DELTA CP2000培训教程
DELTA CP2000 说明书

D1*:二阶固定
See Detail B Detail A (Mounting Hole)
Detail B (Mounting Hole)
框号 B
W
190.0 [7.48]
H
320.0 [12.60]
D
190.0 [7.48]
W1
173.0 [6.81]
H1
303.0 [11.93]
D1*
77.9 [3.07]
濟南 : 0531-8690-7277 武漢 : 027-8544-8265
廣州 : 020-3879-2175
南昌 : 0791-6255-010 西安 : 029-8836-0640
哈爾濱 : 0451-5366-0643 南京 : 025-8334-6585 廈門 : 0592-5313-601
到电解电容器不通电存放时,当环境温度过高,其特性易劣化。请勿在无通电的状态 下放置一年以上。
NOTE
产品文件有更新或修改内容时,可至台达电子工业自动化类产品下载最新版本。
( /industrialautomation/ )
当内文叙述有提及驱动器或驱动器文字叙述,皆意指交流马达驱动器。
更改 Pr08-11 中文参数名称为 苏醒参考点 更改 Pr08-11 的设定范围为 0.00~600.00Hz 或
增加参数 Pr08-18: 睡眠模式设定
增加参数 Pr08-19: 驱动器苏醒时积分量的上限
增加 Pr02-57: 外/内部端子 增加 Pr02-58: 内部端子设定值
增加 Pr05-07: IM 电机 1 参数 Rr (转子电阻) 增加 Pr05-08: IM 电机 1 参数 Lm (磁通互感量)
I
DELTA dvp-02hc高速计数器模块 使用说明

外部電源 D C 24 V
外部電源 D C 12 V to 24 V
若使用 NPN 輸出型的編碼器 (Encoder),請注意與 02HC 模塊輸入端配線之極性
2.2
產品外觀及各部介紹 3 3.1
計數長度 0 CH0_CR#5,4 CH1_CR#7,6
02HC 開機啟動電流 IPEAK=0.8A,一般工作電流 IMAX=0.2A (電源輸入電壓設定為 +24V)
項 目
格 式
1 相輸入 1 輸入 2 輸入 1 倍頻
2 相 (A, B) 輸入 2 倍頻 4 倍頻
上數及下數 (AB 相 (2 相輸入 )、正轉脈沖 /反轉脈沖 (1 相 2 輸入 )及計數脈沖 /方向 (1 相 1 輸 入 )等三種計數模式 32-bit 模式: -2,147,483648~+2,147,483,647 16-bit 模式: 0~65,536 (上限值可設定 CH0_CR#4,5、 CH1_CR#6,7) 兩種比較值可作設定,CH0 對應輸出點 YH0 及 CH1 對應輸出點 YH1,當計數值=設定值時, 該輸出點導通。採用硬件電路比較及輸出設定,均為即時處理 YH0+:輸出點 YH0,晶體管集極 (Collector)
02HC- H0T4350001
B相
OUT
OB
隔離 線
4 .7 K
ψB1 S/S1
型號及序號說明
型號 序號
+2 4V
Z相
OUT
PRE SET
隔離 線
PRE1 S/S1
4 .7 K
CO M E
DISAB LE 隔離 線
4 .7 K
DIS1 S/S1
START
CP2000实用操作方法
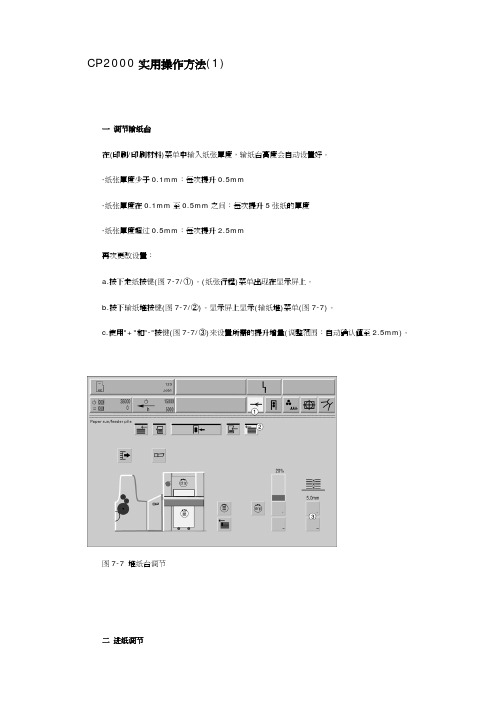
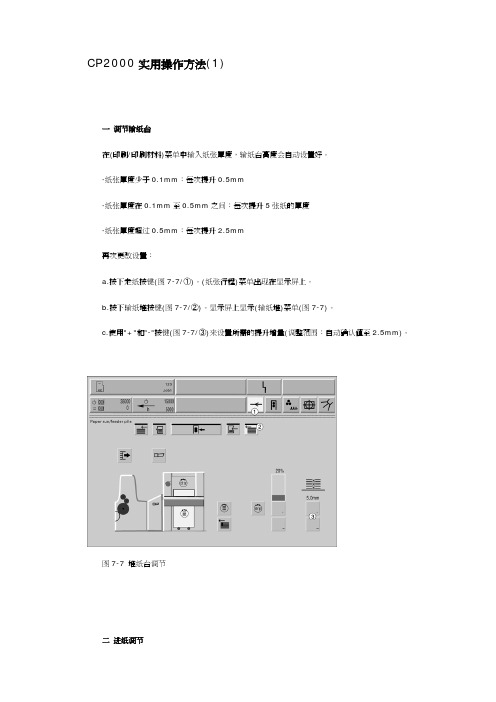
CP2000实用操作方法(1)一调节输纸台在(印刷/印刷材料)菜单中输入纸张厚度,输纸台高度会自动设置好。
·纸张厚度少于0.1mm:每次提升0.5mm·纸张厚度在0.1mm至0.5mm之间:每次提升5张纸的厚度·纸张厚度超过0.5mm:每次提升2.5mm再次更改设置:a.按下走纸按键(图7-7/①)。
(纸张行程)菜单出现在显示屏上。
b.按下输纸堆按键(图7-7/②)。
显示屏上显示(输纸堆)菜单(图7-7)。
c.使用"+"和"-"按键(图7-7/③)来设置所需的提升增量(调整范围:自动确认值至2.5mm)。
图7-7堆纸台调节二进纸调节1.斜张控制自动控制打开电源后。
斜张控制自动设置为自动模式。
通过图7-8的显示屏可切换自动控制和手动控制(建议:打开所有自动操作a.按下走纸按键(图7-8/①)。
(走纸)菜单出现在显示屏上。
b.按下输纸按键(图7-8/②)。
输纸菜单出现。
c.打开或关闭纸张到达(图7-8/④)或斜张(图7-8/③)自动控制装置。
图7-8纸张到达前规的调节d.手动调节使用箭头键调节到纸和斜张校正至适宜数值。
尽量保持盖板的笔直。
调整范围:±10mm。
2.纸张校正打开电源后,纸张校正默认为自动操作。
纸张校正自动操作装置a.按下走纸按键(图7-9/①)。
显示屏上出现(走纸)菜单。
b.按下输纸堆按键(图7-9/②)〉(纸堆)菜单出现在显示屏(图7-9)。
c.按下按键,打开或关闭纸张校正自动操作(图7-9/③)。
如果手动操作纸张校正。
则使用控制台上的控制箭头移动主纸堆和副纸堆。
图7-9纸张自动校正三吹风的设置1.吸纸头吹风的设置在机器预设时吹风会自动调整好。
在此设置值是可以更改的。
打开/关闭速度补偿打开:随着速度的增加吹风量也会增加。
关闭:吹风量保持不变。
a.按下走纸按键(图7-10/①)。
b.按下输纸堆按键(图7-10/②)。
DELTA CP2000无感侧向量控制变频器 说明书
無感測向量控制變頻器For HVAC Drive Application使用手冊50126040012011-08CPT1使用之前在操作本產品前,請先詳細閱讀並注意相關安全訊息,確保自身安全及產品安全。
產品文件有更新或修改內容時,可至台達電子工業自動化類產品下載最新版本。
( /industrialautomation/ )⏹當內文敘述有提及驅動器或驅動器文字敘述,皆意指交流馬達驅動器。
目錄00 目錄………………………………………………………………………………………………0-101 產品裝置…………………………………………………………………………………………...1-102 檢查&建議…………………………………………………………………………………..……2-103 搬運……………………………………………………………………………………….……..…3-104 接線方式……………………………………………………………………………………….…4-105 主回路端子…………………………………………………………………………………….…5-106 控制回路端子…………………………………………………………………………………….6-107 配件選購……………………………………………………………………………………….…7-108 配件卡………………………………………………………………………………………...…..8-109 規格表………………………………………………………………………………………..….9-110 數位操作器使用說明…………………………………………………………………………10-111 參數一覽表……………………………………………………………………………………11-112 參數詳細說明…………………………………………………………………………………12-113 成功應用範例………………………………………………………………………………13-114 警告顯示碼說明………………………………………………………………………………14-115 故障顯示碼說明………………………………………………………………………………15-116 CANopen通訊簡介………………………………………………………………………………16-117 PLC 功能應用………………………………………………………………………………17-118 BACnet使用介紹及步驟…………………………………………………………………………18-119 PT100操作說明…………………………………………………………………………..19-1當您需要和本產品的技術人員連絡時, 請告知技術人員這個使用手冊以及韌體(firmware)的版本Issue Edition手冊版本: 01Firmware Version韌體版本: 1.01Keypad Verson: 1.011Issue date發行日期: August 2011改版歷程日期手冊版本韌體版本修改摘要2011/08 01 1.01 增加參數由Pr03-50 類比計算方式 ~ 03-68 AUI最高點百分比ge.更改初始值: Pr06-03 和 Pr06-04 的初始值更改為ㄧ般負載: 120%; 輕負載: 120%更改Pr08-10 中文參數名稱為睡眠參考點更改Pr08-10的設定範圍為 0.00~600.00Hz 或更改Pr08-11 中文參數名稱為甦醒參考點更改Pr08-11的設定範圍為 0.00~600.00Hz 或增加參數Pr08-18: 睡眠模式設定增加參數Pr08-19: 驅動器甦醒時積分量的上限增加 Pr02-57: 外/內部端子增加 Pr02-58: 內部端子設定值增加 Pr05-07: IM 電機1 參數 Rr (轉子電阻)增加 Pr05-08: IM電機1 參數Lm (磁通互感量)增加 Pr05-09: IM電機1 參數Lx (總漏感抗)增加 Pr05-19: IM電機2 參數Rr (轉子電阻)增加 Pr05-20: IM 電機2 參數 Lm (磁通互感量)增加 Pr05-21: IM 電機2 參數Lx (轉子電阻)更改Pr09-50的設定範圍為 0~127移除Pr09-54: BACnet Enable Master產品裝置01 產品裝置當使用者拿到產品機種時,請參考下列步驟,以確保使用安全。
