数字信号处理第9章答案详解
DSP原理及应用课后答案电子工业
第二章3、处理器工作方式状态寄存器PMST 中的MP/MC、OVLY 和DROM 三个状态位对C54x的存储空间结构各有何影响?当OVLY= 0 时,程序存储空间不使用内部RAM。
当OVLY= 1 时,程序存储空间使用内部RAM。
内部RAM 同时被映射到程序存储空间和数据存储空间。
当MP/ MC=0 时,4000H~EFFFH 程序存储空间定义为外部存储器;F000H~FEFFH 程序存储空间定义为内部ROM;当MP/ MC=1 时,4000H~FFFFH 程序存储空间定义为外部存储。
DROM=0:0000H~3FFFH—— 内部RAM ;4000H~FFFFH—— 外部存储器;DROM=1 :0000H~3FFFH——内部RAM;4000H~EFFFH——外部存储器;F000H~FEFFH——片内ROM;FF00H~FFFFH——保留。
4 、TMS320C54x 芯片的片内外设主要包括哪些电路?①通用I/O 引脚②定时器③时钟发生器④主机接口HPI⑤串行通信接口⑥软件可编程等待状态发生器⑦可编程分区转换逻辑5、TMS320C54x 芯片的流水线操作共有多少个操作阶段?每个阶段执行什么任务?完成一条指令都需要哪些操作周期?六个操作阶段:①预取指P;将PC 中的内容加载PAB ②取指F; 将读取到的指令字加载PB③译码D; 若需要,数据1 读地址加载DAB;若需要,数据2 读地址加载CAB;修正辅助寄存器和堆栈指针④寻址A; 数据1 加载DB;数据2 加载CB;若需要,数据3 写地址加载EAB⑤读数R; 数据 1 加载DB;数据 2 加载CB;若需要,数据 3 写地址加载EAB;⑥执行X。
执行指令,写数据加载EB。
6、TMS320C54x 芯片的流水线冲突是怎样产生的?有哪些方法可以避免流水线冲突?答:’C54x 的流水线结构,允许多条指令同时利用CPU 的内部资源。
由于CPU 的资源有限,当多于一个流水线上的指令同时访问同一资源时,可能产生时序冲突。
数字信号处理(第四版)第9章数字信号处理的实现

第9章 数字信号处理的实现
2. 极点位置敏感度 下面分析系数量化误差对极零点位置的影响。如果 极零点位置改变了,严重时不仅IIR系统的频率响应会 发 生变化,还会影响系统的稳定性。因此研究极点位置 的 改变更加重要。为了表示系数量化对极点位置的影响,引 入极点位置灵敏度的概念,所谓极点灵敏度, 是指每 个极 点对系数偏差的敏感程度。相应的还有零点位置灵 敏度 ,分析方法相同。下面讨论系数量化对极点位置的 影响 。
就是量化后的数值。x可以是标量、向量和矩阵。将数取
整的方法有四舍五入取整、向上取整、向下取整、向零
取整,对应的MATLAB取整函数分别为 round(x)、
ceil(x)、floor(x)、fix(x)。round最常用,对应的MATLAB
量化语句为xq=q*round(x/q)。
第9章 数字信号处理的实现
解 求解本例的系数量化与绘图程序为ep911.m。
第9章 数字信号处理的实现
%ep911.m: 例题9.1.1 系数量化与图9.1.3绘图程序 B=1; A=[1, -0.17, 0.965];%量化前系统函数系数向量
b=4; Aq=quant(A, b);
进行b位量化
%量化2进制位数 %对系统函数分母系数向量A
p=roots(A) pq=roots(Aq) ap=abs(p) a pq=abs(pq) %以下为绘图部分省略
%计算量化前的极点 %计算量化后的极点 %计算量化前极点的模 %计算量化后极点的模
第9章 数字信号处理的实现
运行程序,得到量化后的系统函数
为
并求出H(z)和
的极点分别为
显然,因为系数的量化,使极点位置发生变化,算出极点
的模为: |p1, 2|=0.9823,
数字信号处理教程课后习题及答案

6.试判断:
是否是线性系统?并判断(2),(3)是否是移不变系统?
