Pt100铂电阻测温电路(稳定版)
pt100温度检测电路 (2)

3.2温度检测电路
温度检测电路主要检测的是Pt100传输的电压信号,采用三线制接法,可分为恒流源电路、桥式检测电路及放大输出电路,其电路图如图3所示。
图3 温度检测电路
为调高电路的抗干扰能力,采用恒流源为温度检测电路供电,其电路图如图4所示。
该电流源利用了稳压管的特性,可通过调节电阻R1获得0.58mA~11.96mA的恒定电流。
而由于Pt100在2mA情况下线性度较好,此处调节R1使得恒流源输出2mA。
图4 恒流源电路
桥式检测电路如图5所示。
Pt100在2mA条件下有较好的线性度且温度在0~150℃范围内每升高1℃阻值增加0.3908Ω。
另外,通过调整电阻R5使Pt100在0℃输出为0V,这样即可根据输出电压值求出相应温度。
图5 桥式检测电路
由于桥式检测电路输出信号较小,需通过放大电路进行信号放大,其电路如图6所示。
根据电路图可知最终输出电压为。
由于单片机读取模拟量信号范围为0~3V,在假定量程为0~150℃的情况下,温度每增加1℃输出电压增大20mA,因此调节R12为279Ω即可。
图6 放大输出电路。
PT100温度传感器测量电路

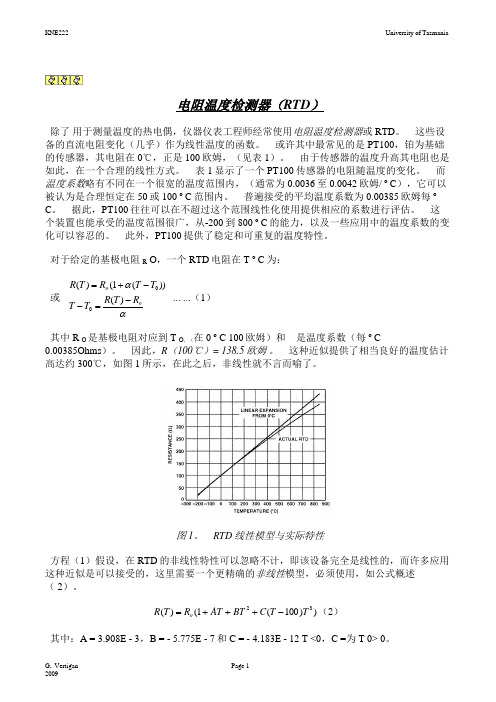
PT100温度传感器测量电路温度传感器PT100是一种稳定性和线性都比较好的铂丝热电阻传感器,可以工作在 -200℃至 650℃的范围.本电路选择其工作在 -19℃至500℃范围。
整个电路分为两部分,一是传感器前置放大电路,一是单片机 A/D 转换和显示,控制,软件非线性校正等部分。
前置放大部分原理图如下:工作原理:传感器的接入非常简单,从系统的 5V 供电端仅仅通过一支 3K92 的电阻就连接到 PT100 了.这种接法通常会引起严重的非线性问题,但是.由于有了单片机的软件校正作为后盾,因此就简化了传感器的接入方式.按照 PT100 的参数,其在 0℃到 500℃的区间内,电阻值为 100 至280.9Ω,我们按照其串联分压的揭发,使用公式:Vcc/(PT100+3K92)* PT100 = 输出电压(mV),可以计算出其在整百℃时的输出电压,见下面的表格:单片机的 10 位 A/D 在满度量程下,最大显示为 1023 字,为了得到PT100 传感器输出电压在显示 500 字时的单片机 A/D 转换输入电压,必须对传感器的原始输出电压进行放大,计算公式为:(500/1023 * Vcc)/传感器两端电压( mV/℃ ) ,(Vcc=系统供电=5V),可以得到放大倍数为10.466 。
关于放大倍数的说明:有热心的用户朋友询问,按照 (500/1023 * Vcc)/传感器两端电压不能得到 10.466 的结果,而是得到 11.635的结果。
实际上,500 个字的理想值是无法靠电路本身自然得到的,自然得到的数字仅仅为 450 个字,因此,公式中的 500℃在实际计算时的取值是 450 而不是 500 。
450/1023*5/(0.33442-0.12438)≈10.47 。
其实,计算的方法有多种,关键是要按照传感器的 mV/℃为依据而不是以被测温度值为依据,我们看看加上非线性校正系数:10.47*1.1117=11.639499 ,这样,热心朋友的计算结果就吻合了。
PT100温度测量电路
电阻温度检测器(RTD)除了用于测量温度的热电偶,仪器仪表工程师经常使用电阻温度检测器或RTD。
这些设备的直流电阻变化(几乎)作为线性温度的函数。
或许其中最常见的是PT100,铂为基础的传感器,其电阻在0℃,正是100欧姆,(见表1)。
由于传感器的温度升高其电阻也是如此,在一个合理的线性方式。
表1显示了一个PT100传感器的电阻随温度的变化。
而温度系数略有不同在一个很宽的温度范围内,(通常为0.0036至0.0042欧姆/ º C),它可以被认为是合理恒定在50或100 º C范围内。
普遍接受的平均温度系数为0.00385欧姆每ºC。
据此,PT100往往可以在不超过这个范围线性化使用提供相应的系数进行评估。
这个装置也能承受的温度范围很广,从-200到800 º C的能力,以及一些应用中的温度系数的变化可以容忍的。
此外,PT100提供了稳定和可重复的温度特性。
对于给定的基极电阻R O,一个RTD电阻在T º C为:或ααooRTRTTTTRTR-=--+=)())(1()(... (1)其中R O是基极电阻对应到T O,(在0 º C 100欧姆)和是温度系数(每º C0.00385Ohms)。
因此,R(100℃)= 138.5欧姆。
这种近似提供了相当良好的温度估计高达约300℃,如图1所示,在此之后,非线性就不言而喻了。
图1。
RTD线性模型与实际特性方程(1)假设,在RTD的非线性特性可以忽略不计,即该设备完全是线性的,而许多应用这种近似是可以接受的,这里需要一个更精确的非线性模型,必须使用,如公式概述( 2)。
))100(1()(32TTCBTATRTRo-+++=(2)其中:A = 3.908E - 3,B = - 5.775E - 7和C = - 4.183E - 12 T <0,C =为T 0> 0。
温度信息可以从一个RTD通过测量其电阻,或者通过应用已知的电流并测量产生的电压,反之亦然。
pt100温度测量电路图(电子发烧友)

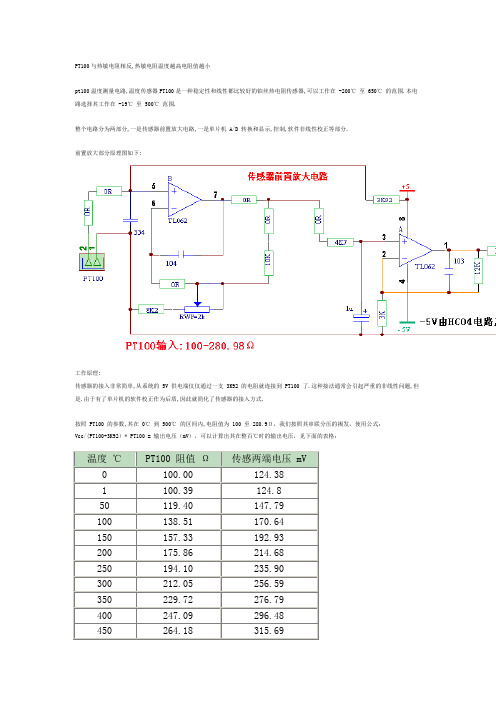
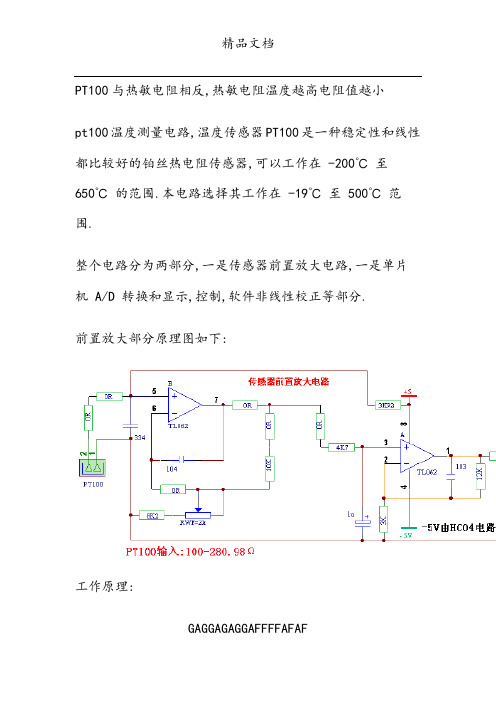
