实验四——基于超声波传感器的盲人行走探测器
基于单片机技术的超声波测距盲杖的设计
基于单片机技术的超声波测距盲杖的设计摘要:超声波测距盲杖是一种盲人助行工具,可以提供距离信息,帮助盲人行走。
本文介绍了超声波测距盲杖的系统组成和工作原理,并设计了测距模块、语音提示模块、蓝牙连接模块。
其中超声波测距模块和语音提示模块是本设计的重点。
本系统采用51单片机作为主控芯片,利用超声波测距原理和语音提示功能,实现了盲人在行走过程中的实时距离监测、障碍物检测、安全警报等功能,具有成本低、体积小、可靠性高等特点。
测试结果表明,本系统测量数据准确、可靠性高、可重复性强,能够满足盲人使用需求。
关键词:超声波测距单片机语音提示1.引言根据新思界产业研究中心发布的《2021-2025年全球盲人智能助视器行业深度市场调研及重点区域研究报告》显示,在全球中,中国是盲人数量最多的国家,在2020年盲人数量约为830万人,占全球失明人口的21%左右。
而短短两年——2022年4月23日,中国盲人协会转载的人民日报发布的《喜马拉雅助力中国盲人协会,共同孵化盲人音频主播》中显示,中国约有1731万盲人,每年因盲人在日常生活中的障碍而导致的事故达10万起,由于没有必要的无障碍设施,这些盲人无法正常的出行。
因此,研究一种能够辅助盲人安全出行的工具非常有必要。
目前市面上已有很多种类的助行工具,如手杖、盲杖、导盲犬等。
但这些助行工具均存在一些不足,如价格昂贵、携带不便、使用时间短等。
基于以上因素,本文主要研究一种基于单片机开发的超声波测距盲杖。
超声波测距是一种非接触式测量方法,具有精度高、响应速度快、抗电磁干扰等优点。
利用超声波测距原理可以实现对障碍物距离的测量。
超声波测距目前在医疗上使用比较广泛。
超声波测距系统主要是利用超声波在介质中传播时遇到障碍物反射回来的时间来计算距离。
本项目在设计上主要考虑以下几点:一是采用单片机作为控制核心,利用超声波测距原理实现对障碍物距离的测量;二是通过语音提示功能实现对障碍物距离进行播报;三是设计蓝牙模块可以发送超声波所测得的距离。
基于超声波测距仪的导盲仪设计
数量 1
单价(元) 总价(元)
40
40
六非门
1
2
2
单路运算放 1
2
2
大器
线性稳压器 1
2
2
超声波发射/ 1(对)
15
15
接收头
1
3
3
供电
1
4
4
电阻、电容 共计
若干
5
73
主 程 序 流 程 图
初始化
直流测量是 否结束
N
Y
;
记录直流分量 报警数据处理
报警逻辑处理
回波检测开始
N
是否超时
Y
回波检测
是否收到回波
Y
报警数据为阈值检测结果
N
N
上次是否收到回波_ Y
报警数据为峰值检测结果
是否超时time
Y
;
关报警
N
为阈值检测结果
测 距 报 警 程 序 流 程 图
相应技术指标
时间/ms 4 6.9 8.4 10 14 18.2
峰峰值(平均)/V 2.38 2.02 1.38 1.24 0.82 0.5
利用WolframAlpha进行回归分析有
多径问题
多径问题
多径问题
串扰问题的改善
经过观察和测 量,可知串扰 波形大约持续 4ms,峰峰值 为2.04V
当障碍出现在串扰区域中可知,障碍物的回波峰峰值可达2.6V, 超过串扰峰峰值,因此可使用回波峰峰值和串扰峰峰值之间的某 值作为串扰时间内的阈值,可极大地减小盲区。实际采用了2.2V, 可将盲区缩减至几毫米。
系统向测量目标发射超声波脉冲然后接收相应的反射 波。MSP430 集成的模拟比较器A 用于检测到达系统 的回声。超声波脉冲从系统到目标然后反射回系统所 需的时间可以由MSP430精确的测量。
基于超声波测距的盲人路况提醒器设计
• 3.系统软件设计方面:
–项目成员已修学科基础选修课《C语言程序设计》,对单片机 编程语言有一定的基础。
7.成员分工
· 硬件电路设计主要由赖文彬、喻再军、陈永雯负责,其中超声波接收 电路的设计由赖文彬主要完成,超声波发射电路的设计由喻再军、陈 永雯主要完成。
· 软件程序设计主要由刘春奎、蒋金童负责,其中测温子程序和测距
开始
5.系统软件设计
数
计算距离 语音播报
系统软件主要完成超声 波的产生、计时、计算, 以及结果显示和语音播报 否 的功能. 它包括主程序、 否 计算子程序、语音播报子 程序、定时中断子程序等. 主程序主要完成寄存器、 是否超时? 变量初始化、超声波产生, 以及语言提示子程序的调 是 用. 中断子程序用来响应 回波信号, 当有回波信号 时, 立即停止计时, 然后 转入计算程序.
