BALLUFF BTL5系列位移传感器操作手册
德国BALLUFF巴鲁夫位移传感器工作原理巴鲁夫位移传感器具有无

德国BALLUFF巴鲁夫位移传感器工作原理巴鲁夫位移传感器具有无滑动触点,工作时不受灰尘等非金属因素的影响,并且低功耗,长寿命,可使用在各种恶劣条件下。
位移传感器主要应用在自动化装备生产线对模拟量的智能控制。
位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。
小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。
其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用。
巴鲁夫位移传感器的功能在于把直线机械位移量转换成电信号。
为了达到这一效果,通常将可变电阻滑轨定置在传感器的固定部位,通过滑片在滑轨上的位移来测量不同的阻值。
传感器滑轨连接稳态直流电压,允许流过微安培的小电流,滑片和始端之间的电压,与滑片移动的长度成正比。
将传感器用作分压器可最大限度降低对滑轨总阻值精确性的要求,因为由温度变化引起的阻值变化不会影响到测量结果。
德国BALLUFF巴鲁夫位移传感器工作原理产品优势:高分辨率、高重复性和高线性抗震动、抗干扰场探测液压驱动装置 (如风力发电设备) 的活塞位置监测注塑机或加工中心内的线性运动监控配料及混合单元内的料位德国BALLUFF巴鲁夫位移传感器部分产品型号:BTL0E1E BTL5-S171B-M0200-P-S32BTL0E30 BTL5-S172B-M1000-P-S32BTL0EM1 BTL5-S177B-M0225-P-KA05BTL0EWY BTL5-S112B-M0500-P-S32BTL0H8Y BTL5-S112B-M0300-P-S32BTL0HA1 BTL5-S112B-M1125-P-S32BTL0HA3 BTL5-S112B-M1535-P-S32BTL0HA4 BTL5-S112B-M1625-P-S32BTL0J0Y BTL5-S162-M4500-P-SA303-S32BTL0JR6 BTL5-S186-M2150-P-S32BTL0K2Z BTL5-S113B-M0250-P-S32BTL0L78 BTL5-S101B-M0300-P-S32BTL0LWK BTL5-S171B-M1500-P-SA244-S32BTL0M5C BTL5-S171B-M2000-P-S32德国BALLUFF巴鲁夫位移传感器工作原理BTL0N5E BTL5-S163-M2250-P-S32BTL0NPM BTL5-S113B-M2300-P-S32BTL0NRC BTL5-S101-M0600-P-SA243-S32BTL0P0L BTL5-S171B-M0900-P-KA15BTL0P10 BTL5-S111B-M0500-P-KA05SET00AA BTL5-S114-M0600-P-S32/KRUPP KAUTEX BTL00KJ BTL5-T110-M0450-P-S103BTL00NZ BTL5-T110-M0900-P-S103BTL00TL BTL5-T110-M0050-P-S103BTL00ZZ BTL5-T110-M0750-P-S103BTL0100 BTL5-T110-M1750-P-S103BTL0100 BTL5-T110-M1750-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL0137 BTL5-T110-M1000-P-S103BTL01N4 BTL5-T110-M0550-P-S103BTL01N8 BTL5-T110-M0175-P-S103BTL01RU BTL5-T110-M0400-P-S103BTL0284 BTL5-T110-M0100-P-S103BTL028J BTL5-T120-M1000-P-S103BTL02C4 BTL5-T110-M0130-P-S103BTL03A3 BTL5-T110-M0350-P-S103BTL03H0 BTL5-T110-M0150-P-S103BTL03H2 BTL5-T110-M0200-P-S103BTL03H3 BTL5-T110-M0225-P-S103BTL03H5 BTL5-T110-M0250-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03H9 BTL5-T110-M0300-P-S103BTL03HA BTL5-T110-M0300-P-SA268-S103BTL03HF BTL5-T110-M0400-P-SA160-S103BTL03HJ BTL5-T110-M0500-P-S103BTL03HM BTL5-T110-M0600-P-S103BTL03HP BTL5-T110-M0650-P-S103BTL03HT BTL5-T110-M0700-P-S103BTL03HW BTL5-T110-M0800-P-S103BTL03HZ BTL5-T110-M1400-P-S103BTL03J0 BTL5-T110-M1600-P-S103BTL03J1 BTL5-T110-M2000-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03J1 BTL5-T110-M2000-P-S103BTL03J2 BTL5-T110-M2050-P-S103BTL03J3 BTL5-T110-M2100-P-S103BTL03J4 BTL5-T110-M2150-P-S103BTL03J4 BTL5-T110-M2150-P-S103BTL03J5 BTL5-T110-M2200-P-S103BTL03J7 BTL5-T110-M3100-P-S103BTL03J9 BTL5-T120-M0700-P-S103BTL03JC BTL5-T120-M1750-P-S103BTL03JF BTL5-T120-M2000-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03JH BTL5-T120-M2250-P-S103BTL08R2 BTL5-T110-M1250-P-S103BTL09AL BTL5-T120-M4250-P-SA303-S103 BTL0JJ6 BTL5-T120-M2100-P-S103BTL0K77 BTL5-T110-M0930-P-S103BTL0K8F BTL5-T110-M4500-P-SA303-S103 BTL0N5C BTL5-T110-M2400-P-S103BTL5-T110-M0500-P-S103 (V2)BTL5-T110-M1800-P-S103 (V2)BTL5-T110-M0250-B-S103 (V2)BTL0469 BTL5-Q5020-M0508-P-S140BTL046K BTL5-Q5021-M0457-P-S140德国BALLUFF巴鲁夫位移传感器工作原理BTL049C BTL5-Q5222-M0203-P-S140BTL049E BTL5-Q5222-M1000-P-S140BTL049H BTL5-Q5231-M0051-P-S140BTL049K BTL5-Q5231-M0407-P-S140BTL04C4 BTL5-Q5621-M0077-P-S140BTL04C9 BTL5-Q5631-M0203-P-S140BTL04EF BTL5-Q5654-M0305-P-S140BTL00Z5 BTL5-D112-M0350-P-S93BTL03AM BTL5-D112-M0050-P-S93BTL03AN BTL5-D112-M0150-P-S93BTL03AP BTL5-D112-M0175-P-S93德国BALLUFF巴鲁夫位移传感器工作原理BTL03AR BTL5-D112-M0200-P-S93BTL03AT BTL5-D112-M0250-P-S93BTL03AU BTL5-D112-M0300-P-S93BTL03AW BTL5-D112-M0400-P-S93BTL03AY BTL5-D112-M0450-P-S93BTL03AZ BTL5-D112-M0600-P-S93BTL03C0 BTL5-D112-M0650-P-S93BTL03C1 BTL5-D112-M0700-P-S93BTL03C2 BTL5-D112-M0850-P-S93BTL03C2 BTL5-D112-M0850-P-S93BTL03C3 BTL5-D112-M1000-P-S93德国BALLUFF巴鲁夫位移传感器工作原理BTL03C4 BTL5-D112-M1200-P-S93BTL03C5 BTL5-D112-M1250-P-S93BTL03C6 BTL5-D112-M1500-P-S93BTL03C6 BTL5-D112-M1500-P-S93BTL03C7 BTL5-D112-M1600-P-S93BTL03C8 BTL5-D112-M1900-P-S93BTL03C9 BTL5-D112-M3250-P-S93BTL03CA BTL5-D114-M0500-P-S93BTL03CC BTL5-D114-M1200-P-S93BTL0CAH BTL5-D112-M1950-P-S93BTL0E91 BTL5-D112-M0500-P-S93BTL0JN1 BTL7-E170-M0075-B-NEX-S32 BTL00MR BTL5-A11-M0300-B-KA05BTL0150 BTL5-A11-M0300-B-S32BTL015U BTL5-A11-M0050-B-S32BTL015Y BTL5-A11-M0100-B-KA05BTL015Z BTL5-A11-M0100-B-S32BTL0160 BTL5-A11-M0120-B-SA225-KA01 BTL0161 BTL5-A11-M0125-B-S32BTL0162 BTL5-A11-M0150-B-S32BTL0163 BTL5-A11-M0175-B-KA05BTL0164 BTL5-A11-M0175-B-S32BTL0166 BTL5-A11-M0200-B-S32BTL0167 BTL5-A11-M0200-B-SA42-KA05 BTL0168 BTL5-A11-M0225-B-S32BTL0169 BTL5-A11-M0250-B-S32BTL016A BTL5-A11-M0275-B-S32BTL016E BTL5-A11-M0290-B-SA225-KA01 BTL016F BTL5-A11-M0300-B-SA56-S32 BTL016L BTL5-A11-M0340-B-SA56-S32 BTL016M BTL5-A11-M0350-B-S32BTL016P BTL5-A11-M0400-B-S32BTL016T BTL5-A11-M0450-B-S32BTL016U BTL5-A11-M0500-B-S32BTL016Z BTL5-A11-M0500-B-SA56-S32 BTL0170 BTL5-A11-M0550-B-S32BTL0171 BTL5-A11-M0580-B-SA56-S32 BTL0172 BTL5-A11-M0600-B-S32BTL0174 BTL5-A11-M0650-B-S32BTL0175 BTL5-A11-M0650-B-SA56-S32BTL0177 BTL5-A11-M0750-B-S32BTL0178 BTL5-A11-M0800-B-S32BTL0179 BTL5-A11-M0800-B-SA56-S32 BTL017A BTL5-A11-M0900-B-S32BTL017C BTL5-A11-M1000-B-S32BTL017E BTL5-A11-M1100-B-S32BTL017H BTL5-A11-M1500-B-S32BTL017K BTL5-A11-M4200-B-S32BTL017L BTL5-A11-M4300-B-S32BTL017M BTL5-A11-M4450-B-S32BTL0313 BTL5-A11-M0030-B-S32BTL0C83 BTL5-A11-M0325-B-S32BTL0F7U BTL5-A11-M2750-B-S32BTL0FNP BTL5-A11-M0400-B-KA05BTL0FNR BTL5-A11-M1800-B-KA05BTL0FNT BTL5-A11-M4000-B-S32BTL0L66 BTL5-A11-M0960-B-SA56-S32 BTL0NM7 BTL5-A11-M1535-B-S32BTL017U BTL5-C10-M0350-B-S32BTL017W BTL5-C17-M0100-B-S32BTL017Y BTL5-C17-M0750-B-KA05BTL017Z BTL5-C17-M0750-B-S32BTL0180 BTL5-C17-M0750-B-SA182-KA05 德国BALLUFF巴鲁夫位移传感器工作原理。
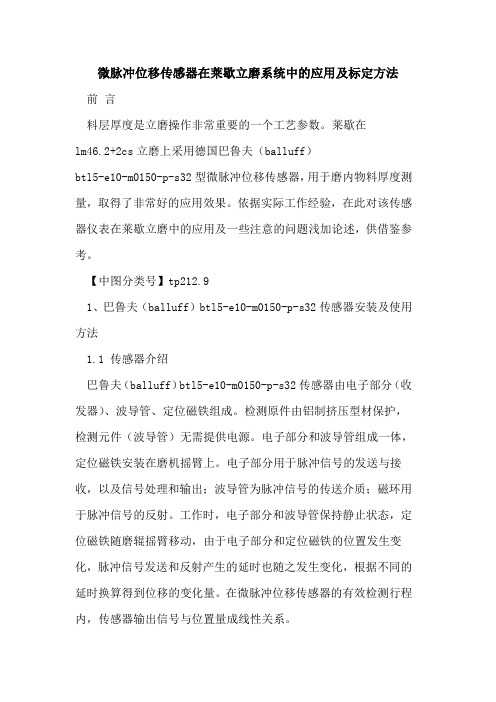
巴鲁夫 BTL5-B系列位移传感器

