顶升油缸及系统
塔式起重机顶升作业介绍(丰汇)
• 下面演示一下山东丰汇设备技术有限公司 FZQ系列塔式起重机的顶升过程动画。
通用塔机顶升事故几点主要因素
• 顶升工况风力超标 • 回转未锁定,或固定不牢 • 平衡未调整或调整不正确 • 顶升时塔身高度超出许可 • 顶升通道卡阻 • 顶升过程塔机与周围固定结构干涉碰撞 • 导向滚轮或滑块调整间隙不当(过大或过小) • 液压系统超压或系统压力调整不当
◆图3
◆3、拆开承座与塔身之间的连接抱瓦,操纵引入装置辅 助卷扬机放出适量钢丝绳使引入装置的吊钩下降不少于 6m,操纵油缸伸出,慢慢顶升,此时承座接头与塔身 接头开始分离,见图4。
◆4、继续顶升,当顶升支撑杆略高于5号顶升耳板时,操 纵支撑杆使之摆至顶升耳板支座上方,操纵油缸收缩, 使支撑杆可靠卡入5号顶升耳板支座内,见图Байду номын сангаас。
• 油管爆裂破损 • 液压锁失灵或未设 • 未设平衡阀 • 密封件损坏 • 安全阀调定压力不当 • 液压缸杠杆折断
• 谢谢大家
(注:至此完成一节塔身标准节的顶升、安装作业。)
◆11、附着节顶升安装作业与标准节相同,附着节顶升安 装后通过附着撑杆与建筑物连接。
◆12、按以上程序可继续完成塔身接高作业,直至所需高 度,顶升安装作业结束后,收回活塞杆。
以上为FZQ系列动臂塔机的顶升安装过程,建筑用小型 平臂塔机的顶升过程与之类似。
自升塔式起重机顶升知识简介
顶升型式
◆根据顶升机构传动方式的不同,可分为绳轮顶升机构、 链轮顶升机构、齿条顶升机构、丝杠顶升机构和液压顶 升机构等5种。其中绳轮和链轮顶升机构构造简单,但 不平稳,采用较少;液压顶升机构具有构造简单、工作 可靠、平稳、安全、操纵方便、爬升速度快等诸多优点, 得到了广泛的应用。
塔式起重机顶升系统

塔式起重机顶升系统
说明
1、顶升过程中自始至终必须将起重臂锁住,严禁起重臂回转,保证起重臂与引入标准节的方向一致。
2、若要连续加几节标准节,则每加完一节后,在起吊下一节标准节前,塔身标准节四角各主弦杆和下支座必须连结牢固,全部螺栓必须拧紧。
3、所加标准节的踏步必须与已有塔身标准节的踏步方向保持统一。
4、每次顶升前必须放松电缆以免顶升时拉断电缆。
5、加节完毕后,新顶升塔身运行半小时后必须重新拧紧标准节螺栓。
6、每次顶升时,应派专人检查油缸活塞端部顶升横梁销轴是否准确可靠地嵌在标准节的顶升支板槽内,搭接长度是否足够。
还应检查套架上的爬爪在顶升过程中是否有牵挂现象,在顶升油缸回收时是否可靠搁置在标准节的顶升支板槽内。
塔吊锚固、顶升施工实施方案
塔吊锚固、顶升施工实施方案一、项目背景我们的项目位于繁华的都市中心,高楼林立,竞争激烈。
为了确保工程进度和质量,我们决定采用塔吊进行施工。
塔吊的锚固和顶升是施工过程中的关键环节,直接影响到工程的安全和效率。
二、塔吊选型1.根据工程需求,我们选择了QTZ63型塔吊,该型号具有起升高度高、作业半径大、载重能力强等特点,能满足施工现场的需求。
2.塔吊的锚固和顶升系统采用了先进的自动控制系统,确保了施工过程中的安全性和稳定性。
三、锚固方案1.锚固基础(1)采用预应力混凝土管桩基础,桩径为500mm,桩长为20m,桩顶露出地面1m。
(2)基础承台尺寸为4m×4m,厚度为1m,混凝土强度等级为C30。
2.锚固方法(1)采用四根直径32mm的高强度螺栓,将塔吊与基础承台连接。
(2)螺栓连接处采用防腐蚀处理,确保连接的可靠性。
3.锚固检查(1)在施工过程中,定期对锚固基础进行检查,发现问题及时处理。
(2)检查内容包括螺栓紧固程度、基础沉降、塔吊倾斜等。
四、顶升方案1.顶升系统(1)采用液压顶升系统,包括顶升油缸、液压泵站、控制系统等。
(2)顶升油缸直径为160mm,行程为2m,顶升速度为0.5m/min。
2.顶升操作(1)顶升前,对塔吊进行检查,确保各项指标正常。
(2)开启液压泵站,使顶升油缸伸长,将塔吊顶升到预定高度。
(3)调整塔吊位置,使其与基础承台对齐。
(4)紧固螺栓,完成顶升过程。
3.顶升检查(1)顶升过程中,密切监测塔吊的倾斜和沉降情况。
(2)顶升完成后,对塔吊进行检查,确保各项指标正常。
五、施工组织1.施工队伍(1)选拔具有丰富经验的施工队伍,进行专业培训。
(2)施工队伍包括塔吊司机、信号工、维修工等。
2.施工计划(1)制定详细的施工计划,明确施工任务、时间节点、质量标准等。
(2)施工计划应包括塔吊安装、调试、运行、拆除等环节。
3.安全管理(1)建立健全安全管理规章制度,确保施工安全。
(2)对施工人员进行安全教育,提高安全意识。
液压顶升系统的使用与维护(2篇)

液压顶升系统的使用与维护塔式起重机的液压系统还算比较简单,只要使用维护得好,一般说来,故障率是比较少的。
但是如果忽视维护或者使用不当,就会出现各种故障。
而且由于系统内部不易观察,出了故障往往不易一下子就找出原因,以致影响塔机的使用。
下面就将使用中应当特别注意的问题分述如下:(1)液压油的使用与维护液压传动系统以油液作为传递能量的工作介质,除了正确选用液压油外,还必须使油液保持清洁,特别要防止油液中混入杂质和污物。
经验证明,液压系统经常发生的各种故障、堵塞和损坏事故,往往就与液压油变质、杂质、污染及密封不严有关。
液压系统使用维护的关键是保持系统和液压油的清洁,为此应注意:①油箱中的液压油应经常保持正常的油面。
②液压油必须经过严格的过滤。
滤油器应当经常清洗,去除滤油网上的杂质,发现损坏要及时更换。
③系统中的油液应经常检查,并根据工作情况定期更换。
尤其是新投入使用的系统设备,容易混入金属屑或其他杂质,要提早换油。
④一般情况下,液压元件不要轻易拆卸。
但是在发生堵塞,往往又必须拆卸时,要用煤油清洗干净,特别是小孔,一定要防止堵塞。
而且清洗后要放在干净的地方,及时装配好,特别注意防止金属屑、锈块、灰尘、棉纱等杂质落人元件中。
(2)防止空气进入液压系统空气进入油液中会产生气泡,形成空穴现象。
到了高压区,在压力作用下,这些气泡急剧受到压缩,产生噪声,引起局部过热,使液压元件和液压油受到损坏。
空气的可压缩性大,还会使油缸产生爬行现象,破坏系统工作的平稳性。
为此,要注意做到:①系统的回油管,必须插入到油箱的油面以下,防止回油带入空气。
②油箱的油面要尽量大些,吸人侧和回油侧要用隔板隔开,以达到消除气泡的目的。
③在管路及液压缸的最高部分设置气孔,在起动时应放掉其中的空气。
(3)防止油温过高注意检查工作温度,一般应保持在35~60C之间,应尽量控制油的温度,使其不超过上述允许值的上限。
①经常注意保持油箱中的正确油位,使系统中的油液有足够的循环冷却条件。
移动式液压顶升系统简介及其应用
重 机
0 概 述
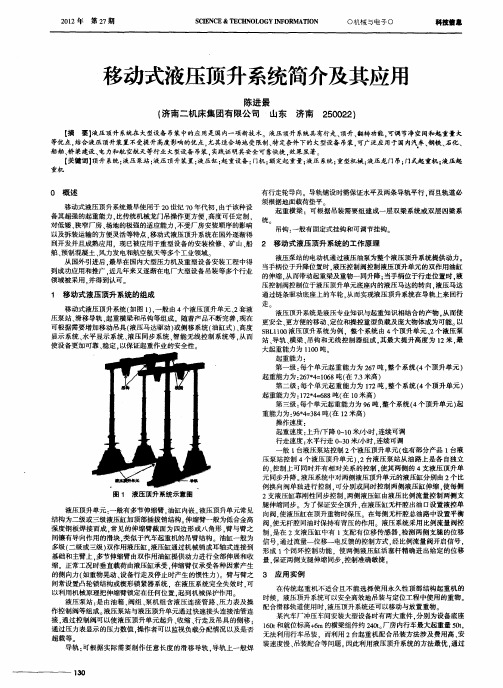
有行走轮导 向。导轨铺设时需保证水平 及两条 导轨平行 . 而且轨道必 须根据地 面载荷垫平 移动式液压顶 升系统最早使用于 2 世纪 7 O O年代初 . 由于该种设 起重横梁 :可根据 吊装需要组 建成一 层双梁系统或双层 四梁 系 备其超强的起重能力 , 比传统机械龙 门吊操作更方便 。 高度可任定制 , 统。 对低矮 、 狭窄厂房 、 场地的极强 的适应能力 , 不受厂房安装顺 序的影响 吊钩: 一般有 固定式挂钩和可调节挂钩。 以及拆装运输的方 便灵活 等特点 . 移动式液压顶升系统在国外逐渐得 到开发并且成熟应用 ,现已被应用于重型设备的安装检修 、矿山、 船 2 移 动 式液 压 顶 升 系统 的工 作 原理 舶、 预制混凝土 、 风力发电和航空航天等多个工业领 域。 液压泵站 的电动机通过液压油泵为整个液压顶升系统提供动力 。 从 国外引进后 . 最早 在国内大型压力机及重型设备安装工程中得 当手柄位于升降位置时 . 液压控制 阀控制液压顶升单元 的双作用 油缸 到成功应用和推广 . 近几年来 又逐渐在电厂大型设备 吊装等多个行 业 的伸缩 , 而带动起重梁及重物一 同升降 ; 从 当手柄位于行走位置时 。 液 领域被采用 . 并得到认可 压控制阀控制位于液压顶升单元底座 内的液压马达的转向 . 液压马达 通过链条驱动底 座上 的车轮 . 