莫托曼MA1400焊接机器人技术方案
MOTOMAN-EA1400N机器人控制电路的改进
i ma e e h n to Z sda g d wh nt eu i fJ NC —NTU 0 sp wee n 1i o rd o .Th r b e i fn l eole p lig sp r to ic isa ds lee to ep o lm s ial rs v dbya pyn e a a in cr ut n mal lcr — y
报警信 号 。经查 阅报警信 息 说 明 , 示 通讯 错误 ( 显 伺服 IO [ 1 3 主 接 通 单 元 (/ 机 器人 , /)1 2 , I O, 外部轴 用) 伺 服 控 和 制 基 板 间 的 通 信 异 常 ; 自伺 服 I o 通 信 (L 8) 中 断 ; 板 损 坏 或 连 接 异 常 。 经 检 查 发 现 是 机 器 人 控 制 来 / J 00 无 基 柜 内 的 电 源 接 通 单 元 J NC —NTU0 z l故 障 , 换 此 单 元 基 板 后 故 障 报 警 消 失 , 器 人 恢 复 正 常 。 然 而 电 更 机
2 1 年 第 3期 01
No 3 2 1 . . O1
湖 州 职 业 技 术 学 院 学 报
J u ol of o n r Hu h u Vo at n l an T h olgi al Co l g z o c i a o d ec n o c l e e
21年 0 01 9月
焊接机器人应用技术在积淀中强大——首钢莫托曼机器人有限公司机器人弧焊技术开发应用综述
触 摸屏 作为 系统 主操 作界 面 ,简单 直观 , 显示信息 内容广泛 洋细。通过触摸屏来完成设备 动作方式的设定并可以直接编辑夹具上各动作机
构 的动 作 顺 序 。
F ,又 签 订 了新 的 午桥焊 装项 目,继 后
问题 , 为生产 线的运行 安仝 , 品质 罩及 生产节拍 产
控 制提供 了可靠 的技术保 障 。 3 通过推 行标准 化机器 人焊 接 _ 作站 ,提 高 . T
器具 。在 f 同种 规格变 化 机和 控制系 统 的焊接 吧有 1 站 问 ,可 以实 现 T装 互 换 , 以满 足 某 种 产 作
了系统 的集成 化水平 ,缩短 了在用 户现 场 的安装
调 试周 期 ,为用户 的设 备使用 带来 方便 。 由于T
作站 的标准化 , 设备 置、 其 使用性 能及外观 效果
一
I d了然 , 而且具有 小 同的规 格 系列 , 这非 常便于
用 户 根据 需要 选 择产 品 。
4 通 过 推 行 焊接 卡具 的标 准 化 、模 块 化 设 . 汁,丌 发 出具有 自主 知 识产 权 的夹 紧装置 等关 键 技 术 ,提 高 了焊 接 卡 具 的设 汁效率 和 使用 性 能 。 山于标 准夹 紧装置 等通 用 零部件在 焊 接卡 具 中 占 有 很 大 比例 ,这 给用 户 的设备使 用及 维护 带来 极 大 的 方 便 ,也 降 低 了 设 备 的使 用 费 用 。
维普资讯
品 l嘲内 生 : 求。 配有同 格快 短+ 大昂 的要 在 , J - ‘ 专 种规
换T H 专用_装移动存放器具的焊接工作 』 :
莫托曼机器人主程序设定
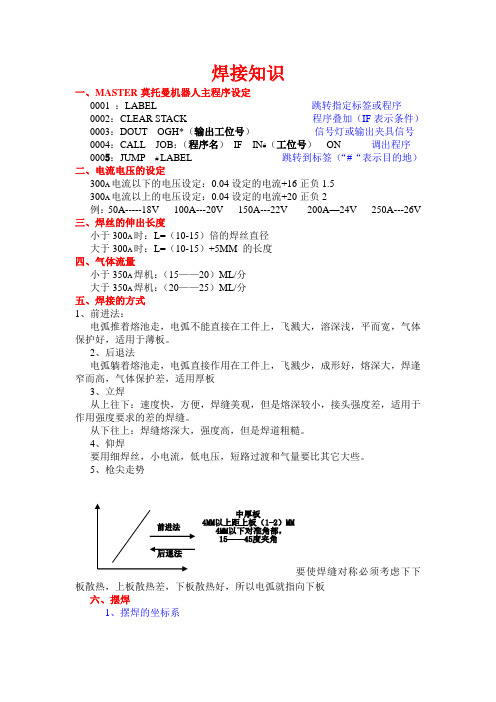
焊接知识一、MASTER莫托曼机器人主程序设定0001 :LABEL 跳转指定标签或程序0002:CLEAR STACK 程序叠加(IF表示条件)0003:DOUT OGH*(输出工位号)信号灯或输出夹具信号0004:CALL JOB:(程序名)IF IN#(工位号)ON 调出程序0005:JUMP # LABEL 跳转到标签(“#“表示目的地)二、电流电压的设定300A电流以下的电压设定:0.04设定的电流+16正负1.5300A电流以上的电压设定:0.04设定的电流+20正负2例:50A-----18V 100A---20V 150A---22V 200A—24V 250A---26V 三、焊丝的伸出长度小于300A时:L=(10-15)倍的焊丝直径大于300A时:L=(10-15)+5MM 的长度四、气体流量小于350A焊机:(15——20)ML/分大于350A焊机:(20——25)ML/分五、焊接的方式1、前进法:电弧推着熔池走,电弧不能直接在工件上,飞溅大,溶深浅,平而宽,气体保护好,适用于薄板。
2、后退法电弧躺着熔池走,电弧直接作用在工件上,飞溅少,成形好,熔深大,焊逢窄而高,气体保护差,适用厚板3、立焊从上往下:速度快,方便,焊缝美观,但是熔深较小,接头强度差,适用于作用强度要求的差的焊缝。
从下往上:焊缝熔深大,强度高,但是焊道粗糙。
