第5章 扩频系统的同步
CDMA扩频通信中的同步实验系统解析
CDMA扩频通信中的同步实验系统第1 章引言1.1CDMA技术发展1.1.1CDMA技术发展现状近年来,蜂窝移动通信系统的发展经历了一个从模拟网到数字网,从频分多址(FDMA)到时分多址(TDMA)和码分多址(CDMA)的过程。
从1992年开始,在美国出现了一种全新的数字蜂窝移动通信系统——CDMA系统。
比较而言,该系统有几大突出优点:一是系统抗干扰能力强;二是系统容量增大等。
上述这些特点使得CDMA蜂窝移动通信系统将在个人通信网( Personal Communication Network——简称PCN)中发挥巨大的作用。
并且正如欧洲电信标准协会(ETSI)、日本无线工业事业联合会(ARIB)、美国电信业联合会(TIA)提交的建议所显示的那样,CDMA技术以其独有的特点和优势己被确认将作为第三代移动通信系统的核心技术,其前景非常广阔。
1.1.2CDMA系统主要特性[1]CDMA系统的主要特性可概括如下:(1)系统容量。
CDMA系统的设计容量远远高于现有的模拟/数字系统。
容量的增大源于采用了一种改进的编码增益/调制方式、话音激活性、三分扇区和同一频率在每个小区以及所有扇区的复用。
(2)业务质量。
CDMA通过在衰落环境下提供强大的运行和软切换功能,从而改善了业务质量。
CDMA利用多经衰落来提高通信和话音质量,通过试用RAKE接收机和其他改进的信号处理技术,每个移动台选择几个最强的多经信号并把它们相干叠加产生一个增强信号。
因此,射频信号的多径衰落在CDMA中反而成了优点,而在窄带系统中衰落则会引起信号质量的严重下降。
通过使用软切换,CDMA消除了用户在小区边界以及在两个小区之间快速的越区切换呼叫时发生的乒乓效应。
乒乓效应会导致切换噪声,增加交换设备的负载,提高发生掉话的概率。
CDMA软切换,即在与目标小区连接的同时保持与目前服务小区的连接,两者运行在同一载频。
这一过程保证了呼叫在小区间的平滑切换,而用户察觉不到这种变化。
直扩系统的同步-
直扩系统的同步
一、直扩系统的同步
• 直扩系统的同步有以下几种: • (1) 伪随机码同步:只有完成这一同步后,才可能使相关 解扩后的有用信号落入中频相关滤波器的通频带内; • (2) 位同步:实际上包括伪随机码的切普同步和码元定时 同步; • (3) 帧同步:提取帧同步后,就可提取帧同步后面的信息 ; • (4) 载波同步:直扩系统采用相关检测,载波同步后,可 为解调器提供同步载波;另一方面,保证解扩后的信号 落入中频频带内;
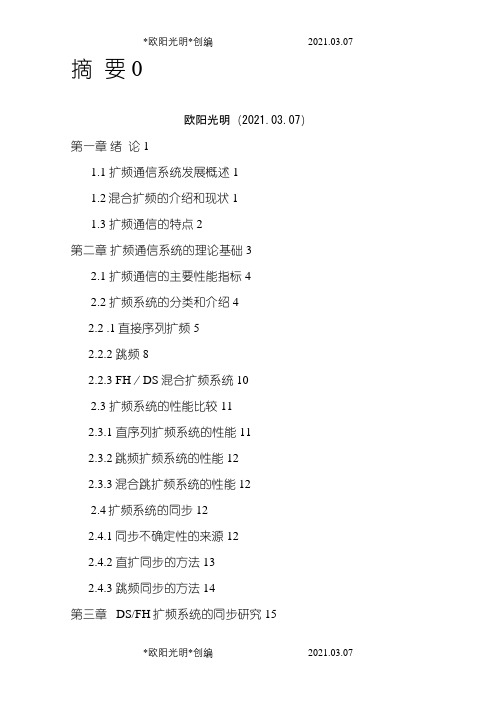
组合码和m序列的自相关特性不一样,m序列在一 个周期内只有一个相关峰值点,而JPL码则有P+1(P 是JPL组合码中子码的数目)个,而且除了一个以外 的所有自相关峰值只(并分别)与组成这个组合码的 各个子码有关,最高的自相关峰值则对应于组合码同 步。 同步过程:先用一个子码与JPL组合码进行滑动 相关搜索,一旦这个子码与嵌在JPL组合码中的对应 子码达到同步,就产生局部相关,可作为第二个子码 的进行滑动相关搜索的开始信号,局部相关峰值累加 ,……依此类推。当全部子码都同步,这个相关就如 同组合码直接被同步一样。
a码
时钟
序列发生器2
N2=2r2-1
b码
+
c码
+
JPL码
a b c码 N1 N 2 N 3
序列发生器P
N3=2r3-1
JPL码的产生方法可 以得到极长的码。这 种码对于在长距离上 进行无模糊的测距是 很有用的,这些长码 是由级数较少的移位 寄存器来实现的
Thank you!