分析:利用定义来证明线性:满足可加性和比例性, T [a1 x1 (n ) + a 2 x2 (n )] = a1T [ x1 (n )] + a2T [ x2 (n )] 移不变性:输入与输出的移位应相同 T[x(n-m)]=y(n-m)。
,
(2)x(n) = R3(n)
,
(3)x(n) = δ (n − 2) ,
(4)x(n) = 2n u(−n − 1) ,
h(n) = R5(n) h(n) = R4 (n) h(n) = 0.5n R3(n) h(n) = 0.5n u(n)
分析:
①如果是因果序列 y (n ) 可表示成 y (n ) ={ y (0) , y(1) , y(2) ……},例如小题(2)为
y1 (1) = ay1 (0) + x1 (1) = 0 y1 (2) = ay1 (1) + x1 (2) = 0
┇
8
y1(n) = ay1(n − 1) + x1(n) = 0 ∴ y1 (n) = 0 , n ≥ 0 ii) 向 n < 0 处递推,将原方程加以变换
y1(n + 1) = ay1(n) + x1(n + 1)
结果 y (n ) 中变量是 n ,
∞
∞
∑ ∑ y (n ) =
x ( m )h (n − m ) =
h(m)x(n − m) ;
m = −∞
m = −∞
②分为四步 (1)翻褶( -m ),(2)移位( n ),(3)相乘,
数字信号处理知到章节答案智慧树2023年西安工程大学

数字信号处理知到章节测试答案智慧树2023年最新西安工程大学绪论单元测试1.请判断下面说法是否正确:为了有效地传播和利用信息,常常需要将信息转换成信号,因此信号是信息的载体,通过信号传递信息。
()参考答案:对2.请判断下面说法是否正确:模拟信号预处理的主要作用是滤除输入模拟信号中的无用频率成分和噪声,避免采样后发生频谱混叠失真。
()参考答案:对3.下列关于信号分类方式的选项正确的是()。
参考答案:按信号幅度的统计特性分类;按信号的维数分类;按信号自变量与参量的连续性分类4.下列不属于数字信号处理软件处理方法特点的选项是()。
参考答案:处理速度快5.下列关于数字系统处理精度描述正确的选项是()。
参考答案:精度由系统字长与算法决定第一章测试1.请判断下面说法是否正确:时域离散信号通过量化编码转换为数字信号,是一种无损变换。
( )参考答案:错2.下列信号是周期信号的有()。
参考答案:;;3.信号的最小周期是()。
参考答案:24.请判断下面说法是否正确:线性时不变时域离散系统具有线性性质和时不变特性。
()参考答案:对5.以下序列是系统的单位脉冲响应h(n),则是稳定系统的有()。
参考答案:;第二章测试1.请判断下面说法是否正确:时域离散信号和系统分析可以通过傅里叶变换和Z变换两种数学工具()。
参考答案:对2.请判断下面说法是否正确:周期序列的傅里叶变换以为周期,而且一个周期内只有N个冲激函数表示的谱线()。
参考答案:错3.实序列的傅里叶变换具有()。
参考答案:共轭对称性质4.已知序列,其Z变换和收敛域为()。
参考答案:;5.序列,其傅里叶变换为()。
参考答案:第三章测试1.在变换区间0≤n≤N-1内,序列的N点DFT在k=0的值为()。
参考答案:N2.在变换区间0≤n≤N-1内,序列的N点DFT的值为()参考答案:13.已知,求=()参考答案:1/N4.已知,求=()参考答案:5.已知,求=()参考答案:第四章测试1.请判断下面说法是否正确:模拟信号数字处理中,模拟信号与数字信号之间的相互转换中要求不能丢失有用信息()。
数字信号处理第三版课后答案丁玉美
7. 设线性时不变系统的单位脉冲响应h(n)和输入序列 x(n)如题7图所示, 要求画出y(n)输出的波形。
解: 解法(一)采用列表法。
y(n)=x(n)*h(n)= x(m)h(n-m) m
有以下三种情况, 分别求出输出y(n)。
(1) h(n)=R4(n), x(n)=R5(n) (2) h(n)=2R4(n), x(n)=δ(n)-δ(n-2) (3) h(n)=0.5nu(n), xn=R5(n)
解: (1) y(n)=x(n)*h(n)=
R4(m)R5(n-m)
m
先确定求和域。 由R4(m)和R5(n-m)确定y(n)对于m的 非零区间如下:
(5)y(n)=x2(n)
(6)y(n)=x(n2)
n
(7)y(n)= x(m) m0
(8)y(n)=x(n)sin(ωn)
解: (1) 令输入为
输出为
x(n-n0)
y′(n)=x(n-n0)+2x(n-n0-1)+3x(n-n0-2) y(n-n0)=x(n-n0)+2x(n—n0—1)+3(n-n0-2)
由于
x(n)=-δ(n+2)+δ(n-1)+2δ(n-3) 1
h(n)=2δ(n)+δ(n-1)+ δ2(n-2)
x(n)*δ(n)=x(n)
x(n)*Aδ(n-k)=Ax(n-k)
故
第 1 章 时域离散信号和时域离散系统
y(n)=x(n)*h(n)
=x(n)*[2δ(n)+δ(n-1)+ δ1(n-2) 2
数字信号处理(第三版)-课后习题答案全-(原题+答案+图)
将x(n)的表示式代入上式, 得到 1 y(n)=-2δ(n+2)-δ(n+1)-0.5δ(2n)+2δ(n-1)+δ(n-2)
+4.5δ(n-3)+2δ(n-4)+δ(n-5)
第 1 章 时域离散信号和时域离散系统
8. 设线性时不变系统的单位脉冲响应h(n)和输入x(n)分别有以下三种情况,
