基于改进Sobel算子的红外图像边缘提取算法
基于Sobel算子图像边缘检测的MATLAB实现
基于Sobel算子图像边缘检测的MATLAB 实现作者:吴术路来源:《电脑知识与技术》2010年第19期摘要:边缘检测在数字图像处理中有着重要的应用。
边缘是图像的最基本特征。
该文利用Sobel算子对图像进行水平和垂直的边缘提取,并对图像进行MATLAB仿真比较,仿真实验表明,该方法对图像边缘的检测精度较高,抗噪声能力强,提高了图像边缘检测效果。
关键词:边缘检测;Sobel算子;MATLAB中图分类号:TP391文献标识码:A文章编号:1009-3044(2010)19-5314-02Based on Sobel Edge Detection Operator of MATLAB ImplementationWU Shu-lu(Qinghai & TV University, Xi'ning 810008, China)Abstract: Edge detection in the digital image processing has important applications. Edge is the most basic features of the image. In this paper, Sobel operator to the image horizontal and vertical edge detection, and image comparison MATLAB simulation, simulation experiments show that the method has high precision in image detection, anti-noise ability and improving the image edge detection.Key words: edge detection; sobel operator; MATLAB边缘检测技术对于数字图像非常重要,边缘是所要提取目标和背景的边界线,提取出边缘才能将目标和背景区分开。
图像边缘提取
图像边缘提取图像的边界信息⼀般通过灰度值突变来体现,所以图像边缘提取⼀般通过捕捉灰度突变的⽅法来实现,捕捉灰度突变可以通过求微分来实现导数越⼤说明变化越⼤,边缘信号越强1.Sobel算⼦也叫离散微分算⼦,⼀阶微分算⼦,求导算⼦,先做⾼斯平滑在做微分求导可以在各个⽅向上求图像的梯度如⽔平⽅向 Gx=[-1,0,1,-2,0,2,-1,0,1],垂直⽅向Gy=[-1,-2,-1,0,0,0,1,2,1]最终G=sqrt(Gx^2+Gy^2),或者G=|Gx|+|Gy|第⼆种的运算速度要快于第⼀种,所以⼀般采⽤第⼆种⽅法Sobel算⼦的改进版叫Scharr算⼦[-3,0,3,-10,0,10,-3,0,3]#include<iostream>#include<opencv2/opencv.hpp>using namespace std;using namespace cv;int main(int argc, char **argv){Mat src, dst;src = imread("b.png");if (src.empty()){cout << "load img failed" << endl;return -1;}imshow("input img", src);Mat gaussian,gray_src;GaussianBlur(src, gaussian, Size(3, 3), 0, 0);cvtColor(gaussian, gray_src, CV_BGR2GRAY);imshow("blur gray", gray_src);Mat xgrad, ygrad;Sobel(gray_src, xgrad, CV_16S, 1, 0, 3);Sobel(gray_src, ygrad, CV_16S, 0, 1, 3);convertScaleAbs(xgrad, xgrad);convertScaleAbs(ygrad, ygrad);imshow("x grade", xgrad);imshow("y grade", ygrad);addWeighted(xgrad, 0.5, ygrad, 0.5, 0, dst);imshow("output img", dst);/*dst = Mat(xgrad.size(), xgrad.type());int width = dst.cols;int height = dst.rows;for(int i=0;i<height;++i)for (int j = 0; j < width; ++j){int xg = xgrad.at<char>(i, j);int yg = ygrad.at<char>(i, j);int xy = xg + yg;dst.at<char>(i, j) = saturate_cast<uchar>(xy);}imshow("output img", dst);*/waitKey(0);return0;}plance算⼦求⼆阶导数,在⼆阶导数的时候,最⼤变化处的值为0,即边缘的⼆阶导数是0流程:⾼斯模糊去噪GaussianBlur()转为灰度值cvtColor()Laplance⼆阶导数计算Laplancian()取绝对值convertScaleAbs()显⽰结果#include<iostream>#include<opencv2/opencv.hpp>using namespace std;using namespace cv;int main(int argc, char **argv){Mat src, dst;src = imread("b.png");if (src.empty()){cout << "load img failed" << endl;return -1;}imshow("input img", src);Mat gaussian,gray_src;GaussianBlur(src, gaussian, Size(3, 3), 0, 0);cvtColor(gaussian, gray_src, CV_BGR2GRAY);imshow("blur gray", gray_src);Laplacian(gray_src, dst, CV_16S,3);convertScaleAbs(dst, dst);imshow("Laplacian", dst);threshold(dst, dst, 0, 255, THRESH_OTSU | THRESH_BINARY);imshow("output img", dst);/*dst = Mat(xgrad.size(), xgrad.type());int width = dst.cols;int height = dst.rows;for(int i=0;i<height;++i)for (int j = 0; j < width; ++j){int xg = xgrad.at<char>(i, j);int yg = ygrad.at<char>(i, j);int xy = xg + yg;dst.at<char>(i, j) = saturate_cast<uchar>(xy);}imshow("output img", dst);*/waitKey(0);return0;}3.Canny边缘检测步骤:⾼斯模糊 GaussianBlur灰度转换cvtColor计算梯度Sobel/Scharr⾮最⼤信号抑制⾼低阈值输出⼆值图像⾮最⼤信号抑制需要计算梯度⽅向T1为低阈值,T2为⾼阈值,凡是⾼于T2的都保留,凡是低于T1的都丢弃,从⾼于T2的像素出发,凡是⼤于T1且相互连接的都保留,最终得到⼀个输出⼆值图像推荐的⾼低阈值⽐为3:1或2:1Canny(src,dst,threshold_low,threshold_high,Sobel_size,Lwgradient)最后⼀个如果是true就⽤L2归⼀化(开根),如果不是就L1归⼀化(绝对值),⼀般⽤L1 #include<iostream>#include<opencv2/opencv.hpp>using namespace std;using namespace cv;Mat src, dst, gray_src, gaussian;int t1_value = 50;int max_value = 255;const char* OUTPUT_TITLE = "Canny Result";void Canny_Demo(int,void*);int main(int argc, char **argv){//Mat src, dst;src = imread("b.png");if (src.empty()){cout << "load img failed" << endl;return -1;}imshow("input img", src);//Mat gaussian,gray_src;//GaussianBlur(src, gaussian, Size(3, 3), 0, 0);namedWindow(OUTPUT_TITLE, CV_WINDOW_AUTOSIZE);cvtColor(src, gray_src, CV_BGR2GRAY);createTrackbar("Threshold Value :", OUTPUT_TITLE, &t1_value, max_value, Canny_Demo);Canny_Demo(0, 0);waitKey(0);return0;}void Canny_Demo(int, void*){Mat edge_output;blur(gray_src, gray_src, Size(3, 3), Point(-1, -1), BORDER_DEFAULT);Canny(gray_src, edge_output, t1_value, t1_value * 2, 3, false);//dst.create(src.size(), src.type());//src.copyTo(dst, edge_output);imshow(OUTPUT_TITLE, ~edge_output);}去掉注释会变成彩⾊图,注意修改imshow中的输出变量。
Matlab实现:图像边缘提取

Matlab实现:图像边缘提取1、边缘提取算法⽅法⼀:⼀阶微分算⼦Sobel算⼦Sobel算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好,Sobel算⼦对边缘定位不是很准确,图像的边缘不⽌⼀个像素。
Roberts算⼦Roberts算⼦检测⽅法对具有陡峭的低噪声的图像处理效果较好,但是利⽤roberts算⼦提取边缘的结果是边缘⽐较粗,因此边缘的定位不是很准确。
Prewitt算⼦Prewitt算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好。
但边缘较宽,⽽且间断点多。
Canny算⼦Canny算⼦是⽬前边缘检测最常⽤的算法,效果也是最理想的。
Canny⽅法不容易受噪声⼲扰,能够检测到真正的弱边缘。
优点在于,使⽤两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
⽅法⼆:⼆阶微分算⼦Laplacian算⼦Laplacian算⼦法对噪声⽐较敏感,所以很少⽤该算⼦检测边缘,⽽是⽤来判断边缘像素视为与图像的明区还是暗区。
2、实验结果分析⼀、边缘提取:Sobel算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好,sobel算⼦对边缘定位不是很准确,图像的边缘不⽌⼀个像素;Roberts算⼦检测⽅法对具有陡峭的低噪声的图像处理效果较好,但是利⽤roberts算⼦提取边缘的结果是边缘⽐较粗,因此边缘的定位不是很准确;Prewitt算⼦检测⽅法对灰度渐变和噪声较多的图像处理效果较好。
但边缘较宽,⽽且间断点多;Laplacian算⼦法对噪声⽐较敏感,所以很少⽤该算⼦检测边缘,⽽是⽤来判断边缘像素视为与图像的明区还是暗区;Canny⽅法不容易受噪声⼲扰,能够检测到真正的弱边缘。
优点在于,使⽤两种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘和强边缘相连时,才将弱边缘包含在输出图像中。
⼆、边缘复合增强Sobel、Robert、Prewitt算⼦的增强效果并不是很明显,尤其是Robert算⼦,因为它提取的边缘点过于稀疏和离散;Laplacian算⼦和canny算⼦的增强效果都⽐较理想,将边缘叠加上去后,整个⼿的轮廓和边缘都很清晰,直观上看,canny算⼦实现的效果⽐Laplacian算⼦好,最明显的地⽅就是⼿指尖的边缘。
基于图像增强的边缘检测方法

n与n i 和 进行比较,比值分别记为 一 [i ,如果两个比值均大于 ( 为一常数 ) 1J +  ̄k 1 ,则对此范 围内的象素进行灰度变换 ,如果 f <05; f . 则根据公式 :
:1 = =
( ‘ )。 z 而 +・ 一 5
( 1 )
将低灰度级区间拉伸到相对较宽和较高的灰度级范围内。( 。 Z 代表 目标灰度级范围,Z 代表十等分后的
收稿 日期 :2 0—92 0 60—8
基 金项 目:四川省 教 育厅青 年基金 项 目 ( 04 1 ) 2 0B08
作者简介:陈吕强 ( 92 ) 18一,男,安徽淮北人,硕士生,主要从事图像处理及模式识别方面的研究。
维普资讯
7 8
四 J理工 学 院学报 (自然科 学 版 ) l l
文章 编号 :17 — 59(0 7)0~ 07 0 6 3 14 20 2 07 —4
基 于图像增强的边缘检测方法
陈 吕强 ,杨平先 ,李奇琳 ,孙兴 波
(. 1 四川理工学院电子与电信工程 系,四川 自 6 30 ;2 贡 400 . 成都农业科技职业学院,成都 6 13 ) 110
1改进 的边 缘 检 测 算 法
11 图像 自适 应增 强算 法 .