(2)跟踪(精同步) 目的:在初始同步的基础上,使码相位的误差进一步 减小,保证本地码的相位,在一规定的允许范围内变 化。
过程:自动调节相位。
直扩系统的跟踪与一般的数字通信系统的跟踪类似, 故关键在于捕获。
[2017年整理]扩频通信课后习题解答
![[2017年整理]扩频通信课后习题解答](https://img.taocdn.com/s3/m/e73a30695bcfa1c7aa00b52acfc789eb172d9eda.png)
课后习题参考答案第一章1-1、在高斯白噪声干扰的信道中,信号传输带宽为16KHz ,信噪比为4,求信道的容量C 。
在此信道容量不变的条件下,分别将信号带宽增加1倍和减小一半,分别求此两种情况系统的信噪比和信号功率的变化值。
解:22log (1)16000log (14)37.156/SC B bit s N=+=+= (1)信道容量不变,带宽增加1倍 信噪比:/221 1.23C B SN=-= 信号功率:/2002(21)39.36C B S BN N kw =-= (2)信道容量不变,带宽减小一半信噪比:2/2124.01C B SN=-= 信号功率:2/00(21)192.0892C BB S N N kw =-=1-4、某一高斯白色噪声干扰信道,信道带宽为8kHz ,试求在系统信噪比为25dB 条件下允许的最大信息传输速率。
解:s kbit NSB C /475.66)101(log 8000)1(log 5.222=+=+=1-5、某系统的扩频处理增益p G 为40dB ,系统内部损耗S L =2dB ,为保证系统正常工作,相关解码器的输出信噪比dB N S out 10)/(≥,则系统的干扰容限为多少? 解:dB N S L G M out S p j 28]102[40])/([=+-=+-=1-6、某系统在干扰信号的有用信号功率250倍的环境下工作,解码器信号输出信噪比为12dB ,系统内部损耗为3dB ,则系统的扩频处理增益至少应为多少? 解:()10lg 25031238.98j s SG M L dB N=++=++=1-8、某直接序列扩频系统的伪随机码速率为5Mbit/s ,信号速率为8kbit/s ,信号的扩频带宽和处理增益各为多少?解:扩频带宽:22*510c B R MHz ===处理增益:6310*1010lg 10lg 30.978*10i B G dB R ===1-9、试说明扩频通信系统与传统调制方式通信系统的主要差别。
扩频系统ppt课件

PART
05
总结词
军事通信中,扩频系统因其抗干扰能力强、保密性好等特点被广泛应用。
详细描述
在军事通信领域,扩频系统通过将信息扩展到更宽的频带中进行传输,能够有效地抵抗敌方干扰和窃听,保证通信的可靠性和安全性。
无线局域网中,扩频系统提供了高速、稳定的无线传输,提高了网络性能。
扩频系统的实现需要高速的信号处理技术和复杂的编码算法,增加了系统的复杂性和成本。
实现复杂度较高
扩频系统需要精确的同步才能正常工作,对时钟和频率的稳定性要求较高。
对同步要求高
相对于常规通信系统,扩频系统的带宽效率较低,需要更多的带宽资源。
带宽效率较低
1
2
3
未来将进一步研究高性能的扩频芯片和信号处理算法,以提高系统的性能和降低成本。
扩频码的选择
信道编码技术
多用户接入技术
抗干扰能力定义:扩频系统的抗干扰能力是指系统在存在干扰的情况下仍能保持正常通信的能力。它是衡量扩频系统性能的重要指标之一。
信号处理算法
信号处理算法可以提高系统的抗噪声性能,从而降低误码率。常用的信号处理算法包括匹配滤波器和最大似然估计等。
误码率定义
误码率是指系统在传输性能的重要指标之一。
扩频系统具有抗干扰能力强、保密性好、抗多径干扰能力强、抗衰落性好等优点,因此在军事通信、卫星通信、无线通信等领域得到广泛应用。
特点
定义
卫星通信
卫星通信由于受到大气层和太空环境的干扰,信号传输容易受到干扰和衰落,而扩频技术可以有效提高卫星通信的可靠性和稳定性。
军事通信
扩频技术广泛应用于军事通信领域,可以提高通信的保密性和抗干扰能力,确保军事信息的传输安全。
《扩频码同步》课件

二、扩频码同步的原理
1 扩ห้องสมุดไป่ตู้码的生成方式
2 扩频码同步的意义
探讨扩频码的生成方式, 如正交码、伪随机码等, 并解释其在同步中的影响。
阐述扩频码同步对通信系 统性能的影响,以及同步 技术在消除码间干扰中的 作用。
3 扩频码同步的方法
介绍常用的扩频码同步方 法,如非线性同步方法、 协作同步方法等,并对比 其优缺点。
《扩频码同步》PPT课件
这份PPT课件将详细介绍扩频码同步技术的原理、难点、实现流程、应用及前 景发展等方面,为您呈现全面的扩频码同步知识。
一、引言
扩频通信的概念
解释扩频通信的基本概念和意义,探讨其在现代通信领域中的重要性。
