材料力学梁弯曲时的位移
材料力学位移公式
材料力学位移公式材料力学中的位移公式,那可是个相当有趣且重要的家伙!咱先来说说啥是位移。
想象一下,你有一根长长的木棍,你给它施加了各种力,然后这根木棍的位置发生了变化,这个变化量就是位移啦。
在材料力学里,位移公式就像是一把神奇的钥匙,能帮我们解开很多结构变形的谜题。
比如说,梁的弯曲变形,柱的压缩伸长等等。
就拿梁来说吧,梁在受到外力作用时,会产生弯曲。
这时候我们就要用到位移公式来计算它的变形量。
这里面有个很关键的概念,叫挠度。
挠度就是梁在弯曲时,某个点沿着垂直方向的位移。
咱们来具体讲讲位移公式是咋来的。
这可不是一拍脑袋就想出来的,而是经过了无数科学家们的努力和研究。
他们通过做实验、观察、分析数据,一点点地总结归纳出来的。
我记得有一次,在给学生们讲解这个知识点的时候,有个特别调皮的小家伙,他眨巴着大眼睛问我:“老师,这公式有啥用啊,我们为啥要学它?”我笑了笑,然后拿起教室里的一把塑料直尺,把一端固定在桌子上,另一端用手往下压。
我问同学们:“你们看,这直尺发生了啥变化?”大家都七嘴八舌地说尺子弯了。
我接着说:“那如果这尺子是一座桥,我们得知道它能承受多大的压力,变形多少才不会出危险,这时候位移公式就派上用场啦!”再说个实际的例子,像我们生活中的大楼,那可都是用各种材料搭建起来的。
如果工程师们不懂得位移公式,不了解材料在受力时的变形情况,那这大楼盖起来可能就歪歪扭扭,甚至还会有倒塌的危险。
在学习位移公式的时候,可别死记硬背哦。
得理解它背后的物理意义,搞清楚每个变量代表的是什么。
比如说,公式里的力的大小、作用点、材料的弹性模量等等,这些都会影响位移的大小。
而且,位移公式不仅仅是在理论上重要,在实际工程中那更是用处多多。
比如设计桥梁的时候,要根据车流量、载重等计算桥梁的位移,确保桥梁在使用过程中的安全和稳定;在制造机械零件的时候,也要考虑零件在工作时的位移,保证零件的精度和可靠性。
总之,材料力学位移公式虽然看起来有点复杂,但只要我们用心去学,去理解,就能发现它的魅力所在,它能帮助我们解决很多实际问题,让我们的生活变得更加安全和美好。
工程力学---材料力学第七章-梁弯曲时位移计算与刚度设计经典例题及详解

P
B C
l 2 l 2
A
x
P 解:AC段:M ( x ) x 2 y P EIy x 2 A P 2 EIy x C x 4 l 2 P 3 EIy x Cx D 12
P
B C
l 2
x
由边界条件: x 0时,y 0
l 由对称条件: x 时,y 0 2
梁的转角方程和挠曲线方程分别为:
最大转角和最大挠度分别为:
11qa max A 1 x1 0 6 EI 19qa 4 ymax y2 x2 2 a 8EI
3
例5:图示变截面梁悬臂梁,试用积分法
求A端的挠度 P
I
2I
l
fA 解: AC段 0 x l
B
P 3 2 EIy x C2 x D2 6
由边界条件: x l时,y=0, =0
得:
C2
1 1 Pl 2 , D2 Pl 3 2 3
l x 时,yC左 =yC右 , C左 = C右 由连续条件: 2
5 3 2 C1 Pl , D1 Pl 3 16 16
由连续条件: x1 x2 a时, y1 y2 , y1 y2
由边界条件: x1 0时, y1 0
0 x 2 a 时 , y 由对称条件: 2 2
得 D1 0
C1 C2 得 D1 D2
11 3 得 C2 qa 6
qa 1 (11a 2 3 x12 ) 0 x1 a 6 EI q 2 [3ax2 2 ( x2 a)3 11a 3 a x2 2a 6 EI qa y1 (11a 2 x1 x13 ) 0 x1 a 6 EI q y2 [4ax23 ( x2 a) 4 44a 3 x2 ] a x2 2a 24 EI
孙训方《材料力学》(第6版)笔记和课后习题(含考研真题)详解-梁弯曲时的位移(圣才出品)
圣才电子书
ql3/6,D=-ql4/24。
十万种考研考证电子书、题库视频学习平台
故挠曲线方程和转角方程分别为:
w(x)=qx2(x2+6l2-4lx)/(24EI),θ(x)=q(x3-3lx2+3l2x)/(6EI)
则最大挠度 wmax=w(x)|x=l=ql4/(8EI);梁端转角 θB=θ(x)| x=l=ql3/(6EI)。
表 5-1-4 叠加原理计算梁的挠度和转角
四、梁的刚度校核·提高梁的刚度的措施(见表 5-1-5)
表 5-1-5 梁的刚度校核及提高措施
3 / 41
圣才电子书 十万种考研考证电子书、题库视频学习平台
五、梁内的弯曲应变能 定义:由于梁弯曲变形而存储的能量称为梁内的弯曲应变能。梁在弹性变形过程中,其 弯曲应变能与作用在梁上的外力所作的功相等,常见梁内的弯曲应变能见表 5-1-6。
则最大挠度 wmax=w(x)|x=l=Fl3/3EI;梁端转角 θB=θ(x)| x=l=Fl2/2EI。
