巴鲁夫微脉冲位移传感器
巴鲁夫传感器资料 B K S

PUR 黄铜 0.8 µm 镀金
IP 68 黄铜 2.5 µm 镀镍 氟橡胶 121 Ω
A 2
5×0.34 mm2/AWG 22 IP 67 黄铜
2.5 µm 镀镍 氟橡胶
A 1/2 请在订货编号中标明电
缆长度!
02 = 长度 2 m 05 = 长度 5 m 10 = 长度 10 m
BKS
插头用于模拟量、 数字脉冲和 SSI接口 插头, T型分路器, 终端电阻, 用于CANopen 与DeviceNet接口 插头终端电阻, 用于PROFIBUSDP接口 插头 用于BTL5-F系列 外壳突出结构 A1系列
5芯, 母
BKS-S105-CP-_ _ BTL5-T1...-S103
5芯, 公
微脉冲位移 传感器
BKS-S 105-R01 BTL5-T1...-S103
终端电阻,公
插头和附件 用于PROFIBUS-DP
BKS-S 48-15-CP-_ _ BTL5-T1...-S103 供电电源 3芯, 母
BKS-S103/GS103-CP-_ _
PUR 黄铜 0.8 µm 镀金
BKS-S151-19-PC-...
PUR 黄铜 0.8 µm 镀金
IP 67 黄铜 2.5 µm 镀镍 HBR
A 1* *仅适用于 BTL5-H1...-M-P/B-S92
5×0.25 mm2 IP 67 黄铜
2.5 µm 镀镍 氟橡胶
5×0.25 mm2 IP 67 黄铜
PG 9 6...8 mm
PG 9 6...8 mm
IP 67 (可靠连接时) IP 67 (可靠连接时) IP 67 (可靠连接时) IP 67 (可靠连接时)
B
德国BALLUFF巴鲁夫位移传感器工作原理巴鲁夫位移传感器具有无

德国BALLUFF巴鲁夫位移传感器工作原理巴鲁夫位移传感器具有无滑动触点,工作时不受灰尘等非金属因素的影响,并且低功耗,长寿命,可使用在各种恶劣条件下。
位移传感器主要应用在自动化装备生产线对模拟量的智能控制。
位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。
小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。
其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用。
巴鲁夫位移传感器的功能在于把直线机械位移量转换成电信号。
为了达到这一效果,通常将可变电阻滑轨定置在传感器的固定部位,通过滑片在滑轨上的位移来测量不同的阻值。
传感器滑轨连接稳态直流电压,允许流过微安培的小电流,滑片和始端之间的电压,与滑片移动的长度成正比。
将传感器用作分压器可最大限度降低对滑轨总阻值精确性的要求,因为由温度变化引起的阻值变化不会影响到测量结果。
德国BALLUFF巴鲁夫位移传感器工作原理产品优势:高分辨率、高重复性和高线性抗震动、抗干扰场探测液压驱动装置 (如风力发电设备) 的活塞位置监测注塑机或加工中心内的线性运动监控配料及混合单元内的料位德国BALLUFF巴鲁夫位移传感器部分产品型号:BTL0E1E BTL5-S171B-M0200-P-S32BTL0E30 BTL5-S172B-M1000-P-S32BTL0EM1 BTL5-S177B-M0225-P-KA05BTL0EWY BTL5-S112B-M0500-P-S32BTL0H8Y BTL5-S112B-M0300-P-S32BTL0HA1 BTL5-S112B-M1125-P-S32BTL0HA3 BTL5-S112B-M1535-P-S32BTL0HA4 BTL5-S112B-M1625-P-S32BTL0J0Y BTL5-S162-M4500-P-SA303-S32BTL0JR6 BTL5-S186-M2150-P-S32BTL0K2Z BTL5-S113B-M0250-P-S32BTL0L78 BTL5-S101B-M0300-P-S32BTL0LWK BTL5-S171B-M1500-P-SA244-S32BTL0M5C BTL5-S171B-M2000-P-S32德国BALLUFF巴鲁夫位移传感器工作原理BTL0N5E BTL5-S163-M2250-P-S32BTL0NPM BTL5-S113B-M2300-P-S32BTL0NRC BTL5-S101-M0600-P-SA243-S32BTL0P0L BTL5-S171B-M0900-P-KA15BTL0P10 BTL5-S111B-M0500-P-KA05SET00AA BTL5-S114-M0600-P-S32/KRUPP KAUTEX BTL00KJ BTL5-T110-M0450-P-S103BTL00NZ BTL5-T110-M0900-P-S103BTL00TL BTL5-T110-M0050-P-S103BTL00ZZ BTL5-T110-M0750-P-S103BTL0100 BTL5-T110-M1750-P-S103BTL0100 BTL5-T110-M1750-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL0137 BTL5-T110-M1000-P-S103BTL01N4 BTL5-T110-M0550-P-S103BTL01N8 BTL5-T110-M0175-P-S103BTL01RU BTL5-T110-M0400-P-S103BTL0284 BTL5-T110-M0100-P-S103BTL028J BTL5-T120-M1000-P-S103BTL02C4 BTL5-T110-M0130-P-S103BTL03A3 BTL5-T110-M0350-P-S103BTL03H0 BTL5-T110-M0150-P-S103BTL03H2 BTL5-T110-M0200-P-S103BTL03H3 BTL5-T110-M0225-P-S103BTL03H5 BTL5-T110-M0250-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03H9 BTL5-T110-M0300-P-S103BTL03HA BTL5-T110-M0300-P-SA268-S103BTL03HF BTL5-T110-M0400-P-SA160-S103BTL03HJ BTL5-T110-M0500-P-S103BTL03HM BTL5-T110-M0600-P-S103BTL03HP BTL5-T110-M0650-P-S103BTL03HT BTL5-T110-M0700-P-S103BTL03HW BTL5-T110-M0800-P-S103BTL03HZ BTL5-T110-M1400-P-S103BTL03J0 BTL5-T110-M1600-P-S103BTL03J1 BTL5-T110-M2000-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03J1 BTL5-T110-M2000-P-S103BTL03J2 BTL5-T110-M2050-P-S103BTL03J3 BTL5-T110-M2100-P-S103BTL03J4 BTL5-T110-M2150-P-S103BTL03J4 BTL5-T110-M2150-P-S103BTL03J5 BTL5-T110-M2200-P-S103BTL03J7 BTL5-T110-M3100-P-S103BTL03J9 BTL5-T120-M0700-P-S103BTL03JC BTL5-T120-M1750-P-S103BTL03JF BTL5-T120-M2000-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03JH BTL5-T120-M2250-P-S103BTL08R2 BTL5-T110-M1250-P-S103BTL09AL BTL5-T120-M4250-P-SA303-S103 BTL0JJ6 BTL5-T120-M2100-P-S103BTL0K77 BTL5-T110-M0930-P-S103BTL0K8F BTL5-T110-M4500-P-SA303-S103 BTL0N5C BTL5-T110-M2400-P-S103BTL5-T110-M0500-P-S103 (V2)BTL5-T110-M1800-P-S103 (V2)BTL5-T110-M0250-B-S103 (V2)BTL0469 BTL5-Q5020-M0508-P-S140BTL046K BTL5-Q5021-M0457-P-S140德国BALLUFF巴鲁夫位移传感器工作原理BTL049C BTL5-Q5222-M0203-P-S140BTL049E BTL5-Q5222-M1000-P-S140BTL049H BTL5-Q5231-M0051-P-S140BTL049K BTL5-Q5231-M0407-P-S140BTL04C4 BTL5-Q5621-M0077-P-S140BTL04C9 BTL5-Q5631-M0203-P-S140BTL04EF BTL5-Q5654-M0305-P-S140BTL00Z5 BTL5-D112-M0350-P-S93BTL03AM BTL5-D112-M0050-P-S93BTL03AN BTL5-D112-M0150-P-S93BTL03AP BTL5-D112-M0175-P-S93德国BALLUFF巴鲁夫位移传感器工作原理BTL03AR BTL5-D112-M0200-P-S93BTL03AT BTL5-D112-M0250-P-S93BTL03AU BTL5-D112-M0300-P-S93BTL03AW BTL5-D112-M0400-P-S93BTL03AY BTL5-D112-M0450-P-S93BTL03AZ BTL5-D112-M0600-P-S93BTL03C0 BTL5-D112-M0650-P-S93BTL03C1 BTL5-D112-M0700-P-S93BTL03C2 BTL5-D112-M0850-P-S93BTL03C2 BTL5-D112-M0850-P-S93BTL03C3 BTL5-D112-M1000-P-S93德国BALLUFF巴鲁夫位移传感器工作原理BTL03C4 BTL5-D112-M1200-P-S93BTL03C5 BTL5-D112-M1250-P-S93BTL03C6 BTL5-D112-M1500-P-S93BTL03C6 BTL5-D112-M1500-P-S93BTL03C7 BTL5-D112-M1600-P-S93BTL03C8 BTL5-D112-M1900-P-S93BTL03C9 BTL5-D112-M3250-P-S93BTL03CA BTL5-D114-M0500-P-S93BTL03CC BTL5-D114-M1200-P-S93BTL0CAH BTL5-D112-M1950-P-S93BTL0E91 BTL5-D112-M0500-P-S93BTL0JN1 BTL7-E170-M0075-B-NEX-S32 BTL00MR BTL5-A11-M0300-B-KA05BTL0150 BTL5-A11-M0300-B-S32BTL015U BTL5-A11-M0050-B-S32BTL015Y BTL5-A11-M0100-B-KA05BTL015Z BTL5-A11-M0100-B-S32BTL0160 BTL5-A11-M0120-B-SA225-KA01 BTL0161 BTL5-A11-M0125-B-S32BTL0162 BTL5-A11-M0150-B-S32BTL0163 BTL5-A11-M0175-B-KA05BTL0164 BTL5-A11-M0175-B-S32BTL0166 BTL5-A11-M0200-B-S32BTL0167 BTL5-A11-M0200-B-SA42-KA05 BTL0168 BTL5-A11-M0225-B-S32BTL0169 BTL5-A11-M0250-B-S32BTL016A BTL5-A11-M0275-B-S32BTL016E BTL5-A11-M0290-B-SA225-KA01 BTL016F BTL5-A11-M0300-B-SA56-S32 BTL016L BTL5-A11-M0340-B-SA56-S32 BTL016M BTL5-A11-M0350-B-S32BTL016P BTL5-A11-M0400-B-S32BTL016T BTL5-A11-M0450-B-S32BTL016U BTL5-A11-M0500-B-S32BTL016Z BTL5-A11-M0500-B-SA56-S32 BTL0170 BTL5-A11-M0550-B-S32BTL0171 BTL5-A11-M0580-B-SA56-S32 BTL0172 BTL5-A11-M0600-B-S32BTL0174 BTL5-A11-M0650-B-S32BTL0175 BTL5-A11-M0650-B-SA56-S32BTL0177 BTL5-A11-M0750-B-S32BTL0178 BTL5-A11-M0800-B-S32BTL0179 BTL5-A11-M0800-B-SA56-S32 BTL017A BTL5-A11-M0900-B-S32BTL017C BTL5-A11-M1000-B-S32BTL017E BTL5-A11-M1100-B-S32BTL017H BTL5-A11-M1500-B-S32BTL017K BTL5-A11-M4200-B-S32BTL017L BTL5-A11-M4300-B-S32BTL017M BTL5-A11-M4450-B-S32BTL0313 BTL5-A11-M0030-B-S32BTL0C83 BTL5-A11-M0325-B-S32BTL0F7U BTL5-A11-M2750-B-S32BTL0FNP BTL5-A11-M0400-B-KA05BTL0FNR BTL5-A11-M1800-B-KA05BTL0FNT BTL5-A11-M4000-B-S32BTL0L66 BTL5-A11-M0960-B-SA56-S32 BTL0NM7 BTL5-A11-M1535-B-S32BTL017U BTL5-C10-M0350-B-S32BTL017W BTL5-C17-M0100-B-S32BTL017Y BTL5-C17-M0750-B-KA05BTL017Z BTL5-C17-M0750-B-S32BTL0180 BTL5-C17-M0750-B-SA182-KA05 德国BALLUFF巴鲁夫位移传感器工作原理。
巴鲁夫 BTL5-B系列位移传感器

Contents Rod seriesMicropulse TransducersB.2General data B.4Analog interface B.6Digitalpulse interface B.8SSD interfaceB.10CANopen interface B.12PROFIBUS-DP interface B.14Magnets and floatsB.16Installation notes B.18Special seriesBTL5 Rod-style100 g/6 ms per IEC 60068-2-2712 g, 10...2000 Hz per IEC 60068-2-6yesTranszorb protection diodes 500 V (GND to housing)IP 67 (when BKS-S... IP 67 connector is in place)Anodized aluminum/1.4571 stainless tube,1.3952 stainless investment cast flange thread M18×1,5, 3/4"-16UNF on request 600 bar installed in hydraulic cylinderconnector or integral cableEN 55011 Group 1, Class A IEC 61000-4-2 Severity Level 3IEC 61000-4-3 Severity Level 3IEC 61000-4-4 Severity Level 4IEC 61000-4-6 Severity Level 30025, 0050, 0075, 0100, 0125, 0150, 0175, 0200, 0225, 0250, 0275, 0300, 0325, 0350, 0375, 0400, 0425, 0450, 0475, 0500, 0550, 0600, 0650, 0700, 0750, 0800, 0850, 0900, 0950, 1000, 1100, 1200, 1300, 1400, 1500, 1600, 1700, 1800, 1900, 2000, 2250, 2500, 2750, 3000, 3250, 3500, 3750, 3850, 4000 or in 5-mm increments on requestSeriesShock load VibrationPolarity reversal protected Overvoltage protection Dielectric strengthEnclosure rating per IEC 60529Housing materialMountingPressure rating Connection type EMC testings:RF emissionStatic electricity (ESD)Electromagnetic fields (RFI)Fast transients (BURST)Line-carried noise,induced by high-frequency fieldsStandard nominal strokes [mm]General Data Rod SeriesMicropulse Transducers Pressure rated to 600 bar,high repeatability,non-contact, rugged The BTL Micropulse trans-ducer is the rugged position feedback system for use under extreme ambient conditions measuringbetween 25 and 4000 mm.The actual waveguide is protected inside a high-pressure resistant stainless steel tube. The system is ideal for use in hydraulic cylinders for position feedback or as a level monitor with aggressive media in the food andchemical industries.B.2Included–Transducer (select your interface starting page B.4)–Jam nuts M18×1.5–User's manual▼Please order separately:Magnets page B.14Floats page B.15Connectors starting page BKS.3Micropulse TransducersGeneral Data Rod Serieshttp://www.balluff.deAnalog interface Rod seriesMicropulse Transducers B.4Included:–Transducer –Jam nut–Calibration device 112774–User's guide Please order separately:Magnets page B.14Connectorsstarting page BKS.3▼100 % Null- and endpoint calibrationNull and endpoint of theanalog signal can be button-set to the desired position.Depending on theapplication, teach-in or adjust mode is used,selectable by pressing a button combination.Teach-inUsed for changing thefactory set null and end point with a new null and end point. First the magnet must be brought to the new null point and then to the new end position, and therespective values stored by pressing the button.AdjustHere you can adjust to a new start and end value.This may be required when you cannot physically move the