从而实现液压顶升系统在导轨上来回行 1 移动式液压顶升系统 的组成 移动式液压顶升系统( 如图 1 , )一般 由 4 个液压顶升单元 、 套液 2 液压顶升系统是液压专业知识 与起重知识相结合的产物 . 从而使 压泵站 、 滑移导轨 、 起重横梁和吊钩等组成 。随着产品不断完善 , 现在 更安全 、 更方便的移动 、 定位和操控重型负载及庞大物体成为可能。 以 可根据需要增加移动 吊具( 液压 马达驱动 ) 或侧移系统 ( 油缸式 )高度 、 S L 1( B 10 液压顶升系统为例 .整个 系统 由 4 3 个顶 升单元 、 个 液压泵 2 显示 系统 、 水平显示系统 、 液压 同步系统 、 智能无线控制 系统等 , 从而 站、 导轨 、 横梁 、 吊钩和无线控制器组成 , 其最大 提升高度为 l 米 , 2 最 使设备更加可靠 、 稳定 , 以保证起 重作业 的安全性。 大起重能力为 10 10吨 起重能力 : 第一级 : 个单元起重 能力为 2 7 . 每 6 吨 整个 系统 ( 个顶 升单 元 ) 4 起重 能力为 :6"=08 在 7 米高) 274 16 吨( - 3 第二级 : 每个单元起 重能力为 12 , 7 吨 整个系统 ( 个 顶升单元 ) 4 起重能力为 :7 " = 8 吨( 1 米高 ) 12 4 6 8 在 O 第 三级 : 每个单元起重能力为 9 吨 , 6 整个系统( 个顶升单元 ) 4 起 重能力 为:6 4 3 4吨 ( 1 米高 ) 9*=8 在 2 操作速度 : 起重速度 : 上升, 0 1 米/、 , 下降 ~ 0 , 时 连续可调 J 行走速度 : 水平行走 0 3 米, ~ 0 小时, 连续可调 般 l 台液压泵站控制 2 个液压顶升单元( 也有部分产品 1 台液 压泵站控制 4 液压顶升单元 )2台液压泵站从 油路上是各 自独立 个 . 的. 控制上可同时并有相对 关系的控制 . 使其两侧 的 4支液压 顶升单 元同步升降。 液压 系统 中对两侧液压顶升单元的液压缸分别 由 2 比 个 例换向阀单独进行控制 . 可分别 或同时控制两侧液压缸伸缩 . 使每侧 图 1 液压顶升系统 示意图 2 支液压缸靠刚性同步控制 . 两侧液压缸 由液压 比例流量控 制两侧支 腿伸缩同步 。为 了保证安全顶升, 在液压缸无杆腔出油 口设置液控单 液压顶 升单元 : 一般有多节伸缩臂 . 油缸内嵌 。 液压顶升单元常见 向阀 . 使液压缸在顶升重物时保 压。在每侧无杆腔总油路 中设置平衡 结构为二级或三级 液压缸加顶部插拔销结构 伸缩臂一般为低合金高 阀. 使无杆 腔回油时保持有背压 的作用 。液压 系统采用 比例流量 阀控 强度钢板焊接而成 . 常见的伸缩臂截面 为四边形 或八角形 , 臂与臂 之 制. 是在 2 支液压缸 中有 1 支配有位移传感器 . 检测 两侧支腿的位移 间镶有导向作用的滑块. 类似于汽车起重机的 吊臂结构 油缸一般为 信号 . 通过流量一位移一 电反馈的控制方式 . 经比例 流量 阀开启信号 , 多级 ( 二级或三级) 双作用液压缸 . 液压缸通过机械销或耳轴式连接到 形成 1 闭环控制功能 .使两侧液压缸 活塞杆 精确进 出给定 的位移 个 基础和主臂上 . 多节伸缩臂由双作用油缸提供动力进行全部伸展和收 量. 保证两侧支腿 伸缩 同步 , 控制准确敏捷 。 缩。正常工况时垂 直载荷 由液压缸承受 . 伸缩臂仅承受各种因素产生 的侧 向力( 如重物晃动 、 设备行走及停止时产生的惯性力 ) 。臂与臂之 3 应 用 实 例 间常设置凸轮锁结 构或楔形锁紧器系统 .在液压系统完全失效时 . 可 在传统起重机不适合 且不能选择使用永 久性顶部结构起重机 的 以利用机械原理把伸缩臂 锁定在任何位置 . 起到机械保护作用 时候 .液压顶升系统可 以安全高效地吊装 与定位工程 中使 用的重物。 液压泵站 : 由油箱 、 是 阀组 、 泵机组含 液压连接管路 、 力表 及操 压 配合滑移轨道使用 时. 液压顶升系统还 可以移动与放置重物。 作控制阀等组成。 液压泵站 与液压顶升单元通过快速接头连接油管连 某汽车厂冲压 车间安装大型设备时有 两大重件 . 分别为设 备底 座 接, 通过控制 l可 以使 液压顶升单元起升 、 阋 收缩 、 行走及 吊具 的侧 移 : 10 和就位标高+ m的横梁组件约 2 o。 6t 6 4 t厂房 内行车最大起重量 5 t 0, 通过压力表显示的压力数值 . 操作者可 以监视负载分配情况 以及是否 无法利用行车 吊装 .而利用 2台起重机配合吊装方法涉及费用高 、 安 超载等。 装速度慢 、 吊装配合等问题 。 因此利用液压顶升系统的方法最优 , 通过 导轨 : 可根据实 际需要制作任意 长度的滑移导轨 . 轨上一般焊 导
塔吊顶升步骤及注意事项
塔吊顶升步骤及注意事项塔吊是建筑工地中常见的大型起重设备,为了满足施工高度的不断增加,需要对塔吊进行顶升作业。
塔吊顶升是一项较为复杂且危险的工作,需要严格按照规定的步骤进行操作,并注意相关的安全事项。
以下是塔吊顶升的具体步骤及注意事项。
一、塔吊顶升前的准备工作1、检查塔吊的结构和各部件的状态在进行顶升前,需要对塔吊的塔身、起重臂、平衡臂、塔帽、顶升套架等结构部件进行仔细检查,确保没有裂缝、变形、锈蚀等问题。
同时,检查各连接部位的销轴、螺栓是否紧固,各运动部件是否灵活,如起重臂的变幅机构、起升机构等。
2、清理施工现场清理塔吊周围的障碍物,确保顶升作业有足够的空间。
同时,设置警戒区域,禁止无关人员进入。
3、准备顶升所需的工具和设备包括顶升专用的液压泵站、油缸、顶升横梁、标准节等,并确保这些工具和设备的完好和可靠性。
4、确定塔吊的平衡状态通过吊起一定重量的重物,调整起重臂的角度,使塔吊达到平衡状态。
在顶升过程中,塔吊的平衡状态至关重要,否则可能会导致塔身倾斜甚至倒塌。
二、塔吊顶升的具体步骤1、吊起一个标准节将起重臂旋转至标准节的引入方向,使用吊钩吊起一个标准节,放在引进平台上。
2、拆除塔身与下支座的连接螺栓使用扳手等工具,拆除塔身与下支座之间的连接螺栓,但要保留其中的对角两个螺栓,以防止塔身突然下滑。
3、启动顶升液压系统操作液压泵站,使顶升油缸伸出,将顶升横梁两端的销轴插入塔身的顶升踏步孔内。
4、顶升塔身继续操作液压泵站,使顶升油缸缓慢顶升,将塔身顶起一定高度,直到能够引入一个标准节的空间。
5、引入标准节将放在引进平台上的标准节推至塔身正上方,对准塔身的连接孔,然后缓慢缩回顶升油缸,使标准节与塔身连接牢固。
6、紧固连接螺栓使用扳手将新引入的标准节与塔身之间的连接螺栓紧固,确保连接可靠。
7、重复上述步骤按照上述步骤,依次顶升并引入标准节,直到达到所需的高度。
8、安装附着装置当塔吊达到一定高度时,需要安装附着装置,将塔身与建筑物或其他固定结构连接起来,以增加塔吊的稳定性。
节流孔板在船舶舱盖顶升系统中的应用

第12期2023年4月江苏科技信息JiangsuScienceandTechnologyInformationNo 12Aprilꎬ2023作者简介:李锋(1985 )ꎬ男ꎬ河南南阳人ꎬ工程师ꎬ学士ꎻ研究方向:船舶与海洋工程ꎮ节流孔板在船舶舱盖顶升系统中的应用李㊀锋ꎬ吴光明(中远海运川崎船舶工程有限公司技术本部ꎬ江苏南通226005)摘要:顶升侧移式舱盖结构简单ꎬ操作便利ꎬ广泛应用于各型散货船ꎬ但散货船复杂恶劣的工作环境经常会对舱盖运行造成损坏ꎮ文章对某型20 8万吨散货船舱盖顶升时卡死ꎬ导致舱盖无法打开的原因进行了分析ꎬ根据故障原因提出在液压顶升回路中设置节流孔板的方案ꎬ利用其节流调速原理增加油缸顶升的同步性ꎮ阐述了节流孔板的型式选择及孔径的计算方法ꎬ解决了舱盖顶升系统不同步导致舱盖卡死ꎬ无法打开的问题ꎬ增强了舱盖使用的可靠性ꎮ关键词:散货船ꎻ舱盖ꎻ顶升系统ꎻ节流孔板中图分类号:U664 5㊀㊀文献标志码:A0㊀引言㊀㊀20 8万吨散货船是南通中远海运川崎船舶工程有限公司开发的一款Newcastlemax型货船ꎮ该轮为单机单浆船ꎬ直船艏㊁方艉㊁居住舱室㊁驾驶室及机舱位于尾部[1]ꎮ全船设有9个货仓ꎬ适于装载矿砂㊁谷物等散货ꎮ舱口盖为电动液压顶升侧移式ꎮ20 8万吨散货船总布置图ꎬ如图1所示ꎮ图1㊀20 