PT100与热敏电阻相反,热敏电阻温度越高电阻值越小pt100温度测量电路,温度传感器PT100是一种稳定性和线性都比较好的铂丝热电阻传感器,可以工作在 -200℃ 至650℃ 的范围.本电路选择其工作在 -19℃ 至500℃ 范围.整个电路分为两部分,一是传感器前置放大电路,一是单片机 A/D 转换和显示,控制,软件非线性校正等部分.前置放大部分原理图如下:工作原理:传感器的接入非常简单,从系统的 5V 供电端仅仅通过一支 3K92 的电阻就连接到 PT100 了.这种接法通常会引起严重的非线性问题,但是.由于有了单片机的软件校正作为后盾,因此就简化了传感器的接入方式.按照 PT100 的参数,其在0℃ 到500℃ 的区间内,电阻值为 100 至280.9Ω,我们按照其串联分压的揭发,使用公式:Vcc/(PT100+3K92)* PT100 = 输出电压(mV),可以计算出其在整百℃时的输出电压,见下面的表格:温度℃PT100 阻值Ω传感两端电压 mV0 100.00 124.381 100.39 124.850 119.40 147.79100 138.51 170.64150 157.33 192.93200 175.86 214.68250 194.10 235.90300 212.05 256.59350 229.72 276.79400 247.09 296.48450 264.18 315.69单片机的 10 位 A/D 在满度量程下,最大显示为 1023 字,为了得到 PT100 传感器输出电压在显示 500 字时的单片机 A/D 转换输入电压,必须对传感器的原始输出电压进行放大,计算公式为:(500/1023 * Vcc)/传感器两端电压( mV/℃ ) ,(Vcc=系统供电=5V),可以得到放大倍数为 10.466 。
关于放大倍数的说明:有热心的用户朋友询问,按照 (500/1023 * Vcc)/传感器两端电压不能得到 10.466 的结果,而是得到 11.635的结果。
pt100温度测量电路图(电子发烧友)
PT100与热敏电阻相反,热敏电阻温度越高电阻值越小pt100温度测量电路,温度传感器PT100是一种稳定性和线性都比较好的铂丝热电阻传感器,可以工作在 -200℃ 至650℃ 的范围.本电路选择其工作在 -19℃ 至500℃ 范围.整个电路分为两部分,一是传感器前置放大电路,一是单片机 A/D 转换和显示,控制,软件非线性校正等部分.前置放大部分原理图如下:工作原理:传感器的接入非常简单,从系统的 5V 供电端仅仅通过一支 3K92 的电阻就连接到 PT100 了.这种接法通常会引起严重的非线性问题,但是.由于有了单片机的软件校正作为后盾,因此就简化了传感器的接入方式.按照 PT100 的参数,其在0℃ 到500℃ 的区间内,电阻值为 100 至280.9Ω,我们按照其串联分压的揭发,使用公式:Vcc/(PT100+3K92)* PT100 = 输出电压(mV),可以计算出其在整百℃时的输出电压,见下面的表格:温度℃PT100 阻值Ω传感两端电压 mV0 100.00 124.381 100.39 124.850 119.40 147.79100 138.51 170.64150 157.33 192.93200 175.86 214.68250 194.10 235.90300 212.05 256.59350 229.72 276.79400 247.09 296.48450 264.18 315.69单片机的 10 位 A/D 在满度量程下,最大显示为 1023 字,为了得到 PT100 传感器输出电压在显示 500 字时的单片机 A/D 转换输入电压,必须对传感器的原始输出电压进行放大,计算公式为:(500/1023 * Vcc)/传感器两端电压( mV/℃ ) ,(Vcc=系统供电=5V),可以得到放大倍数为 10.466 。
关于放大倍数的说明:有热心的用户朋友询问,按照 (500/1023 * Vcc)/传感器两端电压不能得到 10.466 的结果,而是得到 11.635的结果。
PT100高精度测温电路AD623+REF3030(很稳定)
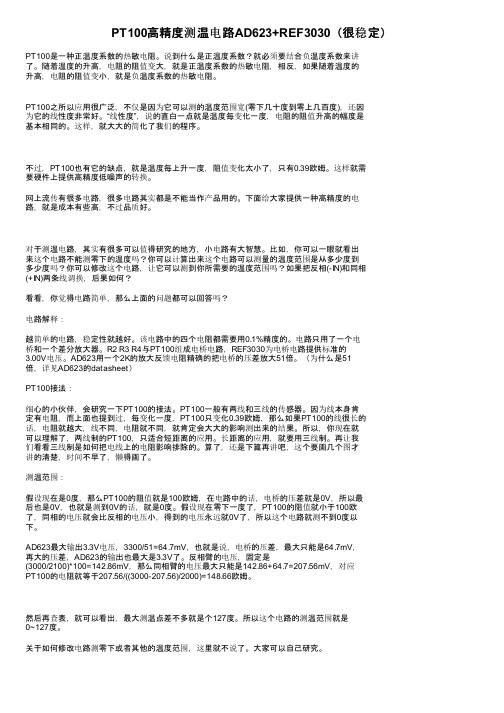
PT100高精度测温电路AD623+REF3030(很稳定)PT100是一种正温度系数的热敏电阻。
说到什么是正温度系数?就必须要结合负温度系数来讲了。
随着温度的升高,电阻的阻值变大,就是正温度系数的热敏电阻,相反,如果随着温度的升高,电阻的阻值变小,就是负温度系数的热敏电阻。
PT100之所以应用很广泛,不仅是因为它可以测的温度范围宽(零下几十度到零上几百度),还因为它的线性度非常好。
“线性度”,说的直白一点就是温度每变化一度,电阻的阻值升高的幅度是基本相同的。
这样,就大大的简化了我们的程序。
不过,PT100也有它的缺点,就是温度每上升一度,阻值变化太小了,只有0.39欧姆。
这样就需要硬件上提供高精度低噪声的转换。
网上流传有很多电路,很多电路其实都是不能当作产品用的。
下面给大家提供一种高精度的电路,就是成本有些高,不过品质好。
对于测温电路,其实有很多可以值得研究的地方,小电路有大智慧。
比如,你可以一眼就看出来这个电路不能测零下的温度吗?你可以计算出来这个电路可以测量的温度范围是从多少度到多少度吗?你可以修改这个电路,让它可以测到你所需要的温度范围吗?如果把反相(-IN)和同相(+IN)两条线调换,后果如何?看看,你觉得电路简单,那么上面的问题都可以回答吗?电路解释:越简单的电路,稳定性就越好。
该电路中的四个电阻都需要用0.1%精度的。
电路只用了一个电桥和一个差分放大器。
R2 R3 R4与PT100组成电桥电路,REF3030为电桥电路提供标准的3.00V电压。
AD623用一个2K的放大反馈电阻精确的把电桥的压差放大51倍。
(为什么是51倍,详见AD623的datasheet)PT100接法:细心的小伙伴,会研究一下PT100的接法。
PT100一般有两线和三线的传感器。
因为线本身肯定有电阻,而上面也提到过,每变化一度,PT100只变化0.39欧姆,那么如果PT100的线很长的话,电阻就越大,线不同,电阻就不同,就肯定会大大的影响测出来的结果。
Pt100热电阻的测温电路

┊
┊ 度有关的参数。在温度 检测精度要求比较高的场合,这种传感器比较适用。目前较
装
┊ 为广泛的热电阻材料为铂、铜、镍等,它们具有电阻温度系数大、线性好、性能稳定、
┊ 使用温度范围宽、 加工容易等特点。用于测量-200℃~+500℃范围内的温度。
┊
┊