magnet to the standard null and/or end point.Move the magnet to the new start and end position, and adjust the displayed value by pressing the button until the desired output values are reached.Select calibration method1. Place magnet in new null position.Procedure for teach-in,rising signalFeatures of Micropulse BTL5-A/C/E/G...B –100 % adjustment of analog signal– 3 calibration modes:Teach-in, adjustment for null and end point, and online setting–Electronics head can be replaced if needed –Short housing –Error signal:No magnet in measuring area,transducer in calibration modeOnline settingThis programming function allows you to set the null and end point while in run mode, such as in a closed loop configuration. During the calibration procedure no error signal is output, so that no uncontrolledmovement of the hydraulics can occur.The calibration range is limited to ± 12.5 %.before afterCalibration device 115379BTL5-A-EH01Please enter code for output signal, nominal stroke and connection type in ordering code!Preferred models Interfaces A11 and E10 BTL5-A11-M_ _ _ _-B-S 32, BTL5-E10-M_ _ _ _-B-S 32 marked in blue are available from stock.Analog interfaceRod seriesMicropulseTransducers0025, 0050, 0075, 0100, 0125,0150, 0175, 0200, 0225, 0250,0275, 0300, 0325, 0350, 0375,0400, 0425, 0450, 0475, 0500,0550, 0600, 0650, 0700, 0750,0800, 0850, 0900, 0950, 1000,1100, 1200, 1300, 1400, 1500,1600, 1700, 1800, 1900, 2000,2250, 2500, 2750, 3000, 3250,3500, 3750, 3850, 4000 or in5-mm increments on request.1risingand falling(for A and G)0rising7falling(for C and E)BTL5-E1_-M_ _ _ _-B-_ _ _ _OutputsignalStandardnominal strokes [mm]Ordering example:S 32ConnectorKA02PUR cable 2 mKA05PUR cable 5 mKA10PUR cable 10 mKA15PUR cable 15 mConnection type100 % stroke adjustment ▼▼http://www.balluff.deASIC INFO: +49 (0) 71 58/1 73-2 41Micropulse Transducers B.6P-InterfaceCompatible with BTAothers.BTL, is assured by the electronics can create ahighly accurate P-interface cost effectively and with a minimum of effort using theBalluff digitizing chip. The digitizing chip was deve-loped as a high-resolution,configurable ASIC for the Micropulse P-interface.44QFP digitizing chip CPU-controller4/8Bit-BUS5 VOsz.INITMicropulse transducer with 1 to 4 magnetsController or processing electronicsP-pulse outputBenefits–High resolution:the 1 µm actual resolution of the BTL transducer is fully supported by the 5 µmresolution of the chip (at low clock frequency 2 or 20 MHz)–Position data from4 magnets can be processed simultaneously–4/8-bit processor interfaceDigital pulse interface Rod seriesMicropulse Transducers Ordering example:BTL5-P1-M_ _ _ _-B-_ _ _ _Standardnominal strokes [mm]Included:–Transducer –Jam nut–User's manualPlease order separately:Magnets page B.14Connectors starting page BKS.3▼0275, 0300, 0325, 0350, 0375,0800, 0850, 0900, 0950, 1000,1100, 1200, 1300, 1400, 1500,1600, 1700, 1800, 1900, 2000,2250, 2500, 2750, 3000, 3250,3500, 3750, 3850, 4000 orin 5 mm increments on request.S 32ConnectorKA02PUR cable 2 m KA05PUR cable 5 m KA10PUR cable 10 m KA15PUR cable 15 mConnection type Please enter code for nominal stroke and connection type in ordering code!marked in blue are available from stock.▼▼T emperature range–40...+85 °Chttp://www.balluff.deSSD interface Rod seriesSSD InterfaceSynchronous serial data transmission for controls made by Siemens,Schleicher, B & R, PEES,Schiele, Parker, Esitron etc.as well as for BalluffBDD-AM 10-...-1-SSD and BDD-CC 08-1-SSD display/controllers.BTL5-S1... with processor/controller, wiring exampleMicropulse Transducers B.8Reliable signal transmission,even over cable lengths of up to 400 m between control and BTL transducer is assured by especiallynoise-immune RS485/422differential line drivers and receivers. Any noise signals are effectively suppressed.Super-fast 2 kHz Sampling rateClock frequencydepends on cable length Cable length <25 m <50 m <100 m <200 m <400 mClock freq.<1000 kHz <500 kHz <400 kHz <200 kHz <100 kHzSSD interfaceRod seriesMicropulseTransducers Please enter code for coding, system resolution,nominal stroke and connection type in ordering code!▼Included:–Transducer–User's guidePlease order separately:Magnets page B.14Floats page B.15Connectors starting page BKS.3▼0Binary code rising (24 bits)1Gray code rising (24 bits)6Binary code rising (25 bits)7Gray code rising (25 bits)Ordering example:BTL5-S1_ _-M_ _ _ _-B-_ _ _ _Coding0025, 0050, 0075, 0100,0125, 0150, 0175, 0200,0225, 0250, 0275, 0300,0325, 0350, 0375, 0400,0425, 0450, 0475, 0500,0550, 0600, 0650, 0700,0750, 0800, 0850, 0900,0950, 1000, 1100, 1200,1300, 1400, 1500, 1600,1700, 1800, 1900, 2000,2250, 2500, 2750, 3000,3250, 3500, 3750, 3850,4000 or in 5 mmincrements on request.11µm25µm310µm420µm540µmSystemResolutionStandardnominal strokes [mm]S 32ConnectorKA02PUR cable 2 mKA05PUR cable 5 mKA10PUR cable 10 mKA15PUR cable 15 mConnection typesuper linearhttp://www.balluff.deCANopen interface Rod seriesMicropulse Transducers B.10CANopen interface Based on CAN (ISO/IEC 7498 andDIN ISO 11898), CANopen provides a Layer-7implementation for industrial CAN networks. The serial data protocol of the CAN specification is defined according to the producer-consumer principle as opposed to most other fieldbus protocols. Thiseliminates target addressing of the process data. Each bus station decides for itself how the received data are processed.The CANopen interface of the Micropulse transducer is compatible with CANopen conforming with CiA Stan-dard DS301 Rev. 3.0, and with CAL and Layer 2 CAN networks.CAN-BUS features–Line topology, star structure also possible using repeaters–Cost-effective 2-wire cabling–Fast response times, high data integrity using CRC,hamming distance of 6–Potential-free data transmission (RS485)– 1 Mbps at cable lengths < 25 m–Number of stations protocol-limited to 127CANopen offers a high level of flexibility with respect to functionality and dataexchnge. Using a standard data sheet in the form of an EDS file it is easy to link the Micropulse transducers to any CANopen system.Process Data Object (PDO)Micropulse transducers send their position information optionally in one or two PDOs with 8 bytes of data each. The contents of the PDOs is free configurable.The following information can be sent:–Current magnet position with resolution in 5 µm steps–Current velocity of the magnet with resolution selectable in 0.1mm/s steps–Current status of the four freely programmable cams.Synchronisation Object (SYNC)Serves as a net-wide trigger for synchronizing all network participants. When theSYNC object is received, all Micropulse transducers active on the bus store their current position and velocity information and then send it sequentially to the control.This assures time-synchronous capture of the measured values.Emergency Object This object is sent with the highest priority. This is used for example for errormessages when cam states change.Service Data Object (SDO)Service Data Objects trans-mit the parameters for the transducer configuration.The transducer configuration may be carried out on the bus by the controller, or offline using a PC with aconfiguration tool which runs under Windows. Theconfiguration is stored in the transducer in a non-volatile memory.CANopen Draft Standard 406 (Encoder Profile)CANopen system structuresCiA 199911-301v30/11-009VelocityPositionSPS/PC mit CAN-BUS interfaceRRSimple CANopen-System including position and velocity displayCANopen interface Rod seriesMicropulse TransducersPosition + VelocityPROFIBUS-DP interface Rod seriesMicropulse Transducers B.12As the market leading standard for serial data transmission for process automation, PROFIBUS-DP is the ideal choice for implementing automation tasks with cycle times of > 5 ms.Data transmission A PROFIBUS telegram can contain up to 244 bytes of user data per telegram and station. The BTL5-T uses max. 32 bytes (max. 4position values and max. 4velocity values) for process data transmission. Up to 126active stations (Address 0...125) can be connected on PROFIBUS-DP . User data cannot be sent with station address 126. This address is used as the default address for bus stations that have to be parameterized by a Class 2 master (for setting the device address if there are no mechanical switches available).Each PROFIBUS station has the same priority. Prioritizing of individual stations is not intended, but can be done by the master since the bus transmission only makes up a fraction of the process cycle anyway.At a transmission rate of 12 Mbps, the transmission time for an average data telegram is in the 100 µs range.MasterThere are two types of possible masters forPROFIBUS-DP . Master Class 1 carries out the user data interchange with the connected slaves. Master Class 2 is intended forstartup and diagnostic pur-poses and may be used to briefly assume control of a slave.GSD(Device Master Data)The length of the dataexchangeable with a slave is defined in the Device Master Data file (GSD) and ischecked by the slave with the configuration telegram and confirmed for correctness.In modular systems, various configurations are defined in the GSD file. Depending on the desired functionality,one of these configurations can be selected by the user