转子不对中问题new2
动平衡知识

任何转子在围绕其轴线旋转时,由于相对于轴线的质量分布不均匀而产生离心力。
这种不平衡离心力作用在转子轴承上会引起振动,产生噪声和加速轴承磨损,以致严重影响产品的性能和寿命。
电机转子、机床主轴、内燃机曲轴、汽轮机转子、陀螺转子和钟表摆轮等旋转零部件在制造过程中,都需要经过平衡才能平稳正常地运转。
根据平衡机测出的数据对转子的不平衡量进行校正,可改善转子相对于轴线的质量分布,使转子旋转时产生的振动或作用于轴承上的振动力减少到允许的范围之内。
因此,平衡机是减小振动、改善性能和提高质量的必不可少的设备。
通常,转子的平衡包括不平衡量的测量和校正两个步骤,平衡机主要用于不平衡量的测量,而不平衡量的校正则往往借助于钻床、铣床和点焊机等其他辅助设备,或用手工方法完成。
有些平衡机已将校正装置做成为平衡机的一个部分。
重力式平衡机和离心力式平衡机是两类典型的平衡机。
重力式平衡机一般称为静平衡机。
它是依赖转子自身的重力作用来测量静不平衡的。
如图,置于两根水平导轨上的转子如有不平衡量,则它对轴线的重力矩使转子在导轨上滚动,直至这个不平衡量处于最低位置时才静止。
被平衡的转子放在用静压轴承支承的支座上,在支座的下面嵌装一片反射镜。
当转子不存在不平衡量时,由光源射出的光束经此反射镜反射后,投射在不平衡量指示器的极坐标原点。
如果转子存在不平衡量,则转子支座在不平衡量的重力矩作用下发生倾斜,支座下的反射镜也随之倾斜并使反射出的光束偏转,这样光束投在极坐标指示器上的光点便离开原点。
根据这个光点偏转的坐标位置,可以得到不平衡量的大小和位置。
重力式平衡机仅适用于某些平衡要求不高的盘状零件。
对于平衡要求高的转子,一般采用离心式单面或双面平衡机。
离心式平衡机是在转子旋转的状态下,根据转子不平衡引起的支承振动,或作用于支承的振动力来测量不平衡。
其按校正平面数量的不同,可分为单面平衡机和双面平衡机。
单面平衡机只能测量一个平面上的不平衡(静不平衡),它虽然是在转子旋转时进行测量,但仍属于静平衡机。
基于LabVIEW的轴心轨迹故障自动识别系统

基于LabVIEW的轴心轨迹故障自动识别系统刘其洪;叶聪;李伟光;万好;乔于格【摘要】针对目前旋转机械故障诊断的计算量大、识别准确度不高、自动化程度低等问题,提出一种基于LabVIEW的轴心轨迹故障自动识别的新方法.对比小波与传统去噪算法,选用效果更优的小波提纯仿真轴心轨迹.通过改进的HU不变矩函数提取轴心轨迹的特征值,保证比例缩放不变性.两路相互垂直的位移传感器连接西门子LMS采集振动信号,结合关联度算法,在LabVIEW轴心轨迹故障自动识别系统上进行转子不对中故障测试,识别的结果与外8字轴心轨迹关联度高达97%,同时信号的Matlab时域轴心轨迹图为外8字,信号频谱图主要为一倍频和二倍频,均符合转子不对中故障特征.结果表明:该系统能够进行在线故障识别,为旋转机械的智能故障诊断提供参考依据.%For the problems of large computational quantity, low recognition precision and low automatization of rotating machinery fault diagnosis, a new method of automatic recognition system for shaft orbit faults based on LabVIEW is proposed. The wavelet and traditional denoising algorithms are compared and the shaft orbit simulation with