温度测量系统应用广泛,涉及到各行各业的各个方面,在各种不同的领域中都占
┊
┊ 通过轴上的整流滤波电路得到±5V 的直流电源,该电源做运算放大器 AD822 的工作
┊
┊ 电源;由基准电源 AD589 与双运放 AD822 组 成的高精度稳压电源产生±4.5V 的精密
┊
直流电源,该电源既作为电桥电源,又作为放大器及 V/F 转换器的工作电源。当弹性
轴 受扭 时,应变桥检 测得到的 mV 级的应 变信号通过仪 表放大 器 AD620 放大成
1.5v±1v 的强信号,再通过 V/F 转换器 LM131 变换成频率信号,通过信号环形变压
器 T2 从旋转的初级 线圈传递至静止次级线圈,再经过外壳上的信号处理电路滤波、
整形即可得到与弹性轴承受的扭矩成正比的频率信号,该信号为 TTL 电平,既可提供
给专用二次仪 表或频率计显示也可直接送计算机处理。由于该旋转变压器动--静环
┊ currently the most widely used platinum and copper, in addition, have now begun
┊
┊ using nickel, manganese and rhodium and other material thermal resistance.
多新领域:例如在宏观上要观察上千光年的茫茫宇宙,微观上要观察小到 cm 的粒子
pt100 测温电路
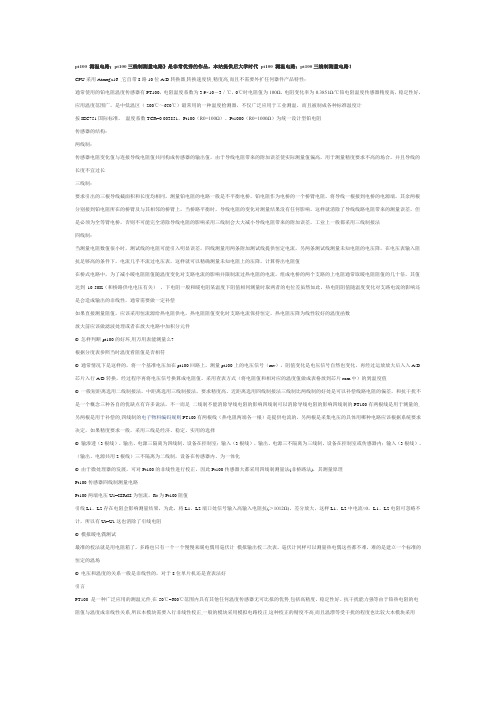
pt100 测温电路:pt100三线制测量电路》是非常优秀的作品,本站提供后大学时代pt100 测温电路:pt100三线制测量电路!CPU采用Atmega16 ,它自带8路10位A/D转换器,转换速度快,精度高,而且不需要外扩任何器件产品特性:通常使用的铂电阻温度传感器有PT100,电阻温度系数为3.9×10-3/℃,0℃时电阻值为100Ω,电阻变化率为0.3851Ω/℃铂电阻温度传感器精度高,稳定性好,应用温度范围广,是中低温区(-200℃~650℃)最常用的一种温度检测器,不仅广泛应用于工业测温,而且被制成各种标准温度计按IEC751国际标准,温度系数TCR=0.003851,Pt100(R0=100Ω)、Pt1000(R0=1000Ω)为统一设计型铂电阻传感器的结构:两线制:传感器电阻变化值与连接导线电阻值共同构成传感器的输出值,由于导线电阻带来的附加误差使实际测量值偏高,用于测量精度要求不高的场合,并且导线的长度不宜过长三线制:要求引出的三根导线截面积和长度均相同,测量铂电阻的电路一般是不平衡电桥,铂电阻作为电桥的一个桥臂电阻,将导线一根接到电桥的电源端,其余两根分别接到铂电阻所在的桥臂及与其相邻的桥臂上,当桥路平衡时,导线电阻的变化对测量结果没有任何影响,这样就消除了导线线路电阻带来的测量误差,但是必须为全等臂电桥,否则不可能完全消除导线电阻的影响采用三线制会大大减小导线电阻带来的附加误差,工业上一般都采用三线制接法四线制:当测量电阻数值很小时,测试线的电阻可能引入明显误差,四线测量用两条附加测试线提供恒定电流,另两条测试线测量未知电阻的电压降,在电压表输入阻抗足够高的条件下,电流几乎不流过电压表,这样就可以精确测量未知电阻上的压降,计算得出电阻值在桥式电路中,为了减小暖电阻阻值随温度变化对支路电流的影响并限制流过热电阻的电流,组成电桥的两个支路的上电阻通常取暖电阻阻值的几十倍,其值达到10-50K(和桥路供电电压有关),下电阻一般和暖电阻某温度下阻值相同测量时取两者的电位差虽然如此,热电阻阻值随温度变化对支路电流的影响还是会造成输出的非线性,通常需要做一定补偿如果直接测量阻值,应该采用恒流源给热电阻供电,热电阻阻值变化时支路电流保持恒定,热电阻压降为线性较好的温度函数放大前应该做滤波处理或者在放大电路中加积分元件Ø 怎样判断pt100的好坏,用万用表能测量么?根据分度表参照当时温度看阻值是否相符Ø 通常情况下是这样的,将一个基准电压加在pt100回路上,测量pt100上的电压信号(mv),阻值变化是电压信号自然也变化,再经过运放放大后入入A/D 芯片入行A/D转换,经过程序再将电压信号换算成电阻值,采用查表方式(将电阻值和相对应的温度值做成表格放到芯片rom中)的到温度值Ø 一般短距离选用二线制接法,中距离选用三线制接法,要求精度高、近距离选用四线制接法三线制比两线制的好处是可以补偿线路电阻的偏差,和抗干扰不是一个概念三种各自的优缺点有许多说法,不一而足二线制不能消除导线电阻的影响四线制可以消除导线电阻的影响四线制的PT100有两根线是用于测量的,另两根是用于补偿的,四线制的电子物料编码规则PT100有两根线(热电阻两端各一根)是提供电流的,另两根是采集电压的具体用哪种电路应该根据系统要求决定,如果精度要求一般,采用三线是经济、稳定、实用的选择Ø 输渗透(3根线)、输出、电源三隔离为四线制,设备在控制室;输入(3根线)、输出、电源三不隔离为三线制,设备在控制室或传感器内;输入(3根线)、(输出、电源共用2根线)三不隔离为二线制,设备在传感器内、为一体化Ø 由于微处理器的发展,可对Pt100的非线性进行校正,因此Pt100传感器大都采用四线制测量法(非桥路法),其测量原理Pt100传感器四线制测量电路Pt100两端电压U1=ISRtIS为恒流,Rt为Pt100阻值引线L1、L2存在电阻会影响测量结果,为此,将L1、L2端口处信号输入高输入电阻抗(>1012Ω),差分放大,这样L1、L2中电流≈0,L1、L2电阻可忽略不计,所以有Ui=U1这也消除了引线电阻Ø 模拟暖电偶测试最准的校法就是用电阻箱了,多路也只有一个一个慢慢来暖电偶用毫伏计模拟输出校二次表,毫伏计同样可以测量热电偶这些都不难,难的是建立一个标准的恒定的温场Ø 电压和温度的关系一般是非线性的,对于8位单片机还是查表法好引言PT100 是一种广泛应用的测温元件,在-50℃~600℃范围内具有其他任何温度传感器无可比拟的优势,包括高精度、稳定性好、抗干扰能力强等由于铂热电阻的电阻值与温度成非线性关系,所以本模块需要入行非线性校正,一般的模块采用模拟电路校正,这种校正的精度不高,而且温漂等受干扰的程度也比较大本模块采用了软件查表插值的方法入行校正,最后转换成III型信号III型信号是当被测信号从下量程到上量程(0%~100%)变化时,输出线上对应4-20mA 