扩频码的作用
介绍扩频码在通信中的作用,以及为什么同步是扩频通信中的关键问题。
展望扩频码同步技术的未来发 展趋势,以及对通信行业的影 响和意义。
动态调整扩频率的方 向
探讨扩频码同步技术中动态调 整扩频率的发展方向,以满足 不同应用场景的需求。
前景及未来发展趋势
总结扩频码同步技术的前景, 以及未来发展中需要关注的重 点和挑战。
七、参考文献
**注:本PPT课件介绍了扩频码同步技术的原理、难点、实现流程、应用及前 景发展等方面,是一份全面的扩频码同步介绍材料。**
解调器的设计及实现
讨论解调器在扩频码同步中的作用,以及解调器设 计中需要考虑的因素。
五、扩频码同步的技术应用
1 军事应用
探索扩频码同步技术在军事通信中的应用, 如抗干扰、保密通信等方面。
2 通信应用
介绍扩频码同步在商业通信中的应用,如移 动通信、物联网等领域的发展。
六、结论
扩频码同步技术的发 展前景
毕业设计87扩频通信系统干扰及其仿真技术设计
目录第1章引言 (2)第2章直接序列扩频系统的组成 (3)第3章数字信号的频带传输 (4)3.1 数字相位调制 (4)3.2 2PSK信号的解调 (4)第4章直扩系统的性能分析 (6)4.1 扩频系统的抗干扰性能 (6)4.2 扩频系统的同步 (7)第5章程序仿真 (9)5.1 直接序列扩频通信系统仿真 (9)5.2 加入噪声后的直扩系统仿真 (13)第6章直扩系统干扰效果评估 (22)6.1 理论分析 (22)6.2 Matlab仿真 (24)结论 (26)参考文献 (26)扩频通信系统干扰及其仿真技术第 1 章引言扩频通信,即扩展频谱通信(Spread Spectrum Communication),它与光纤通信、卫星通信,一同被誉为进入信息时代的三大高技术通信传输方式。
扩频通信技术自50 年代中期美国军方便开始研究,一直为军事通信所独占,广泛应用于军事通信、电子对抗以及导航、测量等各个领域。
直到80年代初才被应用于民用通信领域。
为了满足日益增长的民用通信容量的需求和有效地利用频谱资源,各国都纷纷提出在数字峰窝移动通信、卫星移动通信和未来的个人通信中采用扩频技术,扩频技术现已广泛应用于蜂窝电话、无绳电话、微波通信、无线数据通信、遥测、监控、报警等系统中。
第 2 章直接序列扩频系统的组成直接序列扩频系统(DS,Direct Sequence)又称为直接序列调制系统或伪噪声系统(PN 系统),简称为直扩系统,是目前应用较为广泛的一种扩展频谱系统。
人们对直扩系统的研究最早,如美军的国防卫星通信系统(AN-VSC-28)、全球定位系统(GPS)、航天飞机通信用的跟踪和数据中继卫星系统(TDRSS)等都是直扩技术应用的实例。
直扩系统是将要发送的信息用伪随机(PN)序列扩展到一个很宽的频带上去,在接收端,用与发送端扩展用的相同的伪随机序列对接收到的扩频信号进行相关处理,恢复出原来的信息。
干扰信号由于与伪随机序列不相关,在接收端被扩展,使落入信号频带内的干扰信号功率大大降低,从而提高了系统的输出信噪(干)比,达到抗干扰的目的。
扩频通信技术课件
虚警惩罚时间
假如某次积分处理出现虚警,则相位搜索控制电路不改变 本地码相位,再作一次积分处理来证实是否发生虚警。若此次 积分处理不发生虚警,即证实了前次积分处理是一次虚警,则
下次的积分处理将使相位改变Tc/2 ,接着重新开始搜索。两 次积分处理,本地参考扩频码的相位仅改变了Tc/2 ,出现虚
13
若已知扩频码相位所在位置的先验概率P(k) ,首先应当
搜索那些最可能的扩频码相
位单元,而后搜索次可能的
相位单元。
No
例如:假设扩频码相位服从
高斯分布,较合理的搜索方 法是先搜索以最可能的相位 位置为中心的一个标准偏差
Image
范围内的单元。如没有搜到,
扩大到两个标准偏差范围,
依此类推。
图6-4 高斯分布时搜索区域的确定示意图
(6-3)
分析
➢ 扩频码序列相位搜索捕获法的平均同步捕获时间至少是相
关积分时间TD的N倍。
➢ 当扩频码周期N较小时,虚警对平均捕获时间的影响比较 显著;
➢当N较大时,比如N >100 ,只有在Pfa>0.8 时,虚警对平
均捕获时间的影响才显著地表现出来。通常N的取值都比 较大,而虚警概率也不可能接近1,所以工程估算时,可 认为虚警概率为零,则有
(2)同步跟踪(Tracking,精同步):扩频接收机实现扩频
码同步捕获后,本地参考扩频码必须尽可能精确地跟踪接收
信号的变化,使本地参考扩频码相位与接收扩频码相位的差
别尽可能的小,以期在相关器获得最大相关输出。
1
6.1 扩频码的同步
图6-1 扩频通信系统原理框图
扩频通信技术
2
6.1.1 发射参考信号法
精品文档-扩频通信技术及应用(第二版)(暴宇)-第5章

第5章 扩频通信的扩频码同步 图5-3 发射参考信号的同步方法
第5章 扩频通信的扩频码同步