团队成员
团队成员:
刘春奎 赖文彬 蒋金童 陈永雯 喻再君 10级电子专业 10级通信工程 10级电子专业 10级通信工程 10级电子专业
1.项目背景及意义
• 中国是世界盲人最多的国家,约有500万,占全世界盲人口的 18%,由于生理上的缺陷, 盲人在生活、工作等方面有着 诸多不便, 其中, 如何安全行走是盲人生活中最大的问题. 而传统的盲人导航设施都有局限性, 如费用高、定位范围 小、受环境影响较大等. 超声波具有方向性强、能量易于 集中、传播距离较远, 以及对障碍物定位具有一定的精确 性、体积相对较小、方便携带、价格低廉等特点.故本课 题拟设计一个利用超声波测距来检测前方道路状况的语音 提醒器,以检测前方道路的平整度,为盲人提供道路坑穴、 障碍等信息。该系统可增强盲人的行走能力,提高盲人的 生活质量,且具有体积小、功耗低和易于携带的优点,适 合于盲人在外出中应用。
盲人辅助行走拐杖的设计

盲人辅助行走拐杖的设计赵春雨;王威锋;汤亚广【摘要】Traditional blind crutch is just an ordinary stick, obstacles blind people only feel touch, make them in the walk with hidden safety trouble. Aiming at this problem, this paper based on the STC microcontroller design of a blind auxiliary walking stick, the designed to mimic the bat avoidance principle, using the embedded technology and ultrasonic ranging technology, obstacle detection in front of the blind, controlled by microcomputer to collect information, and the use of related software, human voice prompts the need for warning information. Experimental results show that the design of blind auxiliary walking stick can provide effective help the blind identification of obstacles and their distance , for the blind to that plan, reduce the risk in the process of walking, so as to help the blind to walk independently objective. At the same time, stick with special telescopic folding structure, make it more convenient for different user groups and use.%传统盲人的拐杖仅仅是一根普通长棍,盲人只能感觉接触到的障碍物,使得他们在行走中充满了安全隐患。
基于地图导航的智能化盲人拐杖的设计与实现

基于地图导航的智能化盲人拐杖的设计与实现【摘要】智能化盲人拐杖是一项新型的辅助设备,旨在帮助视障人士更好地出行和导航。
本文基于地图导航技术,设计并实现了一款智能化盲人拐杖。
在设计原理方面,利用传感器技术和地图数据,实现对环境的实时感知和定位。
硬件部分包括传感器模块、导航模块等,软件部分则包括地图数据处理和导航算法。
地图导航算法需要精准的定位和路径规划,以确保盲人用户安全到达目的地。
实验结果表明,该智能化盲人拐杖具有良好的导航性能和用户体验。
创新点在于结合地图导航技术和传感器技术,为盲人提供更精准和便捷的导航服务。
未来可以进一步优化算法和硬件设计,提升导航准确性和稳定性。
总结认为,智能化盲人拐杖的研发将有效帮助盲人出行,提高生活质量。
【关键词】盲人、拐杖、智能化、地图导航、设计原理、硬件、软件、算法、实验结果、创新、展望、总结、建议1. 引言1.1 背景介绍盲人是社会上的弱势群体,他们在生活中面临很多困难和挑战。
盲人拐杖作为盲人日常生活中不可或缺的辅助工具,能够帮助盲人更好地行走和感知周围环境。
传统的盲人拐杖只能提供基本的支撑功能,无法帮助盲人更精准地导航到目的地。
随着科技的不断发展,智能化盲人拐杖应运而生。
基于地图导航的智能化盲人拐杖结合了传统拐杖的支撑功能和现代技术的智能化导航功能,可以为盲人提供更便捷的出行体验。
通过使用地图导航算法和定位技术,智能化盲人拐杖可以帮助盲人规划最优路线,避开障碍物,准确到达目的地。
本文旨在探讨基于地图导航的智能化盲人拐杖的设计与实现,旨在为盲人提供更多的出行支持和帮助。
通过设计原理、硬件设计与实现、软件设计与实现、地图导航算法以及实验结果与分析等方面的介绍,展示智能化盲人拐杖的优势和实用性。
希望本文能为智能化辅助设备的发展和盲人群体的生活带来改变和便利。
1.2 研究意义智能化盲人拐杖的研究意义在于提高盲人的生活质量。
通过地图导航功能,盲人可以更加方便快捷地到达目的地,减少迷路的可能性,提高出行的安全性和效率。
基于超声波技术的导盲杖设计
必须 的。 由于超声波发射点与接收点不是 同一点 ( 如相距 4 mm) 而距离应 0 ,
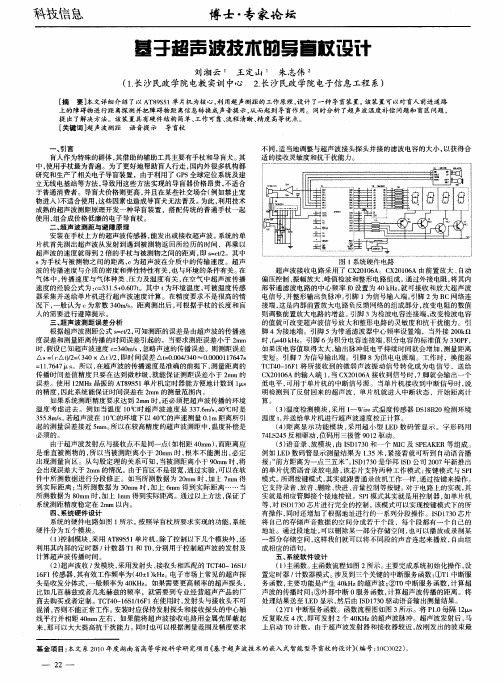
