实验四 达林算法仿真
实验四离散相似法数字仿真

实验四离散相似法数字仿真【实验目的】掌握离散相似法仿真方法【实验内容】用离散相似法仿真程序(参考课本sp4-4m)重现下图输出Y1的数据和曲线,并与四阶龙格一库塔法比较精度。
【实验的程序】P=[1 0.01 1 0;0 0.085 1 0.17;1 0.01 1 0;0 0.051 1 0.15;1 0.0067 70 0;1 0.15 0.21 0;0 1 130 0;1 0.01 0.1 0;1 0.01 0.0044 0];WIJ=[1 0 1;2 1 1;2 9 -1;3 2 1;4 3 1;4 8 -1;5 4 1;6 5 1;6 7 -0.212;7 6 1;8 6 1;9 7 1];n=9;Y0=1;Yt0=[0 0 0 0 0 0 0 0 0];h=0.001;T=0;T0=0;Tf=5;Nout=7;A=P(:,1);B=P(:,2);C=P(:,3);D=P(:,4);m=length(WIJ(:,1));W0=zeros(n,1);W=zeros(n,n);for k=1:mif(WIJ(k,2)==0);W0(WIJ(k,1))=WIJ(k,3);elseW(WIJ(k,1),WIJ(k,2))=WIJ(k,3);end;end;for i=1:nif(A(i)==0);%求积分环节或积分比例环节各系数FI(i)=1;FIM(i)=h*C(i)/B(i);FIJ(i)=h*h*C(i)/B(i)/2;FIC(i)=1;FID(i)=0; %积分环节系数求取完毕if(D(i)~=0);%若为积分比例,修正dFID(i)=D(i)/B(i);else %求惯性环节或惯性环节比例系数end;elseFI(i)=exp(-h*A(i)/B(i));FIM(i)=(1-FI(i))*C(i)/A(i);FIJ(i)=h*C(i)/A(i)-FIM(i)*B(i)/A(i);FIC(i)=1;FID(i)=0; %惯性环节或惯性环节比例系数求取完毕if(D(i)~=0); %若为惯性比例环节修正 c dFIM(i)=(1-FI(i))*D(i)/A(i);FIJ(i)=h*D(i)/A(i)-FIM(i)*B(i)/A(i);FIC(i)=C(i)/D(i)-A(i)/B(i);FID(i)=D(i)/B(i);elseend;end;end;%求输入作用Y=zeros(n,1);X=Y;y=0;Uk=zeros(n,1 );Ub=Uk;%置初值t=T0:h:Tf;N=length(t);%建立时间序列向量 n维for k=1:N-1Ub=Uk;%保存当前一次输入值Uk=W*Y+W0*Y0;%保存当前ukUdot=(Uk-Ub)/h;%求当前uk导数Uf=2*Uk-Ub;%求下一步输入ufX=FI'.*X+FIM'.*Uk+FIJ'.*Udot;%点运算求取状态和输出Y=FIC'.*X+FID'.*Uf;y=[y,Y(Nout)];end;figure(1)plot(t,y,'g')hold以下运用龙格-库塔法实现:Q=B-D*w;%求出各阵Qn=inv(Q);R=C*w-A;V1=C*w0;Ab=Qn*R;b1=Qn*V1;Y=yt0';y=Y(nout);t=T0;N=round((Tf-T0)/h);%龙哥库塔法for i=1:Nk1=Ab*Y+b1*y0;k2=Ab*(Y+h*k1/2)+b1*y0;k3=Ab*(Y+h*k2/2)+b1*y0;k4=Ab*(Y+h*k3)+b1*y0;Y=Y+h*(k1+2*k2+2*k3+k4)/6;y=[y,Y(nout)];T=[T,t+h];t=t+h;end;figure(2)[T',y'];%输出plot(T,y,'r');%绘图axis([0 5 0 350])实验的结果如下:运用离散化的方法得到的结果运用龙格-库塔方法得到的结果【实验总结:】。
实验4 达林算法仿真
实验四达林算法仿真一、实验目的1.设计达林算法的Simulink仿真模型;2.用S函数实现达林算法;3.观察达林算法中的滞后时间常数和采样周期的选取对系统输出的影响。
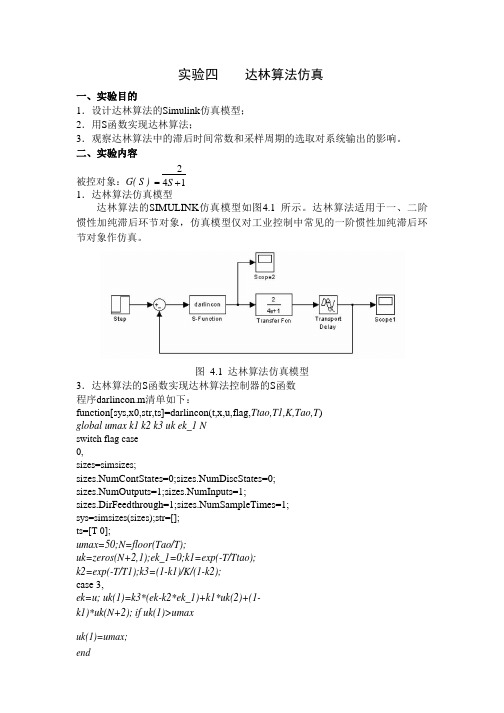
二、实验内容被控对象:G( S )=2 4S+11.达林算法仿真模型达林算法的SIMULINK仿真模型如图4.1所示。
达林算法适用于一、二阶惯性加纯滞后环节对象,仿真模型仅对工业控制中常见的一阶惯性加纯滞后环节对象作仿真。