图像增强在图像 的预处理中具有重要作用 ,它的 目的是提高低对 比度图像的质量 ,扩大 目 标与背 景之间的灰度差值 。 对于一幅数字图像来说 , 如果物体边缘没有与其相邻物体形成明显的灰度对比, 那么有可能在边缘检测 中将一些物体的边缘漏检 。为了更好的检测一幅图像 的细节边缘 ,采用图像的
维普资讯
第2 卷 第2 Biblioteka 期 20 0 7年 4月
四川理工学院学报 (自 然科 学版 )
基于改进的Sobel算子边缘检测算法
基于改进的Sobel算子边缘检测算法沈德海;侯建;鄂旭【摘要】为了解决传统的Sobel算子算法存在的斜向方向不敏感问题,提出了一种改进的Sobel算法。
该算法在Sobel 算子的基础上,增加了45º和135º2个方向模板,并且以斜向边缘为主重新分配了算子模板的权重。
算法先将图像转换为灰度图像,然后用改进的Sobel算子得到梯度图像,再采用局部梯度阈值对梯度图像进行细化处理,最后结合斜向边缘方向域值进行二值化,得到边缘图像。
仿真实验表明,与传统Sobel算法相比,该算法提高了检测精度,使得边缘细节更丰富、更连续。
%An improved Sobel algorithm is proposed to overcome the disadvantage,which the traditional Sobel operator algorithm is insen-sitive for the diagonal directions. The algorithm increases two templates in both directions of 45 o and 135 o ,and reallocates operator tem-plate weight according to diagonal edge. The algorithm first converts the image to grayscale image,and then obtains the gradient image with the improved Sobel operator,then refines the gradient image with local gradient threshold values,finally the algorithm binaries the image according to the direction toward combining selected threshold. Simulation result shows that the algorithm has a higher detection accuracy,achieves more rich and more continuous edge than traditional Sobel algorithm.【期刊名称】《计算机技术与发展》【年(卷),期】2013(000)011【总页数】4页(P22-25)【关键词】边缘检测;Sobel算子;斜向边缘【作者】沈德海;侯建;鄂旭【作者单位】渤海大学信息科学与技术学院,辽宁锦州 121013;渤海大学信息科学与技术学院,辽宁锦州 121013;渤海大学信息科学与技术学院,辽宁锦州121013【正文语种】中文【中图分类】TP391.410 引言图像边缘是图像灰度变化最显著的区域或边界,主要存在于不同的目标、背景及区域之间,是图像分析工作(如图像分割、纹理和形状特征提取等)的重要基础。
基于Sobel算子的医学图像边缘检测研究
基于Sobel算子的医学图像边缘检测研究沈德海;鄂旭;张龙昌【摘要】边缘检测是图像处理过程的关键技术.由于医学图像的特殊性,检测边缘的准确性对疾病的诊断和治疗有着重大的影响.针对传统Sobel算法存在定位不精确、提取边缘较粗等不足,提出了一种改进算法.算法在传统Sobel算子模板基础上增加了45°方向和135°方向两个模板,提高了边缘定位的精度,采取局部梯度均值作为阈值对初始梯度图像进行局部梯度筛选,局部弱边缘得到增强,然后对处理后梯度图像进行细化和提取,得到边缘图像.实验证明,算法获取的图像边缘与传统Sobel算法相比,具有定位准确、边连续性好和边缘较细等优点,在医学图像处理中具有一定的实用性.【期刊名称】《电子设计工程》【年(卷),期】2015(023)007【总页数】4页(P141-144)【关键词】医学图像;边缘检测;Sobel算子;细化【作者】沈德海;鄂旭;张龙昌【作者单位】渤海大学信息科学与技术学院,辽宁锦州121013;渤海大学信息科学与技术学院,辽宁锦州121013;渤海大学信息科学与技术学院,辽宁锦州121013【正文语种】中文【中图分类】TN911.73图像的边缘是指其周围像素灰度发生阶跃变化或屋顶形状变化的像素的集合[1],边缘检测就是确定和提取图像中目标物体的边界信息,为后续分析和处理提供重要的依据。
医学图像由于成像的特殊性,与普通图像不同,其本质上具有模糊性和不均匀性[2],例如,CT图像中,同一组织中的信号值会出现较大幅度变化;由于局部体效应,一些病变组织由于侵袭周围组织,造成边缘确定较难。
另外,由于医学图像采集过程中不可避免受到一些噪声的干扰,造成图像清晰度的降低,边缘往往不清晰,提取时会出现虚假边缘[3],为了提高诊断的精确性,治疗的有效性,医学图像的检测边缘必须要轮廓清晰,细节尽可能少丢失,边缘细锐,因此探究良好的边缘检测算法意义十分重大。
图像边缘检测算法一直是国内外众多学者研究的热点之一,总体上分为以下两大类:一类是传统边缘检测方法,如Roberts、Sobel、Laplacian、Prewitt、Canny、形态学算子[4]及小波变换[5]等。
sobel算子
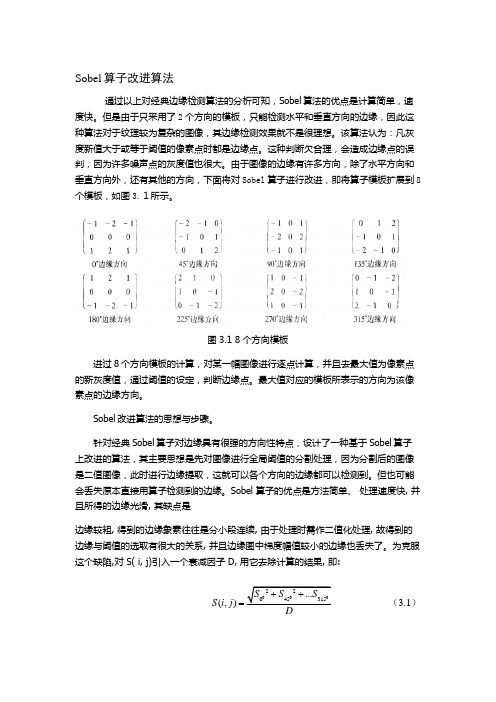
Sobel算子改进算法通过以上对经典边缘检测算法的分析可知,Sobel算法的优点是计算简单,速度快。
但是由于只采用了2个方向的模板,只能检测水平和垂直方向的边缘,因此这种算法对于纹理较为复杂的图像,其边缘检测效果就不是很理想。
该算法认为:凡灰度新值大于或等于阈值的像素点时都是边缘点。
这种判断欠合理,会造成边缘点的误判,因为许多噪声点的灰度值也很大。
由于图像的边缘有许多方向,除了水平方向和垂直方向外,还有其他的方向,下面将对Sobel算子进行改进,即将算子模板扩展到8个模板,如图3.1所示。
图3.1 8个方向模板进过8个方向模板的计算,对某一幅图像进行逐点计算,并且去最大值为像素点的新灰度值,通过阈值的设定,判断边缘点。
最大值对应的模板所表示的方向为该像素点的边缘方向。
Sobel改进算法的思想与步骤。
针对经典Sobel算子对边缘具有很强的方向性特点,设计了一种基于Sobel算子上改进的算法,其主要思想是先对图像进行全局阈值的分割处理,因为分割后的图像是二值图像,此时进行边缘提取,这就可以各个方向的边缘都可以检测到。
但也可能会丢失原本直接用算子检测到的边缘。
Sobel 算子的优点是方法简单、处理速度快, 并且所得的边缘光滑, 其缺点是边缘较粗, 得到的边缘象素往往是分小段连续, 由于处理时需作二值化处理, 故得到的边缘与阈值的选取有很大的关系, 并且边缘图中梯度幅值较小的边缘也丢失了。
为克服这个缺陷,对 S( i, j)引入一个衰减因子 D, 用它去除计算的结果, 即:(,)S i j=(3.1)因此,用处理后的所得到图像与Sobel 算子直接对原始图像进行边缘检测的图像相加,这一步显得尤为重要。
最后分别对数字图像和红外图像进行MATLAB 仿真,从仿真的结果可以看出,此算法具有较好的精度。
三次样条插值Sobel 算子检测出像素级边缘后,为了得到亚像素级的边缘,要对灰度边缘图进行内插处理。
插值算法有很多种,例如最近邻插值、双线性插值、三次样条插值等等。
基于改进sobel算法的叶片图像边缘检测
基于改进Sobel算法的叶片图像边缘检测张辉,马明建(山东理工大学农业工程与食品科学学院,山东淄博255049)摘要:采用数字图像处理技术对叶片图像进行边缘检测,主要研究了基于s obel算子的叶片边缘的检测方法。
