三角高程测量的经典总结
三角高程测量实习报告精选

三角高程测量实习报告精选三角高程测量实习报告精选一、实习概况1、实习时间:2、实习地点:3、指导老师:4、实习目的:通过实习了解三角高程的测量原理,从而使我们更加明白三角高程的公式和计算,并熟练的在一般的测量工作中应用三角高程的方法来传递高程,以方便测量。
5、实习设备:经纬仪三脚架棱镜6、实习内容:三角高程测量二、实习步骤1、在测区选定4个控制点形成一条闭合的环线;并对选好的控制点做好标记,对每个控制点钉上小钉;并初步画出导线网的略图。
2、再选一个定向的控制点5号点,把全站仪安置在1号点,进行对中、整平;并在5号点安置后视棱镜,在2号点安置前视棱镜;最后量取经纬仪的仪器高和前、后视棱镜高并记录在手薄上。
3、对中、整平工作完以后,先盘左用经纬仪瞄准5号点的棱镜中心位置,精准后制动水平和竖直制动螺旋,固定全站仪的方向,然后操作经纬仪把5好点置盘(即把5号点归为零方向),并记录出平距L和竖盘读数。
4、顺时针旋转经纬仪,瞄准2号点,同步上述的操作,分别记录出平距、竖盘读数、水平方向值读数。
5、倒转望远镜,再次瞄准2号方向,同样操作记录平距、竖盘读数、水平方向值读数;再逆时针旋转至5号点进行同样观测和记录。
6、记录完毕后,初步检查测量的正确行,如果可行,即可把经纬仪搬到2号点,两棱镜依次放在后视的1号点上和前视的3号点上;然后同上述进行观测和记录,依次类推,依次在1-2-3-4号控制点上安置经纬仪进行观测和读数。
7、初步计算导线网的角度闭合差和高差闭合差是否超限,若符合即可野外测量完成。
8、进行计算。
三、实习中引起的误差原因及解决方法1、边长误差边长误差决定于距离丈量方法。
用普通视距法测定距离,精度只有1/300;用电磁波测距仪测距,精度很高,边长误差一般为几万分之一到几十万分之一。
边长误差对三角高程的影响与垂直角大小有关,垂直角愈大,其影响也愈大。
2、垂直角误差垂直角观测误差包括仪器误差、观测误差和外界环境的影响。
全站仪三角高程测量的原理、方法、精度分析

摘要在工程建设的勘测、施工中常常涉及到高程测量,现场采用的测量方法主要是水准测量和三角高程测量。
水准测量精度高,但是速度比较慢,效率低。
此外,水准测量的转点多,而且标尺与仪器也存在下沉误差,如果在丘陵、山区等地使用水准测量进行高程传递是非常困难的,有时甚至是不可能的。
近些年来,由于全站仪的发展,使得测角、测距的精度不断提高。
三角高程测量传递高程比较灵活、方便、受地形条件限制较少等优点,因此全站仪三角高程测量补充了水准测量不能在山区等地形起伏较大的地区施测的不足,成为水准测量的重要方法。
本文对全站仪三角高程测量的原理、方法、精度等进行了分析,认为用全站仪代替水准仪进行高程测量,在一定范围内可达到三等水准测量要求。
关键词:全站仪三角高程精度分析等级水准AbstractIn the construction survey, construction often involve the height measurement, the scene is the leveling measurement method is mainly used and trigonometric leveling. Leveling precision, but at a slower speed, low efficiency. In addition, the turning point of leveling and gauge and instrument is also sinking error, if in the hills, mountains and other places using the leveling elevation transfer is very difficult, sometimes even impossible. In recent years, due to the development of the total station, the accuracy of Angle, distance to improve. Trigonometric leveling elevation is more flexible and convenient, and the advantages of less restricted by terrain conditions, so the triangle elevation surveying added leveling can't in mountainous terrain volatile