发送端把含有信息的已调信号与不含信息的fc1同伪随机 码进行调制后, 合并、 放大, 然后发送出去。 在接收端,
两个频率的信号分别在两个通道中放大, 经过相关运算后,
取出中频, 解调后还原出信息。 设发送的两个信号分别为
5.1 同步不确定性的来源 1. 频率源的漂移 对数字通信而言,最严重的还是码相位的偏移, 使系统 性能下降。 对于码发生器, 当时钟速率偏移10 Hz时, 将 变成10 bit/s的累积码元偏差, 一小时后就会引起相位偏 差36 000 bit, 这样会造成系统不能正常工作。 图5-1说明 了各种相对码速率偏移对系统的积累偏移的影响。
第5章 扩频通信的扩频码同步 图5-4 典型的JPL码发生器
多普勒频移的大小为
第5章 扩频通信的扩频码同步
f f Hz c
(5-1)
式中: v为发射机与接收机的相对位移速度; f为发射频 率; c为电磁波的传播速度, 值为3×108 m/s。
第5章 扩频通信的扩频码同步
当频率高时, 多普勒频移是一个很重要的参数, 如 f=1 GHz时, 相对运动速度v=100 km/h=27.8 m/s, 则多 普勒频移Δf=92.7 Hz。 接收机频率f收为
第5章 扩频通信的扩频码同步
组合码和m序列的自相关特性不一样, m序列在一个周期 内只有一个相关峰值点, 而JPL码则有P+1(P是JPL组合码中 子码的数目)个, 而且除了一个以外的所有自相关峰值只(并 分别)与组成这个组合码的各个子码有关, 最高的自相关峰值 对应于整个组合码同步。
第5章 扩频通信的扩频码同步 用JPL组合码来同步是先用一个子码与组合码进行滑动相 关搜索, 一旦这个子码与嵌在组合码中的其他对应子码达到 同步, 就产生局部相关。 这个局部相关就成为进行第二个子 码进行滑动相关搜索的开始信号, 第二个子码的局部相关峰 值增加……这个过程一直继续到组成组合码的全部子码都各自 与接收信号中的对应部分同步为止。 当全部子码都各自同步 时, 这个相关就像组合码直接被同步一样。
扩频-第5章(4)
特征相位时,序列每隔一位抽样与原序列一样。
1110100111010011101 111 010 0111
1110100111
Gold序列
• 设序列 ai 的特征多项式 fa (x) 是一个r级线性移位寄存器
产生m序列的本原多项式。 • 特征相位多项式
• Gold码周期为 N 2r 1
• 结构简单,易于实现
Gold序列
Gold序列
平衡Gold序列ቤተ መጻሕፍቲ ባይዱ
• 平衡码:序列中1和0之差为1。 • 非平衡码:0和1差多于。 • 表5-11,5-12 • 平衡性对载波抑制度影响很大。因此在DS系统中选用平衡
Gold码族。表5-13
Gold序列
平衡码产生方法
剩下的r次不可约多项式中,根据定义用试探的方法得到。 (目前采用可计算机编程实现)
目前设计可以查阅相关工具书获得。
5.7.2 m序列的性质
• 例12: • r=5,N 2r 1 31 ,三个本原多项式分别为45、75和67
。
• 其中八进制数45用二进制数表示为100101,对应的本原多 项式为 f1(x) x5 x2 1 ,其逻辑图见下图a。
M序列
• 最长非线性移位寄存器序列,有r级非线性移位寄存器产生的码
长为 2r 的周期序列。(也称全长序列)
• M序列可以在m序列的基础上实现。在m序列上插入一个全0状态就 可以得到M序列。
• M序列的生成多项式
F(x1,x2...xr1) x1x2...xr1 F0 (x1,x2...xr )
f2 (x)
x5
f1
1 x
扩频通信第5章扩频信号的解扩与解调
设计良好的相关器(例如乘积检波器),可以允许在输入信 噪比低达 -50 ~ -20dB的条件下,从强干扰噪声中检测出微弱 信号。因此大多数扩频信号的解扩都使用相关检测器,也有 一些简单的扩频通信系统使用非相关检测器。
2
引言
➢ 扩频信号解调需要两步来完成 (1)对扩频信号进行解扩/跳; (2)对解扩/跳后的载有信息的信号进行解调。
上述结果对 1 都能成立。注意到伪随机码的自相关特性,在 时, 合1 成信号的功率谱密度函数退化为伪随机码的功率谱密度
函数,在 =0时,合成信号的功率谱全部都成为直流分量。
20
5.2.1 码元同步偏移对相关器输出的影响
➢ 码元同步偏移的影响分析
令
N ( f
)
2
N 12
N
sin(πf Tc πf Tc
若两个电信号具有相同振荡频率,相同电矢量振动方向,且有固 定的相位差,则这两个信号就是相干的。即使是相干信号,它 的某些参数也可能是随机的。
在实际振荡器中,无论相位如何稳定,都会有随机成分。只要
随机成分占的比例很小,可以忽略,或影响可分析和控制,那
么工程上仍可认为是相干信号或部分相干信号。
4
5.1.1 相干通信的基本概念