图 5-2-1(a)(b) (2)建立如图 5-2-1(b)所示坐标系。 首先列弯矩方程:M(x)=-q(l-x)2/2,由此可得挠曲线近似方程: EIw″=-M(x)=q(l-x)2/2 积分得: EIw′=-q(l-x)3/6+C① EIw=q(l-x)4/24+Cx+D② 该梁的边界条件:x=0,w=0,x=0,w'=0。代入式①、②可确定积分常数:C=
圣才电子书
十万种考研考证电子书、题库视频学习平台
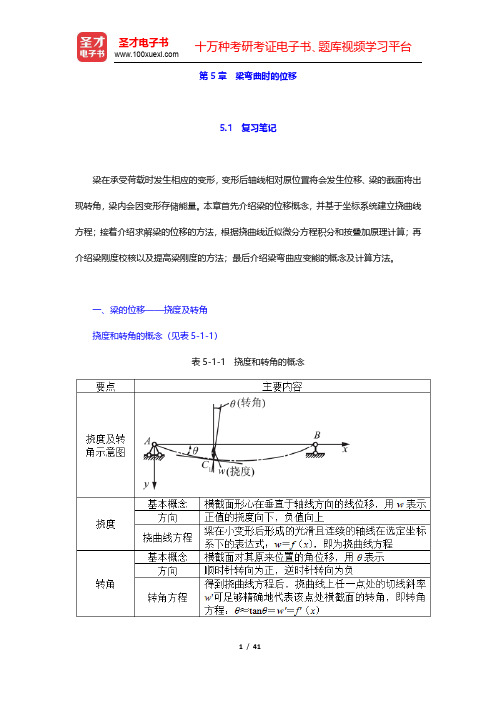
第 5 章 梁弯曲时的位移
5.1 复习笔记
梁在承受荷载时发生相应的变形,变形后轴线相对原位置将会发生位移、梁的截面将出 现转角,梁内会因变形存储能量。本章首先介绍梁的位移概念,并基于坐标系统建立挠曲线 方程;接着介绍求解梁的位移的方法,根据挠曲线近似微分方程积分和按叠加原理计算;再 介绍梁刚度校核以及提高梁刚度的方法;最后介绍梁弯曲应变能的概念及计算方法。
材料力学第五章梁弯曲时的位移
实例3 :均布载荷
分析受均布载荷作用下梁的位移。
材料力学第五章梁弯曲时 的位移
在材料力学的第五章中,我们将学习有关梁在弯曲时的位移。掌握梁的基本 知识、位移方程和位移计算方法,以及梁的挠度与转角关系。
梁的基本知识
1 定义
梁是一种长条形结构,承受着沿其长度方向的外部力。
2 类型
常见的梁包括简支梁、悬臂梁和受力梁。
3 材料
梁可以由不同类型的材料制成,例如钢、木材或混凝土。
梁的位移方程
1 弯曲位移
2 挠度
3 转角
梁在弯曲时,沿梁的长度方 向发生位移。
挠度是梁的中点相对于其自 由状态的偏移量。
转角是指梁在弯曲时端部角 度的变化。
简支梁的位移计算方法
1
载荷和反力
计算简支梁上的载荷和反力分布。
2
弯矩方程
使用弯矩方程推导出简支梁的位移方程。
3
边界条件
应用适当的边界条件来解决位移方程中的未知量。
悬臂梁的位移计算方法
加载和支座反力
确定悬臂梁上的加载和支座反力。
弯曲力矩方程
通过推导弯曲力矩方程来解决悬臂 梁的位移问题。
解决边界条件
应用边界条件来计算悬臂梁的位移。
受力梁的位移计算方法
1
截面转动方程
2
推导出受力梁的截面转动方程。
3
确定力的分布
分析受力梁上的力分布,包括集中力和均布 力。
边界条件和位移方程
应用边界条件,求解受力梁的位移方程。ຫໍສະໝຸດ 梁的挠度与转角关系挠度
挠度是梁在弯曲时沿其长度方向上的位移。
转角
转角是梁在弯曲时端部偏离初始位置的角度。
关系公式
挠度和转角之间存在一定的关系,可以通过公式计算。
梁位移计算公式

梁位移计算公式梁的位移计算公式基于梁的受力平衡和材料力学的基本原理。
在这里,我们将讨论一维梁的位移计算方法,即假设梁只在一个平面内受力,并且假设梁的截面尺寸和材料性质均为均匀的。
我们需要确定梁的边界条件。
常见的边界条件有两种:固定边界条件和自由边界条件。
在固定边界条件下,梁的两端被固定,不允许有任何位移和旋转;而在自由边界条件下,梁的两端可以自由位移。
接下来,我们需要确定梁的受力情况。
通常,梁在两端受到外部荷载作用,这些荷载可以是集中力、均布力或者集中力和均布力的组合。
此外,梁还可能受到自重的影响。
在计算位移时,我们需要将这些荷载转化为梁上的内力分布。
针对不同的受力情况,我们可以使用不同的位移计算方法。
在本文中,我们将重点介绍三种常见的位移计算方法:拉梁法、剪梁法和挠梁法。
拉梁法是一种基于受力平衡的位移计算方法。
它假设梁的变形是由拉伸和压缩引起的,而不考虑剪切变形。
根据拉梁法,我们可以通过梁上任意一点的变形位移和受力来计算梁的位移。
剪梁法是一种基于受力平衡和材料切变变形的位移计算方法。
它假设梁的变形是由剪切引起的,并考虑了横截面的形状和材料的性质。
根据剪梁法,我们可以通过梁上任意一点的切变位移和受力来计算梁的位移。
挠梁法是一种基于弯曲变形的位移计算方法。
它假设梁的变形是由弯曲引起的,并考虑了横截面的形状和材料的性质。
根据挠梁法,我们可以通过梁上任意一点的弯曲位移和受力来计算梁的位移。
在实际应用中,我们可以将以上三种方法结合起来,综合考虑拉伸、压缩、剪切和弯曲等因素,来计算梁的位移。
此外,我们还可以使用计算机辅助工具,如有限元分析软件,来进行更精确和复杂的梁位移计算。
需要注意的是,梁的位移计算是一个复杂的过程,需要综合考虑各种因素和假设。
在实际工程中,我们应该根据具体情况选择适当的位移计算方法,并进行合理的假设和简化,以确保计算结果的准确性和可靠性。
通过以上的讨论,我们可以看到,梁的位移计算是一个重要且复杂的问题。
关于梁的弯曲中若干公式的分类讨论①

关于梁的弯曲中若干公式的分类讨论①梁的弯曲是指受力作用下梁的截面发生了形变,弯曲应力和弯曲变形会对梁的使用性能产生影响。
因此,研究梁的弯曲是很重要的。
在梁的弯曲研究中,涉及到若干公式,我们可以对这些公式进行分类讨论。
一、力学公式力学公式是描述梁的弯曲情况时经常用到的公式,包括以下几个方面:1. 矩形截面梁的抗弯极限状态当梁受到弯曲力矩时,梁截面内部产生由受力引起的应力,如果应力超过了材料所能承受的极限值,则梁就会发生断裂。