8万吨散货船总布置㊀㊀舱口盖是现代船舶的重要设备ꎬ它的主要作用是封闭货舱口ꎬ保护货舱内的货物不受风浪的侵蚀ꎬ同时ꎬ打开舱口盖时ꎬ可以对货物进行装卸作业ꎮ舱口盖质量的好坏ꎬ影响着船舶的使用寿命㊁货物的安全ꎮ本轮采用的是双边侧移式风雨密舱口盖ꎬ每个舱盖包括两片盖板ꎬ在船体中心线处形成纵向接缝ꎮ每片盖板有4个滚轮ꎬ可以在舱口围上表面的导轨上行走ꎮ舱盖开启时ꎬ先由8个顶升油缸将舱盖抬升135mm至滚轮轨道面ꎬ使舱盖的密封条和舱口围的不锈钢压条脱离ꎬ再依靠每舱左舷的液压马达ꎬ通过循环链条系统ꎬ将盖板开启并收藏到相应的舷侧ꎮ舱盖典型布置及开合位置ꎬ如图2所示ꎮ图2㊀舱盖典型布置及开合位置1 故障分析及处理㊀㊀该轮交付后ꎬ主要运营中国西非航线ꎬ从事铝土矿的运输ꎮ从船东反馈中得知ꎬ在几内亚港装卸货时ꎬ多次出现顶升油缸工作不同步ꎬ舱盖中间的油缸顶升较慢ꎬ舱盖两侧的油缸顶升较快ꎬ舱盖开启不顺畅ꎮ特别是2号货舱和6号货舱的表现更为明显ꎬ两侧的顶升油缸已升至顶端ꎬ中间的顶升油缸仍未动作ꎬ导致舱盖在中间限位处卡死ꎬ不能打开ꎮ同时ꎬ卡死造成舱盖中间限位㊁中缝边缘㊁舱盖四角下缘等处的油漆破损ꎮ作为应急方法ꎬ船员现场采取分步顶升ꎬ先顶起ꎬ落下一半ꎬ再顶起ꎬ再落下一点ꎬ再顶起ꎬ用淡水冲洗舱盖降温ꎬ避免中午开舱等手段ꎬ最终打开了舱盖ꎮ但隐患仍然存在ꎬ船东担心会对舱盖造成进一步的损害ꎬ例如舱盖整体变形㊁局部结构损伤㊁西澳装铁矿产生 怠时 ㊁液压管爆裂等ꎮ因此ꎬ需要从设计根源上解决问题ꎮ舱盖顶升油缸布置及液压系统ꎬ如图3所示ꎮ图3㊀舱盖顶升油缸布置及液压系统㊀㊀调查发现ꎬ舱盖在船宽方向上结构不对称ꎬ由于中间接缝处盖板只有前后两端支撑ꎬ悬空跨度大ꎬ而两侧盖板可以通过前后两端和侧面支撑ꎬ因此舱盖盖板呈明显的梯形走向ꎬ中间高ꎬ两侧矮ꎬ从而导致两侧质量小ꎬ中间质量大ꎮ同时2舱位于船首ꎬ需承受甲板上浪的作用力ꎬ6舱作为风暴压载舱ꎬ需承受内部压载水冲击ꎬ舱盖结构都进行了大幅加强ꎮ因此2/6舱也是全船最重的舱盖ꎬ造成2/6舱顶升不同步现象更为严重ꎮ计测发现ꎬ当舱盖泵单元启动后ꎬ管路中的高压油压力由0开始升高ꎮ当压力达到11 9MPa时ꎬ舱盖两侧顶升油缸即开始顶升ꎬ中间的油缸未动ꎮ当压力继续上升到11 9~14 4MPa时ꎬ两侧的油缸加速上升ꎬ而中间的油缸仍然不动ꎮ当管路压力大于14 4MPa时ꎬ中间的油缸才开始动作ꎮ通过分析可知ꎬ在整个上升过程中ꎬ两侧油缸受到的负载小于中间的油缸ꎬ而油缸的顶升推力相同ꎬ两侧油缸的顶升加速度始终大于中间的油缸ꎬ不同步的现象会越来越严重ꎮ由于两侧顶升油缸先启动而中间顶升油缸后启动ꎬ会造成整个舱盖朝船舯舱盖接缝处扭转ꎬ加上热带港口天气炎热造成的舱盖变形ꎬ极端情况下扭转会造成舱盖与中间限位卡死ꎬ出现两侧油缸顶升到位而中间油缸顶不起来的情况ꎮ舱盖在中间限位处扭转示意图ꎬ如图4所示ꎮ图4㊀舱盖在中间限位处扭转示意㊀㊀鉴于液压油总是向阻力最小的方向运动这一特性ꎬ从泵单元和顶升油缸方面改进并无太大效果ꎬ而且会显著增加成本ꎬ因此计划引入速度控制回路ꎮ对于液压油缸回路来说ꎬ假设输入液压油缸的流量为qꎬ液压缸的有效面积为Aꎬ则液压缸的运动速度为:v=qA(1)因此ꎬ改变输入液压油缸的流量ꎬ可以达到改变速度的目的ꎮ具体方法有节流调速㊁容积调速㊁容积节流调速3种ꎮ节流调速是采用定量泵供油ꎬ由流量阀改变进入执行元件的流量以实现调速ꎻ容积调速是采用变量泵或变量马达实现调速ꎻ而容积节流调速则采用变量泵和流量阀联合调速ꎮ比较可知ꎬ在定量液压泵供油的液压系统中安装流量阀ꎬ调节进入液压缸的油液流量ꎬ是结构最简单的回路ꎬ成本低ꎬ使用维修方便ꎬ十分适合舱盖液压系统使用ꎮ根据流量阀在油路中安装位置的不同ꎬ又分为进油路节流调速㊁回油路节流调速㊁旁通油路节流调速等形式ꎮ结合舱盖液压系统的特点ꎬ选择了进油路节流调速回路[2]ꎮ图5为舱盖千斤顶进油路节流调速回路ꎮ图5㊀舱盖千斤顶进油路节流调速回路㊀㊀进油路节流调速回路工作时ꎬ液压泵输出的油液ꎬ经节流阀进入顶升油缸ꎬ推动油缸向上运动ꎮ多余的流量通过溢流阀流走ꎮ对舱盖顶升系统来说ꎬ每个油缸增设节流阀后ꎬ由于节流阀的阻尼作用ꎬ流过节流阀的流量远小于泵单元提供的流量ꎬ顶升工作开始后系统压力很快达到溢流阀的调定压力(Pb=22 5MPa)ꎬ进入液压缸油液的流量q1和q2由节流阀调节ꎬ多余的油液q3经溢流阀流回油箱ꎮ液压缸左腔的油液压力P1和P2由作用在油缸活塞上负载阻力F1和F2的大小既舱盖盖板的重量决定ꎮA为油缸活塞的有效作用面积ꎬ则:P1=F1A(2)P2=F2A(3)因此ꎬ可以通过调节每个流量阀的开度ꎬ使负载大的中间油缸腔内压力P2达到F2/Aꎬ两侧油缸腔内压力P1达到F1/Aꎬ从而使所有油缸同时启动ꎬ舱盖同步提升ꎮ2㊀节流孔板设计方案㊀㊀考虑到舱盖顶升系统工况单一ꎬ节流阀无需可调功能ꎬ因此选择成本较低的节流孔板设计ꎮ其节流原理是通过节流口过流断面面积的变化达到改变压力的目的ꎬ通常有薄壁小孔和细长小孔ꎬ实际应用中ꎬ薄壁小孔常用于节流ꎬ而细长孔常用于阻尼孔ꎬ因此选择薄壁小孔形式[3]ꎮ液体通过薄壁小孔示意图ꎬ如图6所示ꎮ节流形式确定后ꎬ需根据压力㊁流量设计节流孔径ꎮ根据流体力学伯努利方程ꎬ可准确计算出节流孔直径:注:p1ꎬp2为小孔前后的压力ꎻd为孔径ꎻl为孔长ꎻdc为收缩截面处直径ꎮ图6㊀液体通过薄壁小孔Q=CqA02Δpρ(4)A0=QCq2Δpρ(5)式中:Q为所需流量ꎬQ=0 000362m3/sꎻCq为薄壁小孔流量系数ꎬCq=0 6ꎻΔp为孔板压差:Δp1=10 6MPa(两侧油缸)ꎬΔp2=8 1MPa(中间油缸)ꎻρ为液压油密度ꎬρ=876kg/m3ꎻA0为节流孔板节流口通流截面积ꎮ经计算ꎬA0=3 878mm2(两侧油缸)ꎬA0=4 437mm2(中间油缸)ꎮ则节流孔直径为2 2(两侧油缸)㊁2 4mm(中间油缸)ꎮ3㊀加工及安装方案㊀㊀由于节流孔板孔径较小ꎬ且散货船上工作环境恶劣ꎬ可能造成节流孔堵塞的情况ꎮ因此决定采用不锈钢材质ꎬ同时考虑到后续拆装清洗维护方便ꎬ将节流孔板安装在顶升油缸进油口内ꎬ顶升油缸进油口节流孔板如图7所示ꎮ㊀㊀根据顶升油缸进油口结构形式ꎬ确定节流孔板外直径为36mmꎬ厚度为12mmꎬ这样可以保证增加节流孔板后ꎬ不影响原液压软管的连接及密封性ꎮ加工完成的节流孔板如图8所示ꎮ全船共计9个舱ꎬ每舱8个顶升油缸ꎬ因此共需72个节流孔板ꎮ将加工完成的节流孔板送到船上后ꎬ在船员协助下ꎬ将舱盖移动到关闭位置ꎮ此时顶升油缸位于行程底部ꎬ顶升油缸内无多余液压油ꎮ关闭液压管路进出口阀门ꎬ将液压软管拆下ꎬ然后将节流孔板放入顶升油缸进油口处ꎬ随后将液压软管复位ꎬ完成改造安装ꎮ图7㊀顶升油缸进油口节流孔板图8㊀节流孔板4㊀使用效果㊀㊀舱盖顶升系统增加节流孔板后ꎬ使用效果如下: (1)安装完成后ꎬ立刻进行了开关舱试验ꎬ顶升油缸同步性明显提升ꎮ(2)跟踪多个航次后ꎬ船东确认在各个港口装卸货ꎬ没有再发生舱盖卡死无法开启的现象ꎮ(3)避免了舱盖顶升不同步卡死造成的舱盖中间限位㊁中缝边缘㊁舱盖四角下缘等处的油漆破损ꎮ(4)同时ꎬ避免了可能的进一步损害ꎬ如舱盖整体变形㊁局部结构损伤㊁西澳装铁矿产生 怠时 ㊁液压管爆裂等ꎮ㊀㊀实践证明ꎬ增加节流孔板的思路和孔径计算的方法是准确有效的ꎮ5㊀结语㊀㊀在试验船成功实践后ꎬ已将节流孔板在舱盖顶升系统中的应用作为标准设计推广ꎮ在船舶舱盖顶升系统中应用节流孔板ꎬ加工安装方便ꎬ成本不高ꎬ但顺利解决了顶升油缸工作不同步的问题ꎬ避免了舱盖与限位卡死导致无法开启ꎬ减少了船员操作难题和维护工作ꎬ增加了船东满意度ꎬ是一次成功的改进ꎮ船舶舾装设计种类繁杂ꎬ经常会遇到各种问题ꎬ需要设计人员开拓思路ꎬ不断改进ꎬ促进舾装设计的不断发展ꎮ参考文献[1]李锋ꎬ周学军.20 9万吨散货船主要外舾装设计[J].江苏科技信息ꎬ2015(3):58-60.[2]中国船舶工业集团公司ꎬ中国船舶重工集团公司ꎬ中国造船工程学会.船舶设计实用手册-舾装分册[M].3版.北京:国防工业出版社ꎬ2013.[3]赵国华ꎬ杨燕飞.高压水节流孔板设计改进[J].昆钢科技ꎬ2005(2):14-16.