第 1 章 时域离散信号和时域离散系统
(3) 这是一个延时器, 延时器是线性非时变系统, 下面证明。 令输入为
输出为
x(n-n1)
y′(n)=x(n-n1-n0) y(n-n1)=x(n-n1-n0)=y′(n) 故延时器是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n-n0)+bx2(n-n0) =aT[x1(n)]+bT[x2(n)]
(5)y(n)=x2(n)
(6)y(n)=x(n2)
(7)y(n)=
n
(8)y(n)=x(n)sin(ωxn(m) )
m0
解: (1) 令输入为
输出为
x(n-n0)
y′(n)=x(n-n0)+2x(n-n0-1)+3x(n-n0-2) y(n-n0)=x(n-n0)+2x(n—n0—1)+3(n-n0-2)
x(m)h(n-m)
m
第 1 章 时域离散信号和时域离散系统
题7图
第 1 章 时域离散信号和时域离散系统
y(n)={-2,-1,-0.5, 2, 1, 4.5, 2, 1; n=-2, -1, 0, 1, 2, 3, 4, 5}
数字信号处理DSP9-2
p
E e n R e n 1
2 p 1 p p 1 2
E e n p
E e n 1 R e n
2 p 1 p p 1 2
优化条件
2 2 E e p n E e p n 0 R p
一维卡尔曼滤波
设含有噪声的信号测量值与信号估计值分 别采用以下模型表达:
xn c sn wn sn a sn 1 vn 1
a, c 为与时间无关的常数; w, v 为方差不随时间变化的白噪声。
一维卡尔曼滤波
建立一维卡尔曼方程如下:
sn an sn 1 bn xn
格型滤波
例:3阶系统
1 0.5 z 1 0.5 z 2 z 3 H z 1 1.8 z 1 1.4 z 2 0.4 z 3
c3 b3 3 1 c2 b3 2 c3a3 1 1.3 c1 b3 1 c2 a2 1 c3a3 2 1 c0 b3 0 c1a1 1 c2 a2 2 c3a3 3 0.8
k 1 p 1
格型滤波
P阶后向预测
P阶前向预测
格型滤波
误差递推关系与格型滤波结构
e n e 1 n R p e 1 n Fra bibliotek 1 p p p
e n e 1 n 1 R p e 1 n p p p
格型滤波
最小均方优化设计: 选择反射系数使前后向均方误差之和为最小 前向均方误差 后向均方误差
n p p 1 2 p 1 2 N 1
R p N 1
n p
e n e n 1
格型滤波
《数字信号处理》第三版课后习题答案
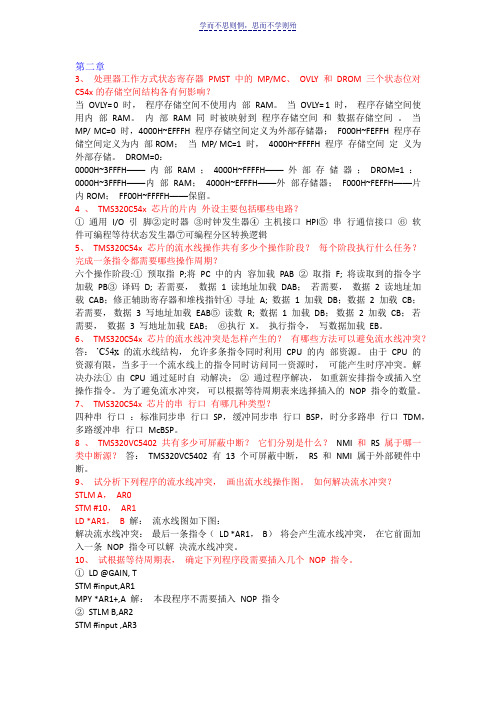
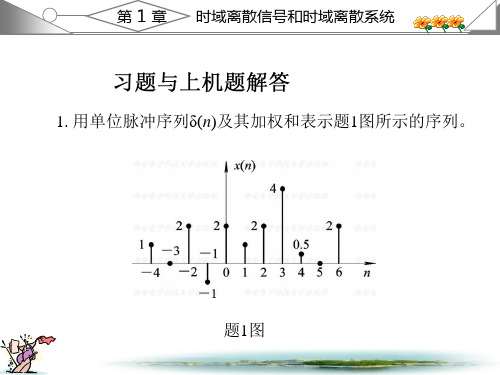
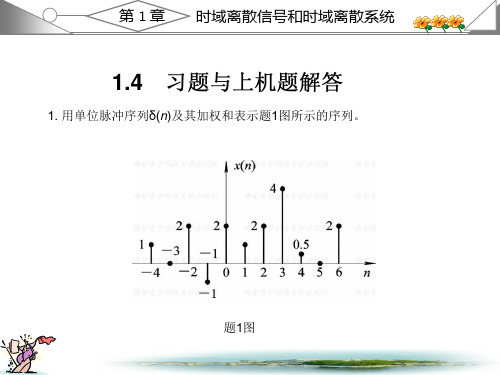
《数字信号处理》第三版课后习题答案数字信号处理课后答案1.2 教材第一章习题解答1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。
解:()(4)2(2)(1)2()(1)2(2)4(3)0.5(4)2(6)x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+-2. 给定信号:25,41()6,040,n n x n n +-≤≤-??=≤≤其它(1)画出()x n 序列的波形,标上各序列的值;(2)试用延迟单位脉冲序列及其加权和表示()x n 序列;(3)令1()2(2)x n x n =-,试画出1()x n 波形;(4)令2()2(2)x n x n =+,试画出2()x n 波形;(5)令3()2(2)x n x n =-,试画出3()x n 波形。
解:(1)x(n)的波形如题2解图(一)所示。
(2)()3(4)(3)(2)3(1)6()6(1)6(2)6(3)6(4)x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+-(3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。
(4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。
(5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。
3. 判断下面的序列是否是周期的,若是周期的,确定其周期。
(1)3()cos()78x n A n ππ=-,A 是常数;(2)1()8()j n x n e π-=。
解:(1)3214,73w w ππ==,这是有理数,因此是周期序列,周期是T=14;(2)12,168w wππ==,这是无理数,因此是非周期序列。
5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。
数字信号处理习题及答案解析