wavelet purification of better effects is selected. The characteristic value of the shaft orbit is extracted by the improved HU invariant-moment function to ensure the invariance of scaling. Two mutually vertical displacement sensors are connected with Siemens LMS to acquire vibration signals. With the correlation degree algorithm, fault test is conducted for the automatic recognition system for shaft orbit faults based on LabVIEW. The results show that the correlation between the recognized results and the external 8-character shaft orbit reaches as high as 97%. Meanwhile, the signal'sMatlab time domain shaft orbit is external 8-character and the signal frequency spectrum is mainly of one time frequency and doubled frequency, fully according with the fault characteristic of rotor misalignment. The results show that the system can recognize the faults on line and it provides a reference for intelligent fault diagnosis of rotating machinery.【期刊名称】《中国测试》【年(卷),期】2018(044)004【总页数】6页(P69-74)【关键词】LabVIEW系统;轴心轨迹;关联度;故障诊断;Matlab【作者】刘其洪;叶聪;李伟光;万好;乔于格【作者单位】华南理工大学机械与汽车工程学院,广东广州510640;华南理工大学机械与汽车工程学院,广东广州510640;华南理工大学机械与汽车工程学院,广东广州510640;华南理工大学机械与汽车工程学院,广东广州510640;华南理工大学机械与汽车工程学院,广东广州510640【正文语种】中文0 引言对于大型旋转机械,由于现场工作环境的复杂性,以及通常需要在高速重载工况下连续运行,不可避免会出现振动,一旦振幅过大,极有可能造成机械系统运行不稳定,严重时会引起机械故障或停机,甚至会对现场工作人员的人身安全造成威胁,引发安全事故[1]。
制冷压缩机三相电流不平衡分析与仿真
制冷压缩机三相电流不平衡分析与仿真摘要:进入21世纪以来,随着我国经济的飞速发展以及社会主义现代化建设的逐步完善,企业及社会群体对对空调的需求数量逐年递增,空调产业得到了前所未有的发展,空调的压缩机三相电流不平衡问题时有发生。
文章分析了制冷式压缩机三相电流不平衡的若干因素,并通过对应的仿真模型计算,验证三相电流不平衡。
为分析和解决实际问题提供一种新的思路和方案。
三相电流是否平衡是反映电机运行有无异常的重要参考依据;电机三相电流不平衡程度过大(要求≤10%)将使电机损耗增加、温升升高、噪声振动增大、效率降低、电机使用寿命下降,同时还会影响电源质量、增大线路损耗等。