Contents Rod seriesMicropulse TransducersB.2General data B.4Analog interface B.6Digitalpulse interface B.8SSD interfaceB.10CANopen interface B.12PROFIBUS-DP interface B.14Magnets and floatsB.16Installation notes B.18Special seriesBTL5 Rod-style100 g/6 ms per IEC 60068-2-2712 g, 10...2000 Hz per IEC 60068-2-6yesTranszorb protection diodes 500 V (GND to housing)IP 67 (when BKS-S... IP 67 connector is in place)Anodized aluminum/1.4571 stainless tube,1.3952 stainless investment cast flange thread M18×1,5, 3/4"-16UNF on request 600 bar installed in hydraulic cylinderconnector or integral cableEN 55011 Group 1, Class A IEC 61000-4-2 Severity Level 3IEC 61000-4-3 Severity Level 3IEC 61000-4-4 Severity Level 4IEC 61000-4-6 Severity Level 30025, 0050, 0075, 0100, 0125, 0150, 0175, 0200, 0225, 0250, 0275, 0300, 0325, 0350, 0375, 0400, 0425, 0450, 0475, 0500, 0550, 0600, 0650, 0700, 0750, 0800, 0850, 0900, 0950, 1000, 1100, 1200, 1300, 1400, 1500, 1600, 1700, 1800, 1900, 2000, 2250, 2500, 2750, 3000, 3250, 3500, 3750, 3850, 4000 or in 5-mm increments on requestSeriesShock load VibrationPolarity reversal protected Overvoltage protection Dielectric strengthEnclosure rating per IEC 60529Housing materialMountingPressure rating Connection type EMC testings:RF emissionStatic electricity (ESD)Electromagnetic fields (RFI)Fast transients (BURST)Line-carried noise,induced by high-frequency fieldsStandard nominal strokes [mm]General Data Rod SeriesMicropulse Transducers Pressure rated to 600 bar,high repeatability,non-contact, rugged The BTL Micropulse trans-ducer is the rugged position feedback system for use under extreme ambient conditions measuringbetween 25 and 4000 mm.The actual waveguide is protected inside a high-pressure resistant stainless steel tube. The system is ideal for use in hydraulic cylinders for position feedback or as a level monitor with aggressive media in the food andchemical industries.B.2Included–Transducer (select your interface starting page B.4)–Jam nuts M18×1.5–User's manual▼Please order separately:Magnets page B.14Floats page B.15Connectors starting page BKS.3Micropulse TransducersGeneral Data Rod Serieshttp://www.balluff.deAnalog interface Rod seriesMicropulse Transducers B.4Included:–Transducer –Jam nut–Calibration device 112774–User's guide Please order separately:Magnets page B.14Connectorsstarting page BKS.3▼100 % Null- and endpoint calibrationNull and endpoint of theanalog signal can be button-set to the desired position.Depending on theapplication, teach-in or adjust mode is used,selectable by pressing a button combination.Teach-inUsed for changing thefactory set null and end point with a new null and end point. First the magnet must be brought to the new null point and then to the new end position, and therespective values stored by pressing the button.AdjustHere you can adjust to a new start and end value.This may be required when you cannot physically move the magnet to the standard null and/or end point.Move the magnet to the new start and end position, and adjust the displayed value by pressing the button until the desired output values are reached.Select calibration method1. Place magnet in new null position.Procedure for teach-in,rising signalFeatures of Micropulse BTL5-A/C/E/G...B –100 % adjustment of analog signal– 3 calibration modes:Teach-in, adjustment for null and end point, and online setting–Electronics head can be replaced if needed –Short housing –Error signal:No magnet in measuring area,transducer in calibration modeOnline settingThis programming function allows you to set the null and end point while in run mode, such as in a closed loop configuration. During the calibration procedure no error signal is output, so that no uncontrolledmovement of the hydraulics can occur.The calibration range is limited to ± 12.5 %.before afterCalibration device 115379BTL5-A-EH01Please enter code for output signal, nominal stroke and connection type in ordering code!Preferred models Interfaces A11 and E10 BTL5-A11-M_ _ _ _-B-S 32, BTL5-E10-M_ _ _ _-B-S 32 marked in blue are available from stock.Analog interfaceRod seriesMicropulseTransducers0025, 0050, 0075, 0100, 0125,0150, 0175, 0200, 0225, 0250,0275, 0300, 0325, 0350, 0375,0400, 0425, 0450, 0475, 0500,0550, 0600, 0650, 0700, 0750,0800, 0850, 0900, 0950, 1000,1100, 1200, 1300, 1400, 1500,1600, 1700, 1800, 1900, 2000,2250, 2500, 2750, 3000, 3250,3500, 3750, 3850, 4000 or in5-mm increments on request.1risingand falling(for A and G)0rising7falling(for C and E)BTL5-E1_-M_ _ _ _-B-_ _ _ _OutputsignalStandardnominal strokes [mm]Ordering example:S 32ConnectorKA02PUR cable 2 mKA05PUR cable 5 mKA10PUR cable 10 mKA15PUR cable 15 mConnection type100 % stroke adjustment ▼▼http://www.balluff.deASIC INFO: +49 (0) 71 58/1 73-2 41Micropulse Transducers B.6P-InterfaceCompatible with BTAothers.BTL, is assured by the electronics can create ahighly accurate P-interface cost effectively and with a minimum of effort using theBalluff digitizing chip. The digitizing chip was deve-loped as a high-resolution,configurable ASIC for the Micropulse P-interface.44QFP digitizing chip CPU-controller4/8Bit-BUS5 VOsz.INITMicropulse transducer with 1 to 4 magnetsController or processing electronicsP-pulse outputBenefits–High resolution:the 1 µm actual resolution of the BTL transducer is fully supported by the 5 µmresolution of the chip (at low clock frequency 2 or 20 MHz)–Position data from4 magnets can be processed simultaneously–4/8-bit processor interfaceDigital pulse interface Rod seriesMicropulse Transducers Ordering example:BTL5-P1-M_ _ _ _-B-_ _ _ _Standardnominal strokes [mm]Included:–Transducer –Jam nut–User's manualPlease order separately:Magnets page B.14Connectors starting page BKS.3▼0275, 0300, 0325, 0350, 0375,0800, 0850, 0900, 0950, 1000,1100, 1200, 1300, 1400, 1500,1600, 1700, 1800, 1900, 2000,2250, 2500, 2750, 3000, 3250,3500, 3750, 3850, 4000 orin 5 mm increments on request.S 32ConnectorKA02PUR cable 2 m KA05PUR cable 5 m KA10PUR cable 10 m KA15PUR cable 15 mConnection type Please enter code for nominal stroke and connection type in ordering code!marked in blue are available from stock.▼▼T emperature range–40...+85 °Chttp://www.balluff.deSSD interface Rod seriesSSD InterfaceSynchronous serial data transmission for controls made by Siemens,Schleicher, B & R, PEES,Schiele, Parker, Esitron etc.as well as for BalluffBDD-AM 10-...-1-SSD and BDD-CC 08-1-SSD display/controllers.BTL5-S1... with processor/controller, wiring exampleMicropulse Transducers B.8Reliable signal transmission,even over cable lengths of up to 400 m between control and BTL transducer is assured by especiallynoise-immune RS485/422differential line drivers and receivers. Any noise signals are effectively suppressed.Super-fast 2 kHz Sampling rateClock frequencydepends on cable length Cable length <25 m <50 m <100 m <200 m <400 mClock freq.<1000 kHz <500 kHz <400 kHz <200 kHz <100 kHzSSD interfaceRod seriesMicropulseTransducers Please enter code for coding, system resolution,nominal stroke and connection type in ordering code!▼Included:–Transducer–User's guidePlease order separately:Magnets page B.14Floats page B.15Connectors starting page BKS.3▼0Binary code rising (24 bits)1Gray code rising (24 bits)6Binary code rising (25 bits)7Gray code rising (25 bits)Ordering example:BTL5-S1_ _-M_ _ _ _-B-_ _ _ _Coding0025, 0050, 0075, 0100,0125, 0150, 0175, 0200,0225, 0250, 0275, 0300,0325, 0350, 0375, 0400,0425, 0450, 0475, 0500,0550, 0600, 0650, 0700,0750, 0800, 0850, 0900,0950, 1000, 1100, 1200,1300, 1400, 1500, 1600,1700, 1800, 1900, 2000,2250, 2500, 2750, 3000,3250, 3500, 3750, 3850,4000 or in 5 mmincrements on request.11µm25µm310µm420µm540µmSystemResolutionStandardnominal strokes [mm]S 32ConnectorKA02PUR cable 2 mKA05PUR cable 5 mKA10PUR cable 10 mKA15PUR cable 15 mConnection typesuper linearhttp://www.balluff.deCANopen interface Rod seriesMicropulse Transducers B.10CANopen interface Based on CAN (ISO/IEC 7498 andDIN ISO 11898), CANopen provides a Layer-7implementation for industrial CAN networks. The serial data protocol of the CAN specification is defined according to the producer-consumer principle as opposed to most other fieldbus protocols. Thiseliminates target addressing of the process data. Each bus station decides for itself how the received data are processed.The CANopen interface of the Micropulse transducer is compatible with CANopen conforming with CiA Stan-dard DS301 Rev. 3.0, and with CAL and Layer 2 CAN networks.CAN-BUS features–Line topology, star structure also possible using repeaters–Cost-effective 2-wire cabling–Fast response times, high data integrity using CRC,hamming distance of 6–Potential-free data transmission (RS485)– 1 Mbps at cable lengths < 25 m–Number of stations protocol-limited to 127CANopen offers a high level of flexibility with respect to functionality and dataexchnge. Using a standard data sheet in the form of an EDS file it is easy to link the Micropulse transducers to any CANopen system.Process Data Object (PDO)Micropulse transducers send their position information optionally in one or two PDOs with 8 bytes of data each. The contents of the PDOs is free configurable.The following information can be sent:–Current magnet position with resolution in 5 µm steps–Current velocity of the magnet with resolution selectable in 0.1mm/s steps–Current status of the four freely programmable cams.Synchronisation Object (SYNC)Serves as a net-wide trigger for synchronizing all network participants. When theSYNC object is received, all Micropulse transducers active on the bus store their current position and velocity information and then send it sequentially to the control.This assures time-synchronous capture of the measured values.Emergency Object This object is sent with the highest priority. This is used for example for errormessages when cam states change.Service Data Object (SDO)Service Data Objects trans-mit the parameters for the transducer configuration.The transducer configuration may be carried out on the bus by the controller, or offline using a PC with aconfiguration tool which runs under Windows. Theconfiguration is stored in the transducer in a non-volatile memory.CANopen Draft Standard 406 (Encoder Profile)CANopen system structuresCiA 199911-301v30/11-009VelocityPositionSPS/PC mit CAN-BUS interfaceRRSimple CANopen-System including position and velocity displayCANopen interface Rod seriesMicropulse TransducersPosition + VelocityPROFIBUS-DP interface Rod seriesMicropulse Transducers B.12As the market leading standard for serial data transmission for process automation, PROFIBUS-DP is the ideal choice for implementing automation tasks with cycle times of > 5 ms.Data transmission A PROFIBUS telegram can contain up to 244 bytes of user data per telegram and station. The BTL5-T uses max. 32 bytes (max. 4position values and max. 4velocity values) for process data transmission. Up to 126active stations (Address 0...125) can be connected on PROFIBUS-DP . User data cannot be sent with station address 126. This address is used as the default address for bus stations that have to be parameterized by a Class 2 master (for setting the device address if there are no mechanical switches available).Each PROFIBUS station has the same priority. Prioritizing of individual stations is not intended, but can be done by the master since the bus transmission only makes up a fraction of the process cycle anyway.At a transmission rate of 12 Mbps, the transmission time for an average data telegram is in the 100 µs range.MasterThere are two types of possible masters forPROFIBUS-DP . Master Class 1 carries out the user data interchange with the connected slaves. Master Class 2 is intended forstartup and diagnostic pur-poses and may be used to briefly assume control of a slave.GSD(Device Master Data)The length of the dataexchangeable with a slave is defined in the Device Master Data file (GSD) and ischecked by the slave with the configuration telegram and confirmed for correctness.In modular systems, various configurations are defined in the GSD file. Depending on the desired functionality,one of these configurations can be selected by the user when the system is configured. The BTL5-T is a modular device with the possibility of selecting the number of magnets (position values).SlaveOnce a PROFIBUS master has received the parameter set defined for the slave, it is able to exchange data.The parameter set consits of slave parameters and configuration data. The parameter data contain the description of the slave settings (e.g. resolution of a position value). Theconfiguration data describe the length and structure of the data telegram.For security reasons a slave is allowed to be written with new output data only by the master which previously parameterized andconfigured it. Only after the slave acknowledges both messages (parameter data and configuration data) can it be assumed that theconfiguration and function of the slave are known to the master.Process dataUnder PROFIBUS-DP the default is for process data to be sent from the master to slaves acyclically and for the slave data to then be queried. To ensuresynchronization of multiple devices, the master may use the SYNC and FREEZE services.After a RESET or after power is restored, the masterattempts to establish contact with all the parameterized slaves in order of lowest to highest address.PROFIBUS-DP permitsmultiple Class 1 and Class 2masters to be connected (see illustration below).PROFIBUS-DP Standard EN 50170Slave 1 Slave 2Slave 3 Slave 4 Slave xMaster Class 1Master Class 2Device address DIP switch settableS103 3-pin134S103 5-pin32415PROFIBUS-DP interface Rod seriesMicropulse TransducersPlease enter code forsoftware configuration and nominal stroke in ordering code!Included:–Transducer –User's guidePlease order separately:Magnets starting page B.14Connectors starting page BKS.6GSD file BTL5TGSD 119399 (free of charge)▼Data GNDR×D/T×D-N (A)R×D/T×D-P (B)VP +5 V +24 V 0 V (GND)Ground PROFIBUS-DP Shield supplyOrdering example:BTL5-T1_ 0-M_ _ _ _-B-S103Softwareconfiguration0025,0050,0075, 0100,0125,0150,0175, 0200,0225,0250,0275, 0300,0325,0350,0375,0400,0425,0450,0475, 0500,0550,0600,0650, 0700,0750,0800,0850, 0900,0950,1000,1100, 1200,1300,1400,1500,1600,1700,1800,1900, 2000,2250,2500,2750, 3000, 3250,3500, 3750, 3850 or in 5 mm increments on request.Standardnominal strokes [mm]1 1 magnet 2 2 magnets 3 4 magnetsPin assignments Control and data signals Supply voltage and shield▼Position + Velocityhttp://www.balluff.deMicropulse TransducersMagnets Rod seriesB.14MicropulseTransducersFloats Rod seriesDescription for seriesOrdering codeMaterial WeightOperating/Storage temperature Displacement in water Pressure resistance (static)http://www.balluff.deMicropulseTransducers B.16Installation notesRod seriesInstallation inhydraulic cylindersApplicationHydraulic cylinder withclosed-loop controlInstallationThe BTL Micropulsetransducer is provided with an M18 × 1.5 mounting thread. We recommend mounting into non-magnetizable materials.If magnetizable materials are used, the installation must be carried out as shown in the drawing below. Sealing is at the flange mounting surface, using the supplied O-ring 15.4 × 2.1 with the M18 × 1.5 thread..Threaded port to ISO 6149MicropulseTransducersHassle-free service Cylinder-mounted trans-ducers are often located in difficult to access spots. If a transducer is damaged or fails, replacing the complete transducer with head and waveguide is often a difficult and expensive proposition.Should a problem occur in the electronics of theInstallation notes Rod seriesMicropulse transducer, the electronics head can beeasily and quickly exchanged for a new one. The fluid circuit also remains intact,with no draining necessary.Servicing a vertical installationServicing a horizontal installationhttp://www.balluff.deMicropulse Special seriesDifficult applications often make special demands on the sensors. Balluff meets these requirements with transducers that have been specified and developed in conjunction with the systems integrator. Behind this is a large, highly motivated Micropulse development team as well as Balluff's own EMC Testing Laboratory and shock and vibration test centers.MicropulseWegaufnehmer B.18Special seriesThe "3-in-1" transducer!–2- or 3-way redundant positioning system for heightened safety requirements–One transducer consists of two or three completely separate positioning lines –Start/Stop or analog interfaces–Compact housing Available outputs:–analog 0...10 V,4...20 mA, 0...20 mA,–10...10 V–P-type pulse interfaceTilt control on rail carsPropeller pitch controlRudder control0...10 V 4...20 mA 0...20 mA –10...10 VMicropulse TransducersSpecial seriesMeasure travelwith the highest precisionMicropulse Transducers B.20。
微脉冲位移传感器在莱歇立磨系统中的应用及标定方法
微脉冲位移传感器在莱歇立磨系统中的应用及标定方法前言料层厚度是立磨操作非常重要的一个工艺参数。
莱歇在lm46.2+2cs立磨上采用德国巴鲁夫(balluff)btl5-e10-m0150-p-s32型微脉冲位移传感器,用于磨内物料厚度测量,取得了非常好的应用效果。
依据实际工作经验,在此对该传感器仪表在莱歇立磨中的应用及一些注意的问题浅加论述,供借鉴参考。
【中图分类号】tp212.91、巴鲁夫(balluff)btl5-e10-m0150-p-s32传感器安装及使用方法1.1 传感器介绍巴鲁夫(balluff)btl5-e10-m0150-p-s32传感器由电子部分(收发器)、波导管、定位磁铁组成。
检测原件由铝制挤压型材保护,检测元件(波导管)无需提供电源。
电子部分和波导管组成一体,定位磁铁安装在磨机摇臂上。
电子部分用于脉冲信号的发送与接收,以及信号处理和输出;波导管为脉冲信号的传送介质;磁环用于脉冲信号的反射。
工作时,电子部分和波导管保持静止状态,定位磁铁随磨辊摇臂移动,由于电子部分和定位磁铁的位置发生变化,脉冲信号发送和反射产生的延时也随之发生变化,根据不同的延时换算得到位移的变化量。
在微脉冲位移传感器的有效检测行程内,传感器输出信号与位置量成线性关系。
1.2微脉冲位移传感器在莱歇立磨上的安装和调试1.2.1 测量原理1.2.2 安装方法(1)安装时,先将传感器电子部分安装在磨辊轴承座侧面;然后将定位磁铁支架安装在主辊摇臂侧面;最后再定位磁铁用随机螺帽固定后装好保护罩螺栓即可。
(2)微脉冲位移传感器的电气信号连接要采用屏蔽电缆,按照传感器说明书和立磨电气接线图连接到液压系统本地控制盘上。
(3)电子部分防护罩螺栓要防止松动,禁止使用焊接的方法安装;定位磁铁的安装位置与波导管中心线的中心距保持在15~30mm。
1.2.3 传感器使用注意事项(1)在正常的环境条件下,气流和气压的变化对微脉冲位移传感器的工作影响很小;但当气流和气压变化较大时,会使微脉冲位移传感器产生测量误差。
柏林精密传感器(Balluff)系列加速度传感器产品介绍说明书