矩形截面梁的抗弯极限状态公式是:M=1.5×f_y×Z_x,其中M代表弯曲力矩,f_y代表截面所使用的钢材的抗拉强度,Z_x代表梁截面的抗弯截面模量。
2. 矩形薄壁截面梁的端部弯曲应力当梁受到弯曲力作用时,端部的弯曲应力有时比较集中,这种情况在矩形薄壁截面梁中比较常见。
矩形薄壁截面梁的端部弯曲应力公式是:σ_max=Mc/I,其中σ_max代表端部的最大弯曲应力,M代表弯曲力矩,c代表截面厚度,I代表截面惯性矩。
3. 梁内应力分布公式如果梁内部应力分布不均匀,就会导致梁的强度变化,因此要研究梁内应力分布。
梁内应力分布公式是:σ=My/I+zQ_x,其中σ代表应力,M代表弯曲力矩,y代表截面中心到离截面上缘距离,I代表截面惯性矩,z代表离截面上缘距离,Q_x代表梁截面的剪力。
1. 梁位移公式梁的位移指梁在弯曲时最大的偏移距离,梁位移公式是:δ=5WL^4/384EI,其中δ代表梁的最大位移,W代表梁的承载能力,L代表梁的长度,E代表梁材料的弹性模量,I代表截面对弯曲的惯性矩。
2. 切线旋转公式切线旋转公式用来描述梁在弯曲中切线和轨迹的关系,切线旋转公式是:Ψ=ML/2IEI,其中Ψ代表角度,M代表弯曲力矩,L代表梁的长度,I代表截面对弯曲的惯性矩,EI代表弹性模量与截面惯性矩的乘积。
材料力学公式用来描述材料在弯曲状态下的性质变化,涉及以下几个方面:1. 摆动强度公式摆动强度公式是表示材料在弯曲状态下疲劳寿命的公式,摆动强度公式是:S_a=1/2×S_e×(1+R)^1/2,其中S_a代表摆动强度,S_e代表材料的疲劳强度,R代表应力的比值(最小应力/最大应力)。
材料力学第五章梁弯曲时的位移

工程实例
7-1
工程实例
工程实例
5-1 梁的位移——挠度及转角
建立坐标系,oxy为梁对称面,外力作用在对 称面内。所以,挠曲线为o xy面内的平面曲线。
挠度
y 向下为正。
y
x
y
转角
x
挠曲线
挠曲线方程:
7-2
w= f (x)
挠度
略去剪力的影响,则平面假设成立,发
y
5.2 积分法求梁的挠度和转角
例1 求梁的转角方程和挠度方程,并求最大转角和最大挠度, 梁的EI已知。
解 1)由梁的整体平衡分析可得:
2)写出x截面的弯矩方程
FAx 0, FAy F (), M A Fl (
)
A
x
l
yB
F B
B
x
M ( x ) F (l x ) F ( x l )
A
FAx 0, FAy
Fb Fa , FBy l l
2)弯矩方程
FAy x1
ymax
x2
FBy
AC 段:
M x1 FAy x1 Fb x1 ,0 x1 a l
y
a
b
CB 段:
Fb M x2 FAy x2 F ( x2 a ) x2 F ( x2 a ), l
目录
a x2 l
5.2 积分法求梁的挠度和转角
A d 2 w1 Fb EI M ( x1 ) x1 2 dx1 l FAy x1 dw1 Fb 2 EI EI ( x1 ) x1 C1 x2 dx1 2l Fb 3 a EIw1 x C1 x1 D1 6l a x2 l CB 段: y d 2 w2 Fb EI M ( x2 ) x2 F ( x2 a) 2 dx2 l dw Fb 2 F EI 2 EI ( x2 ) x 2 ( x2 a ) 2 C 2 dx2 2l 2 Fb 3 F EIw2 x 2 ( x2 a)3 C2 x2 D2 6l 6
材料力学 第6章 梁的弯曲变形

(c)
材料力学
第2章第剪6章切与梁连的接弯件曲的变实形用计算
在本章所取的坐标系中,
上凸的曲线w″为正值,下凸的为负值。
如图6-5所示。 按弯矩正负号的规定,正弯矩对应着负的w″, 负弯矩对应着正的w″,故(c)式
w
M (x)
(1
w2 )3 2
EI z
在小变形情况下, w dw 是一个很小的量, dx
则 w'2为高阶微量,可略去不计,故
挠曲线的近似微分方程
M x
w EI z
EIw''= −M (x)
(6-1b)
图6-5
材料力学
第2章第剪6章切与梁连的接弯件曲的变实形用计算
6.4 积分法计算梁的变形
对于等直梁,可以直接积分,计算梁的挠度和转角。 将式(6-1b)积分一次,得到
EIw′ = EIθ = −∫ M (x) dx + C
maxFl 2 2EI来自A xyF
θmax B
x
wmax
l
图6-7 例题 6-1 图
wm a x
Fl 3 3EI
θ max为正值,表明梁变形后,截面B顺时针转动;
wmax为正值,表明点B位移向下。
材料力学
第2章第剪6章切与梁连的接弯件曲的变实形用计算
例题6-2 一简支梁受均布荷载q作用,如图6-8所示。试求梁的转角方程和 挠度方程, 并确定最大挠度和A、B截面的转角。设梁的弯曲刚度为EI。
A x
y
F
θmax B
x
wmax
l
进行两次积分,得到
EIw EI Flx Flx2 C
(a)