when the system is configured. The BTL5-T is a modular device with the possibility of selecting the number of magnets (position values).SlaveOnce a PROFIBUS master has received the parameter set defined for the slave, it is able to exchange data.The parameter set consits of slave parameters and configuration data. The parameter data contain the description of the slave settings (e.g. resolution of a position value). Theconfiguration data describe the length and structure of the data telegram.For security reasons a slave is allowed to be written with new output data only by the master which previously parameterized andconfigured it. Only after the slave acknowledges both messages (parameter data and configuration data) can it be assumed that theconfiguration and function of the slave are known to the master.Process dataUnder PROFIBUS-DP the default is for process data to be sent from the master to slaves acyclically and for the slave data to then be queried. To ensuresynchronization of multiple devices, the master may use the SYNC and FREEZE services.After a RESET or after power is restored, the masterattempts to establish contact with all the parameterized slaves in order of lowest to highest address.PROFIBUS-DP permitsmultiple Class 1 and Class 2masters to be connected (see illustration below).PROFIBUS-DP Standard EN 50170Slave 1 Slave 2Slave 3 Slave 4 Slave xMaster Class 1Master Class 2Device address DIP switch settableS103 3-pin134S103 5-pin32415PROFIBUS-DP interface Rod seriesMicropulse TransducersPlease enter code forsoftware configuration and nominal stroke in ordering code!Included:–Transducer –User's guidePlease order separately:Magnets starting page B.14Connectors starting page BKS.6GSD file BTL5TGSD 119399 (free of charge)▼Data GNDR×D/T×D-N (A)R×D/T×D-P (B)VP +5 V +24 V 0 V (GND)Ground PROFIBUS-DP Shield supplyOrdering example:BTL5-T1_ 0-M_ _ _ _-B-S103Softwareconfiguration0025,0050,0075, 0100,0125,0150,0175, 0200,0225,0250,0275, 0300,0325,0350,0375,0400,0425,0450,0475, 0500,0550,0600,0650, 0700,0750,0800,0850, 0900,0950,1000,1100, 1200,1300,1400,1500,1600,1700,1800,1900, 2000,2250,2500,2750, 3000, 3250,3500, 3750, 3850 or in 5 mm increments on request.Standardnominal strokes [mm]1 1 magnet 2 2 magnets 3 4 magnetsPin assignments Control and data signals Supply voltage and shield▼Position + Velocityhttp://www.balluff.deMicropulse TransducersMagnets Rod seriesB.14MicropulseTransducersFloats Rod seriesDescription for seriesOrdering codeMaterial WeightOperating/Storage temperature Displacement in water Pressure resistance (static)http://www.balluff.deMicropulseTransducers B.16Installation notesRod seriesInstallation inhydraulic cylindersApplicationHydraulic cylinder withclosed-loop controlInstallationThe BTL Micropulsetransducer is provided with an M18 × 1.5 mounting thread. We recommend mounting into non-magnetizable materials.If magnetizable materials are used, the installation must be carried out as shown in the drawing below. Sealing is at the flange mounting surface, using the supplied O-ring 15.4 × 2.1 with the M18 × 1.5 thread..Threaded port to ISO 6149MicropulseTransducersHassle-free service Cylinder-mounted trans-ducers are often located in difficult to access spots. If a transducer is damaged or fails, replacing the complete transducer with head and waveguide is often a difficult and expensive proposition.Should a problem occur in the electronics of theInstallation notes Rod seriesMicropulse transducer, the electronics head can beeasily and quickly exchanged for a new one. The fluid circuit also remains intact,with no draining necessary.Servicing a vertical installationServicing a horizontal installationhttp://www.balluff.deMicropulse Special seriesDifficult applications often make special demands on the sensors. Balluff meets these requirements with transducers that have been specified and developed in conjunction with the systems integrator. Behind this is a large, highly motivated Micropulse development team as well as Balluff's own EMC Testing Laboratory and shock and vibration test centers.MicropulseWegaufnehmer B.18Special seriesThe "3-in-1" transducer!–2- or 3-way redundant positioning system for heightened safety requirements–One transducer consists of two or three completely separate positioning lines –Start/Stop or analog interfaces–Compact housing Available outputs:–analog 0...10 V,4...20 mA, 0...20 mA,–10...10 V–P-type pulse interfaceTilt control on rail carsPropeller pitch controlRudder control0...10 V 4...20 mA 0...20 mA –10...10 VMicropulse TransducersSpecial seriesMeasure travelwith the highest precisionMicropulse Transducers B.20。
微脉冲位移传感器在莱歇立磨系统中的应用及标定方法
微脉冲位移传感器在莱歇立磨系统中的应用及标定方法前言料层厚度是立磨操作非常重要的一个工艺参数。
莱歇在lm46.2+2cs立磨上采用德国巴鲁夫(balluff)btl5-e10-m0150-p-s32型微脉冲位移传感器,用于磨内物料厚度测量,取得了非常好的应用效果。
依据实际工作经验,在此对该传感器仪表在莱歇立磨中的应用及一些注意的问题浅加论述,供借鉴参考。
【中图分类号】tp212.91、巴鲁夫(balluff)btl5-e10-m0150-p-s32传感器安装及使用方法1.1 传感器介绍巴鲁夫(balluff)btl5-e10-m0150-p-s32传感器由电子部分(收发器)、波导管、定位磁铁组成。
检测原件由铝制挤压型材保护,检测元件(波导管)无需提供电源。
电子部分和波导管组成一体,定位磁铁安装在磨机摇臂上。
电子部分用于脉冲信号的发送与接收,以及信号处理和输出;波导管为脉冲信号的传送介质;磁环用于脉冲信号的反射。
工作时,电子部分和波导管保持静止状态,定位磁铁随磨辊摇臂移动,由于电子部分和定位磁铁的位置发生变化,脉冲信号发送和反射产生的延时也随之发生变化,根据不同的延时换算得到位移的变化量。
在微脉冲位移传感器的有效检测行程内,传感器输出信号与位置量成线性关系。
1.2微脉冲位移传感器在莱歇立磨上的安装和调试1.2.1 测量原理1.2.2 安装方法(1)安装时,先将传感器电子部分安装在磨辊轴承座侧面;然后将定位磁铁支架安装在主辊摇臂侧面;最后再定位磁铁用随机螺帽固定后装好保护罩螺栓即可。
(2)微脉冲位移传感器的电气信号连接要采用屏蔽电缆,按照传感器说明书和立磨电气接线图连接到液压系统本地控制盘上。
(3)电子部分防护罩螺栓要防止松动,禁止使用焊接的方法安装;定位磁铁的安装位置与波导管中心线的中心距保持在15~30mm。
1.2.3 传感器使用注意事项(1)在正常的环境条件下,气流和气压的变化对微脉冲位移传感器的工作影响很小;但当气流和气压变化较大时,会使微脉冲位移传感器产生测量误差。
巴鲁夫 机床传感器 说明书

用于机床的传感器严酷环境中的高精度反馈巴 鲁 夫机床制造水平的创新与进步,决定性地推动了工业生产过程的技术变革。
自动化技术的进步,又通常源于传感器技术的提升。
机床行业正在不断经历着,并将继续经历一系列技术进步——提高产品性能,灵活性及可靠运行时间。
巴鲁夫,作为数十载服务机床制造业的传感器制造商,将继续致力于以“服务机床行业”为宗旨,推动机床制造业的发展。
用于机床的传感器严酷环境中的高精度反馈电容开关 BCS机床应用的最佳选择圆柱形外壳系列光电传感器应用于机床工业圆柱形外壳机电式单档位/多档位组合行程开关和限位开关带安全开关元件的机电式单档位/多档位组合行程开关和限位开关单档位及多档位机电式/感应式组合行程开关和限位开关作为主令控制设备几乎用于所有自动控制的应用中,尤其用于传输线和机床的定位和限位。
无论您在何处使用,我们的机械结构均能保证安全可靠的开关动作。
它们专为确保在极端严酷的应用环境(诸如振动、冲击、撞击或冷却液润滑液侵蚀)中可靠应用而开发设计,数十年的应用证明了它们的价值。
我们的单档位及多档位组合行程开关和限位开关能够提供符合DIN 43697和DIN 43693标准以及满足特殊应用需求的外壳。
种类齐全的附件能够满足客户的特殊应用条件和结构。
机电式和感应式单档位/多档位组合行程开关和限位开关自动控制的经典之作BNS多档位组合行程开关快速更换顶杆模块的问题解决专家www.balluff.co对刀具最优化的计划和管理是现代生产设备无差错刀具安装,保证停机时间最短的必要因素。
刀具管理的关键组件是刀具识别系统。
所有的刀具信息,诸如ID 识别码,刀具寿命,几何尺寸等,均可保存在粘结在刀具上的记忆芯片中。
数据的载入(和读回)无需接触,因此无磨损。
当将刀具安装到机床上,数据会随即读入机床的存储器中,防止错误的数据写入。
当刀具从机床上卸下时,经过改写的数据会刷新存储芯片。
采用识别系统的另外一个优势是能够最优化管理刀具的寿命。
德国BALLUFF巴鲁夫位电感式传感器原理的孔径锥度误差测量仪
德国BALLUFF巴鲁夫位电感式传感器原理的孔径锥度误差测量仪因为我司在德国、美国都有自己的公司,专业从事进口贸易行业,所以我司的技术人员为都会轮流到国外厂家学习技术,以下是我司技术人员为大家介绍德国BALLUFF巴鲁夫位电感式传感器原理的孔径锥度误差测量仪电感式传感器是利用线圈自感或互感系数的变化来实现非电量电测的一种装置。
利用BALLUFF电感式传感器,能对位移、压力、振动、应变、流量等参数进行测量。
它具有结构简单、灵敏度高、输出功率大、输出阻抗小、抗干扰能力强及测量精度高等一系列优点,因此在机电控制系统中得到广泛的应用。
它的主要缺点是响应较慢,不宜于快速动态测量,而且传感器的分辨率与测量范围有关,测量范围大,分辨率低,反之则高。
电感式传感器利用电磁感应原理将被测非电量如位移、压力、流量、振动等转换成线圈自感量L或互感量M的变化, 再由测量电路转换为电压或电流的变化量输出。
电感式传感器具有结构简单, 工作可靠, 测量精度高, 零点稳定, 输出功率较大等一系列优点, 其主要缺点是灵敏度、线性度和测量范围相互制约, 传感器自身频率响应低, 不适用于快速动态测量。
电感式传感器种类很多,常见的有自感式传感器,互感式传感器和电涡流式传感器三种。
电感式传感器的工作原理是电磁感应。
它是把被测量如位移等,转换为电感量变化的一种装置。
按照转换方式的不同,可分为自感式(包括可变磁阻式与涡流式)和互感式(差动变压器式)两种 [2] 。
变磁阻式传感器当一个线圈中电流i变化时,该电流产生的磁通Φ也随之变化,因而在线圈本身产生感应电势e,这种现象称之为自感。
产生的感应电势称为自感电势。
变磁阻式传感器的结构如图1所示。
它由线圈、铁芯和衔铁三部分组成。
铁芯和衔铁由导磁材料如硅钢片或坡莫合金制成,在铁芯和衔铁之间有气隙,气隙厚度为δ,传感器的运动部分与衔铁相连。
当衔铁移动时,气隙厚度δ发生改变,引起磁路中磁阻变化,从而导致电感线圈的电感值变化,因此只要能测出这种电感量的变化,就能确定衔铁位移量的大小和方向。
巴鲁夫微脉冲位移传感器

微脉冲位移传感器
BTL
Sensors Worldwide
BTA 输出信号一览
电压输出:
BTA-A11-... BTA-G11-... BTM-A1-... BTA-C1_-... BTA-E1_-... BTM-E1-... BTM-H1
0 - 10 V -10 - +10 V 0 - 20 mA 4 - 20 mA
• 位置和速度信号
• 可以运用多达 4 个定位磁铁 • 分辨率 5µm (5µm-步进可调) • 信号传递达 5000 m (在10Kbit/s时)
R
可供外型:
• 绝对量输出信号
• 线性数据输出: +/- 30µm, 不受电线长度影响 • US- 速度在系统内部得到监控和修正 • 1 kHz 数据上传速度,不受电线长度影响 • 根据CiA标准- 解码器- 壳型DS406
坚固的外壳
坚固的旋入式不锈钢防护盖
微脉冲位移传感器
BTL
Sensors Worldwide
模拟信号输出
BTL5-A:
0 - 10 V
特点:
• 控制技术中的标准信号 • 标准信号便于再处理 • 信号可由所有的控制器进行处理 • 通过 4-20 mA-信号实现电线断裂监控 • 分辨率 0,1 mV / 1,6 µA (取决于输入卡) • 可选择递增或递减信号 • 电线长度受限 • 安装和布线必须按照 EMC-规定
• 防干扰的RS422/RS485差动驱动接口 • 分辨率取决于分析器 (最大 5 µm) • 便宜的输出选择 • 信号传递可达 500 m • 绝对的位置信息
可供外型:
控制器:
例如: Siemens S7 - SM338 (P) Bosch DPCD und DMC (P) B&R PWP4/NC-302 (M) Schleicher UPM 4U (M) Hydraulik-Ring NC100 (P) Parker EMC 100 (P) Herion µR-01 (P) Schiele PM (PMT) Mod.(P) ESITRON MP100,CPS5 usw.(P) Mitsubishi Melsec-A64BTL(P) WAGO Klemme 750-635 Delta Computer Systems Inc. RMC100 所有的 Balluff 分析卡 (P)
巴鲁夫位移传感器说明书

系列 冲击负载 振动 极性反接保护 过电压保护 绝缘强度 外壳防护等级 符合 IEC 60529 外壳材料 安装方式 10.2 mm 不锈钢管耐压强度 8 mm 不锈钢管耐压强度 连接方式 电磁兼容性测试: 无线电放射干扰 (RF) 静电干扰 (ESD) 电磁场干扰 (RFI) 瞬间高速干扰脉冲 (BURST) 因高频场感应干扰引起的 线路噪声 标准额定检测长度 [mm] 直径8 mm金属管 检测长度至1016 mm
BTL5-E1_-M_ _ _ _-... 4...20 mA或20...4 mA ≤ 500 Ω ≤ 0.66 µA
BTL5-C1_-M_ _ _ _-... 0...20 mA或20...0 mA ≤ 500 Ω ≤ 0.66 µA
BTL5-G11-M_ _ _ _-... –10...10 V及10...–10 V 最大 5 mA ≤ 5 mV ≤ 0.33 mV
一般数据 模拟量接口 数字脉冲接口 SSI 接口 CANopen 接口 PROFIBUS-DP 接口 用于液压缸定位 的传感器 定位磁环与浮子 安装提示 特殊型号系列
BTL5-A11... 0 V 输出 10...0 V 0...10 V GND +24 V DC (GND)
≤ 5 µm 系统分辨率/最小 2 µm f = 2 kHz ±100 µm(至500 mm 额定检测长度) ±0.02 % (500...4500 mm 额定检测长度) [150 µV/°C + (5 ppm/°C × P × U/L)] × ∆T [0.6 µA/°C + (10 ppm/°C × P × I/L)] × ∆T 20...28 V DC ≤ 150 mA 有 Transzorb保护二极管 500 V DC(外壳对地) –40...+85 °C –40...+100 °C
BTL6系列样本

BTL6外壳突出型结构PF 模拟量 G 模拟量 BTL6-G500-M_ _ _ _-PF-S115 –10...10 V
最大5 mA ≤ 5 mV
≤ 0.35 mV f最大 = 2 kHz ±200 μm(至500 mm额定检测长度) ±0.04 %(500...最大额定检测长度) 500 mm处30 ppm 10...30 V DC ≤ 150 mA –25...+70 °C –40...+100 °C BTL6-G500... 0V 0 V输出