Sensor systems for turbomachineryAccelerometers with external charge amplifiersCA202C A280C A 306C A 134C A901100 pC/g (400 g)-55 to 260o C 0.5 to 8000 Hz100 pC/g (500 g)-55 to 260o C0.5 to 10000 Hz 50 pC/g (100 g)-55 to 500o C 5 to 3000 Hz 10 pC/g (500 g)-196 to 500oC 0.5 to 6000 Hz 10 pC/g (500 g)-196 to 700o C3 to 3700 HzTransducer Cable Softline, armouredEC 112 - MI EC 069 - MI MI, overbraided EC 119 (390) - softline, armouredEC 222 - softlineMIEC 119 (390)For heavy-duty gas and steam turbines. Piezoelectric accelerometer for use over an extended temperature range.For heavy-duty and aero-derivative gas turbines, gearboxes, compressors and marine applications. Multi-purpose, compact piezoelectric accelerometer for use over an extended temperature range.For aero-derivative and industrial gas turbines. Piezoelectric accelerometer for use at high temperatures. Similar parts are standard with numerous OEMs.For cryogenic applications and gas turbines. Piezoelectric accelerometer for use over a very wide temperature range.For heavy-duty gas turbines. Piezoelectric accelerometer for use at extreme temperatures. Similar parts are standard with numerous OEMs.Galvanic separationExtension cable Conditioner Cable EC 153 - softline K2xx (3xx)2 or 3-wire transmissionIPC 704 in ABA 160GSI 127 galvanicseparation unit GSI 127• Power supply for 2-wireand 3-wire transmissionsystems installed inpotentially explosive environments• µA to mV conversion for long distance (2-wire)signal transmission, up to 1000 m• V to V conversion for short distance (3-wire) signal transmission• Galvanic separation, 4 kV RMS• High rejection of frame voltage• DIN rail mounting • Ex certified versionsIPC 704 conditioner • Signal conditioner for CA and CP sensors • Configurable high-pass and low-pass filters, freq. range 0.5 Hz to 20 kHz • Optional integrator for a velocity output signal • Optional 2-wire current or 3-wire voltage transmission • Ex certified versionsABA 1xx industrial housings • Protection againstmechanical damage, waterand dust (IP66 rated)• Several models and configurations, suitable for1 up to 10 conditioners • Diecast polyester or aluminium enclosure, fully insulated and corrosion resistant• Ex certified versionsEC 153 - softline EC 153 - softline Softline, armouredAccelerometers with built-in or attached electronicsCE134CE281CE311CE68SE125 µA/g (400 g)-55 to 350o C5 to 10000 Hz10 µA/g (200 g)-55 to 260oC3 to 10000 Hz50 µA/g (40 g)-55 to 125o C2 to 8000 Hz100 mV/g (80 g)-55 to 120o C0.5 to 9000 Hz2 mA/g (4 g)0 to 75o C0.2 to 750 HzTransducer Cable Extension cableEC 319 - softlineSoftline, armouredSoftlineEE 139Softline, armouredSoftline, armouredEE 143EC 175EC 175ThreadedBayonetFor heavy-duty gas turbines, aero-derivative gas turbines and compressors.Piezoelectric accelerometer with attached electronics, for use over an extendedtemperature range.For gearboxes, compressors, pumps and fans. Compact piezoelectric accelerometerwith attached electronics, for use over an extended temperature range.For heavy-duty gas and steam turbines. Piezoelectric accelerometer with built-inelectronics, for use in industrial environments.For auxiliary machines. Multi-purpose, compact piezoelectric accelerometer withbuilt-in electronics, for use in industrial environments.For slow-speed rotating machines, hydro turbines and fans. High-sensitivitypiezoresistive accelerometer.Galvanic separationJunction box CableK2xxJB 116 (JB 105)K2xxJB 116 (JB 105)Softline, armouredSoftlineSoftlineSoftline, armouredJB 1xx junction boxes• Protection againstmechanical damage, waterand dust (IP65 rated)• Several models available• Diecast polyester oraluminium enclosure, fullyinsulated and corrosionresistant• Ex certified versions2-wire transmission2-wire transmissionGSI 127 galvanicseparation unitGSI 127• Power supply for 2-wireand 3-wire transmissionsystems installed inpotentially explosiveenvironments• µA to mV conversion forlong distance (2-wire)signal transmission, upto 1000 m• V to V conversion for shortdistance (3-wire) signaltransmission• Galvanic separation,4 kV RMS• High rejection offrame voltage• DIN rail mounting• Ex certified versionsCP103C P 235C P211C P50x 232 pC/bar (20 bar)Overload up to 250 bar-196 to 700o C 2 to 10000 Hz 750 pC/bar (20 bar)Overload up to 100 bar-55 to 520oC 2 to 10000 Hz 25 pC/bar (250 bar)Overload up to 350 bar-196 to 777o C 2 to 15000 Hz 90 pC/barOverload up to 100 bar -70 to 560o C 0.5 to 20000 Hz MI MI MI MI, overbraidedEC 153EC 119 (390)Dynamic pressure sensors for combustion monitoringTransducerCable Very high temperature dynamic pressure sensor. Similar parts are standard with numerous OEMs.High temperature, very high sensitivity dynamic pressure sensor. Similar parts are standard with numerous OEMs.High-temperature dynamic pressure sensors. The GaPO 4 (gallium phosphate) piezoelectric material used ensures outstanding thermal behaviour (no pyroelectricity) and virtually constant sensitivity. Similar parts are standard with numerous OEMs. An active acceleration compensation is available.Very high temperature, compact dynamic pressure sensor. Mostly used for laboratory measurements in extreme environments.Extension cable Galvanic separationConditioner Cable K2xxSoftline Softline, armoured 3 x IPC 704 in ABA 151IPC 704 in ABA 1506 x IPC 704 in ABA 153IPC 704 conditioners• Signal conditioner for CA and CP sensors• Configurable high-pass andlow-pass filters, freq. range 0.5 Hz to 20 kHz • Optional integrator for avelocity output signal• Optional 2-wire current or 3-wire voltage transmission• Ex certified versions 2-wire transmissionGSI 127 galvanicseparation unitGSI 127• Power supply for 2-wire and 3-wire transmission systems installed in potentially explosive environments• µA to mV conversion for long distance (2-wire) signal transmission, up to 1000 m• V to V conversion for short distance (3-wire) signal transmission• Galvanic separation,4 kV RMS • High rejection of frame voltage• DIN rail mounting • Ex certified versionsProximity probes for all displacement measurements8 mV/µm or 2.5 µA/µm (2 mm range)-40 to 180o C 5mm Ø tip8 mV/µm or 2.5 µA/µm (2 mm range)4 mV/µm or 1.25 µA/µm (4 mm range)-40 to 180o C 8.2mm Ø tip 4 mV/µm or 1.25 µA/µm (4 mm range)-25 to 140oC12.7mm Ø tip Pressure proof, 100 bar (tip)4 mV/µm or 1.25 µA/µm (4 mm range)-25 to 140o C 12.7mm Ø tip Pressure proof, 100 bar (tip)Reverse mount 8 mV/µm or 2.5 µA/µm (2 mm range)4 mV/µm or 1.25 µA/µm (4 mm range)-40 to 180o C8.2mm Ø tip Reverse mount 1.33 mV/µm or 0.417 µA/µm (12 mm range)-40 to 180oC 18mm Ø tip1.33 mV/µm or 0.417 µA/µm (12 mm range)-25 to 140o C 25 mm Ø tip Pressure proof, 100 bar (tip)Transducer Cable PA 151Softline KS 107SoftlineSoftline Probe adaptor SoftlineSoftline Softline T Q 401T Q402T Q 422T Q432T Q 412T Q 403T Q423JB 118SG 101 (102)Junction box / protection Galvanic separationConditioner Cable K2xx (3xx)EA 401 (402, 403)EA 401 (402, 403)Flexible conduitMovable, armoured IQS 45x in ABA 1503 x IQS 45x in ABA 1516 x IQS 45x in ABA 153SoftlineDisplacement range from 0.2 to 12 mm. For measuring relative vibration, axial thrust, differential expansion and phase reference on turbomachinery. Transmissiondistances over 1000 m. Various body lengths and tip diameters are standard. High pressure versions, reversible mounting, armoured cable protection and probe adapters are available. These products are compliant with API 670 standards.IQS 45x conditioners• Signal conditioner forTQ 4xx probes • Optional 2-wire current or 3-wire voltage transmission • Diecast aluminium enclosure• Ex certified versions2 or 3-wire transmission GSI 127 galvanicseparation unit GSI 127• Power supply for 2-wireand 3-wire transmission systems installed in potentially explosive environments • µA to mV conversion for long distance (2-wire)signal transmission, up to 1000 m• V to V conversion for shortdistance (3-wire) signal transmission• Galvanic separation,4 kV RMS • High rejection of frame voltage • DIN rail mounting• Ex certified versionsVE210E W140L S 12020 mV / mm/s(1000 mm/s)-29 to 204o C 10 to 1000 Hz 50 mV / mm/s 50 µA / mm/s (100 mm/s)-25 to 80oC0.5 to 400 Hz20 mV / mm/s(1000 mm/s)-29 to 121o C10 to 1000 Hz0.2 to 2 mm ice -55 to 120oC2 to 33 mm -15 to 125o CEC 119 - softline, armoured EC 440 - 3-wire (voltage transmission)EC 439 - 2-wire (current transmission) Velocity sensorsIce detection systemAir gap monitoring system Transducer Extension cable ED 121 - softline ED 120 - softlineC V213C V214For low-speed machines such as hydroelectric turbomachinery. Low-speed velocity transducer with a stainless steel body and a protection rating of IP68, ideal for moist or corrosive environments. The body of the VE 210 transducer includes the signal conditioner electronics.For hydro and steam turbines. Low-speed velocity transducers, resistant to dust and moisture (IP64 rated).For large hydroelectric generators. Monitors the air gap between the rotor and stator.For all gas turbines. Detects initiation of ice on gas turbine inlets. Used by turbine de-icing systems to optimise the use of bleed air.Controller Junction box Conditioner Cable ILS 730 in ABA 151JB 116 (105)K2xx DIC 413K509 (709)ILS 730 conditioner• Signal conditioner for LS air gap transducer• Three voltage-based outputs (pole profile, rotor profile, min. gap); oneselectable 4-20 mA output (factory setting)• Diecast aluminiumenclosure 2-wire transmissionComplete monitoring solutionsOne sourceRequest a complete solution from Meggitt. In our facility in Switzerland more than 600 employees combine their expertise and commitment to design and build all parts of our system: sensors for harsh environments (measuring vibration, dynamic pressure, displacement, blade tip clearance, etc), high performance monitoring systems and software. Our sales and support network delivers outstanding service worldwide.Plant asset management systemTurbine health management systemPiezoelectric Dynamic pressure Proximity Piezoelectric MicrowaveCase studiesHeavy-duty gas turbine: Siemens SGT5-4000F Combustion and vibration monitoring (VM600 with CP and CA sensors)The SGT5-4000F (V94.3A) dry low-NO X gas turbine (GT) is one of the most powerful in operation, designed for large-scale applications with more than 280 MW ISO output. Meggitt is the exclusive supplier of protection and monitoring equipment for this GT, Siemens’ proven workhorse, with more than three hundred units in operation worldwide.One of the major industrial challenges with heavy-duty GTs is to combine the highest possible efficiency with extremely low NO X emissions and lowcombustion temperatures. Measuring the dynamic pressure at different locations in the combustor is a proven way to control combustion. Thus, pulsation monitoring systems are essential during both tuning and operation.The sensors and monitoring equipment provided by Meggitt allow Siemens to control combustion parameters such as fuel injection, which leads to extremely low emissions, reduced fuel consumption and long intervals between major inspections. Our sensing and monitoring systems on the SGT5-4000F include extreme temperature dynamic pressure sensors (CP 216), high sensitivity piezoelectric accelerometers (CA 201 and CA 901) and protection and monitoring systems (VM600).Meggitt is proud to have contributed to making theSGT5-4000F one of the most efficient GTs availablefor power generation applications.Hydro turbine-generator: Cahora Bassa hydro power plant (Mozambique)Air gap and vibration monitoring (VM600 with CE, LS, SE and TQ sensors)The Cahora Bassa dam on the Zambezi river was completed in 1975 and renovated in 2003; its plant comprises five Francis turbines with a total power of 2.1 GW. Within the renovation project, Alstom selected Meggitt to provide machinery vibration and generator air gap sensors with a networked protection and condition monitoring system. Condition monitoring of hydroelectric generators is critically important, especially monitoring the distance between the rotor poles and the stator walls, called air gap. To increase efficiency in generators, the air gap is reduced to a minimum. However, both the stator and the rotor on large hydroelectric machines can be quite flexible and their shape and location are affected in operation by centrifugal, thermal and magnetic forces. This means that the air gap can only be effectively measured while the generator is in service. In the absence of effective monitoring, efficiency would decrease and potential machine damage could occur.In Cahora Bassa, each generator is equipped with a capacitive air gap measurement system (4x LS 120 sensors with ILS 730 conditioners). This on-line system is used when the machine is rotating and withstands the extremely high magnetic fields in the air gap. Furthermore, each turbo generator has piezoresistive, low-noise, low-frequency SE 120 accelerometers to measure the bearings’ absolute vibrations. On rotating parts, the relative shaftSGT5-4000F (© Siemens AG)Balance-of-plant: Yonghung thermal power plant (South Korea)Proximity, displacement and vibration monitoring (VM600 with TQ and CE sensors)Yonghung is the largest coal-fired power plant in South Korea. Each 870 MW supercritical unit is designed for variable pressure operation at 3600 RPM and 560°C. Yonghung is designed with the philosophy of preserving the environment using two stage combustion with low-NO X burners followed by selective catalytic reduction.To ensure efficient plant operation and to achieve their environmental objectives, Yonghung TPP has 22 VM600 racks that provide over 800 dynamic measurement points on units 3 and 4. These Meggitt systems secure and monitor a variety of machines for the steam turbine and the balance-of-plant in Yonghung, such as BFP (boiler feed pump) turbines, BFP motors, forced daft fans, primary air fans, condensate pumps (booster and water), blowers and air compressors.At Yonghung TPP, Meggitt’s highly reliable sensors for harsh environments measure a range of vibration and displacement characteristics. Proximity probes (TQ 402) and piezoelectric accelerometers (CE 680) measure shaft position, relative shaft vibration (x-y), rotational speed of shaft and bearing broad-band absolute vibration. Furthermore, Vibro-Meter sensors on the primary air fan enable the pre-heater system to use hot air to remove moisture from coal before the combustion process, which reduces NO X emissions. The machinery protection functions and the condition monitoring functions of the VM600 system then process the signals and provide a complete data overview. This is necessary to maintain an efficient plant operation through diagnostics and plant health management.vibration is performed by the TQ 402 proximity probes. The stator’s structural vibrations are monitored with compact piezoelectric accelerometers (CE 680). Coupled with our sensors, the VM600 protection and condition monitoring system ensures the highest safety level during operation.Early detection of air gap anomalies using the equipment supplied by Meggitt enables condition monitoring of Cahora Bassa hydroelectric generators. As a result, plant efficiency is optimised, generator damage can be avoided and operators can more efficientlypredict and plan maintenance outages.Cahora Bassa HPP (courtesy of Hidroelectrica de Cahora Bassa)Yonghung TPP (courtesy of Vibro Korea)。
巴鲁夫微脉冲位移传感器

微脉冲位移传感器
BTL
Sensors Worldwide
BTA 输出信号一览
电压输出:
BTA-A11-... BTA-G11-... BTM-A1-... BTA-C1_-... BTA-E1_-... BTM-E1-... BTM-H1
0 - 10 V -10 - +10 V 0 - 20 mA 4 - 20 mA
便宜且可靠
可旋转的感应面
允许各种安装方式
Products
微脉冲位移传感器
BTL
Ex 外壳结构
Sensors Worldwide
尾端螺纹 不锈钢感应管
完全适用于液压缸和液位检测
将浮子保持在杆 上
磁环或浮子
刚性管接头
确保最高的防护等级
各种认证
Factory Mutual 及 CENELEC 认证
Class I, Div 1, Groups A, B, C, D Class II/III, Div 1, Groups E, F, G II G Eex d IIC T6 IP68
也可用于 DEX !!
微脉冲位移传感器
BTL
Sensors Worldwide
数字式脉冲接口
1 - 3 µ INIT 脉冲 s
PLC
脉冲-宽度-调制 (PWM Pulse-Width-Modulated ) START/STOP
5V 0V 5V
0V
微脉冲位移传感器
BTL
Sensors Worldwide
• 直接与控制器简单连接
44QFP digitizing chip
• 4/8 位处理器接口 • 同步串行数据出口 • 最大分辨率 5 µm
BTLB 巴鲁夫位移传感器 Profibus-DP接口

任意
20...28 V DC
≤ 120 mA
–40...+85 °C
–40...+100 °C
BTL504B2.GSD
机械开关、二类主站
< 200
< 400
< 1000
1500
900
187.5
一般数据 模拟量接口 数字脉冲接口 SSI 接口 CANopen 接口 PROFIBUS-DP 接口 用于液压缸定位 的传感器 定位磁环与浮子 安装提示 特殊型号系列
整个系统的温度漂移系数
定位磁环运行速度仓储温度
GSD文件
地址分配
电缆长度 [m]
波特率 [kbps]
接线配置 控制和数据信号
外部供电电源与屏蔽
在订货时,请在订货编号中标明 软件配置及额定检测长度。
标准订货中包含: – 位移传感器 – 简明用户手册
另请单独订购: 定位磁环 见 B.16 安装螺帽 见 B.16 插头 从 BKS.6 起 GSD文件BTL5TGSD 119399 (免费)
< 1200 93.7/19.2/9.6
数据地 R×D/T×D-N (A) R×D/T×D-P (B) VP +5 V +24 V 0 V (GND) PROFIBUS-DP地 屏蔽接入
订货举例: BTL5-T1_ 0-M_ _ _ _-_-S103
S103 5针 3 2 4 1
5
S103 3针
1 3 4
优点: – 无需专门设计活塞或活塞
杆 – 活塞密封之间无需加入永
磁体 – 编程简单 – 调节时间短 – 高分辨率、高重复精度 – 任意通过调节装置或编程
输入端均可实现开关点编 程
balluff-btl7-v50d-m-产品-使用指南说明书