图 4.1达林算法仿真模型3.达林算法的S函数实现达林算法控制器的S函数程序darlincon.m清单如下:function[sys,x0,str,ts]=darlincon(t,x,u,flag,Ttao,T1,K,Tao,T)global umax k1 k2 k3 uk ek_1 Nswitch flag case0,sizes=simsizes;sizes.NumContStates=0;sizes.NumDiscStates=0;sizes.NumOutputs=1;sizes.NumInputs=1;sizes.DirFeedthrough=1;sizes.NumSampleTimes=1;sys=simsizes(sizes);str=[];ts=[T 0];umax=50;N=floor(Tao/T);uk=zeros(N+2,1);ek_1=0;k1=exp(-T/Ttao);k2=exp(-T/T1);k3=(1-k1)/K/(1-k2);case 3,ek=u; uk(1)=k3*(ek-k2*ek_1)+k1*uk(2)+(1-k1)*uk(N+2); if uk(1)>umaxuk(1)=umax;end1if uk(1)<-umax uk(1)=-umax; endek_1=ek;uk(2:N+2)=uk(1:N+1);sys=[uk(1)];case{1,2,4,9}sys=[];otherwiseerror(['Unhandledflag',num2str(flag)]); end3.参数设置及系统输出曲线程序中的斜体部分就是有关的达林算法实现所用的变量和语句。
计算机仿真实验报告-实验三

一、实验内容:实验三 利用欧拉法、梯形数法和二阶显式Adams 法对RLC 串联电路的仿真1前向欧拉法状态方程:Du CX y Bu AX X m +=+=+•1 然后根据前向欧拉法(其中h 为步长)•++=m m m hX X X 1即可得到系统的差分方程2后向欧拉法根据前向欧拉法得到的系统状态方程,结合后向欧拉法(其中h 为步长)•+++=11m m m hX X X 即可得到系统的差分方程3梯形法由前面的系统状态方程,结合梯形法)(211+••+++=m m m m X X h X X 即可得到系统的差分方程4二阶显式Adams 方法由前面的状态方程,结合二阶显式Adams 方法)51623(12211--++-+=m m m m m F F F h X X 即可得到系统的差分方程但是二阶显式Adams 法不能自起步,要使方程起步,需要知道开始的三个值,但是我们只知道第一个值。
经过分析后,二阶显式Adams 方法精度是二阶的,而梯形法精度也是二阶的,因此我们可以先借助梯形法得到输出的前三个值,以达到起步的目的,然后借助上面得到的差分方程对其进行求解。
二、实验波形:下图为前向欧拉法、后向欧拉法、梯形法、二阶显式Adams 方法的系统差分方程得到相应的输出波形:图1 h=410 时四种方法的输出波形图2 h=56-⨯时四种方法的输出波形10图3 h=510-时四种方法的输出波形图4 h=610-时四种方法的输出波形三、实验分析:由输出波形可以看到各种方法的特点(在图中蓝色线均表示连续系统模型的实际输出波形,红色线表示在对应方法下系统的输出波形。
):1前向欧拉法和二阶显式Adams方法对步长的要求很强。
步长太大,最后的到的结果不是绝对收敛,而是发散。
在小步长下才显得收敛,这也从另一方面验证,步长越小,截断误差越小;2步长不能太小,太小的步长相应的舍入误差和累积误差也会增大;3前向欧拉法也可称为显式欧拉法,后向欧拉法也可称为隐式欧拉法,可以看到,后向欧拉法的稳定域要比前向欧拉法大,计算精度也要高一些。
仿真算法知识点总结

仿真算法知识点总结一、简介仿真算法是一种通过生成模型和运行模拟来研究系统或过程的方法。
它是一种用计算机模拟真实世界事件的技术,可以用来解决各种问题,包括工程、商业和科学领域的问题。
仿真算法可以帮助研究人员更好地理解系统的行为,并预测系统未来的发展趋势。
本文将对仿真算法的基本原理、常用技术和应用领域进行总结,以期帮助读者更好地了解和应用仿真算法。
二、基本原理1. 离散事件仿真(DES)离散事件仿真是一种基于离散时间系统的仿真技术。
在离散事件仿真中,系统中的事件和状态都是离散的,而时间是连续变化的。
离散事件仿真通常用于建模和分析复杂系统,例如生产线、通信网络和交通系统等。
离散事件仿真模型可以用于分析系统的性能、验证系统的设计和决策支持等方面。
2. 连续仿真(CS)连续仿真是一种基于连续时间系统的仿真技术。
在连续仿真中,系统中的状态和事件都是连续的,而时间也是连续的。