2
EIw Flx2 Fx3 Cx D
材料力学 积分法求梁的变形
M ( x ) = r EI Z 1
1 = ± r d 2 w dx 2 d w é 2 ù 1 + ( ) ê ú dx ë û
3
±
d 2 w dx 2 d w 2 ù é 1 + ( ) ú ê dx û ë
3
M ( x ) = EI Z
边界条件、连续条件应用举例
弯矩图分三段,共6 个积分常数需6个边界条 件和连续条件 A B
P C D
w
铰连接
ω A点: A = 0, q A = 0
B 点 : w B 左 = w B 右
C点 : w C左 = w C右
D点:w D = 0
q C 左 = q C 右
边界条件、连续条件应用举例
y
边界条件
3 qL C1 = 6 EI z
EI zw =
1 (L - x )4 + C q 1 x + C 2 24
x = 0 x = 0 x = L
q = 0 w = 0
qL3 q B = 6 EI z
q =-
3 qL C2 =24 EI z
挠曲线方程应分两段AB,BC.
F A
a
q
B
EI z
L
共有四个积分常数
C
x
边界条件
x = a x = a + L
连续条件
w B = 0 wC = 0
y
x = a
w B1 = w B 2 q B1 = q B 2
例题 5.4 &
用积分法求图示各梁挠曲线方程时,试问下列各梁 的挠曲线近似微分方程应分几段;将分别出现几个积 分常数,并写出其确定积分常数的边界条件
梁的最大位移计算公式
梁的最大位移计算公式梁的最大位移计算公式是用于计算梁在受力作用下发生的弯曲位移的公式。
梁是指在两个支点之间受力作用的一种结构。
梁的最大位移是指梁在受力作用下最大弯曲的位移值。
梁的位移计算涉及到材料力学和结构力学的知识,其中梁的形状、材料特性、受力情况等都会对最大位移的计算产生影响。
在计算梁的最大位移时,一般可以使用梁的弯曲理论来进行计算。
梁的弯曲理论可以通过假设梁是一根弯曲曲线的理论来进行推导。
根据弯曲理论,可以得到梁的最大位移计算公式。
δmax = (5 * Pl^4) / (384 * E * I)其中,δmax表示梁的最大位移;P表示梁上的受力值;l表示梁的长度;E表示梁所采用的材料的弹性模量;I表示梁的截面惯性矩。
这个公式是根据梁的弯曲理论推导得到的,可以用于计算梁在受力作用下的最大位移。
在使用这个公式进行计算时,需要知道梁的受力情况、几何形状和材料特性。
其中,受力情况包括梁上所受到的力和力的位置;几何形状包括梁的长度和截面形状;材料特性包括梁所采用的材料的弹性模量和截面惯性矩。
需要注意的是,这个公式是基于一些简化假设和梁的边界条件推导得到的,只适用于一些特定的情况。
在实际应用中,可能需要考虑更多的因素,如梁的支点、梁的侧向刚度、梁的动态响应等。
因此,在具体应用中需要根据实际情况,结合可能的简化假设和合适的分析方法进行位移计算。
总之,梁的最大位移计算公式用于计算梁在受力作用下的最大弯曲位移,其中涉及到梁的几何形状、受力情况和所采用的材料特性。
使用这个公式进行计算时,需要根据实际情况进行合理的简化和假设,并结合适当的分析方法来进行计算。
梁的位移计算公式

梁的位移计算公式梁在工程结构中可是个常见的角色,咱今天就来聊聊梁的位移计算公式。
先来说说啥是梁的位移。
简单讲,就是梁在受力作用下位置发生的变化。
这就好比你用一根竹竿挑东西,竹竿会弯曲变形,这个变形的程度就是位移啦。
那梁的位移计算公式到底是啥呢?一般来说,我们常用的公式是基于材料力学的知识推导出来的。
比如说,对于简支梁在集中荷载作用下的位移计算公式,就包含了梁的长度、荷载大小、材料的弹性模量以及梁的截面惯性矩等因素。
给您举个例子吧。
有一次我去一个建筑工地,看到工人们正在搭建一个钢结构的厂房。
其中有一根大梁,承受着上面传来的各种荷载。
工程师们就在那拿着图纸和计算器,算着这根梁的位移。
我凑过去看了看,他们密密麻麻写了一堆公式和数字,那认真的劲儿,就好像在破解一个超级难题。
咱再深入点说,梁的位移计算可不是个简单事儿。
它得考虑好多因素,像梁的材料特性、受力情况、边界条件等等。
比如说,如果梁是用钢材做的,和用木材做的,那计算可就不太一样啦。
钢材的弹性模量一般比木材大,所以相同情况下,钢梁的位移可能就会小一些。
还有哦,梁的截面形状也会影响位移计算。
如果是个矩形截面的梁,和一个圆形截面的梁,它们的惯性矩就不同,算出来的位移也有差别。
这就好像同样是一根棍子,粗的和细的,承受力的能力肯定不一样。
在实际工程中,梁的位移计算可太重要了。
要是算错了,那后果不堪设想。
比如说,如果位移过大,可能会导致梁的结构不稳定,甚至出现裂缝、垮塌的危险。
所以啊,咱们搞工程的人,在计算梁的位移时,那可得小心谨慎,每个参数都要搞准确,每个公式都要运用得当。
这就像是一场精细的手术,容不得半点马虎。
总之,梁的位移计算公式虽然复杂,但只要我们掌握了其中的原理和方法,结合实际情况认真计算,就能确保梁的结构安全可靠。