图l 系统硬件电路 超声波接收 电路采用 了 C 0 0A。C 2 16 X2 16 X 0 0 A由前置 放大 、 自动 偏压控制 、 振幅放大 、 峰值检波和整形电路组成。 通过外接 电阻, 将其 内 部带通滤波 电路 的中心频率 f 置为 4 Hz就可接收 和放 大超声波 0设 0k , 电信号 , 并整形输出负脉冲。 引脚 1 为信号输入端 。 引脚 2为 RC网络连 接端 , 这是 内部前置放 大电路 负反馈 网络的组成部分 , 改变电阻 的数值 则调整前置放大电路 的增益 。引脚 3为检波电容连接端, 改变检波 电容 的值就可改变超声 波信号 放大和整形电路的灵敏度和抗干扰能力 。引 脚 4为接地端。引脚 5为带通滤波器中心频率设 置端 ,当外接 2 0 n 0k 时 ,= 0k 。引脚 6为积分电容连接端 , f 4 Hz o 积分电容的标 准值 为 30 F 3P , 如果该 电容值取得太大 , 输出脉冲低电平持续时间就会增加 , 测量距离 变短 。引脚 7 为信号输出端 。引脚 8 为供 电电源端 。l 作时 ,换能器 I 二 T T 0 1F 将所 接收到的微弱声 波振动信号转化 成为 电信 号 ,送给 C4 —6 1 C 2 16 X 0 0 A的输入端 1当 C 2 1 6 , X 00 A接收到信号时 , 脚就会输 出一个 7 低 电平 , 可用于单片机的中断信号源。当单片机接收到中断信号时 , 说 明检测到了反射回来的超声波 ,单片机就进入 中断状态 ,开始距离计 算。 () 3 温度检测模块 , 用 l 采 —wi 式温度传感器 D 1B 0检测环境 r e S8 2 温度 t并送给单片机进行超声波速度校正计算 。 , ( ) 离显示功能 模块 , 用超小 型 L D数码 管显示 。字 形码用 4距 采 E 7 1 2 5反相驱动 , 45 4 位码用三极管 9 1 0 2驱动 。 () 5 语音录 、 放模块 , ID 7 0 由 S 13 和一个 M C及 S E K R等组成 。 I PA E
一种基于超声波测距的导盲系统设计
一种基于超声波测距的导盲系统设计作者:田宇航张旭东陈志远吕雪杰曹珊珊来源:《电子技术与软件工程》2017年第07期摘要针对市场上导盲系统存在的缺点:成本高、结构复杂、功能少、操作难度高,进而无法实现较好的导盲效果。
本设计旨为盲人提供一种行走时,能准确判别前方路况并及时躲避的智能导盲预警系统。
该系统以STM32F103C8T6作为主控,具有GPS坐标定位、GSM短信发送、超声波避障、警报提示等多功能的智能导盲预警系统。
经实验测试,该系统可以成功指导盲人提前躲避障碍物,获取盲人位置信息,对保障盲人出行安全具有重要意义。
【关键词】智能避障超声波测距 GPS定位 STM32 语音导航1 引言盲人是指双目失明或单目失明的人,不同于其他社会群体,他们由于先天或后天的生理缺陷而长期处于“黑暗”生活环境中,相比于正常人而言,他们的生活有许多不方便,不能准确及时的发现并躲避障碍物是其中一个重要弊端之一。
国际上欧美等发达国家和国内少数家庭多采用导盲机器人或导盲犬,导盲效果好但成本较高,难以普及。
基于此,本文结合电子技术与机械结构创新,设计了一款以GPS定位、超声波测距为主要功能的智能导盲预警系统。
2 系统总体设计该系统由超声波测距单元、语音播报单元、GPS定位单元、信息收发单元、声光报警单元及外围电路构成。
采用STM32F106C8T6作为主控,主控在接收到超声波测距的信息后,可以进行语音提示,指导盲人避让前方的障碍;通过GPS定位单元,定位用户的位置并通过信息收发单元上传至网络数据库;结合高德地图接口,借助语音播报实时对用户进行GPS定位导航。
同时考虑在夜晚能见度低时,由声光报警单元提示来往行人和车辆主动避让。
系统总体设计如图1所示。
3 系统硬件设计3.1 核心控制模块本设计所选用的STM32F103C8T6单片机,是一款基于ARM Cortex架构的中等容量增强型微处理控制器,扩展48个GPIO口、FLASH 128KB、工作电压:2V~3.6V。
合肥市2024-2025学年八年级上学期物理期中模拟卷(考试范围:机械运动、声现象、物态变化)

安徽省合肥市2024-2025学年八年级物理期中模拟卷(考试范围:机械运动、声现象、物态变化)一、选择题1.下列措施中从声源处消除噪声的是()A.在道路两旁植树B.开会时把手机关机或调成静音状态C.电影院采用隔音墙D.强噪声环境下的工作人员佩戴耳罩2.小刚同学在实验室研究物态变化时,依据实验数据正确地画出了如图所示的图像。
其中反映晶体凝固过程的图像是()A.B.C.D.3.下列数据中,最接近生活实际的是()A.初中物理课本一页纸的厚度约为2mmB.人的步行速度约为5m/sC.中学生体育加试用的实心球质量约为2000gD.人体感觉舒适的环境温度为37℃4.在加勒比海红树林中,科学家发现最大的细菌——华丽硫珠菌,形如一根细绳,可用肉眼直接观察,如图所示,其长度l为()A.2cm B.2.0cm C.2.00cm D.2.000cm5.如图所示是某款“超声波传感器”智能拐杖,其通过超声波传感器加蜂鸣器实现距离报警,可以帮助盲人出行,下列说法正确的是()A.盲人能听到这种超声波B.超声波传递不需要介质C.这种超声波的发声体振动特别快D.该产品利用超声波测距说明声音能够传递能量6.下列用厚刻度尺测量木块长度的操作中,正确的是()A.B.C.D.7.一跳伞运动员在下落过程中,看到身旁的直升飞机在向下运动,则直升飞机相对于地面()A.一定上升B.一定下降C.可能静止D.可能上升8.弦乐队在演奏前,演奏员都要调节自己的乐器——拧紧或放松琴弦,这样做主要是改变乐器发出的声音的()A.振幅B.响度C.音调D.音色9.下列有关声现象的说法正确的是()A.该装置可用于探究“声音的响度与发声体振动的频率有关”B.声音通过头骨、颌骨也能传到听觉神经,引起听觉C.工厂用的防噪音耳罩是在传播过程中减弱噪音D.两个声音波形图的响度一样,音调和音色不同10.如图所示,小华将悬挂的乒乓球紧靠音叉,用小槌轻敲和重敲音叉时,乒乓球弹开的角度不同。
超声波盲人探路仪的设计
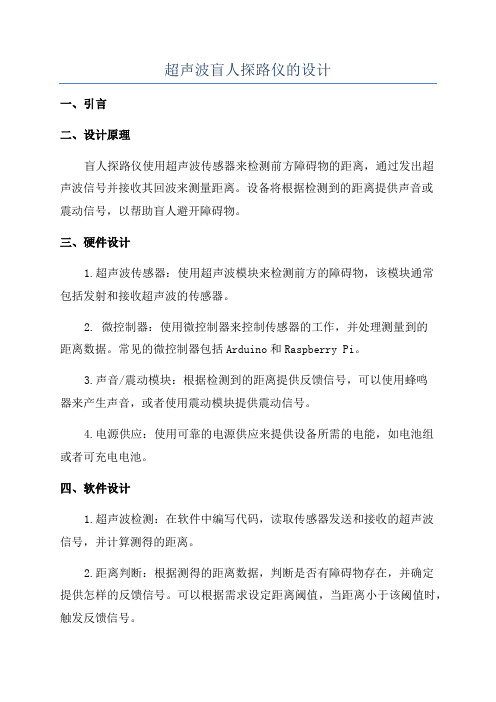
超声波盲人探路仪的设计一、引言二、设计原理盲人探路仪使用超声波传感器来检测前方障碍物的距离,通过发出超声波信号并接收其回波来测量距离。
设备将根据检测到的距离提供声音或震动信号,以帮助盲人避开障碍物。
三、硬件设计1.超声波传感器:使用超声波模块来检测前方的障碍物,该模块通常包括发射和接收超声波的传感器。
2. 微控制器:使用微控制器来控制传感器的工作,并处理测量到的距离数据。
常见的微控制器包括Arduino和Raspberry Pi。
3.声音/震动模块:根据检测到的距离提供反馈信号,可以使用蜂鸣器来产生声音,或者使用震动模块提供震动信号。
4.电源供应:使用可靠的电源供应来提供设备所需的电能,如电池组或者可充电电池。
四、软件设计1.超声波检测:在软件中编写代码,读取传感器发送和接收的超声波信号,并计算测得的距离。
2.距离判断:根据测得的距离数据,判断是否有障碍物存在,并确定提供怎样的反馈信号。
可以根据需求设定距离阈值,当距离小于该阈值时,触发反馈信号。
3.反馈信号:根据检测到的距离提供相应的反馈信号。
可以使用文本转语音的技术,将距离信息转化为声音信号,通过蜂鸣器播放出来;或者使用震动模块产生不同频率或强度的震动,引导盲人避开障碍物。
4.用户接口:为了方便用户使用,可以在设备上添加按钮或滑动开关,用于开启或关闭探路仪,或调节反馈信号的音量和震动强度。