连续仿真通常用于建模和分析动态系统,例如电力系统、控制系统和生态系统等。
连续仿真模型可以用于分析系统的稳定性、动态特性和系统参数的设计等方面。
3. 混合仿真(HS)混合仿真是一种同时兼具离散事件仿真和连续仿真特点的仿真技术。
混合仿真可以用于建模和分析同时包含离散和连续过程的系统,例如混合生产系统、供应链系统和环境系统等。
混合仿真模型可以用于分析系统的整体性能、协调离散和连续过程以及系统的优化设计等方面。
4. 随机仿真随机仿真是一种基于概率分布的仿真技术。
在随机仿真中,系统的状态和事件都是随机的,而时间也是随机的。
随机仿真通常用于建模和分析具有随机性质的系统,例如金融系统、天气系统和生物系统等。
随机仿真模型可以用于分析系统的风险、概率特性和对策选择等方面。
5. Agent-Based ModelingAgent-based modeling (ABM) is a simulation technique that focuses on simulating the actions and interactions of autonomous agents within a system. This approach is often used for modeling complex and decentralized systems, such as social networks, biologicalecosystems, and market economies. In ABM, individual agents are modeled with their own sets of rules, behaviors, and decision-making processes, and their interactions with other agents and the environment are simulated over time. ABM can be used to study the emergent behavior and dynamics of complex systems, and to explore the effects of different agent behaviors and interactions on system-level outcomes.三、常用技术1. Monte Carlo方法蒙特卡洛方法是一种基于随机模拟的数值计算技术。
实验四达林算法仿真[整理]
![实验四达林算法仿真[整理]](https://img.taocdn.com/s3/m/45d423bdd0f34693daef5ef7ba0d4a7302766c00.png)
实验四 达林算法仿真一、实验目的1.设计达林算法的Simulink 仿真模型;2.用S 函数实现达林算法;3.观察达林算法中的滞后时间常数和采样周期的选取对系统输出的影响。
二、实验内容 被控对象:142)(+=S S G 1.达林算法仿真模型达林算法的SIMULINK 仿真模型如图4.1所示。
达林算法适用于一、二阶惯性加纯滞后环节对象,仿真模型仅对工业控制中常见的一阶惯性加纯滞后环节对象作仿真。
图4.1 达林算法仿真模型1.达林算法的S 函数实现达林算法控制器的S 函数程序darlincon.m 清单如下:function[sys,x0,str,ts]=darlincon(t,x,u,flag,Ttao,T1,K,Tao,T )global umax k1 k2 k3 uk ek_1 Nswitch flagcase 0,sizes=simsizes;sizes.NumContStates=0;sizes.NumDiscStates=0;sizes.NumOutputs=1;sizes.NumInputs=1;sizes.DirFeedthrough=1;sizes.NumSampleTimes=1;sys=simsizes(sizes);str=[];ts=[T 0];umax=50;N=floor(Tao/T);uk=zeros(N+2,1);ek_1=0;k1=exp(-T/Ttao);k2=exp(-T/T1);k3=(1-k1)/K/(1-k2);case 3,ek=u;uk(1)=k3*(ek-k2*ek_1)+k1*uk(2)+(1-k1)*uk(N+2);if uk(1)>umaxuk(1)=umax;endif uk(1)<-umaxuk(1)=-umax;endek_1=ek;uk(2:N+2)=uk(1:N+1);sys=[uk(1)];case{1,2,4,9}sys=[];otherwiseerror(['Unhandled flag',num2str(flag)]);end3.参数设置及系统输出曲线程序中的斜体部分就是有关的达林算法实现所用的变量和语句。