由于输出叉指电极对之间的间隔对声表面波的传输延迟正好等于一个码元宽度t所以输出脉冲是彼此相连接的并且各脉冲的相位载波f的相位取决于相应的叉指电极的极性即取决于电极连接到汇流条的方式最后的输出可以看成是与输入伪随机码每一码元相对应的叉指电极对输出的叠加图529所示输出端叉指电极的极性等效的码元为32位长的m序列1100110相关信号振幅输出如图530所示
➢ 目标
有必要研究码元同步状态发生偏移对相关器输出的影响。
扩频通信中直接扩频系统的同步技术

摘要扩频通信作为一种新型的通信体制,具有很多独特的优点,在军用和民用领域中都得到了广泛的应用。
扩频通信中一个关键性的问题就是扩频信号的同步,包括捕获和跟踪两个步骤,同步性能的优劣直接影响到整个扩频通信系统的性能。
因此,对直扩系统同步的研究具有很大的实用价值。
本文深入研究了扩频通信中直接扩频系统的同步技术,包括伪随机(PN)序列的捕获、跟踪和载波同步。
在伪随机(PN)序列的捕获中研究了串并结合的大步进方法。
研究了伪码串行-载波并行、伪码并行-载波串行、伪码串行-载波并行、伪码并行-载波并行4种捕获方法。
在特定的参数下,设计出直扩通信系统,并在高斯信道条件下,仿真得出了直扩系统的误码率性能曲线,在此基础上运用了伪码并行-载波串行的方法进行仿真分析,从MATLAB仿真结果可以看出捕获方案确实可行。
关键词:扩频通信;同步;捕获;跟踪AbstractAs a new type of communications system,spread spectrum communications has many unique advantages, and has been widely used in both military and civilian fields. The synchronization of spread specturn signal, including acquisition and tracking, is the key problem of spread specturn communication. The performance of synchronizing has direct impact on the whole spread spectrun communication system. As a result, it’s very important to discuss this problem.This paper researches into synchronization techniques of direct-sequence spread spectrum systems, which include PN code acquisition, PN code tracking and carrier recovery. we studied PN acquisition scheme, large step acquision scheme. This paper discusses four capture methods about serial PN code, serial carrier, parallel PN code, serial carrier, serial PN code, parallel carrier, and parallel PN code, parallel carrier. Incertain parameters, design of direct sequence spread spectrum communication system, and in the Gauss channel conditions, simulation of the curve of the BER performance of DSSS system, on the basis of using the parallel PN code, carrier serial simulation, simulation results can be seen from the MATLAB capture scheme is feasible.Keywords: S pread Spectrum Communications; Synchronization; Acquisition; Tracking目录1 绪论 (1)2直接序列扩频通信的理论基础 (4)2.1扩频通信的理论基础 (4)2.1.1基本理论 (4)2.1.2扩频通信的特点 (5)2.2直接序列扩频通信系统 (6)2.3伪随机序列 (9)2.3.1m序列 (10)3 直接序列扩频系统的同步 (12)3.1同步机理 (12)3.2信号捕获 (12)3.3 信号跟踪 (17)3.3.1 载波跟踪技术 (17)3.3.2 锁相环原理 (18)3.3.3 锁频环原理 (20)3.3.4 锁相环与锁频环的性能比较 (21)4直扩系统的仿真分析 (23)4.1设计参数 (23)4.2 直扩通信系统的原理框图 (23)4.3直扩通信系统的仿真分析 (24)4.4 直扩系统的抗干扰性能分析 (30)5 同步仿真分析 (31)5.1同步参数设计 (31)5.2 PN码的自相关性仿真 (31)5.3 捕获 (32)5.4 跟踪 (36)结论 (39)致谢 (40)参考文献 (41)附录A 英文原文 (43)附录B 中文翻译 (55)附录C 程序 (64)1 绪 论扩频通信是建立在ClaudeE.Shannon 信息论基础之上的一种新型现代通信体制。
混合扩频系统的同步研究之欧阳光明创编
摘要0欧阳光明(2021.03.07)第一章绪论11.1 扩频通信系统发展概述11.2混合扩频的介绍和现状11.3 扩频通信的特点2第二章扩频通信系统的理论基础32.1 扩频通信的主要性能指标42.2 扩频系统的分类和介绍42.2 .1直接序列扩频52.2.2 跳频82.2.3 FH/DS混合扩频系统102.3 扩频系统的性能比较112.3.1 直序列扩频系统的性能112.3.2跳频扩频系统的性能122.3.3混合跳扩频系统的性能122.4扩频系统的同步122.4.1同步不确定性的来源122.4.2 直扩同步的方法132.4.3 跳频同步的方法14第三章 DS/FH扩频系统的同步研究153.1 基于PMF-FFT的直扩同步163.1.1 PMF-FFT 的结构163.1.2 捕获性能分析173.2 基于部分监测的跳频同步183.2.1 跳频同步方法183.2.2 同步性能分析193.3 DS/FH 混合扩频同步方案243.4 本章小结25第四章结束语26摘要现有扩频体制系统一般采用直接序列扩频(DS)体制,但随着电子对抗技术的发展和对系统性能要求的提高,直接序列扩频(DS)体制日益不能满足人们的要求。
直接序列扩频系统具有扩频增益受限、远近效应严重、抗窄带干扰和对准式干扰能力差等缺点,在实战背景下很容易受到敌方的干扰。
为此,在现有体制的基础上,进一步提高抗干扰、抗截获和抗摧毁能力,采用性能更强的混合扩频(FH/DS)体制已经成为一种趋势。
直接序列扩频/跳频(DS/FH)混合扩频是一种抗干扰性能极强的扩频通信体制,在现代军事通信和电子对抗中有着非常重要的意义。
本文主要研究了DS/FH 混合扩频系统的同步技术和一种适合高速DS/FH 系统的快速同步方法。
论文首先介绍了扩展频谱技术理论基础,阐述了直接序列扩频系统、跳频扩频系统和FH/DS 混合扩频系统的原理和数学模型,并对三种系统的优缺点进行对比,论证了混合扩频系统相比单一的直扩系统或跳频系统在“三抗”效能方面的优势。
扩频通信的同步于跟踪

用一组特殊的码字来代表同步信息,然后把这个码 字周期性的插入编码数字信息序列里。收方根据同步 码字的特点进行识别,就得到了码字同步的信息。
实现同步的几种方法(2)
自同步法
将发送端跳频信号中隐含的同步信息设法提取 出来 ,控制接收跳频器 ,以实现跳频同步;不用专 门的频带,也不占据专门的时隙,不需要专门的 同步信号功率。即在节省频率资源和信号功率方 面及抗干扰能力上 ,优于前两种方法 ,因而应用较 为普遍。
同步不确定性的来源(2)
码相位的不确定性(时间不定区)包含: 从发射点到接收点电波传播的时延及多径传播 ☺ 收发双方启动码序列的时间差 ☺ 收发双方时钟的不稳定性
载波频率的不确定性(频率不定区)包含: ☻ 收发双方基准频率源的不稳定性 ☻ 多普勒频偏
同步过程(1)
在数字通信系统中同步包含的内容是:码时 钟速率同步即码位同步(或码元同步)、码字 同步及载波同步。
快速扫描式自同步方法
这种同步方案的接收频率合成器有两种工作状态 , 一种是跳频工作状态 ,在PN码作用下 ,按跳频图案输 出本地跳频信号 ;另一种是扫描工作状态 ,这时频率 合成器置于某一频组上 ,扫描输出M个频率 。一个 频组的持续时间等于一个chip占用的时间T ,每一 扫描子频隙的时间为T/M ,显然这种状态时频率合 成器的频率转换速率提高了M倍 ,所以称快速扫描 。 为使捕获概率大 ,每个频组的M个频率是从接收跳频 图案中的N个频率点上等间隔抽取的。
signature code acquisition in CDMA mobile packet communication . IEEE Trans. V. T,1998,47(1 ) :196~ 208 [4] 刘杰 ,续大我 ,费铸增等 快速哈达马变换在 SCDMA- FWA系 统中的应用 .北京 :北京邮电大学学报1998,21 (5) [5] 李道本著 信号的统计检测与估计理论 .北京 :北京邮电大学出 版社 ,1996