BTL7-V50D-M _ _ _ _ -A/B/Y/Z(8)-C003 BTL7-V50E-M _ _ _ _ -A/B/Y/Z(8)-C003 BTL7-V50T-M _ _ _ _ -A/B/Y/Z(8)-C003deutschKurzanleitungi shCondensed guideenglNotice résuméei sfrançaIstruzioni brevii tali anoInstrucciones breves español中文简明指南1Der Wegaufnehmer bildet zusammen mit einer Maschinen-steuerung (z. B. SPS) ein Wegmesssystem. Er wird zu seiner Verwendung in eine Maschine oder Anlage einge-baut und ist für den Einsatz im Industriebereich vorgese-hen. Die einwandfreie Funktion gemäß den Angaben in den technischen Daten wird nur mit original Balluff Zubehör zugesichert, die Verwendung anderer Komponenten bewirkt Haftungsausschluss.Das Öffnen des Wegaufnehmers oder eine nichtbestim-mungsgemäße Verwendung sind nicht zulässig und führen zum Verlust von Gewährleistungs- und Haftungsansprü-chen gegenüber dem Hersteller.Die Installation und die Inbetriebnahme sind nur durch geschultes Fachpersonal zulässig.Der Betreiber hat die Verantwortung, dass die örtlich geltenden Sicherheitsvorschriften eingehalten werden. Insbesondere muss der Betreiber Maßnahmen treffen, dass bei einem Defekt des Wegmesssystems keine Gefah-ren für Personen und Sachen entstehen können.Bei Defekten und nichtbehebbaren Störungen des Weg-aufnehmers ist dieser außer Betrieb zu nehmen und gegen unbefugte Benutzung zu sichern.Eine ausführliche Betriebsanleitung und die Konfigurations-anleitung erhalten Sie im Internet unter oder per E-Mail bei ******************.Im Wegaufnehmer befindet sich der Wellenleiter geschützt durch ein Edelstahlrohr. Entlang des Wellenleiters wird ein Positionsgeber bewegt. Dieser Positionsgeber ist mit dem Anlagenbauteil verbunden, dessen Position bestimmt werden soll.Die Beschreibungen der LED-Anzeigen sind der ausführlichen Betriebsanleitung zu entnehmen.ACHTUNGFunktionsbeeinträchtigungUnsachgemäße Montage kann die Funktion des Wegauf-nehmersbeeinträchtigen und zu erhöhtem Verschleiß führen.►Die Anlagefläche des Wegaufnehmers muss vollstän-dig an der Aufnahmefläche anliegen.►Die Bohrung muss perfekt abgedichtet sein (O-Ring/Flachdichtung).Wegaufnehmer mit dem Befestigungsgewinde in das Einschraubloch eindrehen (Drehmoment max. 100 Nm).Bei waagerechter Montage mit Nennlängen > 500 mm ist der Stab abzustützen und gegebenenfalls am Ende anzu-schrauben (nur bei Ø 10,2 mm möglich).Beim Einbau in Hydraulikzylinder darf der Positionsgeber nicht auf dem Stab schleifen. Minimaler Bohrungsdurch-messer im Aufnahmekolben:deutschMit dem CE-Zeichen bestätigen wir, dass unsere Produkte den Anforderungen deraktuellen EMV-Richtlinie entsprechen.File No.E227256 2N r. 910169 D E ∙ L 16; Än d e r u n g e n v o r b e h a l t e n . E r s e t z t F 14.deutschInbetriebnahme1. Anschlüsse auf festen Sitz und richtige Polung prüfen.Beschädigte Anschlüsse tauschen.2. System einschalten.3. Messwerte prüfen (insbesondere nach dem Austauschdes Wegaufnehmers oder der Reparatur durch den Hersteller). Gegebenenfalls den Wegaufnehmer neu einstellen.Das Einstellverfahren ist in der ausführlichen Betriebsanleitung beschrieben.Hinweise zum Betrieb–Funktion des Wegmesssystems und aller damit ver-bundenen Komponenten regelmäßig überprüfen. –Bei Funktionsstörungen das Wegmesssystem außerBetrieb nehmen.–Anlage gegen unbefugte Benutzung sichern.Schirmung und KabelverlegungDefinierte Erdung!Wegaufnehmer und Schaltschrank müssen auf dem gleichen Erdungspotenzial liegen.SchirmungZur Gewährleistung der elektromagnetischen Verträglich-keit (EMV) sind folgende Hinweise zu beachten:–Wegaufnehmer und Steuerung mit einem geschirmtenKabel verbinden.Schirmung: Geflecht aus Kupfer-Einzeldrähten, Bede-ckung mindestens 85 %.–Steckerausführung: Schirm im Steckverbinder mit demSteckergehäuse flächig verbinden.MagnetfelderDas Wegmesssystem ist ein magnetostriktives System. Auf ausreichenden Abstand des Wegaufnehmers und des Aufnahmezylinders zu starken externen Magnetfeldern achten.KabelverlegungKabel zwischen Wegaufnehmer, Steuerung und Stromver-sorgung nicht in der Nähe von Starkstromleitungen verle-gen (induktive Einstreuungen möglich). Kabel zugentlastet verlegen.KabellängeBei Verwendung von CAT5e-Kabel beträgt die maximale Kabellänge 100 m 3).3) Voraussetzung: durch Aufbau, Schirmung und Verlegung keine Einwir-kung fremder Störfelder.Pinbelegung Steckverbinder (Draufsicht auf Stecker am Wegaufnehmer)1) Nicht belegte Adern können steuerungsseitig mit GND verbunden werden, aber nicht mit dem Schirm.2) Bezugspotenzial für Versorgungs s pannung und EMV-GND.1The Transducer, together with a machine controller (e.g. PLC), comprises a position measuring system. It is intended to be installed into a machine or system and used in the industrial sector. Flawless function inaccordance with the specifications in the technical data is ensured only when using original Balluff accessories. Use of any other components will void the warranty.Opening the transducer or non-approved use are notpermitted and will result in the loss of warranty and liability claims against the manufacturer.Installation and startup may only be performed by trained specialists.The operator is responsible for ensuring that local safety regulations are observed. In particular, the operator must take steps to ensure that a defect in the positionmeasuring system will not result in hazards to persons or equipment.If defects and unresolvable faults occur in the transducer, it should be taken out of service and secured against unauthorized use.A complete user’s guide and the configuration guide can be downloaded from the Internet at or requested via e-mail from ******************.The transducer contains the waveguide which is protected by an outer stainless steel tube (rod). A magnet is moved along the waveguide. This magnet is connected to the system part whose position is to be determined.The descriptions of the LED displays can be found in the comprehensive user’s guide.NOTICE!Interference in functionImproper installation can compromise the function of the transducer and result in increased wear.►The mounting surface of the transducer must makefull contact with the supporting surface.►The bore must be perfectly sealed (O-ring/flat seal).Screw the transducer thread into the mounting hole (max. torque 100 Nm).For horizontal assembly with nominal lengths > 500 mm, support the rod and tighten it at the end if necessary (only possible with a diameter of 10.2 mm).If installed in a hydraulic cylinder, the magnet should not make contact with the rod. Minimum bore diameter in thesupport piston:englishThe CE Mark verifies that our products meet the requirements of the currentEMC Directive.File no.E227256 2N o . 910169 E N ∙ L 16; S u b j e c t t o m o d i fi c a t i o n . R e p l a c e s F 14.englishStartup1. Check connections for tightness and correct polarity.Replace damaged connections.2. Turn on the system.3. Check measured values (especially after replacing thetransducer or after repair by the manufacturer). Recalibrate the transducer, if necessary.The calibration procedure is described in the comprehensive user’s guide.Operating notes–Check the function of the transducer and all associatedcomponents on a regular basis.–Take the position measuring system out of operationwhenever there is a malfunction.–Secure the system against unauthorized use.Shielding and cable routingDefined ground!The transducer and the control cabinet must be at the same ground potential.ShieldingTo ensure electromagnetic compatibility (EMC), observe the following:–Connect the transducer and controller using a shieldedcable.Shielding: Copper filament braided, at least 85% coverage.–Connector version: Shield is internally connected toconnector housing.Magnetic fieldsThe position measuring system is a magnetostrictive system. It is important to maintain adequate distance between the transducer cylinder and strong, external magnetic fields.Cable routingDo not route the cable between the transducer, controller, and power supply near high voltage cables (inductive stray noise is possible). The cable must be routed tension-free.Cable lengthThe maximum cable length when using CAT5e cables is 100 m 3).3) Prerequisite: Construction, shielding and routing preclude the effect of any external noise fields.Pin assignment of connector (view of connector pins of transducer)1) Unassigned leads can be connected to GND on the controller side but not to the shield.2) Reference potential for supply voltage and EMC-GND.1Couplé à une commande de machine (p. ex. API), lecapteur de déplacement constitue un système de mesure de déplacement. Il est monté dans une machine ou une installation et est destiné aux applications dans le domaine industriel. Son bon fonctionnement, conformément aux indications figurant dans les caractéristiques techniques, n’est garanti qu’avec les accessoires d’origine de Balluff, l’utilisation d’autres composants entraîne la nullité de la garantie.Tout démontage du capteur de déplacement ou toute utilisation inappropriée est interdit et entraîne l’annulation de la garantie et de la responsabilité du fabricant.L’installation et la mise en service ne doivent être effectuées que par un personnel qualifié.Il est de la responsabilité de l’exploitant de veiller à ce que les dispositions locales concernant la sécurité soient respectées. L’exploitant doit en particulier prendre les mesures nécessaires pour éviter tout danger pour les personnes et le matériel en cas de dysfonctionnement du système de mesure de déplacement.En cas de dysfonctionnement et de pannes du capteur de déplacement, celui-ci doit être mis hors service et protégé contre toute utilisation non autorisée.Une notice d’utilisation détaillée et des instructions concernant la configuration sont disponibles sur le site internet ou sur demande par courriel à ******************.Le capteur de déplacement abrite le guide d’ondes, qui est protégé par un tube en acier inoxydable. Un capteur de position se déplace le long du guide d’ondes. Le capteur de position est relié à l’élément de l’installation dont la position doit être déterminée.Les affichages à LED sont décrits en détail dans la notice d’utilisation.ATTENTIONLimitations de fonctionnementUn montage incorrect peut limiter le bon fonctionnement du capteur de déplacement et entraîner une usure prématurée.►La surface d’appui du capteur de déplacement doitparfaitement couvrir la surface de réception. ►Le perçage doit être parfaitement étanche (jointtorique / plat).Visser le capteur de déplacement avec le filetage de fixation dans le trou de vissage (couple de serrage 100 Nm).En cas de montage horizontal avec des longueursnominales > 500 mm, la tige doit être soutenue et, le cas échéant, vissée à l’extrémité (uniquement possible pour Ø 10,2 mm).En cas de montage dans un vérin hydraulique, le capteur de position ne doit pas frotter contre la tige. Diamètre deperçage minimal dans le piston de réception :françaisAvec le symbole CE, nous certifions que nos produits répondent auxexigences de la directive CEM actuelle. 2N ° 910169 F R ∙ L 16 ; s o u s r és e r v e d e m o d i fi c a t i o n s . R e m p l a c e F 14.françaisMise en service1. Vérifier la fixation et la polarité des raccordements.Remplacer les raccordements endommagés.2. Mettre en marche le système.3. Vérifier les valeurs (en particulier après remplacementdu capteur de déplacement ou réparation par le fabricant). Le cas échéant, procéder à un nouveau réglage du capteur de déplacement.La procédure de réglage est décrite dans la notice d’utilisation détaillée.Conseils d’utilisation–Contrôler régulièrement les fonctions du capteur dedéplacement et de tous ses composants.–En cas de dysfonctionnement, mettre le système horsservice.–Protéger le système de toute utilisation non autorisée.Blindage et pose des câblesMise à la terre définie !Le capteur de déplacement et l’armoireélectrique doivent être reliés au même potentiel de mise à la terre.BlindagePour garantir la compatibilité électromagnétique (CEM), les consignes suivantes doivent être respectées :–Le capteur de déplacement et la commande doiventêtre reliés par un câble blindé : tresse de fils de cuivre, couverture minimum 85 %.–Modèle de connecteur : relier à plat le blindage duconnecteur au boîtier de connecteur.Champs magnétiquesLe système de mesure de déplacement est un système magnétostrictif. Veiller à ce que le capteur de déplacement et le vérin de réception se trouvent à une distance suffisante de champs magnétiques externes de forte intensité.Pose des câblesNe pas poser le câble reliant le capteur de déplacement, la commande et l’alimentation à proximité d’un câble haute tension (possibilités de perturbations inductives). Ne poser le câble que lorsque celui-ci est déchargé de toute tension.Longueur de câbleLa longueur maximale pour un câble CAT5e est de 100 m 3).3) Condition préalable : la structure, le blindage et le câblage excluent toute influence de champs perturbateurs externes.Affectation des broches du connecteur (vue de dessus sur le connecteur du capteur de déplacement)1) Les conducteurs non utilisés peuvent être reliés coté commande à la masse GND, mais pas au blindage.2) Potentiel de référence pour tension d’alimentation et GND CEM.1Il trasduttore di posizione Micropulse costituisce insieme a un comando macchina (per es. PLC) un sistema di misura della corsa. Per poter essere utilizzato, il trasductore deve essere montato su una macchina o su un impianto ed è destinato all’impiego in ambiente industriale. Ilfunzionamento corretto secondo le indicazioni dei dati tecnici è garantito soltanto con accessori originali Balluff, l’uso di altri componenti comporta l’esclusione della responsabilità.L’apertura o l’uso improprio del trasduttore di posizione non sono consentiti e determinano la decadenza di qualsiasi garanzia o responsabilità da parte della casa produttrice.L’installazione e la messa in funzione sono consentite soltanto da parte di personale specializzato addestrato.Il gestore ha la responsabilità di far rispettare le norme di sicurezza vigenti localmente. In particolare il gestore deve adottare provvedimenti tali da poter escludere qualsiasi rischio per persone e cose in caso di difetti del sistema di misura della corsa.In caso di difetti e guasti non eliminabili del trasduttore di posizione questo deve essere disattivato e protetto contro l’uso non autorizzato.Per il manuale d’uso dettagliato e le istruzioni per la configurazione consultare in Internet l’indirizzo o inviare un’e-mail a ******************.Nel trasduttore di posizione si trova la guida d’onda,protetta da un tubo in acciaio inox. Lungo la guida d’onda viene spostato un datore di posizione. Questo datore di posizione è collegato al componente dell’impianto del quale deve essere determinata la posizione.Le descrizioni dei display LED sono riportate nel manuale d’uso dettagliato.ATTENZIONEAnomalie funzionaliIl montaggio non corretto può ostacolare ilfunzionamento del trasduttore di posizione e provocare una maggiore usura.►La superficie di appoggio del trasduttore di posizionedeve poggiare completamente sulla superficie di alloggiamento.►Il foro deve essere perfettamente chiuso a tenuta(O-ring/guarnizione piatta).Avvitare il trasduttore di posizione con la filettatura di fissaggio nel foro di avvitamento (coppia max. 100 Nm).Per un montaggio orizzontale con lunghezze nominali > 500 mm, la barra va sostenuta ed eventualmente avvitata all’estremità (possibile solo per Ø 10,2 mm)Durante il montaggio nel cilindro idraulico il datore di posizione non deve sfregare contro la barra. Diametrominimo del foro nel pistone di alloggiamento:italianoIl marchio CE è la conferma che i nostri prodotti sono conformi ai requisitidell'attuale Direttiva EMC.File No.E227256 2N . 910169 I T ∙ L 16; c o n r i s e r v a d i a p p o r t a r e m o d i fi c h e . S o s t i t u i s c e F 14.italianoMessa in funzione1. Controllare che i collegamenti siano fissati saldamentee che la loro polarità sia corretta. Sostituire i collegamenti danneggiati.2. Attivare il sistema.3. Controllare i valori misurati (in particolare dopo lasostituzione del trasduttore di posizione o la riparazione da parte della casa produttrice). Eventualmente regolare nuovamente il trasduttore di posizione.La procedura di regolazione è descritta nel manuale d’uso dettagliato.Avvertenze per il funzionamento–Controllare periodicamente il funzionamento delsistema di e di tutti i componenti ad esso collegati. –In caso di anomalie di funzionamento disattivare ilsistema di misura della corsa.–Proteggere l’impianto da un uso non autorizzato.Schermatura e posa dei caviMessa a terra definita!Il trasduttore di posizione e l’armadio elettrico devono trovarsi sullo stesso potenziale di terra.SchermaturaPer garantire la compatibilità elettromagnetica (CEM) è necessario rispettare le seguenti avvertenze:–Collegare il trasduttore di posizione e l’unità di controllocon un cavo schermato.Schermatura: maglia di singoli fili di rame, copertura almeno 85%.–Esecuzione del connettore: collegare la schermaturanel connettore con il corpo del connettore sull’intera superficie.Campi magneticiIl sistema di misura della corsa è un sistemamagnetostrittivo. Mantenere una distanza sufficiente del trasduttore di posizione e del cilindro sul quale è montato dai campi magnetici esterni intensi.Posa dei caviNon posare i cavi fra il trasduttore di posizione, il comando e l’alimentazione elettrica in prossimità di linee ad alta tensione (sono possibili interferenze induttive). Posare il cavo senza tensione.Lunghezza dei caviSe si utilizzano cavi CAT5e la lunghezza massima dei cavi è di 100 m 3).3) Premessa: la struttura, la schermatura e la posa devono essere tali da impedire l’influenza di campi di disturbo esterni.Piedinatura del connettore (vista in pianta del connettore sul trasduttore di posizione)1) I fili non utilizzati possono essere collegati con GND lato controllo, ma non con la schermatura.2) Potenziale di riferimento per tensione di alimentazione e CEM-GND.(presa)1El transductor de desplazamiento forma un sistema de medición de desplazamiento junto con un control de máquina (por ejemplo, PLC). Para utilizarlo, se monta en una máquina o instalación y está previsto para el uso en la industria.El funcionamiento óptimo según las indicaciones que figuran en los datos técnicos sólo se garantiza con accesorios originales de Balluff; el uso de otroscomponentes provoca la exoneración de responsabilidad.No se permite la apertura del transductor dedesplazamiento o un uso indebido. Ambas infracciones provocan la pérdida de los derechos de garantía y de exigencia de responsabilidades ante el instalación y la puesta en servicio sólo se permiten a personal técnico cualificado.El explotador es responsable de respetar las normas de seguridad locales vigentes. En particular, el explotador debe adoptar medidas destinadas a evitar peligros para las personas y daños materiales si se produce algún defecto en el sistema de medición de desplazamiento.En caso de defectos y fallos no reparables en eltransductor de desplazamiento, éste se debe poner fuera de servicio e impedir cualquier uso no autorizado.Obtendrá un manual de instrucciones detallado y el manual de configuración en la página de Internet o por correo electrónico escribiendo a ******************.En el transductor de desplazamiento se encuentra el guíaondas, protegido mediante un tubo de aceroinoxidable. A lo largo del guíaondas se mueve un sensor de posición. Este sensor de posición está unido con el componente de la instalación cuya posición se desea determinar.Las descripciones de los indicadores LED se pueden consultar en el manual de instrucciones detallado.ATENCIÓNMerma del funcionamientoUn montaje indebido puede mermar el funcionamiento del transductor de desplazamiento y causar un mayor desgaste. ►La superficie de contacto del transductor dedesplazamiento debe coincidir completamente con la superficie de alojamiento.►El orificio debe estar perfectamente hermetizado(junta tórica/junta plana).Enrosque el transductor de desplazamiento con la rosca de fijación en el agujero roscado (par máx. 100 Nm).En caso de montaje horizontal con longitudes nominales > 500 mm, la varilla debe apoyarse y, dado el caso, atornillarse en el extremo (solo posible con Ø 10,2 mm).En el montaje en un cilindro hidráulico, el sensor de posición no debe rozar la varilla. Diámetro mínimo delorificio en el pistón de alojamiento:españolCon el marcado CE confirmamos que nuestros productos cumplen con los requerimientosde la directiva CEM actual.File No.E227256BTL7-V50D/E/T -M _ _ _ _ -A/B/Y/Z(8)-C003Transductor de desplazamiento — forma constructiva de varilla 2N .° 910169 E S ∙ L 16; r e s e r v a d o e l d e r e c h o a m o d i fi c a c i o n e s . S u s t i t u y e F 14.españolPuesta en servicio1. Compruebe que las conexiones estén asentadasfirmemente y tengan la polaridad correcta. Sustituya las conexiones dañadas.2. Conecte el sistema.3. Compruebe los valores de medición (sobre tododespués de sustituir el transductor de desplazamiento o de repararlo el fabricante). Dado el caso necesario, reajuste el transductor de desplazamiento.El procedimiento de ajuste está descrito en el manual de instrucciones detallado.Indicaciones sobre el servicio–Compruebe periódicamente el funcionamiento delsistema de medición de desplazamiento y todos los componentes relacionados.–Si se producen fallos de funcionamiento, ponga fuerade servicio el sistema de medición de desplazamiento. –Asegure la instalación contra cualquier uso no autorizado.Blindaje y tendido de cablesPuesta a tierra definidaEl transductor de desplazamiento y el armario eléctrico deben estar a idéntico potencial de puesta a tierra.BlindajePara garantizar la compatibilidad electromagnética (CEM), se deben tener en cuenta las siguientes indicaciones:–Conecte el transductor de desplazamiento y el controlcon un cable blindado.Blindaje: malla de hilos individuales de cobre, cobertura mínima del 85 %.–Ejecución de conector: conecte superficialmente elblindaje en el conector con la carcasa del mismo.Campos magnéticosEl sistema de medición de desplazamiento es un sistema magnetostrictivo. Preste atención a que exista suficiente distancia entre el transductor de desplazamiento y el cilindro de alojamiento y campos magnéticos externos intensos.Tendido de cablesNo tienda los cables entre el transductor dedesplazamiento, el control y la alimentación de corriente cerca de líneas de alta tensión (posibilidad deperturbaciones inductivas). Tienda los cables descargados de tracción.Longitud de cableSi se utilizan cables CAT5e, la máxima longitud de cable es de 100 m 3).3) Requisito: no deben intervenir campos parasitarios externos a consecuencia del montaje, blindaje y tendido.BTL7-V50D/E/T -M _ _ _ _ -A/B/Y/Z(8)-C003Transductor de desplazamiento — forma constructiva de varillaAsignación de pines del conector (vista desde arriba del conector en el transductor de desplazamiento)1) Los conductores no utilizados se pueden conectar en el lado del control con GND, pero no con el blindaje.2) Potencial de referencia para la tensión de alimentación y CEM-GND.1外置式位感器与设备控制器(例如PLC)组成使用规定一套行程测量系统。
BTL_5_Dev..