在对图像进行灰度化和滤波去噪等预处理的基础上。
增加了6个方向模板对s obel算子进行改进。
试验证明,该方法有效解决了S0bel算子边缘检测时边缘过粗的问题,得到的边缘较细,精确度提高了13.6%。
关键词:边缘检测;叶片;s obel算子中圈分类号:S126:T F玛91.41文献标识码:A文章编号:1003—188X(2012J05—0046—03续表l0引言在图像分析和处理中,边缘是图像分割的重要依据,又是许多图像高层处理(如图像理解和识别等)的重要前提,因此图像边缘检测的好坏将直接影响后续处理的精度和效果…。
在几种经典的边缘检测算子中,s obel算子方法简单、处理速度快,并且所得的边缘光滑、连续。
但它能检测的方向有限,抗噪能力比较低,这也给它的使用带来局限性。
为此,本文针对农业叶片图像边缘检测中的问题,提出了一种改进的基于s obe l算子的边缘提取算法,使得检测的方向和精度都得到了提高。
1经典边缘检测算子存在的问题目前,经典的边缘检测算子都有:S obel,R obens,Pr e w i n,G auss Lapl ace,C aI l ny等算子忙1。
对图像进行边缘检测时,运算速度与选取的模块大小有直接关系:模块越大,检测效果越明显,速度越慢;反之则效果差一点,但速度提高很多。
其次,抑制噪声和边缘精确定位是无法同时满足的,以下是各个算子的特点,如表1所示。
表1边缘榆测算子的特点边缘检测箅子算子特点s obe I算子采用加权滤波,边缘清晰且较细。
产生断点,产生伪边缘Pr e w i t t算子采用平均滤波,边缘较宽,断点多。
产生伪边缘收稿日期:20l l一06—28基金项目:山东省自然科学基金项目(2003ZX l O)作者简介:张辉(1986一),男,山东淄博人,硕士研究生,(E—m B i l) 148089452@163.com。
基于Sober算子的图像边缘检测
1 引言图像边缘是一种重要的视觉信息,图像边缘检测是图像处理、图像分析、模式识别、计算机视觉以及人类视觉的基本步骤。
其结果的正确性和可靠性将直接影响到机器视觉系统对客观世界的理解。
实现边缘检测有很多不同的方法,也一直是图像处理中的研究热点,人们期望找到一种抗噪强、定位准、不漏检、不误检的检测算法。
经典的算法中主要用梯度算子,最简单的梯度算子是Roberts算子,比较常用的有Prewitt算子和Sober算子,其中Sober算子效果较好,但是经典Sober算子也存在不足,其边缘具有很强的方向性,只对垂直与水平方向敏感,其他方向不敏感,这就使得那些边缘检测不到j。
对后续的图像处理有很的影响。
本文在此基础提出了一种新的算法,该算子该算法提高了传统Sober检测算子的性能,具有良好的检测精度。
对数字图像{f(x,y)}的每个像素,考察它上下左右邻点灰度的加权差,与之接近的邻点的权大。
据此,定义Sober算子如下:其卷积算子:适当取门限TH,作如下判断:s(i,j)>TH,(i,j)为阶跃状边缘点,{s(i,j)}为边缘图像。
Sober算子很容易在空问上实现,Sober边缘检测器不但产生较好的边缘检测效果,而且受噪声影响也比较小。
当使用大的邻域时,抗噪性能会更好,但这样会增加计算量,并且得出的边缘也会相应变粗。
Sober算子利用像素点上下、左右邻点的灰度加权算法,根据在边缘点处达到极值这一现象进行边缘的检测。
Sober算子对噪声具有平滑作用,提供较为精确的边缘方向信息,是一种较为常用的边缘检测方法。
2 算法设计针对经典Sober算子对边缘具有很强的方向性特点,提出了一种在Sober算子上改进的算法,其主要思想是先对图像进行全局阈值的分割处理,因为分割后的图像是二值图像,此时进行边缘提取,这就可以使各个方向的边缘都可以检测到。
但也可能会丢失原本可直接用Sober算子检测到的边缘。
因此,用处理后所得的图像与用Sober算子直接对原始图像进行边缘检测的图像相加,这一步就得尤为重要。
sobel算子的基本理论及改进算法~

Sobel 锐化算子及其改进算法0908112 07 史清一、锐化的基本理论1、问题的提出在图像增强过程中,通常利用各类图像平滑算法消除噪声,图像的常见噪声主要有加性噪声、乘性噪声和量化噪声等。
一般来说,图像的能量主要集中在其低频部分,噪声所在的频段主要在高频段,同时图像边缘信息也主要集中在其高频部分。
这将导致原始图像在平滑处理之后,图像边缘和图像轮廓模糊的情况出现。
2、锐化的目的为了减少这类不利效果的影响,就需要利用图像锐化技术,使图像的边缘变得清晰。
图像锐化处理的目的是为了使图像的边缘、轮廓线以及图像的细节变得清晰,经过平滑的图像变得模糊的根本原因是因为图像受到了平均或积分运算,因此可以对其进行逆运算(如微分运算)就可以使图像变得清晰。
从频率域来考虑,图像模糊的实质是因为其高频分量被衰减,因此可以用高通滤波器来使图像清晰。
但要注意能够进行锐化处理的图像必须有较高的性噪比,否则锐化后图像性噪比反而更低,从而使得噪声增加的比信号还要多,因此一般是先去除或减轻噪声后再进行锐化处理。
图像锐化处理的主要目的是突出图像中的细节或者增强被模糊化了的细节,一般情况下图像的锐化被用于景物边界的检测与提取,把景物的结构轮廓清晰地表现出来。
3、重点明确图像锐化的目的是加强图像中景物的细节边缘和轮廓。
锐化的作用是使灰度反差增强。
因为边缘和轮廓都位于灰度突变的地方。
所以锐化算法的实现是基于微分作用。
4、图像锐化的方法一阶微分锐化方法;二阶锐化微分方法。
5、一阶微分锐化的基本原理一阶微分计算公式:f'(x,y)-—x y离散之后的差分方程:f (i,j) [f (i 1,j) f(i,j)] [f(i,j 1) f(i,j)]考虑到图像边界的拓扑结构性,根据这个原理派生出许多相关的方法。
故一阶微分锐化又可分为单方向一阶微分锐化和无方向一阶微分锐化,后者又包括交叉微分锐化、Sobe锐化、Priwitt锐化。
6无方向一阶微分锐化问题的提出及设计思想单方向的锐化处理结果对于人工设计制造的具有矩形特征物体(例如:楼房、汉字等)的边缘的提取很有效。
一种新的热红外影像边缘检测方法
一种新的热红外影像边缘检测方法张振鑫;夏清;王跃宾;崔言辉;陈亚凯【摘要】To solve the problem of fuzzy edge information,weak contrast,image noise and difficult to extract thermal infrared image edge by the traditional methods,an edge detection method is proposed by combining multi-level trape-zoidal fuzzy enhancement,fuzzy C-means clustering and Sobel operator.Firstly,multi-level trapezoidal fuzzy enhance-ment is applied in thermal infrared image,then the interesting temperature zone of thermal infrared is classified by u-sing fuzzy C-means clustering to extract the object,finally the edge of the target is detected by Sobel operator.Based on MATLAB,the result shows that the method has higher detection accuracy.It can detect edge information of fuzzy image,and can extract detail information which other methods can’t extract.It obtains single pixel edge and has a small amount of calculation.The method has an ideal effect.%针对热红外影像中感兴趣温度区边缘信息模糊、对比度弱、影像存在噪声,传统的边缘检测方法难以实现边缘提取的问题,同时考虑到热红外影像边缘的不确定性,提出了一种将多层次梯形模糊增强、模糊C均值聚类以及与Sobel算子相结合的边缘检测方法。