(编辑㊀姚鑫)ApplicationofthrottleorificeplateinshiphatchjackingsystemLiFeng WuGuangmingTechnicalDivisionofNACKS Nantong226005 ChinaAbstract Jackingsidemovinghatchcoversarewidelyusedinvarioustypesofbulkcarriersduetotheirsimplestructureandconvenientoperation.However thecomplexandharshworkingenvironmentofbulkcarriersoftencausesdamagetotheoperationofhatchcovers.Thisarticleanalyzesthecauseofthehatchcoverofa208000tbulkcargoshipstickingduringjacking resultinginthehatchcoverbeingunabletobeopened.Basedonthecauseofthefailure aschemeofinstallingathrottleorificeinthehydraulicjackingcircuitisproposed usingitsthrottlespeedregulationprincipletoincreasethesynchronizationofthecylinderjacking.Thetypeselectionandcalculationmethodoforificediameteraredescribed.Theproblemofthehatchcoverbeingstuckandunabletobeopenedduetotheunsynchronizationofthehatchcoverliftingsystemhasbeensolved enhancingthereliabilityofthehatchcoverinuse.Keywords bulkcarrier hatchcover jackupsystem throttleorifice。
塔式起重机液压顶升系统故障分析及检测

塔式起重机液压顶升系统故障分析及检测摘要:工程建设期间,通常都使用到塔式起重机,但在使用过程中,塔式起重机液压顶升系统容易出现故障,影响设备正常使用。
如果处理不当,容易造成机毁人伤(亡)等事故发生。
因此,应引起我们高度重视。
本文对引起设备故障原因进行分析,并提出了故障处理方法和检测方法,供同行参考。
关键词:液压顶升系统;故障;检测;塔式起重机;引言目前许多工程建筑施工都使用塔式起重机,它对提升施工进度和效率,降低企业经营成本有着重要意义。
但是使用过程当中,液压顶升系统容易出现问题,例如顶升速度、顶起后自动溜缸或根本顶不动等,这些都会对施工进度造成影响,如果不及时进行处理,会导致倒塔事故发生,影响操作人员人身安全,因此,必须做好对液压顶升系统的故障进行检测工作,及时排除质量隐患,确保系统正常。
1 塔式起重机顶升系统的工作原理塔式起重机顶升系统主要作用是,顶起系统上面的结构,并保证工作时系统升降速度平衡。
因此,顶升系统必须具有相应的安全性,保证系统工作时升降平稳,转向时受到冲击力小,满足最大起重量。
塔式起重机液压顶升系统工作原理如图 1 所示。
(图1顶升液压系统原理图)2 塔式起重机液压顶升系统故障原因的分析2.1 油缸油缸产生故障主要出现在其密封件存在破损和底部单向阀不能很好封闭,导致油缸产生溜缸问题。
通常检验油缸问题的方法有两种:2.1.1 活塞密封件的检验油缸存在活塞密封问题主要来自有杆腔端与无杆腔端,通常检验活塞杆可以查明问题原因。
具体操作步骤如下:先从油缸内伸出活塞杆,再将油缸旁的低压油管打开,并继续伸出活塞杆。
之后观察油管,若油缸中的油可以流出,则可以认定是油缸活塞的无杆腔端密封件存在问题;若油缸中有杆腔供油的情况下,活塞杆能够自动伸出,则表明油缸的有杆腔端的密封件出现了问题。
2.1.2 液控单向阀故障的检验具体检验步骤如下,一般先切断系统电源,后把高压腔开关打开,之后认真观察,如果发现压力油从油管流出,则可以认定液控单向阀存在问题,要及时对其进行处理,确保系统安全运行。
顶升移栽机构成-概述说明以及解释

顶升移栽机构成-概述说明以及解释1.引言1.1 概述顶升移栽机构是一种用于将重物如机器设备或构件从一个位置移动到另一个位置的机械装置。
它的主要功能是通过利用液压或机械力量进行顶升和平移操作,以实现货物在不同位置之间的快速、安全和高效转移。
顶升移栽机构由多个组成部分组成,包括顶升装置、移动装置、控制系统等。
其中,顶升装置是实现物体的垂直运动的关键部分,通常采用液压缸或螺杆传动等机制。
移动装置则负责将顶升的物体水平运动到目标位置,常见的有轮子或履带等结构。
控制系统则是整个机构的智能化核心,用于对顶升和移动进行精确控制和监测。
顶升移栽机构在现代工业生产中起着至关重要的作用。
它能够解决重物在生产过程中的搬运和布局问题,提高了生产效率和工作安全性。
同时,由于顶升移栽机构具有灵活性和可调性,可以根据实际需求进行设计和定制,适用于各种场景和环境。
这种机构的应用领域广泛,包括制造业、仓储物流、航空航天等领域。
随着科技的不断发展,顶升移栽机构也面临着新的机遇和挑战。
未来的发展趋势将更加注重机器智能化、自动化和人机协作。
随着人工智能、机器视觉和传感器技术等的快速进展,顶升移栽机构有望实现更高程度的自主操作和精确控制。
预计在未来几年内,顶升移栽机构将成为工业生产的重要装备之一,并在各个领域发挥更大的作用。
文章结构部分的内容应该是对整篇文章的框架和组织进行介绍。
下面是一个可能的参考内容:1.2 文章结构本文将按照以下结构来呈现顶升移栽机构的组成及其重要性:第一部分是引言。
引言部分将概述顶升移栽机构的背景和概念,介绍本文的目的和意义。
通过引言,读者将能够对顶升移栽机构有一个整体的了解。
第二部分是正文。
正文将详细介绍顶升移栽机构的定义和主要组成部分。
在2.1节中,我们将对顶升移栽机构进行定义,包括其基本原理和功能。
在2.2节中,我们将详细介绍顶升移栽机构的主要组成部分,例如顶升装置、移栽装置等。
通过对每个组成部分的介绍,读者将对顶升移栽机构的工作原理和结构有更深入的理解。
自升塔式起重机液压顶升系统故障分析

建模与仿真[J].高技术通讯,2017,27(Suppl 1):
816-822. [4]钟云刚.海沃自卸液压举升系统常见故障分析及排除方
法[J].农家参谋,2017,22(12):297-298. [5]罗智宁,许伟,黄雪梅,等.自卸汽车液压举升系统隐
形缺陷和潜在失效模式分析[J].自动化与仪器仪表, 2017,16(4):192-195.
2021 年 第 12 期 文章编号:2095-6835(2021)12-0029-02
Science and Technology & Innovation┃科技与创新
自升塔式起重机液压顶升系统故障分析
骆兵华
(三明久安安全技术服务有限公司,福建 三明 365500)
摘 要:主要介绍了自升塔式起重机液压顶升系统的工作原理,分析了故障原因,采用科学合理的解决措施,消
福建电脑,2016,32(11):22-23.
[5]樊荣.二维码技术在可交互教材中的应用研究[D].济 [8]王鑫.基于 BYOD 及二维码的实验室信息共享平台建设与
南:山东师范大学,2015.
研究[J].中国教育技术装备,2016(24):45-46,51.
[6]张春平,段静雨,么焕开,等.二维码技术在药用植物 ————————
顶模体系中多缸同步顶升液压控制系统设计