■/
51
外壳突出型结构PF系列 浮子定位磁铁
巴鲁夫提供引导式或浮子两种定位磁铁。使用引导式定位磁铁的位 移传感器能够保证最高的分辨率和重复定位精度。 BTL5-P-4500-1为电磁铁,需24 V工作电压,可根据需要打开或关闭。 由于一次仅可启用一个磁铁,可以使用一个多路开关,在一个位移 传感器上操作多个定位磁铁。
49
外壳突出型结构PF系列 模拟量接口
可调测量范围
输出和测量范围设定 测量范围和输出信号可通过编程输入与相关的应用要求相匹配。具 转换或复位功能的示教模式。
通过编程输入La与Lb调节测量范围
1. 将定位磁铁放在新零点位置。
系列 输出信号 位移传感器接口 输出接口 订货编号 输出电压* 输出电流* 负载电流 最大纹波 负载电阻(推荐) 系统分辨率 采样频率 最大线性误差
–40...+85 °C
定位磁铁 BTL6外壳突出型结构PF 引导式
BTL5-N-2814-1S 阳极氧化铝 塑料 约35 g 任意
–40...+85 °C
长度
巴鲁夫位移传感器BTL6-A110说明书,BALLUFF(巴鲁夫)成立
巴鲁夫位移传感器BTL6-A110说明书,BALLUFF(巴鲁夫)成立于1921年,是一个世界著名的传感器制造商‘BALLUFF提供创新和实际感测解决方案,为汽车行业、冶金行业、机床行业、风电行业提供广泛的应用和产业巴鲁夫BTL6-A110-M0050-A1-S115的技术参数结构型号系列,型面结构接口模拟接口,电压接口插接器, M12工作电压 20.0...28.0 V分辨率≤ 10 µm许可/一致性 CEcURus用于动态规则应用 No产品组别微脉冲位移传感器代数 Generation 6反极性保护最高36 V防护等级符合IEC 60529 IP67 (带插接器)许可/一致性 CE,cURus,巴鲁夫位移传感器BTL6-A110说明书BALLUFF位移传感器又称为线性传感器,它分为BALLUFF电感式位移传感器,BALLUFF电容式位移传感器,BALLUFF光电式位移传感器,BALLUFF位移传感器超声波式位移传感器,霍尔式位移传感器。
BALLUFF电感式位移传感器是一种属于金属感应的线性器件,接通电源后,在开关的感应面将产生一个交变磁场,当金属物体接近此感应面时,金属中则产生涡流而吸取了振荡器的能量,使振荡器输出幅度线性衰减,然后根据衰减量的变化来完成无接触检测物体的目的。
德国巴鲁夫BALLUFF主营产品:德国BALLUFF编码器、BALLUFF传感器、BALLUFF 接近开关、BALLUFF光电开关、BALLUFF极限开关、BALLUFF限位开关、BALLUFF 位移传感器、BALLUFF连接器、BALLUFF磁环、BALLUFF发射器、BALLUFF接收器、BALLUFF位置开关、BALLUFF执行器、BALLUFF电子凸轮、BALLUFF位置开关、BALLUFF磁敏开关、BALLUFF电子识别系统BALLUFF编码器、接口。
BALLUFF编码器包括:BAW系列、BCS系列、BES系列、BFO系列、BGL系列、BHS系列、BIL 系列、BKS系列、BLE系列、BLS系列、BLT系列、BMF系列、BOS系列、BPN系列、BWL等,德国BALLUFF编码器、BALLUFF传感器、BALLUFF接近开关、BALLUFF 光电开关、BALLUFF极限开关、BALLUFF限位开关、BALLUFF位移传感器、BALLUFF 连接器、BALLUFF磁环、BALLUFF发射器、BALLUFF接收器、BALLUFF位置开关、BALLUFF执行器、BALLUFF电子凸轮、BALLUFF位置开关、BALLUFF磁敏开关、BALLUFF电子识别系统巴鲁夫位移传感器BTL6-A110说明书。
巴鲁夫位移传感器说明书

BTL5-T1_ _-M_ _ _ _-B/Z-S103Read this manual before installing and operating the Micropulse Trans-ducer.1.1Proper applicationThe BTL5 Micropulse transducer is intended to be installed in a ma-chine or system. Together with a PROFIBUS Master it comprises a position measuring system and may only be used for this purpose.Unauthorized modifications and non-permitted usage will result in the loss of warranty and liability claims.1.2Qualified personnelThis guide is intended for special-ized personnel who will perform the installation and setup of the system.1.3Use and inspectionThe relevant safety regulations must be followed when using the trans-1ducer system. In particular, steps must be taken to ensure that should the transducer system become de-fective no hazards to persons or property can result. This includes the installation of additional safety limit switches, emergency shutoff switches and maintaining the per-missible ambient conditions.1.4ScopeThis guide applies to the model BTL5-T1...B/Z-S103 Micropulse transducer.An overview of the various models can be found in Section 6 Versions (indicated on part label) on page 7.Note: For special versions, which are indicated by an -SA_ _ _ des-ignation in the part number, other technical data may apply (affect-ing calibration, wiring, dimen-sions etc.).1Safety Advisory.....................21.1Proper application..................21.2Qualified personnel ................21.3Use and inspection ................21.4Scope. (2)2Function andcharacteristics......................32.1Characteristics .......................32.2Function .................................32.3Available stroke lengths andmagnets .................................33Installation ............................33.1Mounting................................33.2Transducer, Installation...........43.3Magnets, Installation ..............54Wiring ....................................55Startup...................................75.1Check connections ................75.2Turning on the system............75.3Check output values ..............75.4Check functionality ................75.5Fault conditions......................76Versions (indicated on part label)......................................77Configuration........................87.1Default settings ......................87.2Presets ...................................87.3Configuration withCOM PROFIBUS....................87.4Configuring usingSiemens Step7.....................127.5General configuration notes.167.6Parameter data.....................177.7I/O configuration ..................197.8Diagnostic data (19)8T echnical Data ....................218.1Dimensions, weights,ambient conditions...............218.2Supply voltage (external)......218.3Control signals .....................218.4Connection to the processor 218.5Included in shipment............218.6Software...............................218.7Magnets (order separately)...218.8Accessories (optional). (21)The following patents have been granted in connection with this product:US Patent 5 923 164Apparatus and Method for Auto-matically Tuning the Gain of an AmplifierUL authorization File No.E2272562.1Characteristics–High data reliability: output data are checked in the µC for validityand plausibility.–Up to 4 positions can be pro-cessed–Definable working strokes–Absolute output signal–High resolution, repeatability and linearity–Insensitive to shock, vibration, contamination and noise–Max. fieldbus length 1200 m–Configuration using Step7, COM-PROFIBUS, WinDP, or otherconfiguration softwarer–Protected to IP 67 per IEC 60529–Pressure rated to 600 bar.–DIP switches for address setting –DIP switches for bus termination2.2FunctionThe transducer contains a wave-guide enclosed by an outer stain-less steel rod. A magnet attached to the moving member of the machine or to the cylinder piston is moved over the rod and its position con-stantly updated.The magnet defines the measured position on the waveguide. An inter-nally generated INIT pulse interacts with the magnetic field of the mag-net to generate a magnetostrictive torsional wave in the waveguide which propagates at ultrasonic speed.The torsional wave arriving at the end of the waveguide is absorbed in the damping zone. The wave arriv-ing at the beginning of the wave-guide creates an electrical signal in the coil surrounding the waveguide. The propagation time of the wave is used to determine the position to a resolution of 5 µm. This takes place with high precision and repeatability at the selected resolution within the measuring range indicated as the nominal stroke length.At the rod end is a damping zone, within which no reliable signal is available, but which may be entered by the magnet.The electrical connection between the transducer, the processor card or controller, and the power supply is accomplished using several plug-in cables.2Dimensions for installing theMicropulse transducer: ➥ Fig. 3-2Dimensions for installing the mag-net: ➥ Fig. 3-42.3Available stroke lengthsand magnetsTo provide for optimum fit in anyapplication, a wide range of stan-dard stroke lengths and magnets invarious form factors are available.Magnets and control arms musttherefore be ordered separately.The following nominal strokelengths are available:Stroke lengths [mm]Increments [mm]50 (50025)500 (100050)1000 (2000100)2000 (4000250)Other stroke lengths on request.33.1MountingWhen possible, use non-magnetiz-able material for attaching the trans-ducer and magnet ring. ➥ Fig. 3-1.When attaching the transducer tomagnetizable materials, appro-priate measures must be taken toprotect against magnetic disturb-ances ➥ Fig. 3-1. Note therecommended distance of thetransducer and cylinder fromstrong, external magnetic fields.Fig. 3-1: Mounting➀ - ➂ for magnetizable materials ➃ for non-magnetizable materials a =Spacer made of non-mag-netizable materialsb =Magnet33.2T ransducer, Installation The smallest permissible distance between magnet ring and rod mounting surface is shown inFig. 3-2.The transducer has either aM18×1,5 thread or a 3/4"-16UNF thread for mounting. The sealing is carried cut with the O-ring supplied at the flange facing.Important Installation Notes: The contact surface of the trans-ducer must be completely con-tacted by the mounting surface. The O-ring supplied must make a perfect pressure seal, i.e. the bevel for the O-ring must be configured exactly as shown in Fig. 3-3.To achieve secure mounting, use the proper nut for the mounting thread. When tightening the nut,cylinder rod should be at least13 mm.When attaching the transducer tomagnetizable materials, appro-priate measures must be taken toprotect against magnetic disturb-ances, ➥ Fig. 3-1. Note therecommended distance of thetransducer and cylinder fromstrong, external magnetic fields.Bevel for O-ring Threaded hole Fig. 3-3: Threaded hole for mounting the BTL with O-ringThreaded holeM18 × 1.5 perISO 6149O-ring 15.4 × 2.1Threaded hole3/4"-16UNF perSAE J475O-ring 15.3 × 2.4do not exceed a tightening torque of100 Nm.For horizontal mounting of trans-ducer with stroke lengths greaterthan 500 mm, the pressure tubeshould be supported or attached atits end.When installing in a hydraulic cylin-der, do not allow the magnet ring torub against the pressure tube. Thebore diameter in the piston andFig. 