matlab仿真实验报告
matlab仿真实验报告Matlab仿真实验报告引言:Matlab是一种广泛应用于科学和工程领域的数值计算软件,它提供了强大的数学和图形处理功能,可用于解决各种实际问题。
本文将通过一个具体的Matlab 仿真实验来展示其在工程领域中的应用。
实验背景:本次实验的目标是通过Matlab仿真分析一个电路的性能。
该电路是一个简单的放大器电路,由一个输入电阻、一个输出电阻和一个放大倍数组成。
我们将通过Matlab对该电路进行仿真,以了解其放大性能。
实验步骤:1. 定义电路参数:首先,我们需要定义电路的各个参数,包括输入电阻、输出电阻和放大倍数。
这些参数将作为Matlab仿真的输入。
2. 构建电路模型:接下来,我们需要在Matlab中构建电路模型。
可以使用电路元件的模型来表示电路的行为,并使用Matlab的电路分析工具进行仿真。
3. 仿真分析:在电路模型构建完成后,我们可以通过Matlab进行仿真分析。
可以通过输入不同的信号波形,观察电路的输出响应,并计算放大倍数。
4. 结果可视化:为了更直观地观察仿真结果,我们可以使用Matlab的图形处理功能将仿真结果可视化。
可以绘制输入信号波形、输出信号波形和放大倍数的变化曲线图。
实验结果:通过仿真分析,我们得到了以下实验结果:1. 输入信号波形与输出信号波形的对比图:通过绘制输入信号波形和输出信号波形的变化曲线,我们可以观察到电路的放大效果。
可以看到输出信号的幅度大于输入信号,说明电路具有放大功能。
2. 放大倍数的计算结果:通过对输出信号和输入信号的幅度进行计算,我们可以得到电路的放大倍数。
通过比较不同输入信号幅度下的输出信号幅度,可以得到放大倍数的变化情况。
讨论与分析:通过对实验结果的讨论和分析,我们可以得出以下结论:1. 电路的放大性能:根据实验结果,我们可以评估电路的放大性能。
通过观察输出信号的幅度和输入信号的幅度之间的比值,可以判断电路的放大效果是否符合设计要求。
计控实验3 大林算法
T
2、用MATLAB和Simulink仿真并检查输出结果是否符 合控制系统设计要求。
二、实验内容 2 S e 1、已知被控对象的传递函数 G ( s) s( s 1) ,若采样期 T=1s,用大林算法设计数字控制器D(Z),并用MATLAB 检验系统的性能。
HG(Z)
r(t) T R(Z) E(Z) × ○ D(Z) T H0(S) G(S)
实验三:大林算法
一、实验目的:
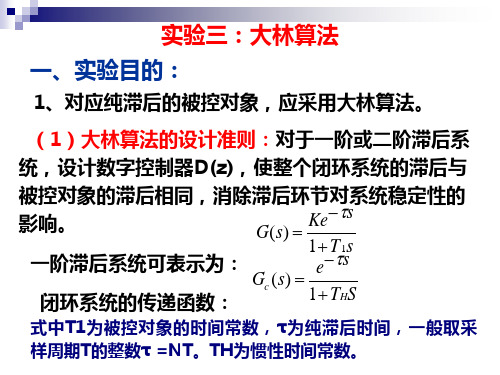
1、对应纯滞后的被控对象,应采用大林算法。 (1)大林算法的设计准则:对于一阶或二阶滞后系 统,设计数字控制器D(z),使整个闭环系统的滞后与 被控对象的滞后相同,消除滞后环节对系统稳定性的 s Ke 影响。 G( s ) 1 T 1s 一阶滞后系统可表示为: e s Gc (s) 1 THS 闭环系统的传递函数:
(二)Simulink的模块库
通用模块
连续模块 非连续模块 离散模块 接收模块
输入信号源
数学运算 端口与子系统
1.输入信号源模 块库(Sources)
主要有: Constant(常数) Step(阶跃信号) Ramp(线性信号) Sine Wave(正弦信号) Signal Generator(信 号发生器) From File(文件获取) From Workspace(矩阵 读数据) Clock(仿真时钟) In(输入模块)
1、启动MATLAB
下载软件或用光盘进行MATLAB的安装。
点击 图标 ,启动MATLAB,出现操作窗口:
操作界面分为以下几部分: (1)菜单 (2)工具栏 (3)工作空间窗口
(4)命令窗口 (5)历史命令窗口口
命令 窗口
历史 命令 窗口 开始按钮
达林算法的应用研究
相似文献(1条) 1.期刊论文 张秀玲.ZHANG Xiu-ling 达林算法在电阻炉温度控制系统中的应用 -基础自动化2000,7(3)
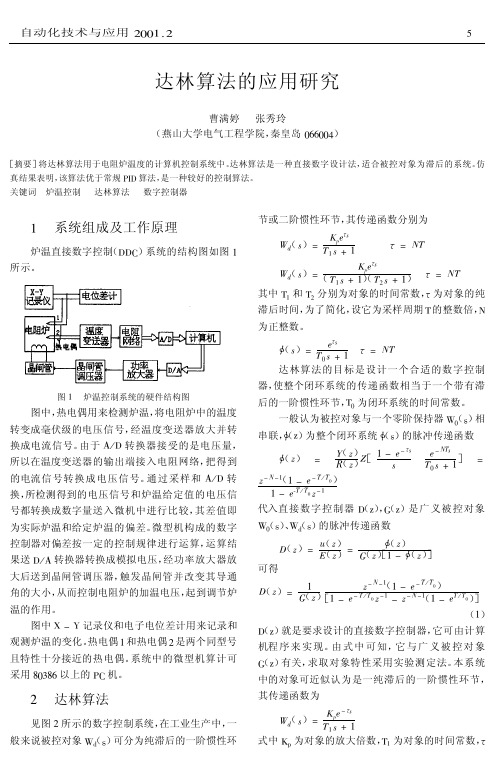
介绍了将达林算法用于电阻炉温度的计算机控制系统中的结构、原理.阐述了达林算法作为一种直接数字设计法,适用于被控对象为滞后的系统.仿真结 果表明,该算法优于常规PID算法,是一种较好的控制算法.