AB PLC 培训总结、资料(有图快速入门)
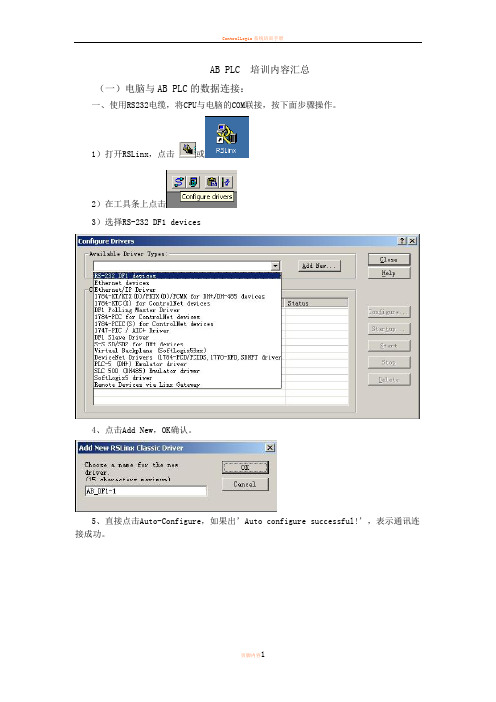
AB PLC 培训内容汇总(一)电脑与AB PLC的数据连接:一、使用RS232电缆,将CPU与电脑的COM联接,按下面步骤操作。
1)打开RSLinx,点击或2)在工具条上点击3)选择RS-232 DF1 devices4、点击Add New,OK确认。
5、直接点击Auto-Configure,如果出’Auto configure successful!’,表示通讯连接成功。
6、直接点击ok即可。
7、单击,通过上述方式查看硬件网络结构。
8、网络结构如下:二、通过以太网电缆,将电脑与PLC机架上的以太网模块1756-ENBT连接,分如下两种方法设置。
1、使用分配IP地址方法,连接PLC。
1)打开RSLinx,点击或2)在工具条上点击3)选择Ethernet Devices, 按下 Add New 键4)单击 OK.5)输入与电脑设置在一个网段上的以太网设备的IP地址,并确定即可。
在configure Driver 中增加新IP地址,可以访问其它站点。
6)单击,通过上述方式查看硬件网络结构如下:2、通过自动获取IP地址的方式连接PLC1)打开RSLinx,点击或2)在工具条上点击3)选择Ethernet /IP Driver, 按下 Add New 键4)单击 OK5)选择本地子网,确定即可。
6)单击,通过上述方式查看硬件网络结构。
注:这是AB软件的一个特点:模块在网络上的通透性。
可以看到任何一级网络的模块,包括以太网,Controlnet网络和Deviecenet网络的各种模块。
(二)RSLogix 5000硬件组态:1、双击桌面图标进入RSLogix 5000软件下面是RSLogix 5000编程界面。
2、新建工程。
3、设置参数如下。
Revision: Logix 平台,提供了固件升级手段。
注意:CPU的硬件版本一定要和软件版本一致。
Type:在Type下拉菜单中你可选择基于Logix 平台的选择多种处理器。
CP-2000使用说明
2.2 启动 放映机 ....................................................................................................................2-3 2.3 关闭放映机 .....................................................................................................................2-5
(有毒有害物质或元素)
铅
汞
镉
六价铬
多溴联苯
多溴二联苯醚
(Pb)
(Hg)
(Cd)
(Cr 6+)
(PBB)
(PBDE)
Low voltage power
低压电源
X
O
O
O
O
O
supply
Breaker/Switch
开关
X
O
O
O
O
O
Ballast
镇流器
X
O
O
DCS控制系统培训讲义(艾默生Deltav)

•程序编写:根据具体的应用情况进行编写, 编译,调试等等
第二章、Deltav系统网络
DeltaV系统结构由工作站、控制器和I/O子系统组成, 各工作站及各控制器之间用以太网方式连接。现场智能 设备或常规设备的信号将接入DeltaV卡件,具备HART、 FUNDATIONTM现场总线、Profibus DP总线、AS-i总线、 DeviceNet总线及RS485串口通讯的设备也将连接到 DeltaV相应的总线接口卡件上。
网络地址分配
第二节、 控制器简介
1、电源卡件
2、控制器卡件
第三节、 I/O卡件
模拟量输入卡件
模拟量输出卡件
开关量输入卡件
开关量输出卡件
1、RTD,热电阻(欧姆)
2、TC,热电偶(mv)
3、AI, (4~20mA)
与2线制设备连接的接线图
与4线制设备连接的接线图
4、AO, (4~20mA)
二、启动引风机
1、点击 设置预设频率 (列如:35Hz,运行 过程中可随时调节风机 频率大小) 2、点击
启动或停止引风机
三、启动鼓风机
1、点击 设置预设频率 (列如:35Hz,运行 过程中可随时调节风机 频率大小) 2、点击
启动或停止鼓风机
四、启动给煤机
1、点击 设置预设频率 (列如:37.5Hz,运行 过程中可随时调节风机 频率大小) 2、点击
编程的一般步骤:
•网络组态:设置固定IP地址,每个DCS厂家 有自己的固定IP设置。Deltav系统的网络组态, 在安装软件时自动设置完成,不需要更改。
•工作站/操作站组态:组态工程师站和操作 员站。(例如一台工程师站,两台操作员站)
Deltav系统培训资料
– 从控制器的非易失闪存中 – 从工程师站的数据库中 –
• 恢复数据功能只有在掉电时间< 暖 • 启动时间(30天)
需要设置为非零
I/O卡件
输入输出卡件 RTD TC HART AI PI MV HART AO DI DO SOE 支持各种总线协议的数据接口卡
Serial Card 串口卡 Fieldbus Card 现场总线卡件 PROFIBUS DP接口卡 As-i 协议接口卡 Device Net 卡 冗余卡件 本安型卡件
(7 ports are used) hub
switches
12 Redundant controllers
2.0km fiber
3 Redundant controllers
2 Simplex controllers
装置 1
4 Workstations
1.8km fiber
1.5km fiber
Simplex controller
Controller
Controller
Operator Stations
操作环境安全管理
•接管Windows用户管理权限 •管理Windows用户和DeltaV用户
操作环境安全管理
用户级:热键管理
系统级:热键管理
控制器及I/O子系统
冗余的系统电源/控制器 成对插在2槽机架上
I/O 卡件插在 8槽宽机架上
• 整定期间维持正常控
制Maintains control during tuning
• 完全内去预知未来
DeltaV预估控制
Controlled
Manipulated
过去
丰东多用炉CP2000仪表编程
9 870 0.85 30.0 1/1 1/0 1/1 1/1 1/0 OFF 0 TS4 TS7
10 830 0.85 0.0 1/1 1/0 1/1 1/1 1/0 OFF 0 TS5 TS7
11 830 0.85 0.0 1/1 1/0 1/1 1/1 1/0 1 1 TS5 TS7
12 830 0.85 50.0 1/1 1/0 1/1 1/1 1/0 OFF 0 TS6 TS7
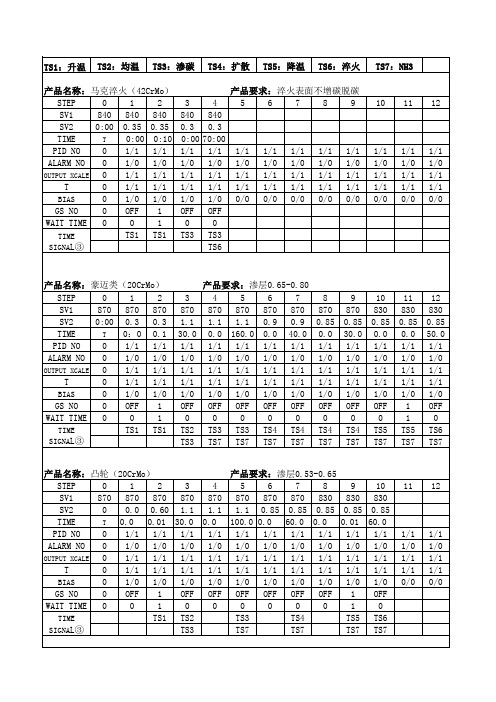
产品名称:凸轮(20CrMo) 产品要求:渗层0.53-0.65 STEP 0 1 2 3 4 5 6 7 8 9 10 SV1 870 870 870 870 870 870 870 870 830 830 830 SV2 0 0.0 0.60 1.1 1.1 1.1 0.85 0.85 0.85 0.85 0.85 TIME SVSTART 0.0 0.01 30.0 0.0 100.0 0.0 60.0 0.0 0.01 60.0 PID NO 0 1/1 1/1 1/1 1/1 1/1 1/1 1/1 1/1 1/1 1/1 ALARM NO 0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 OUTPUT XCALE 0 1/1 1/1 1/1 1/1 1/1 1/1 1/1 1/1 1/1 1/1 VARI.LIMIT 0 1/1 1/1 1/1 1/1 1/1 1/1 1/1 1/1 1/1 1/1 SENSOR BIAS 0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0 GS NO 0 OFF 1 OFF OFF OFF OFF OFF OFF 1 OFF WAIT TIME 0 0 1 0 0 0 0 0 0 1 0 TS1 TS2 TS3 TS4 TS5 TS6 TIME SIGNAL③ TS3 TS7 TS7 TS7 TS7
TIC2000DSP培训

➢ 定向的增/减计数模式:定时器将根据TDIRA/B引脚的输 入,对定标的时钟进行递增或递减计数。
➢ 连续增/减计数模式:定时器的计数方向仅在定时器的值 达到周期寄存器的值时,才改变计数方式。
定时器的PWM输出
为了设置通用定时器以产生PWM输出,需做以下工作:
➢ 根据预定的PWM(载波)周期设置TxPR。
丰富片上存储器类型:RAM、ROM、Flash等
丰富片上外设:Timer、串口(异步/同步)、CAN总线、A/D、PWM和通用I/O 口等
DSP的主要指标
➢ 主频:决定处理器机器时钟周期的长短.
➢ 数据宽度:主要为16位和32位.决定一次能和CPU交换的 数据的最大宽度.
➢ 数据类型:浮点和定点.浮点型数据以指数的形式表示, 定点型数据以整数的形式表示.
➢ FPGA(Field Programmable Gate Array) ,即现场可编程 门阵列.
嵌入式系统开发的前景
➢ 一类是学电子工程、通信工程等偏硬件专业出身的人,他 们主要是搞硬件设计,有时要开发一些与硬件关系最密切 的最底层软件,如BootLoader、Board Support Package(像PC的BIOS一样,往下驱动硬件,往上支持操 作系统).