这不仅是对工程质量的保障,也是对人们生命财产的负责。
希望大家在今后遇到梁的位移计算问题时,都能胸有成竹,算出准确的结果!。
材料力学(土木类)第五章 梁弯曲时的位移(2)
3 3 3
利用叠加原理求图示弯曲刚度为EI的悬臂梁 例5-6 利用叠加原理求图示弯曲刚度为 的悬臂梁 自由端B截面的挠度和转角 截面的挠度和转角。 自由端 截面的挠度和转角。
F A l C EI l F D l B
原荷载可看成为图a和 两种荷载的叠加 两种荷载的叠加, 解:原荷载可看成为图 和 b两种荷载的叠加,对应 的变形和相关量如图所示。 的变形和相关量如图所示。
Fl θ C1 = 2 EI
2
3
由位移关系可得此时B截面的挠度和转角为: 由位移关系可得此时 截面的挠度和转角为: 截面的挠度和转角为
Fl 3 Fl 2 4 Fl 3 wB1 = wC1 + θ C1 ⋅ BC = + × 2l = 向下) (向下) 3EI 2 EI 3EI Fl θ B1 = θ C1 = 2 EI
q ( x) x 2 dθ B = dθ ( x) = dx 2 EI
范围对q(x)dx的作用进行叠加,相当于 的作用进行叠加, 在x=0, l范围对 范围对 的作用进行叠加 对上两式在前述范围内积分, 对上两式在前述范围内积分,即:
wB = ∫ d wB = ∫
0
l
l
0
11q 0 l q ( x ) x (3l − x ) dx = 6 EI 120 EI
上次课回顾: 上次课回顾:
1、度量梁变形的两个基本位移量:挠度和转角 度量梁变形的两个基本位移量: 2、挠曲线近似微分方程
EIw′′ = − M ( x )
3、挠曲线近似微分方程的积分 、
EIw ' ( x ) = ∫ ( − M ( x )) dx + C1
EIw ( x ) =
材料力学第五章 梁的变形

连续条件
xa
wB1 wB2
例题 画出挠曲线大致形状。图中C为中间铰。
解: 边界条件
A
C
F
B
wA 0 qA 0
wB 0
两根梁由中间铰连接,挠
曲线在中间铰处,挠度连
续,但转角不连续。
wC左 wC右
qC左 qC右
A
挠曲线的凸向由弯矩的正
负号决定,正弯矩向下凸,
负弯矩向上凸。
例 图示等截面梁,弯曲刚度EI。设梁下有一曲面 y Ax3 ,欲
)
6l
bF l
F
b
C
Bx
x l
aF FRB l
AC段 (0 x a)
EIw1
bF l
x
EIw1
bF 2l
x2
C1
EIw1
bF 6l
x3
C1 x
D1
CB段 (a x l)
EIw2
bF l
x
F(x a)
EIw2
bF 2l
x2
F ( x a)2 2
C2
EIw2
bF 6l
x3
F ( x a)3 6
转角方程,挠度方程
EIw M ( x)
q w m 6lx 3x2 2l 2 6EIl A
m
l
C
w mx 3lx x2 2l 2 6EIl
2 m
y FRA l
l
x B
m FRB l
求 wmax w q 0
3 x0 1 3 l 0.423l
wmax
w
x0
F2 60kN
C
A
F1 200kN
F2
D
材料力学第五章梁弯曲时的位移分析
a)2
C2 x2 D2
C2
B B x
FBy
目录
5.2 积分法求梁的挠度和转角
4)由边界条件确定积分常数
位移边界条件
x1 0, w1(0) 0 x2 l, w2 (l) 0
光滑连续条件
x1 x2 a, 1(a) 2 (a)
x1 x2 a, w1(a) y2 (a) 代入求解,得
x1 ,0
x1
a
y
CB 段:
M x2
FAy
x2
F ( x2
a)
Fb l
x2
F ( x2
a),
a x2 l
目录
5.2 积分法求梁的挠度和转角
3)列挠曲线近似微分方程并积分
F
AC 段: 0 x1 a
EI
d 2w1 dx12
M (x1)
Fb l
x1
EI
dw1 dx1
EI (x1)
Fb 2l
x2 1
EI dw EI 1 F (l x)2 C
dx
2
EIw 1 F (l x)3 Cx D 6
代入求解
C 1 Fl2, D 1 Fl3
2
6
5)确定转角方程和挠度方程
EI 1 F (l x)2 1 Fl2
2
2
Ax
y
yB
l
F Bx
B
EIw 1 F (l x)3 1 Fl2x 1 Fl3
目录
5.2 积分法求梁的挠度和转角
例2 求梁的转角方程和挠度方程,并求最大转角和最大挠度,
梁的EI已知,l=a+b,a>b。
F
解 1)由梁整体平衡分析得:
材料力学笔记(第五章)