BTL 5 DeviceNet接口与Omron PLC的连接操作导论本手册分为两大部分:1 硬件连接2 硬件组态3 软件设置与参数读取目录1 硬件连接 (3)2 硬件组态 (5)3 软件设置与参数读取 (7)1 硬件连接根据图(1)和图(2)的接线引脚配置,将Omron PLC的CPU,DeviceNet 总线模块CJIW-DRM21以及BTL 5 DeviceNet总线接口的直线位移传感器连接起来,如图(3)。
图(1),DeviceNet引脚配置图(2),BTL 5 DeviceNet总线接口直线位移传感器的引脚配置图(3),硬件连接2 硬件组态1.打开OMRON软件CX-One的硬件组态软件CX-Integrator;2.点击“网络”菜单中的“通讯设置”,以选择相应的PLC型号;3.点击“网络”菜单中的“在线工作”,建立电脑与PLC之间的连接;4.右键单击DeviceNet CJIW-DRM21的连接,此时会弹出对话框,点击“传送”;5.这时,就会搜到整个DeviceNet网络上的设备。
3 软件设置与参数读取1.双击位移传感器的图标,来设置直线位移传感器的参数;2.点击“上载”,可以获得原先已设置的位移传感器的参数;3.在此,我们设定使用两个磁块,分辨率为2 μm,输出顺序为第一个磁块的位置和第二个磁块的位置;1)在编辑设备参数中,将Number of Magnets改为2,将Assembly Position Active改为XXXXXXXX XXXX0011,即激活两个磁块;并将Options改为Attribute sorted,即输出顺序按第一个磁块的位置和第二个磁块的位置排列。
2)将M1_Position_Fomat_[Units]的数值改为8708,即单位为μm,并将M1_Position_Measuring_Increment改为,即分辨率改成了2 μm。
3)同理,将磁块2的参数M2也按上述M1的修改。
巴鲁夫位移传感器说明书

系列 冲击负载 振动 极性反接保护 过电压保护 绝缘强度 外壳防护等级 符合 IEC 60529 外壳材料 安装方式 10.2 mm 不锈钢管耐压强度 8 mm 不锈钢管耐压强度 连接方式 电磁兼容性测试: 无线电放射干扰 (RF) 静电干扰 (ESD) 电磁场干扰 (RFI) 瞬间高速干扰脉冲 (BURST) 因高频场感应干扰引起的 线路噪声 标准额定检测长度 [mm] 直径8 mm金属管 检测长度至1016 mm
BTL5-E1_-M_ _ _ _-... 4...20 mA或20...4 mA ≤ 500 Ω ≤ 0.66 µA
BTL5-C1_-M_ _ _ _-... 0...20 mA或20...0 mA ≤ 500 Ω ≤ 0.66 µA
BTL5-G11-M_ _ _ _-... –10...10 V及10...–10 V 最大 5 mA ≤ 5 mV ≤ 0.33 mV
一般数据 模拟量接口 数字脉冲接口 SSI 接口 CANopen 接口 PROFIBUS-DP 接口 用于液压缸定位 的传感器 定位磁环与浮子 安装提示 特殊型号系列
BTL5-A11... 0 V 输出 10...0 V 0...10 V GND +24 V DC (GND)
≤ 5 µm 系统分辨率/最小 2 µm f = 2 kHz ±100 µm(至500 mm 额定检测长度) ±0.02 % (500...4500 mm 额定检测长度) [150 µV/°C + (5 ppm/°C × P × U/L)] × ∆T [0.6 µA/°C + (10 ppm/°C × P × I/L)] × ∆T 20...28 V DC ≤ 150 mA 有 Transzorb保护二极管 500 V DC(外壳对地) –40...+85 °C –40...+100 °C
BALLUFF压力传感器使用说明书

Intended useThe pressure sensor was developed to monitor the pres-sure of gases or fluids compatible with stainless steel,ceramics and fluoroelastomers. Pressure sensors aresuited to different types of application depending on thedevice and mechanical connection.The pressure sensor is installed in a machine orintegrated into a system. Flawless function in accordancewith the specifications in the technical data is ensured onlywhen using original BALLUFF accessories, and use of anyother components will void the warranty.Modifications to the sensor or non-approved use are notThese sensors must not be used in applicationsin which the safety of persons is dependent onthe function of the device (not a safety compo-nent acc. to EU Machinery Directive).Installation and startup are to be performed only bytrained specialists.The operator is responsible for ensuring that local safetyregulations are observed.In particular, the operator must take measures to ensurethat a defect in the object detection system will not resultin hazards to persons or equipment.If defects or non-clearable faults in the sensor occur, take itout of service and secure against unauthorized use.high temperatures or rapid increases in pressurethat extend beyond specific limits (see TechnicalData for limit values).–Always depressurize and disconnect pressure sensorsfrom the power supply before mounting!–Observe the following when mounting outdoors or in adamp environment:Select a mounting location that allows splash andcondensation water to drain away. Fluids must not beallowed to accumulate on sealing surfaces!Connect the device to the power supply immediatelyafter mounting to prevent moisture from entering theconnector. Otherwise fit a suitable protective cap toprevent the ingress of moisture. The degree of protec-tion specified on the data sheet only applies if thedevice is connected!If there is a danger of damage from lightning strikes orexcess voltage, mount an overvoltage protectionbetween the power supply unit or switching cabinetand the device.–On hydraulic systems, position the device so that thepressure connection faces upwards (depressurization).–If the device is mounted on a steam pipeline, install acooling section.–Mount the device in a location protected from directsunlight. Sunlight can damage or affect the functionalcapability of the device.–When installing devices with a relative reference in thehousing (no borehole next to the electrical connection),make sure that the relative reference required for themeasurement is protected against dirt and moisture. Ifthe device is exposed to fluids, the relative referenceblocks the air pressure compensator. Accuratemeasurements are not possible when this happens.and the device may be damaged.–No mechanical tension should be placed on the pres-sure connection during installation as this may displacethe characteristic curve. This applies in particular toextremely small pressure ranges and devices with aplastic pressure connection.Standard andHigh-end sensors–BSP Mxxx-... (measurement in millibar)–BSP Wxxx-... (measurement in millibar, -1 bar)–BSP Kxxx-... (measurement in kilobar)–the sealing surface on the relevant part is perfectlyclean and free of residues,–the O-ring seated in the slot provided is undamaged.1. Screw the device into the mounting thread with onehand.Secure devices to the steel pressure connection using a spanner flat. Observe the following torques:Fig. 3: Display and connection housing rotates 320°Fig. 2: Electrical connection and process connectionAdapter for processconnectionFig. 1: Dimensional drawingEstablish the electrical connection to the device according to the specifications indicated on the type plate, the pin assignment table below and the wiring diagram.sensors from the power supply before esta-blishing an electrical connection.Fig. 4: Sensor diagram with analog outputFig. 3: Sensor diagram with 2 switching outputsBSP pressure sensors can be adapted to different process connections using adapters (accessories) available as an optional extra. The adapters must be ordered separately. Adapters for other process connections are available on request.Adapter G 1/4"Ordering code: BAM01KP Stainless steel Connection:Sensor end: G 1/4" Process end: G 1/4"Torque approx. 5 NmAdapter NPT 1/4"Ordering code: BAM01KT Stainless steel Connection:Sensor end: G 1/4" Process end: NPT 1/4"Torque approx. 30 NmAdapter G 1/4"for attachment to pressure gaugeOrdering code: BAM01KR Stainless steel Connection:Sensor end: G 1/4"Process end: G 1/4" forattachment to pressure gauge according to EN 837Torque approx. 20 NmThe pressure sensor is configured according to VDMA standards.2. Green LED Out 1: status indicator for switching output 13. Yellow LED Out 2: status indicator for switching output 24. Seven-segment display for measured values andparameters5. Button for navigating within a menu6. Button for switching from menu to menuAdjustable hysteresisThe difference between the switching point (SP) and return point (RP) is known as a hysteresis. On electronic pressure switches, any hysteresis can be selected within the mea-suring range.Hysteresis function: the hysteresis keeps the switching status of the outputs stable, even if the system pressure fluctuates either side of the setpoint value. The output is activated when the system pressure rises and the relevant switching point (SP) is reached. The output is deactivated when the pressure decreases again and the return point pressure limit and a defined upper limit is known as a window. A switching operation is initiated as soon as the upper or lower limit of the programmed pressure range is exceeded.occurs, but only once a preselected delay time of 0...50 s has elapsed. If the switching event no longer exists by the time the delay has elapsed, the switching output does not change.Fig. 7: Delay functionLegend*Menus marked with an asterisk do not appear if the sensor has an analog output.Therefore never use pointed objects or com-pressed air to clean the membrane.The device is maintenance-free in principle. If required, the housing can be cleaned with a damp cloth and mild cleaning solution provided the device is switched off.The membrane may become covered with deposits and contamination, depending on the measuring material. If the nature of the material is known, the operator mustdefine appropriate cleaning intervals. When the device is decommissioned correctly, the membrane can be cleaned carefully with a mild cleaning solution and a soft brush or sponge.protective measures.Always depressurize and disconnect the device from thement. Therefore always takeappropriate protective measures and dispose ofthe device correctly.The device must be disposed of according to European Directives 2002/96/EC and 2003/108/EC (Waste Electrical and Electronic Equipment). Equipment should be disposed of separately from domestic waste!Your pressure sensor typeThe type plate contains the exact designation and most important technical data so that the device can be identi-fied clearly.Ordering code Part designationT = Temperature-resistantZ = General special design T = Temperature-resistantN o . 883 462 E . E d i t i o n 1110; S u b j e c t t o m o d i fic a t i o n . R e p l a c e s e d i t i o n 1106Balluff GmbHIndustriestraße B162345 Brunn am Gebirge AustriaTel. +43 2236 32521-0Fax +43 2236 32521-46*****************I Balluff Sensortechnik AG Riedstrasse 68953 Dietikon SwitzerlandPhone +41 43 3223240Fax +41 43 3223241************************I Balluff GmbHSchurwaldstraße 973765 Neuhausen a.d.F .GermanyTel. +49 7158 173-0Fax +49 7158 5010******************I 。
巴鲁夫位移传感器说明书