4、仰焊要用细焊丝,小电流,低电压,短路过渡和气量要比其它大些。
5、枪尖走势要使焊缝对称必须考虑下下板散热,上板散热差,下板散热好,所以电弧就指向下板六、摆焊1、摆焊的坐标系水平方向:从壁到接近点一侧的方向前进方向:从摆焊起点到终点的方向壁的方向:机器人坐标Z 轴的方向2、摆焊的三种动作形式单摆、三角摆、L 摆,每种焊接形式分为:0平滑、1无平滑。
3、摆焊要素速度:用频率设定。
焊缝宽:在单摆时用振幅设定角度:包括摆动的角度和行进的角度,一般0-180度L 摆和三角摆时要设定:纵方向距离和横方向距离,一般要设定为1MM 到25MM 之间。
MA1400安川机器人使用手册
YASKAWA MOTOMAN-MA1400机器人使用说明书型号:YR-MA01400-A00(标准型) YR-MA01400-A01(S•L•U轴装有限位开关)YR-MA01400-A10(倒挂型)YR-MA01400-A11(倒挂 S•L•U轴限位开关)请确保使用说明书到达本产品的最终使用者手中。
MOTOMAN-MA1400机器人使用说明书DX100 使用说明书DX100 操作要领书DX100 维护保养说明书「DX100操作要领书」根据用途不同内容有异,请一定确认与用途是否相同。
SGMHW0484968HW0484968 MA1400HW0484968 MA1400安全注意事项使用前(安装、运转、保养、检修),请务必熟读并完全掌握本书说明书和其他附属资料,在熟知全部设备知安全知识及注意事项后再开始使用。
本说明书中的安全注意事项分为“危险”、“注意”、“强制”、“禁止”四类分别记载。
另外,即使是“注意”所记载的内容,也会因情况不同而产生严重后果,因此任何一条注意事项极为重要,请勿不严格遵守。
HW0484968 MA1400HW0484968 MA1400HW0484968MA1400本书常用词汇定义「MOTOMAN」是安川电机工业机器人的商品名。
MOTOMAN由机器人本体“机器人”、机器人控制柜“DX100”、“DX100示教编程器”和“连接电缆 ”构成。
在这本书中,这些部分如下表所示。
机器人各部分本书的表示DX100控制柜DX100DX100示教编程器示教编程器机器人到控制柜的连接连接电缆电缆MA1400警告牌的说明机器人上贴有如下警告牌。
请严禁遵守警告牌上记载的事项。
处警告牌外,机器人上还贴有打印机型号、订货号、重量等重要内容的铭牌,请在充分确认以上内容基础上使用。
图 : 警告牌位置1 开箱检查MA1400 1.1 确认装箱内容1开箱检查1.1确认装箱内容到货之后,请确认装箱内容。
标准规格机器人有以下四部分内容(如有选项请确认其他内容):• 机器人• DX100• 示教编码器• 机器人电缆(机器人至DX100之间的电缆)HW04849681 开箱检查MA1400 1.2 确认订货号1.2确认订货号请确认机器人与DX100的订货号是否一致。
时代机器人车桥弧焊系统方案书
时代机器人车桥弧焊系统方案书目录1.工作站介绍2.设备清单3.主要设备介绍及参数4.工艺流程5.设备使用条件6.项目进度计划7.技术服务一.工作站介绍1.1用户提供工件图纸1.2材质:Q235A 碳钢平均厚度:δ8 1.3焊接方式:CO2 气保焊1.4工作站图示1.5夹具与变位机安装图示注:1)以上布局图仅供参考,以最终设计为准。
2)以上仅为效果图,最终以实物为准。
1.6简介此系统采用双工位设计,机器人本体为MOTOMAN MA1400,配套时代A160-500 焊接电源,宾采尔风冷ABIROB A 500 焊枪。
人工上料,工件端部圆柱定位,手动锁紧。
二.设备清单序号名称型号及规格数量(套)备注1 机器人机器人本体MA1400 1 MOTOMAN 机器人控制柜DX100 1 MOTOMAN2 焊接电源A160-500 1 北京时代3 电气控制柜 1 北京时代4 变位机BWJ L-1000 2 北京时代5 风冷焊枪及夹持器ABIROB A500 1 BINZEL6 送丝装置、气体调节器、控制线缆1 北京时代7 回转架和夹具 2 北京时代8 其他安装调试、培训北京时代三.主要设备介绍及参数3.1机器人本体MA1400 机器人本体是专门为焊接工业设计的机器人。
除了具有和其他机器人共有的基本功能之外,该机器人本体采用内置电缆式设计,送丝电缆,保护气体管线,冷却管线都集成在机器人内部,这样可以有效的避免干涉,提高机器人的可达性能。
机器人的腕部法兰也是中空设计,配合内置式焊枪,外观简约利落,可以深入狭窄的腔体内部进行焊接,而不需要特殊的加长焊枪。
机器人驱动电机采用Σ V 控制电机,使用最新一代优化算法,机器人灵活性能更好。