==============================绪论==============================1. A/D 8bit 5V 00000000 0V 00000001 20mV 00000010 40mV 00011101 29mV==================第一章 时域离散时间信号与系统==================1.①写出图示序列的表达式答:3)1.5δ(n 2)2δ(n 1)δ(n 2δ(n)1)δ(n x(n)-+---+++= ②用δ(n) 表示y (n )={2,7,19,28,29,15}2. ①求下列周期)54sin()8sin()4()51cos()3()54sin()2()8sin()1(n n n n n ππππ-②判断下面的序列是否是周期的; 若是周期的, 确定其周期。
(1)A是常数 8ππn 73Acos x(n)⎪⎪⎭⎫ ⎝⎛-= (2))81(j e )(π-=n n x 解: (1) 因为ω=73π, 所以314π2=ω, 这是有理数, 因此是周期序列, 周期T =14。
(2) 因为ω=81, 所以ωπ2=16π, 这是无理数, 因此是非周期序列。
③序列)Acos(nw x(n)0ϕ+=是周期序列的条件是是有理数2π/w 0。
3.加法乘法序列{2,3,2,1}与序列{2,3,5,2,1}相加为__{4,6,7,3,1}__,相乘为___{4,9,10,2} 。
移位翻转:①已知x(n)波形,画出x(-n)的波形图。
②尺度变换:已知x(n)波形,画出x(2n)及x(n/2)波形图。
卷积和:①h(n)*求x(n),其他02n 0n 3,h(n)其他03n 0n/2设x(n) 例、⎩⎨⎧≤≤-=⎩⎨⎧≤≤= }23,4,7,4,23{0,h(n)*答案:x(n)=②已知x (n )={1,2,4,3},h (n )={2,3,5}, 求y (n )=x (n )*h (n )x (m )={1,2,4,3},h (m )={2,3,5},则h (-m )={5,3,2}(Step1:翻转)解得y (n )={2,7,19,28,29,15}③(n)x *(n)x 3),求x(n)u(n u(n)x 2),2δ(n 1)3δ(n δ(n)2、已知x 2121=--=-+-+=}{1,4,6,5,2答案:x(n)=4.如果输入信号为,求下述系统的输出信号。
《数字信号处理》第三版答案(非常详细完整)

答案很详细,考试前或者平时作业的时候可以好好研究,祝各位考试成功!!电子科技大学微电子与固体电子学陈钢教授著数字信号处理课后答案1.2 教材第一章习题解答1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。
解:()(4)2(2)(1)2()(1)2(2)4(3)0.5(4)2(6)x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+-2. 给定信号:25,41()6,040,n n x n n +-≤≤-⎧⎪=≤≤⎨⎪⎩其它(1)画出()x n 序列的波形,标上各序列的值;(2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。
解:(1)x(n)的波形如题2解图(一)所示。
(2)()3(4)(3)(2)3(1)6()6(1)6(2)6(3)6(4)x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+-(3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。
(4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。
(5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。
(1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n =; (7)0()()nm y n x m ==∑。
数字信号处理课后习题答案(全)1-7章PPT课件

第 1 章 时域离散信号和时域离散系统
(2) 令输入为
输出为
x(n-n0)
y′(n)=2x(n-n0)+3 y(n-n0)=2x(n-n0)+3=y′(n) 故该系统是非时变的。 由于
T[ax1(n)+bx2(n)]=2ax1(n)+2bx2(n)+3 T[ax1(n)]=2ax1(n)+3 T[bx2(n)]=2bx2(n)+3 T[ax1(n)+bx2(n)]≠aT[x1(n)]+bT[x2(n)] 故该系统是非线性系统。
T[ax1(n)+bx2(n)]=ax1(n) sin(ωn)+bx2(n) sin(ωn) =aT[x1(n)]+bT[x2(n)]
故系统是线性系统。
第 1 章 时域离散信号和时域离散系统
6. 给定下述系统的差分方程, 试判定系统是否是因果稳定系统, 并说明 理由。
(1) y(n)=
1 x(Nn-1 k)
第 1 章 时域离散信号和时域离散系统
(3) 这是一个延时器, 延时器是线性非时变系统, 下面证明。 令输入为
输出为
x(n-n1)
y′(n)=x(n-n1-n0) y(n-n1)=x(n-n1-n0)=y′(n) 故延时器是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n-n0)+bx2(n-n0) =aT[x1(n)]+bT[x2(n)]
因此系统是非线性系统。
第 1 章 时域离散信号和时域离散系统
(6) y(n)=x(n2)
数字信号处理第9章答案讲解

(3) 画出数字滤波器的直接型结构图。