BTL5-T1_ _-M_ _ _ _-B/Z-S103Read this manual before installing and operating the Micropulse Trans-ducer.1.1Proper applicationThe BTL5 Micropulse transducer is intended to be installed in a ma-chine or system. Together with a PROFIBUS Master it comprises a position measuring system and may only be used for this purpose.Unauthorized modifications and non-permitted usage will result in the loss of warranty and liability claims.1.2Qualified personnelThis guide is intended for special-ized personnel who will perform the installation and setup of the system.1.3Use and inspectionThe relevant safety regulations must be followed when using the trans-1ducer system. In particular, steps must be taken to ensure that should the transducer system become de-fective no hazards to persons or property can result. This includes the installation of additional safety limit switches, emergency shutoff switches and maintaining the per-missible ambient conditions.1.4ScopeThis guide applies to the model BTL5-T1...B/Z-S103 Micropulse transducer.An overview of the various models can be found in Section 6 Versions (indicated on part label) on page 7.Note: For special versions, which are indicated by an -SA_ _ _ des-ignation in the part number, other technical data may apply (affect-ing calibration, wiring, dimen-sions etc.).1Safety Advisory.....................21.1Proper application..................21.2Qualified personnel ................21.3Use and inspection ................21.4Scope. (2)2Function andcharacteristics......................32.1Characteristics .......................32.2Function .................................32.3Available stroke lengths andmagnets .................................33Installation ............................33.1Mounting................................33.2Transducer, Installation...........43.3Magnets, Installation ..............54Wiring ....................................55Startup...................................75.1Check connections ................75.2Turning on the system............75.3Check output values ..............75.4Check functionality ................75.5Fault conditions......................76Versions (indicated on part label)......................................77Configuration........................87.1Default settings ......................87.2Presets ...................................87.3Configuration withCOM PROFIBUS....................87.4Configuring usingSiemens Step7.....................127.5General configuration notes.167.6Parameter data.....................177.7I/O configuration ..................197.8Diagnostic data (19)8T echnical Data ....................218.1Dimensions, weights,ambient conditions...............218.2Supply voltage (external)......218.3Control signals .....................218.4Connection to the processor 218.5Included in shipment............218.6Software...............................218.7Magnets (order separately)...218.8Accessories (optional). (21)The following patents have been granted in connection with this product:US Patent 5 923 164Apparatus and Method for Auto-matically Tuning the Gain of an AmplifierUL authorization File No.E2272562.1Characteristics–High data reliability: output data are checked in the µC for validityand plausibility.–Up to 4 positions can be pro-cessed–Definable working strokes–Absolute output signal–High resolution, repeatability and linearity–Insensitive to shock, vibration, contamination and noise–Max. fieldbus length 1200 m–Configuration using Step7, COM-PROFIBUS, WinDP, or otherconfiguration softwarer–Protected to IP 67 per IEC 60529–Pressure rated to 600 bar.–DIP switches for address setting –DIP switches for bus termination2.2FunctionThe transducer contains a wave-guide enclosed by an outer stain-less steel rod. A magnet attached to the moving member of the machine or to the cylinder piston is moved over the rod and its position con-stantly updated.The magnet defines the measured position on the waveguide. An inter-nally generated INIT pulse interacts with the magnetic field of the mag-net to generate a magnetostrictive torsional wave in the waveguide which propagates at ultrasonic speed.The torsional wave arriving at the end of the waveguide is absorbed in the damping zone. The wave arriv-ing at the beginning of the wave-guide creates an electrical signal in the coil surrounding the waveguide. The propagation time of the wave is used to determine the position to a resolution of 5 µm. This takes place with high precision and repeatability at the selected resolution within the measuring range indicated as the nominal stroke length.At the rod end is a damping zone, within which no reliable signal is available, but which may be entered by the magnet.The electrical connection between the transducer, the processor card or controller, and the power supply is accomplished using several plug-in cables.2Dimensions for installing theMicropulse transducer: ➥ Fig. 3-2Dimensions for installing the mag-net: ➥ Fig. 3-42.3Available stroke lengthsand magnetsTo provide for optimum fit in anyapplication, a wide range of stan-dard stroke lengths and magnets invarious form factors are available.Magnets and control arms musttherefore be ordered separately.The following nominal strokelengths are available:Stroke lengths [mm]Increments [mm]50 (50025)500 (100050)1000 (2000100)2000 (4000250)Other stroke lengths on request.33.1MountingWhen possible, use non-magnetiz-able material for attaching the trans-ducer and magnet ring. ➥ Fig. 3-1.When attaching the transducer tomagnetizable materials, appro-priate measures must be taken toprotect against magnetic disturb-ances ➥ Fig. 3-1. Note therecommended distance of thetransducer and cylinder fromstrong, external magnetic fields.Fig. 3-1: Mounting➀ - ➂ for magnetizable materials ➃ for non-magnetizable materials a =Spacer made of non-mag-netizable materialsb =Magnet33.2T ransducer, Installation The smallest permissible distance between magnet ring and rod mounting surface is shown inFig. 3-2.The transducer has either aM18×1,5 thread or a 3/4"-16UNF thread for mounting. The sealing is carried cut with the O-ring supplied at the flange facing.Important Installation Notes: The contact surface of the trans-ducer must be completely con-tacted by the mounting surface. The O-ring supplied must make a perfect pressure seal, i.e. the bevel for the O-ring must be configured exactly as shown in Fig. 3-3.To achieve secure mounting, use the proper nut for the mounting thread. When tightening the nut,cylinder rod should be at least13 mm.When attaching the transducer tomagnetizable materials, appro-priate measures must be taken toprotect against magnetic disturb-ances, ➥ Fig. 3-1. Note therecommended distance of thetransducer and cylinder fromstrong, external magnetic fields.Bevel for O-ring Threaded hole Fig. 3-3: Threaded hole for mounting the BTL with O-ringThreaded holeM18 × 1.5 perISO 6149O-ring 15.4 × 2.1Threaded hole3/4"-16UNF perSAE J475O-ring 15.3 × 2.4do not exceed a tightening torque of100 Nm.For horizontal mounting of trans-ducer with stroke lengths greaterthan 500 mm, the pressure tubeshould be supported or attached atits end.When installing in a hydraulic cylin-der, do not allow the magnet ring torub against the pressure tube. Thebore diameter in the piston andFig. 3-2: Transducer BTL5...B/Z, Dimensions3Fig. 3-4: Magnet (optional)BTL-P-1013-4R3.3Magnets, InstallationA magnet is required for each trans-ducer. This must be ordered sepa-rately. ➥ Fig. 3-4.For mounting the magnet we rec-ommend to use non-magnetizable material. ➥Fig. 3-1.BTL-P-1013-4SBTL-P-1012-4Rage lines to prevent noise coupling.Especially critical is inductive noise caused by AC harmonics (e.g. from phase-control devices), againstwhich the cable shield provides only limited protection.The signal is sent to the controller over the PROFIBUS-DP interface.Max. cable length of the intire field-bus: 1200 mThe transmission speed is a func-tion of cable length. EN 50170 is the reference for the values given in ➥ Table 4-1.Table 4-2: Pin assignments, S103connectorFig. 4-1: Pin assignments BKS,BTL...S103 connectorView of male/female side of the BTL5-T1...S103(female)(male)Power (male)4Fig. 4-2: BTL5-T1-...S103 with processor/controller, shown with S103f o r I P 67 r e q u i r e d !Fig. 4-6: Bus termination resistor (resistors built-in) BKS-S105-R01(optional)Fig. 4-7: Cable with connector (fe-male) BKS-S 48-15-CP-_ _,lengths: 02; 05; 10 m (optional)Fig. 4-4: PROFIBUS cable (male/female)BKS-S103/GS103-CP-_ _, lengths: 00.3; 02.0; 05.0; 10.0 m (optional)straightBKS-S103-00right angle BKS-S104-00Fig. 4-3: Connector (female) for BUS IN (optional)straightBKS-S105-00right angle BKS-S106-00Fig. 4-5: Connectors (male) for BUS OUT (optional)55.1Check connectionsAlthough the connections are polar-ity reversal protected, components can be damaged by improper con-nections and overvoltage. Before you apply power, check the connec-tions carefully.5.2Turning on the systemNote that the system may execute uncontrolled movements when first turned on or when the transducer is part of a closed-loop system whose parameters have not yet been set.6Supply voltage : 1 = DC 24 VElectr. connection :BTL5-T110-M1000-B-S103S103 = 1 × 3-pin male1 × 5-pin male 1 × 5-pin femaleRod Style ,Mounting :B =metric thread M18×1,5Z=Thread 3/4"-16UNFNominal stroke (4 digits):M = Metric units [mm]Type No. of magnetsPDU11fixed Position 1 4 Byte INT32Velocity 1 4 Byte INT3222fixedPosition 1 4 Byte INT32Position 2 4 Byte INT32Velocity 1 4 Byte INT32Velocity 2 4 Byte INT3234fixedPosition 1 4 Byte INT32Position 2 4 Byte INT32Position 3 4 Byte INT32Position 44 Byte INT32M i c r o p u l s e L i n e a r T r a n s d u c e rP R O F I B U S -D P i n t e r f a c eTherefore make sure that no haz-ards could result from these situa-tions.5.3Check output valuesAfter replacing or repairing a trans-ducer, it is advisable to verify the values for the start and end position of the magnet in manual mode. If values other* than those present before the replacement or repair are found, a correction should be made.*Transducers are subject to modifi-cation or manufacturing tolerances.5.4Check functionalityThe functionality of the transducer system and all its associated com-ponents should be regularly checked and recorded.5.5Fault conditionsWhen there is evidence that the transducer system is not operating properly, it should be taken out of service and guarded against unau-thorized use.7➔Fig. 7-1: Location of DIP switches S1Table 7-1: Station addresse7.1Default settingsThe transducer is supplied with the following default settings:–Station address 126–Resolution:Position 5 µm Velocity 0.1 mm/s –Maximum working/useful area 7.2PresetsThe service Set_Slave_Address can be used to configure the station address. For this service you need a DP Master Class 2. The GSD file BTL504B2.GSD (transducer system)is used for configuration. The GSD file provides all the information re-quired for settings. For configuring,the Siemens COM PROFIBUS can be used for example.For use in standard PROFIBUS sys-tems the station address is set be-fore startup using the DIP switches S1 which are built into the BTL ➥ Figs. 7-1 and 7-2 as well as Table 7-1.Fig. 7-3: GSD files in the subdirectory \GSDValues from 0 - 125 can be used for the station address. In a network each address can be used only oince! For value 126 the address 126 or the last address set using the Set_Slave_Address service is used. A value of 127 resets the BTL to its default condition. Since 127does not represent a valid address,bus operation is then not allowed.All address settings only become effective after a power reset.Changes which are made while power is on do not therefore have an immediate effect.TTo ensure a reliable rest signal level the bus must be appropriatelyterminated on both ends as shown in Fig. 4-1. The BTL5-T allows the bus to be terminated internally. To do this set DIP switches S1.9 and S1.10 to ON, ➥ Fig. 7-2. For IP 67the bus termination resistor sug-gested in Fig. 4-7 must be used.Then the internal bus termination should not be activated (S1.9 and S1.10 OFF)!. Stub lines should be avoided whenever possible.7.3Configuration with COM PROFIBUSTo configure the BTL5-T using COM PROFIBUS configuration software,you must be sure to use Version 5or higher of COM PROFIBUS.7.3.1Importing BTL5-TIn order to use the BTL5-T in the software, the GSD and an associ-ated bitmap file must be imported into the corresponding directories of COM PROFIBUS.The GSD file BTL504B2.GSD is copied to the subdirectory \GSD .➥ Fig. 7-3Fig. 7-2: View A, DIP switches S1for setting station address and for bus termination7The bitmap file BTL04B2N.DIB must be copied to the subdirectory \BITMAPS. ➥ Fig. 7-47.3.2Parameterizing the BTL After starting COM PROFIBUS the BTL5-T is located in directory \DP-SLAVE\ENCODER\LINEAR under the name BTL5-T (...) and is inserted into the network configura-tion using Drag&Drop. ➥ Fig. 7-5Double clicking on the BTL icon opens the 'Slave Properties' menu for the BTL.➥ Fig. 7-6Fig. 7-4: Bitmap files in subdirectory \DIBFig. 7-5: Adding BTL5-T to the network using Drag&Drop7The station address configured on the BTL is set under the parameter 'PROFIBUS-Address'. Values from 0-125 are allowed. For better identi-fication a name can be entered forFig. 7-6: 'Slave Properties' menu with BTL5-T Fig. 7-7: Configuration menu (no parameter set)the BTL in the 'Station name' field.If there is more than one Master in the network the selection box'Param. assign. master' can be used to select a Master which setsth eparameters for the BTL upon system start.The [ Configuration ] button is used to open the dialog for BTL param-eterizing. ➥ Fig. 7-7Since the BTL5-T is a modular de-vice there is no active parameter record shown in the illustration. Forthis reason the first step must be to select an appropriate parameter module. Activate the selection listby clicking on the [ Module ] button.➥ Fig. 7-87Double clicking on the desired mod-ule adds it to the configurationtable. Since the BTL is a single-module device, only one modulecan be selected at a time. If a mod-ule was selected previously, theexisting module must be deletedbefore making another selection.➥ Fig. 7-9Clicking on the [ Parameter ] buttonopens the dialog for device param-eterizing. ➥ Fig. 7-10Fig. 7-8: Module selectionFig. 7-9: Configuration menu (with parameter data)Depending on the module selected the parameter number shown may differ. By default the BTL is set to an internal working resolution of 5 µm (parameter 'Pos. Revolution Unit').The external output resolution is 1µm (parameter 'Pos. Engineering Unit'). The velocity is set to 0.1 mm/s. The following settings always refer to the set output resolution.7Fig. 7-10: Parameterizing the BTL5-T...The [ Hex ] button allows you to represent the parameter data in hex format. This function is not however needed under normal circum-stances, and is used mainly for di-rect comparison of the parameter data with the parameter tables shown in this manual. ➥ Fig. 7-117.4Configuring using Siemens Step7To set parameters for the BTL5-T using Step7 configuration software,be sure that Step7 Version 5 or higher with Service Pack 3 is used.7.4.1Import BTL5-TTo use the BTL5-T in the Step7hardware configurator, the GSD file must be imported to the system using the menu point 'Extras' →'Install new GSD'. When updating the GSD file be sure that no appli-cation is currently using the GSD file, since otherwise the system cannot exchange the file.➥ Fig. 7-12Fig. 7-11: Hex representation of the parameter data7.4.2Parameterize BTLAfter importing the BTL5-T will be located in the hardware catalog in path PROFIBUS-DP\ADDITIONAL FIELD DEVICES\ENCODER\BTL5-T.➥Fig. 7-137Fig. 7-12: Installing a new GSD file and updating the catalog contents When selecting a BTL, the modular configuration dictates that you pro-ceed in two steps. In the first step the directory BTL5-T must bedragged and dropped directly to the bus in the graphical configuration representation. ➥ Fig. 7-14Fig. 7-13: Hardware catalog7Fig. 7-14: Using Drag& Drop to add the BTL5-T to the networkFig. 7-15: Using Drag& Drop to add the BTL5-T to the tabulr device configurationIn a second step the function mod-ules are assigned to the device. To do this, select the device in the graphic. Next drag and drop the desired module from the hardware catalog into the tabular device con-figuration. ➥ Fig. 7-15Double clicking on the module in the tabular representation of the device configuration opens the cor-responding dialog for parameter assignment. ➥ Fig. 7-16The .parameter assignment for the BTL is done on the 'Parameter as-signment' tab.Depending on the module selected the parameter number shown maydiffer. By default the BTL is set to an7Fig. 7-16: 'Parameter assignment' tab Fig. 7-17: Hex representation of the parameter data internal working resolution of 5 µm (parameter 'Pos. Revolution Unit').The external output resolution is 1 µm (parameter 'Pos. Engineering Unit'). The velocity is set to0.1 mm/s. The following settings always refer to the set output reso-lution.The [ Hex ] button allows you to represent the parameter data in hex format. This function is not however needed under normal circum-stances, and is used mainly for di-rect comparison of the parameter data with the parameter tables shown in this manual. ➥ Fig. 7-177.5General configuration notesThe meaning and parameterizing which are the basis of Class 1 and Class 2 functionality can be found in the specification “PROFIBUS - Pro-file for Encoder - Order No. 3.062”.If you have problems during startup or configuration of the BTL5-T,check the following points:–The device address used in the configuration system must agree with the address set on the BTL.–The module must be selected to conform with the BTL used. If in doubt, check the BTL part num-ber.–Depending on the parameter assignment you have performed,7both the number and the format of the output values may vary.–If the CPU-315-2-DP is used as the Master, consistend data can be represented in theprocess map only using a maximum of 2words (1x position). To read con-sistent data >4 bytes the SFC 14must be used.–Exceeding the programmed working range limits causes the BTL to issue a diagnostic report (External User Diagnostic). This diagnostic report can be read using SFC 13.–In standard configuration, as soon as an External User Diag-nostic is issued the CPU-315-2-DP switches over to Stop state(controller program stops run-ning). If this response is not de-sired, OB82, OB86 and OB1212should be implemented in the controller. Error response can be encoded in these OBs specifi-cally for each PROFIBUS station.For this you must select the CPU in the hardware configurator and open the menu 'Extras' → 'Re-port system error' . ➥ Fig. 7-18Reporting of system errors to the OBs is activated by using the checkbox 'Create Error OBs'. The content of the Error OBs must then be appropriately coded in the con-trol program.Fig. 7-18: Setting station-specific behavior for "Report system error'77.6Parameter dataTable 7-2a: Parameter data7Table 7-2b: Parameter data7Table 7-3: I/O configuration 7.7I/O configuration7.8Diagnostic dataTable 7-4a: Diagnostic dataThe number of I/O data is specified by the I/O configuration. The datacontents can be specified in the parameter data (Mode_Selector).7Table 7-4b: Diagnostic dataBTL5-T1_ _-M_ _ _ _-B/Z-S103Micropulse Linear Transducer - Rod StyleResolution, selectable in steps of 5 µm Velocity, selectable in steps of 0.1 mm/s Sampling rate f Standard = 1 kHz Non-linearity ± 30 µmHysteresis< 1 LSB Repeatability< 2 LSB (resolution + hysteresis)Temperature coefficient< (6 µm + 5 ppm * nominal length)/K Shock loading 100 g/6 ms per IEC 60068-2-27 1Continuous shock 100 g/2 ms per IEC 60068-2-29 1Vibration 12 g, 10 to 2000 Hz per IEC 60068-2-6 1(take care to avoid inherent reso-nances of protective tube)Pressure up to 600 bar when installed in a hydraulic cylin-der1Individual specifications as per Balluff factory standard8.1Dimensions, weights,ambient conditionsNominal length< 4000 mm Dimensions➥ Fig. 3-2Weight approx. 2 kg/m Housing anodized aluminum Pressure tube stainless steel 1.4571diameter 10,2 mm wall thickness 2 mm e-modulus ca. 200 kN/mm 2Mounting threadsM18 × 1.5 or 3/4"-16UNFOperating temp. –40 °C to +85 °C Humidity < 90%, non-condensing Protection class per IEC 60529 IP 67 when closed up8T Typical values at DC 24 V and 25 °C. Ready for operation at once, full accuracy after warm-up. With magnet BTL-P-1013-4R, BTL-P-1013-4S or BTL-P-1012-4R:8.2Supply voltage (external)Regulated supply voltage BTL5-T1...DC 20 to 28 V Ripple < 0.5 V ssCurrent draw 2< 130 mAInrush< 3 A/0.5 ms Polarity reversal protection built-in Overvoltage protection Transzorb diodes Dielectric strengthGND to housing 500 V2depending on load on VP (repeater,bus terminator)8.3Control signalsRxD/TxD-N, RxD/TxD-P , Data GND per EN 501708.4Connection to the processorCable➥ Fig. 4-1Twisted-pair, shielded.Max. fieldbus length 1200 m 8.5Included in shipmentTransducer (not incl. magnet)➥ Fig. 3-28.6SoftwareOrder the GSD file separately at no cost or download from www.balluff.de underMicropulse Transducers / Software.E-mail requests can be made to PROFIBUS@balluff.de.8.7Magnets(order separately)Magnets BTL-P-1013-4R,BTL-P-1013-4S, BTL-P-1012-4R supplied with appropriate spacer POM 8 mmDimensions➥ Fig. 3-4Weight approx. 10 g Housing anodized aluminum Operating temp. –40 °C to +85 °C Magnets BTL5-P-4500-1(Electromagnet)Weight approx. 80 g Housing plasticOperating temp. –40 °C to +60 °C8.8Accessories (optional)For PROFIBUS connections:Connector (female)➥ Fig. 4-3Connector (male)➥ Fig. 4-5BKS-S103/GS103-C P-_ _ _Cable with connector ➥ Fig. 4-4BKS-S105-R01Termination resistor ➥ Fig. 4-6For power supply:BKS-S48-15-CP-_ _Cable with connector➥ Fig. 4-7N o . 829 987 - 726 E • 01.104569 • E d i t i o n 0405; s p e c i f i c a t i o n s s u b j e c t t o c h a n g e s • R e p l a c e s e d i t i o n 0406.。
BALLUFF 微脉冲位移传感器 说明书

– 处理卡的结构为欧洲插 卡规格,可用于19"组 件插座和插卡座/凸导 轨。
– 位置数据的刷新频率最 大为2 KHz。这样,即便 很快的运动速度,处理 卡都能捕捉到当前的位 置,滞后错误可基本忽 略。
– 微处理器的数字量化控 制,带来了非常高的分 辨率(小至 0.01 mm)。
– 可选择并行数据格式的 二进制码,格雷码和 BCD码。
接口: – InterBus – PROFIBUS-DP – CANopen – DeviceNet – Ethernet TCP/IP – MODBUS – CC-Link
分辨率:1 µm 定位磁块配置 (1...4)
更多技术详情及订货:
WAGO Kontakttechnik GmbH Hansastraße 27 32423 Minden 电话: +49/571/887-0 传真: +49/571/887-169 E-Mail: info@
– 绝缘的DIN面板安装外壳 (包含安装件)
– 8个可编程输出 – 可带8个方向开关点 – 14 mm长7段红色LED数码管显
示,6位显示 – 面板上LED开关位置显示 – 300 个开关点可分配给多达15个
程序
– 零点偏移调整 – 静态和动态开关点均带有空转时
间补偿
– 多个BDD-CC 08可并联 – 内置传感器供电电源300 mA, 24 V – 绝缘的DIN面板安装外壳
74 g
最大冲击加速度
200 g
210 g
最大正弦速度
2.0 m/s 1.9 m/s
最大冲击速度
5.1 m/s
3.5 m/s
最大振幅
51 mmp-p
0...20 mA, 20...0 mA
德国BALLUFF位移传感器