基于改进的四叉树Sobel算子图像分割研究

p o e t e ca t ft e i g e e g e e t t n s a f cie me o f ma e s g e tt n rv h l r y o ma d e s g n ai ,i n e e t t d o g e i h m o v h i m n ai . o
红外图像处理算法的研究
论文题目:红外图像处理算法的研究专 业:信号与信息处理硕 士 生:黄庆华 (签名) 指导教师:吴延海 (签名)摘 要随着现代红外技术的快速发展,民用红外监控系统及军用红外探测系统得到了广泛的应用。
由于红外摄像器件本身及探测环境影响,成像效果并不理想。
在实际应用中,需要对获得的红外图像进行必要的增强处理,使其更适于人眼观察。
同时利用对红外目标的检测、分割来确定不易辨认的目标物,为后续的识别与智能控制等奠定基础。
本文首先介绍了红外成像机理,在分析了红外图像特点的基础上,比较了几种经典红外图像增强算法。
根据红外成像具有图像模糊、噪声大等特点,提出了将平台直方图均衡与增强高通滤波结合的红外图像处理算法。
实验结果表明,该算法能够增强图像目标、有效的抑制噪声,具有较好的视觉效果。
图像分割是图像处理的重要环节,本文在分析了几种经典图像分割算法的基础上,主要研究了边缘检测和阈值分割算法。
针对边缘检测只显示目标轮廓,边缘线条较多且不连续,而阈值分割则忽略了目标与目标之间的边缘细节问题,本文提出了一种新的红外图像分割算法。
该算法使用Sobel算子进行边缘检测,同时利用改进的Otsu进行阈值分割,然后对两幅图像进行融合。
实验证明分割后的图像目标轮廓清晰,图像边缘细节特征明显,有利于图像的特征提取、目标识别等。
关 键 词:红外图像处理;平台直方图均衡;边缘检测;改进的Otsu法研究类型:理论研究Subject :Research on Algorithm for Infrared Image Processing Specialty:Signal and Information ProcessingName :Huang Qinghua (Signature)Instructor:Wu Yanhai (Signature)ABSTRACTWith the fast development of the infrared technology, infrared monitor system is widely used in civil and military fields. Because of the limitations of infrared monitor and the affection of the environment, the quality of infrared imaging is not such satisfactory. In practical application, image enhancement technology is benefit to view of the obtained image. Meanwhile, undistinguished target can be confirmed by detection and segmentation, providing foundations for the following identification and intelligent control.Firstly, infrared imaging mechanism is introduced. Based on analyzing the characteristics of infrared image, some classic infrared image enhancing algorithms are compared. According to such characteristics as blurred image and high noise, a new algorithm combining platform histogram equalization with enhanced high-pass filtering is proposed. The results show that the algorithm can enhance the object and restrain noise of infrared image, achieving better visual effect.The segmentation of infrared image is a part in infrared image processing. Edge detection and Otsu is studied in depth based on the analyzing of some segmentation methods. To solve the shortcomings of edge detection and Otsu, a new segmentation algorithm is proposed in this paper. In this algorithm, edge detection and image segment are performed by Sobel operators and improved Otsu, respectively. Experimental results show that the contour of the segmented image is clear; the characteristic of the edge detail is evident. The algorithm is benefit to infrared image feature extraction and target recognition.Key Words: Infrared image processing Platform histogram equalizationEdge detection Modified Otsu principleThesis :Basic Research目 录1绪论 (1)1.1研究背景和意义 (1)1.2国内外研究现状及发展趋势 (2)1.3本论文的主要工作及内容安排 (4)2 红外图像的产生及特征 (5)2.1红外图像的产生机理及特点 (5)2.2红外图像直方图 (7)2.2.1直方图的定义及特点 (7)2.2.2红外图像直方图 (9)2.3红外图像的对比度及分辨率 (10)2.4红外图像的噪声分析 (10)2.5本章小结 (10)3 红外图像增强 (11)3.1红外图像的成像模型 (11)3.2基于经典的红外图像处理 (13)3.2.1灰度级修正 (13)3.2.2直方图变换 (15)3.2.3图像平滑 (17)3.2.4图像锐化 (20)3.2.5其他常用的红外图像增强处理算法 (20)3.3改进的红外图像增强算法 (21)3.3.1平台直方图均衡化法 (22)3.3.2增强高通滤波算法 (23)3.3.3 改进的红外图像增强算法 (25)3.4实验结果与分析 (25)3.5本章小结 (27)4 红外图像分割 (28)4.1图像分割的概念和分类 (28)4.2红外图像的分割算法 (29)4.2.1边缘检测的图像分割算法 (29)4.2.2灰度阈值分割算法 (37)4.3改进的图像分割算法 (41)4.3.1灰度梯度映射函数 (41)4.3.2改进的Otsu算法 (43)4.3.3 Sobel边缘检测与改进的Otsu算法结合 (45)4.4实验结果与分析 (46)4.5本章小结 (48)5 结论 (49)5.1总结 (49)5.2展望 (49)致谢 (51)参考文献 (52)附录 (55)1 绪论随着红外技术日新月异的发展,它在军事及人们日常生活中有着越来越广泛的应用。