3-2: Transducer BTL5...B/Z, Dimensions3Fig. 3-4: Magnet (optional)BTL-P-1013-4R3.3Magnets, InstallationA magnet is required for each trans-ducer. This must be ordered sepa-rately. ➥ Fig. 3-4.For mounting the magnet we rec-ommend to use non-magnetizable material. ➥Fig. 3-1.BTL-P-1013-4SBTL-P-1012-4Rage lines to prevent noise coupling.Especially critical is inductive noise caused by AC harmonics (e.g. from phase-control devices), againstwhich the cable shield provides only limited protection.The signal is sent to the controller over the PROFIBUS-DP interface.Max. cable length of the intire field-bus: 1200 mThe transmission speed is a func-tion of cable length. EN 50170 is the reference for the values given in ➥ Table 4-1.Table 4-2: Pin assignments, S103connectorFig. 4-1: Pin assignments BKS,BTL...S103 connectorView of male/female side of the BTL5-T1...S103(female)(male)Power (male)4Fig. 4-2: BTL5-T1-...S103 with processor/controller, shown with S103f o r I P 67 r e q u i r e d !Fig. 4-6: Bus termination resistor (resistors built-in) BKS-S105-R01(optional)Fig. 4-7: Cable with connector (fe-male) BKS-S 48-15-CP-_ _,lengths: 02; 05; 10 m (optional)Fig. 4-4: PROFIBUS cable (male/female)BKS-S103/GS103-CP-_ _, lengths: 00.3; 02.0; 05.0; 10.0 m (optional)straightBKS-S103-00right angle BKS-S104-00Fig. 4-3: Connector (female) for BUS IN (optional)straightBKS-S105-00right angle BKS-S106-00Fig. 4-5: Connectors (male) for BUS OUT (optional)55.1Check connectionsAlthough the connections are polar-ity reversal protected, components can be damaged by improper con-nections and overvoltage. Before you apply power, check the connec-tions carefully.5.2Turning on the systemNote that the system may execute uncontrolled movements when first turned on or when the transducer is part of a closed-loop system whose parameters have not yet been set.6Supply voltage : 1 = DC 24 VElectr. connection :BTL5-T110-M1000-B-S103S103 = 1 × 3-pin male1 × 5-pin male 1 × 5-pin femaleRod Style ,Mounting :B =metric thread M18×1,5Z=Thread 3/4"-16UNFNominal stroke (4 digits):M = Metric units [mm]Type No. of magnetsPDU11fixed Position 1 4 Byte INT32Velocity 1 4 Byte INT3222fixedPosition 1 4 Byte INT32Position 2 4 Byte INT32Velocity 1 4 Byte INT32Velocity 2 4 Byte INT3234fixedPosition 1 4 Byte INT32Position 2 4 Byte INT32Position 3 4 Byte INT32Position 44 Byte INT32M i c r o p u l s e L i n e a r T r a n s d u c e rP R O F I B U S -D P i n t e r f a c eTherefore make sure that no haz-ards could result from these situa-tions.5.3Check output valuesAfter replacing or repairing a trans-ducer, it is advisable to verify the values for the start and end position of the magnet in manual mode. If values other* than those present before the replacement or repair are found, a correction should be made.*Transducers are subject to modifi-cation or manufacturing tolerances.5.4Check functionalityThe functionality of the transducer system and all its associated com-ponents should be regularly checked and recorded.5.5Fault conditionsWhen there is evidence that the transducer system is not operating properly, it should be taken out of service and guarded against unau-thorized use.7➔Fig. 7-1: Location of DIP switches S1Table 7-1: Station addresse7.1Default settingsThe transducer is supplied with the following default settings:–Station address 126–Resolution:Position 5 µm Velocity 0.1 mm/s –Maximum working/useful area 7.2PresetsThe service Set_Slave_Address can be used to configure the station address. For this service you need a DP Master Class 2. The GSD file BTL504B2.GSD (transducer system)is used for configuration. The GSD file provides all the information re-quired for settings. For configuring,the Siemens COM PROFIBUS can be used for example.For use in standard PROFIBUS sys-tems the station address is set be-fore startup using the DIP switches S1 which are built into the BTL ➥ Figs. 7-1 and 7-2 as well as Table 7-1.Fig. 7-3: GSD files in the subdirectory \GSDValues from 0 - 125 can be used for the station address. In a network each address can be used only oince! For value 126 the address 126 or the last address set using the Set_Slave_Address service is used. A value of 127 resets the BTL to its default condition. Since 127does not represent a valid address,bus operation is then not allowed.All address settings only become effective after a power reset.Changes which are made while power is on do not therefore have an immediate effect.TTo ensure a reliable rest signal level the bus must be appropriatelyterminated on both ends as shown in Fig. 4-1. The BTL5-T allows the bus to be terminated internally. To do this set DIP switches S1.9 and S1.10 to ON, ➥ Fig. 7-2. For IP 67the bus termination resistor sug-gested in Fig. 4-7 must be used.Then the internal bus termination should not be activated (S1.9 and S1.10 OFF)!. Stub lines should be avoided whenever possible.7.3Configuration with COM PROFIBUSTo configure the BTL5-T using COM PROFIBUS configuration software,you must be sure to use Version 5or higher of COM PROFIBUS.7.3.1Importing BTL5-TIn order to use the BTL5-T in the software, the GSD and an associ-ated bitmap file must be imported into the corresponding directories of COM PROFIBUS.The GSD file BTL504B2.GSD is copied to the subdirectory \GSD .➥ Fig. 7-3Fig. 7-2: View A, DIP switches S1for setting station address and for bus termination7The bitmap file BTL04B2N.DIB must be copied to the subdirectory \BITMAPS. ➥ Fig. 7-47.3.2Parameterizing the BTL After starting COM PROFIBUS the BTL5-T is located in directory \DP-SLAVE\ENCODER\LINEAR under the name BTL5-T (...) and is inserted into the network configura-tion using Drag&Drop. ➥ Fig. 7-5Double clicking on the BTL icon opens the 'Slave Properties' menu for the BTL.➥ Fig. 7-6Fig. 7-4: Bitmap files in subdirectory \DIBFig. 7-5: Adding BTL5-T to the network using Drag&Drop7The station address configured on the BTL is set under the parameter 'PROFIBUS-Address'. Values from 0-125 are allowed. For better identi-fication a name can be entered forFig. 7-6: 'Slave Properties' menu with BTL5-T Fig. 7-7: Configuration menu (no parameter set)the BTL in the 'Station name' field.If there is more than one Master in the network the selection box'Param. assign. master' can be used to select a Master which setsth eparameters for the BTL upon system start.The [ Configuration ] button is used to open the dialog for BTL param-eterizing. ➥ Fig. 7-7Since the BTL5-T is a modular de-vice there is no active parameter record shown in the illustration. Forthis reason the first step must be to select an appropriate parameter module. Activate the selection listby clicking on the [ Module ] button.➥ Fig. 7-87Double clicking on the desired mod-ule adds it to the configurationtable. Since the BTL is a single-module device, only one modulecan be selected at a time. If a mod-ule was selected previously, theexisting module must be deletedbefore making another selection.➥ Fig. 7-9Clicking on the [ Parameter ] buttonopens the dialog for device param-eterizing. ➥ Fig. 7-10Fig. 7-8: Module selectionFig. 7-9: Configuration menu (with parameter data)Depending on the module selected the parameter number shown may differ. By default the BTL is set to an internal working resolution of 5 µm (parameter 'Pos. Revolution Unit').The external output resolution is 1µm (parameter 'Pos. Engineering Unit'). The velocity is set to 0.1 mm/s. The following settings always refer to the set output resolution.7Fig. 7-10: Parameterizing the BTL5-T...The [ Hex ] button allows you to represent the parameter data in hex format. This function is not however needed under normal circum-stances, and is used mainly for di-rect comparison of the parameter data with the parameter tables shown in this manual. ➥ Fig. 7-117.4Configuring using Siemens Step7To set parameters for the BTL5-T using Step7 configuration software,be sure that Step7 Version 5 or higher with Service Pack 3 is used.7.4.1Import BTL5-TTo use the BTL5-T in the Step7hardware configurator, the GSD file must be imported to the system using the menu point 'Extras' →'Install new GSD'. When updating the GSD file be sure that no appli-cation is currently using the GSD file, since otherwise the system cannot exchange the file.➥ Fig. 7-12Fig. 7-11: Hex representation of the parameter data7.4.2Parameterize BTLAfter importing the BTL5-T will be located in the hardware catalog in path PROFIBUS-DP\ADDITIONAL FIELD DEVICES\ENCODER\BTL5-T.➥Fig. 7-137Fig. 7-12: Installing a new GSD file and updating the catalog contents When selecting a BTL, the modular configuration dictates that you pro-ceed in two steps. In the first step the directory BTL5-T must bedragged and dropped directly to the bus in the graphical configuration representation. ➥ Fig. 7-14Fig. 7-13: Hardware catalog7Fig. 7-14: Using Drag& Drop to add the BTL5-T to the networkFig. 