关键词:压缩机; 电机; 电流; 绝缘耐压;不平衡Absrtact: Since the 21st century, with the rapid development of China's economy and the gradual improvement of socialist modernization, the demand for air conditioners by enterprises and social groups has increased year by year, and the air conditioning industry has achieved unprecedented development. The three-phase current imbalance problemof air conditioner compressors has occurred from time to time. This paper analyzes some factors of three-phase current imbalance of refrigeration compressor, and verifies the three-phase current imbalance through corresponding simulation model calculation. It provides a new idea and scheme for analyzing and solving practical problems.Whether the three-phase current is balanced is an important reference to reflect whether the motor runs abnormally; Excessive unbalance of three-phase current of motor (required to be less than 10%) will increase motor loss, temperature rise, noise and vibration,reduce efficiency and service life of motor, and will also affectpower quality and increase line loss.Keywords: compressor; Motor; Current; Insulation withstand voltage; imbalance一、三相电压不平衡当电源电压三相不平衡时,电机内将出现逆序电流和逆序磁场,使之产生较大的逆序转矩,造成电机三相电流分配不平衡,使某相电流增大;仿真分析及前人大量试验表明,当三相电压不平衡率达到5%时,可使电机三相电流不平衡率超过20%(详见仿真分析);引起三相电压不平衡的主要原因有:1) 变压器三相绕组中某相发生异常,输出不对称电压;2)输电线路过长或导线截面大小不均匀,导致三相线路的阻抗压降不同,造成各相电压不平衡;3)动力、照明等混合共用,其中单相负载多集中于某一相或两相,造成三相用电负载分布不均,使供电电压、电流不平衡。
熟料烧成控制中菲斯特转子秤常见故障分析
中图分类号:TQ 72.6 4.2 文献标识码:B 文章编号: 008-0473(20 8)04-0032-03 DOI编码: 0. 6008/ki. 008-0473.20 8.04.007熟料烧成控制中菲斯特转子秤常见故障分析杨洪伟 琚瑞喜登封市嵩基水泥有限公司,河南 登封 452478摘 要 菲斯特转子秤常常发生或设备或工艺或电气控制故障,给生产带来影响。