➢ 死区:在许多的运动/电机控制和功率电子应用场合中,两 个功率器件(上级和下级)被串联在一个功率支路中,为 避免击穿失效,两个器件的打开的周期不能重叠,所以通 常加入死区保护。
寄存器操作
用比较单元和相应的电路产生所有三种PWM波形均需要对 相同的EV寄存器进行配置,配置过程需要以下步骤: ➢ 设置和装载ACTRx(比较动作控制寄存器) ➢ 如需死区,则设置和装载DBTCONx寄存器 ➢ 初始化CMPRx寄存器 ➢ 设置和装载COMCONx(比较控制寄存器) ➢ 设置和装载T1CON或T3CON寄存器,来启动比较操做 ➢ 更新CMPRx寄存器的值
Genesis2000 培训教程及操作流程

查看图型定义属性
M1
在层名里更改层名8 淘花/专用1. 選 欲搬動 之層次
2
2. 選擇 Edit 下 Move 功能
3. 選將 被排擠之 層次
, 双击 STEP 可打开 graphi显示图形控制 抓取 测量工具 填充参数
线参数 显示颜色设置 零件
重点: 1;input 文件及 input 时的 wheel 文件的编辑修改,input 时出
问题的解决方法; 2;graphic edit 图形界面的功能介绍, 3;grahic edit 菜单功能的介绍
同层移动 移动到其他层 平行线伸宿 直角线伸宿
把 step 中的图形 移动到其它的 step 中
Transform 编辑功能介绍
同层复制 复制到其它层
同层排版
选定点 轴 操作选择 旋转 镜像 缩放 是否要自我复制
手工选择旋转镜像缩放点
旋转角度EDIT 之 RESHAPE
2,菲林的正负性 线和盘为有铜的实体菲林为正片,反之,直接蚀刻,菲林出负片,干膜覆盖区为线路,露铜区 经蚀刻为基才(无铜区),留下经退膜是线路.内层分两中: 1, 无 线 路 的 大 铜 面 , 在 GENESIS 里 层 定 义 为 POWER-GROUND,NEGATIVE(负的),如下图,实体为无铜,黑色 的为铜面,梅花状的为花盘(散热盘),开口大于 7MILL.实心的为隔 离盘,(即把孔与铜面隔开,不要与铜面导电),隔离盘单边比孔大十 二 MILL,最小 10MILL.注意下图 BGA 位的散热盘,不要被周边的 隔离盘堵塞了,最少要有 6MILL 间隙.以免短路.周边封边止成型 的 REFERENCE LAYER 里输入你的基准层.OK!层的自动对齐是跟距 网络对齐,如文字,孔位图没网络可寻,只有手动对齐,D 所指兰色方框代表此层为活动层(当前 层或操作层).在 EDIT 菜单下的 MOVE 下的 SAME LAYER 然后抓取此层的一个线或盘的中 心(或交叉点或端点)按键盘的 S 和 A 键把 C 所示出的田字移动到基准层,把光标对准你所选 的线或盘对应的d-code 的规则 wheel 的编辑如图 此步尤为重要 如发现有关 d-code 的任何问题请询问相关人员或咨询客户保证此步的正确性
CP2000实用操作方法
CP2000实用操作方法(1)一调节输纸台在(印刷/印刷材料)菜单中输入纸张厚度,输纸台高度会自动设置好。
·纸张厚度少于0.1mm:每次提升0.5mm·纸张厚度在0.1mm至0.5mm之间:每次提升5张纸的厚度·纸张厚度超过0.5mm:每次提升2.5mm再次更改设置:a.按下走纸按键(图7-7/①)。
(纸张行程)菜单出现在显示屏上。
b.按下输纸堆按键(图7-7/②)。
显示屏上显示(输纸堆)菜单(图7-7)。
c.使用"+"和"-"按键(图7-7/③)来设置所需的提升增量(调整范围:自动确认值至2.5mm)。
图7-7堆纸台调节二进纸调节1.斜张控制自动控制打开电源后。
斜张控制自动设置为自动模式。
通过图7-8的显示屏可切换自动控制和手动控制(建议:打开所有自动操作a.按下走纸按键(图7-8/①)。
(走纸)菜单出现在显示屏上。
b.按下输纸按键(图7-8/②)。
输纸菜单出现。
c.打开或关闭纸张到达(图7-8/④)或斜张(图7-8/③)自动控制装置。
图7-8纸张到达前规的调节d.手动调节使用箭头键调节到纸和斜张校正至适宜数值。
尽量保持盖板的笔直。
调整范围:±10mm。
2.纸张校正打开电源后,纸张校正默认为自动操作。
纸张校正自动操作装置a.按下走纸按键(图7-9/①)。
显示屏上出现(走纸)菜单。
b.按下输纸堆按键(图7-9/②)〉(纸堆)菜单出现在显示屏(图7-9)。
c.按下按键,打开或关闭纸张校正自动操作(图7-9/③)。
如果手动操作纸张校正。
则使用控制台上的控制箭头移动主纸堆和副纸堆。
图7-9纸张自动校正三吹风的设置1.吸纸头吹风的设置在机器预设时吹风会自动调整好。
在此设置值是可以更改的。
打开/关闭速度补偿打开:随着速度的增加吹风量也会增加。
关闭:吹风量保持不变。
a.按下走纸按键(图7-10/①)。
b.按下输纸堆按键(图7-10/②)。
艾默生Deltav学习资料学习资料

第一章Deltav概述本章主要介绍以下内容: Deltav系统架构, Deltav组态软件, Deltav系统容量,PlantWeb.1. Deltav系统架构主要有以下三部分:工作站,交换机和控制器三部分,复杂的Deltav 里就是一个系统里有多个工作站,交换机和交换机.一个Deltav控制网络最多可以带120个节点或者100个控制器或者65个工作站. Deltav I/O 接口有2宽电源/控制器底板和8宽I/O接口底板。
下面是I/O卡件的接线端子。
2.DeltavI/O卡件类型:DI卡, DO卡, AI卡, AOI卡,这里卡的类型基本都是按照通道的数量来分的,有的也是按照通道是否可以单独定义分的.3. Deltav系统的电源输入是24VDC或12VDC.电源卡件给控制器提供5VDC,为I/O 卡件提供的是12VDC.4. Deltav系统容量:最多120个节点,最多65台任何类型的工作站,1台主工程师站,最多10台工程师站,最多59台操作站,最多20台应用站,每台主工程师站或操作站最多支持15台远程客户机,最多100个单独/冗余控制器,30000DST,最多25000SCADA 位号,每个MX控制器最多支持1500个DSTs.每个MD Plus控制器最多支持750个DSTs,15000个高级单元管理DSTs.5. DST设备标签授权:接线到端子板的每个仪表需要一个DST.它的级别由高到低为:AO-AI-DO-DI.高级别的可以替换低级别的.6. Deltav组态软件: Deltav Control Studio, Exploring Deltav, Deltav Operate(Configure)和Deltav Operate(RUN)和诊断的软件等几种常用的组态软件.7.对于控制器的识别:我们在Exploring Deltav软件中在Physicao Network s这个选项,右击属性,我们可以看到有个Flash lights选项,我们在这个选项前面选中,对于的控制器灯就会1s的间隔闪烁,我们要是选中Stop flashing的话,对应的控制器等就会停止闪烁,这样我们就可以找到这个系统对应的控制器了.8.接下来我们还是在Exploring Deltav软件中在Physicao Network中找到Decommissioned Nodes这个选项下投用控制器,还可以在控制器的属性里设置冷启动时间.第二章仿真练习1.在Exploring Deltav界面下,在Control Strategies树形图下,给已有厂区进行重命名和新建一个厂区.按照s88协议一个厂区总共5层,但是我们实际的工作中除了是batch项目外,我们都只有两层:Area和Control Module。
台达CP2000系列变频器说明书
台达CP2000系列变频器说明书台达CP2000系列变频器1、简介1.1 型号及规格1.2 适用范围1.3 主要特点2、安装与接线2.1 安装要求2.2 接线说明2.3 接地方法3、参数设定3.1 主要参数3.2 手动设定方法3.3 远程设定方法4、控制方式4.1 V/F控制4.2 矢量控制4.3 无感矢量控制5、故障诊断与维修5.1 常见故障代码及解决方法 5.2 维修注意事项5.3 常见维修工具介绍6、附加功能6.1 多机联动控制6.2 PID控制6.3 外部编码器接口7、额定与使用条件7.1 额定输入电压与频率7.2 环境条件7.3 额定负载条件8、安全与保护8.1 过载保护8.2 温度保护8.3 断电保护9、法律名词及注释9.1 变频器:也称为变频驱动器,是一种通过调整电源频率来控制电机转速的装置。
9.2 V/F控制:Voltage/Frequency Control,是一种通过调整电源电压与频率的比例来控制电机转速的方法。
9.3 矢量控制:Vector Control,是一种通过对电机电流进行精确控制来实现高精度转速控制的方法。
9.4 无感矢量控制:Sensorless Vector Control,是一种在没有外部编码器的情况下,通过电机电流和变频器内部算法来实现高精度转速控制的方法。
附件.1、变频器安装图示2、变频器参数表3、变频器维修记录表本文档涉及附件,请参考附件内容。
如有需要,请向台达公司官方获取更多相关文档和支持。
9、法律名词及注释:- 变频器:根据相关法律法规定义,指利用电力电子技术调整电源频率,以控制电动机转速的设备。
- V/F控制:Voltage/Frequency Control的缩写,是利用变频器调整电压与频率的比例,以控制电动机转速的一种方法。
- 矢量控制:Vector Control的缩写,是通过对电机电流进行精确控制,实现电机高精度转速控制的一种方法。
- 无感矢量控制:Sensorless Vector Control的缩写,指在没有安装外部编码器的情况下,通过变频器内部算法和电机电流进行转速控制的一种方法。
APB2000培训教程
开票系统操作介绍
系统登录 发票读入 商品设置
网上抄报 申报
开具发票
APB2000培训教程
一、系统登录
将税控器电源开 关拨到“ON”位
置
APB2000培训教程
一、系统登录
税控器发出“嘀”的响 声后,双击桌面图标
APB2000培训教程
APB2000培训教程
APB2000培训教程
APB2000培训教程
到税务机关报税需携带的物品
用户卡 税务机关要求的其
它资料
APB2000培训教程
完税
插入用户卡,点 击完税按钮。
APB2000培训教程
开票系统操作介绍
系统登录 发票读入 商品设置
网上抄报 申报
开具发票
APB2000培训教程
软件操作
• 网上抄报时,应先点击报 税写卡,写卡成功后方可 进行网上抄报
APB2000培训教程
APB2000培训教程
开票系统操作介绍
系统登录 发票读入 商品设置
网上抄报 申报
开具发票
APB2000培训教程
申报流程
报税写卡
到税务局报税或 使用网上报税
完税
特别注意:中兴通纳税申报正常进行 申报顺序:1.用户卡报税2.纳税申报(交Leabharlann 款)APB2000培训教程
报税写卡
插入用户卡 (金属芯片朝下) 如提示打印申报数据,可选择不打印。
4、购票时如何打印发票清单?
APB2000培训教程
销售查询
查询发票号码在00000001到00000010之间的发票使用信息。
APB2000培训教程
谢谢您的学习!