7-15: Using Drag& Drop to add the BTL5-T to the tabulr device configurationIn a second step the function mod-ules are assigned to the device. To do this, select the device in the graphic. Next drag and drop the desired module from the hardware catalog into the tabular device con-figuration. ➥ Fig. 7-15Double clicking on the module in the tabular representation of the device configuration opens the cor-responding dialog for parameter assignment. ➥ Fig. 7-16The .parameter assignment for the BTL is done on the 'Parameter as-signment' tab.Depending on the module selected the parameter number shown maydiffer. By default the BTL is set to an7Fig. 7-16: 'Parameter assignment' tab Fig. 7-17: Hex representation of the parameter data internal working resolution of 5 µm (parameter 'Pos. Revolution Unit').The external output resolution is 1 µm (parameter 'Pos. Engineering Unit'). The velocity is set to0.1 mm/s. The following settings always refer to the set output reso-lution.The [ Hex ] button allows you to represent the parameter data in hex format. This function is not however needed under normal circum-stances, and is used mainly for di-rect comparison of the parameter data with the parameter tables shown in this manual. ➥ Fig. 7-177.5General configuration notesThe meaning and parameterizing which are the basis of Class 1 and Class 2 functionality can be found in the specification “PROFIBUS - Pro-file for Encoder - Order No. 3.062”.If you have problems during startup or configuration of the BTL5-T,check the following points:–The device address used in the configuration system must agree with the address set on the BTL.–The module must be selected to conform with the BTL used. If in doubt, check the BTL part num-ber.–Depending on the parameter assignment you have performed,7both the number and the format of the output values may vary.–If the CPU-315-2-DP is used as the Master, consistend data can be represented in theprocess map only using a maximum of 2words (1x position). To read con-sistent data >4 bytes the SFC 14must be used.–Exceeding the programmed working range limits causes the BTL to issue a diagnostic report (External User Diagnostic). This diagnostic report can be read using SFC 13.–In standard configuration, as soon as an External User Diag-nostic is issued the CPU-315-2-DP switches over to Stop state(controller program stops run-ning). If this response is not de-sired, OB82, OB86 and OB1212should be implemented in the controller. Error response can be encoded in these OBs specifi-cally for each PROFIBUS station.For this you must select the CPU in the hardware configurator and open the menu 'Extras' → 'Re-port system error' . ➥ Fig. 7-18Reporting of system errors to the OBs is activated by using the checkbox 'Create Error OBs'. The content of the Error OBs must then be appropriately coded in the con-trol program.Fig. 7-18: Setting station-specific behavior for "Report system error'77.6Parameter dataTable 7-2a: Parameter data7Table 7-2b: Parameter data7Table 7-3: I/O configuration 7.7I/O configuration7.8Diagnostic dataTable 7-4a: Diagnostic dataThe number of I/O data is specified by the I/O configuration. The datacontents can be specified in the parameter data (Mode_Selector).7Table 7-4b: Diagnostic dataBTL5-T1_ _-M_ _ _ _-B/Z-S103Micropulse Linear Transducer - Rod StyleResolution, selectable in steps of 5 µm Velocity, selectable in steps of 0.1 mm/s Sampling rate f Standard = 1 kHz Non-linearity ± 30 µmHysteresis< 1 LSB Repeatability< 2 LSB (resolution + hysteresis)Temperature coefficient< (6 µm + 5 ppm * nominal length)/K Shock loading 100 g/6 ms per IEC 60068-2-27 1Continuous shock 100 g/2 ms per IEC 60068-2-29 1Vibration 12 g, 10 to 2000 Hz per IEC 60068-2-6 1(take care to avoid inherent reso-nances of protective tube)Pressure up to 600 bar when installed in a hydraulic cylin-der1Individual specifications as per Balluff factory standard8.1Dimensions, weights,ambient conditionsNominal length< 4000 mm Dimensions➥ Fig. 3-2Weight approx. 2 kg/m Housing anodized aluminum Pressure tube stainless steel 1.4571diameter 10,2 mm wall thickness 2 mm e-modulus ca. 200 kN/mm 2Mounting threadsM18 × 1.5 or 3/4"-16UNFOperating temp. –40 °C to +85 °C Humidity < 90%, non-condensing Protection class per IEC 60529 IP 67 when closed up8T Typical values at DC 24 V and 25 °C. Ready for operation at once, full accuracy after warm-up. With magnet BTL-P-1013-4R, BTL-P-1013-4S or BTL-P-1012-4R:8.2Supply voltage (external)Regulated supply voltage BTL5-T1...DC 20 to 28 V Ripple < 0.5 V ssCurrent draw 2< 130 mAInrush< 3 A/0.5 ms Polarity reversal protection built-in Overvoltage protection Transzorb diodes Dielectric strengthGND to housing 500 V2depending on load on VP (repeater,bus terminator)8.3Control signalsRxD/TxD-N, RxD/TxD-P , Data GND per EN 501708.4Connection to the processorCable➥ Fig. 4-1Twisted-pair, shielded.Max. fieldbus length 1200 m 8.5Included in shipmentTransducer (not incl. magnet)➥ Fig. 3-28.6SoftwareOrder the GSD file separately at no cost or download from www.balluff.de underMicropulse Transducers / Software.E-mail requests can be made to PROFIBUS@balluff.de.8.7Magnets(order separately)Magnets BTL-P-1013-4R,BTL-P-1013-4S, BTL-P-1012-4R supplied with appropriate spacer POM 8 mmDimensions➥ Fig. 3-4Weight approx. 10 g Housing anodized aluminum Operating temp. –40 °C to +85 °C Magnets BTL5-P-4500-1(Electromagnet)Weight approx. 80 g Housing plasticOperating temp. –40 °C to +60 °C8.8Accessories (optional)For PROFIBUS connections:Connector (female)➥ Fig. 4-3Connector (male)➥ Fig. 4-5BKS-S103/GS103-C P-_ _ _Cable with connector ➥ Fig. 4-4BKS-S105-R01Termination resistor ➥ Fig. 4-6For power supply:BKS-S48-15-CP-_ _Cable with connector➥ Fig. 4-7N o . 829 987 - 726 E • 01.104569 • E d i t i o n 0405; s p e c i f i c a t i o n s s u b j e c t t o c h a n g e s • R e p l a c e s e d i t i o n 0406.。
BALLUFF 微脉冲位移传感器 说明书

– 处理卡的结构为欧洲插 卡规格,可用于19"组 件插座和插卡座/凸导 轨。
– 位置数据的刷新频率最 大为2 KHz。这样,即便 很快的运动速度,处理 卡都能捕捉到当前的位 置,滞后错误可基本忽 略。
– 微处理器的数字量化控 制,带来了非常高的分 辨率(小至 0.01 mm)。
– 可选择并行数据格式的 二进制码,格雷码和 BCD码。
接口: – InterBus – PROFIBUS-DP – CANopen – DeviceNet – Ethernet TCP/IP – MODBUS – CC-Link
分辨率:1 µm 定位磁块配置 (1...4)
更多技术详情及订货:
WAGO Kontakttechnik GmbH Hansastraße 27 32423 Minden 电话: +49/571/887-0 传真: +49/571/887-169 E-Mail: info@
– 绝缘的DIN面板安装外壳 (包含安装件)
– 8个可编程输出 – 可带8个方向开关点 – 14 mm长7段红色LED数码管显
示,6位显示 – 面板上LED开关位置显示 – 300 个开关点可分配给多达15个
程序
– 零点偏移调整 – 静态和动态开关点均带有空转时
间补偿
– 多个BDD-CC 08可并联 – 内置传感器供电电源300 mA, 24 V – 绝缘的DIN面板安装外壳
74 g
最大冲击加速度
200 g
210 g
最大正弦速度
2.0 m/s 1.9 m/s
最大冲击速度
5.1 m/s
3.5 m/s
最大振幅
51 mmp-p
0...20 mA, 20...0 mA
德国BALLUFF位移传感器

德国BALLUFF位移传感器信息参考来源:广州兰瑟电子科技德国BALLUFF位移传感器分类:BNS完整电子式、机电式行程开关系列、BOS光电开关、BES感应式接近开关、电容开关、BMF磁敏开关,BTL直线位移传感器,RFID识别系统,插接件等。
德国BALLUFF位移传感器型号描述:巴鲁夫(BALLUFF)电感式接近传感器BES 113-356-SA6-S4巴鲁夫(BALLUFF)电感式接近传感器BES 516-300-S 135-S 4-D 巴鲁夫(BALLUFF)电感式接近传感器BES M08MI-PSC20B-BV03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-05 巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-03巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-05巴鲁夫(BALLUFF)电感式接近传感器BESM08EC-PSC15B-S49G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PSC20B-S04G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PS0B-S04G巴鲁夫(BALLUFF)位移传感器BAW G06EE-UAF20B-EP03-K巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP015-GS04巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP03巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP05巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD25F-BP-03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP002-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP015-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP05巴鲁夫(BALLUFF)位移传感器BAW M12MI-UAC20B-S04G巴鲁夫(BALLUFF)位移传感器BAWM08EI-UAD15B-BP002-GS04 巴鲁夫(BALLUFF)电容式接近传感器BCS 010-PSB-1-L-P02巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PS-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S4巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-NSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-PSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-NSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-PSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS-20GM10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BOS-18M-PA-1PD-E5-C-S4,巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BES 516-114-S4-C 10-30V巴鲁夫(BALLUFF)微型断路器BES113-356-SA6-S4巴鲁夫(BALLUFF)微型断路器BES113356SA6-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S135-S4-D巴鲁夫(BALLUFF)微型断路器BES516-347-M0-C-03巴鲁夫(BALLUFF)微型断路器BES517-140-P5-H巴鲁夫(BALLUFF)微型断路器BESM12MI-PSC20B-S04G巴鲁夫(BALLUFF)微型断路器BESM12MI-PS0B-S04G巴鲁夫(BALLUFF)微型断路器BKS-S33M-00?巴鲁夫(BALLUFF)微型断路器BOS15K-S-E1-P-S75巴鲁夫(BALLUFF)微型断路器BRGB3-W AB12EP-P-R-K-SA8-0.3 巴鲁夫(BALLUFF)微型断路器BRGC5-W AP360-0P-G-0-SR巴鲁夫(BALLUFF)微型断路器BTL5-E10-M2000-B-S32巴鲁夫(BALLUFF)微型断路器BTL5-S173-M0206-P-S32巴鲁夫(BALLUFF)微型断路器dks-s20-2-05巴鲁夫(BALLUFF)微型断路器BES516-3005-E4-C-PU-05巴鲁夫(BALLUFF)微型断路器BES113-356-SA31-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S-135-S4-D 36V巴鲁夫(BALLUFF)微型断路器BES516-3021-G-E4-C-PU-02巴鲁夫(BALLUFF)微型断路器BES516-3022-G-E5巴鲁夫(BALLUFF)微型断路器BES516-325-G-S4-C巴鲁夫(BALLUFF)微型断路器BES516-325-S4-C巴鲁夫(BALLUFF)微型断路器BES516-362-S4-CW巴鲁夫(BALLUFF)微型断路器BES516-371-SA10-S4-003巴鲁夫(BALLUFF)传感器控制器BKS-S32M-C-00巴鲁夫(BALLUFF)电感式接近传感器BTL5-S173-M0350-B-S32 巴鲁夫(BALLUFF)电感式接近传感器BTL-P-1012-4R巴鲁夫(BALLUFF)光电开关BOS18M-PS-1XB-E5-C-S4巴鲁夫(BALLUFF)电感式接近传感器BRGB3-W AB12-EP-P-R-K-SA8-03。
BALLUFF直线位移传感器选型手册
系列
冲击负载 振动 极性反接保护 过电压保护 绝缘强度 外壳防护等级 符合 IEC 60529 外壳材料 安装方式 10.2 mm 不锈钢管耐压强度 8 mm 不锈钢管耐压强度 连接方式 电磁兼容性测试: 无线电放射干扰 (RF) 静电干扰 (ESD) 电磁场干扰 (RFI) 瞬间高速干扰脉冲 (BURST) 因高频场感应干扰引起的 线路噪声 标准额定检测长度 [mm] 直径8 mm金属管 检测长度至1016 mm
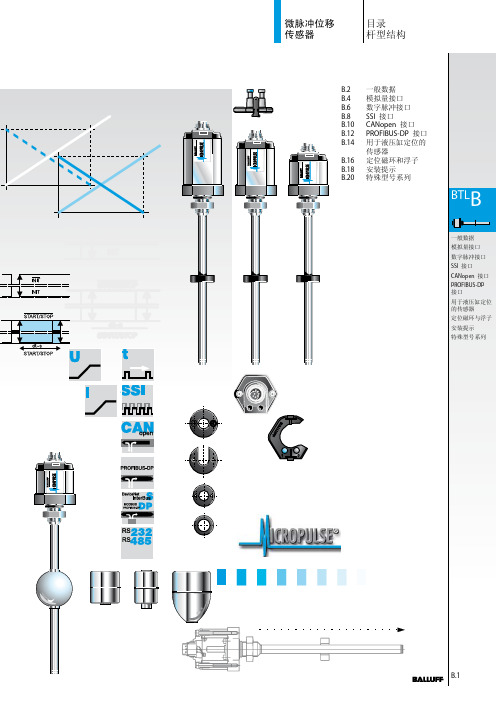
微脉冲位移 传感器
BTL5 杆型结构
一般数据 杆型结构
额定检测长度=检测区域 磁环
衰减区 (无效区)
螺纹 M18x1.5 安装面
额定检测长度=检测区域 磁环
螺孔 M4×4/6 深
衰减区 (无效区)
螺纹 3/4"x16 UNF 安装面
额定检测长度=检测区域
螺孔 M4×4/6 深
标准订货中包含 – 位移传感器 (从B.4 开始选取您所需的接口) – 简明用户手册
另请单独订购:
定位磁环 见 B.16 安装螺帽 见 B.16 浮子 见 B.17 插头 见 BKS.3
B.