5.可拓展性:除了基本的超声波探路功能,还可以添加其他功能,如声音导航、地图定位等。
五、结论超声波盲人探路仪是一种简单而有效的辅助性设备,帮助视力受损人士更好地导航和移动。
该设备基于超声波传感技术,通过测量前方障碍物的距离,提供适当的声音或震动反馈。
本文介绍了超声波盲人探路仪的硬件和软件设计原理,并提出了一些可拓展性的改进方向,以满足用户的不同需求。
基于超声波传感器的导盲杖设计

基于超声波传感器的导盲杖设计孟祥薇;严锡君;欧阳星辰;余敏;卜肠【摘要】基于我国盲人及视力障碍者数量大,行动不便,设计导盲杖用于识别路况,有助于盲人日常生活。
应用嵌入式技术和超声波技术设计导盲杖,用超声测距模块分别探测正前方、左前方和右前方3个方向的障碍物,用C8051F360单片机获取3个距离信息,并根据处理结果通过语音进行提示;同时,用另一超声波模块对路面情况进行探测,根据距离信息判断路况,并通过语音进行提示。
本装置具有障碍物探测及时、路面情况探测准确、成本低、可靠性高、操作方便的特点,可为盲人行走提供安全保障。
%China has a great number of blind men or man with visual disturbance, which bring inconvenient. Designing a blind guiding crutch that can identify road conditions can benefit those people. Apply embedded and ultrasonic technology to design the blind guiding crutch. Use ultrasonic sensors to detect obstacles in three directions, dead ahead, left anterior and fight anterior. The three distances data are transferred to single chip C8051F360, which will give out voice prompt based on its analyzing results on the distance data. Meanwhile, another ultrasonic detects road condition by providing distance data to the single chip, which will also give out voice prompL This device has characteristics of detecting obstacles in time, detecting road conditions correctly, low cost, high reliability, convenient operations, which can provide safe guarantee for the blind walking.【期刊名称】《电子设计工程》【年(卷),期】2012(020)017【总页数】4页(P11-14)【关键词】C8051F360;超声波;语音;导盲杖【作者】孟祥薇;严锡君;欧阳星辰;余敏;卜肠【作者单位】河海大学计算机与信息学院,江苏南京211100;河海大学计算机与信息学院,江苏南京211100;河海大学计算机与信息学院,江苏南京211100;河海大学计算机与信息学院,江苏南京211100;河海大学计算机与信息学院,江苏南京211100【正文语种】中文【中图分类】TP39我国盲人及视力障碍者数量大,约占全世界盲人总数的20%。
实验四——基于超声波传感器的盲人行走探测器
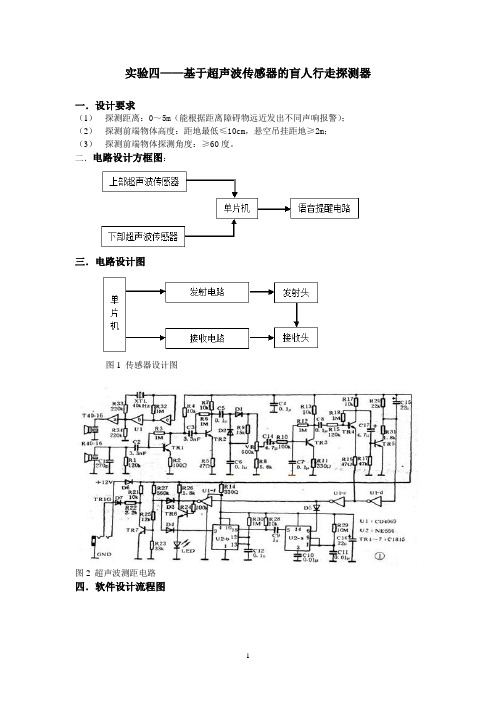
实验四——基于超声波传感器的盲人行走探测器一.设计要求(1)探测距离:0~5m(能根据距离障碍物远近发出不同声响报警);(2)探测前端物体高度:距地最低≤10cm,悬空吊挂距地≥2m;(3)探测前端物体探测角度:≥60度。
二.电路设计方框图:三.电路设计图图1 传感器设计图图2 超声波测距电路四.软件设计流程图五.电路设计原理1.各单元电路原理(1)工作时单片机控制发送超声波,探测前方是否有障碍物,并接收反射回超声波传感器的信息。
根据上下两个传感器传回的不同信息计算障碍物据两个传感器的距离,从而确定其方位。
使用者需将两个传感器别在衣物的两个地方,比如肩头和膝盖处,两个传感器之间的距离要适当远,这样得到的距离才准确。
为了区分两个传感器的信息,发送两种不同波长的超声波。
(2)具体来看,40KHZ的超声波脉冲信号由单片机的P1.0口输出。
由于其电流十分有限,所能提供的功率无法满足超声波传感器发射所需要求,因此设计时在输出端接上一个由比较器LM311构成的比较电路来驱动超声波发射头。
发射出的超声波遇到障碍物反射回来,超声波传感器接收头接收。
在设计硬件电路时,需注意保证超声波接收器与发射器相互对应,否则会影响超声波的接收效果。
由于经过反射后的信号较弱,单片机接收后难以进行判断,因此需要设计放大电路对接收到的正弦信号进行放大。
本系统采用集成运放实现,选用低通滤波放大器INAI 11对反射回来的超声波信号进行放大并且滤除部分干扰信号,得到的信号送人单片机内部进行信号处理.由单片机通过声波传输时间计算障碍物的距离。
五.仪器选择原理1.传感器选择1. 选用超声波传感器。
超声波传感器不断发送超声波,在发送的同时开始计时.发射波在空气中遇到障碍物后反射回来.超声波接收头收到反射信号后.随即停止计时。
利用记录下的发射和接收信号时间羞t.便可获得障碍物的距离.其计算公式为:S=C*t/2。
声波在空气中的传播速率c的计算公式:C=331.4√(1+T/273)m/s,其中T为摄氏温度。
超声波探测实验实验报告(3篇)
第1篇一、实验目的1. 了解超声波的基本原理及其在探测中的应用。
2. 掌握超声波探测仪器的操作方法和使用技巧。
3. 通过实验,验证超声波探测技术在实际测量中的应用效果。
二、实验原理超声波探测技术是利用超声波在介质中传播的特性,通过发射、接收和反射等过程来获取被测物体内部结构信息的一种非接触式检测方法。
超声波探测的原理如下:1. 超声波的产生:利用压电换能器将电能转换为超声波能量。
2. 超声波的传播:超声波在介质中传播,遇到不同介质的界面时会发生反射、折射和透射等现象。
3. 超声波的接收:接收换能器接收反射回来的超声波信号。