内置式集成设计深入狭窄腔体内部焊接基本运行参数表关节类型垂直多关节手臂式关节数 6负载3KG垂直可达性2511mm水平可达性1434mm重复定位精度0.08mm关节运动范围S 轴-170°/+170°L 轴-90°/ 155U 轴-175°/+190°R 轴-150°/+150°B 轴-45°/+180°T 轴-200°/+200°关节最大速度S 轴200°/sL 轴200°/sU 轴220°/sR 轴410°/sB 轴410°/sT 轴610°/s净重130KG抱闸数 6 轴电源容量 1.5KVA 许用扭矩R 轴8.8N²MB 轴8.8N²MT 轴 2.9N²M 许用转动惯量R 轴0.27KG²M²B 轴0.27KG²M²T 轴0.03KG²M²可达性范围图3.2机器人系统控制柜 DX100和示教编程器DX100 控制柜是MOTOMAN 机器人新一代控制,针对新型高性能伺服电机和高速运算做了重要的改进。
MOTOMAN HP系列EA弧焊专用机器人
MOTOMAN HP系列EA弧焊专用机器人
佚名
【期刊名称】《汽车制造业》
【年(卷),期】2004(000)010
【摘要】MOTOMAN-HP系列机器人是MOTOMAN最新型的机器人,其中的MOTOMAN-EA 1400N机器人是专门用于弧焊焊接的机器人。
该机型动作范围大、速度快,回转轴的速度达到每秒140°。
作为焊接机器人,该机型充分考虑了焊接过程中机器人动作的可达性与灵活性,特别是送丝电缆的柔韧性与耐用性。
送丝电缆电缆从机器人的上臂中穿过,上臂的内部空间经
【总页数】1页(P62)
【正文语种】中文
【中图分类】U469.11
【相关文献】
1.弧焊机器人MOTOMAN—UP20离线编程系统 [J], 胡中华;王艳
2.弧焊机器人MOTOMAN示教编程方法 [J], 胡中华;陈焕明;许明星;王晓峰;李海州
3.MOTOMAN新型HP-E系列机器人 [J], 曾孔庚
4.OpenGL在MOTOMAN弧焊机器人动态仿真中的应用 [J], 熊震宇;王冬祥
5.Motoman-L10ω弧焊机器人在汽车千斤顶焊接生产中的应用 [J], 李会英
因版权原因,仅展示原文概要,查看原文内容请购买。
MOTOMAN点焊机器人系统及应用
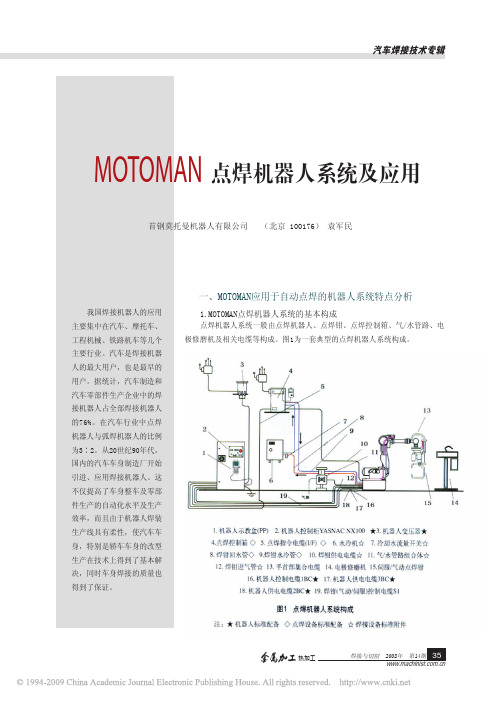
我国焊接机器人的应用 主要集中在汽车、摩托车、 工程机械、铁路机车等几个 主要行业。汽车是焊接机器 人的最大用户,也是最早的 用户。据统计,汽车制造和 汽车零部件生产企业中的焊 接机器人占全部焊接机器人 的76%。在汽车行业中点焊 机器人与弧焊机器人的比例 为3∶2。从20世纪90年代, 国内的汽车车身制造厂开始 引进、应用焊接机器人。这 不仅提高了车身整车及零部 件生产的自动化水平及生产 效率,而且由于机器人焊装 生产线具有柔性,使汽车车 身,特别是轿车车身的改型 生产在技术上得到了基本解 决,同时车身焊接的质量也 得到了保证。
根据这些问题,安川公司为点焊系统专门设计开 发了点焊专业机器人M O T O M A N—E S系列,具备有如 下特点:
首先,机器人点焊电缆、冷却水管以及气管为内 藏式,保证该电缆对焊接不构成干涉,使机器人的示教 效率有很大的提高。通过试验及实践证明,其示教时间 只是普通点焊机器人示教时间的40%。
对应于伺服焊钳的特点,E S系列机器人也开发 出了许多辅助功能,对于机器人的焊接质量、工作效 率及示教工作的方便性都有很大的提高。其辅助功能 如下:
1. 间隙示教 (1)目的 分别设定上电极和下电极的间隙 值,在打点位置进行示教并登录,上下电极分别按间 隙值自动偏移并自动登录位置点,这样每示教一个焊 点就可以少示教两个点,示教起来简单方便。 (2)功能 分别按设定的间隙偏移后自动登录 位置,从而实现位置的登录(见图9)。
热加工
焊接与切割 2008年 第14期 35
原名《机械工人》 热点技术 Technology Highlights
2. 点焊专业机器人M O T O M A N—E S系列的主 要特点
从图1可以看出,点焊机器人系统具有管线繁多的 特点,特别是机器人与点焊钳间的连接上,包括点焊钳 控制电缆、点焊钳电源电缆、水气管等。而机器人在生 产线上的工作空间相对比较紧张,管线的处理、排布在 实际生产过程中,直接影响到机器人的运动速度和示教 的质量,也容易给设备的生产维护留下很多隐患。
MOTOMAN-MA,VA系列

软件
干涉检查功能
选项
缩 小安全栏
选项
常时监视高密度安装的机械臂间距离,当其快 要发生碰撞时将自动停止(防止因程序错误所
导致的机械臂间冲突)
机器人动作范围限制取得安全种类3软件双重 化的安全认证,所以能够把安全栏的范围设定 为工作必要最小范围。(开发中)