电流的变化此外模块还具有MODBUS协议的通讯端口,可以直接和任何MODBUS口连接图1 采样电路图2 主机电路图3 D/A电路系统设计整个模块基于AVR新型的Atmega16单片机,采用三线制形式,这样可以去除导线电阻带来的零点不准确,经过差分放大电路直接得到0~5V的信号电压,这样就可以直接输入到A/D转换器数据处理部分,将PT100分度表中的每隔10℃的电阻值写渗透到闪存中,这样,将得到电压值往返算到电阻值,这样进行查表,当电阻位于某一段之间时,再进行线性处理,这样系统的线性化程度比较高可以达到0.2%D/A转换系统采用373芯片作为锁存器,采用权电阻网络进行D/A转换,这样可以节省成本,而且精度也可以得到保证最后再经过一个电压电流转换部分,把信号以III型信号传送出去,完成模块的功能图4 V/I转换电路图5 485通讯电路采样电路采样电路如图1所示,PT100以三线制接到J0,这样连接PT100的两侧的导线长度相等,而且分别加在两侧的桥臂上,这样导线电阻得以消除,当PT100输出100Ω时可以调节R1的阻值,以调整温度下限,当温度范围是0~300℃时,电桥电压经过放大后,Anolog0的电压正好是0~5V, 这样可以完整使用单片机的A/D转换器的转换精度主机电路主机电路如图274LS138用来译码,分别选通各路的锁存器采用8MHz的晶振,速度完全可电子书免费下载聪明以满意系统的要求A/D转换的参考电压直接是V CC,这可节省硬件,简化电路,在对精度要求较高的情况下可以选择精密稳压器件,如TL431D/A转换电路为了节省成本,本系统没有采用专用D/A转换芯片,而是运用D/A转换的原理,利用权电阻网络进行D/A转换器,这样精度可以保证,而且速度比较快,CPU控制也是比较简单的电路如图3所示74lS373锁存器,锁存CPU每次更新的数据,OE引脚接138芯片的片选信号,LE 下降沿时数据锁存V/I转换电路V/I转换电路如图4所示,它将A/D转换后得到的电压信号,转换成4-20mA III型信号输出I=V/R3RS-485通讯电路通讯芯片选用MAX485芯片,将收允许和发允许接在一起(见图5),用一个口线进行控制,正常情况下,收允许,在需要发送的时候,设为发允许图6 软件流程软件设计软件设计是本系统的关键,也是与众不同的地方一般的铂电阻转III型信号的模块都是采用模拟电路,没有软件部分本系统采用数字化线性校正将大大提高模块的精度软件流程见图6软件分主程序,中断服务子程序,所有程序均由C语言编写程序在ICCAVR6.30调试结语基于单片机的PT100-III型信号转换模块具有精度高、可数字通讯、可升级等优点本模块已经用于多个火力发电厂烟气温度检测,其中采用III型信号和数字通讯的都有,均取得了良好的效果。
实用低成本PT100测温电路两例_V1.0

实用PT100测温电路两例概述PT100铂热电阻是一种常用的温度传感器。
其测温原理是利用了金属铂自身电阻随着温度近乎线性变化的特点。
相较于其他测温元件(热电偶和热敏电阻),PT100铂热电阻的热稳定性好、精度高、漂移小,通常用在-200℃~600℃范围内的精密测温系统中。
PT100测温探头一般有2线、3线和4线这几种引线方式。
3线和4线的引线方式,主要是为了后面的调理电路能修正引线电阻带来的影响。
当然,引线越多,探头价格越贵。
PT100铂热电阻在0℃时是100Ω,当温度每变化1℃,电阻变化约0.385Ω。
如果引线电阻1Ω,那么会引入大约2.56℃的误差。
所以设计时应根据实际情况,选用不同的引线方式。
对于要求不高,引线不长(<0.5米)的系统,此时引线电阻很小,一般几十毫欧,引线电阻引入的误差可以忽略,推荐使用2线方式。
对于引线比较长的系统,引线电阻比较大,而且阻值不可预测,则应使用3线或4线方式。
根据IEC60751标准,PT100铂热电阻的阻值与温度之间关系如下:其中:下表是PT100铂热电阻的温度-电阻速查表:温度℃电阻值Ω温度℃电阻值Ω温度℃电阻值Ω温度℃电阻值Ω-20018.5220107.79240190.47460267.56-18027.1040115.54260197.71480274.29-16035.5460123.24280204.90500280.98-14043.8880130.90300212.05520287.62-12052.11100138.51320219.15540294.21-10060.26120146.07340226.21560300.75-8068.33140153.58360233.21580307.25-6076.33160161.05380240.18600313.71-4084.27180168.48400247.09620320.12-2092.16200175.86420253.96640326.480100.00220183.19440260.78660332.79表1PT100温度-电阻速查表PT100铂热电阻温度采集系统主要有两种实现方式:1.恒流方式,2.电桥方式。
pt100温度测量电路图(电子发烧友)
PT100与热敏电阻相反,热敏电阻温度越高电阻值越小pt100温度测量电路,温度传感器PT100是一种稳定性和线性都比较好的铂丝热电阻传感器,可以工作在 -200℃ 至650℃ 的范围.本电路选择其工作在 -19℃ 至500℃ 范围.整个电路分为两部分,一是传感器前置放大电路,一是单片机 A/D 转换和显示,控制,软件非线性校正等部分.前置放大部分原理图如下:GAGGAGAGGAFFFFAFAF传感器的接入非常简单,从系统的 5V 供电端仅仅通过一支3K92 的电阻就连接到 PT100 了.这种接法通常会引起严重的非线性问题,但是.由于有了单片机的软件校正作为后盾,因此就简化了传感器的接入方式.按照 PT100 的参数,其在0℃ 到500℃ 的区间内,电阻值为 100 至280.9Ω,我们按照其串联分压的揭发,使用公式:Vcc/(PT100+3K92)* PT100 = 输出电压(mV),可以计算出其在整百℃时的输出电压,见下面的表格:GAGGAGAGGAFFFFAFAF单片机的 10 位 A/D 在满度量程下,最大显示为 1023 字,为了得到 PT100 传感器输出电压在显示 500 字时的单片机 A/D 转换输入电压,必须对传感器的原始输出电压进行放大,计算公式为:(500/1023 * Vcc)/传感器两端电压( mV/℃ ) ,(Vcc=系统供电=5V),可以得到放大倍数为 10.466 。