APB2000培训教程
CP2000 基 本 操 作 信 息

CP2000 基本操作信息1 介绍 …………………………………………………………………………………… B.2.31.1 CP2000概述 ......................................................……….......................................... B.2.31.2 启动印刷机 ………………………………………………………………………. B.2.31.3 CP2000中央控制台—概述 ……………………………………………………….. B.2.31.4 控制面板 …………………………………………………………………………… B.2.41.5 调节显示屏………………………………………………………………………… B.2.51.6 锁住控制面板 ……………………………………………………………………. B.2.81.7 擦洗CP2000中央控制台 …………………………………..……………………. B.2.91.8 关闭印刷机电源…………………………………………………………………. B.2.102 控制系统的结构 …......................................................................................................... B.2.122.1 操作界面—概述 ………….................................................................................... B.2.122.2 状态显示 ………………………………………………………............................ B.2.132.3 程序级别 ……………………………………………………….............................. B.2.142.4 在操作界面输入信息 …………………………………………………………….. B.2.142.5 数据传输 ………………………………………………………………………….. B.2.182.6 工作存储卡 ……………………………………………………….……………….. B.2.20CP2000基本操作信息1 介绍1.1 CP2000概述1.2 启动印刷机1.3CP2000中央控制台—概述图1 CP2000是CP2000型印刷机使用者控制印刷机的中央控制面板。
2013版台达变频器CP2000 说明书

CP2000 參數表手冊SC-1參數一覽表使用者可快速搜尋各參數的設定範圍及出廠設定值,方便自行設定參數。
可以藉2)「備註」欄位,提供使用者在自行設定後,可記錄下自行設定值。
3)詳盡的參數說明,請參閱使用手冊。
00驅動器參數參數碼參數名稱設定範圍初始值備註00-00交流電機驅動器機種代碼識別4: 230V, 1HP (0.75kW)5: 460 V, 1HP (0.75kW)6: 230V, 2HP (1.5kW)7: 460 V, 2HP (1.5kW)8: 230V, 3HP (2.2kW)9: 460 V, 3HP (2.2kW)10: 230V, 5HP (3.7kW)11: 460 V, 5HP (3.7kW)12: 230V, 7.5HP (5.5kW)13: 460 V, 7.5HP (5.5kW)14: 230V, 10HP (7.5kW)15: 460V, 10HP (7.5kW)16: 230V, 15HP (11kW)17: 460V, 15HP (11kW)18: 230V, 20HP (15kW)19: 460V, 20HP (15kW)20: 230V, 25HP (18.5kW)21: 460V, 25HP (18.5kW)22: 230V, 30HP (22kW)23: 460V, 30HP (22kW)24: 230V, 40HP (30kW)25: 460V, 40HP (30kW)26: 230V, 50HP (37kW)27: 460V, 50HP (37kW)28: 230V, 60HP (45kW)29: 460V, 60HP (45kW)30: 230V, 75HP (55kW)31: 460V, 75HP (55kW)32: 230V, 100HP (75kW)33: 460V, 100HP (75kW)34: 230V, 125HP(90kW)35: 460V, 125HP (90kW)37: 460V, 150HP (110kW)39: 460V, 175HP(132kW)41: 460V, 215HP(160kW)43: 460V, 250HP(185kW)45: 460V, 300HP(220kW)47: 460V, 375HP(280kW)49: 460V, 425HP(315kW)51: 460V, 475HP(355kW)53: 460V, 536HP(400kW)93:460V, 5.5HP (4.0kW)唯讀00-01 交流電機驅動器額定電流顯示依機種顯示唯讀SC-200-02 參數管理設定0: 無功能1: 參數防寫5: KWH 顯示歸零6:重置PLC (包含CANopen主站相關設定)7: 重置CANopen從站相關設定9: 參數重置(基底頻率為50Hz)10: 參數重置(基底頻率為60Hz)00-03 開機顯示畫面選擇0:F(頻率指令)1:H(輸出頻率)2:U(使用者定義)參數00-04 3:A (輸出電流)00-04 多功能顯示選擇(使用者定義)0:顯示驅動器至電機之輸出電流(A)1:顯示計數值(c)2:顯示驅動器實際輸出頻率(H.)3:顯示驅動器內直流側之電壓值DC-BUS電壓(v)4:顯示驅動器之U, V, W輸出電壓值(E)5:顯示驅動器輸出之功因角度(n)6:顯示驅動器輸出之功率kW(P)8:顯示驅動器估算之輸出轉矩%(t)10:顯示PID回授值%(b)11:顯示A VI1類比輸入端子之訊號值%(1.)12:顯示ACI類比輸入端子之訊號值%(2.)13:顯示A VI2類比輸入端子之訊號值%(3.)14:顯示驅動器功率模組IGBT的溫度℃(i.)15:顯示驅動器電源電容的溫度℃(c.)16:數位輸入 ON/OFF 狀態(i)17:數位輸出 ON/OFF 狀態(o)18:顯示正在執行多段速的段速(S)19:數位輸入對應之CPU 腳位元狀態(d.)20:數位輸出對應之CPU 腳位元狀態(0.)25:超載計數(0.00~100.00%)(h.)26:GFF對地短路電流(單位:%)(G.)27:母線電壓Dcbus 鏈波(單位:Vdc) (r.)28:顯示PLC暫存器D1043之值(C)30:使用者定義輸出顯示(U)31:參數00-05使用者增益顯示(K)300-05 實際輸出頻率比例增益係數0~160.00 000-06 軟體版本僅供讀取#.#00-07 參數保護解碼輸入0∼655350~4:記錄密碼錯誤次數SC-300-08 參數保護密碼輸入0∼655350:未設定密碼鎖或00-07密碼輸入成功1:參數已被鎖定00-09 顯示群組進階參數Bit 0: Group 0Bit 1: Group 1Bit 2: Group 2Bit 3: Group 3Bit 4: Group 4Bit 5: Group 5Bit 6: Group 6Bit 7: Group 7Bit 8: Group 8Bit 9: Group 900-11 速度模式控制選擇0: VF(感應電機 V/F控制)2: SVC(感應電機無感測向量控制)00-16 負載選擇0:一般負載1:重載00-17 載波頻率輕負載1-20HP 2~15KHz25-60HP 2~10KHz75-125HP 2~9KHz一般負載1-15HP 2~15KHz20-50HP 2~10KHz60-100HP 2~9KHz864200-18 保留00-19 PLC命令遮罩(SOOC,SOOF, SOTC, SOPC)0~65535 000-20 頻率指令來源設定(AUTO)0:由鍵盤輸入1:由通訊RS485輸入2:由外部模擬輸入(參數03-00)3:由外部up/down端子6:由CANopen通訊卡8:由通訊卡(不含CANopen卡)00-21 運轉指令來源設定(AUTO)0:數位操作器操作1:外部端子操作2:通訊RS-4853:由CANopen通訊卡5:由通訊卡(不含CANopen卡)00-22 停車方式0:以減速煞車方式停止1:以自由運轉方式停止00-23 運轉方向選擇0:可正反轉1:禁止反轉00-24 通訊頻率命令記憶僅供讀取唯讀SC-400-25 使用者定義屬性Bit 0~3: 控制使用者定義的小數點數0000b: 無小數點0001b: 小數點1位0010b: 小數點2位0011b: 小數點3位Bit 4~15: 控制使用者定義的單位顯示000xh: Hz001xh: rpm002xh: %003xh: kg004xH: m/s005xH: kW006xH: HP007xH: ppm008xH: 1/m009xH: kg/s00AxH: kg/m00BxH: kg/h00CxH: lb/s00DxH: lb/m00ExH: lb/h00FxH: ft/s010xH: ft/m011xH: m012xH: ft013xH: degC014xH: degF015xH: mbar016xH: bar017xH: Pa018xH: kPa019xH: mWG01AxH: inWG01BxH: ftWG01CxH: psi01DxH: atm01ExH: L/s01FxH: L/m020xH: L/h021xH: m3/s022xH: m3/h023xH: GPM024xH: CFM00-26 使用者定義的最大值0 : 無功能0000b : 0~65535 (當參數00-25設定無小數點)0001b : 0.0~6553.5(當參數00-25設定小數點1位)0010b : 0.0~655.35(當參數00-25設定小數點2位)0100b : 0.0~65.535(當參數00-25設定小數點3位)00-27 使用者定義的設定值僅供讀取唯讀00-28 自動模式切換手動模式Bit0 : 睡眠功能控制位元0: 取消睡眠功能1: 睡眠功能與自動模式相同Bit1 : 單位顯示控制位元元0: 單位顯示改為 Hz1: 單位顯示與自動模式相同Bit2 : PID 控制位元0: 取消PID 控制1: PID控制與自動模式相同SC-500-29 LOCAL/REMOTE動作選擇0: KPC-CC01使用HOA定義, 功能輸入端子根據HAND切換&AUTO切換動作1: KPC-CC01使用LOCAL/REMOTE定義,LOCAL/REMOTE切換時,不記憶狀態, 多功能輸入端子根據 LOCAL/REMOTE切換動作2: KPC-CC01使用LOCAL/REMOTE定義,LOCAL/REMOTE切換時,記憶REMOTE狀態, 多功能輸入端子根據 LOCAL/REMOTE切換動作3: KPC-CC01使用LOCAL/REMOTE定義,LOCAL/REMOTE切換時,記憶LOCAL狀態, 多功能輸入端子根據 LOCAL/REMOTE切換動作4: KPC-CC01使用LOCAL/REMOTE定義,LOCAL/REMOTE切換時,記憶狀態, 多功能輸入端子根據LOCAL/REMOTE切換動作00-30 頻率指令來源設定(HAND)0:由鍵盤輸入1:由通訊RS485輸入2:由外部模擬輸入(參數03-00)3:由外部up/down端子6:由CANopen通訊卡8:由通訊卡(不含CANopen卡)00-31 運轉指令來源設定(HAND)0:數位操作器操作1:外部端子操作2:通訊RS-4853:由CANopen通訊卡5:由通訊卡(不含CANopen卡)00-32 數位操作器STOP鍵致能0: 數位操作器STOP鍵無效1: 