不间断地检查,被定义的16个立方体 与机械臂之间的干 涉,防止机器人与 工件或周边夹具间的接触。 ( 下图参照)ɻ( 开发中 )
S轴( 旋 转 )
L轴( 下 臂 )
E轴( 肘 )
动作范围 U 轴 ( 上 臂 )
R 轴 ( 手腕旋转 )
B 轴 ( 手腕摆动)
T 轴 ( 手腕回转 )
S轴( 旋 转 )
L轴( 下 臂 )
E轴( 肘 )
最大速度 U 轴 ( 上 臂 )
R 轴 ( 手腕旋转 )
B 轴 ( 手腕摆动)
T 轴 ( 手腕回转 )
3
MOTOMAN-VA1400
可搬重量 3 kgɼ最大伸长度1434mm
世界首创 7 轴弧焊
机器人
用7轴在焊接部分经常确保最为合适的机器人姿势,提高品质。
机械臂与底部可内置电缆,不仅达到了高密度配置,还轻松避 免了工件与夹具间的干涉,提供了节省空间的焊接设备。 世界最快的动作速度和最广的动作范围,提高生产力。
6*
6-M4×P0.7 深 :10
30˚ P.C.D.56
*:(φ42H7 范围)
φ 6H7 深 :6
视图 A
155˚ R270
190˚
150
640 P
30
R
122
莫托曼机器人调用子程序设计与应用
莫托曼机器人调用子程序设计与应用发布时间:2023-02-01T05:54:09.398Z 来源:《城镇建设》2022年9月18期作者:高贺,李付,宣星虎,夏碧峰,沈涛,张富[导读] 莫托曼机器人主要对试样进行提取高贺,李付,宣星虎,夏碧峰,沈涛,张富北京首钢股份有限公司质量检验部,河北迁安,064404摘要:莫托曼机器人主要对试样进行提取、搬运。
在运行期间由于生产情况会出现各种问题,给维护人员带来了诸多困难。
本文将对莫托曼机器人程序结构进行介绍,通过优化机器人程序提高设备稳定性。
关键词:机器人;常见故障;莫托曼莫托曼机器人为6轴机器人,由各伺服电机单独控制,通过按动示教编程器上每个轴的操作键,使机器人每个轴产生所需动作。
如:在机器人坐标下,手动操作手柄上的X、Y、Z按键,可控制各轴单独运动,[1]1 机器人回原点操作1.1 机器人回原点操作当机器人运行中出现故障导致报警时,机器人可能停留在任何位置,这时候需要手动操作回原点。
具体操作如下:(1)将钥匙打到手动模式,解除报警;(2)报警消除后,选择合适的坐标;(3)选择当前机器人执行程序或者其他有关节点程序亦可,点击伺服启动,操作机器人各个轴,使其达到安全位置;(4)在主界面左边菜单栏里面选择“机器人”然后选择“作业原点”(不是第二作业原点)这时主界面会显示各个轴的当前脉冲当量;(5)同时按下上电开关和前进按钮,直到脉冲差值为零,回原点完成,机器人停止动作。
1.2 输入输出的使用示教器上点选输入输出,在显示区找到通用输入和通用输出,手动控制信号动作选通用输出选项;手动检查有没有信号,在通用输入内显示。
通过翻页键选择需要找的信号位(转换+翻页为向上翻页),把光标移动到想要控制的命令区,按{联锁}+{选择}键,通用输出里面圆圈有空心变实心说明操作完成。
空心代表没有输出,实心则表示有输出。
1.3 设定位置等级位置等级是指机器人经过示教位置时的接近程度。
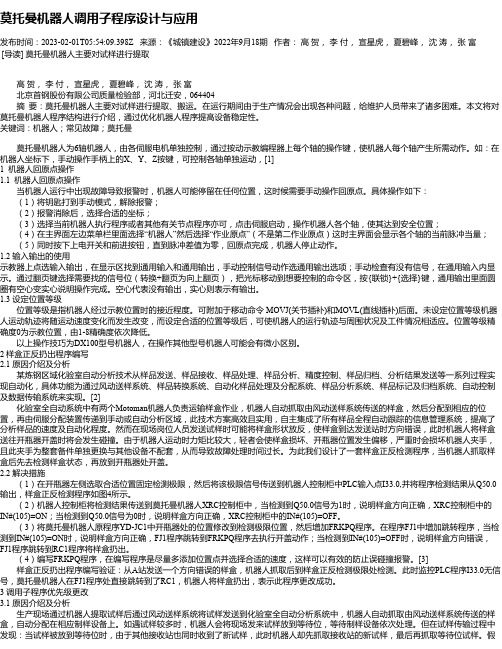
MOTOMAN焊接机器人培训
焊接电源
送丝机构
焊枪电缆
焊焊丝丝输输出出的的尾尾端端,,保保 证证焊焊接接电电弧弧的的稳稳定定性性。。
Shougang Motoman Robot Co., Ltd.
焊枪
输输送送焊焊接接时时所所需需要要的的 焊焊丝丝、、保保护护气气或或冷冷却却 水水等等。。
6
5.1 熔化极气保焊实施的关键点
SSGGMM
(15) 冷却水冷水管 (16) 冷却水回水管 (17) 水流开关 (18) 冷却水箱 (19) 碰撞传感器电缆 (20) 功率电缆(-) (21) 焊机供电一次电缆 (22) 机器人控制柜NX100 (23) 机器人示教盒(PP) (24) 焊接指令电缆(I/F) (25) 机器人供电电缆 (26) 机器人控制电缆 (27) 夹具及工作台
Shougang Motoman Robot Co., Ltd.
13
5.8 熔化极气保焊实施的关键点
SSGGMM
i)焊接保护气的特性
二氧化碳气体(CO2)在电弧电压升高时,电弧的吹力增大,易使熔滴颗粒变大,从 而产生较大的飞溅。但是提高热输入量可得到宽、深的焊缝。
ቤተ መጻሕፍቲ ባይዱ
氩气(Ar)由于电离的潜能小,又易电离,可以保证起弧并维持其稳定性。并且,非 活性气体可避免氧化物的产生,可以得到优良机械性能的焊缝。但是在高电流密度下, 电弧易集中,得到窄深的焊缝。
法的选择等,以满足焊接工件对焊接自动化的要求。
Shougang Motoman Robot Co., Ltd.