关于放大倍数的说明:有热心的用户朋友询问,按照(500/1023 * Vcc)/传感器两端电压不能得到 10.466 的结果,而是得到 11.635的结果。
实际上,500 个字的理想值GAGGAGAGGAFFFFAFAF是无法靠电路本身自然得到的,自然得到的数字仅仅为 450 个字,因此,公式中的500℃ 在实际计算时的取值是 450 而不是 500 。
450/1023*5/(0.33442-0.12438)≈10.47 。
最新pt100温度传感器测量电路
p t100温度传感器测量电路pt100温度传感器测量电路温度传感器PT100是一种稳定性和线性都比较好的铂丝热电阻传感器,可以工作在 -200℃至 650℃的范围.本电路选择其工作在 -19℃至500℃范围.整个电路分为两部分,一是传感器前置放大电路,一是单片机 A/D 转换和显示,控制,软件非线性校正等部分.前置放大部分原理图如下:工作原理:传感器的接入非常简单,从系统的 5V 供电端仅仅通过一支 3K92 的电阻就连接到 PT100 了.这种接法通常会引起严重的非线性问题,但是.由于有了单片机的软件校正作为后盾,因此就简化了传感器的接入方式.按照 PT100 的参数,其在 0℃到 500℃的区间内,电阻值为 100 至280.9Ω,我们按照其串联分压的揭发,使用公式:Vcc/(PT100+3K92)* PT100 = 输出电压(mV),可以计算出其在整百℃时的输出电压,见下面的表格:温度℃PT100 阻值Ω传感两端电压 mV0100.00124.381100.39124.850119.40147.79100138.51170.64150157.33192.93200175.86214.68250194.10235.90单片机的 10 位 A/D 在满度量程下,最大显示为 1023 字,为了得到 PT100 传感器输出电压在显示 500 字时的单片机 A/D 转换输入电压,必须对传感器的原始输出电压进行放大,计算公式为:(500/1023 * Vcc)/传感器两端电压( mV/℃ ) ,(Vcc=系统供电=5V),可以得到放大倍数为 10.466 。
关于放大倍数的说明:有热心的用户朋友询问,按照 (500/1023 * Vcc)/传感器两端电压不能得到 10.466 的结果,而是得到 11.635的结果。
实际上,500 个字的理想值是无法靠电路本身自然得到的,自然得到的数字仅仅为 450 个字,因此,公式中的 500℃在实际计算时的取值是 450 而不是 500 。
Pt100铂电阻测温电路(稳定版)
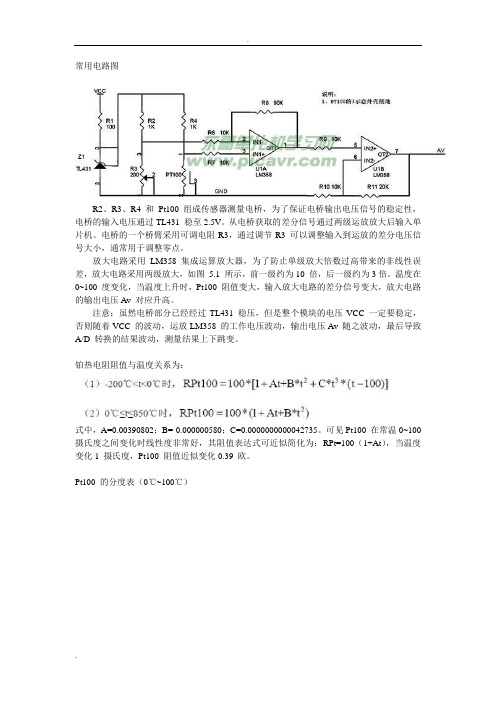
常用电路图R2、R3、R4 和Pt100 组成传感器测量电桥,为了保证电桥输出电压信号的稳定性,电桥的输入电压通过TL431 稳至2.5V。
从电桥获取的差分信号通过两级运放放大后输入单片机。
电桥的一个桥臂采用可调电阻R3,通过调节R3 可以调整输入到运放的差分电压信号大小,通常用于调整零点。
放大电路采用LM358 集成运算放大器,为了防止单级放大倍数过高带来的非线性误差,放大电路采用两级放大,如图 5.1 所示,前一级约为10 倍,后一级约为3倍。
温度在0~100 度变化,当温度上升时,Pt100 阻值变大,输入放大电路的差分信号变大,放大电路的输出电压Av 对应升高。
注意:虽然电桥部分已经经过TL431 稳压,但是整个模块的电压VCC 一定要稳定,否则随着VCC 的波动,运放LM358 的工作电压波动,输出电压Av 随之波动,最后导致A/D 转换的结果波动,测量结果上下跳变。
铂热电阻阻值与温度关系为:式中,A=0.00390802;B=-0.000000580;C=0.0000000000042735。
可见Pt100 在常温0~100摄氏度之间变化时线性度非常好,其阻值表达式可近似简化为:RPt=100(1+At),当温度变化1 摄氏度,Pt100 阻值近似变化0.39 欧。
Pt100 的分度表(0℃~100℃)程序处理一般在使用PT100 的温度采集方案中,都会对放大器LM358 采集来的模拟信号A V进行温度采样,即进行A/D 转换。
A/D 处理包括两方面内容,一是A/D 值的滤波处理,二是A/D 值向实际温度转换。
由于干扰或者电路噪声的存在,在采样过程当中会出现采样信号与实际信号存在偏差的现象,甚至会出现信号的高低波动,为了减小这方面原因造成的测量误差,在实际采样时采样18 个点,然后再除去其中偏差较大的两个点,即一个最大值和一个最小值,再对剩余的16 个点取均值,这样得到的A/D 转换结果比较接近实际值。
PT100测温电路

文件编号:INVT0_013_0008_CBB_01CBB规范PT100测温电路(VER:V1.0)拟制:时间:2009-09-05批准:时间:文件评优级别:□A优秀□B良好□C一般1 功能介绍PT100是铂电阻温度传感器,他适用于-60℃到400℃之间的温度,因其测量范围大,线性度好,稳定性强等特点而被广泛使用。
铂电阻温度传感器是利用金属铂在温度变化时自身电阻值也随之改变的特性来测量温度的,当被测介质中存在温度梯度时,所测得的温度是感温元件所在范围内介质层中的平均温度。