转子秤窜风、煤粉水分大、膜片堵塞都会引起转子秤蓬仓。
引起转子秤窜风蓬仓的原因很多,比如送煤风压过高,收尘管道堵塞,转子与模板间隙忽大忽小等等。
秤底部测速盘失圆会引起转子秤运行波动。
煤粉积存电器元件发热,锁秤螺栓掉落,转子秤会出现“转子故障”信号跳停。
关键词 转子秤 窜风 蓬仓 测速盘 波动 跳停0 引言在预分解窑熟料生产线上,常能见到用于煤粉计量的菲斯特转子秤。
在使用过程中,菲斯特转子秤常常发生或设备或工艺或电气控制故障,给生产带来影响。
在我公司,菲斯特转子秤多次发生煤粉蓬仓、运行波动和故障跳停,在处理过程中积累了一些经验,笔者在此予以总结分享。
1 转子秤蓬仓转子秤窜风、煤粉水分大、膜片堵塞都会引起转子秤蓬仓。
1.1 转子秤窜风蓬仓转子秤窜风蓬仓一般指喂料风从转子上部间隙中向下料管内窜风,在下料管出口处形成气囊,阻碍煤粉向下流动而蓬仓。
蓬仓的危害就是引起煤粉喂入波动,甚至间歇性断料。
引起转子秤窜风蓬仓的原因很多,比如送煤风压过高,收尘管道堵塞,转子与模板间隙忽大忽小等等。
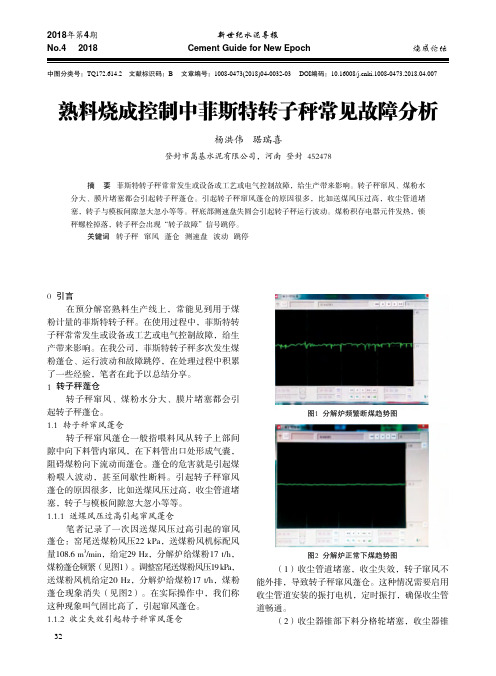
1.1.1 送煤风压过高引起窜风蓬仓笔者记录了一次因送煤风压过高引起的窜风蓬仓:窑尾送煤粉风压22 kPa,送煤粉风机标配风量108.6 m3/min,给定29 Hz,分解炉给煤粉17 t/h,煤粉蓬仓频繁(见图1)。
调整窑尾送煤粉风压19 kPa,送煤粉风机给定20 Hz,分解炉给煤粉17 t/h,煤粉蓬仓现象消失(见图2)。
在实际操作中,我们称这种现象叫气固比高了,引起窜风蓬仓。
转子产生不平衡的原因

转子产生不平衡的原因
转子不平衡是由于转子部件质量偏心或转子部件出现缺损造成
的故障。
造成转子不平衡的具体原因很多,按发生不平衡的过程可分为原始不平衡、渐发性不平衡和突发性不平衡等几种情况。
原始不平衡是由于转子制造误差、装配误差以及材质不均匀等原因造成的,如出厂时动平衡没有达到平衡精度要求,在投用之初,便会产生较大的振动。
渐发性不平衡是由于转子上不均匀结垢,介质中粉尘的不均匀沉积,介质中颗粒对叶片及叶轮的不均匀磨损以及工作介质对转子的磨蚀
等因素造成的。
控制电机与应用复习题2new

1、自动控制系统对伺服电动机的基本要求是什么?P8㈠宽广的调速范围。
伺服电动机的转速随着控制电压的改变能在宽广的范围内连续调节。
㈡机械特性和调节特性均为线性。
伺服电动机的机械特性是指控制电压一定时,转速随转矩的变化关系;调节特性是指电机转矩一定时,转速随控制电压的变化关系。
线性的机械特性和调节特性有利于提高自动控制系统的动态精度。
㈢无“自转”现象。
伺服电动机在控制电压为零时能立即自行停转。
㈣快速响应。
电机的机电时间常数要小,相应地伺服电动机要有较大的堵转转矩和较小的转动惯量。
这样,电机的转速便能随着控制电压的改变而迅速变化。
2、直流伺服电动机电枢控制时始动电压是什么?与负载转矩大小有什么关系?P12调节特性曲线与横轴的交点,就表示在某一电磁转矩(若略去电动机的空载损耗,则为负载转矩值)时电动机的始动电压。
若转矩一定时,电机的控制电压大于相应的始动电压,电动机便能启动并达到某一转速;反之,控制电压小于相应的始动电压,则这时电动机所能产生的最大电磁转矩仍小于所要求的转矩值,就不能起动。
3、直流伺服电动机有哪两种过渡过程?产生的原因是什么?影响机械时间常数大小的因素有哪些?P12,P15若电动机在电枢外施控制电压前处于停转状态。