4. 信号处理:通过信号处理技术,提取出有用的信息,如距离、速度、厚度等。
三、实验设备1. 超声波探测仪2. 超声波发射器3. 超声波接收器4. 试块(用于模拟被测物体)5. 计时器6. 示波器7. 数据采集器四、实验步骤1. 连接设备:将超声波发射器、接收器、探测仪和试块连接好。
2. 调整参数:根据实验要求,设置探测仪的频率、灵敏度等参数。
3. 放置试块:将试块放置在实验台上,确保其稳定。
4. 发射超声波:打开超声波发射器,向试块发射超声波。
5. 接收反射波:打开超声波接收器,接收试块反射回来的超声波信号。
6. 观察波形:使用示波器观察反射波波形,记录反射波的时间、幅度等信息。
7. 数据处理:根据反射波的时间和幅度,计算出被测物体的厚度、距离等参数。
8. 重复实验:改变试块的位置和角度,重复实验步骤,验证实验结果的准确性。
五、实验结果与分析1. 反射波时间:通过实验,我们得到了不同位置和角度下反射波的时间。
根据反射波时间和超声波在介质中的传播速度,可以计算出被测物体的厚度。
2. 反射波幅度:反射波幅度反映了超声波在试块中的衰减程度,从而可以判断试块内部是否存在缺陷。
3. 实验误差:实验过程中,由于设备精度、环境因素等原因,可能会产生一定的误差。
通过多次实验,我们可以分析误差产生的原因,并采取措施减小误差。
超声波盲人探路仪的设计

超声波盲人探路仪的设计摘要本文设计一种由74LS04反相器和CX20106搭接电路实现了超声波的发射与接收。
采用超声波发射与接受等技术,设计出盲人外出行走所需要提醒绕过前方障碍物的一种超声波探测器。
只需将超声波盲人探路器安装在盲人的拐杖上,当盲人在走路时前面有障碍物,拐杖上的盲人探路器就会发出报警声,因此起到提示的作用小心绕行。
并能语音播报离障碍物的距离,让盲人能够了解障碍物离自己的距离。
这种超声波盲人探路器使用方便可靠且价格低廉,适合盲人和老人夜间走路,能有效防止事故的发生, 盲人在外出时都会带一根拐杖来探路,以躲避障碍。
由于拐杖不可能太长,探测范围十分有限,利用超声波探测原理组成一个微型探测器并组装在拐杖手柄内,不仅可以提高探测效果和探测距离,而且使用十分方便。
【关键词】89C52 ;单片机;74LS04反相器CX20106电路;超声波的发射与接收;NY3P065AP8;语音芯片THE DESIGN OF THE ULTRASONIC BLIND LIGHTING APPARATUSAbstractIn this paper, the design of a 74LS04 inverter and CX20106 lap circuit achieves ultrasonic transmitter and receiver. Emitting and receiving ultrasonic technology, designed to remind the blind need to walk out in front of obstacles to bypass an ultrasonic detector. Just ultrasonic blind Pathfinder mounted on the blind cane, when there is an obstacle in front of the blind in walking, the blind Pathfinder crutches will sound an alarm on, and therefore play a role in prompting caution bypass. And can voice broadcast from the obstacle distance from obstacles so that blind people can understand their distance. This ultrasonic blind Pathfinder is reliable and easy to use and inexpensive, for the blind and the elderly to walk at night, can effectively prevent the occurrence of the accident, when the blind will go to Pathfinder with a crutch to avoid obstacles. Since crutches not be too long, the detection range is very limited, using ultrasonic detection principle to form a micro-probe and assembled in the cane handle, not only can improve the detection performance and detection range, and easy to use.【Keywords】89C52; SCM; 74LS04 CX20106 inverter circuit; ultrasonic transmitter and receiver; NY3P065AP8; voice chip目录摘要 (I)Abstract.......................................................................................................................................................... I I 目录 ............................................................................................................................................................ - 0 -第1章前言 .................................................................................................................................... - 1 -1.1系统开发背景..................................................................................................................... - 