2 详细原理图+3.3+15-15+3.3-15+15+3.3AI5-AD恒流源1mAPT100 从-150至+150度阻值39.72-157.33欧PT1000 从-150到+150度阻值397.2-1573.3欧PT100+电压范围0.78V-3.14VPT100 : 拨码开关断开 放大20倍 PT1000:拨码开关选通 放大2 倍+-U1B TL08256784CN1CON212T11PIN1T21PIN1C10.1uC30.1u+-U2ATL08232184D1123C40.1uC61n/2kV+-U1A TL08232184R3 3.3k +-U2B TL08256784C50.1uC20.1uD2123R9100kR4100kR82kR71kR62k R1051kR251k R151kR111k R121kR1418kR1318k SW1SW DIP-112R551k图1 PT100电路原理图为了把PT100的温度变化的电阻信号转换成电压信号以方便微处理器测量,通过恒流源电路将PT100电阻信号转换为电压信号,再经过放大及A/D 转换后送微处理器进行处理。
3 器件功能图1中虚线方框内是产生1mA 的恒流源;二极管D1、D2为箝位作用,将电压限制在0V ~+3.3V ,保护运算放大器的安全工作电压; U2A 为电压跟随器; U2B 为同相输入运算放大器; 4 参数计算1) 恒流源电流计算图1中虚线方框内恒流源是正反馈平衡式,由于负载接地而受到人们的喜爱,使用中也可以把电阻R1取的比负载大的多,而省略跟随器运放。
PT100 铂热电阻测温实验
实验二十四 PT100 铂热电阻测温实验实验知识储备1.铂热电阻工作原理铂热电阻元件作为一种温度传感器,其工作原理是在温度作用下,铂电阻丝的电阻值随着温度的变化而变化。
温度和电阻的关系接近于线性关系,偏差极小且随着时间的增长,偏差可以忽略,具有可靠性好、热响应时间短等优点,且电气性能稳定。
铂热电阻是一种精确、灵敏、稳定的温度传感器。
铂热电阻元件是用微型陶瓷管、孔内装绕制好的铂热电阻丝脱胎线圈制成感温元件,由于感温元件可以做得相当小,因此它可以制成各种微型温度传感器探头。
可用于-200~+420℃范围内的温度。
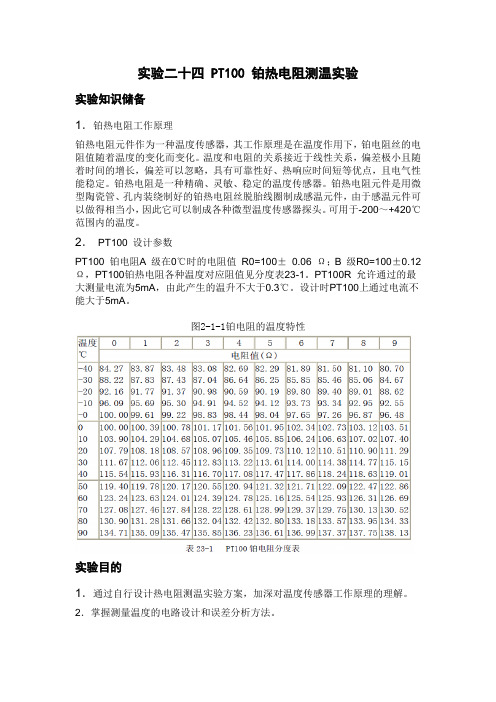
2.PT100 设计参数PT100 铂电阻A 级在0℃时的电阻值R0=100±0.06 Ω;B 级R0=100±0.12 Ω,PT100铂热电阻各种温度对应阻值见分度表23-1。
PT100R 允许通过的最大测量电流为5mA,由此产生的温升不大于0.3℃。
设计时PT100上通过电流不能大于5mA。
图2-1-1铂电阻的温度特性实验目的1.通过自行设计热电阻测温实验方案,加深对温度传感器工作原理的理解。
2.掌握测量温度的电路设计和误差分析方法。
实验内容1.设计PT100 铂热电阻测温实验电路方案;2.测量PT100 的温度与电压关系,要求测温范围为:室温~65℃;温度测量精度:±2℃;输出电压≤4V,输出以电压V方式记录。
3.通过测量值进行误差分析。
实验步骤1、完成系统方案设计;实验方案初步设定为如下:图2-实验方案电路图电阻阻值计算:考虑图中电路,当铂电阻变化ΔR时,电桥电压:ΔU=E2−R3ER3+R0+ΔR0=EΔR02(R3+R0+ΔR0),只有当R3取很大时才能保持线性。
故取R3为350欧姆,R1和R2以及电位器选用仪器上的变阻器,通过调整使节点1和节点2对应的电压差为零,这样当铂电阻受温度的影响发生变化时就会引起节点间的电压差,在实验时,考虑到差动放大器可以临时调节放大倍数,所以此处放大器只作为更进一步调节的备用元件。
pt100测温电路(经典测温范围)
pt100测温电路(经典测温范围)pt100 测温电路(经典测温范围):温度传感器PT100,可以工作在-200 度到650 度的范围。
整个电路分为两部分,一是传感器前置放大电路,一是单片机AD 转换和显示控制软件非线性校正等部分。
传感器前置放大电路:后级单片机的电路原理图:PT100 计算公式PT100 计算公式热电阻是中低温区最常用的一种温度检测器,它主要特点就是测量精度高,性能稳定.下面的是在单片机程序中我自己使用计算公式: 一:相关资料中给出的公式: 1. 铂热电阻的温度特性.在0~850℃范围内Rt=R0(1+At+Bt2) 在-200~0℃范围内Rt=R0[1+At+Bt2+C(t-100)t3] 式中A,B,C 的系数各为:A=3.90802 乘以103℃-1 B=-5.802 乘以107℃-2 C=-4.27350 乘以1012℃-4 2. 铜热电阻的温度特性:在-50~150℃范围内Rt=R0[1+At+Bt2+Ct3] A=4.28899 乘以103℃1 B=-2.133 乘以107℃2 C=1.233 乘以109℃3 二,程序中我自己使用的计算公式: 2.温度测量技术(PT100): 当T 0 RT=Rt 当T 420 RT= Rt+ Rt2*2.15805393*10-6 当0T 420 RT= Rt*[1+(R420-Rt)*3.301723797*10-7]+ Rt2*2.15805393*10-6 相关系数及说明: RT 为对应与温度的线形值,其结果等效于显示温度值Rt 为实际测量的阻抗值,其值是已经减去100(电桥差放的参考值)的值对应的16 进制值: 3.301723797*10-7 = B142h * 237 2.15805393*10-6 = 90D3h * 234 R420 = (25390-10000)*2.517082601*128 = 4BA8F3h(4958451.35736192) 其中这里的结果都是已经乘100 的值,在显示的时候应该先处理. 三:温度测量技术(CU50): RT=Rt(1+at) RT 和Rt 分别为温度为T℃和0℃时候的阻抗值. a 为铜电阻的温度系数.一般取4.25 乘以103/℃~4.28乘以103/℃tips:感谢大家的阅读,本文由我司收集整编。
PT100四线制测温电路

『电阻式温度检测器』(RTD,Resistance Temperature Detector)-一种物质材料作成的电阻,它会随温度的上升而改变电阻值,如果它随温度的上升而电阻值也跟著上升就称为正电阻係数,如果它随温度的上升而电阻值反而下降就称为负电阻系数。