regions such as measured by the insufficiency, has become an important method of leveling. In this paper, the principle and method of total station triangle elevation measurement, precision are analyzed, such as that using total station to replace the level height measurement, within a certain range can be up to three, the fourth level measurement requirements.Key Words:Total station, Triangle elevation, Accuracy analysis, Order leveling目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1 前言 (1)1.1.1 研究目的与意义 (1)1.2 国内外研究现状 (2)1.2.1 国内研究现状 (2)1.2.2 国外研究现状 (2)1.3 本文研究内容 (3)第2章全站仪三角高程测量原理和观测方法 (4)2.1 全站仪三角高程的基本理论 (4)2.1.1 全站仪三角高程测量的原理 (4)2.1.2三角高程测量的基本公式 (5)2.2 全站仪三角高程测量的方法 (7)2.2.1对向观测法 (7)2.2.2中间测量法 (8)第3章三角高程与几何水准高程误差及精度的对比研究 (9)3.1 全站仪对向观测法的精度分析 (9)3.2 全站仪中间观测法的精度分析 (11)3.3 三角高程测量方法的比较 (13)第4章实例分析 (15)4.1 测量过程 (15)4.2 观测结果分析 (17)第5章结论与展望 (19)致谢 (20)参考文献 (21)第1章绪论1.1 前言测量地面待定点的高程,传统的方法是通过仪器测量待测点与已知点间的高差,然后计算出待测点的高程。
测绘师《综合能力》知识点:三角高程测量
测绘师《综合能力》知识点:三角高程测量
三角高程测量
三角高程测量是通过两点间的距离和垂直角(或天顶距),利用三角公式推求其高差,确定待定点高程的技术和方法。
在传统大地测量中,三角高程测量是测定各等级大地点高程的基本方法。
(一)垂直角观测方法
垂直角观测方法有中丝法、三丝法两种。
各等级三角点上每一方向按中丝法观测时应测四测回,三丝法观测时应测二测回。
l中丝法:以望远镜十字丝的水平中丝为准,照准目标测定垂直角。
l三丝法:以望远镜三根水平丝为准,依次照准同一目标来测定垂直角。
l(二)高差计算公式
l用水平距离和垂直角计算;
l用倾斜距离和垂直角计算。
(三)三角高程测量的精度
根据理论推导和实测三角高程精度统计,对向高差中数的中误差,在最不利的观测条件下所达到的精度为
式中,mh单位为m;s单位为km。
三角高程测量原理、误差分析及应用(精)

三角高程测量1 三角高程测量的基本原理三角高程测量是通过观测两点间的水平距离和天顶距(或高度角)求定两点间的高差的方法。
它观测方法简单,不受地形条件限制,是测定大地控制点高程的基本方法。
目前,由于水准测量方法的发展,它已经退居次要位置,但在山区和丘陵地带依然被广泛采用。
在三角高程测量中,我们需要使用全站仪或者经纬仪测量出两点之间的距离(水平距离或者斜距和高度角,以及测量时的仪器高和棱镜高,然后根据三角高程测量的公式推算出待测点的高程。
由图中各个观测量的表示方法,AB两点间高差的公式为:h=S0tanα+i1-i2 ①但是,在实际的三角高程测量中,地球曲率、大气折光等因素对测量结果精度的影响非常大,必须纳入考虑分析的范围。
因而,出现了各种不同的三角高程测量方法,主要分为:单向观测法,对向观测法,以及中间观测法。
1.1 单向观测法单向观测法是最基本最简单的三角高程测量方法,它直接在已知点对待测点进行观测,然后在①式的基础上加上大气折光和地球曲率的改正,就得到待测点的高程。
这种方法操作简单,但是大气折光和地球曲率的改正不便计算,因而精度相对较低。
1.2 对向观测法对向观测法是目前使用比较多的一种方法。
对向观测法同样要在A点设站进行观测,不同的是在此同时,还在B点设站,在A架设棱镜进行对向观测。
从而就可以得到两个观测量:直觇:hAB= S往tanα往+i往-v往+c往+r往②反觇:hBA= S返tanα返+i返-v返+c返+r返③S——A、B间的水平距离;α——观测时的高度角;i——仪器高;v——棱镜高;c——地球曲率改正;r——大气折光改正。