數位操作器STOP鍵有效00-33~00-47保留00-48 電流顯示濾波時間 0.001~65.535秒0.10000-49 數位操作器顯示濾波時間0.001~65.535秒0.10000-50 軟體版本日期碼僅供讀取#####SC-601 基本參數( 表示可在運轉中執行設定功能)參數碼參數名稱設定範圍初始值備註01-00最高操作頻率50.00~600.00Hz 60.00/ 50.0001-01 電機1輸出頻率設定0.00~600.00Hz60.00/50.0001-02 電機1輸出電壓設定230V機種:0.0V~255.0V460V機種:0.0V~510.0V200.0400.001-03 電機1輸出中間1頻率設定0.00~600.00Hz 3.0001-04 電機1輸出中間1電壓設定230V機種:0.0V~240.0V460V機種:0.0V~480.0V11022001-05 電機1輸出中間2頻率設定0.00~600.00Hz 0.5001-06 電機1輸出中間2電壓設定230V機種:0.0V~240.0V460V機種:0.0V~480.0V4.08.001-07 電機1輸出最低頻率設定0.00~600.00Hz 0.0001-08 電機1輸出最小電壓設定230V機種:0.0V~240.0V460V機種:0.0V~480.0V0.00.001-09 啟動頻率0.00~600.00Hz 0.50 01-10 上限頻率0.00~600.00Hz 600.00 01-11 下限頻率0.00~600.00Hz 001-12 第一加速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.001-13 第一減速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.001-14 第二加速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.001-15 第二減速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.001-16 第三加速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.001-17 第三減速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.001-18 第四加速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.001-19 第四減速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.001-20 寸動(JOG)加速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.0SC-701-21 寸動(JOG)減速時間設定參數01-45=0:0.00~600.00秒參數01-45=1:0.00~6000.0秒10.0010.001-22 寸動(JOG)頻率設定0.00~600.00Hz 6.0001-23 第一段/第四段加減速切換頻率0.00~600.00Hz 0.0001-24 S加速起始時間設定1參數01-45=0:0.00~25.00秒參數01-45=1:0.0~250.0秒0.200.201-25 S加速到達時間設定2參數01-45=0:0.00~25.00秒參數01-45=1:0.0~250.0秒0.200.201-26 S減速起始時間設定1參數01-45=0:0.00~25.00秒參數01-45=1:0.0~250.0秒0.200.201-27 S減速到達時間設定2參數01-45=0:0.00~25.00秒參數01-45=1:0.0~250.0秒0.200.201-28 禁止設定頻率1上限0.00~600.00Hz 0.0001-29 禁止設定頻率1下限0.00~600.00Hz 0.0001-30 禁止設定頻率2上限0.00~600.00Hz 0.0001-31 禁止設定頻率2下限0.00~600.00Hz 0.0001-32 禁止設定頻率3上限0.00~600.00Hz 0.0001-33 禁止設定頻率3下限0.00~600.00Hz 0.0001-34 零速模式選擇0:輸出等待1:零速運轉2:以最小頻率輸出01-35 電機2輸出最高頻率設定0.00~600.00Hz 60.00/50.0001-36 電機2輸出最大電壓設定230V機種:0.0V~255.0V460V機種:0.0V~510.0V200.0400.001-37 電機2輸出中間1頻率設定0.00~600.00Hz301-38 電機2輸出中間1電壓設定230V機種:0.0V~240.0V460V機種:0.0V~480.0V11022001-39 電機2輸出中間2頻率設定0.00~600.00Hz 0.5001-40 電機2輸出中間2電壓設定230V機種:0.0V~240.0V460V機種:0.0V~480.0V4.08.001-41 電機2輸出最低頻率設定0.00~600.00Hz 0.0001-42 電機2輸出最小電壓設定230V機種:0.0V~240.0V460V機種:0.0V~480.0V0.00.001-43 V/F曲線選擇0:依照參數01-00~01-08設定1:1.5次方曲線2:2次方曲線01-44 自動加減速設定0:直線加減速1:自動加速,直線減速2:直線加速,自動減速3:自動加減速4:直線,以自動加減速作為失速防止(受限參數01-12 ~01-21)SC-801-45 加減速及S曲線時間單位0:單位0.01杪1:單位0.1秒01-46 CANopen快速停止時間參數01-45=0: 0.00~600.00秒參數01-45=1: 0.0~6000.0秒1.0001-47~01-50 保留SC-902 數位輸入/輸出參數( 表示可在運轉中執行設定功能)參數碼參數名稱設定範圍初始值備註02-00二線/三線式運轉控制0:2 線式模式1,電源啟動運轉控制動作1:2 線式模式2,電源啟動運轉控制動作2:3 線式,電源啟動運轉控制動作02-01 多功能輸入指令一(MI1)0:無功能 102-02 多功能輸入指令二(MI2)1:多段速指令1/多段位置指令1202-03 多功能輸入指令三(MI3)2:多段速指令2/多段位置指令2302-04 多功能輸入指令四(MI4)3:多段速指令3/多段位置指令3402-05 多功能輸入指令五(MI5)4:多段速指令4/多段位置指令402-06 多功能輸入指令六(MI6)5:異常複歸指令Reset 002-07 多功能輸入指令七(MI7)6:JOG指令(依KPC-CC01或外部控制)02-08 多功能輸入指令八(MI8)7:加減速禁止指令002-26 加裝擴充卡之輸入端子(MI10)8:第一、二加減速時間切換002-27 加裝擴充卡之輸入端子(MI11)9:第三、四加減速時間切換002-28 加裝擴充卡之輸入端子(MI12)10:EF輸入(參數07-20) 002-29 加裝擴充卡之輸入端子(MI13)11:外部中斷B.B.輸入(BaseBlock)02-30 加裝擴充卡之輸入端子(MI14)12:輸出停止002-31 加裝擴充卡之輸入端子(MI15)13:取消自動加減速設定014:電機1、2切換15:轉速命令來自A VI116:轉速命令來自ACI17:轉速命令來自A VI218:強制停機(參數07-20)19:遞增指令20:遞減指令21:PID 功能取消22:計數器清除23:計數輸入(MI6)24:FWD JOG指令25:REV JOG指令27:ASR1/ASR2切換28:緊急停止(EF1)29:電機線圈Y接確認訊號30:電機線圈△接確認訊號38:寫入EEPROM禁止40:強制自由運轉停止41:HAND切換42:AUTO切換44~47:保留49:驅動器致能51:PLC 模式切換的選擇bit 0SC-10註52:PLC 模式切換的選擇bit 153:CANopen 快速停車的觸發54: UVW電磁開關確認55: 煞車釋放確認信號56: LOC/REM切換57:保留58: 啟動火災模式 (with RUN Command)59: 啟動火災模式 (withoutRUN Command)60: 所有電機失效61: 電機 #1 失效62: 電機 #2 失效63: 電機 #3 失效64: 電機 #4 失效65: 電機 #5 失效66: 電機 #6 失效67: 電機 #7 失效68: 電機 #8 失效69~70:無功能02-09 UP/DOWN鍵模式0:up/down依加減速時間1:up/down定速(參數02-10)02-10 定速UP/DOWN鍵加減速速率0.01~1.00Hz/ms 0.0102-11 多功能輸入回應時間0.000~30.000秒0.00502-12 多功能輸入模式選擇0000h~FFFFh(0:N.O. ; 1:N.C.)002-13 多功能輸出1 RY1 0:無功能11 02-14 多功能輸出2 RY21:運轉中指示 1 02-15 多功能輸出3 RY32:運轉速度到達002-16~02-17 保留3:任意頻率到達 1 (參數02-22)02-36 加裝擴充卡之輸出端子(MO104:任意頻率到達 2 (參數02-24)02-37 加裝擴充卡之輸出端子(MO115:零速(頻率命令) 002-38 加裝擴充卡之輸出端子(MO126:零速含STOP(頻率命令) 002-39 加裝擴充卡之輸出端子(MO13)7:過轉矩1 002-40 加裝擴充卡之輸出端子(MO14)8:過轉矩2 002-41 加裝擴充卡之輸出端子(MO15)9:驅動器準備完成002-42 加裝擴充卡之輸出端子(MO16)10:低電壓警報(LV)(參數06-00)02-43 加裝擴充卡之輸出端子(MO17)11:故障指示002-44 加裝擴充卡之輸出端子(MO17)12:機械煞車釋放(參數02-32)002-45 加裝擴充卡之輸出端子(MO19)13:過熱警告(參數06-15) 002-46 加裝擴充卡之輸出端子(MO20)14:軟體煞車動作指示(參數07-00)15:PID回授異常16:滑差異常(oSL)SC-11註17:計數值到達不歸0(參數02-20)18:計數值到達歸0(參數02-19)19:外部中斷B. B. 