2021年6月第49卷第11期机床与液压MACHINETOOL&HYDRAULICSJun 2021Vol 49No 11DOI:10.3969/j issn 1001-3881 2021 11 014本文引用格式:魏列江,顾青青,辛钰林,等.顶模体系中多缸同步顶升液压控制系统设计[J].机床与液压,2021,49(11):65-69.WEILiejiang,GUQingqing,XINYulin,etal.Designonhydrauliccontrolsystemformulti⁃cylindersynchronousliftingofjack⁃upformworksystem[J].MachineTool&Hydraulics,2021,49(11):65-69.收稿日期:2020-03-05基金项目:国家自然科学基金地区科学基金项目(51765033)作者简介:魏列江(1972 ),男,博士,教授,主要研究方向为测控技术与应用㊁电液控制㊂E-mail:weiliejiang@126 com㊂通信作者:顾青青(1995 ),女,硕士研究生,研究方向为液压系统设计及电液控制㊂E-mail:1536946214@qq com㊂顶模体系中多缸同步顶升液压控制系统设计魏列江1,顾青青1,辛钰林2,卢利锋1(1 兰州理工大学能源与动力工程学院,甘肃兰州730050;2 甘肃省第七建设集团股份有限公司,甘肃兰州730030)摘要:针对超高层建筑施工中液压顶升钢平台的负载不均衡导致的多缸同步运动精度低的问题,设计一种以工业控制计算机为上位机㊁西门子PLC为下位机的液压同步控制系统㊂运用高精度的位移传感器和倾角传感器对系统的关键参数进行检测和反馈㊂基于经典的PID控制算法,对对称比例阀的阀口开度进行精确控制,进而控制进入各缸的流量,达到多个液压缸同步顶升的要求㊂建立单个阀控非对称液压缸的数学模型,并进行稳定性分析及系统特性分析㊂结果表明:使用PID控制算法,顶模液压系统响应速度较快,运行稳定且无超调,能满足液压缸同步要求㊂关键词:顶模体系;比例阀;多缸同步控制;PID控制中图分类号:TH137DesignonHydraulicControlSystemforMulti⁃cylinderSynchronousLiftingofJack⁃upFormworkSystemWEILiejiang1,GUQingqing1,XINYulin2,LULifeng1(1 SchoolofEnergyandPowerEngineering,LanzhouUniversityofTechnology,LanzhouGansu730050,China;2 TheNo 7ConstructionGroupShareLimitedCompanyofGansuProvince,LanzhouGansu730030,China)Abstract:Aimingattheproblemoflow⁃precisionofmulti⁃cylindersynchronousmovementcausedbyunbalancedloadofhydrau⁃licjackingsteelplatforminsuperhigh⁃risebuildingconstruction,ahydraulicsynchronouscontrolsystemwasdesignedwithindustrialcontrolcomputerastheuppercomputerandSiemensPLCasthelowercomputer.Thekeyparametersofthesystemweretestedandfedbackbyusinghigh⁃precisiondisplacementsensorandinclinationsensor.BasedontheclassicalPIDcontrolalgorithm,thevalveportopeningofthesymmetricalproportionalvalvewaspreciselycontrolledtoregulatetheflowintoeachcylinder,andthentomeetthere⁃quirementsofsynchronousjackingofmulti⁃hydrauliccylinders.Themathematicalmodelofasinglevalvecontrolledasymmetrichydrau⁃liccylinderwasestablished,andthestabilityandsystemcharacteristicswereanalyzed.TheresultsshowthatbyusingthePIDcontrolalgorithm,thejack⁃upformworksystemhasfastresponsespeed,stableoperationwithoutovershootandcanmeetthesynchronizationrequirementsofhydrauliccylinders.Keywords:Jack⁃upformworksystem;Proportionalvalve;Multi⁃cylindersynchronouscontrol;PIDcontrol0㊀前言随着现代建筑业的快速发展,超高层建筑层出不穷㊂由于超高层建筑高度高㊁跨度大㊁施工较困难,传统的脚手架施工方式对于超高层建筑存在较为严重的安全隐患㊂超高层建筑的发展不仅使整个建筑行业得到快速发展,同时也带动了更先进的施工技术的发展,目前国内外高层建筑施工普遍采取一种全封闭钢平台结构体系[1-6]㊂钢平台需要具有自主爬升的能力,依据国内外现有经验,爬升所需的动力源采用液压系统是当前最有效的方法㊂液压系统现已广泛应用于工业㊁建筑业等行业,由于其功率密度大㊁承载能力强,在重工领域有着无可替代的优势㊂液压传动通过动力元件产生高压油,经过控制元件和管道将高压油输送到液压缸等执行机构,再通过油缸将压力能转化为机械能,驱动设备完成预定工作㊂这不仅可以获得平稳的传动效果,而且容易实现液压系统的无级调速[7-13]㊂本文作者采用液压动力传动方式来完成钢平台的整体顶升㊂顶模液压系统采用4个液压缸作为顶升缸来支撑和顶升整个钢平台,由于液压顶升钢平台负载和自身质量较大㊁负载不平衡㊁施工环境恶劣多变等因素,导致平台水平度的调节难度较大㊂针对在偏载下四缸不同步问题,以钢平台为研究对象,设计四缸同步液压系统和控制系统,以PLC为控制器,结合PID算法,实现四缸同步顶升㊂建立阀控缸的数学模型并进行仿真分析,得到不同参数作用下的阶跃响应,验证系统的可行性和稳定性㊂1 液压顶升系统设计液压顶升系统分为液压驱动系统和液压阀控缸系统两部分㊂驱动系统采用恒压变量泵来为整个系统提供动力源;阀控缸系统由液压阀组㊁液压缸及控制系统组成㊂1 1㊀液压系统中控制元件的选型对于顶升系统来说,控制元件的选择直接决定了顶升系统的同步精度和响应性能㊂适用于同步顶升系统的控制元件大致可以分为以下3种:开关阀㊁比例阀和伺服阀,其性能参数如表1所示㊂表1㊀同步顶升系统控制元件特性元件类型驱动装置结构死区响应频率/Hz经济性抗污染能力开关阀通断电磁铁简单40较低较强比例阀比例电磁铁简单有中位死区80一般强伺服阀力马达或力矩马达复杂无中位死区200较昂贵弱㊀㊀由表1可知比例阀是介于开关阀与伺服阀之间的一种液压阀,它可以根据输入的电信号连续㊁成比例地控制油液的压力㊁流量等参数㊂由于比例阀用于工地这种恶劣工况场所,这就要求其具有较强的抗污染能力;在顶模平台中,为保证油缸动作的调节效果,将阀安装在液压缸附近,但是一旦平台开始使用,无法轻易接近阀,这就要求阀有更好的控制性能和高自动化程度㊂因此,此系统采用比例阀作为控制元件来控制液压缸的同步升降㊂如图1所示,顶模系统采用压力补偿器+比例阀的结构,并加入平衡阀和防爆阀来平衡超越负载和保证平台安全性㊂此系统选用力士乐4WREE系列10通径的比例阀,阀内置放大器㊂由于单缸负载5MN,目前市场上没有符合要求的标准缸,所以需要定制㊂位移传感器选择拉线式传感器BK⁃W2⁃8,量程为0 6m㊂图1㊀单缸系统原理1 2㊀PLC同步控制系统设计钢平台系统主要由液压泵站㊁液压缸组㊁PLC控制系统㊁监测系统㊁工控机和操作台组成,如图2所示㊂图2㊀PLC同步控制系统组成框图PLC是整个控制系统的核心,系统工作时通过操作开关㊁按钮等发出控制信号并分析监测系统发出的检测信号,通过PLC控制泵站和控制阀组驱动执行油缸,以实现控制操作[14]㊂监测系统采用IPC集中控制和监测,选用位移㊁应力㊁压力㊁倾角和温度等多种传感器和仪器,实现被测量数字显示㊁模拟显示㊁波形记录和远距离传输㊂此系统采用西门子S7⁃300PLC,它具有很高的电磁兼容性和抗振动㊁抗冲击能力,可用于恶劣的工程环境[15]㊂液压控制属于流体控制,具有外在干扰大和非线性等特点㊂为了实现多缸的同步控制,需要采用合适的控制方式㊂开环控制的液压系统在没有信号反馈的情况下驱动执行元件时,系统的精度由液压控制元件的控制精度来保证,故阀的精度直接影响系统的精度㊂在液压同步系统中,开环控制通常用于对同步控制不作严格要求的场合㊂闭环控制液压系统具有信号检测元件,可以提供信号反馈㊂与开环控制系统相比㊃66㊃机床与液压第49卷较,闭环控制具有较高的精度㊂为保证钢平台稳定性和安全性,此系统采用闭环控制方式[16]㊂在液压闭环同步控制中,常用的控制方式有 