材料力学(土)笔记第五章 梁弯曲时的位移1.梁的位移——挠度及转角为研究等直梁在对称弯曲时的位移取梁在变形前的轴线为x 轴,梁横截面的铅垂对称轴为y 轴而xy 平面即为梁上荷载作用的纵向对称平面梁发生对称弯曲变形后,其轴线将变成在xy 平面内的曲线1AC B度量梁变形后横截面位移的两个基本量是挠度:横截面形心(即轴线上的点)在垂直于x 轴方向的线位移ω转角:横截面对其原来位置的角位移θ 梁变形后的轴线是一条光滑的连续曲线,且横截面仍与该曲线保持垂直因此横截面的转角θ也就是曲线在该点处的切线与x 轴之间的夹角度量等直梁弯曲变形程度的是曲线的曲率梁的变形还受到支座约束的影响通常就用这两个位移量来反映梁的变形情况梁轴线弯曲成曲线后,在x 轴方向也将发生线位移 但在小变形情况下,梁的挠度远小于跨长,梁变形后的轴线是一条平坦的曲线横截面形心沿x 轴方向的线位移与挠度相比属于高阶微量,可略去不记因此在选定坐标后,梁变形后的轴线可表达为()f x ω=式中,x 为梁在变形前轴线上任一点的横坐标;ω为该点的挠度梁变形后的轴线称为挠曲线,在线弹性范围内,也称为弹性曲线上述表达式则称为挠曲线(或弹性曲线)方程由于挠曲线为一平坦曲线,故转角θ可表达为''tan ()f x θθω≈== 称为转角方程即挠曲线上任一点处的切线斜率'ω可足够精确地代表该点处横截面的转角θ 由此可见,求得挠曲线方程后,就能确定梁任一横截面挠度的大小,指向及转角的数值 正值的挠度向下,负值的挠度向上正值的转角为逆时针转向,负值的转角为顺时针方向2.梁的挠曲线近似微分方程及其积分为求得梁的挠曲线方程,利用曲率κ与弯矩M 间的物理关系,即 1M EIκρ== 式中曲率κ为度量挠曲线弯曲程度的量,是非负的这是梁在线弹性范围内纯弯曲情况下的曲率表达式在横力弯曲时,梁横截面上除弯矩M 外尚有剪力S F 但工程用梁,其跨长l 一般均大于横截面高度的10倍剪力S F 对于梁位移的影响很小,可略去不计,故该式子依然适用式中的M 和ρ均为x 的函数,即1()()()M x x x EIκρ== 在数学中,平面曲线的曲率与曲线方程导数间的关系有'''23/21()(1)x ωρω=±+ 取x 轴向右为正,y 轴向下为正时曲线凸向上时''ω为正,凸向下时为负而按弯矩的正、负号规定,梁弯曲后凸向下时为正,凸向上为负,符号相反于是得到 '''23/2()(1)M x EIωω=-+ 由于梁的挠曲线为一平坦曲线,因此,'2ω与1相比十分微小可以略去不计故上式可近似的写为 ''()M x EIω=-上式略去了剪力S F 的影响,并略去了'2ω项 故称为梁的挠曲线近似微分方程若为等截面直梁,其弯曲刚度EI 为一常量,上式可改写为''()EI M x ω=-对于等直梁,上式进行积分,并通过由梁的变形相容条件给出的边界条件确定积分常数 即可求得梁的挠曲线方程当全梁各横截面上的弯矩可用单一的弯矩方程表示时,梁的挠曲线近似微分方程仅有一个 将上式的两端各乘以dx ,经积分一次,得'1()EI M x dx C ω=-+⎰再积分一次,即得12[()]EI M x dx dx C x C ω=-++⎰两式子中积分常数1C 、2C 可通过挠曲线的边界条件确定例如在简支梁中,左右铰支座处的挠度均等于零在悬臂梁中,固定端处的挠度和转角均等于零确定积分常数1C 、2C 后,就分别得到梁的转角方程和挠曲线方程从而可以确定任一横截面的转角和挠度1C 和2C 的几何意义 由于以x 为自变量,在坐标原点即0x =处的定积分恒等于零因此,积分常数'100x C EI EI ωθ===,20C EI ω=式中,0θ和0ω分别表示坐标原点处截面的转角和挠度若梁上的荷载不连续即分布荷载在跨度中间的某点处开始或结束,以及集中荷载或集中力偶作用处梁的弯矩需分段写出,各段梁的挠曲线近似微分方程也随之不同在对各段梁的近似微分方程积分时,均将出现两个积分常数为确定这些积分常数,除需利用支座处的约束条件外还需利用相邻两段梁在交界处位移的连续条件例如左、右两段梁在交界处的截面应具有相等的挠度和转角不论是约束条件和连续条件,均发生在各段挠曲线的边界处故均成为边界条件,即弯曲位移中的变形相容条件遵循两个原则①对各段梁,都是从同一坐标原点到截面之间的梁段上的外力列出弯矩方程所以后一段梁的弯矩方程包括前一段的弯矩方程的新增的()x a -项②对()x a -项的积分,以()x a -作为自变量于是由x a =处的连续条件,就能得到两段梁上相应的积分常数分别相等的结果 对于弯矩方程需分为任意几段的情况,只要遵循上述规则同样可以得到各梁段上相应的积分常数分别相等的结果从而简化确定积分常数的运算3.按叠加原理计算梁的挠度和转角梁在微小变形条件下,其弯矩与荷载成线性关系 在线弹性范围内,挠曲线的曲率与弯矩成正比当挠度很小时,曲率与挠度间呈线性关系梁的挠度和转角均与作用在梁上的荷载成线性关系在这种情况下梁在几项荷载(如集中力、集中力偶或分布力)同时作用下某一横截面的挠度或转角 就分别等于每项荷载单独作用下该截面的挠度或转角的叠加,即为叠加原理 已知梁在每项荷载单独作用下的挠度和转角表则按叠加原理来计算梁的最大挠度和最大转角将较为方便4.奇异函数·梁挠曲线的初参数方程5.