基于Sobel 算子的金相图边缘提取新算法

基于Sobel 算子的金相图边缘提取新算法单陇红【期刊名称】《计算技术与自动化》【年(卷),期】2016(035)004【摘要】针对传统 Sobel算法存在定位不精确、提取边缘不连续等不足,提出在传统Sobel 算子模板基础上增加了45°和135°两个模板,提高了边缘定位的精度;采用局部梯度均值作为阈值对梯度图像进行局部梯度筛选,然后进行边缘提取及细化。
实验证明,算法获取的图像边缘与传统 Sobel 算法相比,具有定位准确、边缘连续性好、噪声少等优点,在金相图片处理中有一定的实用性。
%Aiming atthe deficiency of traditional Sobel algorithm,such as impreciselocation,inconsecutive edge in pro-cessing,an improved algorithm was put forward,The algorithm added two templates in both directions of 45°and 135°based on traditional sobel operator to improve the precision of edge location.Local gradient was filtered to gradient image by using local gradient mean as the threshold,then edge extraction and refinement were done.The experiment suggests that,com-pared with traditional Sobel algorithm,the image edge obtained by the new algorithm has the advantage of accurate location, good continuity of the edge and few noise,etc.So,the algorithm has certain practicability in the processing of metallography film.【总页数】4页(P81-84)【作者】单陇红【作者单位】兰州理工大学机电工程学院,甘肃兰州 730050【正文语种】中文【中图分类】TP391【相关文献】1.基于Sobel算子的医学图像边缘提取算法的DSP编程设计与实现 [J], 王小东;赵仁宏;季超;蔡占秀;邱召运2.一种基于Sobel算子的新型边缘提取技术 [J], 赵来刚;陈道炯3.基于改进Sobel算子的红外图像边缘提取算法 [J], 夏清;张振鑫;王婷婷;王亚云;石娟娟4.一种基于改进Sobel算子的苹果图像边缘提取算法的研究 [J], 陈浩;黄勋;赵志明5.基于Sobel算子的多尺度边缘提取算法 [J], 周学海;张伍因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进Sobel算子的实时边缘检测及其FPGA实现

• 118•基于改进Sobel算子的实时边缘检测及其FPGA实现四川大学电子信息学院 代临风 邓洪敏提出了一种改进的Sobel 算子:在传统Sobel 算子的基础上,使用快速中值滤波滤除系统杂波、加入旋转模式下的CORDIC (Co-ordinate Rotation Digital Computer )算法,增加了Sobel 算子的模板数,使系统的检测精度提高、并利用双滤波器求出局部图像像素点的均值作为自适应阈值,提高了检测算法在局部图像特性上的适应性。
最后,将所提算法运用到FPGA 处理平台上,并进行图像边缘检测的验证。
实验结果表明,该方法提取得到的边缘更加精细,局部特性更好,抗噪声能力更强,且由于FPGA 的高主频和并行性,硬件资源的占用率大大降低,系统整体处理时间大大减少。
引言:随着电子、计算机领域工程技术的迅猛发展,图像边缘检测已经成为图像处理技术中关键的一项。
图像边缘是图像的基本特征([1]陆小锋,张俊豪,陆晓成,等.基于FPGA 的图像分块实时边缘检测系统[J].电视技术,2012,36(21):51-54),图像的边缘区域集中着大量的图像信息,具有不确定性,是图像中属性变换最为剧烈的一部分。
在许多的工程应用中我们都会用到图像的边缘处理作为基础从而进行之后的更为高级的图像处理,比如:人脸识别、车牌识别、手写体识别等。
在研究边缘检测算法时,通常采用基于图像强度的一阶或二阶导数,根据其变化规律和一定的检测规则,判定图像的边缘。
常见的边缘检测算子有Robert 算子,Sobel 算子、Prewitt 算子、Laplacian 算子、LOG 算子、Canny 算子等([2]米曾真,谢志江,陈涛,等.重轨图像增强与边缘提取的关键技术[J].光学精密工程,2012,20(7):1645-1652)。
但是导数很容易受到噪声的影响([5]毛星云,冷雪飞,等.OpenCV3编程入门[M].北京:电子工业出版社),因此必须在边缘检测算子中加入滤波器用以抑制噪声。
基于Sobel算子边缘检测的仪表盘二值化阈值算法
基于Sobel算子边缘检测的仪表盘二值化阈值算法摘要:在工业生产中,仪表盘是一个重要的控制工具,在仪表盘上经常需要进行类似温度、压力、电流等参数的测量,而测量过程中需要将仪表盘上的指针位置转化为数字进行处理,因此需要进行仪表盘的二值化处理。
本文基于Sobel算子边缘检测提出了一种仪表盘二值化阈值算法,能够有效地将仪表盘上的指针位置进行提取。
关键词:Sobel算子,边缘检测,仪表盘,二值化阈值正文:仪表盘是一种常见的工业生产控制工具,通过读取仪表盘上的指针位置来进行温度、压力、电流等参数的测量。
因此仪表盘的二值化处理是仪表盘数字化的重要步骤。
仪表盘的二值化处理,其基本原理是将仪表盘图像中的背景和指针区分开来,使指针的位置可以被提取。
本文提出了一种基于Sobel算子边缘检测的仪表盘二值化阈值算法。
该算法使用Sobel算子对仪表盘进行边缘检测,然后将检测到的边缘进行二值化处理。
Sobel算子是一种常用的边缘检测算法,它对灰度图像的边缘有很好的响应,通过设置不同的阈值可以检测出不同程度的边缘信息。
该算法首先将仪表盘图像转换为灰度图像,然后使用Sobel算子进行边缘检测,然后根据不同的阈值将检测到的边缘信息二值化。
最后根据转化后的二值化图像来提取指针位置。
实验结果表明,该算法能够有效地提取仪表盘上的指针位置,使得测量结果更加准确,具有一定的适用性和优越性。
结论:本文提出了一种基于Sobel算子边缘检测的仪表盘二值化阈值算法,能够有效地将仪表盘上的指针位置进行提取。
该算法具有较高的实用价值和适用范围,能够为仪表盘数字化提供有力的支持。
本文介绍了基于Sobel算子边缘检测的仪表盘二值化阈值算法,该算法能够有效地将仪表盘图像中的指针位置提取出来。
该算法首先将原始的彩色仪表盘图像转换为灰度图像,在灰度图像上使用Sobel算子进行边缘检测,生成了一个边缘信息图像。
然后,我们使用Otsu自适应阈值算法将边缘信息图像进行阈值化,以获得最终的二值化图像。
基于概率估计的Sobel算子医学图像边缘细化方法
Ke y wo r d s: me d i c a l i ma g e ;S o b e l o p e r a t o r ;p r o b a b i l i t y e s t i ma t i o n; e d g e e x t r a c t i o n;e d g e t h i n n i n g
Z e n g We n q u a n, He Y o n g j u n, Y u A i m i n, L i n Mi n