1 -1.2系统开发意义..................................................................................................................... - 1 -1.3设计目的............................................................................................................................. - 1 -第2章系统硬件电路的设计......................................................................................................... - 2 -2.1 主控芯片电路设计.................................................................................................................... - 2 -2.2 超声波测距电路设计................................................................................................................ - 3 -2.2.1 超声波发射电路设计............................................................................................................... - 4 -2.3 语音播报电路的设计.................................................................................................................. - 5 -2.4 蜂鸣器提醒电路的设计............................................................................................................ - 6 -第3章系统软件程序设计............................................................................................................. - 7 -3.1 超声波程序设计.......................................................................................................................... - 8 -3.2 语音播报程序设计...................................................................................................................... - 9 -3.3 蜂鸣器程序设计........................................................................................................................ - 10 -总结 ........................................................................................................................................................ - 11 -参考文献 .................................................................................................................................................. - 12 -附录 A ........................................................................................................................................................ - 0 -附录 B ........................................................................................................................................................ - 0 -致谢 ........................................................................................................................................................ - 5 -第1章前言1.1 系统开发背景蝙蝠能在完全黑暗中,以极快的速度精确地飞翔,从不会同前方的物体相撞,蝙蝠在飞行时,喉内产生并能从通过口腔发出人耳听不到的超声波,当遇到食物或障碍物时,超声波会反射回来,蝙蝠用两耳接受物体的反射波,并据此确定该物体的位置,并可从两耳分别接受到回波间的差别,来辨别物体的远近、形状及性质,蝙蝠在空中能利用超声波来“导航”,就能迅速准确捕捉飞虫。
基于超声波传感器的自主移动机器人的探测系统

基于超声波传感器的自主移动机器人的探测系统作者:金文俊冯浩华亮来源:《现代电子技术》2008年第04期摘要:针对自主移动机器人沿墙导航过程,设计一种收发一体式超声波传感器与步进电机组成的探测系统。
介绍此系统的结构和软硬件设计。
实验总结超声波波束与目标物的入射角大小对测距稳定性的影响,提出搜寻离墙最近点的方法并应用于移动机器人自身位姿的矫正,且推广应用于移动机器人的环境探测。