梁的刚度校核·提高梁的刚度的措施5.1 梁的刚度校核对于梁的挠度,其许可值通常用许可挠度与跨长之比值[]l ω作为标准 梁的刚度条件可表达为 max[]ll ωω≤ max []θθ≤ 一般土建工程中的构件,强度要求是主要的刚度要求一般处于从属地位但当对构件的位移限制很严,或按强度条件所选用的构件截面过于单薄时刚度条件也可能起控制作用5.2 提高梁的刚度的措施由梁的位移表可见梁的位移(挠度和转角)除了与梁的支承和荷载情况有关还与其弯曲刚度EI 成反比,与跨长l 的n 次幂成正比减小梁的位移,可采取下列措施①增大梁的弯曲刚度EI②调整跨长和改变结构5.梁内的弯曲应变能当梁弯曲时,梁内将积蓄应变能梁在线弹性变形过程中弯曲应变能V ε在数值上等于作用在梁上的外力所作的功W梁在纯弯曲时各横截面上的弯矩M 为常数,并等于外力偶矩e M当梁处于线弹性范围内e EI EI θρ=== θ与e M 呈线性关系直线下的三角形面积就代表外力偶所作的功W ,即12e W M θ=从而得纯弯曲时梁的弯曲应变能 12e V M εθ=即得2222e M l M l V EI EIε== 横力弯曲时,梁内应变能包含两个部分:与弯曲变形相应的弯曲应变能和与切应变形相应的剪切应变能对于弯曲应变能,取长为dx 的梁段,其相邻两横截面的弯矩应分别为()M x 和()()M x dM x +在计算微段的应变能时,弯矩的增量为一阶无穷小,可略去不计 计算器弯曲应变能为2()2M x dV dx EIε= 全梁的弯曲应变能则可通过积分求得为2()2l M x V dx EIε=⎰ 式中,()M x 为梁任一横截面上的弯矩表达式 当各段梁的弯矩表达式不同时,积分需分段进行梁的剪切应变能远小于弯曲应变能,可略去不计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 梁弯曲时的位移
弯曲后梁的轴线——挠曲线(deflection curve)为一平 坦而光滑的曲线,它可以表达为w=f(x),此式称为挠曲线 方程。由于梁变形后的横截面仍与挠曲线保持垂直,故
横截面的转角q 也就是挠曲线在该相应点的切线与x轴之
间的夹角,从而有转角方程:
q tanq w f x
解:该梁的弯矩方程为
M x ql x 1 qx2 q lx x2
22
2
挠曲线近似微分方程为
EIw M x q lx x2 2
以x为自变量进行积分得:
EIw
q 2
lx2 2
x3 3
C1
EIw
q 2
lx3 6
x4 12
C1x
C2
22
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
根据该梁边界条件和全梁横截面上弯矩均为负值, 以及挠曲线应光滑连续描出了挠曲线的示意图。
16
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
可见该梁的qmax和wmax均在x=l的自由端处。于是有
qmax
q
|xl
Fl 2 EI
Fl 2 2EI
Fl 2 2EI
wmax
w |xl
Fl 3 2EI
Fl 3 6EI
下中性层的曲率为
1M EI
这也就是位于中性层内的挠曲线的曲率的表达式。
6
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
在横力弯曲下,梁的横截面上除弯矩M=M(x)外,还 有剪力FS=FS(x),剪力产生的剪切变形对梁的变形也会产 生影响。但工程上常用的梁其跨长l 往往大于横截面高度h 的10倍,此时剪力FS对梁的变形的影响可略去不计,而有
第五章 梁弯曲时的位移
根据对称性可知,两支座处的转角qA及qB的绝对值相
等,且均为最大值,故
qmax q A qB
ql3
24 EI
最大挠度在跨中,其值为
wmax
w
|xl
2
ql 2
24 EI
l 3
2l
l 2
2
l 2
3
5ql 4 384 EI
24
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
第五章 梁弯曲时的位移
边界条件(这里也就是支座处的约束条件)的示例如 下图所示。
12
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
若由于梁上的荷载不连续等原因使得梁的弯矩方程 需分段写出时,各段梁的挠曲线近似微分方程也就不同。 而对各段梁的近似微分方程积分时,都将出现两个积分 常数。要确定这些积分常数,除利用支座处的约束条件 (constraint condition)外,还需利用相邻两段梁在交界处 的连续条件(continuity condition)。这两类条件统称为边 界条件。
当集中荷载F作用于简支梁的跨中时(b=l/2),最大转角
qmax和最大挠度wmax为
qmax qA qB
Fl 2 16 EI
35
wm a x
wC
Fl 3 48 EI
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
思考: 试求图示等截面悬臂梁在所示坐标系中的挠曲线 方程和转角方程。积分常数C1和C2等于零吗?