輸入(BaseBlock)20:警告輸出21:過電壓警告22:過電流失速防止警告23:過電壓失速防止警告24:驅動器操作模式25:正轉命令26:反轉命令27:高於參數02-33設定電流准位時輸出 (>= 02-33)28:低於參數02-33設定電流准位時輸出 (<02-33)29:高於參數02-34的設定頻率時輸出 (>= 02-34)30:低於參數02-34的設定頻率時輸出 (< 02-34)31:電機線圈切換Y接命令32:電機線圈切換△接命令33:零速(實際輸出頻率)34:零速含Stop (實際輸出頻率)35:錯誤輸出選擇 1 (參數06-23)36:錯誤輸出選擇 2 (參數06-24)37:錯誤輸出選擇 3 (參數06-25)38:錯誤輸出選擇 4 (參數06-26)40:運轉速度到達含停止44:低電流輸出(搭配06-71~06-73)45:UVW電磁開關致能47:煞車閉合輸出50:提供給CANopen當做控制輸出51:提供給RS485當做控制輸出52:提供給通訊卡當做控制輸出53: 火災模式指示54: 火災模式旁路指示55: 電機 #1輸出56: 電機 #2輸出57: 電機 #3輸出58: 電機 #4輸出59: 電機 #5輸出60: 電機 #6輸出61: 電機 #7輸出62: 電機 #8輸出02-18 多功能輸出方向 0000h~FFFFh(0:N.O. ; 1:N.C.)000h02-19 最後計數值到達設定(歸0)0~65500 0SC-12註02-20 計數值到達設定(不歸0)0~65500 002-21 數位輸出增益(DFM)1∼166 102-22 任意到達頻率 1 0.00∼600.00Hz 60.00/ 50.0002-23 任意到達頻率1 寬度0.00∼600.00Hz 2.0002-24 任意到達頻率 2 0.00∼600.00Hz 60.00/ 50.0002-25 任意到達頻率2 寬度0.00∼600.00Hz 2.0002-32 煞車動作延遲時間0.000~65.000秒0.00002-33 多功能輸出端子動作之輸出電流准位設定0~100% 002-34 多功能輸出端子動作之輸出頻率設定0.00~ 600.00Hz 0.0002-35 重置、電源啟動後外部控制運轉選擇0:無效1:重置後,若運轉命令存在驅動器執行運轉02-47 電機零速速度准位元0~65535 rpm 002-48 解析度切換的最大頻率0.01~600.00Hz 60.0002-49 切換最高輸出頻率之延遲時間0.000~65.000秒0.00002-50 多機能輸入端子動作狀態監控多機能輸入端子動作狀態唯讀02-51 多機能輸出端子動作狀態監控多機能輸出端子動作狀態唯讀02-52 顯示被PLC所使用的外部多功能輸入端子監控PLC功能輸入端子動作狀態唯讀02-53 顯示被PLC所使用的模擬輸入端子監控PLC功能輸出端子動作狀態唯讀02-54 顯示外部端子使用頻率命令記憶僅供讀取唯讀SC-1303 模擬輸入/輸出參數( 表示可在運轉中執行設定功能)參數碼參數名稱設定範圍初始值備註03-00 A VI1模擬輸入功能選擇0:無功能 103-01 ACI模擬輸入功能選擇1:頻率命令(轉矩控制模式下的轉速限制)4:PID 目標值5:PID 回授訊號6:正溫度係數熱敏電阻(PTC)輸入值11:PT100 熱敏電阻輸入值12~17:保留03-03A VI1 模擬輸入偏壓-100.0~100.0% 003-04 ACI 模擬輸入偏壓-100.0~100.0% 003-05 A VI2 類比正電壓輸入偏壓-100.0~100.0% 003-06 保留03-07 A VI1正負偏壓模式03-08 ACI正負偏壓模式03-09 A VI2正負偏壓模式0:無偏壓1:低於偏壓=偏壓2:高於偏壓=偏壓3:以偏壓為中心取絕對值4:以偏壓為中心03-10 類比命令偏壓動作0:不允許負頻率輸入,正反轉動作由數位操作器或外部端子控制1:允許負頻率輸入,正頻率正轉,負頻率反轉,數位操作器或外部端子控制無法控制正反轉03-11 A VI1 模擬輸入增益 1-500.0~500.0% 100.003-12 ACI 模擬輸入增益 2-500.0~500.0% 100.003-13 A VI2 模擬輸入增益 3-500.0~500.0% 100.003-14 A VI2 模擬輸入增益 4-500.0~500.0% 100.003-15 A VI1模擬輸入濾波時間0.00~2.00秒0.0103-16 ACI模擬輸入濾波時間0.00~2.00秒0.0103-17 A VI2模擬輸入濾波時間0.00~2.00秒0.0103-18 模擬輸入相加功能0:不可相加(A VI1、ACI、A VI2)1:可相加03-19 ACI斷線選擇0:無斷線選擇1:以斷線前的頻率命令持續運轉2:減速到0H3:立即停車並顯示EF03-20 多功能輸出1(AFM1)0:輸出頻率 (Hz) 003-23 多功能輸出2(AFM2)1:頻率命令 (Hz) 02:電機轉速 (Hz)3:輸出電流(rms)SC-144:輸出電壓5:DC Bus 電壓6:功率因數7:功率9:A VI1百分比10:ACI 百分比11:A VI2 百分比20:CANopen類比輸出21:RS485類比輸出22:通訊卡類比輸出23:固定電壓輸出03-21 模擬輸出一增益(AFM 1)0~500.0% 100.003-22 模擬輸出一反向致能(AFM 1)0:輸出電壓絕對值1:反向輸出0V;正向輸出0-10V2:反向輸出5-0V;正向輸出5-10V03-24 模擬輸出二增益(AFM 2)0~500.0% 100.003-25 模擬輸出二反向致能(AFM 2)0:輸出電壓絕對值1:反向輸出0V;正向輸出0-10V2:反向輸出5-0V;正向輸出5-10V03-26 保留03-27 AFM2 輸出偏移量-100.00~100.00% 0.0003-28 A VI1端子輸入選擇0: 0-10V1: 0-20mA2: 4-20mA03-29 ACI端子輸入選擇0: 4-20mA1: 0-10V2: 0-20mA03-30 顯示PLC所使用的模擬輸出端子0000h~FFFFh監控PLC功能類比輸出端子動作狀態0000h03-31 AFM2 0-20mA輸出選擇0: 0-20mA輸出1: 4-20mA輸出03-32 AFM1 直流輸出設定準位0.00~100.00% 0.0003-33 AFM2 直流輸出設定準位0.00~100.00% 0.0003-34 AFM1 0-20mA輸出選擇0: 0-20mA輸出1: 4-20mA輸出03-35~03-49 保留保留保留03-50 類比計算方式0~7 0 03-51 AVI1最低點0~10.00 / 0~20.00 003-52 AVI1最低點百分比0~100% 003-53 AVI1中間點0~10.00 / 0~20.00 5.0003-54 AVI1中間點百分比0~100% 5003-55 AVI1最高點0.00~10.00 / 0.00~20.00 10.0003-56 AVI1最高點百分比0~100% 10003-57 ACI最低點0.00~10.00 / 0.00~20.00 4.0003-58 ACI最低點百分比0~100% 0SC-1503-59 ACI中間點0.00~10.00 / 0~20.00 12.0003-60 ACI中間點百分比0~100% 50 03-61 ACI最高點0.00~10.00 / 0.00~20.00 20.0003-62 ACI最高點百分比0~100% 100 03-63 AVI2最低點電壓0.00~10.00V 003-64 AVI2最低點百分比0~100% 003-65 AVI2中間點電壓0~10.00V 5.0003-66 AVI2中間點百分比0~100% 5003-67 AVI2最高點電壓0.00~10.00V 10.0003-68 AVI2最高點百分比0~100%SC-1604-00第一段速0.00~600.00Hz 0.00 04-01第二段速0.00~600.00Hz 0.0004-02第三段速0.00~600.00Hz 0.0004-03第四段速0.00~600.00Hz 0.0004-04第五段速0.00~600.00Hz 0.0004-05第六段速0.00~600.00Hz 0.0004-06第七段速0.00~600.00Hz 0.0004-07第八段速0.00~600.00Hz 0.0004-08第九段速0.00~600.00Hz 0.0004-09第十段速0.00~600.00Hz 0.0004-10第十一段速0.00~600.00Hz 0.0004-11第十二段速0.00~600.00Hz 0.0004-12第十三段速0.00~600.00Hz 0.0004-13第十四段速0.00~600.00Hz 0.0004-14第十五段速0.00~600.00Hz 0.00SC-1705-00電機參數自動量測0:無功能1:感應電機之動態測試2:感應電機之靜態測試05-01感應電機1滿載電流(A)驅動器額定電流的10~120%#.##05-02 感應電機1額定功率(kW)0~655.35kW#.##05-03 感應電機1額定轉速(rpm)0~655351710(60Hz 4極);1410(50Hz 4極)171005-04 感應電機1極數2~20 405-05 感應電機1無載電流(A)0~參數05-01出廠設定值#.##05-06 感應電機1參數Rs(定子電阻)0~65535mΩ#.###05-07 IM 電機1 參數 Rr(轉子電阻)0~65.535mΩ05-08 IM電機1 參數Lm(磁通互感量)0~65535mH05-09 IM電機1 參數Lx(總漏感抗)0~65535mH05-10~05-12保留05-13 感應電機2滿載電流(A)10~120%#.##05-14 感應電機2 額定功率(kW)0~655.35kW#.##05-15 感應電機2 額定轉速(rpm)0~655351710(60Hz 4極);1410(50Hz 4極)171005-16 感應電機2 極數2~20 405-17 感應電機2 無載電流(A)0~參數05-01出廠設定值#.##05-18 感應電機2 參數Rs(定子電阻)0~65.535Ω#.###05-19 感應電機2 參數Rr(轉子電阻)0~65.535Ω#.###05-20 感應電機 2 參數Lm(磁通互感量)0~6553.5mH#.#05-21 感應電機2 參數Lx(總漏感抗)0~6553.5mH#.#05-22 感應電機1/電機 2選擇1:電機12:電機2105-23 感應電機Y-△切換頻率設定0.00~600.00Hz60.0005-24 感應電機Y-△切換致能0:無功能1:致能05-25 感應電機Y-△切換延遲時間0.000~60.000秒0.20005-26 累計電機運轉瓦時低字元(W-sec)唯讀#.#05-27 累計電機運轉瓦時高字元(W-sec)唯讀#.#05-28 累計電機運轉瓦時(W-Hour)唯讀#.#05-29 累計電機運轉瓦時低字元(KW-Hour)唯讀#.#05-30 累計電機運轉瓦時高字元(KW-Hour)唯讀#.#SC-18參數碼參數名稱設定範圍初始值備註05-31 累計電機運轉時間(分鐘)00~143905-32 累計電機運轉時間(天數)00~65535SC-1906 保護參數( 表示可在運轉中執行設定功能)參數碼參數名稱設定範圍初始值備註06-00低電壓位元准230V:160.0~220.0VdcFrame E 以上機種(含):190.0~220.0V460V:320.0~440.0VdcFrame E 以上機種(含):380.0~440.0V180360Frame E以上機種(含):200.0/400.006-01 過電壓失速防止230V:350.0~450.0Vdc460V:700.0~900.0Vdc380.0760.006-02 過電壓失速防止動作選擇0:使用傳統過電壓失速防止1:使用智慧型過電壓失速防止06-03 加速中過電流失速防止位准ㄧ般負載:0~160%(100%對應驅動器的額定電流); 輕負載:0~130%(100%對應驅動器的額定電流ㄧ般負載:120;輕負載:12006-04 運轉中過電流失速防止位准ㄧ般負載:0~160%(100%對應驅動器的額定電流); 輕負載:0~130%(100%對應驅動器的額定電流ㄧ般負載:120;輕負載:12006-05 定速運轉中過電流失速防止之加減速選擇0:依照目前之加減速時間1:依照第一加減速時間2:依照第二加減速時間3:依照第三加減速時間4:依照第四加減速時間5:依照自動加減速06-06 過轉矩檢出動作選擇OT10:不動作1:定速運轉中過轉矩偵測,繼續運轉2:定速運轉中過轉矩偵測,停止運轉3:運轉中過轉矩偵測,繼續運轉4:運轉中過轉矩偵測,停止運轉06-07 過轉矩檢出位准OT110~200%(100%對應驅動器的額定電流)12006-08 過轉矩檢出時間OT10.0~60.0秒0.106-09 過轉矩檢出動作選擇OT20:不動作1:定速運轉中過轉矩偵測,繼續運轉2:定速運轉中過轉矩偵測,停止運轉3:運轉中過轉矩偵測,繼續運轉4:運轉中過轉矩偵測,停止運轉06-10 過轉矩檢出位准OT210~200%(100%對應驅動器的額定電流)12006-11 過轉矩檢出時間OT20.0~60.0秒0.106-12 電流限制0~200%(100%對應驅動器的額定電流)150%06-13 電子熱電驛 1 選擇(電機 1)0:變頻專用電機1:標準電機2:無電子熱電驛206-14 熱電驛 1 作用時間(電機 1)30.0~600.0秒60.006-15 