关键词:超声波传感器;移动机器人;最近点;探测系统中图分类号:TPl8文献标识码:B文章编号:1004—373X(2008)04—156—03移动机器人要获得自主行为,其最重要的任务之一是获取关于环境的知识。
这是用不同的传感器测量并从那些测量中提取有意义的信息而实现的。
视觉、红外、激光、超声波等传感器都在移动机器人中得到实际应用。
超声波传感器以其性价比高、硬件实现简单等优点,在移动机器人感知系统中得到了广泛的应用。
但是超,声波传感器也存在一定的局限性,主要是因为波束角大、方向性差、测距的不稳定性(在非垂直的反射下)等,因此往往采用多个超声波传感器或采用其他传感器来补偿。
为了弥补超声波传感器本身的不足,又能提高其获取环境信息的能力,本文设计由一体式超声波传感器与步进电机组成的探测系统。
1 超声波传感器的探测原理及方法分析超声波传感器的基本原理是发送(超声)压力波包,并测量该波包发射和回到接收器所占用的时间。
L=c×t/2(1)其中,L为目标距超声波传感器的距离;c为超声波波速(为了简化说明,本文以下讨论的测量距离时不考虑波速受温度的影响);t为发射到接收的时间间隔。
由于用超声波测量距离并不是一个点测量。
超声波传感器具有一定的扩散特性,发射的超声能量主要集中在主波瓣上,沿着主波轴两侧呈波浪型衰减,左右约30°的扩散角。
事实上,式(1)计算度越时间的方式是基于超声波成功、垂直的反射名义下进行的。
但对于移动机器人很难保证其自身运动姿态的稳定性,采用超声波传感器固定在移动机器人车身的探测方式,当移动机器人偏离平行墙面时,探测系统往往很难得到实际的距离。
毕业论文基于超声波技术的导盲杖设计(论文)

基于超声波技术的导盲杖设计论文龙剑赵凤娟李伟钦邹东江强进指导老师:谭永宏(湖南科技学院电子工程系)摘要:由于电子技术和压电材料的快速发展,使超声波检测技术得到了迅猛发展。
利用超声波指向性强、能量消耗缓慢的特点,通过发射具有特征频率的超声波实现对目标的探测便是超声检测技术的应用之一。
本文利用超声波障碍检测技术设计了一款导盲杖,该导盲杖能自动检测前方3米范围内障碍物,采用语音和振动两种方式有效提示盲人避障。
本设计是一种基于超声波测距技术,以STC89C52单片机为核心的低成本、高精度智能导盲杖。
整个系统包括主控制器、超声波发射器、超声波接收器、温度补偿模块、语音播报模块、电源、开关、拐杖把和拐杖体。
在拐杖体和拐杖把对接处制有便于握杖手按动的电源开关,拐杖体采用刚性材料制成内腔为空体式,内腔中安装有控制电路板、电源及超声波发射与接收器件;在拐杖体下端、中间、顶端与拐杖把拐向相对应方向装有上、下排列的超声波发射器与接收器共3对。
在拐杖把下端有一语音播报模块。
本系统能够感应到使用者前方3米内脸部,腿部高度处的障碍物,并通过震动手柄,及语音播报通知使用者,以保障盲人的行路安全。
【关键词】导盲杖超声波测距技术语音播报 STC89C52一引言随着信息化和数字化的发展 ,现在社会中人们的生活变得更加丰富多彩 ,生活更加便利。
但是有一种人群却不容忽视 ,社会上形形色色、丰富多彩的物是与他们无缘的,他们就是盲人。
众所周知眼晴是“心灵之窗” ,而对于突然失去或从未拥有过“心灵之窗”的盲人来说 ,生活上的困难与心理上的痛苦是可想而知的。
他们的衣食住行存在诸多不便 ,而在出行与人际交往中遇到的困难更加突出。
目前,市场上的导盲工具主要是导盲犬 ,导盲犬习惯于颈圈、导盲牵引带和其他配件的约束;懂得“来”、“前进”、“停止”等口令,可以带领盲人安全地走路,当遇到障碍和需要拐弯时,会引导主人停下以免发生危险。
但是 ,导盲犬的培训过程长达 18 个月 ,综合费用达 2.5~3万美元 ,如此昂贵的价格不是普通用户能承担的,所以设计一款基于超声波技术的导盲杖。
基于超声波传感器和GPS的多功能导盲杖设计

• 25•基于超声波传感器和GPS的多功能导盲杖具有超声波避障、GPS定位导航、系统语音播报和紧急警报功能。
超声波避障能够有效的识别前方腿部以上不贴合地面的障碍物,GPS导航帮助盲人识别路线安全回家,考虑到盲人外出发生意外和不定项因素我们采用语音播报和紧急警报增加了盲人外出的安全性。
1 系统的功能介绍本项目采用51单片机对整体电路进行控制进行总体控制,利用当盲杖本身的特点,对前方路面的上的障碍物进行识别,通过超声波传感器识别导盲杖无法触碰到的腿部以上不贴合地面的障碍物,当有前方障碍物距离盲人到达设定距离时,语音播报模块将会发出规律短促提示音,距离障碍物越近播报声音越急促,提醒盲人要尽快躲避,与传统导盲杖相比扩大了障碍物可识别的范围。
导盲杖内部GPS模块可以实时定位当前所在位置,导盲杖设有两个开关,当使用者无法识别当前道路时,按下导航按钮即可通过语音模块发出的提示安全回家。
警报按钮按下时,单片机控制蜂鸣器发出警报,帮助盲人遇难时寻求帮助。
基于超声波传感器和GPS的多功能导盲杖设计相对于传统导盲杖功能更加全面,更加2.1 主体80C51芯片80C51控制芯片,其主要目的为驱动各个传感器,发送控制信号以及接收传感器检测的信息,将接受和发送的信号进行运算处理,重复发送接收过程,进而连接各个部分元器件,将功能综合化。
2.2 超声波避障系统超声波避障,主要采用超声波传感器和语音播报系统,超声波传感器将检测的超声波信号转化成电信号发送给51单片机芯片,单片机将接收到的电信号进行比较、处理、运算,通过超声波模块识别的距离发送的不同信号,单片机的内部程序将会对信号进行分类,再发送相应命令给语音播报系统,语音播报系统接收到电信号,控制相应的语音信号发出。
2.3 GPS导航系统GPS导航系统,主要采用WF-NEO-6M GPS模块其特点是高性能、低功耗,通过时间差和速度计算距离进而确定使用者的位置,卫星增强系统(SBAS)进行校正数据减小了误差,其中SBAS (卫星增强系统)是一种GPS增强技术,它利用地面的RIMS(测距和完整性监测站)计算GPS完整性和校正数据,并利用地球同步基于超声波传感器和GPS的多功能导盲杖设计泰山学院物理与电子工程学院 孟 辛 李雪莉图1 基于超声波传感器和GPS的多功能导盲杖设计图智能化、便捷化、安全化,增加了太阳能充电,安全环保,续航时间长,本产品更加保障了盲人出行的安全性,符合新型导盲杖的发展趋势。
基于超声波的盲人导盲系统的设计