18
8 适合机器人的焊枪
SSGGMM
用于焊接机器人的焊枪的特点: 机器人焊枪须满足机器人自动化焊接所要求的高承载能力。对于焊枪而
言,与焊接电源类似,也有其使用的负载持续率衡量其工作能力。
MOTOMAN机器人自动焊接系统设计
MOTOMAN机器人自动焊接系统设计陈浩;成群林;姜恒;王学远【摘要】为实现焊接过程的自动化,提升制造企业的生产自动化水平,设计了一种基于DeviceNet现场总线的机器人自动焊接系统.由MOTOMAN DX100弧焊机器人、EWM交直流焊接电源和工业PC构建现场总线网络;机器人通过总线控制焊接电源动作,并实时设定焊接过程工艺参数;采用基于工业PC的监控系统进行焊机工作状态的监控和焊接参数的实时采集与存储.应用结果表明,该系统操作简单、稳定性好,具有一定的推广价值.【期刊名称】《自动化仪表》【年(卷),期】2016(037)009【总页数】5页(P59-63)【关键词】机器人;PLC;工业PC;监控系统;现场总线;LabVIEW;自动焊接【作者】陈浩;成群林;姜恒;王学远【作者单位】上海航天精密机械研究所,上海201600;上海航天精密机械研究所,上海201600;上海航天精密机械研究所,上海201600;上海航天精密机械研究所,上海201600【正文语种】中文【中图分类】TH-39;TP274工业机器人具有通用性强、定位准确、性能可靠等特点,被应用于焊接领域,可以克服传统手工操作质量不稳定的缺点,提高焊接质量,增加产量[1]。
当前,焊接设备集成商普遍采用离散的I/O硬接线方式实现机器人与焊机的通信。
在恶劣的焊接环境下,各种干扰因素可能影响系统性能,降低焊接质量。
此外,由于需要调节的工艺参数较多,传统的离散I/O方式使得现场布线繁杂,维护成本较高。
本文基于DeviceNet现场总线技术,设计了一种由MOTOMAN机器人、EWM交直流焊接电源以及工业PC组成的自动焊接系统,实现了焊接过程的自动化以及工艺过程的实时监控与数据记录。
总线通信的方式可以解决现场布线繁杂的问题,同时提高系统通信的可靠性和稳定性,保证工业过程质量[2]。
MOTOMAN机器人控制柜DX100控制本体的运动,将机器人臂送至预期工位,焊接电源则控制安装在机器人执行末端的焊枪、送丝机构以及保护气路进行焊接。
莫托曼MA1400焊接机器人技术方案解析
目录一.焊接系统构成介绍 (2)二. MOTOMAN-MA1400N机器人本体介绍 (3)三.机器人控制柜及示教盒说明 (7)3.1机器人控制柜(DX100): (7)3.2机器人示教编程器(PP): (10)四.焊机MOTOMAN-EL350Ⅱ (11)五.Tool Sight (14)5.1.TOOL SIGHT 结构 (15)5.2.TOOL SIGHT 原理 (15)5.3.TOOL SIGHT 操作方法 (16)六.清枪剪丝装置 (18)6.1概述 (18)6.2技术数据 (18)七弧焊机器人系统标准功能说明 (19)7.1MOTOMAN 弧焊机器人的主要特点 (19)7.2焊接机器人的标准功能介绍 (20)八.弧焊工作站安装环境条件及动力资源要求 (24)九.技术培训及售后服务 (25)9.1技术培训 (25)9.2质量保证期和质量保证范围 (25)9.3售后服务 (25)一.焊接系统构成介绍二. MOTOMAN-MA1400N机器人本体介绍该工作站选用的MOTOMAN-MA1900N机器人是当今世界最先进的弧焊专用机器人,它的动作速度、精度及可靠性体现了机器人的先进水平。
它与高性能的DX100 控制柜及配备6.5"LCD 彩色显示触摸屏的示教编程器的结合,提高了机器人的可操控性,使您的机器人作业系统更加完美。
其先进技术如下所述:本系统中选用我公司的属于当今世界最先进的弧焊专用机器人MOTOMAN-MA1900N,如右图所示,其主要特点如下:1)同级别机器人中运动性能最好与旧机型相比,MOTOMAN-MA 系列机器人具有更快的轴动作速度。
轻型机体和具备轨迹精度控制及振动抑制控制的DX100 控制柜的有机结合,减弱了机器人启动和停止瞬间的颤动,从而缩短了机器人的运行周期。
2)可焊工件的范围变大MOTOMAN-MA 系列机器人将焊丝、焊枪电缆和冷却水管内藏于机器人手臂内,消除了焊枪电缆与工件和周边设备的干涉。
基于松下TM-1400型焊接机器人的焊接轨迹示教分析
基于松下TM-1400型焊接机器人的焊接轨迹示教分析
冯振;赵干;郭朝博;李兴霞;吴金杰
【期刊名称】《河南机电高等专科学校学报》
【年(卷),期】2017(025)002
【摘要】焊接机器人是一种仿人操作、自动控制、可重复编程并能在三维空间完成各种焊接作业的自动化生产设备,能在恶劣的环境下连续工作并提供稳定的焊接质量,可以提高工作效率,减轻劳动强度.文章以松下TM-1400型焊接机器人为载体,对常见直线和圆弧焊接轨迹进行示教分析,并对相关示教命令程序进行解释说明.【总页数】5页(P8-12)
【作者】冯振;赵干;郭朝博;李兴霞;吴金杰
【作者单位】河南工学院材料工程系,河南新乡 453003;河南工学院材料工程系,河南新乡 453003;河南工学院材料工程系,河南新乡 453003;河南工学院材料工程系,河南新乡 453003;河南工学院材料工程系,河南新乡 453003
【正文语种】中文
【中图分类】TP242
【相关文献】
1.焊接机器人的示教轨迹优化 [J], 周鲲;邵华
2.基于轨迹编程的示教式焊接机器人控制技术 [J], 林砺宗;张晓进
3.6R焊接机器人逆解算法与焊接轨迹误差分析 [J], 韩兴国;宋小辉;殷鸣;陈海军;殷国富
4.基于示教轨迹优化的船厂焊接机器人控制系统研究 [J], 张艺;夏志亭
5.基于Matlab的UR5机器人相贯焊接模型运动学分析和轨迹规划 [J], 杨成超因版权原因,仅展示原文概要,查看原文内容请购买。
T-02-O-Y-212MA1400 机器人接地维护-教案.