大部分电阻式温度检测器是以金属作成的,其中以白金(Pt)作成的电阻式温度检测器,最为稳定-耐酸碱、不会变质、相当线性...,最受工业界采用。
PT100温度感测器是一种以白金(Pt)作成的电阻式温度检测器,属于正电阻系数,其电阻和温度变化的关系式如下:R=Ro(1+αT)其中α=0.00392,Ro为100Ω(在0℃的电阻值),T为摄氏温度因此白金作成的电阻式温度检测器,又称为PT100。
1:Vo=2.55mA ×100(1+0.00392T)=0.255+T/1000 。
2:量测Vo时,不可分出任何电流,否则量测值会不準。
电路分析由于一般电源供应较多零件之后,电源是带杂讯的,因此我们使用齐纳二极体作为稳压零件,由于7.2V齐纳二极体的作用,使得1K电阻和5K可变电阻之电压和为6.5V,靠5K可变电阻的调整可决定电晶体的射(集极)极电流,而我们须将集极电流调为2.55mA,使得量测电压V如箭头所示为0.255+T/1000。
其后的非反向放大器,输入电阻几乎无限大,同时又放大10倍,使得运算放大器输出为2.55+T/100。
6V齐纳二极体的作用如7.2V齐纳二极体的作用,我们利用它调出2.55V,因此电压追随器的输出电压V1亦为2.55V。
其后差动放大器之输出为Vo=10(V2-V1)=10(2.55+T/100-2.55)=T/10,如果现在室温为25℃,则输出电压为2.5V。
相关文章: 铂电阻测温电路的线性化设计方法摘要:介绍一种基于A/D转换原理的铂电阻测温的非线性校正方法,分析了铂电阻线性测温的原理,并给出了A/D转换器7135与单片机89C51接口电路及试验数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常用电路图R2、R3、R4 和Pt100 组成传感器测量电桥,为了保证电桥输出电压信号的稳定性,电桥的输入电压通过TL431 稳至2.5V。
从电桥获取的差分信号通过两级运放放大后输入单片机。
电桥的一个桥臂采用可调电阻R3,通过调节R3 可以调整输入到运放的差分电压信号大小,通常用于调整零点。
放大电路采用LM358 集成运算放大器,为了防止单级放大倍数过高带来的非线性误差,放大电路采用两级放大,如图 5.1 所示,前一级约为10 倍,后一级约为3倍。
温度在0~100 度变化,当温度上升时,Pt100 阻值变大,输入放大电路的差分信号变大,放大电路的输出电压Av 对应升高。
注意:虽然电桥部分已经经过TL431 稳压,但是整个模块的电压VCC 一定要稳定,否则随着VCC 的波动,运放LM358 的工作电压波动,输出电压Av 随之波动,最后导致A/D 转换的结果波动,测量结果上下跳变。
铂热电阻阻值与温度关系为:式中,A=0.00390802;B=-0.000000580;C=0.0000000000042735。
可见Pt100 在常温0~100摄氏度之间变化时线性度非常好,其阻值表达式可近似简化为:RPt=100(1+At),当温度变化1 摄氏度,Pt100 阻值近似变化0.39 欧。
Pt100 的分度表(0℃~100℃)程序处理一般在使用PT100 的温度采集方案中,都会对放大器LM358 采集来的模拟信号A V进行温度采样,即进行A/D 转换。
A/D 处理包括两方面内容,一是A/D 值的滤波处理,二是A/D 值向实际温度转换。
由于干扰或者电路噪声的存在,在采样过程当中会出现采样信号与实际信号存在偏差的现象,甚至会出现信号的高低波动,为了减小这方面原因造成的测量误差,在实际采样时采样18 个点,然后再除去其中偏差较大的两个点,即一个最大值和一个最小值,再对剩余的16 个点取均值,这样得到的A/D 转换结果比较接近实际值。
在对数值进行滤波操作之后,还要将A/D 值转换为温度,常用的两种方法为查表法和公式法:查表法比较麻烦,而且精度也不高,适合于线性化较差的NTC 温度传感器;公式法比较简单,只需要确定比例系数K 和基准偏差B 即可,适合于线性化较好的传感器温度转换的C 语言实现过程为:fT = (ADC_data * K) –B; //换算成温度值。
得到温度后,一般还会对被控对象根据实际温度和目标温度进行实时的控制,要又要设计到控制算法,如:模糊控制、PID 调节等。
这里简单介绍一下PID 控制原理,更多内容请察看相关书籍。
PID 工作原理PID(Proportional Integral Derivative)控制是控制工程中技术成熟、应用广泛的一种控制策略,经过长期的工程实践,已形成了一套完整的控制方法和典型的结构。
它不仅适用于数学模型已知的控制系统中,而且对于大多数数学模型难以确定的工业过程也可应用,在众多工业过程控制中取得了满意的应用效果。
由于来自外界的各种扰动不断产生,要想达到现场控制对象值保持恒定的目的,控制作用就必须不断的进行。
若扰动出现使得现场控制对象值(以下简称被控参数)发生变化,现场检测元件就会将这种变化采集后经变送器送至PID 控制器的输入端,并与其给定值(以下简称SP 值)进行比较得到偏差值(以下简称e 值),调节器按此偏差并以我们预先设定的整定参数控制规律发出控制信号,去改变调节器的开度,使调节器的开度增加或减少,从而使现场控制对象值发生改变,并趋向于给定值(SP 值),以达到控制目的,如图所示,其实PID 的实质就是对偏差(e 值)进行比例、积分、微分运算,根据运算结果控制执行部件的过程。
温度控制PID 算法设计利用了上面所介绍的位置式PID 算法,将温度传感器采样输入作为当前输入,然后与设定值进行相减得偏差,然后再对之进行PID 运算产生输出结果fOut,然后让fOut 控制定时器的时间进而控制加热器。