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5章
扩频系统的同步
式中c(t)和a(t)分别为伪随机码和传送的信息。 在接 收端, r1(t)和r2(t)分别对应于s1(t)和s2(t )。 不考虑衰减问 题, r1(t)和r2(t)相乘后得 r(t)=r1(t)r2(t) =a(t)c2(t) cosωc1t·cosωc2t =a(t) cosωc1t·cosωc2t 经中频滤波后, 为 (5 - 5)
第5章
扩频系统的同步
6. 突发同步 突发同步法是指发射机在发送信息之前, 首先发射 一个短促的高速脉冲 , 供给接收机以足够的信息 , 以便 使接收机建立同步。 在突发同步期间, 除了码字以及载 波同步之外 , 不发送信息 , 突发同步后被发送的信息跟 着转换到直扩信号的发射上。 这种方式也可用于跳频 系统。
第5章
扩频系统的同步
为了减小噪声 , 提高检测概率 , 相关后的带宽 ( 包括 带通和积分器)要窄; 从缩短捕获时间来看, 应加快滑动 速度, 即加大收发时钟频率差, 又要求带宽要宽, 这两者 是矛盾的。 当滑动快时, 相关器输出的相关脉冲窄, 窄 的脉冲将不易通过后面的低通滤波器 ; 当滑动慢时 , 相 关器输出的脉冲宽, 有利于通过低通滤波器。 图5 - 9给 出了两种情况下相关器的输出 , 对应滑动的两个切普 (并不是指伪随机码的两个切普宽度2Tc, 相对滑动后切 普宽度随相对滑动速率改变)。 为了使相关器输出的相 关峰值通过低通滤波器, 相对滑动速度受到低通滤波器 上升时间或带宽的限制。
1 1 r(t ) a (t ) cos( c1 c 2 )t a (t ) cos c1t 2 2
(5 - 6)
第5章
扩频系统的同步
5. 发射公共时钟基准法 发射公共时钟基准法是以某个高精度的时间作为基 准, 向其他用户提供标准时钟, 各用户定期地和基准时钟 核对, 这样就可大大减少各用户之间的时间的不确定性。
第5章
扩频系统的同步
7. 用特殊码建立同步 在一些系统中, 采用特殊码来完成同步捕获, 对扩频 系统的迅速锁定很有好处。 在测距系统中, 要求同步建 立时间短, 就采用了一种JPL组合码, 它由几个短码组成。
第5章
扩频系统的同步
序列发生器Ⅰ a 码 (2m-1)bit 时钟 序列发生器Ⅱ b 码 (2n-1)bit 序列发生器Ⅲ c码 (2r-1)bit 输出JPL码 a b c
第5章
扩频系统的同步
5.4 直扩同步的跟踪
5.4.1 延迟锁定环 延迟锁定环又叫早 - 迟码跟踪环 , 图 5 - 12 是延迟锁定 环的原理图。 输入的中频信号是受伪随机码调制的信号 (也可以同时受到信息调制), 本地伪随机码发生器(也就是 捕获时的码发生器的相位与输入码相位的差在一个伪随机 码切普宽度Tc内)的时钟现由VCO控制, 其时钟频率与发端 码时钟频率相等。 相关网络由两路相关器组成, 两路相关 器输入的本地伪随机码的相位差为Δ, 分别从码发生器的 第r级和第r-1级输出, 这里Δ=Tc。
第5章
扩频系统的同步
3. 多卜勒频移 在发射机和接收机中使用精确的频率源, 可以去掉 大部分码速率、 相位和载频的不确定性,但不能完全克 服由于多卜勒频移引起的载波和码速率的偏移。 随着 移动式发射机/接收机的每一次相对位置的改变,就会 引起码相位的变化。 加到接收信号上的多卜勒频率不 确定的大小是接收机和发射机相对速率及发射频率的 函数。
第5章
扩频系统的同步
5.2.2 初始同步方法 接收机刚开始工作时 , 对所接收的信号的频率和相 位只能大致确定一个范围, 这个范围主要根据发射机和 接收机的频率与时钟的相对差值、 信道传输的频率不 稳定性、 传播时延以及收发信机本身信号源与时钟的 稳定度来确定。
第5章
扩频系统的同步
1. 滑动相关法 接收机在搜索同步的过程中, 本地码序列发生器以不 同于发射端的码速率工作, 这就相当于两码彼此“滑动”。 2. 同步头法 同步头法的实质是在滑动相关器中 , 使用一种特殊的 码序列, 这种码序列较短, 短得足以使滑动相关器在合理的 时间内通过各种可能的码状态, 完成起始同步的搜索。 这 种专门用来建立起始同步的码, 称为“同步头”。
n r (2m-1)(2 -1)(2 -1) bit
图 5 - 4 典型的JPL码发生器
第5章
扩频系统的同步
8. 匹配滤波器同步法 这里的匹配滤波器同步与一般的匹配滤波器 —— 积 分、 清洗检测器不是同一类, 尽管两者都是匹配滤波器。 由最佳接收理论知, 若接收信号为s(t), 则匹配滤波器的 冲激响应h(t)为 h(t)=s(T-t) 式中T为信号s(t)的持续时间。 (5 - 7)
第5章
扩频系统的同步
混 频
相关器
包络检波
积分清洗
门限判决