系列
外壳 B BTL5_ _ _ _ -B-_ _ _ _ 公制安装螺纹 M18×1.5
B = 标准外壳
外壳 Z BTL5_ _ _ _ -Z-_ _ _ _ 3/4" UNF 安装螺纹
外壳 B8 BTL5_ _ _ _ -B8-_ _ _ _ 公制安装螺纹 M18×1.5 8 mm 直径金属杆 最大额定检测长度 1016 mm
外壳 Z8 BTL5_ _ _ _ -Z8-_ _ _ _ 3/4" UNF 安装螺纹 8 mm 直径金属杆 最大1016 mm 额定检测长度
BALLUF传感器(微脉冲位移传感器)_图文.
目录杆型结构微脉冲位移传感器接口系列冲击负载振动极性反接保护过电压保护绝缘强度外壳防护等级符合 IEC 60529外壳材料安装方式 0.2 mm 不锈钢管耐压强度8 mm 不锈钢管耐压强度连接方式电磁兼容性测试:无线电放射干扰 (RF静电干扰 (ESD电磁场干扰 (RFI瞬间高速干扰脉冲 (BURST因高频场感应干扰引起的线路噪声标准额定检测长度 [mm]直径8 mm 金属管检测长度至0 6 mm 一般数据杆型结构微脉冲位移传感器耐高压达 600 bar ,重复精度高非接触,坚固耐用BTL 微脉冲位移传感器是在严酷环境中经久耐用的位置反馈系统,检测范围从25到5500 mm 。
传感器的检测波导管安装在耐高压的不锈钢金属管中受到可靠的保护。
本系统非常适合于液压缸中的位置反馈或在食品化工领域中用于腐蚀性液体的液位控制。
标准订货中包含–位移传感器 (从B.4 开始选取您所需的接口–简明用户手册另请单独订购:定位磁环见 B. 6安装螺帽见 B. 6浮子见 B. 7插头见BKS.3B.2BTL5 杆型结构 00 g/6 ms 符合 IEC 60068-2-272 g, 0...2000 Hz 符合 IEC 60068-2-6有Transzorb 保护二极管500 V DC (外壳对地IP 67 (与防护等级为IP 67 的BKS-S...插头可靠连接时铝,经阳极氧化处理/ .457 不锈钢保护管, .3952 不锈钢精密铸造法兰盘外壳 B ,螺纹M 8× .5 ;外壳 Z , 3/4"-6UNF600 bar ,安装在液压缸中250 bar ,安装在液压缸中插头或电缆连接EN 550 第组,A 级IEC 6 000-4-2 ,锐度 3IEC 6 000-4-3 ,锐度 3IEC 6 000-4-4 ,锐度 4IEC 6 000-4-6 ,锐度 30025, 0050, 0075, 0 00, 0 25, 0 50, 0 75, 0200, 0225, 0250, 0275, 0300, 0325, 0350, 0375, 0400, 0425, 0450, 0475, 0500, 0550, 0600, 0650, 0700, 0750, 0800, 0850, 0900, 0950, 000, 00, 200, 300, 400, 500, 600, 700, 800, 900, 2000, 2250, 2500, 2750, 3000, 3250, 3500, 3750, 3850, 4000 或者以5 mm 步进订货,直至5500 mm (取决于步数系列BTL5杆型结构微脉冲位移传感器一般数据杆型结构模拟量接口杆型结构微脉冲位移传感器B.4标准订货中包含:–位移传感器–调节装置–简明用户手册另请单独订购:定位磁环见 B. 6安装螺帽见 B. 6 插头从BKS.3起00 % 量程范围内零点终点调节模拟信号的零点和终点可通过按压按键来调节。
巴鲁夫BTLI微脉冲位置传感器

K.H.1
Ex.4
Ex.6
Ex.8
i.3
巴鲁夫微脉冲直线位移传感 器是在严酷环境中应用的理 想选择。检测长度从25mm到 5500mm。
有多种输出信号形式可供选 择以匹配您的专用控制器。
此外,我们还提供带有多种 可编程功能的处理卡,为您 的控制器提供数字或模拟数 据信号。
滞后是到达并超过某一位 置,又以反方向从其他位置 返回该位置时所引起的信号 差异。
线性度
关断点
检测元件的线性度是一条线 性特征曲线。当输入值与输 出值之间的关系为一条直线 (一次函数)时,检测元件 的灵敏度恒定。线性范围在 X-Y轴平面内假定。当特征 曲线不是一条直线时为非线 性的。 非线性 非线性是围绕连接检测范围 的零点与终点的直线的最大 偏差量。 在位置(或检测点)与电 压、电流或数字量等输出信 号之间存在线性关系。磁致 伸缩传感器的线性度曲线在 系统使用寿命内保持不变, 并且,曲线能够被校正。
如果电路本身不产生会引燃 IIA, IIB 或IIC 组(测试环境满 足标准)爆炸环境的火花或 热效应,那么该电路被认为 是本质安全的。测试环境考 虑到正常的操作过程和某些 故障环境。 为了满足本质安全要求,对 电子和电气组件均有特定的 限制。 此外,相比普通的工业应 用,这里所使用的负载必须 减小: – 考虑到电压会影响绝缘常
i.5
装有微脉冲位 移传感器的液压缸
注塑机
挖掘机
i.6
切纸机
清洗机 装有微脉冲位 移传感器的液压缸
在危险环境中的定位 风力发电机
微脉冲位移传感器 应用
i
应用
巴鲁夫微脉冲位移传感器具 有在各种自动化和控制技术 领域应用的特点,甚至是在 极端恶劣的环境中。
Balluff_BTL_Series_Part_1_E_072009

BIW 750 mm
Micropulse 位移传感器 BIW –高性能, 长寿命和抽拉式机械兼容结构
BOD 6000 mm
光电测距传感器 BOD – 适合任何材料和颜色
BTL 5000 mm
BTL7 7600 mm
MICROPULSE 位移传感器 BTL– 特别坚固和可靠
BML 48000 mm
线性磁栅位移传感器BML – 高精度, 长距离位移检测
相比标准巴鲁夫 PROFIBUS MICROPULSE 传感器更加经济 可连接 4 个MICROPULSE M1 / P111接口的传感器到 PROFIBUS总线。 此外,还可以连接8个离散量传感器 个模拟量开关 (BNI PBS-552…)。 (BNI PBS-551…) 或 4
拥有BTL MICROPULSE 传感器的强大功能。 直接连接总线,效率更高。 IP 67 防护等级的完整解决方案。
BNI PBS-551-000-Z001
数字输入端口 针 1 2 功能 +24V / 1.0 A 数字输入
3
4 5
0V
数字输入 功能 GND FE
4
5
模拟输入 (电流)
功能GND FE
注意:
没有使用的输入端口必须使用端盖密封,保证IP67的防护等级
PROFIBUS BTL 总线连接器: 传感器针脚
数字脉冲接口方块图
各种数字脉冲接口:
I、K和L将很快停产, 对于新应用请不要 选用。
脉冲接口的高精度数字芯片
脉冲接口的高精度数字芯片 巴鲁夫数字芯片适合于自行开发控制和处理接口模块的厂商 可以同时处理4个磁块的位置信息 高分辨率 1µm
巴鲁夫 数字芯 片 44QFP
双油缸磷铁环压脱机同步超差问题解决方案

双油缸磷铁环压脱机同步超差问题解决方案齐铭;李云【摘要】为解决磷铁环压脱机的同步超差问题,对设备现状及问题产生的根源讲行综合分析,并进行多次改造尝试,最终确定将位移传感器改造为油缸内置式位移传感器进行试验.该位移传感器选用德国巴鲁夫BTL微脉冲位移传感器,具有无限机械寿命、测量误差<0.1mm、可重复性极高、稳定性好等特点.改造完成后,油缸内置式巴鲁夫位移传感器效果良好,数据稳定可靠,油缸同步精度可以达到0.5%,因传感器导致的同步超差故障得到完美解决.【期刊名称】《世界有色金属》【年(卷),期】2017(000)023【总页数】2页(P62,64)【关键词】磷铁环压脱机;同步超差;内置式位移传感器【作者】齐铭;李云【作者单位】中国铝业连城分公司,甘肃兰州730335;中国铝业连城分公司,甘肃兰州730335【正文语种】中文【中图分类】TF3511 改造背景磷铁环压脱机做为电解铝厂组装车间的关键设备,其主要作用电解生产线下线的残极经残极压脱后,将导杆组钢爪上的磷铁环压脱下来,完成钢爪和磷铁环的分离,重新进入生产线循环使用。
在这个工序上,连城分公司200KA炭素系统使用的是AISCO公司的联合压脱机,将残极和磷铁在一台设备上同时压脱。
由于炭块尽寸较小(L=1500),该设备采用单油缸四爪同时压脱方式,运行高效、可靠[1]。
随着电解槽向大型化方向发展,电解槽用炭阳极尺寸也逐步加大。
因此在设备选购时对磷铁环压脱机的性能提出了更加严格的要求。
由于连城分公司500KA炭素系统阳极炭块长度达到了1850mm(后改为1890mm),在选择磷铁环压脱机时,选择单爪压脱、两爪压脱还是四爪压脱颇费了一番周折。
最终选择了当时理念比较先进的双油缸四爪磷铁环压脱机。
该型压脱机为新乡宏达冶金振动设备有限公司制造,为当时国内第一台双油缸磷铁环压脱机。
采用两个顶升油缸同步顶升,从理论解决了大尺寸阳极钢爪在压脱过程出现偏载时对油缸的损伤等问题。
BALLUFF位移传感器工作原理和注意事项

BALLUFF位移传感器工作原理和注意事项BALLUFF位移传感器工作原理和注意事项年最后两个月把不需要的东西扔了,让你觉得不舒服的关系也要说清楚断了,让你为之烦恼的也该放下了,不要把这些零零碎碎的糟糕事带到新的一年,因为2020年会更好啊,都会越来越好的。
BALLUFF位移传感器工作原理:BALLUFF位移传感器可准确非接触测量被测物体的位置、位移等变化,主要应用于检测物的位移、厚度、振动、距离、直径等几何量的测量。
按照测量原理,激光位移传感器原理分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量。
1、激光三角测量法原理:激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下看见这个光点。
根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。
同时,光束在接收元件的位置通过模拟和数字电路处理,并通过微处理器分析,计算出相应的输出值,并在用户设定的模拟量窗口内,按比例输出标准数据信号。
如果使用开关量输出,则在设定的窗口内导通,窗口之外截止。
另外,模拟量与开关量输出可独立设置检测窗口。
<br>贝特威拥有业界齐全的高精度激光三角测量传感器,分辨率可以达到0.03um,最远检测距离可以达到5.4m,为高精度测量检测提供全面的解决方案。
2、激光位移传感器采用回波分析原理来测量距离以达到一定程度的精度。
BALLUFF位移传感器内部是由处理器单元、回波处理单元、激光发射器、激光接收器等部分组成。
激光位移传感器通过激光发射器每秒发射一百万个激光脉冲到检测物并返回至接收器,处理器计算激光脉冲遇到检测物并返回至接收器所需的时间,以此计算出距离值,该输出值是将上千次的测量结果进行的平均输出。