(1 . Gu a n g d o n g I n s t i t u t e o f S c i e n c e a n d T e c h n o l o g y, Gu a n g z h o u 5 1 0 6 4 0, C h i n a; 2 . S C ANME D( C HI N A) L t d . , Z h u h a i 51 9 0 8 0, C h i n a)
缘更有效。
关 键 词 :医 学 图 像 ; S o b e l算 子 ; 概 率估 计 ; 边缘 提 取 : 边 缘 细 化
中 图 分 类 号 :T P 3 9 1 文 献 标 识 码 :A 文 章 编 号 :1 6 7 4 — 7 7 2 0 ( 2 0 1 3) 1 3 — 0 0 4 9 — 0 4
t h e h i g h p o s i t i o n i n g a c c u r a c y , w h i c h c a n b e o b t a i n e d f ro m t h e p r o b a b i l i t y d i s t r i b u t i o n o f a me t h o d f or p o s i t i o n i n g v a l u a t i o n , i s g a i n e d .T h e e x p e r i me n t a l r e s u l t s s h o w t h a t t h e a l g o r i t h m i s mo r e e f f e c t i v e i n t h e e x t r a c t i o n o f me d i c a l C T i ma g e s t h a n t r a d i t i o n a l
对数域梯度与改进Sobel算子相结合的边缘检测
对数域梯度与改进Sobel算子相结合的边缘检测任克强;张镕【摘要】为了消除不均匀光照给图像边缘检测带来的影响,提出一种对数域梯度与改进Sobel算子相结合的边缘检测方法.该方法首先将图像变换到对数域,通过削弱低频入射分量增强高频反射分量,以提升图像亮度;然后合成改进的4方向Sobel算子,并用无穷范数表示梯度,以使需要被检测的图像更加完整;最后通过Bernsen算法得到的阈值与高斯滤波后得到的Bernsen算法阈值进行线性组合来确定最佳阈值,以使图像边缘更加连续完整.仿真实验结果表明,该方法可以有效消除不均匀光照对图像边缘检测的影响,与相关算法和文献相比,该方法对不同照度图像的边缘检测效果更好.【期刊名称】《液晶与显示》【年(卷),期】2019(034)003【总页数】8页(P283-290)【关键词】边缘检测;对数域梯度;改进Sobel算子;光照不均;Bernsen算法【作者】任克强;张镕【作者单位】江西理工大学信息工程学院,江西赣州 341000;江西理工大学信息工程学院,江西赣州 341000【正文语种】中文【中图分类】TP3911 引言边缘是模式识别中的重要的低层次特征信息,它是基于局部特征识别的重要依据。
边缘信息对光照非常敏感,尤其当物体表面被阴影遮挡或光照角度变化时,不容易检测到完整的边缘信息,会造成严重的识别错误。
因此解决好光照给边缘检测带来的问题,将会给社会生产、交通以及医学影像等领域带来重大意义[1-3]。
目前,常用的边缘检测算法有很多,传统的边缘检测算法包括Roberts算子、Canny算子以及Sobel算子等[4-6]。
随着数学理论及技术的不断发展,涌现了许多新的检测算法,如基于小波变换、数学形态学、神经网络以及自适应阈值选取的边缘检测算法等。
近年来,研究人员开始对光照问题的数字图像处理有了密切的关注[7-9],为解决光照不均的图像边缘检测问题提供了不少新的思路。
文献[10]针对文本图像在二值化时,光照不均导致文本图像OCR识别率降低的问题,提出采用改进Roberts算子和分块动态双阈值相结合来削弱光照不均的影响;该方法在处理复杂文本时效果也很显著,但是存在复杂度较高的不足。
基于改进Zernike矩的光斑图像亚像素边缘检测算法
第42卷第5期激光杂志 V o l.42,N o.5 2021 年5 月L A S E R J O U R N A L M ay,2021基于改进Z e r n ik e矩的光斑图像亚像素边缘检测算法刘悦,朱均超天津理工大学电气电子工程学院,光电器件与通信技术教育部工程研究中心,天津市复杂系统控制理论及应用重点实验室,天津300384摘要:为了满足光束质量检测中对光斑边缘高精度的定位要求,采用了 一种基于改进Zernilce矩的亚像 素边缘检测算法。
首先由S o b e l算子对光斑进行粗定位,再由Z e m ik e矩的边缘模型对获取的像素级边缘进行 重定位,最后根据改进的边缘判断条件,确定图像中的实际亚像素边缘点,以完成光斑图像亚像素级边缘的提 取。
通过对仿真图像亚像素边缘提取结果的分析,改进的Z e m ik e矩算法边缘检测最大误差为0.338个像素,最小误差为〇.〇88个像素,算法平均运行时间为319m s,相比于传统算法运行时间减少了 35.294%。
关键词:Zem ike矩;亚像素;边缘检测;光斑图像中图分类号:TN247 文献标识码:A doi:10.14016/j. cnki. jgzz. 2021. 03. 032Sub-pixel edge detection algorithm of spot image based onimproved Zernike momentLIU Y ue,Z H U JunchaoTianjin U niversity o f Technology, School o f Electrical a n d Electronic E ngineering y E n g ineering Research Center o fOptoelectronic Devices & C om m unication T echnology,M inistry o f E d u c a tio n,Tianjin K ey Laboratory fo r Control Theory a n d Applications in C om plicated S y s te m, T ia n jin, 300384, C hinaAbstract:To meet the requirements of high-precision spot edge location in beam quality detection, a sub-pixel edge detection algorithm based on improved Zemike moment is adopted in this paper. Firstly, the spot is roughly located by Sobel operator, and then the pixel level edge is relocated by the Zemike moment edge model. Finally, according to the improved edge judgment condition, the actual sub-pixel edge points in the image are determined to complete the spot im age's sub-pixel edge extraction. By analysing sub-pixel edge detection results of simulation image, the maximum error of improved Zemike moment algorithm is 0. 338 pixels, and the minimum error is 0. 088 pixels. The algorithm' s average running time is 319m s, which reduces 35. 294% compared with the traditional algorithm.Key words:Zernike moment;su b-p ixel;edge detection;spot imagei引言激光光束具有亮度高、稳定性好、方向性好等优 点,广泛应用于医疗、工业测量、通信及加工等领域~。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ed g e e x t r a c t i o n a l g o r i t h m o f i n f r a r e d t h e r ma l i ma g e b a s e d o n i m pr o v e d s o b e l o p e r a t o r