本 振
本地码
时 钟
逻辑电路
图 5 - 6 滑动相关同步原理框图
第5章
扩频系统的同步
放慢时钟
接收 机锁定 否
是
停止搜索
进入跟踪状态
失步
继续搜索
跟 踪
图 5 - 7 滑动相关同步流程图
第5章
扩频系统的同步
R( ) 1 判决门限 - Tc Tc
第5章
扩频系统的同步
第5章 扩频系统的同步
5.1 同步不确定性的来源 5.2 直扩系统的同步 5.3 滑动相关检测 5.4 直扩同步的跟踪 5.5 跳频系统的同步 5.6 跳频系统的扫瞄驻留同步法 思考与练习题
第5章
扩频系统的同步
5.1 同步不确定性的来源
1. 频率源的漂移 一般通信系统中所用的频率并不像我们希望的那 样稳定, 它们对频率不确定的影响是不能忽略的。 在扩 频系统中, 频率不确定性的其它结果也是显而易见的。 频率源频率的漂移 , 将引起码元时钟速率的偏移 , 积累 为码相位的偏移 ; 频率源频率的漂移 , 还会引起载波频 率的漂移, 使系统性能下降。图5 - 1说明了各种相对码 速率偏移对系统的积累偏移的影响。
第5章
扩频系统的同步
fc 1 不含信息
调制器 PN码 发生器
s1(t )
fc 1
高放
r1(t ) fIF= fc 1- fc 2
分路
r(t )
中放
fc 2 含信息
调制器
s2(t )
fc 2
高放
r2(t )
图 5 - 3 发射参考信号的同步方法
第5章
扩频系统的同步
发送端把含有信息的已调信号与不含信息的fc1同伪 随机码进行调制后, 合并、 放大, 然后发送出去。 在接 收端 , 两个频率的信号分别在两个通道中放大 , 经过相 关运算后, 取出中频, 解调后还原出信息。 设发送的两 个信号分别为s1(t)和s2(t), 即 s1(t)=c(t) cosωc1t 和 s2(t)=a(t)c(t) cosωc2t (5 - 4) (5 - 3)
第5章
扩频系统的同步
T1 T2 输入信号
T3 T4
T5
T6 T7
输出
图 5 - 5 基带数字匹配滤波器
第5章
扩频系统的同步
5.3 滑动相关检测
5.3.1 滑动相关同步器 滑动相关检测是一种最简单、 最实用的捕获方法, 图5 - 6为滑动相关同步的原理框图。 采用与发端频率 有差别的时钟来驱动本地码(码型已知), 由于时钟差, 引 起接收信号与本地产生的伪随机码的相对滑动。图 5 7为滑动相关的流程图。
第5章
扩频系统的同步
106 105 104 103 102 每天积累漂移的比特数 10 1 10-6
100 Mb/s 10 Mb/s 1 Mb/s
10-7
10-8 10-9 10-10 相对速率偏移
10-11
图 5 - 1 不同码速时相对速率偏移每日积累偏移
第5章
扩频系统的同步
2. 电波传播的时延 同步不确定的主要来源是那些与时间和频率有关 的因素。 如果接收机能够精确地知道通信距离和发射 时间 , 发射机和接收机都具有足够准确的频率源 , 它们 就能得到所需的定时 , 就没有同步问题了 , 但这些假设 本身就只是一种假设。
第5章
扩频系统的同步
3. 跳频同步法 跳频系统使用的伪随机码速率要比直扩系统使用 的伪随机码速率低得多, 因而同步建立时间也就短得多。 由于使用的码速低 , 为达到给定的时钟误差 , 积累就慢 得多。
第5章
扩频系统的同步
4. 发射参考信号法 当接收系统必须尽可能简单时, 发射参考信号可以 用于起始同步捕获、 跟踪或同时用于两者。 发射参考 信号法的接收机既不用伪随机码发生器, 也不用其它的 本地参考振荡器, 相应的伪随机码参考信号也是发射机 产生的, 并同所要的载有信息的信号同时发送。 跳频和 直扩两种系统都适合发射参考信号法。 图 5 - 3 为该系 统的原理框图。
第5章
扩频系搜 索
捕 获 否
是
停止搜索
是
失 步 否
同步锁定
跟 踪
转入跟踪
图 5 - 2 同步流程图
第5章
扩频系统的同步
5.2.1 同步过程 一般同步系统的同步过程可用图 5 - 2 来描述。 接 收机对接收到的信号 , 首先进行搜索 , 对收到的信号与 本地码相位差的大小进行判断 , 若不满足捕获要求 , 即 收发相位差大于一个码元, 则调整时钟再进行搜索。直 到使收发相位差小于一个码元时 , 停止搜索 , 转入跟踪 状态。
第5章
扩频系统的同步
相关输出
相关输出
o (a)
o (b)
图 5 - 9 滑动相关器输出波形 (a) 滑动快; (b) 滑动慢
第5章
扩频系统的同步
设Rc和 R′c分别为发端和收端伪随机码的速率 , BW 为相关器后的低通滤波器的带宽, 则低通滤器的阶跃响 应的上升时间为 0.35/BW 。 每秒钟相对滑动的切普速 率为R′c-Rc,则滑过两切普的时间为2/(R′c-Rc), 要使相 关峰值通过低通滤波器, 则要求滑过两切普的时间大于 低滤波器的上升时间, 因此有