授课章节 第2章 配线维护 2.1 接地线维护
授课形式 讲练
授课时间 第 周 周 ( 月 日) 第 至 节
教学目标
知识目标:了解机器人配线维护类型 能力目标:会机器人接地线维护
教学重点 MA1400 机器人接地维护、DX100控制柜接地线维护步骤 教学难点
MA1400 机器人接地维护
教 学 过 程
方法手段 时间分配
导入
一、你对机器人使用了解哪些安全因素? 3分钟
讨论 重点讲解及任务分析
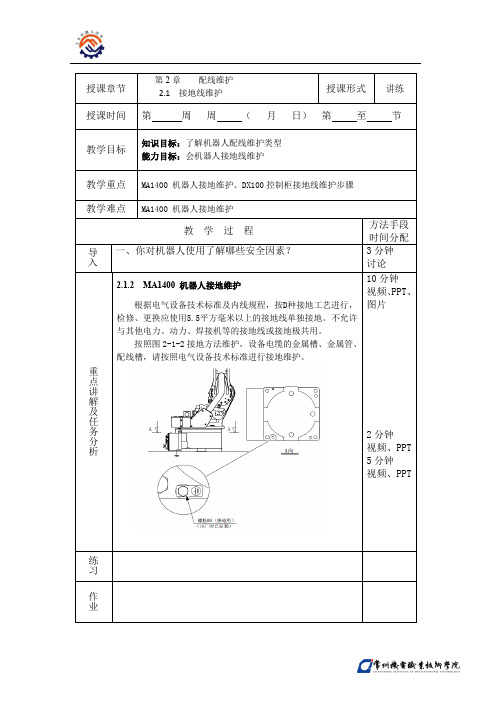
2.1.2 MA1400 机器人接地维护
根据电气设备技术标准及内线规程,按D 种接地工艺进行,检修、更换应使用5.5平方毫米以上的接地线单独接地。
不允许与其他电力、动力、焊接机等的接地线或接地极共用。
按照图2-1-2接地方法维护,设备电缆的金属槽、金属管、配线槽,请按照电气设备技术标准进行接地维护。
10分钟
视频、PPT 、
图片
2分钟 视频、PPT 5分钟 视频、PPT
练习
作业。
Panasonic-TA1400型弧焊机器人应用探析
Panasonic-TA1400型弧焊机器人应用探析∗杨新华;朱蓉英;孙登科【摘要】In the paper,based on the application of arc welding robot teaching programming and operation of Panasonic-TA1400-type,the two aspects were analyzed of the influence of welding process planning and welding process test about welding quality and welding robot application of talent ability requirements.It was summarized that arc welding robot teach programming methods and techniques of straight swing and arc swing,the three aspects were described including the basic operation settings,process planning of welded structures production,welding test and analyzed importance of the promotion and application of arc welding robot,which requires complex talents.%在应用 Panasonic-TA1400型弧焊机器人进行示教编程与焊接操作的基础上,从焊接工艺编制及焊接工艺试验对焊接质量的影响和焊接机器人应用推广对人才能力的要求2个方面进行了分析,总结了弧焊机器人直线摆动和圆弧摆动示教编程的方法及技巧,阐述了弧焊机器人基本操作与基本设置、焊接结构生产工艺编制、焊接工艺试验与分析三个方面对弧焊机器人推广应用的重要性,提出了弧焊机器人推广应用是对焊接工艺与示教技能综合能力的挑战以及弧焊机器人技术的推广应用需要复合型人才的观点。
首钢莫托曼机器人有限公司--关键信息点及建议

●成立时间、注册资金、主营:1996年8月,中国第一家工业机器人合资公司(首钢莫托曼机器人有限公司(SGM));注册资金700万美元;主营日本安川MOTOMAN系列机器人产品●合资方及合资比列:首钢总公司(45%)、日本株式会社安川电机(43%)、日本岩谷产业株式会社(12%);●主要应用及应用领域(排序)主要应用:弧焊、点焊、涂胶、切割、搬运、码垛、喷漆、洁净(新领域):(有两个其公司的重点应用:焊为其最重点、其次为涂胶);(有喷漆的应用,但全针对汽车且无太成功的案例)应用领域:汽车、摩托车、家电、烟草、陶瓷、工程机械、矿山机械、物流、铁路机(最重点为汽车;鲜见在家具行业的应用)●主要的产品系列及受限应用方式●技术产品主要合作伙伴:机器人(臂):安川焊接电源、焊枪、激光跟踪系统:福尼斯、林肯、TBI、META、Fronius(焊接电源)PLC控制器:西门子公司的S7-300系列主操作盘:西门子公司TP系列触摸屏机器人控制系统:安川最新的NX100系列控制柜●首钢和安川的主要分工和职责:首钢:严格意义上讲是对一类特定工业自动化,点面性应用的,具备一定按用户操作应用所需进行操作应用及操作流程监控开发的系统集成商(厂)。
主要职责:✧销售及按需方案设计:从工艺编排到合格的工件交付——全方位的系统解决方案;参与到焊装线工艺设计、生产车间平面布置、零部件尺寸精度和重复性控制、焊装辅具设计制造、工件物流、样件试制、成品检测、操作维护人员培训的全过程中,协助用户制定规划并完成整个产品的制✧现场安装、调试、培训、试产;✧售后服务、技术支持、在运产品升级及损耗部件更换✧主要特点或特长:✓中国区销售和服务、✓应用及用于集成所需的软件开发、激光跟踪技术开发(估计是用于定位)、图像(估计是应停留在图形层面)识别技术开发、远程(估计是局域网为多台应用提供联网支持)监控技术开发安川:核心技术及设备提供商及合作伙伴,主要职责就三个:✧向首钢(或莫托曼)提供机器人(臂)产品和服务✧向首钢(或莫托曼)推荐按需的第三方技术(或产品)合作伙伴(如西门子、Fronius等)✧向首钢(或莫托曼)提供技术支持和培训●对刘明德与之交往的点滴:因家具喷漆样式多,维度复杂,莫托曼喷漆机器人(其原设计是用于汽车)对刘的需求有一个较长期期的专业交流过程刘需让其相信有一定的市场容量才能引起莫托曼进行集成开发的兴趣,但如莫托曼如接受了刘所描述的市场需求是一个长期稳定的市场,则:✧莫托曼自行组建事业部提供此系统(包括喷漆房),或✧莫托曼提供标准系列产品,向全国提供,刘也就是其全国客户之一建议刘向首钢学习,第一步战略是与类似于安川这样的核心技术及产品供应商合作,成为具备二次开发能力的系统集成商,以后的事水到渠成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一.