同等方式 和 主从方式 ㊂ 同等方式 是指所有执行元件不分主次,同时跟随期望输出值分别受到控制,从而实现同步驱动的目的[17]; 主从方式 是指所有执行元件中,以其中的一个元件输出为期望输出值,其余的执行元件均受到控制以跟踪这一选定的理想输出,从而实现同步驱动的目的㊂由于此系统中液压缸顶升速度为5m/h,速度较慢,而比例阀的响应性能较好,故选择 同等方式 来实现四缸同步㊂2㊀控制策略液压同步系统具有时变性㊁非线性和大迟滞等特点,其控制算法应遵循简单有效㊁实时性强的原则[18]㊂同步系统中常用的控制算法有加减控制㊁PID控制㊁模糊PID控制㊁神经网络控制等㊂加减控制算法简单㊁实时性强,主要适用于同步精度不高且速度低的场合;PID是目前工程领域使用最广泛的控制算法,适用于高精度控制系统,其原理简单㊁使用方便㊁适应性强㊁鲁棒性强,对被控对象的变化不太敏感,非常适用于环境恶劣的工业生产现场[18];模糊PID与神经网络控制相对前2种控制算法具有更高的控制精度和控制品质,但算法及过程过于复杂,不适用于建筑施工领域㊂本文作者所设计的系统采用PID控制策略以满足四缸同步顶升的工作要求,并保证整个工作过程的稳定可靠㊂同步控制原理如图3所示㊂图3㊀同步控制原理框图3㊀数学模型建立与Simulink仿真3 1㊀液压系统建模在顶模液压系统建模中,液压缸的负载对象为20MN的平台,弹性负载很小可以忽略不计㊂液压缸被视为一个积分环节与二阶环节的组合,其传递函数为G1(s)=1/Ahs1ω2hs2+2ζhωhs+1æèçöø÷(1)其中:Ah为液压缸无杆腔面积,Ah=0 3316m2;ωh为系统固有频率,ωh=Khmt=4EA2mtVt,Hz;ζh为系统阻尼比,ζh=KceAβeMVt㊂比例阀一般被视为二阶振荡环节,其传递函数为G2(s)=kq1ω2vs2+2ζvωvs+1(2)其中:kq为比例阀流量增益;ωv为比例阀的固有频率,Hz;ζv为比例阀的阻尼比㊂系统的传递函数为G(s)=kcs1ω2hs2+2ζhωhs+1æèçöø÷1ω2vs2+2ζvωvs+1æèçöø÷(3)kc=kqkfkpAh(4)其中:kf为位移传感器的增益;kp为PID的比例系数;kc为系统的开环放大增益㊂根据元件选型可知各参数值如表2所示㊂表2㊀元件参数参数参数值参数参数值kq0.15ˑ10-3ζh0.2kf1.25ωv/Hz377kp100ζv0.7ωh/Hz188.4㊀㊀综上所述,得到系统的开环传递函数:G(s)=0 05655s1188 42s2+0 4188 4s+1æèçöø÷13772s2+1 4377s+1æèçöø÷(5)根据闭环控制系统原理框图和各环节传递函数,在Simulink窗口中选取对应模块建立单个阀控缸仿真模型,如图4所示㊂图4㊀单个阀控缸Simulink仿真模型㊃76㊃第11期魏列江等:顶模体系中多缸同步顶升液压控制系统设计㊀㊀㊀3 2㊀稳定性分析与仿真结果任何系统在扰动作用下都会偏离原平衡状态,产生初始偏差㊂稳定性是指系统在扰动消失后,由偏差状态恢复到原平衡状态的性能㊂对于位置控制系统,稳定性至关重要㊂因此,利用MATLAB/Simulink进行线性分析,得到系统Bode图,如图5所示㊂可以看出:当幅频特性曲线穿越0dB线时,对应的相频曲线位于-180ʎ线上方,系统相位裕度为178ʎ;当相频特性曲线穿越-180ʎ线时,对应的幅频特性位于0dB线以下,系统幅值裕度为51dB,较大的相位裕度对应较小的超调量,满足系统无超调要求,因此该控制系统是稳定的㊂图5㊀系统Bode图影响液压控制系统稳定性和快速性的主要参数是开环增益kc㊁液压缸固有频率ωh和阻尼比ζh㊂kc的值越大系统精度越高,液压缸有效面积Ah和比例阀流量增益是所选元件决定的,因此不能调整,位移传感器增益Kf调整范围有限,因此只有改变PID比例系数Kp的值来判断参数变化对系统特性的影响㊂由图6㊀液压系统阶跃响应曲线于同步控制系统不允许有超调量,则响应时间会较长㊂调节PID比例系数Kp,直至系统无振荡,达到临界稳定状态[19]㊂当Kp分别取100㊁150㊁200时,系统的阶跃响应如图6所示,可知:随着Kp的增大,系统的动态响应有明显的改善,响应时间也有所缩短㊂4㊀结束语本文作者采用PLC控制技术完成对液压顶升钢平台的同步控制㊂对单个阀控缸系统建立数学模型并进行仿真分析,获得了在不同参数下的阶跃响应,可知:使用PID控制算法时,系统响应速度较快,运行稳定且无超调㊂在闭环控制的基础上,采用同步方式及PID算法可以满足顶模系统在大跨距㊁重载㊁偏载下四缸的同步要求㊂参考文献:[1]余祖耀,陈壮.基于S7-300的比例阀控液压缸的PID静态补偿控制[J].机械与电子,2016,34(4):43-46.YUZY,CHENZ.PIDstaticcompensationcontrolstrategyofhydrauliccylindercontrolledbyproportionalvalvebasedonS7-300[J].Machinery&Electronics,2016,34(4):43-46.[2]BEJARBANEHEY,BAGHERIA,BEJARBANEHBY,etal.AnewadjustingtechniqueforPIDtypefuzzylogiccon⁃trollerusingPSOSCALFoptimizationalgorithm[J].AppliedSoftComputing,2019,85:105822.[3]RAZAA,ANWARMN.DirectsynthesisbasedPIDcon⁃trollerdesignfortime⁃delayedunstableprocessesinparallelcontrolstructure[J].JournalofControl,AutomationandElectricalSystems,2019,30(6):879-891.[4]任俊杰,李永霞,李媛,等.基于PLC的闭环控制系统PID控制器的实现[J].制造业自动化,2009,31(4):20-23.RENJJ,LIYX,LIY,etal.TherealizationofPIDcontrol⁃lerinclosed⁃loopcontrolsystembasedonPLC[J].Manu⁃facturingAutomation,2009,31(4):20-23.[5]何谦,刘忠.高速开关阀的液压同步系统设计[J].制造技术与机床,2009(1):142-143.HEQ,LIUZ.Designofthehydraulicsynchronizationcon⁃trolsystembasedonhigh⁃speedon⁃offvalve[J].Manufac⁃turingTechnology&MachineTool,2009(1):142-143.[6]张志伟,张福波,王国栋.一种双液压缸同步控制方法及其仿真研究[J].机床与液压,2003,31(3):232-239.ZHANGZW,ZHANGFB,WANGGD.Ansynchroniza⁃tioncontrolstrategyappliedintwocylinderssystemanditssimulation[J].MachineTool&Hydraulics,2003,31(3):232-239.[7]崔海朋.基于S7-300的排管机械手双缸同步控制系统设计[J].机电工程技术,2019,48(6):133-134.CUIHP.Designofthetwocylindershydraulicsynchroniza⁃tioncontrolsystemofpipe⁃pandlingmanipulatorbasedonS7-300[J].Mechanical&ElectricalEngineeringTechnol⁃ogy,2019,48(6):133-134.