像的边缘 , 弥3 1 、 S o b e l 算子的不足及提高了 S o b e l 算子边缘检测的性能, 计算简单, 具有 良好 的 检 测精度 , 而且 得到 的边 缘较 细 , 极 大 的改善 了图像边 缘提 取 的效果 。
关键 词 : 图像处 理 ; 边缘检 测 ; 改进 的 S o b e l 算子 ; 热红 外 图像
Ab s t r a c t : T h e i n f r a r e d i ma g e o f t e n h a s t h e d r a w b a c k s o f f u z z y e d g e, t h e i ma g e d i v e r s i t y a n d d i ic f u l t y t o e x t r a c t t h e e d g e i n f o r ma t i o n . T o s o l v e t h e p r o b l e ms , a n e d g e e x t r a c t i o n a l g o it r h m b a s e d o n S o b e l o p e r a t o r g r a d i e n t mu l t i p l i c a t i o n i s p r o p o s e d . F i r s t l y , t h e h i g h t e mp e r a t u r e r e g i o n o f t h e t a r g e t t o b e i d e n t i i f e d i s e x t r a c t e d; s e c o n d l y, S o b e l o p e r a t o r a d d e d s i x o r i e n t a t i o n t e mp l a t e s a n d R o b e r t s o p e r a t o r a r e u s e d t o e x t r a c t i ma g e e d g e ;t h i r d l y, t wo g r a d i e n t ma g n i t u d e i ma g e s a r e mu l t i p l i e d ;f o u r t h l y, e d g e e x t r a c t e d i ma g e i s o b t a i n e d . MA T L AB i s u s e d t o s i mu l a t e t h e i ma g e . T h e s i mu l a t i o n r e — s u h s s h o w t h a t t h e a l g o r i t h m c a n r a p i d l y a n d e ic f i e n t l y e x t r a c t t h e e d g e o f i n f r a r e d t h e r ma l i ma g e, ma k e u p t h e d e t f — c i e n c i e s o f S o b e l o p e r a t o r a n d i mp r o v e t h e p e r f o r ma n c e o f S o b e l o p e r a t o r . T h e a l g o r i t h m h a s s i mp l e c a l c u l a t i o n, h J i g h p r e c i s i o n a n d s h a r p e d g e . I t i s e f f e c t i v e f o r i n f r a r e d i ma g e e d g e e x t r a c t i o n . Ke y wo r d s : i ma g e p r o c e s s i n g ; e d g e d e t e c t i o n; t h e i mp r o v e d S o b e l o p e r a t o r ; i n f r a r e d t h e r ma l i ma g e
第4 3卷 第 1 0期 2 0 1 3年 1 0月
激 光 与 红 外
LAS ER & I NFRARED
Vo 1 . 43, No .1 0 Oc t o be r , 2 01 3
文章编号: 1 0 0 1 — 5 0 7 8 ( 2 0 1 3 ) 1 0 — 1 1 5 8 - 0 4
・图像 与信 号处理 ・
基 于改 进 S o b e l 算 子 的红 外 图像 边缘 提取 算 法
夏 清 , 张振鑫 , 王婷 婷 , 王亚云 , 石 பைடு நூலகம்娟
( 1 . 中国矿业大学( 北京 )土地复垦与生态重建研究所 , 北京 1 0 0 0 8 3 ; 2 .中国矿业 大学( 北京 )地球科学与测绘工程学 院, 北京 1 0 0 0 8 3 )
X I A Q i n g 一 , Z HA N G Z h e n — x i n , WA N G T i n g . r i n g , WA N G Y a — y u n , S H I J u a n - j u a n
( 1 . C h i n a U n i v e r s i t y o f M i i n n g a n d T e c h n o l o g y ( B e i j i n g ) , I n s t i t u t e o f l a n d R e c l a m a t i o n nd a E c o l o g i c a l R e c o st n r u c i t o n , B e i j i n g 1 ( 1 1 3 8 3 , C h i n a ; 2 C in h a U i n v e s r i t y o f Mi i n n g nd a T e c no h l o g y ( B e i j i n g ) , C o l l e g e o f G e o s c i e n c e a n d S u r v e y i n g E n g i n e e r i n g , B e i j i n g 1 0 0 0 8 3 , C i h n a )
摘 要 : 针 对 红外热 像仪 采集 的 图像 边缘 信息模 糊 , 图像 显 示多样 性 , 边缘 信 息难提取 的特 点 , 提 出了一种基 于 S o b e l 算子梯 度 相乘 的边缘 提取 算 法。该 算 法首 先对 红 外 热像 仪 图像进 行 待 识别 目标 的高温 区域 提取 , 然 后分别 利用 增加 了 6个 方 向模板 的 S o b e l 算子 和 R o b e a s算子 对 图像 进行 边 缘提取 , 再将 得到 的两幅梯度 幅值 图像进 行 梯度相 乘 , 最终得 到边 缘提取 图像 。最 后, 用 MA T L A B对 图像 进行 了仿 真 , 仿 真结 果表 明 , 该 算法 能够 快速 有 效地提 取 红 外热像 仪 图