德国BALLUFF位移传感器信息参考来源:广州兰瑟电子科技德国BALLUFF位移传感器分类:BNS完整电子式、机电式行程开关系列、BOS光电开关、BES感应式接近开关、电容开关、BMF磁敏开关,BTL直线位移传感器,RFID识别系统,插接件等。
德国BALLUFF位移传感器型号描述:巴鲁夫(BALLUFF)电感式接近传感器BES 113-356-SA6-S4巴鲁夫(BALLUFF)电感式接近传感器BES 516-300-S 135-S 4-D 巴鲁夫(BALLUFF)电感式接近传感器BES M08MI-PSC20B-BV03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-05 巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-03巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-05巴鲁夫(BALLUFF)电感式接近传感器BESM08EC-PSC15B-S49G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PSC20B-S04G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PS0B-S04G巴鲁夫(BALLUFF)位移传感器BAW G06EE-UAF20B-EP03-K巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP015-GS04巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP03巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP05巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD25F-BP-03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP002-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP015-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP05巴鲁夫(BALLUFF)位移传感器BAW M12MI-UAC20B-S04G巴鲁夫(BALLUFF)位移传感器BAWM08EI-UAD15B-BP002-GS04 巴鲁夫(BALLUFF)电容式接近传感器BCS 010-PSB-1-L-P02巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PS-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S4巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-NSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-PSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-NSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-PSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS-20GM10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BOS-18M-PA-1PD-E5-C-S4,巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BES 516-114-S4-C 10-30V巴鲁夫(BALLUFF)微型断路器BES113-356-SA6-S4巴鲁夫(BALLUFF)微型断路器BES113356SA6-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S135-S4-D巴鲁夫(BALLUFF)微型断路器BES516-347-M0-C-03巴鲁夫(BALLUFF)微型断路器BES517-140-P5-H巴鲁夫(BALLUFF)微型断路器BESM12MI-PSC20B-S04G巴鲁夫(BALLUFF)微型断路器BESM12MI-PS0B-S04G巴鲁夫(BALLUFF)微型断路器BKS-S33M-00?巴鲁夫(BALLUFF)微型断路器BOS15K-S-E1-P-S75巴鲁夫(BALLUFF)微型断路器BRGB3-W AB12EP-P-R-K-SA8-0.3 巴鲁夫(BALLUFF)微型断路器BRGC5-W AP360-0P-G-0-SR巴鲁夫(BALLUFF)微型断路器BTL5-E10-M2000-B-S32巴鲁夫(BALLUFF)微型断路器BTL5-S173-M0206-P-S32巴鲁夫(BALLUFF)微型断路器dks-s20-2-05巴鲁夫(BALLUFF)微型断路器BES516-3005-E4-C-PU-05巴鲁夫(BALLUFF)微型断路器BES113-356-SA31-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S-135-S4-D 36V巴鲁夫(BALLUFF)微型断路器BES516-3021-G-E4-C-PU-02巴鲁夫(BALLUFF)微型断路器BES516-3022-G-E5巴鲁夫(BALLUFF)微型断路器BES516-325-G-S4-C巴鲁夫(BALLUFF)微型断路器BES516-325-S4-C巴鲁夫(BALLUFF)微型断路器BES516-362-S4-CW巴鲁夫(BALLUFF)微型断路器BES516-371-SA10-S4-003巴鲁夫(BALLUFF)传感器控制器BKS-S32M-C-00巴鲁夫(BALLUFF)电感式接近传感器BTL5-S173-M0350-B-S32 巴鲁夫(BALLUFF)电感式接近传感器BTL-P-1012-4R巴鲁夫(BALLUFF)光电开关BOS18M-PS-1XB-E5-C-S4巴鲁夫(BALLUFF)电感式接近传感器BRGB3-W AB12-EP-P-R-K-SA8-03。
BALLUFF直线位移传感器选型手册
系列
冲击负载 振动 极性反接保护 过电压保护 绝缘强度 外壳防护等级 符合 IEC 60529 外壳材料 安装方式 10.2 mm 不锈钢管耐压强度 8 mm 不锈钢管耐压强度 连接方式 电磁兼容性测试: 无线电放射干扰 (RF) 静电干扰 (ESD) 电磁场干扰 (RFI) 瞬间高速干扰脉冲 (BURST) 因高频场感应干扰引起的 线路噪声 标准额定检测长度 [mm] 直径8 mm金属管 检测长度至1016 mm
微脉冲位移 传感器
BTL5 杆型结构
一般数据 杆型结构
额定检测长度=检测区域 磁环
衰减区 (无效区)
螺纹 M18x1.5 安装面
额定检测长度=检测区域 磁环
螺孔 M4×4/6 深
衰减区 (无效区)
螺纹 3/4"x16 UNF 安装面
额定检测长度=检测区域
螺孔 M4×4/6 深
标准订货中包含 – 位移传感器 (从B.4 开始选取您所需的接口) – 简明用户手册
另请单独订购:
定位磁环 见 B.16 安装螺帽 见 B.16 浮子 见 B.17 插头 见 BKS.3
B.
系列
外壳 B BTL5_ _ _ _ -B-_ _ _ _ 公制安装螺纹 M18×1.5
B = 标准外壳
外壳 Z BTL5_ _ _ _ -Z-_ _ _ _ 3/4" UNF 安装螺纹
外壳 B8 BTL5_ _ _ _ -B8-_ _ _ _ 公制安装螺纹 M18×1.5 8 mm 直径金属杆 最大额定检测长度 1016 mm
外壳 Z8 BTL5_ _ _ _ -Z8-_ _ _ _ 3/4" UNF 安装螺纹 8 mm 直径金属杆 最大1016 mm 额定检测长度
BALLUF传感器(微脉冲位移传感器)_图文.
目录杆型结构微脉冲位移传感器接口系列冲击负载振动极性反接保护过电压保护绝缘强度外壳防护等级符合 IEC 60529外壳材料安装方式 0.2 mm 不锈钢管耐压强度8 mm 不锈钢管耐压强度连接方式电磁兼容性测试:无线电放射干扰 (RF静电干扰 (ESD电磁场干扰 (RFI瞬间高速干扰脉冲 (BURST因高频场感应干扰引起的线路噪声标准额定检测长度 [mm]直径8 mm 金属管检测长度至0 6 mm 一般数据杆型结构微脉冲位移传感器耐高压达 600 bar ,重复精度高非接触,坚固耐用BTL 微脉冲位移传感器是在严酷环境中经久耐用的位置反馈系统,检测范围从25到5500 mm 。
传感器的检测波导管安装在耐高压的不锈钢金属管中受到可靠的保护。
本系统非常适合于液压缸中的位置反馈或在食品化工领域中用于腐蚀性液体的液位控制。
标准订货中包含–位移传感器 (从B.4 开始选取您所需的接口–简明用户手册另请单独订购:定位磁环见 B. 6安装螺帽见 B. 6浮子见 B. 7插头见BKS.3B.2BTL5 杆型结构 00 g/6 ms 符合 IEC 60068-2-272 g, 0...2000 Hz 符合 IEC 60068-2-6有Transzorb 保护二极管500 V DC (外壳对地IP 67 (与防护等级为IP 67 的BKS-S...插头可靠连接时铝,经阳极氧化处理/ .457 不锈钢保护管, .3952 不锈钢精密铸造法兰盘外壳 B ,螺纹M 8× .5 ;外壳 Z , 3/4"-6UNF600 bar ,安装在液压缸中250 bar ,安装在液压缸中插头或电缆连接EN 550 第组,A 级IEC 6 000-4-2 ,锐度 3IEC 6 000-4-3 ,锐度 3IEC 6 000-4-4 ,锐度 4IEC 6 000-4-6 ,锐度 30025, 0050, 0075, 0 00, 0 25, 0 50, 0 75, 0200, 0225, 0250, 0275, 0300, 0325, 0350, 0375, 0400, 0425, 0450, 0475, 0500, 0550, 0600, 0650, 0700, 0750, 0800, 0850, 0900, 0950, 000, 00, 200, 300, 400, 500, 600, 700, 800, 900, 2000, 2250, 2500, 2750, 3000, 3250, 3500, 3750, 3850, 4000 或者以5 mm 步进订货,直至5500 mm (取决于步数系列BTL5杆型结构微脉冲位移传感器一般数据杆型结构模拟量接口杆型结构微脉冲位移传感器B.4标准订货中包含:–位移传感器–调节装置–简明用户手册另请单独订购:定位磁环见 B. 6安装螺帽见 B. 6 插头从BKS.3起00 % 量程范围内零点终点调节模拟信号的零点和终点可通过按压按键来调节。
巴鲁夫BTLI微脉冲位置传感器

K.H.1
Ex.4
Ex.6
Ex.8
i.3
巴鲁夫微脉冲直线位移传感 器是在严酷环境中应用的理 想选择。检测长度从25mm到 5500mm。
有多种输出信号形式可供选 择以匹配您的专用控制器。
此外,我们还提供带有多种 可编程功能的处理卡,为您 的控制器提供数字或模拟数 据信号。
滞后是到达并超过某一位 置,又以反方向从其他位置 返回该位置时所引起的信号 差异。
线性度
关断点
检测元件的线性度是一条线 性特征曲线。当输入值与输 出值之间的关系为一条直线 (一次函数)时,检测元件 的灵敏度恒定。线性范围在 X-Y轴平面内假定。当特征 曲线不是一条直线时为非线 性的。 非线性 非线性是围绕连接检测范围 的零点与终点的直线的最大 偏差量。 在位置(或检测点)与电 压、电流或数字量等输出信 号之间存在线性关系。磁致 伸缩传感器的线性度曲线在 系统使用寿命内保持不变, 并且,曲线能够被校正。
如果电路本身不产生会引燃 IIA, IIB 或IIC 组(测试环境满 足标准)爆炸环境的火花或 热效应,那么该电路被认为 是本质安全的。测试环境考 虑到正常的操作过程和某些 故障环境。 为了满足本质安全要求,对 电子和电气组件均有特定的 限制。 此外,相比普通的工业应 用,这里所使用的负载必须 减小: – 考虑到电压会影响绝缘常
i.5
装有微脉冲位 移传感器的液压缸
注塑机
挖掘机
i.6
切纸机
清洗机 装有微脉冲位 移传感器的液压缸
在危险环境中的定位 风力发电机
微脉冲位移传感器 应用
i
应用
巴鲁夫微脉冲位移传感器具 有在各种自动化和控制技术 领域应用的特点,甚至是在 极端恶劣的环境中。
Balluff_BTL_Series_Part_1_E_072009

BIW 750 mm
Micropulse 位移传感器 BIW –高性能, 长寿命和抽拉式机械兼容结构
BOD 6000 mm
光电测距传感器 BOD – 适合任何材料和颜色
BTL 5000 mm
BTL7 7600 mm
MICROPULSE 位移传感器 BTL– 特别坚固和可靠
BML 48000 mm
线性磁栅位移传感器BML – 高精度, 长距离位移检测
相比标准巴鲁夫 PROFIBUS MICROPULSE 传感器更加经济 可连接 4 个MICROPULSE M1 / P111接口的传感器到 PROFIBUS总线。 此外,还可以连接8个离散量传感器 个模拟量开关 (BNI PBS-552…)。 (BNI PBS-551…) 或 4
拥有BTL MICROPULSE 传感器的强大功能。 直接连接总线,效率更高。 IP 67 防护等级的完整解决方案。
BNI PBS-551-000-Z001
数字输入端口 针 1 2 功能 +24V / 1.0 A 数字输入
3
4 5
0V
数字输入 功能 GND FE
4
5
模拟输入 (电流)
功能GND FE
注意:
没有使用的输入端口必须使用端盖密封,保证IP67的防护等级
PROFIBUS BTL 总线连接器: 传感器针脚
数字脉冲接口方块图
各种数字脉冲接口:
I、K和L将很快停产, 对于新应用请不要 选用。
脉冲接口的高精度数字芯片
脉冲接口的高精度数字芯片 巴鲁夫数字芯片适合于自行开发控制和处理接口模块的厂商 可以同时处理4个磁块的位置信息 高分辨率 1µm
巴鲁夫 数字芯 片 44QFP
B巴鲁夫位移传感器-TL5-T1.0-M...-B-S103