为了方便PID 运算,首先建立一个PID 的结构体数据类型,该数据类型用于保存PID 运算所需要的P、I、D 系数,以及设定值,历史误差的累加和等信息:typedef struct PID{float SetPoint; // 设定目标Desired Valuefloat Proportion; // 比例系数Proportional Constfloat Integral; // 积分系数Integral Constfloat Derivative; // 微分系数Derivative Constint LastError; // 上次偏差int SumError; // 历史误差累计值} PID;PID stPID; // 定义一个stPID 变量PID 运算的C 实现代码float PIDCalc( PID *pp, int NextPoint ){int dError,Error;Error = pp->SetPoint*10 -NextPoint; // 偏差,设定值减去当前采样值pp->SumError += Error; // 积分,历史偏差累加dError = Error-pp->LastError; // 当前微分,偏差相减pp->PrevError = pp->LastError; // 保存pp->LastError = Error;return (pp->Proportion * Error+ pp->Integral * pp->SumError-pp->Derivative * dError);}其中(pp->Proportion * Error)是比例项;(pp->Integral * pp->SumError)是积分项;(pp->Derivative * dError)是微分。
基于Ptl00铂热电阻的温度变送器设计与实现温度是表征物体冷热程度的物理量,在工业生产、生活应用和科学研究中是一个非常重要的参数。
在工业控制过程中需要对控制对象进行温度监测,防止控制对象由于温度过高而损坏,因此温度的实时监测就显得更加重要。
对温度的实时监测有利于对控制对象的及时检查、保护,并及时调整温度的高低。
根据控制系统设计要求的不同,温度监测系统的设计也有所变化,有采用集成芯片的,也有采用恒流源器件和恒压源器件的。
因铂热电阻具有测量范围大,稳定性好,示值复现性高和耐氧化等优点,该系统采用PtlOO铂热电阻作为温度感测元件,进行温度传感器的设计与实现。
在设计中,将电压信号转换为标准的4~20 mA 电流信号,既省去昂贵的补偿导线,又提高了信号长距离传送过程中的抗干扰能力。
l Ptl00铂热电阻概述电阻值随温度的变化程度称为温漂系数,大部分金属材料的温漂系数是正数,而且许多纯金属材料的温漂系数在一定温度范围内保持恒定,具体应用中选用哪一种金属材料(铂、铜、镍等)取决于被测温度的范围。
金属铂(Pt)电阻的温度响应特性较好,成本较低,可测量温度较高;它在0 ℃的额定电阻值是100 Ω,是一种标准化器件。
工作温度范围:-200~+850 ℃,考虑到工业的实际应用,本系统设计的测量范围为0~120℃。
因为热敏电阻的阻值和温度呈正比关系,只需知道流过该电阻的电流就可以得到与温度成正比的输出电压。
根据已知的电阻-温度关系,可以计算出被测量的温度值。
Ptl00温度感测器是一种以铂(Pt)做成的电阻式温度检测器,其电阻和温度变化的关系式为:式中:R0为O ℃下的电阻值,R0=10O Ω;T为摄氏温度。
因此,用铂做成的电阻式温度检测器,又称为Ptl00温度传感器,即:显然,电阻与温度呈非线性关系,但当测量精度要求较低时,电阻值与温度的函数关系可以简化为:实际应用中,Ptl00的连接方式可以为两线制、三线制或四线制。
该系统采用三线制接法即可满足要求。
二线制连接时,由于引线电阻与Ptl00串联,增大了电阻,会影响测量;三线制连接时,对Ptl00额外增加了第三条线,由于引线电阻具有相同特性,能够对线电阻进行补偿;四线制连接时,可以实现Kelvin检测,消除了两线连线的压差。
2 系统结构与工作原理对PtlOO温度传感器进行了硬件设计。
其整个数据采集系统结构框图如图1所示。
图1中,利用铂热电阻特性来检测温度,将温度转换成电压信号;再通过V/l转换单元,将电压信号转为4~20 mA的标准电流信号输出,这样既省去昂贵的补偿导线,又提高了信号长距离传送过程中的抗干扰能力;在单片机系统上再由电流电压转换芯片RCV420将4~20 mA转换为O~5 V电压信号。
经过A /D转换成数字信号,单片机系统把读取到的数字信号进行识别处理,并换算成与温度对应的数字信号,最后再由液晶显示器显示输出温度值。
CPU主要完成对A/D采集到的数据进行处理,包括A/D值的滤波处理和A/D值向实际温度转换,最后送给显示器显示。
3 硬件设计硬件组成主要由稳定电源电路、运算放大电路、电压电流转换电路、电流电压转换电路四个部分组成。
3.1 稳定电源电路稳定电源电路如图2所示。
LP2951是S1PEX公司推出的低功耗电压调节器,非常适用于一些电池供电系统,如无绳电话、无线控制系统及便携式电脑。
具有低静态电流、低压差等特性(轻微负载时,压差为50 mV;100 mA负载时,压差为380 mV)。
LP2951具有很小的初始容限(一般0.5%),非常良好的负载及线路调节特性(一般0.05%),并具有非常低的温度系数(20 ppm/℃),因此非常适合用作低功耗电压源。
LP-2951可以通过引脚连接得到5 V电压,使用内部分压器通过引脚1(输出)及引脚2(Sense)及引脚7(反馈)到引脚6(5 V端),获得输出、Sense、反馈、5 V端电压。
同样,还可以通过1.235 V的参考源获得其他输出电压,最大30 V。
3.2 主电路分析R7,R8,R4,RP1和Ptl00组成传感器测量电桥,为了保证电桥输出电压信号的稳定性,电桥的输入电压由LP2951电源芯片来提供。
从电桥获取的差分电压信号通过两级运放放大后,再经过电压/电流转换电路,转换为4~20 mA的标准电流信号输出,因为A/D只能采集电压信号,所以在信号进行A/D采集前,再通过芯片RCV420将4~20 mA转换为O~5 V电压信号。
电桥的一个桥臂采用可调电阻RP1,通过调节RP1,可以调整输入到运放的差分电压信号大小,通常用于调整零点。
放大电路采用LM258集成运算放大器,为了防止单级放大倍数过高带来的非线性误差,放大电路采用两级放大,其中可调电阻RP2用于调节放大电路的增益。