20
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
例题5-2 试求图示等直梁的挠曲线方程和转角方程,
并确定其最大挠度wmax和最大转角qmax。
21
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
wmax w1 |xx1 9 3lEI
l2 b2 3
由上式还可知,当集中荷载F
作用在右支座附近因而b值甚小,
以致 b2 和 l2 相比可略去不计时有
Fbl 2
Fbl 2
wmax 9
0.0642 3EI
EI
它发生在 x1
l 0.577 l 处。而此时 x l 0.500l 处(跨
3
2
该梁的边界条件为 在 x=0 处 w=0, 在 x=l 处 w=0
于是有
C2 0
及
EIw|xl
q 2
l4 6
l4 12
C1l
0
即
C1
ql3 24
,C2
0
从而有
转角方程 q w q l3 6lx2 4x3 24EI
挠曲线方程 w qx l3 2lx2 x3 24EI
23
材料力学Ⅰ电子教案
1
x
1
w w2
3/ 2
式中,等号右边有正负号是因为曲率1/为度量平面曲线 (挠曲线)弯曲变形程度的非负值的量,而w"是q = w' 沿x方
向的变化率,是有正负的。
8
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
再注意到在图示坐标系中,负弯矩对应于正值w" ,正弯矩对
应于负值的w" ,故从上列两式应有
D2 0
29
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
由另一支座约束条件 w2|x=l=0 有
EIw2
|xl
F
b l
l3 b
F l
6
a3
C2l
0
即
C2
Fb 6l
l2
b2
从而也有
C1
Fb 6l
l2
b2
30
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
从而得两段梁的转角方程和挠曲线方程如下:
F lx
x2 2
C1
EIw
F
lx2 2
x3 6
C1x
C2
该梁的边界条件为:在 x=0 处 w 0,w =0
于是得
15
C1 0,C2 0
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
从而有 转角方程 q w Fxl Fx2
EI 2EI
挠曲线方程 w Fx2l Fx3 2EI 6EI
13
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
例题5-1 试求图示等直梁的挠曲线方程和转角方程,
并确定其最大挠度wmax和最大转角qmax。
14
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
解:该梁的弯矩方程为
M x Fl x
挠曲线近似微分方程为
EIw M x Fl x
以x为自变量进行积分得
EIw
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
§5-1 梁的位移——挠度和转角 §5-2 梁的挠曲线近似微分方程及其积分 §5-3 按叠加原理计算梁的挠度和转角 *§5-4 梁挠曲线的初参数方程 §5-5 梁的刚度校核·提高梁的刚度的措施 §5-6 梁内的弯曲应变能
1
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
转角则明显不同。
4
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
在图示坐标系中,挠度w向下为正,向上为负;
顺时针转向的转角q为正,逆时针转向的转角q为负。
5
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
§5-2 梁的挠曲线近似微分方程及其积分
Ⅰ. 挠曲线近似微分方程的导出 在§4-4中曾得到等直梁在线弹性范围内纯弯曲情况
中点C)的挠度wC为
wC
w1
|xl
2
Fb 48 EI
3l 2 4b2
Fbl 2 16 EI
0.0625
Fbl 2 EI
34
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
可见在集中荷载作用于右支座附近这种极端情况下,跨中
挠度与最大挠度也只相差不到3%。因此在工程计算中,只要 简支梁的挠曲线上没有拐点都可以跨中挠度代替最大挠度。
程M2(x)仍取x截面左边的梁为分离体,使方程M2(x)中的第
一项与方程M1(x)中的项相同。
26
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
两段梁的挠曲线近似微分方程亦需分段列出,并分别进行积分:
左段梁0 x a
右段梁 a x l
挠曲线近似微分方程
EIw1
M1x
F
b l
x
积分得
EIw2
M
2
x
左段梁 (0 x a)
右段梁 (a x l)
q1
w1
Fb 2lEI
1 3
l2 b2
x
2
q2
w2
Fb 2lEI
l b
x
a
2
x2
1 3
l2
b2
w1
Fbx 6lEI
l2
b2
x2
w2
Fb 6lEI
l b
x
a
3
x
3
l2
b2
x
31
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
例题5-3 试求图示等直梁的挠曲线方程和转角方程,
并确定其最大挠度wmax和最大转角qmax。
25
材料力学Ⅰ电子教案
第五章 梁弯曲时的位移
解:约束力为
FA
F
b, l
a FB F l
两段梁的弯矩方程分别为
M1x
FA x
F
b l
x
0 x a
M
2
x
FA
x
F
x
a
F
b l
x
F
x
a
a x l
为了后面确定积分常数的方便,右边那段梁的弯矩方
转角方程 w1 等于零,得
x1
l2 b2 3
aa 2b
3
显然,由于现在a>b,故上式