( +) ( +) 3 " ( + )$ 5 ( +) [’ / " ( +) ] 4
( 6) 就是要求设计的直接数字控制器, 它可由计算 & 机程 序 来 实 现。 由 式 中 可 知, 它与广义被控对象 ( 6) 有关, 求取对象特性采用实验测定法。 本系统 7 中的对象可近似认为是一纯滞后的一阶惯性环节, 其传递函数为 %&’ /!# (’ # ) ’ 式中 89 为对象的放大倍数, 4’ 为对象的时间常数, ! !( " # )$
通过 * 变换求得 ( ) )# ( 代入 (() 式得 ( )) (( $ % $ & ’ &( ) $ () (( $ % $ & ’ &( ) & ’ &( & ’ &( $ ( $ $ ) [( $ % ] *( ) (( $ % $ & ’!) ) $ ,$! + ( $ % 经简化得到 . $ /0 $ ( ( ) )# ( $ 1) $ ( $(( $ 1 ) ) $ ,$! 式中 ( $ % $ & ’! / # .% $ & ’ &( $ & ’ &( *( + ( $ % 根据 & ( *)! + ( *) ( *) 得 %, . # 1 # % $ &
编码仿真实验报告(3篇)

第1篇实验名称:基于仿真平台的编码算法性能评估实验日期:2023年4月10日实验地点:计算机实验室实验目的:1. 了解编码算法的基本原理和应用场景。
2. 通过仿真实验,评估不同编码算法的性能。
3. 分析编码算法在实际应用中的优缺点。
实验环境:1. 操作系统:Windows 102. 编译器:Visual Studio 20193. 仿真平台:MATLAB 2020a4. 编码算法:Huffman编码、算术编码、游程编码实验内容:1. 编写Huffman编码算法,实现字符序列的编码和解码。
2. 编写算术编码算法,实现字符序列的编码和解码。
3. 编写游程编码算法,实现字符序列的编码和解码。
4. 在仿真平台上,分别对三种编码算法进行性能评估。
实验步骤:1. 设计Huffman编码算法,包括构建哈夫曼树、编码和解码过程。
2. 设计算术编码算法,包括编码和解码过程。
3. 设计游程编码算法,包括编码和解码过程。
4. 编写仿真实验代码,对三种编码算法进行性能评估。
5. 分析实验结果,总结不同编码算法的优缺点。
实验结果及分析:一、Huffman编码算法1. 编码过程:- 对字符序列进行统计,计算每个字符出现的频率。
- 根据频率构建哈夫曼树,叶子节点代表字符,分支代表编码。
- 根据哈夫曼树生成编码,频率越高的字符编码越短。
2. 解码过程:- 根据编码,从哈夫曼树的根节点开始,沿着编码序列遍历树。
- 当遍历到叶子节点时,输出对应的字符。
3. 性能评估:- 编码长度:Huffman编码的平均编码长度最短,编码效率较高。
- 编码时间:Huffman编码算法的编码时间较长,尤其是在构建哈夫曼树的过程中。
二、算术编码算法1. 编码过程:- 对字符序列进行统计,计算每个字符出现的频率。
- 根据频率,将字符序列映射到0到1之间的实数。
- 根据映射结果,将实数序列编码为二进制序列。
2. 解码过程:- 对编码的二进制序列进行解码,得到实数序列。
仿真算法知识点总结图解

仿真算法知识点总结图解一、仿真算法的基本原理1.1 仿真概念仿真是指通过模拟实际系统的运行过程来预测系统性能、评估方案、优化设计等的一种方法。
仿真可以用于模拟现实世界中的各种系统,如物理系统、信息系统、经济系统等。
1.2 仿真模型仿真模型是对实际系统的简化描述,它包括系统的结构、行为规则、参数等信息。
通过建立仿真模型,我们可以在计算机上进行模拟实验,以探索系统的性能、行为特征和优化方案。
1.3 仿真算法的分类根据系统类型和仿真目的的不同,仿真算法可以分为连续系统仿真算法和离散系统仿真算法。
连续系统仿真算法适用于连续变量的系统,如物理系统和控制系统;离散系统仿真算法适用于离散事件的系统,如排队系统和生产系统。
1.4 仿真算法的基本步骤仿真算法的基本步骤包括建模、验证、实验设计、模拟运行和结果分析等。
建模是仿真算法的核心,它涉及到系统结构的抽象化、参数的设定、规则的定义等。