则当电枢外施阶跃电压后,由于电枢绕组有电感,电枢电流Ia不能突然增长,因此有一个电气过渡过程,相应电磁转矩Tem的增长也有一个过程。
在电磁转矩的作用下,电机从停转状态逐渐加速,由于电枢有一定的转动惯量,电机的转速从零增长到稳定转速又需要一定的时间,因而还有一个机械过渡过程。
影响机械时间常数大小的因素有①它与电机电枢的转动惯量J的大小成正比②它与电机的每级气隙磁通Φ的平方成反比③它与电枢电阻Ra的大小成正比。
4、两相伺服电动机的控制方式有几种?说明控制方法。
P251)幅值控制:这种控制方式是通过调节控制电压的大小来改变电机的转速,而控制电压与励磁电压之间的相位角始终保持90度电角度。
转子秤下煤不稳的原因与解决措施
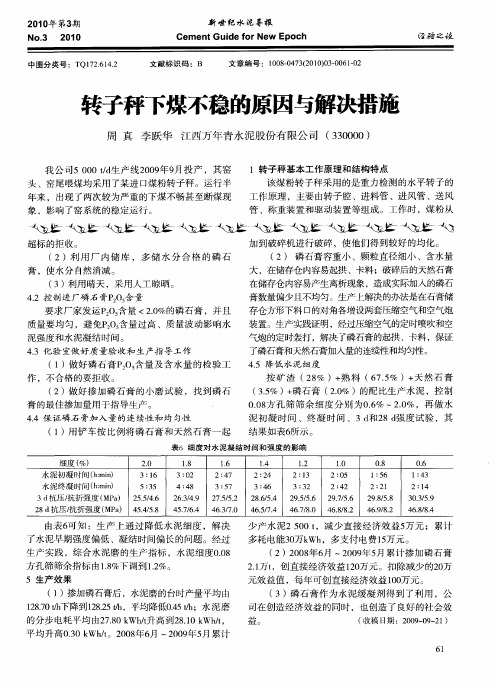
要 求 厂家 发运 P,0 含 量 <2.O%的磷 石 膏 ,并 且 存仓方形下料 口的对 角各增设两套压缩空气 和空气炮
质量 要均 匀 ,避免 P,0 含量 过 高 、质量 波 动影 响水 装置 。生产实践证 明 ,经过压缩空气 的定 时喷吹 和空
泥强度 和水 泥凝 结时 间 。
气炮 的定 时轰打 ,解决 了磷石膏 的起拱 、卡料 ,保证
少 产 水 泥2 500 t,减 少 直接 经 济效 益 5万 元 ;累计
多 耗 电能30万 kwh,多 支付 电费 15万元 。
(2)2008年 6月 ~2009年5月 累计 掺 加磷 石 膏
2.1万t,创直 接经 济效 益 120万元 。扣 除减 少 的20万
元效 益值 ,每 年 可创直 接经 济效 益 100万元 。
工作原 理 ,主要 由转 子腔 、进 料管 、进 风管 、送 风 管 、称 重装 置 和驱 动装置 等组 成 。工作 时 ,煤粉从
:=I j::¨ 通j{r 厂
一 j:≥ j=} :=I 土}
超标 的拒 收 。
加 到破 碎机 进行 破碎 ,使 他们得 到 较好 的均化 。
(2)利 用 厂 内 储 库 ,多 储 水 分 合 格 的 磷 石
我公 司5 000 t/d生 产 线 2009年 9月 投 产 ,其 窑 头 、窑尾 喂煤 均采用 了某 进 口煤粉 转子 秤 。运行半 年来 ,出现 了两次较 为严 重 的下煤 不畅 甚至 断煤 现 象 ,影 响了窑 系统 的稳定 运行 。
1转 子秤 基本 工作原 理和 结构 特点 该 煤 粉转 子秤 采用 的是 重力 检测 的水 平转 子 的
满 转子 的相应 部位并 被称 重 ,同时根据 设定 流量 调 控 制 值 相 距 甚 远 。 由于煤 粉 湿 度 大 ,细 度 细 ,煤
奥的斯故障代码全
奥的斯故障代码全000?POWER?ON:驱动器供电正常。
?001?NEW?RUN:重新初始化运⾏。
?002?GO?TO?SLEEP:?变频器进⼊节能模式。
?003?STACK?WARN:?软件中堆找超出允许范围。
?004?POWER?DOWN:记录⼀个断点信号,即拉闸。
?005?EXTERN?FLASH:?GDCB的FLASH内存记录失败。
?006?EXTERN?RAM:?GDCB的RAM内存记录失败。
?007?OMU?PRESENT:?表明OMU已插在变频器的相应接⼝上可以正常使⽤。
?008?OMU?PROHIBIT:?检修模式下OMU的软件升级被禁⽌,?TT参数OMU?PROHIBITED来查看。
? 009?MANUAL? MODE:?变频器在⼿动模式下。
010B_MODE:变频器在电池模式下。
?011?EXTERN?FRAM:?FRAM通讯正常。
?100?INV?SW?OCT:?101?INV?I?IMBAL102?INV?ID?ERROR,103?INV?IQ?ERROR:?载时的5%。