(该题15分, (1) 5分, (2) 5分, (3) 5
(自测时间2.5~3小时, 满分100分)
第9章 自 测 题
9.2 自 测 题(二)
1. 假设x(n)=δ(n)+δ(n-1), 完成下列各题: (1)求出x(n)的傅里叶变换X(ejω), 并画出它的幅频特性 曲线; (2) 求出x(n)的离散傅里叶变换X(k), 变换区间的长度 N=4, 并画出|X(k)|~k曲线;
(该题10分)
第9章 自 测 题
4. 已知
1 x(n) 0
n≤ 3 其它n
(1)求出该信号的傅里叶变换; (2)利用x(n)求出该信号的DFT, X(k)=DFT[x(n)], 区间为8。 (提示: 注意x(n)的区间不符合DFT要求的区间。) (该题8分, 每小题4分)
第9章 自 测 题
X(z)=ZT[x(n)]
则X(z)的收敛域为
a<|z|<a-1
() ()
第9章 自 测 题
(5) 令x(n)=a|n| 0<|a|<1, -∞≤n≤∞
X(ejω)=FT{x(n)]
则
π X (e j )d 2πx(n) π
(
)
(6) 假设一个稳定的IIR滤波器的系统函数和单位脉冲响应 分别用H(z)和h(n)表示, 令
第9章 自 测 题
(2) 用窗函数法设计FIR数字滤波器时, 加大窗函数 的
长度可以同时加大阻带衰减和减少过渡带的宽度。 ( )
(3)如果系统函数用下
1 0.5z 1 )(1
0.5z)
可以通过选择适当的收敛域使该系统因果稳定。
(4)令x(n)=a|n| 0<|a|<1, -∞≤n≤∞
数字信号处理考试问题及答案

第1章 引 言1、数字信号处理的含义?数字信号处理—-Digital Signal Processing 采用数字技术的方式进行信号处理。
将信号转化为数字信号,利用数字系统进行处理。
2、什么是信号?信号主要采用什么方式表达? 传递信息的载体:进行变化的物理量;与日常生活密切相关: 语言、音乐、图片、影视模拟信号的表达:在电子技术中,通过传感器将信号转化为随时间连续变化的电压:模拟电压信号数字信号的表达:对模拟电压进行等间隔测量,将各测量值采用有限精度的数值表达,体现为顺序排布的数字序列。
3 、什么是模拟信号?什么是数字信号?信号在时间和数值上都是连续变化的信号称为模拟信号.模拟信号是指用连续变化的物理量表示的信息,其信号的幅度,或频率,或相位随时间作连续变化 数字信号指幅度的取值是离散的,幅值表示被限制在有限个数值之内。
时间和幅度上都是离散(量化)的信号。
二进制码就是一种数字信号。
二进制码受噪声的影响小,易于有数字电路进行处理,所以得到了广泛的应用。
4 、数字信号具有什么特点?信号采用抽象数字序列表达,与物理量没有直接关系,在传输、保存和处理过程中,信号精度不受环境因素影响,抗干扰性强.信号采用数字序列表达后,对模拟信号难以进行的很多处理能够方便地实现,例如:大规模长时间的信号存储、对信号的乘法调制和各种编码调制、信号的时间顺序处理、信号的时间压缩/扩张、复杂标准信号的产生。
5 、数字信号处理具有什么意义?数字信号处理是研究如何用数字或符号序列来表示信号以及对这些序列作处理的一门学科。
它具有精度高、可靠性高、灵活性、便于大规模集成化等特点。
6 、列举一些在生活中常见的数字技术的应用。
商业摄影领域;录音电话机;数码相机;数字电视;MP3播放器等等。
第2章信号的数字化1、信号数字化需要经过哪些基本步骤?信号数字化可以分为三步:1)等距采样,实现信号离散化;2)数值量化,用有限精度表达采样值;3) AD 转换,对量化值进行二进制编码。
《数字信号处理》第三版答案(非常详细完整)
答案很详细,考试前或者平时作业的时候可以好好研究,祝各位考试成功!!电子科技大学微电子与固体电子学陈钢教授著数字信号处理课后答案1.2 教材第一章习题解答1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。
解:()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6)x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+-2. 给定信号:25,41()6,040,n n x n n +-≤≤-⎧⎪=≤≤⎨⎪⎩其它(1)画出()x n 序列的波形,标上各序列的值;(2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。
解:(1)x(n)的波形如题2解图(一)所示。
(2)()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4)x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+-(3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。
(4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。
(5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。
(1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n =; (7)0()()nm y n x m ==∑。