[8]HALIMAH,ISMAILI.TreephysiologyoptimizationonSI⁃SOandMIMOPIDcontroltuning[J].NeuralComputingandApplications,2019,31(11):7571-7581.[9]周玉伟,章青,石云飞.连续顶升液压控制系统仿真分析与验证[J].中国机械工程,2018,29(16):1936-1942.ZHOUYW,ZHANGQ,SHIYF.Simulationandverifica⁃tionofhydrauliccontrolsystemsforcontinuouslifting[J].ChinaMechanicalEngineering,2018,29(16):1936-1942.[10]何小映.基于MCGS的PID控制参数自整定研究[J].电子设计工程,2019,27(20):55-58.㊃86㊃机床与液压第49卷HEXY.StudyonPIDcontrolwithparametersself⁃tuningbasedonMCGS[J].ElectronicDesignEngineering,2019,27(20):55-58.[11]杨军虎,姜丙孝,苗森春,等.泵作透平发电系统设计及PID参数整定[J].兰州理工大学学报,2019,45(5):50-54.YANGJH,JIANGBX,MIAOSC,etal.DesignofpowergeneratorsystemwithreversiblesetofpumpasturbineandPIDparametersetting[J].JournalofLanzhouUniver⁃sityofTechnology,2019,45(5):50-54.[12]GHOSHS,PANS.SensitivitymodelbasedPIDcontrollerforvarioushigh⁃orderprocesses[J].COMPEL-theInter⁃nationalJournalforComputationandMathematicsinElec⁃tricalandElectronicEngineering,2019,38(6):1855-1873.[13]郑志国.顶升钢平台模架体液压控制系统的设计[J].机电工程技术,2016,45(9):45-47.ZHENGZG.Liftingbodydesignofhydrauliccontrolsys⁃temofsteelplatformformwork[J].Mechanical&Electri⁃calEngineeringTechnology,2016,45(9):45-47.[14]杨慧,凌玉华.基于PLC的3150kN模锻液压机同步控制系统的设计[J].可编程控制器与工厂自动化,2010(2):81-85.YANGH,LINGYH.Thedesignofsynchronouscontrolsystemin3150kNforginghydraulicpressbasedonPLC[J].ProgrammableController&FactoryAutomation,2010(2):81-85.[15]苌晓兵,汤家荣,花晓阳.超高层低位顶升钢平台模架体系液压控制系统设计[J].机床与液压,2017,45(22):126-129.CHANGXB,TANGJR,HUAXY.Hydrauliccontrolsystemdesignforsuperhigh⁃risebuildinglowliftingsteelplatformformworksystem[J].MachineTool&Hydrau⁃lics,2017,45(22):126-129.[16]杨彦琳.电液比例阀控四缸同步的控制算法研究[D].兰州:兰州理工大学,2019.YANGYL.Researchoncontrolalgorithmofelectro⁃hy⁃draulicproportionalvalvecontrolfour⁃cylindersynchroni⁃zation[D].Lanzhou:LanzhouUniversityofTechnology,2019.[17]朱栋.200t大型装备多点液压同步顶升 横移系统设计及工程应用[D].西安:西安建筑科技大学,2016.ZHUD.Designandengineeringapplicationsonmultipointsynchronouslifting⁃shiftinghydraulicsystemfor200tlargeequipment[D].Xi an:Xi anUniversityofArchitectureandTechnology,2016.[18]张贵,黄静华,夏永胜.基于PLC的电液比例伺服系统模糊PID控制研究[J].机床与液压,2014,42(1):83-85.ZHANGG,HUANGJH,XIAYS.ResearchonfuzzyPIDcontrolforelectrohydraulicproportionalservosystembasedonPLC[J].MachineTool&Hydraulics,2014,42(1):83-85.[19]严刚峰.PID控制器参数整定复杂性的分析[J].成都大学学报(自然科学版),2019,38(1):64-68.YANGF.AnalysisofPIDcontrollerparametertuningcomplexity[J].JournalofChengduUniversity(NaturalScienceEdition),2019,38(1):64-68.(责任编辑:张楠)(上接第39页)[11]吴翩卉,卢杜晓,罗忠辉,等.智能机器人的超声波避障技术研发及应用[J].机床与液压,2019,47(9):46-50.WUPH,LUDX,LUOZH,etal.Developmentandap⁃plicationofultrasonicrangingandobstacleavoidingintel⁃ligentrobot[J].MachineTool&Hydraulics,2019,47(9):46-50.[12]张萍,陈国壮,候云雷,等.基于Android平台的WIFI遥控智能小车的设计[J].计算机测量与控制,2018,26(6):189-191.ZHANGP,CHENGZ,HOUYL,etal.DesignofWIFIremotecontrolintelligentcarbasedonAndroidplatform[J].ComputerMeasurement&Control,2018,26(6):189-191.[13]乔怡豪.自动跟随小车控制系统的研究[D].鞍山:辽宁科技大学,2019.QIAOYH.Researchoncontrolsystemofauto⁃followingrobot⁃car[D].Anshan:UniversityofScienceandTechnol⁃ogyLiaoning,2019.[14]邓良益,易佳,王浩,等.一种基于PID算法的智能小车设计[J].科技创新与应用,2019(30):93-94.DENGLY,YIJ,WANGH,etal.AnintelligentcardesignbasedonPIDalgorithm[J].TechnologyInnovationandApplication,2019(30):93-94.[15]肖奇军,郑健聪,陈斯鹏,等.一种基于地图构建与角度传感器的扫地机器人自动回充方法[J].机械与电子,2019,37(2):78-80.XIAOQJ,ZHENGJC,CHENSP,etal.Anautomaticre⁃chargemethodofsweepingrobotbasedonmapconstruc⁃tionandanglesensor[J].Machinery&Electronics,2019,37(2):78-80.[16]范逸伦.自动跟随机器人研究及其测试系统开发[D].哈尔滨:哈尔滨工程大学,2018.FANYL.Researchonautomatictrackingrobotanddesignofitsevaluationsystem[D].Harbin:HarbinEngineeringUniversity,2018.(责任编辑:张艳君)㊃96㊃第11期魏列江等:顶模体系中多缸同步顶升液压控制系统设计㊀㊀㊀。