?107?INV?GATE?FLT:?检测到IGBT108?INV?HW?OCT:?检门电路电压故障。
?30%。
?5%。
?器内,同时也是暗⽰直流侧电容可能已失效。
?209?DC?LINK?OCT:表明直流电流过⼤210?CNV?IPM?FLT:?逆变器智能电源模块已检测到⼀个故障。
?300?DC?BUS?OVER:?直流电压超出750V的108%,即810V。
301DCBUSUNDER:直流电压低于下极限值。
302VACOVER:交流电压超出上极限值。
?303?VAC?UNDER:?交流电压低于下极限值。
?304?VAC?IMBAL:?交流相电压输⼊相差超过10%.?305?PLL?UNLOCK:?处于相锁定循环的交流相电压已解锁,通常发⽣在你试图运⾏⼀个IGBT已损坏的变频器。
? 306?SINGLE?PHASE:?表明变频器处于单相模式并且T相接在⼀稳定的输⼊电压上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BPdM
BPdM
不对中的一般特征( 不对中的一般特征(一)
1.不对中有时轴向方向振动并不大,虽然不对中传统地归类为具有 大的轴向方向振动,但是并不总是这样。虽然轴向方向振动值只是 径向方向振动的四分之一,仍是不对中问题,此时机器的不对中是 平行不对中占优势。 2.水平方向和垂直方向振动幅值的比较,因为有时机器水平方向对 中良好而垂直方向对中不良,则十分可能不对中的机器,在某径向 方向的振动比另一方向大得多。 3. 2×转速频率振动 不对中经常会产生大于正常值的2×转速频率振动,它不仅作 用在轴向方向,还作用在径向方向。其原因是机器其支承或联轴器 的不对称的刚性引起机器转速频率的二次谐波频率的振动。即,在 支承座、框架,基础或联轴器本身经常存在不同的刚性,这就使机 器每转一转产生前后运动,因而导致2×转速频率的振动。
在联轴器两侧的轴承座的水平,垂直和轴向方向测量相位,相位差接 近180度(±40到50度),不对中程度越严重,越接近180度相位差。同 样,诸如不平衡,偏心距,共振等其他故障不明显时,越接近180度 相位差。 在比较同一转子的两个轴承座水平方向相位差与垂直方向相位差时, 约百分之九十的不对中机器将表现垂直方向相位差与水平方向相位差 之间的差值接近18O度。例如,如果外侧轴承与内侧轴承之间水平方 向相位差约为30度,大多数不对中转子的垂直方向相位差为约210度 不平衡的转子不会表现这种相位差特性,因为不平衡的转子,水平方 向出现的相位差非常接近垂直方向相位差。
BPdM
BPdM
特征频率 常伴频率
转子不对中特征分析表
转子不对中特征表
振动稳定性 振动方向 相位特征 轴心轨迹 进动方向 矢量区域
2X
1X、3X
稳定
径向、轴向
较稳定
双环椭圆
正进动
不变
转子不对中的敏感参数
振 动 随 转速 变化 振动随油温 变化 振动随流量 变化 振动随压力 变化 振动随负荷变化 其它识别方法 转子轴向振动较大;联轴器相邻 轴承处振动较大;随机器负 荷增加,振动增大;对环境 温度变化敏感。
BPdM
旋转机械不对中的概念
内部不对中:轴承、级间隔板、轴封间存在的不对中。 外部不对中:机器间的不对中。 柔性联轴器可以补偿一定量的不对中量,这个可以补偿的不对中量, 取决于所使用的柔性联轴器的类型,如果不对中量超过了联轴器的允许的 可补偿的能力,这个机器就存在了不对中问题,齿轮联轴器的有最大的不 对中补偿能力。
状态监测与预测维修
转子不对中问题
BPdM
北京普迪美科技有限公司
BPdM
旋转机械不对中的概念