数字信号处理 第九章 图像分析与识别基础

9.1.2 特征分析模式
特征分析模式是根据景物特征实现视觉再现 的理论,其过程为提取特征、特征分类、 分析与识别几个步骤。 需要较大的特征运算。难度在于:1)如何对 于不同的对象选择适合的特征;2)如何确 定各特征之间的关系。
9.1.3 结构描述模式
结构描述模式通常用“图”表示,“图”的 节点代表对象景物的某一部分或某一特性; 节点之间的有向边说明各部分或个特性之 间的关系。
l(x,y)
l(x,y)
9.2.2 边缘检测法
5 Kirsch边缘检测算子
g ( x , y ) max
5 3 3
3 3 5
f ( x , y ) g i ( x , y ), i
5 0 3 3 0 5 5 5 3 3 3 3 3 3 3 5 5 5 3 0 3 3 0 3 5 5 5 3 3 3
9.1 视觉再认模式
本节主要从心理学的角度分析视觉对景物的 再认模式,以便从更深的层次理解图像分 析与识别方法的原理。视觉再认模式主要 有以下四种: 9.1.1 模板匹配模式 9.1.2 特征分析模式 9.1.3 结构描述模式 9.1.4 傅立叶模式
9.1.1 模板匹配模式
随着经验和阅历的增长,人的记忆中存在着代 表各种景物形态的“模版”,当人注视某景 物时,大脑神经中枢就会搜索存储在大脑中 的各个模版,并与看到的景物进行匹配,一 旦匹配一致或相关性最大,则认为再认成功。 模版匹配模式可以看作是一个决策过程。
第9章
图像分析与识别基础
概述
图像分析(image analysis)也叫景物分析(scenery analysis)或图像理解(image understand),其目 的是从图像中提取有用测度(useful estimate)、 数据或信息,生成非图的描述或表示,如数值、 符号等等,不局限于对给定景物的区域在一定数 目的已知类别里进行分类,更重要是要对千变万 化和难以预测的复杂景物加以描述,从中找出潜 藏在景物图像中的深层次信息,涉及到物体的前 景与背景、物体之间的关系以及人工智能技术等 问题。其研究的内容包括特征提取、符号描述、 景物匹配和识别等等。
9第九章数字信号处理中的有限字长效应
两极点对a2变化的灵敏度为
z1 1 1 3.3333e j90 a2 z1 z2 j0.3 z2 1 1 3.3333e j90 a2 z2 z1 j0.3
可以看出a2对两极点的大小影响是相同的。只考虑大 小时用绝对值表示,有
z2
z2 a2
a2
因此
a2
z2 z2 / a2
极点从原来的单位圆内迁移到单位圆上,从而产生 等幅序列形式的极限环震荡。
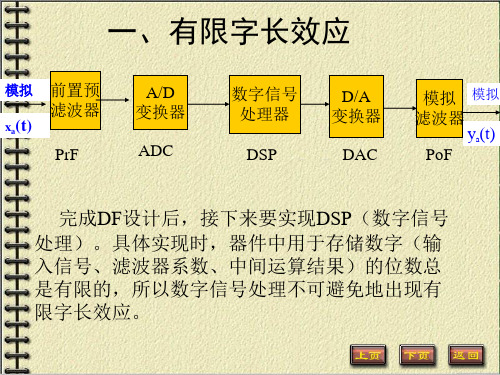
总结
由于存储数字的位数总是有限的,所以数字信 号处理不可避免地出现有限字长效应。
有限字长效应引入的误差:
1. 输入信号的量化误差 2. 系数的量化误差 3. 运算过程中的运算误差。
请通过实验深入领会有限字长效应引入的误差。
0.0373 z1 0.745
z
2
1
0.0373 a1z 1 a2
z
2
利用a2变化造成的极点灵敏度,为保持极点在其正常 值的0.5%内变化,试确定所需要的最小字长。
解: 令H(z)的分母为零,11.7z1 0.745z2 0
求得极点为 z1 0.85 j0.15, z2 0.85 j0.15
IIR DF 的极限环振荡
由于字长有限,IIR DF零输入下也有固定不变 的输出,或输出在一定范围内出现震荡现象。
产生极限环震荡的原因 量化使下式成立
y[k] y[k 1] x[k]
Q[ y[k 1]] y[k 1] ( 0取, 0取)
即系统的差分方程变为
y[k] x[k] y[k 1]
2.有限字长效应
在量化和运算过程中,由于有限字长必然产 生误差。
这些误差给数字信号处理的实现精度 和滤波器稳定性带来不良影响,称为有限字
《数字信号处理》第三版高西全版课后习题答案详解
数字信号处理课后答案 高西全、丁美玉版1.2 教材第一章习题解答1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。
解:()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6)x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+-2. 给定信号:25,41()6,040,n n x n n +-≤≤-⎧⎪=≤≤⎨⎪⎩其它(1)画出()x n 序列的波形,标上各序列的值;(2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。
解:(1)x(n)的波形如题2解图(一)所示。
(2)()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4)x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+-(3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。
(4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。
(5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。
