.7. 图层 (56)11.8. 图片 (58)12. 颜色 (60)12.1. 利用基于扫描仪的图片变成彩色 (60)12.1.1. 补偿水平偏移 (61)12.2. 利用其他图片变成彩色 (62)12.3. 颜色对比度过滤器 (65)13. 三维视图 (66)13.1. 三维视图中的对象 (67)14. SCENE WebShare (69)14.1. 创建 Web 项目 (69)14.1.1. 将元信息添加到 WebShare 项目中 (69)14.2. 查看 SCENE WebShare 项目 (69)14.2.1. 使用 SCENE (69)14.2.2. 使用 Internet 浏览器 (71)14.2.3. 检查 SCENE WebShare 项目 (71)15. 虚拟扫描 (76)16. 扫描分析 (79)16.1. 检查 (79)16.2. 测量距离 (79)16.3. 表面分析 (81)17. 注册扫描 (83)17.1. 创建扫描参考对象 (83)17.1.2. 手动创建 (84)17.2. 创建外部参考对象 (84)17.3. 查找对应参考对象 (85)17.3.1. 自动创建对应 (85)17.3.2. 手动创建对应 (87)17.3.3. 删除对应 (88)17.4. 自由注册 – 捆绑调整 (88)17.4.1. 在群集内注册扫描 (88)17.4.2. 多群集间注册 (90)17.4.3. 使用严格的成对注册 (92)17.5. 扫描管理器 (92)17.6. 高级注册功能 (96)17.6.1. 全部对齐 (96)17.6.2. 批注册 (97)17.6.3. 自由注册 (98)17.6.4. 使用已知位置进行注册 (99)17.6.5. 不使用倾角仪进行注册 (99)17.6.6. 手动注册 (99)17.7. 对应视图 (100)17.7.1. 调制器 (101)17.7.2. 对应线 (102)17.7.3. 更新 (102)17.7.4. 全部排除、全部包括和包括下一个 (103)17.7.5. 创建组和取消组 (103)17.7.6. 布置扫描 (103)18. 工作区 (104)18.1. 添加扫描 (104)18.1.1. 导入 (104)18.1.2. 复制 (104)18.2. 合并工作区 (104)19. FARO Focus3D 扫描仪管理 (106)19.1. 扫描仪管理的结构视图中的项 (106)19.1.1. 扫描仪快照 (106)19.1.2. SD 卡 (107)19.1.3. 项目 (107)19.2. 管理视图 (107)19.3. 管理快照 (107)19.3.1. 编辑插入的 SD 卡上的自动扫描仪快照 (107)19.3.2. 创建新的扫描仪快照 (107)19.3.3. 还原和编辑手动创建的扫描仪备份 (108)19.3.4. 还原自动扫描仪快照的本地副本 (109)19.3.5. 将新的、修改过的或还原的快照传输到扫描仪上 (109)19.4. 管理扫描项目 (110)19.5. 将固件更新传输到扫描仪上 (110)19.6. 扫描仪服务请求 (111)20. 参考手册 (112)20.1. 菜单栏 (112)20.1.1. 文件 (112)20.1.2. 编辑 (115)20.1.4. 工具 (116)20.1.5. DrawToCAD (125)20.1.6. 窗口 (125)20.1.7. 帮助 (126)20.1.8. 扫描仪 (127)20.2. 工具栏 (130)20.2.1. 标准工具栏 (130)20.2.2. 平面视图工具栏 (130)20.2.3. 点选择工具栏 (131)20.2.4. 测量工具栏 (131)20.2.5. 对象标记工具栏 (131)20.2.6. 三维视图工具栏 (131)20.2.7. 对应视图工具栏 (132)20.2.8. 扫描工具栏 (132)20.3. 上下文菜单 (133)20.3.1. 常用命令 (133)20.3.2. 拟合对象的命令 (134)20.3.3. 三维图片拟合(虚拟扫描的拟合) (134)20.3.4. 三维视图 (134)20.3.5. 三维视图 – 选择的区域 (139)20.3.6. 约束对象 (139)20.3.7. 约束平面拟合 (139)20.3.8. 直线拟合 (139)20.3.9. 图片 (140)20.3.10. 管道 (140)20.3.11. 管道拟合 (140)20.3.12. 平面视图和快速视图 (140)20.3.13. 平面视图或快速视图中的扫描点选择 (142)20.3.14. 平面 (143)20.3.15. 扩展的平面 (144)20.3.16. 平面拟合 (144)20.3.17. 板条 (144)20.3.18. 板条拟合 (144)20.3.19. 点 (145)20.3.20. 点拟合 (145)20.3.21. 球体 (145)20.3.22. 球体拟合 (145)20.3.23. 管道 (145)20.3.24. 管道拟合 (145)20.3.25. 矩形 (145)20.3.26. 矩形拟合 (145)20.3.27. 区域 (145)20.3.28. 扫描 (146)20.3.29. 扫描拟合 (148)20.3.30. 扫描文件夹 (148)20.3.31. 扫描管理器 (151)20.3.32. 虚拟扫描(三维图片) (152)20.3.33. 工作区 (153)20.3.34. 快照(Focus3D 扫描仪管理) (154)20.4.1. 复选标记 (154)20.4.2. 常用属性 (155)20.4.3. 三维图片拟合 (156)20.4.4. 约束对象 (157)20.4.5. 约束平面拟合 (158)20.4.6. 测量值 (159)20.4.7. 对象标记 (159)20.4.8. 图片 (160)20.4.9. 管道 (160)20.4.10. 管道拟合 (161)20.4.11. 平面 (161)20.4.12. 平面拟合 (162)20.4.13. 板条 (163)20.4.14. 板条拟合 (164)20.4.15. 点 (164)20.4.16. 点拟合 (165)20.4.17. 球体 (165)20.4.18. 球体拟合 (166)20.4.19. 文本 (166)20.4.20. 文档对象 (167)20.4.21. 虚拟扫描(三维图片) (167)20.4.22. 扫描拟合 (168)20.4.23. 扫描文件夹 (170)20.4.24. 扫描管理器 (171)20.4.25. 拉 (173)20.4.26. 推 (174)20.4.27. 扫描 (174)21. DrawToCAD (183)21.1. 安装 (183)21.2. 使用 FARO DrawToCAD (183)22. 坐标 (185)22.1. 本地坐标 (185)22.1.1. 极坐标 (185)22.1.2. 直角坐标 (185)22.2. 总体坐标 (186)22.2.1. 坐标变形 (186)22.2.2. 扫描的坐标变形 (188)22.2.3. 变形和注册 (189)23. 文件格式 (190)23.1. 测量数据 .csv (190)23.2. 常规扫描数据格式 .xyz (190)23.3. 二进制扫描数据格式 .xyzb (190)23.4. 扫描数据格式 .ptc (190)23.5. 扫描数据格式 .ptx (190)23.6. 扫描数据格式 .ptz (191)23.7. 扫描数据格式 .zfc (192)23.8. IGES (192)24. 错误消息 (193)25. 常见问题 (194)26.1. paintlib (195)26.2. libtiff (195)26.3. JPEG (195)26.4. KissFFT (195)26.5. 打开源计算机视觉库 (195)27. 软件许可协议 (197)28. 词汇表 (198)1.SCENE 简介1.1.软件安装插入与扫描仪一起提供的安装 CD,选择产品,然后遵循屏幕上的安装说明进行操作。