焊接系统构成介绍 (2)二. MOTOMAN-MA1400N机器人本体介绍 (3)三.机器人控制柜及示教盒说明 (7)3.1机器人控制柜(DX100): (7)3.2机器人示教编程器(PP): (10)四.焊机MOTOMAN-EL350Ⅱ (11)五.Tool Sight (14)5.1.TOOL SIGHT 结构 (15)5.2.TOOL SIGHT 原理 (15)5.3.TOOL SIGHT 操作方法 (16)六.清枪剪丝装置 (18)6.1概述 (18)6.2技术数据 (18)七弧焊机器人系统标准功能说明 (19)7.1MOTOMAN 弧焊机器人的主要特点 (19)7.2焊接机器人的标准功能介绍 (20)八.弧焊工作站安装环境条件及动力资源要求 (24)九.技术培训及售后服务 (25)9.1技术培训 (25)9.2质量保证期和质量保证范围 (25)9.3售后服务 (26)一.焊接系统构成介绍二. MOTOMAN-MA1400N机器人本体介绍该工作站选用的MOTOMAN-MA1900N机器人是当今世界最先进的弧焊专用机器人,它的动作速度、精度及可靠性体现了机器人的先进水平。
它与高性能的DX100 控制柜及配备6.5"LCD 彩色显示触摸屏的示教编程器的结合,提高了机器人的可操控性,使您的机器人作业系统更加完美。
其先进技术如下所述:本系统中选用我公司的属于当今世界最先进的弧焊专用机器人MOTOMAN-MA1900N,如右图所示,其主要特点如下:1)同级别机器人中运动性能最好与旧机型相比,MOTOMAN-MA 系列机器人具有更快的轴动作速度。
轻型机体和具备轨迹精度控制及振动抑制控制的DX100 控制柜的有机结合,减弱了机器人启动和停止瞬间的颤动,从而缩短了机器人的运行周期。
2)可焊工件的范围变大MOTOMAN-MA 系列机器人将焊丝、焊枪电缆和冷却水管内藏于机器人手臂内,消除了焊枪电缆与工件和周边设备的干涉。
没有了电缆的干涉,MA机器人可以实现以前被认为比较困难的工件内部的焊接、连续焊接和圆周焊接。
3)送丝顺畅送丝机构安装在最佳位置,焊丝送入焊枪电缆内时比较平直,腕部B 轴仰起时焊枪电缆仅有轻微的弯曲。
这些改进大提高了焊接质量。
4)工作范围大并且本体结构设计紧凑送丝机的外形尺寸减小及安装位置的优化使送丝机与周边设备的干涉半径降低,仅为R325mm,而最大可达半径为R1434mm。
【EA1900N 机器人操作机功能参数说明】结构垂直多关节形(6 自由度)最大动作范围S 轴(回旋)±180°L 轴(下臂)+155°,-110°U 轴(上臂)+255°,-165°R 轴(手腕回旋)±150°B 轴(手腕摆动)+180°,-45°T 轴(手腕回转)±200°最大动作速度S 轴 2.96rad/s,170°/s L 轴 2.96rad/s,170°/s U 轴 3.05rad/s,175°/s R 轴 5.93rad/s,340°/s B 轴 5.93rad/s,340°/s T 轴9.08rad/s,520°/s允许力矩R 轴8.8N·m B 轴8.8N·m T 轴 2.9N·m允许惯性力矩(GD2/4) R 轴0.27Kg·m B 轴0.27Kg·m T 轴0.03Kg·m重复定位精度±0.08mm 负载质量 3 Kg电源容量 2.8 kVA本体质量280Kg安装环境温度0~45°湿度20~80%RH(不能结露)振动 4.9m/s2以下其他* 避免易燃,腐蚀性气体、液体* 勿溅水、油、粉尘等* 勿近电气噪声源【EA1900N 机器人操作机工作范围示意图】三.机器人控制柜及示教盒说明3.1机器人控制柜(DX100):机器人控制柜DX100(如图所示),主要由主控、伺服驱动、内置PLC 等部分组成。
除了控制机器人动作外,还可以实现输入输出控制等。
主控部分按照示教编程器提供的信息,生成工作程序,并对程序进行运算,算出各轴的运动指令,交给伺服驱动;伺服驱动部分将从主控来的指令进行处理,产生伺服驱动电流,驱动伺服电机;内置PLC 则主要进行输入输出控制。
控制柜在机器人进行作业的时候,通过输入输出接口,给焊机发出焊接指令,并监控焊机的工作情况。
同时还对周边装置进行控制。
其主要功能如下:ARM(高级机器人动作)控制* 多轴/复合系统控制;* 高精度轨迹控制;* 最佳加速/减速控制;* 减震控制;* 轨迹恒定性控制;这种高级控制有助于:提高工作质量、缩短空行程时间、减少系统中断、缩短示教时间、安全性提高。
转角高速作业精确控制机器人的轨迹控制得到改进,速度变化控制在最低范围。
此外,还运用了诸如快速接近以缩短空行程时间的最优化功能。
机器人自身碰撞检测功能这种功能可以有效地对机器人与外部设备的碰撞进行检测,并立即停止机器人的运行,以保护机器人及被碰设备免受损害。