旋转机器多数是由多个转子和轴承组成的一个机械系统,转子与转子之间 用联轴器连接,转子本身由轴承支撑。 转子不对中: 转子不对中:是由于机器的安装误差,承载后的变形及基础的沉降不均等, 造成机器工作状态时转子与转子轴线之间产生轴线平行位移,轴线角度位移 或综合位移等对中变化误差。 轴承不对中: 轴承不对中:是由于一个转子两端轴承安装歪斜、轴承磨损等影响导致两轴 承中心线不在同一直线上,进一步导致整个转子系统的对中不好。 联轴器不对中:是连接两转子的两个半联轴器的旋转中心偏心,或两中心线 联轴器不对中: 相交成一定角度,机器基础沉降、变形,转子弯曲,初始安装对中超差,轴 承热膨胀不均等都可能引起联轴器不对中。 转子不对中、轴承不对中应该是一个概念,联轴器不对中是转子不对中 的表现,设备安装时要对联轴器的对中状态进行检查,确定联轴器连接的两 个转子是否对中;轴承不对中有时会影响转子和转子之间的对中,而机械不 对中包括上面提到的所有这些对中问题。 不对中问题可以发生在机器内部的若干位置上,也可以发生在两轴承之 间的轴线上,也可以发生在相互啮合的齿轮上,也可发生在相互驱动的皮速 轮上,但更多的是发生在需要偶合在一起的两台机的连接上。
BPdM
BPdM
角向不对中
1.角向不对中主要产生大的轴向方向振动,尤其是1X和2X转速频率。 2. 然而,假定存在大的振动前提下,振动是轴向方向2X转速频率或3X 转速频率,其幅值约是1X转数频率幅值的30%到50%时,说明是角向 不对中。 3.如下图所示,联轴器两侧的轴向方向相位变化约为180度,是最好的 检测角向不对中的指示。如果一侧的每个轴承都向一个方向移动,另 一侧的轴承向相反方向移动,则是角向不对中的可能性较大。
BPdM
不对中问题的危害及特征(一) 不对中问题的危害及特征(
1.由于不对中造成机器零部件损坏 不对中会引起联轴器损坏,还会损坏其他机器部件。如会对轴承 施加过大的力,而引起轴承过早损坏。同样会起引起包括齿轮,皮带, 皮带轮,叶片等其它机器零部件有害的影响。 2.引起对自由端(或外侧)的作用 由于不对中从联轴器引入的力可能足够强大,其作用不仅是在最 靠近联轴器的轴承上,同样也作用在机器的自由端或外侧端。 3.引起2X转速频率振动 不对中经常会产生大于正常值的2X转速频率振动,它不仅作用在 轴向方向,还作用在径向方向。2X转速频率分量是最好的不对中指示 4.引起轴向方向振动 不对中也许是大的轴向方向振动的最常见的原因,当然还有若干其 它来源也可产生轴向方向振动,它们包括:
BPdM
BPdM
不对中问题的危害( 不对中问题的危害(五)
诱发油膜失稳产生自激振动,转子的振动大小与轴承的刚度有关, 而轴承的动刚度是偏心率的函数,因为不对中引起负载转移,当转子上 某一轴承上的负荷较轻时,此轴承处的转子偏心率就会就较低,因为此 处的转子的支承刚度减小,这时转子就会产生较大的轴振动,当转子的 偏心率减小到一定程度时,此时转子处于不稳定状态,在外界干扰力作 用下,轴承就会突然转变成全周润滑状态,产生油膜涡动问题。
BPdM
BPdM
平行不对中
1. 平行不对中主要影响径向振动,而角向不对中主要影响轴向振动。 2. 象角向不对中故障那样,平行不对中使联轴器两侧的相位差也接近180 度,但是这是在径向方向上(水平的或垂直方向)。 3.振动频谱中2X转速频率幅值超过1X转速频率幅值的50%时,常常说明 是径向不对中,但是2X转速频率值相对于1X转速频率幅值的高度常取决 于联轴器的类型和结构。2X转速频率幅值接近1X转速频率幅值是常见的, 尤其是平行不对中严重时。 4.当角向不对中或平行不对中变得严重时,每种不对中都产生一组谐波, 谐波的范围包括4次到5次谐波。这种情况下,严重不对中的振动频谱可 能呈现为机械松动的振动频谱样子。
BPdM
BPdM
不对中问题的危害( 不对中问题的危害(三)