验证是指通过比较仿真结果与实际观测数据的一致性来检验仿真模型的有效性。
实验设计是指设计合理的仿真实验以获取有用的信息。
模拟运行是指在计算机上运行仿真模型进行试验。
结果分析是指对仿真结果进行统计分析和评价。
1.5 仿真算法的评价指标仿真算法的评价指标包括仿真精度、仿真效率和仿真可信度等。
仿真精度是指仿真结果与实际观测数据的一致程度;仿真效率是指仿真模型的计算速度和资源消耗;仿真可信度是指仿真结果的合理性和可靠性。
二、连续系统仿真算法2.1 连续系统方程的数值解法连续系统方程通常是由微分方程或偏微分方程描述的,为了在计算机上进行仿真,需要采用数值解法对这些方程进行离散化处理。
常用的数值解法包括欧拉法、梯形法、四阶龙格-库塔法等。
2.2 连续系统仿真的模拟程序设计连续系统仿真的模拟程序通常包括系统方程的离散化模型、时间步长控制、数值解法的选择、边界条件处理等内容。
设计一个高效、稳定的连续系统仿真程序是非常具有挑战性的。
2.3 连续系统仿真的优化方法针对连续系统仿真的高维度、非线性等特点,通常需要采用一些优化方法来提高仿真效率和精度。
matlab仿真算法流程
matlab仿真算法流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!1. 问题定义与分析:明确要解决的问题或研究的系统。
确定输入和输出变量。
虚拟仿真实验实验报告

一、实验名称:虚拟仿真实验二、实验目的本次虚拟仿真实验旨在通过模拟真实实验场景,使学生能够在安全、高效、可控的环境中学习和掌握实验原理、方法和技能,提高学生的实践能力和创新意识。
三、实验内容本次实验选择了以下内容进行虚拟仿真:1. 物理实验:单级放大电路- 目的:熟悉软件使用方法,掌握放大器静态工作点仿真方法,了解放大器性能。
- 实验步骤:使用虚拟仪器搭建单级放大电路,通过调整电路参数,观察静态工作点、电压放大倍数、输入电阻、输出电阻等性能指标的变化。
2. 化学实验:傅立叶级数仿真- 目的:通过MATLAB编程实现周期函数的傅立叶级数分解,绘制频谱图和重构函数图像,加深对傅立叶级数的理解。
- 实验步骤:编写MATLAB程序,对给定的周期函数进行傅立叶级数分解,绘制频谱图和重构函数图像,分析不同频率分量对函数形状的贡献程度。
3. 土木工程实验:VISSIM仿真- 目的:学习VISSIM软件,理解和掌握城市交通和公共交通运行的交通建模方法。
- 实验步骤:使用VISSIM软件搭建城市交通仿真模型,模拟不同交通状况下的交通流运行,分析交通信号、车道设置等因素对交通流的影响。
四、实验结果与分析1. 物理实验:单级放大电路- 实验结果表明,通过调整电路参数,可以改变放大器的静态工作点、电压放大倍数、输入电阻、输出电阻等性能指标。
- 分析:该实验加深了对放大器工作原理和性能指标的理解,为实际电路设计和调试提供了理论依据。
2. 化学实验:傅立叶级数仿真- 实验结果表明,通过MATLAB编程可以实现周期函数的傅立叶级数分解,并绘制频谱图和重构函数图像。
- 分析:该实验加深了对傅立叶级数分解原理的理解,为后续信号处理和分析提供了基础。
3. 土木工程实验:VISSIM仿真- 实验结果表明,通过VISSIM软件可以模拟不同交通状况下的交通流运行,分析交通信号、车道设置等因素对交通流的影响。
- 分析:该实验加深了对城市交通运行规律和交通工程设计的理解,为实际交通规划和设计提供了参考。
过程控制仿真

过程控制仿真所在院系:所在班级:学生姓名:学生学号:实验一一阶单容上水箱对象特性测试实验一.实验目的1.熟悉单容水箱的数学模型及其阶跃响应曲线。
2.根据由实际测得的单容水箱液位的阶跃响应曲线,用相关的方法分别确定它们的参数。
二.实验设备AE2000A型过程控制实验装置。
配置:万用表、上位机软件、计算机、RS232-485转换器1只、串口线1根、实验连接线。
三.系统结构框图单容水箱如图1-1所示:图1-1、单容水箱系统结构图四.实验原理阶跃响应测试法是系统在开环运行条件下,待系统稳定后,通过调节器或其他操作器,手动改变对象的输入信号(阶跃信号)。
同时,记录对象的输出数据或阶跃响应曲线,然后根据已给定对象模型的结构形式,对实验数据进行处理,确定模型中各参数。