为了区分机器人是发生了碰撞还是正常工作时有较大的动载荷,可以预先对碰撞强度判定标准进行设定。
机器人随时对所受载荷进行检测,当载荷值超过设定标准后,就判断为发生了非正常碰撞而立刻停机。
这个判定标准在碰撞水平文件中设定,共有9 个文件可用。
在一个作业程序中,还可根据作业的性质,随时改换碰撞强度的判定标准。
也就是说,在一个程序中,在不同的程序段,选用不同的标准,即在程序中使用“SHCKSET”命令修改设定标准。
例如,进行装配作业时,因为机器人的操作力比较大,将判定值适当设置大一点,以免出现误判断。
而在非接触作业中,可以将判定值设得小些,可以很灵敏地检测出意外的碰撞,起到很好的保护作用。
客户还可以根据具体情况决定碰撞检测功能是否有效。
当检测到碰撞发生停机后,可以很方便的进行复位,在排除了碰撞原因后,使机器人可以继续运行。
【DX100 控制柜技术规格】DX100 控制柜构造直立密封型尺寸标准尺寸(在有外部轴追加时尺寸有所不同)冷却系统间接冷却概略重量标准重量周边温度0℃~+45℃(运转时)-10℃~+60℃(运输保管时)相对湿度最大90%,不允许结露电源3相AC200/220V(+10%~-15%),50/60 Hz 接地接地阻抗:100 Ω或以下,专用接地系统输入输出信号专用信号(硬件):输入:17,输出: 3通用信号(标准):输入:40,输出:40 通用信号(选项):输入:1024,输出:1024位置控制绝对值编码器驱动系统AC伺服用伺服系统加减速控制软件伺服控制存储容量60,000步,10,000条指令最多10,000步梯形图扩展槽PCI:主CPU2槽,伺服CPU1槽LAN(连接到上位机)1(10BASET/100BASETX)涂装颜色芒塞尔值5Y7/1(参考值)接口RS-232C:1通道【NX100 控制柜的功能说明】示教盒操作坐标系选择关节、直角/圆柱、工具及用户坐标系示教点修改插入,删除或修改(可独立修改机器人轴和外部轴)点动操作可实现轨迹确认单步前进,后退,连续行进速度调整在机器人工作中和停止中均可微调定时器设定设定单位0.01秒快捷功能直接打开功能接口CF卡插槽(示教编程器上)RS-232C(控制基板上)应用弧焊、点焊、搬运、通用及其它安全措施基本安全标准JIS(日本工业标准)安全速度设定可实现安全保护方式通过信号触发进行慢速再现干涉监视领域S轴干涉监视(扇形),立体空间干涉监视自诊断功能报警两个系统(轻故障,重故障),故障分类和数据显示用户报警显示能显示周边设备报警信息机械锁定对周边设备进行运行测试(机器人不动作)门互锁MCCB置于“OFF”位时,可开安全门维护功能累计运行时间显示控制电源接通时间,伺服电源接通时间,再现时间,操作时间,工作时间报警显示报警内容及以往报警记录输入/输出诊断可模拟使能/使不能的输出工具常数校准使用主机具进行工具尺寸的自动校验(自动生成)编程功能编程方式菜单引导方式程序语言机器人语言:INFORMⅢ动作控制关节运动、直线及圆弧插补、工具姿态控制速度设定功能百分比设定(关节运动),0.1mm/s设定(插补),角速度设定(工具姿态控制)程序控制命令跳转命令,调用命令,定时命令,机器人停止,机器人工作中一些命令的执行变量全程变量、局部变量变量类型字节型、整数型、双精度型、实数型、位置型输入/输出命令离散输入/输出控制、模拟输出控制、组方式输入/输出处理3.2机器人示教编程器(PP):示教编程器是操作者与机器人间的主要交流界面。
操作者通过示教编程器对机器人进行各种操作、示教、编制程序,并可直接移动机器人。
机器人的各种信息、状态通过示教编程器显示给操作者。
此外,还可通过示教编程器对机器人进行各种设置。
其特点如下:* 材质:强化塑料外壳(含护手带)* 操作键:下拉菜单键、选择键、轴操作键、数字/应用键、急停按钮、安全开关等。
* 便于监视触摸屏:清晰且易于阅读的显示屏LCD 6.5宽。
* 中文显示及中文资料更有利于中国的操作者掌握机器人操作技巧。
* 十字光标键提高了操作性:眼睛不必离开显示屏,即可进行菜单选择,不必改变手与手指的位置即可实现顺序操作。
* 可视菜单引导系统:菜单基于作业对象、采用图标显示、下拉菜单与视窗软件类似。
* 焊接专用键的设计,方便了操作者编制作业程序。
* 机器人示教盒的操作界面能够任选中/英/日中的任意文字,且两种文字可方便切换。
* 机器人系统说明备有中文技术资料,极大地方便了操作者学习和使用。
【DX100 机器人示教盒技术规格】DX100 示教盒材质强化塑料外壳(含护手带)尺寸199(宽)×338(高) ×60(厚)重量 1.32kg操作键下拉菜单键、选择键、轴操作键、数字/应用键、急停按钮、安全开关显示屏中/英文显示6.5英寸彩色屏幕触摸屏640×480像素采用背照光,使液晶画面更容易看清按钮配备模式转换、伺服准备、启动、暂停、急停四.焊机MOTOMAN-EL350ⅡMOTOWELD-EL350 是数字式逆变控制的多功能自动焊接电源,可以实现CO2气体保护焊、MIG 焊及MAG 焊,适合于普通碳钢、不锈钢及铝材的焊接。
该焊接电源专门为弧焊机器人而设计,有MOTOMAN 机器人的专用通讯控制接口。
引弧成功率高、防粘丝功能强,使焊接生产率大提高。
焊接电源内可以追加始端检出电路板,以协助完成焊接始端检出。
【主要特点】* 可以实现用于脉冲焊接的最佳波形应用焊机内附的数据库,可以针对各种厚度的普碳钢或不锈钢工件来设定焊接电流和电压的波形。