5.载荷在各轴承上发生转移 当不对中程度超过联轴器的允许补偿能力时,会引起轴弯曲,并发生 轴承载荷的转移,由此会造成某一轴承的过负荷。
BPdM
BPdM
不对中问题的危害( 不对中问题的危害(四)
不对中程度严重时会引起滑动轴承中金属与金属间的接触,引 起轴瓦钨金擦伤。
BPdM
BPdM
轴承不对中
当滑动轴承或滚动承轴不对中或者卡死在轴上时,可引起较大的振动 和异常负载。通过找对中无法消除振动,只有卸下轴承重新安装。 不对中轴承的特征: 1.卡住的轴承通常产生明显的轴向振动,它可能不仅影响1X转速频 率振动,同时也影响2X转速频率振动。 2.如果在如下图所示,在彼此间隔90度的4个点上,测量轴向方向相 位,如果上下或左右的相位差约为180度,则说明是轴承卡死中轴上。
BPdM
BPdM
不对中的一般特征( 不对中的一般特征(二)
4.引起较高次谐波 不对中还可能引起大量的高次谐波,使振动频谱呈现为像松 动或间隙过大的故障。关键的区别特征仍然是轴向方向2X转速频 率较大幅值的振动。 5.相位是不对中的最佳指示 虽然同样存在1X转速频率与2X转速频率的振动,但不对中时 的相位特点是:
BPdM
BPdM
有关不对中问题的其它观点
• 当有不对中问题存在时,在频谱图上会出现三阶转频的谐频振动, 如果联轴器出现不对中,也会出现转频的三次谐频振动,如果齿轮 出现不对中,在频谱图上会出现齿轮啮合频率的三次谐频,由于这 个原因,对电机及汽轮机等驱动设备在联接到被驱动设备之前,单 独试运行采集振动数据。 • 如果想要了解不对中的类型,需要在驱动和被驱动设备的输入及输 出端的水平,垂直和轴向采集数据,如果在如下位置发现存在显著 的转频的三次谐频振动则: 水平方向,那么在垂直方向存在不对中偏移量。 垂直方向,那么在水平方向存在不对中偏移量。 轴向方向,那么存在角向不对中问题。 所有方向,那么存在水平,垂直不对中偏移量和角度不对中。 • 如果存在显著的三倍转频的谐频振动,那么就说明存在不对中问题, 在指定的刻度范围内,不管幅值有多大。
BPdM
BPdM
不对中问题的危害( 不对中问题的危害(二)
可产生轴向方向振动原因: a.弯曲的轴: b.处于共振回转的轴; c. 卡住在轴上的不对中的轴承(见第四章,第三节); d. 轴向方向某些机器零部件共振; e. 推力轴承磨损; f. 磨损的螺旋齿轮或斜齿轮; g. 装滑动轴承的电动机相对于其磁力中心摆动; h. 联轴器的零部件不对中; 因此,当出现大的轴向方向振动时,不要很快草率地得出故障 就是不对中的结论。而是,应该特别分析振动相位信息,然后分析 振动频谱。
内部不对中
外部不对中
BPdM
不对中问题
不对中的问题是引入大的振动导致昂贵的机器部件的过早损坏和增大 对能耗的要求。不对中现在也许是轴承故障的主要原因。 不对中问题的种类:
BPdM
BPdM
不对中问题
BPdM
BPdM
不对中问题
不对中问题是三维空间问题
BPdM
BPdM
不对中产生的原因
1. 冷态找正,热态工作中心发生变化 2. 随负荷的变化机器的温度随之变化,中心发生了变化。 3. 基础问题引起中心变化(过程缓慢) 混凝土开裂 底板松动 地脚螺栓松动 混凝土基础被润滑油浸泡 4. 管道做用力,管道作用力来源于: 管道支吊架松动 管道支吊架变形 管道支吊架断裂 管道支架失去支撑 5. 存在软地脚 6. 软地脚是多个地脚,当地脚螺栓紧固完毕后不共面,当存在一个软地脚时,紧固这个 地脚螺栓时,将会引起机器产生偏移或变形。 7. 软地脚产生的原因: 没有垫平机器 加垫了过多的垫片(在一个地脚下最多不能垫4个以上的垫片) 底板弯曲或变形 底板的安装不合适 地脚和底板的接触不好 机器的地脚与底板不平行 机器壳体本身存在变形 BPdM