图解法是确定模型参数的一种实用方法,不同的模型结构,有不同的图解方法。
单容水箱对象模型用一阶加时滞环节来近似描述时,常可用两点法直接求取对象参数。
如图1-1所示,设水箱的进水量为Q 1,出水量为Q 2,水箱的液面高度为h ,出水阀V 2固定 于某一开度值。
根据物料动态平衡的关系,求得:在零初始条件下,对上式求拉氏变换,得:式中,T 为水箱的时间常数(注意:阀V 2的开度大小会影响到水箱的时间常数),T=R 2*C ,K=R 2为过程的放大倍数,R 2为V 2阀的液阻,C 为水箱的容量系数。
令输入流量Q 1(S )=R O /S ,R O 为常量,则输出液位的高度为:当t=T 时,则有:h(T)=KR 0(1-e -1)=0.632KR 0=0.632h(∞) 即 h(t)=KR 0(1-e-t/T)当t —>∞时,h (∞)=KR 0,因而有 K=h (∞)/R0=输出稳态值/阶跃输入 式(1-2)表示一阶惯性环节的响应曲线是一单调上升的指数函数,如图1-2所示。
当由实验求得图1-2所示的阶跃响应曲线后,该曲线上升到稳态值的63%所对应时间,就是水箱的时间常数T ,该时间常数T 也可以通过坐标原点对响应曲线作切线,切线与稳态值交点 所对应的时间就是时间常数T ,其理论依据是:上式表示h (t )若以在原点时的速度h (∞)/T 恒速变化,即只要花T 秒时间就可达到稳态值h (∞)。
达林算法在z域和δ域的仿真

达林算法在z域和δ域的仿真
陈雪梅;王萍
【期刊名称】《天津工业大学学报》
【年(卷),期】2004(023)001
【摘要】用MATLAB软件中的Simulink工具对达林算法在z域的振铃现象和消除振铃现象的算法进行了仿真,并把达林算法进行了δ变换,利用δ变换在小采样周期情况下近似连续域的性质,用MATLAB软件对控制器的输出进行仿真.研究指出,在δ域用达林算法设计控制器,没有振铃现象,而且采样周期域越小,控制效果越好.【总页数】3页(P73-75)
【作者】陈雪梅;王萍
【作者单位】天津工业大学,计算机技术与自动化学院,天津,300160;天津工业大学,计算机技术与自动化学院,天津,300160
【正文语种】中文
【中图分类】TP273.1
【相关文献】
1.累量域高分辨率二维波达方向估计算法 [J], 姚敏立;殷勤业
2.适用任意阵列的变换域二维波达角快速估计算法 [J], 闫锋刚;金铭;乔晓林
3.累量域虚拟阵列二维波达方向估计算法 [J], 向前;林春生
4.基于直接数据域方法的快速波达方向估计算法 [J], 邵尉;钱祖平
5.基于空间特征的多用户循环累量域波达方向估计算法 [J], 姚敏立;金梁;殷勤业
因版权原因,仅展示原文概要,查看原文内容请购买。
达林算法在z域和δ域的仿真
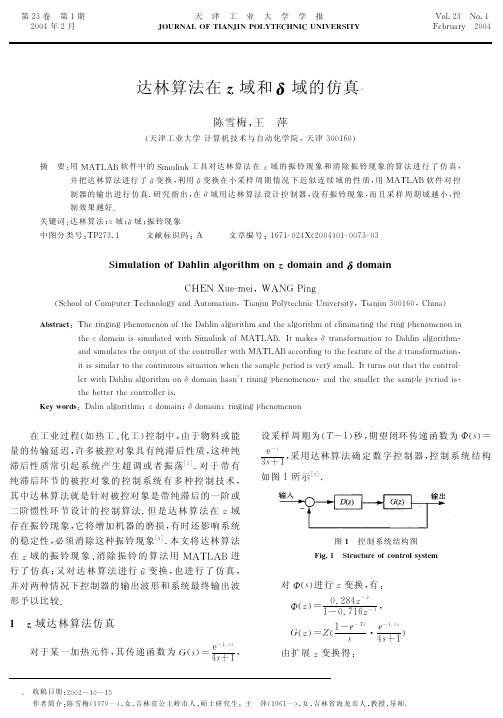
图 H! 控制系统结构图 ( 5 K H!1 : ? L B : L ? 3; < B ; 7 : ? ; > 4 4 : 3 C 6 G
在 Y 域的振铃 现 象 & 消 除 振 铃 的 算 法 用 B73 a 7 6进 行了仿 真 % 又 对 达 林 算 法 进 行- 变 换 " 也 进 行 了 仿 真" 并对两种情况下控制器的输出波形和系统最终输出波 形予以比较 #
图 J! * 域系统输出波形 ( 5 K J! M 8 A 3 < ; ? C; < 4 4 : 3 C< ; ? *9 ; C 8 5 7 6 G
法# 由 Y 变换特性可知 $ 采 样 周 期 很 小 时$ 采 用Y 变 换 会使离散模型的零 ( 极点 密 集 于 Y 平 面 上YY# 附 近 $ 极易产生建模误差 ) 在有限字长的计算机上实现时会 带来更大的量化误差和非 线 性 效 应 # - 变 换 的 特 点 是$ 在小采样周期下 $ 克服 - 离散模 型 近 似 于 原 连 续 模 型 $ 了 Y 变换的上述不足 ) 在数字计算机上实现时有更好 的数值特性 # 特别是 很 多 为 人 熟 知 的 连 续 域 设 计 概 念 和设计方法 $ 都可以近似直接用于- 离散域设计 $ 不必
如热工 & 化工 # 控制中 " 由于物料或能 !! 在工业过程 ! 量的传输延迟 " 许多被控对象具有纯滞后性质 " 这种纯