3. 判断下面的序列是否是周期的,若是周期的,确定其周期。
(1)3()cos()78x n A n ππ=-,A 是常数;(2)1()8()j n x n e π-=。
解:(1)3214,73w w ππ==,这是有理数,因此是周期序列,周期是T=14; (2)12,168w wππ==,这是无理数,因此是非周期序列。
5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。
数字信号处理 第九章答案

9.2、对于下面各组峰波纹值p δ和s δ,求出相应的峰值通带波纹p α和最小阻带衰减s α。
(a ),08.0,04.0==s p δδ(b ),04.0,015.0==s p δδ解:)lg(20)1lg(20s s p p δαδα-=--=(a )dB dB dBdB s p 94.21)08.0lg(2035.0)04.01lg(20=-==--=αα(b ) dB dB dBdB s p 96.27)04.0lg(2031.1)015.01lg(20=-==--=αα9.11、下面的因果IIR 数字传输函数式用式(9.14)的双线性变换法在T=0.4时设计得到,求出它们各自的原因过模拟传输函数。
(a ),6410)2(4)(22++-+=z z z z z G a (b ))8412)(13(8122218)(223+-++++=z z z z z z z G b 解:S S S T S T z 2.012.012121-+=-+= 222.012.0112.04508.02.1)()(s s s s z G s G s s z a a ++-==-+= 324.624.2192.0304792.0)()(2322.012.01+-+++==-+=s s s s s z G s G ssz b b 9.13、一个IIR 低通数字滤波器具有归一化的通带边界频率πω45.0=。
在T=0.4ms 时,若利用冲激不变发来设计数字滤波器,则原型模拟低通滤波器的通带边界频率是多少赫兹?在T=0.4ms 时,若利用双线性变换法来设计数字滤波器,则模拟低通原型滤波器的通带边界频率是多少赫兹?解: ○2利用双线性变换法来设计数字滤波器,则模拟低通原型滤波器的通带边界频率Hz F F TF p p p P 5.562104.0245.023=⨯⨯==-πππω。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 9 章
自
测
题
6. 设H(ejω)是因果线性时不变系统的传输函数, 它的单
位脉冲响应是实序列。 已知H(ejω)的实部为
5
H
R (e
j
)
n0
0 , 5 cos n
n
求系统的单位脉冲响应h(n)。 (该题8分)
第 9 章
自
测
题
7. 假设网络系统函数为
H (z) 1 z
1 1
(2)令yc(n)=x(n) * y(n), 圆卷积的长度L=8, 求yc(n)。
要求写出yc(n)的表达式, 并画出yc(n)的波形。 (该题8分, 每小题4分)
第 9 章
自
测
题
3.
x 设数字网络的输入是以N为周期的周期序列 ~ ( n ) ,
该网络的单位脉冲响应是长度为M的h(n), 试用FFT计算该 网络的输出。 要求画出计算框图(FFT作为一个框图), 并注明FFT的计算区间。 (该题10分)
第 9 章
自
测
题
第9章 自 测 题
9.1 9.2 9.3 9.4 9.5 9.6 9.7 9.8 9.9 9.10 自测题(一) 自测题(二) 自测题(三) 自测题(四) 自测题(五) 自测题(一)参考答案 自测题(二)参考答案 自测题(三)参考答案 自测题(四)参考答案 自测题(五)参考答案
第 9 章
第 9 章
自
测
题
5. 已知归一化二阶巴特沃斯低通滤波器的传输函数为
H a (s) 1 s
2
2s 1
要求用双线性变换法设计一个二阶巴特沃斯数字低通滤波器, 该滤波器的3 dB截止频率 间隔T=2 s。
rad, c
3 π
为简单起见, 设采样
第 9 章
自
测
题
(1)求出该数字低通滤波器的系统函数H(z);
(该题25分, (1)4分 , (2)7分, (3)7分, (4)7分)
3. 对x(t)进行理想采样, 采样间隔T=0.25 s, 得到 x ( t ) , ˆ
ˆ 再让 x ( t ) 通过理想低通滤波器G(jΩ), Gj(Ω)用下式表示:
0 . 25 G ( j ) 0
滤波器? 为什么?
(该题21分, (1)15分, (2)6分) (自测时间2.5~3小时, 满分100分)
第 9 章
自
测
题
题9图
第 9 章
自
测
题
9.4 自 测 题 (四)
1. 设
X (z) 0 . 19 (1 0 . 9 z )( 1 0 . 9 z
1
)
试求与X(z)对应的所有可能的序列x(n)。 (该题12分) 2. 假设x(n)=R8(n), h(n)=R4(n)。 (1)令y(n)=x(n)*h(n), 求y(n)。 要求写出y(n)的表达式, 并画出y(n)的波形。
(2)判断该滤波器是否具有线性相位特性, 如果具
有线性相位特性, 写出相位特性公式。 (该题11分, (1)6分, (2)5分)
第 9 章
自
测
题
4. 已知因果序列x(n)={1, 2, 3, 1, 0, -3,
X(ejω)=FT[x(n)]
X (e
j k
-2}, 设
) X (e
j
)
k