OH過熱警告溫度准位元0.0~110.0℃ 85.006-16 失速防止限制准位0∼100% (參考參數06-03,06-04)50SC-2006-17 最近第一異常記錄0:無異常記錄0 06-18 最近第二異常記錄1:ocA 加速中過電流0 06-19 最近第三異常記錄2:ocd 減速中過電0 06-20 最近第四異常記錄3:ocn 恒速中過電流0 06-21 最近第五異常記錄4:GFF 接地過電流0 06-22 最近第六異常記錄5:occ IGBT短路保護06:ocS 停止中過電流7:ovA 加速中過電壓8:ovd 減速中過電壓9:ovn 恒速中過電壓10:ovS 停止中過電壓11:LvA 加速中低電壓12:Lvd 減速中低電壓13:Lvn 恒速中低電壓14:LvS 停止中低電壓15:OrP 輸入欠相保護16:oH1 (IGBT過熱)17:oH2 (電容過熱)18:tH1o (TH1 open:IGBT過熱保護線路異常)19:tH2o (TH2 open:電容過熱保護線路異常)20:保留21:oL (驅動器超載)22:EoL1 (電子熱動電驛1保護動作)23:EoL2 (電子熱動電驛2保護動作)24:oH3 (PTC) 電機過熱25:保留26:ot1 過轉矩 127:ot2 過轉矩 228:uC 低電流29:保留30:cF1 記憶體寫入異常31:cF2 記憶體讀出異常32:保留33:cd1 U相電流偵測異常34:cd2 V相電流偵測異常35:cd3 W相電流偵測異常36:Hd0 cc電流偵測異常37:Hd1 oc電流偵測異常38:Hd2 ov流偵測異常39:Hd3 occ IGBT短路偵測異常40:AUE 電機參數自動調適失敗41:AFE PID回饋斷線42~47保留48:ACE 類比電流輸入斷線49:EF 外部錯誤訊號輸入50:EF1 緊急停止51:bb 外部中斷52:Pcod 密碼錯誤53:保留54:CE1 通訊異常55:CE2 通訊異常56:CE3 通訊異常SC-2157:CE4 通訊異常58:CE10 通訊 Time Out59:CP10 PU面板 Time out60:bF 煞車晶體異常61:ydc電機線圈Y-△切換錯誤62:dEb錯誤63:oSL轉差異常64~65保留73:S1 外部安全關閘74~78: 保留79: Uoc U相過電流80: V oc V相過電流81: Woc W相過電流82: OPHL U相輸出欠相83: OPHL V相輸出欠相84: OPHL W相輸出欠相85~100: 保留101:CGdE CANopen軟體斷線1102:CHbE CANopen軟體斷線2103:CSYE CANopen同步錯誤104:CbFE CANopen硬體斷線105:CIdE CANopen106:CAdE CANopen107:CFrE CANopen111:保留06-23 異常輸出選擇 1 0~65535(參考異常訊息bit表) 0 06-24 異常輸出選擇 2 0~65535(參考異常訊息bit表) 0 06-25 異常輸出選擇 3 0~65535(參考異常訊息bit表) 0 06-26 異常輸出選擇 4 0~65535(參考異常訊息bit表) 006-27 電子熱電驛 2 選擇(電機 2)0:變頻專用電機1:標準電機2:無電子熱電驛206-28 熱電驛 2 作用時間(電機 2)30.0~600.0秒60.006-29 PTC動作選擇0:警告並繼續運轉1:警告且減速停車2:警告且自由停車3:不警告06-30 PTC 准位 0.0∼100.0% 50.0 06-31 故障時頻率命令0.00~655.35 Hz 唯讀06-32 故障時輸出頻率0.00~655.35 Hz 唯讀06-33 故障時輸出電壓值0.0~6553.5 V 唯讀06-34 故障時直流側電壓值0.0~6553.5 V唯讀06-35 故障時輸出電流值0.00~655.35 Amp 唯讀06-36 故障時IGBT溫度0.0~6553.5 ℃唯讀06-37 故障時電容溫度0.0~6553.5 ℃唯讀06-38 故障時電機的rpm 0~65535 唯讀06-39 保留06-40 故障時多功能輸入端子狀態0~65535唯讀06-41 故障時多功能輸出端子狀態0~65535唯讀06-42 故障時驅動器狀態0~65535 唯讀06-43 保留06-44 保留SC-2206-45 偵測輸出欠相處置方式(OPHL)0:警告並繼續運轉1:警告且減速停車2:警告且自由停車3:不警告306-46 輸出欠相的偵測時間0.000~65.535秒0.50006-47 偵測電流頻帶0.00~655.35% 1.0006-48 偵測輸出欠相的直流制動時間0.000~65.535秒0.10006-49 保留06-50 偵測輸入欠相的時間0.00~600.00秒0.2006-51 保留06-52 偵測輸入欠相漣波230V機種: 0.0~160.0 Vdc460V機種: 0.0~320.0 Vdc30.0/60.006-53 偵測輸入欠相保護之處置方式(OrP)0:警告且減速停車1:警告且自由停車06-54 保留06-55 降載波保護設定0:定額定電流,並依照負載電流及溫度限制載波1:定載波頻率,並依照設定載波限制負載電流2:定額定電流(同設定0),但關閉電流限制06-56 PT100電壓准位元10.000~10.000V 5.000 06-57 PT100電壓准位元20.000~10.000V 7.00006-58 PT100准位元1保護頻率0.00~600.00Hz0.0006-59 保留06-60 軟體偵測GFF電流准位0.0~6553.5 %60.006-61 軟體偵測GFF濾波時間0.0~6553.5 %0.1006-62 dEb禁能准位230V機種: 0.0~220.0 Vdc460V機種: 0.0~440.0 Vdc180.0/360.006-63 故障1發生時的運轉時間(分鐘)0~65535分鐘唯讀06-64 故障2發生時的運轉時間(分鐘)0~65535分鐘唯讀06-65 故障3發生時的運轉時間(分鐘)0~65535分鐘唯讀06-66 故障4發生時的運轉時間(分鐘)0~65535分鐘唯讀06-67 故障5發生時的運轉時間(分鐘)0~65535分鐘唯讀06-68 故障6發生時的運轉時間(分鐘)0~65535分鐘唯讀06-69 運轉天數僅供讀取唯讀06-70 運轉分鐘僅供讀取唯讀06-71 低電流設定準位0~100.0% 0.0 06-72 低電流偵測時間0.00 ~ 655.35秒0.0006-73 低電流發生的處置方式0 : 無功能1 : 報警且自由停車2 : 報警依第二減速時間停車3 : 報警且繼續運轉06-74 低電壓準位2 230V機種:0.0~220.0 Vdc460V機種: 0.0~440.0 Vdc180.0360.0SC-2306-76 dEb動作準位230V機種:0.0~100.0 Vdc460V機種: 0.0~200.0 Vdc20.040.006-80 火災模式(Fire mode)0: 失能1: 正轉運轉2: 反轉運轉06-81 火災模式操作頻率(Hz)0.00 to 600.00Hz 600006-82 火災模式,旁路(Bypass) 致能0: Disable Bypass1: Enable Bypass06-83 火災模式,旁路(Bypass) 延遲時間0.0 to 6550.0 sec 006-84 火災模式的自動重啟動計數器0~10 006-85 自動重啟動計數器時間(s)0.0 to 6000.0 sec 600SC-24SC-2507 特殊參數( 表示可在運轉中執行設定功能)參數碼 參數名稱 設定範圍 初始值備註07-00軟體煞車晶體動作準位元設定 230V 系列:350.0~450.0Vdc 460V 系列:700.0~900.0Vdc380.0 760.007-01 直流制動電流准位 0~100% 0 07-02 啟動時直流制動時間0.0~60.0秒0.0 07-03 停止時直流制動時間0.0~60.0秒0.0 07-04 直流制動起始頻率0.00~600.00Hz 0.00 07-05 電壓增加率0 ~ 200% 100 07-06 暫態停電再啟動 0:停止運轉1:由停電前速度作速度追蹤 2:從最小輸出頻率作速度追蹤07-07 允許停電時間 0.1~20.0秒2.0 07-08 B.B.中斷時間 0.1~5.0秒0.5 07-09 速度追蹤最大電流 20~200% 50 07-10 B.B.動作選擇0:停止運轉1:由BB 前的速度作速度追蹤2:從最小輸出頻率作速度追蹤0 07-11 異常再啟動次數0~10 0 07-12 啟動時速度追蹤 0:不動作1:從最大輸出頻率作速度追蹤2:由啟動時的電機頻率作速度追蹤3:從最小輸出頻率作速度追蹤07-13 暫態停電時減速時間選擇(DEB 功能: Deceleration EnergyBackup)0 : 失效1:依照第一減速時間2:依照第二減速時間3:依照第三減速時間 4:依照第四減速時間5:系統減速 6:自動減速0 07-14 DEB 回復時間 0.0~25.0秒0.0 07-15 齒隙加速停頓時間 0.00∼600.00秒0.00 07-16 齒隙加速停頓頻率 0.00∼600.00Hz0.00 07-17 齒隙減速停頓時間 0.00∼600.00秒0.00 07-18 齒隙減速停頓頻率 0.00∼600.00Hz0.00 07-19冷卻散熱風扇控制方式0:風扇持續運轉1:停機運轉一分鐘後停止2:隨驅動器運轉/停止動作3:偵測溫度到達約60℃後再啟動4:風扇不運轉0 07-20 緊急或強制停機的減速方式0:以自由運轉方式停止1:依照第一減速時間 2:依照第二減速時間3:依照第三減速時間4:依照第四減速時間 5:系統減速 6:自動減速0 07-21 自動節能設定0:關閉1:開啟0 07-22 節能增益 10∼1000%100 07-23 自動調節電壓(A VR )0:開啟A VR 功能1:關閉A VR 功能2:減速時,關閉A VR 功能參數碼參數名稱設定範圍初始值備註07-24 轉矩補償濾波時間(V/F及SVC控制模式)0.001~10.000秒0.02007-25 滑差補償的濾波時間(V/F及SVC控制模式)0.001~10.000秒0.10007-26 轉矩補償增益(V/F及SVC控制模式)0~10 007-27 滑差補償增益(V/F及SVC控制模式)0.00~10.00 0.0007-28 保留07-29 滑差偏差准位0.0~100.0%0:不檢測0.007-30 滑差偏差太大的檢測時間0.0~10.0秒 1.007-31 滑差值偏差太大的處理方式0:警告並繼續運行1:警告並減速停車2:警告並自由停車3:不警告07-32 電機震盪補償因數0~10000 100007-33 異常再起動次數回歸時間0.0~6000.0秒60.007-36 發電滑差補償增益0.00~1.00 1.00 07-37~07-49 保留07-50 PWM風扇速0~100%0~100 60SC-2608 高功能PID參數( 表示可在運轉中執行設定功能)參數碼參數名稱設定範圍初始值備註08-00PID回饋端子選擇0:無功能1:負回授:由模擬輸入(參數03-00)4:正回授:由模擬輸入(參數03-00)08-01 P 增益0.0~500.0% 1.0 08-02 I 積分時間 0.00~100.00秒 1.0008-03 D 微分時間 0.00~1.00秒0.0008-04 積分上限0.0~100.0% 100.0 08-05 PID輸出命令限制0.0~110.0% 100.0 08-06 PID 回授值0.00~200.00% 唯讀08-07 一次延遲 0.0~35.0秒0.008-08 回授異常偵測時間 0.0~3600.0秒0.008-09 回授訊號斷線處理0:警告並繼續運轉1:警告且減速停2:警告且自由停車3:警告且以斷線前頻率運轉08-10 睡眠參考點 0.00∼600.00Hz或 0~200.00% 0.00 