自升式塔式起重机顶升过程详解
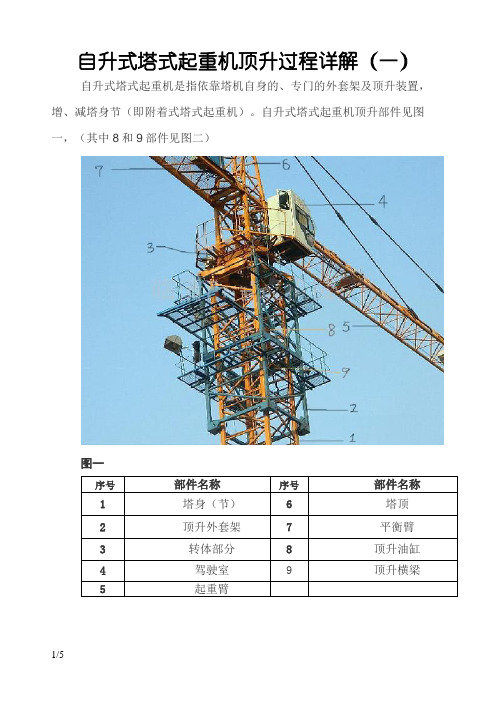
自升式塔式起重机顶升过程详解(一)自升式塔式起重机是指依靠塔机自身的、专门的外套架及顶升装置,增、减塔身节(即附着式塔式起重机)。
自升式塔式起重机顶升部件见图一,(其中8和9部件见图二)图一序号部件名称序号部件名称1 塔身(节) 6 塔顶2 顶升外套架7 平衡臂3 转体部分8 顶升油缸4 驾驶室9 顶升横梁5 起重臂图二自升式塔式起重机的顶升是通过液压顶升油缸8来完成自升的;与顶升油缸8上铰点相连的上部结构(部件2、3、4、5、6、7)可随油缸8的伸出(收缩),做上移(或下移)动作,实现塔机顶升(降落)过程。
具体操作如下:(一)、首先在塔机进行安装、顶升操作时,必须由具有受过塔机操作特殊培训的,并持有特种设备操作上岗证的人员进行操作,严禁无证操作。
操作人员在进行操作前,必须掌握塔机使用说明书中相关内容,对设备性能进行全面了解。
(二)、先通过塔机吊起一节节,并放置于塔机外套架上的节引进装置上,如图三所示。
(三)、再用起重臂吊起一节节,通过变幅小车前后移动,使塔机起重臂5与平衡臂7保持平衡,如图四所示;锁紧回转,此时拧开转体部分3下端与塔身节1的紧固螺栓,等待顶升操作。
图三图四(四)、派专人协调并扶正顶升横梁9,使顶升横梁9两端的活动插销插入塔身节的爬升爪圆孔内,并确保两端活动插销均伸出塔身节的爬升爪圆孔并且,伸出端不少于5mm,如图二和图五所示,在确认顶升横梁9,安装到位后,方可开动液压顶升油缸8,进行顶升作业,顶升过程中操作人员要密切关注个零部件的状态,遇有疑问时,要及时停止顶升作业。
图五(五)、当油缸达到活动行程后,需要进行换步,此时需要用外套架的活动插销,将已经顶起的部分(部件部件2、3、4、5、6、7)销住,然后缩回顶升横梁9的活动插销,收进油缸8。
重复在操作第(四)步,完成第二步、或三步顶升后,使油缸的顶升高度足以满足节引入,此时,引入第(二)步中预放置的节,并拧紧节螺栓,至此完成一次顶升加节。
塔机顶升流程
塔机顶升流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!塔机顶升流程一、准备工作阶段在进行塔机顶升操作之前,需要进行全面且细致的准备工作。
基于PLC的流动舞台车顶升液压同步控制系统

r e c t i o n a l v a l v e a r e d e s i g n e d . K e y wo r d s : mo b i l e s t a g e v e h i c l e ; l i ti f n g s y n c ro h n i z a t i o n ; P LC c o n t r o l ; p r o p o r t i o n a l v a l v e
和控 制程 序 、
关键 词 : 流 动舞 台车 ; 顶升 同步 ; P L C控 制 ; 比例 换 向 阀
De s i g n o f Hy d r a u l i c L i f t i n g Sy n c h r O n i z a t i O n Co n t r o l Sy s t e m o f Mo b i l e St a g e
前 顶 升 油缸 6的 速 度 由节 流 阀 4控 制 ,系统 经 过 调试稳定后 . 节 流 阀 4的 节 流 1 2 1 开 度锁 定 。后 顶 升 油 缸 7的速 度 由 比例 换 向 阀 2控 制 ,其 控 制 原 理 为 : 当
HM I 及
PLC 控 制 系 统
顶 升启 动时 . 电磁 换 向 阀 1 得 电工 作 , 前 顶 升 油 缸 运
Ab s t r a c t :T h e h y d r a u l i c l i ti f n g s y n c h r o n i z a t i o n s y s t e m o f mo b i l e s t a g e v e h i c l e i s i n t r o d u c e d . Ac c o r d i n g t o s t r i c t a n d
露天矿山工程同步顶升装置研究
露天矿山工程同步顶升装置研究
赵鹏;刘千山;刘钊;侯金程
【期刊名称】《机械工程与自动化》
【年(卷),期】2024()2
【摘要】国内一些露天矿山在维修大型工程设备时,由于没有适用的顶升装置,造成维修效率低、人工成本高且存在安全隐患等问题。
为解决上述问题,设计研发了一套广泛适用于各种矿用工程设备的同步举升装置,该装置主要由顶升油缸、液压同步顶升系统、监测传感系统、控制台和手持控制器组成,能够安全实现大型工程设备检修操作时的水平上升与下降,同时可在任何位置停止顶升操作并进行安全锁定,适应各种工作情况下的检修作业。
实际应用表明:该装置工作稳定且安全可靠,极大地提高了维修效率、降低了生产成本。
【总页数】4页(P177-179)
【作者】赵鹏;刘千山;刘钊;侯金程
【作者单位】国能宝日希勒能源有限公司设备维修中心
【正文语种】中文
【中图分类】TH122;TD804
【相关文献】
1.发电厂烟囱钢内筒液压同步顶升装置设计计算
2.多点同步顶升装置电液系统的集成设计
3.废弃露天矿山生态保护修复实践研究——以卡顶山矿区生态修复工程为
例4.立德树人背景下农林院校课程思政协同创新研究5.浅谈综采工作面收尾的施工技术研究
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种新型的顶升油缸及系统
传统的顶升油缸除提高了安全系数外,基本机构都和普通的油缸一样。
所受负载和承载腔压力相互作用的结果使得活塞/柱塞杆顶出或回缩,只有两者相互平衡的时候,才能把顶升的物件停留在一个位置上。
但是这种平衡是很脆弱的,顶升过程中细微的摩擦甚至油压的波动,都能打破这种平衡。
所以,要维持这平衡状态,只有靠伺服阀/比例阀对顶升油缸承载腔压力进行动态控制,致使目前的顶升系统都用伺服阀/比例阀进行闭环控制。
事实上,由于闭环系统控制参数对于工况(压力、流量、控制容积,温度等)、控制管路长度非常敏感,造成顶升实施前需要大量的测量调整工作。
再加上闭环系统控制参数的调整对操作人员的技术要求很高,几乎是专家级的,又对用户增加了使用的难度和成本。
更重要的是,现有的系统对于4缸以上的多缸同步,其实施的技术难度很大,也包括对单个油缸的超高压要求。
现在出现了一种最新的技术‐‐4H伺服机构,这种伺服机构主要由控制芯棒和分配阀套组成。
它的特点是,在油压的作用下,控制芯棒和分配阀套轴向相对位置的变化只决定于它们相互之间的角位移。
例如,控制芯棒顺时针旋转而分配阀套不转,分配阀套由活塞带动向上运动;当控制芯棒逆时针旋转而分配阀套不转,则分配阀套由活塞带动向下运动。
如果控制芯棒分配阀套之间没有相对的的角位移,则它们轴向的相对位置由油缸的工作腔伺服定位。
其实质就是一个机液位置伺服机构,类似于曾出现过的的数字缸。
但由于没有滚珠丝杆之类的机械传动付作为中间环节,所以频响更高,精度更高。
如果在油缸内部构造一个4H伺服机构,使每个油缸都是自动位置伺服的,前文所述的问题都可以迎刃而解。
这就意味着,在油缸负载能力范围之内,这种油缸的位置只取决于其内部的伺服电机/步进电机接受到的脉冲指令(不采用机械的螺纹传动,如滚珠丝杠等),其精度完全可以控制在0.1mm范围之内。
虽然整个系统中也需要位移传感器,但其目的只是出于安全的考虑,而不是作为偏差量进入控制环节,和现有系统的使用目的有着本质的区别。
可以说,一个系统中有着数字电路地址分配极限(2的N次方)之内数量的油缸,以小于0.1mm的精度同步顶升,是一个前所未有的突破。
在系统的组织方面,油缸与液压泵站可以任意组合,不必拘泥于一拖几,每个油缸单独接收系统的位置控制信号,所以整个系统的构建可以象
搭积木一样,给用户极大的方便。
在具体操作的工序方面,只需在计算载荷分布后进行预顶升,确认各缸负载在其能力范围之内,如有不够,换直径大些的或增加油缸数量即可。
这种系统的操作非常简单,操作人员经过短期的培训都能熟练使用。
所以,无论从工期的角度,还是从人员要求的角度,这种系统无疑是有着得天独厚的优势。