h(n)=R8(n), x(n)=0.5nR8(n) (1) 计算并图示该系统的输出信号y(n);
第 9 章
自
测
题
(2) 如果对x(n)和 h(n)分别进行16点DFT, 得到X(k)和
H(k), 令
Y1(k)=H(k)X(k) 画出y1(n)的波形。 (3)画出用快速卷积法计算该系统输出y(n)的计算框图 k=0, 1, 2, 3, …, 15 n, k=0, 1, 2, 3, …, 15
X (k ) N 2 N 2 0 其它 k (1 j) (1 j) k m k N m
k=0, 1, 2, 3, …, 7
(
)
第 9 章
自
测
题
(2) 用窗函数法设计FIR数字滤波器时, 加大窗函数 的
长度可以同时加大阻带衰减和减少过渡带的宽度。
(3)如果系统函数用下式表示:
H (z) 1 (1 0 . 5 z
1
(
)
)( 1 0 . 5 z )
可以通过选择适当的收敛域使该系统因果稳定。
(自测时间2.5~3小时, 满分100分)
第 9 章
自
测
题
9.2 自 测 题(二)
1. 假设x(n)=δ(n)+δ(n-1), 完成下列各题: (1)求出x(n)的傅里叶变换X(ejω), 并画出它的幅频特性 曲线; (2) 求出x(n)的离散傅里叶变换X(k), 变换区间的长度 N=4, 并画出|X(k)|~k曲线; ~ (3) 将x(n)以4为周期进行延拓, 得到周期序列 x ( n ) , ~ ~ ~ (n) x X ( k ) ~ k 曲线; 求出 的离散傅里叶级数系数X ( k ), 并画出 (4) 求出(3)中 ~ ( n )的傅里叶变换表示式X(ejω), 并 x 画出|X(ejω)|~ω曲线。 (该题24分, 每小题6分)
第 9 章
自
测
题
9.3 自 测 题 (三)
1. 设
X (z) 0 . 36 (1 0 . 8 z )( 1 0 . 8 z
1
)
试求与X(z)对应的因果序列x(n)。 (该题7分)
第 9 章
自
测
题
2. 因果线性时不变系统用下面差分方程描述:
1 y (n) x(n k ) k 0 2
(该题18分, 每小题6分)
题3图
第 9 章
自
测
题
4. 设FIR数字滤波器的单位脉冲响应为 h(n)=2δ(n)+δ(n-1)+δ(n-3)+2δ(n-4)
(1)试画出直接型结构(要求用的乘法器个数最少);
(2)试画出频率采样型结构, 采样点数为N=5; 为简单 起见, 结构中可以使用复数乘法器; 要求写出每个乘法器系 数的计算公式; (3) 该滤波器是否具有线性相位特性, 为什么? (该题21分, 每小题7分)
第 9 章
自
测
题
题8图
第 9 章
自
测
题
9. 已知RC模拟滤波网络如题9图所示。
(1)试利用双线性变换法将该模拟滤波器转换成数字滤
波器, 求出该数字滤波器的系统函数, 并画出它的结构图。 最后分析该数字滤波器的频率特性相对原模拟滤波器的频率特 性是否有失真。 (2) 能否用脉冲响应不变法将该模拟滤波器转换成数字
y1(n)=IDFT[Y(k)]
(FFT计算作为一个框图), 并注明FFT的最小计算区间N
等于多少。 (该题22分, (1) 7分, (2) 7分, (3) 8分)
第 9 章
自
测
题
5. 二阶归一化低通巴特沃斯模拟滤波器的系统函数为
H a (s) 1 s
2
2s 1
采样间隔T=2 s, 为简单起见, 令3 dB截止频率Ωc=1 rad/s, 用 双线性变换法将该模拟滤波器转换成数字滤波器H(z), 要求: (1) 求出H(z); (2) 计算数字滤波器的3 dB截止频率; (3) 画出数字滤波器的直接型结构图。 (该题15分, (1) 5分, (2) 5分, (3) 5分)
k
j k
2π 5
k ; k 0 ,1, 2 , 3 , 4
y ( n ) IDFT [ X ( e
)]
n , k 0 ,1, 2 , 3 , 4
试写出y(n)与x(n)之间的关系式, 并画出y(n)的波形图。 (该题14分)
第 9 章
自
测
题
5. 已知x(n)是实序列, 其8点DFT的前5点值为: {0.25, 0.125-j0.3, 0, 0.125-j0.06, 0.5}, (1) 写出x(n)8点DFT的后3点值; (2) 如果x1(n)=x((n+2))8R8(n), 求出x1(n)的8点DFT值。 (该题14分, 每小题7分)
4 k
1 3 y (n k ) k 1
5
k
试画出该系统的直接型结构图。 (该题7分)
第 9 章
自
测
题
3. 如果FIR网络用下面差分方程描述:
1 y (n) k 0 2
6 3 k
x(n k )
(1)画出直接型结构图, 要求使用的乘法器最少;
自
测
题
则
h(n)=hN(n)
(该题24分, 每小题4分) 2. 完成下列各题:
H (z) 3z 2 5z
1 1
(
)
(1)已知
2z
2
设H(z)是一个因果系统, 求它的单位脉冲响应h(n)。 (2) 设 a n n≥ 0
x(n) 1 n 0 , | a | 1
(6) 假设一个稳定的IIR滤波器的系统函数和单位脉冲响应 分别用H(z)和h(n)表示, 令
H (k ) H ( z )
ze
j k
k
2π N
k ; k 0 ,1, 2 , 3 , , N 1
hN(n)=IDFT[H(k)]
n, k=0, 1, 2, 3, …, N-1
第 9 章
(
)
(4)令x(n, -∞≤n≤∞
X(z)=ZT[x(n)] a<|z|<a-1 ( )