基于超声波的盲人导盲系统的设计毛达许;程海玉【摘要】In order to avoid the interference problem receiving equipment appear to use infrared automatic perceived barriers equipment itself actively send the signal, the design of a portable device, the blind when walking to the device worn on the arm, or installed on a crutch, the device can real-time detect whether there exist obstacles within a distance in front. And by the voice system sends reminders, can effectively avoid the blind man hit the barrier and the injuries. Ultrasonic wave has strong direction, energy easy to set in, communication distance, and has certain accuracy, relatively small volume, convenient carrying, low price and other characteristics of the obstacles by using ultrasonic distance measurement positioning, design and implementation of the blind guide device, has a certain practical value.%为了避免使用红外线自动感知障碍设备时出现的接收设备本身主动发送信号的干扰问题,设计一种简易便携装置,盲人在行走时把此装置戴在手臂上,或者安装在拐杖上,该装置能够实时探测前方一段距离内是否有障碍物存在,并由语音系统发出提醒,可以有效地避免盲人撞到障碍物而受伤的情况。
基于超声波技术的盲人导航系统应用的实验研究
基于超声波技术的盲人导航系统应用的实验研究盲人导航系统是一个盲人朋友们十分需要的帮助工具。
在市面上,有很多种形态的盲人导航系统。
其中,基于超声波技术的盲人导航系统用起来十分方便,一举成为用户的心头好。
在本文中,我们将重点探究基于超声波技术的盲人导航系统,并通过实验研究来证明该系统的实用性。
一、超声波技术在盲人导航中的应用超声波技术,在盲人导航系统中,是一种常用的传感技术。
它的原理是利用超声波的反射来测量距离。
系统通过发送出超声波,在碰到物体时被反弹,然后被系统接收器检测到,并转化为声音信号,输出到耳机内供盲人使用。
基于这个原理,盲人可以通过不停地发出超声波,来获取周围环境的信息。
通过声波反射返回到系统中的信号,可以获取物体的距离、大小及位置等信息,让盲人更好地知道周围的物体分布情况,从而帮助他们进行安全导航。
二、实验研究结果与分析但是,超声波技术也有其缺陷。
要想获取准确的位置信息,需要与物体之间保持一定的距离。
这样一来,对于超声波检测来说,他将无法检测得到太小的物体,因为距离太近。
幸好,这类问题,可以通过加入其他传感器来解决。
我们的实验团队在研究过程中,将超声波技术与摄像头传感器相结合,加以改进。
在实验室里我们建立了一个虚拟的盲人导航系统,用户可以在系统中自由走动,同时感受到超声波和视频图像传感器的指导。
在实验中,我们让盲人参与进来,通过观察他们在使用该系统时的情况,我们发现,这种多传感器结合的系统可以更好地在距离测量和传感范围方面提高精确度。
得益于摄像头传感器的出色表现,系统也可以识别出超声波难以检测到的小物体和地形的变化。
在测试过程中,我们通过记录盲人在实验中行走的路程,以及超声波和摄像头接收到的数据量,来分析系统的可用性和精度。
顺利地善用到摄像头传感技术,这个导航系统在室内与室外的测试中表现均良好,图像传感器的出色表现使得盲人们可以看到周围的环境,做到更好的方向判断。
三、结语随着科技的快速发展,我们对于导航系统的要求也越来越高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四——基于超声波传感器的盲人行走探测器
一.设计要求
(1)探测距离:0~5m(能根据距离障碍物远近发出不同声响报警);(2)探测前端物体高度:距地最低≤10cm,悬空吊挂距地≥2m;
(3)探测前端物体探测角度:≥60度。
二.电路设计方框图:
三.电路设计图
图1 传感器设计图
图2 超声波测距电路
四.软件设计流程图
五.电路设计原理
1.各单元电路原理
(1)工作时单片机控制发送超声波,探测前方是否有障碍物,并接收反射回超声波传感器的信息。
根据上下两个传感器传回的不同信息计算障碍物据两个传感器的距离,从而确定其方位。
使用者需将两个传感器别在衣物的两个地方,比如肩头和膝盖处,两个传感器之间的距离要适当远,这样得到的距离才准确。
为了区分两个传感器的信息,发送两种不同波长的超声波。
(2)具体来看,40KHZ的超声波脉冲信号由单片机的P1.0口输出。
由于其电流十分有限,所能提供的功率无法满足超声波传感器发射所需要求,因此设计时在输出端接上一个由比较器LM311构成的比较电路来驱动超声波发射头。
发射出的超声波遇到障碍物反射回来,超声波传感器接收头接收。
在设计硬件电路时,需注意保证超声波接收器与发射器相互对应,否则会影响超声波的接收效果。
由于经过反射后的信号较弱,单片机接收后难以进行判断,因此需要设计放大电路对接收到的正弦信号进行放大。
本系统采用集成运放实现,选用低通滤波放大器INAI 11对反射回来的超声波信号进行放大并且滤除部分干扰信号,得到的信号送人单片机内部进行信号处理.由单片机通过声波传输时间计算障碍物的距离。
五.仪器选择原理
1.传感器选择
1. 选用超声波传感器。
超声波传感器不断发送超声波,在发送的同时开始计时.发射波在空气中遇到障碍物后反射回来.超声波接收头收到反射信号后.随即停止计时。
利用记录下的发射和接收信号时间羞t.便可获得障碍物的距离.其计算公式为:S=C*t/2。
声波在空气中的传播速率c的计算公式:C=331.4√(1+T/273)m/s,其中T为摄氏温度。
2.单片机选择
MSP430是德州仪器公司开发的一类具有16位总线的带FLASH的单片机,由于其性价比和集成度高,受到广大技术开发人员的青睐。
3.语音提醒电路选择
语音提醒电路采用模拟声电路KD56022。
该电路采用3V电源,低电平触发。
电路中采用3V DW将6V电源变为3V,供语言电路使用。
该电路可根据路况的不同提醒使用者障碍的位置及距离。