BALLUFF巴鲁夫传感器的特点
BALLUFF巴鲁夫传感器的特点德国BALLUFF巴鲁夫传感器工作原理特点BALLUIFF巴鲁夫传感器是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
BALLUFF巴鲁夫传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。
它是实现自动检测和自动控制的首要环节。
BALLUFF巴鲁夫传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。
通常根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等类。
德国ba11uf巴鲁夫光电传感器是采用光电元件作为检测元件的传感器。
它首先把被测量的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。
光电传感器一般由光源、光学通路和光电元件三部分组成。
光电检测方法具有精度高、反应快、非接触等优点,而且可测参数多,传感器的结构简单,形式灵活多样,因此光电式传感器在检测和控制中应用非常广泛。
BALLUFF位移传感器又称为线性传感器,它分为电感式位移传感器,电容式位移传感器,光电式位移传感器,位移传感器超声波式位移传感器,霍尔式位移传感器。
电感式位移传感器是一种属于金属感应的线性器件,接通电源后,在开关的感应面将产生一个交变磁场,当金属物体接近此感应面时,金属中则产生涡流而吸取了振荡器的能量,使振荡器输出幅度线性衰减,然后根据衰诚量的变化来完成无接触检测物体的目的。
BALLUFF巴鲁大传感器光敏二极管是常见的光传感器。
光敏二极管的外型与一般二极管一样,只是它的管壳上开有一个嵌着玻璃的窗口,以便于光线射入,为增加受光面积,PN结的面积做得较大,光敏二极管工作在反向偏置的工作状态下,并与负载电阻相串联,当无光照时,它与普通二极管一样,反向电流很小(<?A),称为光敏二极管的暗电流,当有光照时,载流子被激发,产生电子-空穴,称为光电载流子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阻尼吸收器
波导管
励磁磁场
励磁电流脉冲 定位磁铁 机械波
铜导线
信号 转换器
接收器
微脉冲位移传感器
BTL
Sensors Worldwide
什么叫“增量式“?
输出信号由一系列正弦脉冲和矩形脉冲组成。
需要确定一个基准点! 输出信号不恒定!
微脉冲位移传感器
BTL
增量式绝对位置测量位移传感器的输出信号
微脉冲位移传感器
BTL
Sensors Worldwide
BTA 输出信号一览
电压输出:
BTA-A11-... BTA-G11-... BTM-A1-... BTA-C1_-... BTA-E1_-... BTM-E1-... BTM-H1
0 - 10 V -10 - +10 V 0 - 20 mA 4 - 20 mA
• 位置和速度信号
• 可以运用多达 4 个定位磁铁 • 分辨率 5µm (5µm-步进可调) • 信号传递达 5000 m (在10Kbit/s时)
R
可供外型:
• 绝对量输出信号
• 线性数据输出: +/- 30µm, 不受电线长度影响 • US- 速度在系统内部得到监控和修正 • 1 kHz 数据上传速度,不受电线长度影响 • 根据CiA标准- 解码器- 壳型DS406
电缆或插头连接
安装轨道
与许多其它直线位移传感器通用
微脉冲位移传感器
BTL
B/Z 结构外壳
Sensors Worldwide
尾端螺纹 不锈钢感应管
完全适用于液压缸和液位检测
将浮子保持在杆 上
磁环或浮子
编程器件
允许用户配置测量范围 (可卸下)
通用安装螺纹
提供公制和英制螺纹
可拆卸的电子头部
需要时只需现场更换电子部件,无需更 换杆件!
(壳型)
BTL5-Xyy-M....-K-SR32/K05
(紧凑杆型)
BTL6-Xyy-M....-A1-S115
(Micropulse AT,柱型)
AT
BTL6-P11-M- _ _ _ _ AT-S11x
微脉冲位移传感器
BTL
Sensors Worldwide
外壳结构总览
P
标准 外置式
R
Z,B W,H K
• 防干扰的RS422/RS485差动驱动接口 • 分辨率取决于分析器 (最大 5 µm) • 便宜的输出选择 • 信号传递可达 500 m • 绝对的位置信息
可供外型:
控制器:
例如: Siemens S7 - SM338 (P) Bosch DPCD und DMC (P) B&R PWP4/NC-302 (M) Schleicher UPM 4U (M) Hydraulik-Ring NC100 (P) Parker EMC 100 (P) Herion µR-01 (P) Schiele PM (PMT) Mod.(P) ESITRON MP100,CPS5 usw.(P) Mitsubishi Melsec-A64BTL(P) WAGO Klemme 750-635 Delta Computer Systems Inc. RMC100 所有的 Balluff 分析卡 (P)
可供外型:
• 绝对量输出信号 • 线性数据输出: +/- 30µm, 不受电线长度影响 • US-速度在系统内部得到监控和修正 • 2 KHz 数据上传速度,不受电线长度影响
也可用于 DEX !!
微脉冲位移传感器
BTL
Sensors Worldwide
CANopen-接口 BTL5-H1...
R
特点:
微脉冲位移传感器
BTL
Sensors Worldwide
Profibus DP BTL5-T1...
特点:
• 位置和速度信号 • 可以运用多达 4 个定位磁铁 • 分辨率 5µm, 通过 BUS可调
• 信号传递达 1200 m
可供外型:
• 绝对量输出信号 • 线性数据输出: +/- 30µm, 不受电线长度影响 • US- 速度在系统内部得到监控和修正 • 1 kHz 数据上传速度,不受电线长度影响 • 根据标准解码器 - 壳型 PNO
数字输出 - 起始/停止:
数字输出 - SSD / SSI 同步串行接口:
BTL5-P
BTL5-S1__-... BTL5-S112-...
标准
标准 5 µm 格雷码
CANopen (CAN-Bus-接口) Profibus DP:
BTL5-H1__-... BTL5-T1__-...
标准解码器 壳型 DS406 解码器 壳型 PNO和 BALLUFF 壳型
微脉冲位移传感器
BTL
P 结构外壳
Sensors Worldwide
开放的感应面
无障碍设计,加大感应面
自由式或导 向式定位磁 铁
电缆或插头连接
安装轨道
与许多其它直线位移传感器通用
微脉冲位移传感器
BTL
R 结构外壳
Sensors Worldwide
短外置式
与许多电位差计的安装相兼容
自由式或导 向式定位磁 铁
新的电子设计
所有选择中最快的输出信号
无需多次测量(循环) 或过滤
高集成的电子部分(ASIC) 电源端极性接反保护
紧凑杆形 结构
EX AT
防爆杆形 结构 经济型 圆柱形结构
短外置式 杆形结构 耐用型, 紧凑杆形 结构
德国生产标准型号 美国生产改进型
微脉冲位移传感器
BTL
Sensors Worldwide
BTL5 特殊外型
BTL5-Xyy-M....-T-3S32 (2 / 3套集成)
BTL5-Xyy-M....-B-DEX.-K/KA.. (密封用于高压 0区和 1区)
微脉冲位移传感器
BTL
Sensors Worldwide
微脉冲位移传感器
BTL
Sensors Worldwide
什么是 BTL ?
可用于所有工业领域的无接触式绝对位置测量系统。
重要的优点: 无接触 绝对位置输出 IP 67
微脉冲位移传感器
BTL
Sensors Worldwide
作用原理
也可用于 DEX !!
微脉冲位移传感器
BTL
Sensors Worldwide
数字式脉冲接口
1 - 3 µ INIT 脉冲 s
PLC
脉冲-宽度-调制 (PWM Pulse-Width-Modulated ) START/STOP
5V 0V 5V
0V
微脉冲位移传感器
BTL
Sensors Worldwide
BTL5-G: -10 - +10 V BTL5-C: 0 - 20 mA
BTL5-E:
可供外型:
4 - 20 mA
也可用于 DEX !!
微脉冲位移传感器
BTL
Sensors Worldwide
模拟信号输出
4mA
20mA
微脉冲位移传感器
BTL
Sensors Worldwide
数字信号输出: 起始 - 停止 BTL5-P/M 特点:
尾端螺纹 不锈钢感应管
完全适用于液压缸和液位检测
将浮子保持在杆 上
磁环或浮子
螺栓固定
提供了紧凑的结构
异常坚固的外壳
坚固的不锈钢外壳,可在大多数恶劣 环境中使用
微脉冲位移传感器
BTL
AT 外壳结构
Sensors Worldwide
创新的管形外壳
在各种应用场合都能可靠安装
仅可用自由 式定位磁铁
8针微型插头
便宜且可靠
可旋转的感应面
允许各种安装方式
Products
微脉冲位移传感器
BTL
Ex 外壳结构
Sensors Worldwide
尾端螺纹 不锈钢感应管
完全适用于液压缸和液位检测
将浮子保持在杆 上
磁环或浮子
刚性管接头
确保最高的防护等级
各种认证
Factory Mutual 及 CENELEC 认证
Class I, Div 1, Groups A, B, C, D Class II/III, Div 1, Groups E, F, G II G Eex d IIC T6 IP68
4/8 Bit-Bus
INIT CPUcontroller P pulse output
• 外壳: 44-芯-SMD (TQFP- 44)
微脉冲位移传感器
BTL
Sensors Worldwide
壳型传感器的定位磁铁
标准磁铁
距离 0,1 - 4 mm 许可偏移 +/- 2 mm
大磁铁
距离 5 - 15 mm 许可偏移 +/- 15 mm
微脉冲位移传感器
BTL
Sensors Worldwide
电位计
导轨
新
过程 1
过程 2
过程 3
Micropulse
保持不变
IP 67
微脉冲位移传感器
BTL
Sensors Worldwide
BTL5 标准外型
BTL5-Xyy-M....-B-S32/KA05
(杆型)
BTL5-Xyy-M....-P-S32/KA05
Sensors Worldwide
BTL 绝对位置测量位移传感器
接通位置
脉冲信号
基准点
增量式玻璃刻度尺
微脉冲位移传感器