#( 滞后性质常引起 系 统 产 生 超 调 或 者 振 荡 ’ 对于带有 )
设采样周期为 ! # 秒" 期望闭环传递函数为 .! # :T# . Y
T . , " 采用达林算 法 确 定 数 字 控 制 器 " 控制系统结构 " . Z# "( 如图 # 所示 ’ #
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四 达林算法仿真
一、实验目的
1.设计达林算法的Simulink 仿真模型;
2.用S 函数实现达林算法;
3.观察达林算法中的滞后时间常数和采样周期的选取对系统输出的影响。
二、实验内容 被控对象:1
42)(+=S S G 1.达林算法仿真模型
达林算法的SIMULINK 仿真模型如图4.1所示。
达林算法适用于一、二阶惯性加纯滞后环节对象,仿真模型仅对工业控制中常见的一阶惯性加纯滞后环节对象作仿真。
图4.1 达林算法仿真模型
1.达林算法的S 函数实现
达林算法控制器的S 函数程序darlincon.m 清单如下:
function[sys,x0,str,ts]=darlincon(t,x,u,flag,Ttao,T1,K,Tao,T )
global umax k1 k2 k3 uk ek_1 N
switch flag
case 0,
sizes=simsizes;
sizes.NumContStates=0;sizes.NumDiscStates=0;
sizes.NumOutputs=1;sizes.NumInputs=1;
sizes.DirFeedthrough=1;sizes.NumSampleTimes=1;
sys=simsizes(sizes);str=[];
ts=[T 0];
umax=50;N=floor(Tao/T);
uk=zeros(N+2,1);ek_1=0;k1=exp(-T/Ttao);
k2=exp(-T/T1);k3=(1-k1)/K/(1-k2);
case 3,
ek=u;
uk(1)=k3*(ek-k2*ek_1)+k1*uk(2)+(1-k1)*uk(N+2);
if uk(1)>umax
uk(1)=umax;
end
if uk(1)<-umax
uk(1)=-umax;
end
ek_1=ek;
uk(2:N+2)=uk(1:N+1);
sys=[uk(1)];
case{1,2,4,9}
sys=[];
otherwise
error(['Unhandled flag',num2str(flag)]);
end
3.参数设置及系统输出曲线
程序中的斜体部分就是有关的达林算法实现所用的变量和语句。
假设对象模型为s e s s G 301
42)(-+=,要求闭环系统时间常数s T 5.4=τ,取采样周期T=1s 。
先按对象的参数去设置控制器参数,然后运行仿真模型。
仿真结果如图4.2所示。
若欲缩短调节时间,可将闭环时间常数改为s T 2=τ,采样周期仍为T=1s ,再次仿真。
仿真结果如图4.3所示。
(a)系统输出 (b )控制量
图4.2 闭环时间常数为4.5s 时的仿真结果
(a)系统输出(b)控制量
图4.3 闭环时间常数为2s时的仿真结果
从图4.2中可见,动态过程确实缩短了,请注意控制量也相应增大了,这是符合实际”情况的。
观察图4.2和图4.3的系统输出都没有纹波出现,说明在纯滞后时间是采样周期的整数倍时,无论闭环系统时间常数丁。
是大于还是小于惯性时间常数,系统输出都是没有纹波的。
倘若纯滞后时间不是采样周期的整数倍时,系统输出将会发生波动。
设 =2s,采样周期改为T=1.3s,再次仿真,仿真结果如图4.4所示。
若再缩短采样周期,系统的输出波动将更厉害,可以试做一下。
(a)系统输出(b)控制量
图4.4闭环时间常数为2s时,采样周期为1.3s的仿真结果
三、实验预习要求
(1)掌握达林算法;
(2)设计达林算法控制器。
四、实验报告要求
(1)记录不同滞后时间常数和采样周期时系统输出曲线;
(2)分析不同滞后时间常数和采样周期时系统输出曲线的影响。
4.5,4,2,3,1
2,4,2,3,1
2,4,2,3,1.3。