Balluff GmbH P.O.Box 1160 73761 Neuhausen x (07158) 5010
Datenblatt by CD-ROM - 10/2004
STA Interface:T BTL5-T1.0-M...-B-S103
Micropulse transducer BTL
Technical Data
Output signal Transducer interface Input interface Profibus-Version Profibus-Interface System resolution position System resolution velocity Hysteresis Repeatability Sampling rate max.non-linearity Temperature coefficient of overall system Magnet traverse speed Supply voltage Current draw Operating temperature Storage temperature Address assignment Shock load Vibration Polarity reversal protected Overvoltage protection Dielectric constant Enclosure rating per IEC 60529 Housing material flange- and tube material Mounting Pressure rating Connection type recommended connector RF emission Static electricity (ESD) Electromagnetic fields (RFI) Fast transients (BURST) Line-carried noise, induced by high-frequency fields Cable length [m ] at Baud rate (kBit/s) Accessories PROFIBUS-DP T PROFIBUS-DP EN 50170, Encoder potential-free 5 µm increments configurable 0.1 mm/s increments configurable <=1 Digit ±1 Digit 1kHz ±30µm at 5 µm resolution (6µm +5ppm x L) /°C any 24 V DC ±20% <120mA -20...85°C -20...100°C mechanical switches and Master Class 2 100g / 6ms per IEC60068-2-27 12g, 10...2000 Hz per IEC 60068-2-6 yes Transzorb protection diodes 500 V (GND to housing) IP 67 (when BKS-S...IP 67 connector is in place) Anodized aluminum 1.4571 stainless tube, 1.3952 stainless investment cast flange thread M18 ×1,5,3/4"-16UNF on request 600 bar Connector BKS-S103-00 + BKS-S48 EN 55011 Group 1,Class A IEC 61000-4-2 Severity Level 3 IEC 61000-4-3 Severity Level 3 IEC 61000-4-4 Severity Level 4 IEC 61000-4-6 Severity Level 3 <100 <200 <400 <1000 <1200 12000 1500 900 187,5 93,7/19,2/9,6 Magnets and Connector please order separately
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T echnical Description User's GuideBalluff GmbH Schurwaldstrasse 973765 Neuhausen a.d.F. GermanyPhone +49 (0) 71 58/1 73-0 Fax +49 (0) 71 58/50 10E-Mail: balluff@balluff.de http://www.balluff.deRead this manual before installing and operating the Micropulse Trans-ducer.1.1Proper applicationThe BTL5 Micropulse transducer is intended to be installed in a ma-chine or system. Together with a controller (PLC) it comprises a posi-tion measuring system and may only be used for this purpose.Unauthorized modifications and non-permitted usage will result in the loss of warranty and liability claims.1.2Qualified personnelThis guide is intended for special-ized personnel who will perform the installation and setup of the system.1.3Use and inspectionThe relevant safety regulations must be followed when using the trans-1Safety Advisoryducer system. In particular, steps must be taken to ensure that should the transducer system become de-fective no hazards to persons or property can result. This includes the installation of additional safety limit switches, emergency shutoff switches and maintaining the per-missible ambient conditions.1.4ScopeThis guide applies to the model BTL5-A/C/E/G...A/B/Z... Micropulse transducer.An overview of the various models can be found in section 12 Versions (indicated on product label) on page 12.Note: For special versions, which are indicated by an -SA_ _ _ des-ignation in the part number, other technical data may apply (affect-ing calibration, wiring, dimensions etc.).The following patents have been granted in connection with this product:US Patent 5 923 164Apparatus and Method for Auto-matically Tuning the Gain of an AmplifierContents 1Safety Advisory.....................21.1Proper application..................21.2Qualified personnel ................21.3Use and inspection ................21.4Scope. (2)2Function andCharacteristics .....................32.1Characteristics .......................32.2Function .................................32.3Available stroke lengths andmagnets .................................33Installation ............................33.1Mounting................................33.2Transducer, Installation...........43.3Magnets, Installation ..............54Wiring ....................................55Startup...................................65.1Check connections ................65.2Turning on the system............65.3Check output values ..............65.4Check functionality ................65.5Fault conditions......................66Calibration procedure ..........66.1Selecting calibration mode.....76.2Teach-in..................................76.3Manual adjust.........................76.4Reset......................................76.5Online-setting.........................77Teach-in mode ......................88Manual adjust mode............99Resetting all values(Reset) (1010)Online-setting mode (11)11Technical Data ....................1211.1Dimensions, weights,ambient conditions...............1211.2Supply voltage (external)......1211.3Outputs ................................1211.4Connection to controller.......1211.5Included in shipment............1211.6Magnets ...............................1211.7Accessories (optional). (1212)Versions (indicated onproduct label) (12)UL authorization File No.E2272562.1CharacteristicsMicropulse transducers feature:–Very high resolution, repeatability and linearity–Immunity to shock, vibration,contamination and electrical noise –An absolute output signal –Automatic signal regulation –100 % adjusting range–Removable calibration device – 2 kHz update rate–Error information via output signal –Pressure rated to 600 bar –IP 67 per IEC 605292.2FunctionThe transducer contains a tubular waveguide enclosed by an outer stainless steel rod. A magnet at-tached to the moving member of the machine or to the cylinder pis-ton is moved over the rod and its position constantly updated.The magnet defines the measured position on the waveguide. An inter-nally generated INIT pulse interacts with the magnetic field of the mag-net to generate a magnetostrictive torsional wave in the waveguide which propagates at ultrasonic speed.The torsional wave arriving at the end of the waveguide is absorbed in the damping zone. The wave arriv-ing at the beginning of the wave-guide creates an electrical signal in the coil surrounding the waveguide.The propagation time of the wave is used to derive the position. Depend-ing on the version the corresponding value is output as a voltage or a cur-rent either with rising or falling char-acteristic. This process takes place with measuring high precision and repeatability within the stroke range defined as nominal stroke length.At the rod end is a damping zone,within which no reliable signal is available, but which may be entered by the magnet.The electrical connection between the transducer, the processor/con-troller and the power supply is via a cable, which depending on the ver-sion is either fixed or connected using a female connector.2Function and Characteristics Dimensions for installing theMicropulse transducer: ➥ Fig. 3-2Dimensions for installing the mag-net: ➥ Fig. 3-42.3Available stroke lengths and magnetsTo ensure flexible application, nomi-nal transducer stroke lengths of from 50 to 4000 mm and various types of magnets are available.Magnets therefore need to be or-dered separately.3Installation 3.1MountingWhen possible, use non-magnetiz-able material for attaching the trans-ducer and magnet ring. ➥ Fig. 3-1.When attaching the transducer to magnetizable materials, appro-priate measures must be taken to protect against magnetic disturb-ances ➥ Fig. 3-1. Note the recommended distance of the transducer and cylinder from strong, external magnetic fields.Fig. 3-1: Mounting➀ - ➂ for magnetizable materials ➃ for non-magnetizable materials a =Spacer made of non-mag-netizable materials b =Magnet3Installation (cont.)Fig. 3-2: Transducer BTL5...A/B/Z, Dimensions 3.2Transducer, InstallationThe smallest permissible distance between magnet ring and rod mounting surface is shown in Fig. 3-2.The transducer has either aM18×1.5 thread or a 3/4"-16UNF thread for mounting. The sealing is carried out with the O-ring supplied at the flange facing.Important Installation Notes:The contact surface of the trans-ducer must be completely con-tacted by the mounting surface.The O-ring supplied must make a perfect pressure seal, i.e. the bevel for the O-ring must be configured exactly as shown in Fig. 3-3.To achieve secure mounting, use the proper nut for the mounting thread. When tightening the nut, do cylinder rod should be at least 13 mm.When attaching the transducer to magnetizable materials, appropriate measures must be taken to protect against magnetic disturbances,➥ Fig. 3-1.Note the recommended distance of the transducer and cylinder from strong, external magnetic fields.Fig. 3-3: Threaded hole for mounting the BTL with O-ringThreaded hole M18×1.5 per ISO 6149O-ring 15.4 × 2.1Threaded hole 3/4"-16UNF per SAE J475O-ring 15.3 × 2.4not exceed a tightening torque of 100 Nm.For horizontal mounting of trans-ducer with stroke lengths greater than 500 mm, the pressure tube should be supported or attached at its end.When installing in a hydraulic cylin-der, do not allow the magnet ring to rub against the pressure tube. The bore diameter in the piston andWhen routing the cable between the transducer, controller and power supply, avoid proximity to high volt-age lines to prevent noise coupling.Especially critical is inductive noise caused by AC harmonics (e.g. from phase-control devices), againstwhich the cable shield provides only limited protection.Cable length max. 20 m; Ø 6 to 8 mm. Longer lengths may be used if construction, shielding and routing are such that external noise fields will have no effect on signal integrity.BKS connector, view towards solder side of female BKS-S 32M-00or BKS-S 33M-00Fig. 4-2: Pin assignments BKS,connector type BTLFig. 4-3: Connector (optional)3Installation (cont.)Fig. 3-4: Magnet (optional)BTL-P-1013-4R3.3Magnets, InstallationA magnet is required for each trans-ducer. This must be ordered sepa-rately. ➥ Fig. 3-4.For mounting the magnet we rec-ommend to use non-magnetizable material. ➥Fig. 3-1.BTL-P-1013-4SBTL-P-1012-4RBild 4-1: BTL5-A11...KA_ _ with controller, wiring example6Calibration procedurePlease note:The calibration device is to be at-tached to the connection end of the transducer as shown in ➥ Fig. 6-1. Connect the trans-ducer to the controller. To monitor the calibration procedure, a dis-play (controller or multimeter)which displays the BTL voltage or current levels is required. All set-tings are done with a magnet within the stroke area.Please verify that the absolute null- and endpoints are always within the maximum and mini-mum possible output values (➥ value table 7-1 on page 8).The buttons are automatically dis-abled after approximately 10 min-utes of non-use.Advantages:The display will always indicate the current position value even during the calibration procedure.The last programmed values re-main stored, regardless of whether the programming mode is ended manually by pressing the buttons or automatically after 10 minutes.4Wiring (cont.)Any desired magnet position within the factory set nominal stroke length can be assigned with a null- or endpoint. Do not however reverse the null- and endpoints.Once the calibration procedure is concluded, the calibration device can be removed to prevent acci-dental changes and to store in a safe place for the next use.The examples shown in this hand-book refer to the two versions with 0 to 10 V and 4 to 20 mA outputs.For all other versions the corre-sponding values can be found in the ➥ value table 7-1 on page 8.5Startup5.1Check connectionsAlthough the connections are polar-ity reversal protected, components can be damaged by improper con-nections and overvoltage. Before you apply power, check the connec-tions carefully.5.2Turning on the systemNote that the system may execute uncontrolled movements when first turned on or when the transducer is part of a closed-loop system whose parameters have not yet been set.Therefore make sure that no haz-ards could result from these situa-tions.5.3Check output valuesAfter replacing or repairing a trans-ducer, it is advisable to verify the values for the start and end position of the magnet in manual mode. If values other* than those present before the replacement or repair are found, a correction should be made.*Transducers are subject to modifi-cation or manufacturing tolerances.5.4Check functionalityThe functionality of the transducer system and all its associated com-ponents should be regularly checked and recorded.5.5Fault conditionsWhen there is evidence that the transducer system is not operating properly, it should be taken out of service and guarded against unau-thorized use.Output signals Pin Cable BTL5-A_1-C_0-C_7-E_0-E_7-G_11YE yellow not used ➀0...20 mA20...0 mA 4...20 mA20...4 mAnot used ➀ 2GY gray 0 V 3PK pink 10...0 V not used ➀10...–10 V 4not used 5GN green0...10 Vnot used ➀–10...10 V➀ Unused leads can be tied toGND on the control side, but theymust never be connected to the shield.➁ Reference GND for supply voltage and EMC!Supply voltage (external)Pin Cable BTL5-A/C/E/G1_BTL5-A/C/E/G2_ 6BU blue GND ➁GND ➁ 7BN brown +24 V +15 V 8WH white do not connect –15 VTable 4-1: Wiring6Calibration procedure (cont.)Fig. 6-4: Manual adjust procedure6.4ResetThe reset function can be used to restore the transducer to its factory default settings.➥ Section 9 Resetting all values (Reset)6.5Online-settingSetting the start and end values is done while the system is running.➥ Section 10 Online setting mode6.3Manual adjustThis method allows you to set a new start and/or end value. This may be useful if the magnet can not be brought to the null or end point of the transducer.6.1Selecting calibration modeSystem not running:Depending on the application use either Teach-in or manual adjust.System running:In special situations the online set-ting mode may be used.6.2Teach-inThe factory-set null- and endpoints will be replaced by the new null-and endpoints. First move the mag-net to the new null position, then to the new end position, and press the buttons to accept the correspond-ing value.➥ Section 7 Teach-in modeFig. 6-1: Calibration device (shown on transducer)1st step: Move magnet to new New stroke 100 %Fig. 6-3: Teach-in procedure Move magnet to new desired point/1+ 2Fig. 6-2: Selecting calibration modeOnline-Online-To do this, the magnet is brought alternately to the new start and end position, and the displayed values are adjusted by keystroke or press-ing the buttons until the desired values are reached.➥ Section 8 Manual adjust mode7Teach-in mode/Enable buttons:1.Press one of the buttons for at least 3 s. Release button.2.Within 1 s hold down buttons 1+2simultaneously for at least 3 s.Now the Error value remains stored as the output signal.In case of an error or a break in the activation sequence of but-tons, wait for the duration of pro-tection time of 12 s before start-ing the sequence anew.Select teach-in:Hold down button 1 for at least 2 s until the code for teach-in is dis-played. Release button. Der aktuelle Positionswert wird angezeigt.Set nullpoint:1.Move magnet to exact desired nullpoint.2.Hold down button 1 for at least 2 s. The new nullpoint is set.Set end point:3.Move magnet to exact desired end point.4.Hold down button 2 for at least 2 s. The new end point is set.End teach-inand disable buttons:Hold down buttons 1+2 simulta-neously for at least 6 s to end the calibration procedure until the Error value is displayed. Then press one of the buttons briefly to disable both buttons.Check your new settings carefully before you start up the machine or system.BTL5-A... with magnet in stroke range/8Manual adjust modeEnable buttons:1.Press one of the buttons for at least 3 s. Release button.2.Within 1 s hold down buttons 1+2simultaneously for at least 3 s. Now the Error value remains stored as the output signal.Select adjust:Hold down button 2 for at least 2 s until the code for manual adjust is displayed. Release button. The cur-rent position value is displayed.Adjust start value:1.Move magnet to exact start posi-tion.2.Hold down button 1 for at least 2 s.3.Shift null point (=start value) to-wards flange or rod end with con-stant slope: Briefly pressing the buttons increases or decreases the actual value by approx. 1 mV or 2µA. Holding a button down for longer than 1 s increases the step size.4.Exit calibration procedure for the start value: Press buttons 1+2 less than 2 s.Adjust end value:5.Move magnet to exact end posi-tion.6.Hold down button 2 for at least 2 s.7.Increase or reduce slope: Briefly pressing the buttons increases or decreases the actual value by approx. 1 mV or 2 µA. Holding a button down for longer than 1 s increases the step size.8.Exit calibration procedure for the end value: Press buttons 1+2 less than 2 s.Additional notes:Setting the end value (i.e. the slope)and the start value can mutually affect each other depending on the stroke position. You will need to repeat steps 1 to 8 over until the start and end values agree with their respective desired values.End adjustment, disable buttons:Hold down buttons 1+2 simulta-neously for at least 6 s to end the calibration procedure until the Error value is displayed. Then press one of the buttons briefly (<1 s) to dis-able both buttons.Check your settings carefully be-fore starting up the system.BTL5-A... with magnet in stroke range9Resetting all values (Reset) If an existing configuration needs to be deleted, all values can be re-stored to the original factory set-tings (Reset).Activate buttons:1.Press one of the buttons for atleast 3 s. Release button.2.Within 1 s hold down buttons 1+2simultaneously for at least 3 s. Now the Error value remains stored asthe output signal.If an error occurs or there is an interruption while activating a button, please wait for an addi-tional 12 s before starting over. Perform reset:3.Hold down both buttons for at least6 s. The Null value is displayed, andthe reset has taken place.4.Release buttons. The current posi-tion value is displayed and thebuttons are again deactivated.The transducer is ready for new calibration./1+ 210Online-setting modeThe BTL output signal at a particu-lar magnet position is set to the desired value which is then stored by the controller as a start or end value without having to power down the entire system. For this reason the safety advisory at right should be especially noted.Setting start value online:1.Position system so that the mag-net ring is located at the start posi-tion.2.Activate buttons:Hold button 1 down for at least 3 s and then – without releasing but-ton 1 – hold both buttons down for at least 3 s.3.Setting the value:Briefly pressing the buttons in-creases or decreases the actual value by approx. 1 mV or 2 µA.Holding a button down for longer than 1 s increases the step size.4.Once the adjustment range or the desired start value is reached, the setup mode is automatically exited if no button is pressed for at least 15 s. The buttons are again dis-abled. Another adjustment proce-dure can be carried out.Setting end value online:1.Position system so that the mag-net ring is located at the end posi-tion.2.Activate buttons:Hold button 2 down for at least 3 s and then - without releasing but-ton 2 - hold both buttons down for at least 3 s.3.Setting the value:Briefly pressing the buttons in-creases or decreases the actual value by approx. 1 mV or 2 µA.Holding a button down for longer than 1 s increases the step size.4.Once the adjustment range or the desired end value is reached, the setup mode is automatically exited if no button is pressed for at least 15 s. The buttons are again dis-abled. Another adjustment proce-dure can be carried out.BTL5-... with magnet at end of strokeBTL5-... with magnet in start positionResolution +Hysteresis =Repeatability Voltage 0.3 mV Current 0.6 µA Minimum 0.05 mm Sampling rate f Standard = 2 kHz Non-linearityNom. length < 500mm > 500 mm in µm ±100 ±0.02 % FS Temperature coefficient Voltage output:[150 µV/K + (5 ppm/K * P * V/NL)] * ∆TCurrent output:[0,6 µA/K + (10 ppm/K * P * I/NL)] * ∆T V = output voltage range in [V]I = output current range in [mA]NL = nominal length in [mm]∆T = temperature coefficient in [K]P = magnet position in [mm]Shock 100 g/6 ms per IEC 60068-2-27 1Continuous shock 100 g/2 ms per IEC 60068-2-29 1Vibration 12 g, 10 to 2000 Hz per IEC 60068-2-6 1(take care to avoid inherent reso-nances of protective tube)Pressure up to 600 bar when installed in a hydraulic cylinder1Individual specifications as per Balluff factory standard11.1Dimensions, weights,ambient conditionsNominal length< 4000 mm Dimensions ➥ Fig. 3-2Weight ca. 2 kg/m Housing anodized aluminum Pressure tube Stainless steel 1.4571diameter 10.2 mm wall thickness 2 mm e-modulus ca. 200 kN/mm 2Mounting thread M18×1.5 or3/4"-16UNFOperating temp.–40 °C to +85 °C Humidity < 90 %, non-dewing Protection rating per IEC 60529IP 67with connector attached 11.2Supply voltage (external)Regulated supply voltage BTL5-_1... DC 20 to 28 VRipple< 0.5 V pp BTL5-_2... DC ±14.7 to ±15.3 VCurrent draw< 150 mA Inrush< 3 A/0.5 ms Polarity reversal protection built-in Overvoltage protection Transzorb diodes Electric strengthGND to housing 500 V11.3OutputsBTL5-A...Output voltage 0...10/10...0 V Load current < 5 mA Ripple < 5 mVBTL5-G...Output voltage –10...10/10... –10 V Load current < 5 mA Ripple < 5 mVBTL5-C...Output current 0...20/20...0 mA Load resistance < 500 Ohm BTL5-E...Output current 4...20/20...4 mA Load resistance < 500 Ohm11.4Connection to controllerAnalog interface:With S32 connector for shielded cable (max. length, see "Wiring"),diameter 6 to 8 mm, or with integral cable (5 m long)11.5Included in shipmentTransducer➥ Fig. 3-2Calibration device ➥ Fig. 6-111.6Magnets(order separately)Magnets BTL-P-1013-4R,BTL-P-1013-4S, BTL-P-1012-4RDimensions➥ Fig. 3-4Weight approx. 10 g Housing anodized aluminum Operating temp.–40 °C to +85 °C Included:8 mm spacerMaterial POM (polyoxymethylene)Magnets BTL5-P-4500-1(Electromagnet)Weight approx. 90 g Housing plasticOperating temp.–40 °C to +60 °C 11.7Accessories (optional)Connectors➥ Fig. 4-3N o . 811 817 E • E d i t i o n 0309; s p e c i f i c a t i o n s s u b j e c t t o c h a n g e s • R e p l a c e s e d i t i o n 0110.12Versions (indicated on product label)Supply voltage : 1 = DC 24 V, 2 = DC ±15 VElectr. connection ,S 32: with connector,BTL5-A11-M0450-B-S 32KA05: with 5 m cableRod Style ,Mounting :A =metric thread M18×1.5B =metric thread M18×1.5Z =thread 3/4"-16UNFNom. length (4digits):M = metric in mmAnalog interface:Voltage output A_1 = 10 ... 0 V and 0 ... 10 VG_1 = 10 ... –10 V and –10 ... 10 VCurrent output C_0 = 0 ... 20 mA E_0 = 4 ... 20 mAC_7 = 20 ... 0 mA E_7 = 20 ... 4 mAM i c r o p u l s e L i n e a r T r a n s d u c e r11Technical DataTypical values at DC 24 V and 25 °C. Ready for operation at once, full accuracy after warm-up. With magnet BTL-P-1013-4R, BTL-P-1013-4S or BTL-P-1012-4R:。