08-11 甦醒參考點 0.00∼600.00Hz或 0~200.00% 0.00 08-12 睡眠時間 0.0~600.00秒0.008-13 PID回授訊號異常偏差量1.0∼50.0% 10.008-14 PID回授訊號異常偏差量檢測時間0.1~300.0秒 5.008-15 PID 回授訊號濾波時間0.1~300.0秒 5.008-16 PID 補償選擇0:參數設定1:模擬輸入08-17 PID補償-100.0~+100.0% 008-18 睡眠功能參考源設定0: 參考PID輸出命令1: 參考PID回授訊號08-19 甦醒的積分限制0.0~200.0% 50.0%08-20 PID模式選擇0:串聯1:並聯08-21 允許PID控制改變運轉方向0:不可以改變運轉方向1:可以改變運轉方向08-22 甦醒延遲時間0 ~600.00 sec 0.00SC-2709 通訊參數( 表示可在運轉中執行設定功能)參數碼參數名稱設定範圍初始值備註09-00通訊位址1~254 1 09-01COM1通訊傳送速度 4.8∼115.2Kbps 9.609-02COM1傳輸錯誤處理0:警告並繼續運轉1:警告且減速停車2:警告且自由停車3:不警告並繼續運轉309-03COM1逾時檢出 0.0∼100.0秒0.009-04COM1通訊格式0: 7N1 (ASCII)1: 7N2 (ASCII)2: 7E1 (ASCII)3: 7O1 (ASCII)4: 7E2 (ASCII)5: 7O2 (ASCII)6: 8N1 (ASCII)7: 8N2 (ASCII)8: 8E1 (ASCII)9: 8O1 (ASCII)10: 8E2 (ASCII)11: 8O2 (ASCII)12: 8N1 (RTU)13: 8N2 (RTU)14: 8E1 (RTU)15: 8O1 (RTU)16: 8E2 (RTU)17: 8O2 (RTU)109-05~09-08保留09-09 通訊回應延遲時間0.0~200.0ms 2.0 09-10 通訊主頻0.00~600.00Hz 60.00 09-11 區塊傳輸1 0~65535 0 09-12 區塊傳輸2 0~65535 0 09-13 區塊傳輸3 0~65535 0 09-14 區塊傳輸4 0~65535 0 09-15 區塊傳輸5 0~65535 0 09-16 區塊傳輸6 0~65535 0 09-17 區塊傳輸7 0~65535 0 09-18 區塊傳輸8 0~65535 0 09-19 區塊傳輸9 0~65535 0 09-20 區塊傳輸10 0~65535 0 09-21 區塊傳輸11 0~65535 0 09-22 區塊傳輸12 0~65535 0 09-23 區塊傳輸13 0~65535 0 09-24 區塊傳輸14 0~65535 0 09-25 區塊傳輸15 0~65535 0 09-26 區塊傳輸16 0~65535 0 09-27~09-29保留09-30 通訊解碼方式0: 使用解碼方式11: 使用解碼方式21SC-28。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
回目录
变频器基础知识
模拟输出信号
回目录
11
变频器基础知识
通讯接口
回目录
12
变频器选型要点
电源
断路器 (MCCB)
① 电源 (电源等级选择)
・相数 : 三相 ・电压 : 380~460V AC ・频率 : 50/60Hz ・电源容量 : 应在变频器额定电源容量以上 注意 选择与供电电源和电动机 的额定电压两者相匹配的 电压等级。
・周围温度-10~+50℃、湿度90%RH以下,并且无特殊气体的室内安装。
(VF-8Z型是-10~+40℃)
功率改善 扼流圈
・不要安装在易燃易爆或震动较大的场合。 ・风雨水滴、金属等异物掉入会导致变频器的损坏。
变频器
IP
2
0
水的侵入对 应的保护程 度
带缺相保护 的热继电器
保护结构 人体及固体 的名称 异物对应的 保护程度
High-End System VFD-CH Universal Drive FOC Industrial SVC V/Hz
VFD-E VFD-EL
SVC
VFD-C VFD-VE General Purpose
Industrial High performance CT/VT FOC
VT/CT FOC
30 volt
1ψ 1ψ 3ψ
0.25hp~1hp 0.25hp~3hp 0.25hp~20hp
460 volt
3ψ
0.5hp~30hp
產品特性
輸出頻率0.1~600Hz 模組化設計 內建PLC功能 內建濾波器(230V 1 phase / 460V 3 phase) 支援Fieldbus通訊模組: DeviceNet, Profibus, LonWorks and CANopen DC-BUS可並聯共用 RFI-switch應用於非接地電源系統 可彈性擴充 27 完整保護功能
●功率改善扼流圈 : 需改善功率因素时予以连接。对抑制高次谐波有一定的 效果。
变频器 ●输入滤波器: 对外围设备造成电气干扰时使用。 ●热继电器 : 变频器内置的热敏元件是作为过负载保护之用的。 对于缺相保护,请使用带缺相保护的热敏继电器。
带缺相保护 的热继电器
注意
不要用电源侧或负载侧接装的电磁接触器控制变频器的启动、停止。
電流 输出电压波形
回目录
进相电容 马达 20
台达全系列变频器介绍
变频器原理、基本组成、选项要点、接线要点
回目录
21
台达全系列变频器
台达变频器家族
F/F-G
M
B
EL
VE
L 回目录
C2000
E
22
台达全系列变频器
VFD-C系列
C200系列
C2000系列
CP2000系列 CT2000系列
回目录
23
台达全系列变频器
・电源侧频繁的进行ON/OFF操作会导致变频器发生故障。 ・在变频器运行时负载侧进行ON/OFF操作,会产生很大的冲击电流,导致变频器 异常跳闸。甚至损坏变频器。
马达 马达的启动和停止应使用变频器的运行信号来进行。
回目录
18
变频器选型要点
故 障 如果输出侧安装了电磁接触器(或断路器),在变频器运行中进行ON/OFF操作, 会产生很大的冲击电流,导致变频器损坏。 ・马达的启动和停止应使用变频器的运行信号来进行
注) 为了保护马达,请在各个马达前安装热继电器 In
问题2
用1台变频器切替使用2台以上马达时的注意事项是什么?
电磁接触器 热敏继电器 马达 Th-1 MC1
◆注意事項
电源
IM1
MCCB
变频器 MC2
Th-2 IM2
・应在变频器和马达停止的状态下,进行 马达切替。 ・请不要在变频器运行中进行电磁接触器的 ON/OFF操作。
操 作 面 板
回目录
6
变频器基础知识
变频器的常用术语:
给定频率来源 运行频率来源 减速方式 第一加速时间 第一减速时间 给定频率F 运行频率H 直流母线电压 输出电流 载波频率 过流失速防止 过压失速防止
回目录
7
变频器基础知识
数字输入量
回目录
8
变频器基础知识
模拟输入量
连接微弱的模拟信号,特别容易受外部杂讯干扰影响,所以配线尽可能短(小于20 连接外部的模拟信号输出器时,有时会由于模拟信号输出器或由于交流电机驱动器
IP20
封闭型
马达
•能防止手指或长度不超过80mm的类似物体触及或接近壳内带电或 转动部件。能防止直径大于12mm的固体异物进入壳内。 •对水的侵入无特别防护。 回目录 16
变频器安装方法
1.容许的周围温度 : -10~+50℃
●变频器的寿命受环境温度的影响很大 。 ●不要在通风散热不良的环境中安装变频器。 。 应在容许温度范围内使用 !!
功率改善 扼流圈
・电源电压的容许波动范围为+10%、-15%。 ・过高电压的输入会导致变频器损坏。
变频器
◆電源電圧波形
上限値(※)
高電圧!
损坏!
※上限値=(230V AC+10%)×√2 马达
回目录
13
变频器选型要点
电源
断路器 (MCCB)
② 马达 (额定电压、容量的选择)
・种类 : 三相异步电动机 ・电压 : 200~230V AC / 380~460V AC ・容量 : 0.2、0.4、0.75 ・ ・ ・ kW ・额定电流 : 1.4、2.4、3.6 ・ ・ ・ A 注意 根据变频器的电压选定
2.请垂直安装变频器
●垂直以外的安装会降低变频器的 散热效果,产生问题、故障。
请不要在密 封狭小的空 间中安装!
垂直安装
水平安装
横向安装
3.请避开下列场所
●周围的空间
10cm以上 5cm 以上 变频器 10cm以上 5cm 以上
●日光直射场所。 ●有风雨、水滴、油滴的场所。 ●木材等可燃性材质上安装及靠近可燃物。 ●漂浮油污、粉尘、棉尘的场所 ●发生可燃性气体、腐蚀性气体等的场所。 ●振动大的场所 ●湿度大,有水汽的场所。 湿度在90%以下! 回目录 17
VFD-B
VFD-F VFD-M-D SVC VFD-M VFD-S VFD-L2
SVC
Fan Pump/HVAC VFD-G
Industrial
VFD-L1
VFD-VJ VFD-VL
回目录
25W 100W 200W 1HP 2HP 3 5 24 7.5 10 30 100 300 420 500HP
产生的冲击电流是马达额定电流的6倍以上
变频器
运行中 50Hz
不可!
電磁接触器 (或断路器) ON ⇔ OFF
回目录
19
变频器安装方法
3.注意
注意 ●变频器的输出端请勿安装进相电容器或浪涌制动器。 ●这会导致变频器发生故障或使电容器等受损,如果 已经接上了,请拆除。 变频器 【理由】 变频器的输出电压波形是高电压脉冲波形, 所以在进相电容器冲/放电中会产生过电流!
•國際化的通訊格式MODBUS (RS-485鮑率可達 38400bps) •零速Holding功能 •睡眠/甦醒功能 •支援通訊介面模組:DN-02、LN-01、PD-01 回目录
25
M系列变频器应用范围
打包機、食物加工攪拌機、木工機、貼邊機、溫濕度 控制風扇、磨床等
回目录
26
台达全系列变频器E
28
•載波頻率可達12kHz •內建濾波器 •可併排安裝 回目录
E、EL系列变频器应用范围
食品機、包裝機、壓縮機、帶鋸機、鑽孔機、輸送機 木工機、空調系統、恆壓供水系統、跑步機、紡織機
回目录
29
台达全系列变频器B
Power Ranges
230 volt 460 volt
1ψ 3ψ 3ψ
注意:变频器运行中接通马达,会产生马达额定电流 的6~8倍的电流。
注意
如一定要在变频器运行中进行切换,应充分考 虑由此产生的冲击电流对变频器和马达的影响, 选择 15 容量更大的变频器和马达。
回目录
变频器选型要点
电源
断路器 (MCCB)
③ 变频器的安装环境
・周围温度 : -10~+50℃ ・湿度 : 90%RH以下 ・保护结构 : IP20 / IP00 注意 变频器的寿命受环境温度的影响很大。 请安装在控制箱或机器内,并注意散热。
变频器选型要点
电源
断路器 (MCCB)
④ 变频器外围设备的选择
●断路器 :在选择断路器时,其动作特性应符合变频器电流特性匹配的需要, 避免因变频器接入电源时产生的浪涌而误动作,应使用产品说明书上所推荐 的断路器等级。
功率改善 扼流圈
●电磁接触器 :一般使用时不需要电磁接触器。如果安装了电磁接器,不要 用它控制变频器的启动或停止。
台达全系列变频器M
Power Ranges
115 volt
230 volt
460 volt 575 volt
1ψ 1ψ 3ψ 3ψ 3ψ
0.25Hp~1Hp 0.5Hp~3Hp 0.5Hp~7.5Hp 1.0Hp~10Hp 1.0Hp~10Hp
產品特性
•輸出頻率0.1~400Hz •可設定的V/F曲線 •載波頻率可達15kHz •自動轉矩提升與自動滑差補償功能 •內含PID回授控制
回目录
台达全系列变频器EL
Power Ranges
115 volt 230 volt
1ψ 1ψ 3ψ
0.25hp~1hp 0.25hp~3hp 0.25hp~5hp
460 volt
3ψ
0.5hp~5hp