然后对两次观测所得高差的结果取平均值,就可以得到A、B两点之间的高差值。
由于是在同时进行的对向观测,而观测时的路径也是一样的,因而,可以认为在观测过程中,地球曲率和大气折光对往返两次观测的影响相同。
所以在对向观测法中可以将它们消除掉。
h=0.5(h AB- h BA=0.5[( S往tanα往+i往-v往+c往+r往-( S返tanα返+i返-v返+c返+r返]=0.5(S往tanα往-S返tanα返+i往-i返+v返-v往④与单向观测法相比,对向观测法不用考虑地球曲率和大气折光的影响,具有明显的优势,而且所测得的高差也比单向观测法精确。
(完整版)三角高程测量
32
2020年8月9日星期日
四、偏心误差系数的测定
基本原理:因为相对观测竖角(绝对值) 的平均值可消除竖盘偏心的影响,因此也可 通过相对观测的竖角来反映偏心误差。
测定步骤 1.为了减小竖盘指标差的影响,在平坦 地区选择两个相距约50m的固定点A、B, 在两点上竖立标尺,如图10-8所示。
33
2020年8月9日星期日
α=(R–L-180°)/2
=(278°12′24″- 81°47′36″- 180°)
= + 8°12′24″
12
2020年8月9日星期日
对高度角式注记,竖直角的计算 当竖直角为仰角时(参考前面的示意图)
α左 = L - 0° α右 = 180°- R α= (L – R + 180°)/2 (a) 当竖直角为俯角时
竖盘指标水准管
竖盘指标水准 管微动螺旋
6
图中3号螺旋为 竖盘指标水准管 微动螺旋
2020年8月9日星期日
2.竖盘的注记形式 顺时针,逆时针。
望远镜水平时,竖盘读数为90°的整倍数。
竖盘逆时针注记(盘左高度角式)
7
2020年8月9日星期日
竖盘顺时针注记(盘左天顶距式)
8
2020年8月9日星期日
3.竖角的表示形式
• 计算竖直角:各按三丝所测得的L和R分别计算出相应
的竖角,最后取平均值为该竖角的角值。
22
2020年8月9日星期日
五、指标差的检验与校正
1.测定指标差 盘左、盘右瞄准同一明显目标,观测多个测回 求得指标差。 2.求出盘左或盘右的正确读数(读数减指标 差)。 3.微调竖盘指标水准管,使竖盘位于正确读数。 4.调节竖盘水准管校正螺丝,使气泡居中。
全站仪三角高程测量不同方法的分析与应用概要课件
精密工程测量
在精密工程中,需要高精度地测量各种物体的位置和尺寸,以确保工程的精度和质量。全站仪三角高程测量方法可以满足精 密工程测量的高精度要求。
在实际应用中,可以在工程现场设置基准点和测点,利用全站仪对测点进行高程测量,获取各个位置的高程数据。这些数据 可以用于分析工程的精度和质量,及时发现误差和异常情况,为调整和修复提供依据。同时,全站仪三角高程测量方法也可 以与其他测量方法相结合,形成更加完善的测量系统,提高工程测量的精度和效率。
THANKS
感谢观看
在实际应用中,可以在矿山的周围设置基准点和监测点,利用全站仪对监测点进 行高程测量,通过与基准点的高程比较,计算出矿山的垂直位移量。同时,可以 定期进行监测,形成位移曲线,分析位移趋势,预测未来的位移情况。
水利工程的高程测量
水利工程建设和维护过程中,需要高精度地测量水库大坝、堤防等位置的高程,以确保水利工程的安 全。全站仪三角高程测量方法可以在各种复杂环境下进行高程测量。
特点
能够克服河流的障碍,快速准确地测量两岸的高程。但需要解决对 岸点的通视问题,以及考虑地球曲率和大气折射等因素的影响。
应用场景
适用于河流两岸的高程测量和工程规划等场合。
PART 03
全站仪三角高程测量的精 度分析
测量误差来源
仪器误差
气象条件影响
观测环境
操作者技能
全站仪本身存在的误差, 如望远镜、测距仪、电
子系统等部件的精度限制。
如大气折射、温差、气 压等因素对测距和角度
中点法三角高程测量的分析

全站仪中点法三角高程测量的分析(南宁东测科技有限公司,广西南宁,530023)[摘要]中点法即将全站仪架设于前后棱镜的中间,观测两点间的高程来进行高程传递的一种测量手段。
本文阐述中点法三角高程在工程测量应用的可靠性和可行性。
[关键词]中点法;三角高程;精度分析;中误差1、中点法三角高程测量的原理1.1 高差计算公式如上图所示,为求得1、2两点的高差,将全站仪设于大致在中间的M点,则有h M1=S1*cosθ1+1-k12R(S1*sinθ1)2+i-v1 (1)h M2=S2*cosθ2+1-k22R(S2*sinθ2)2+i-v2 (2)1点至2的高差为:h12=h M2-h M1=S2*cosθ2-S1*cosθ1+1-k22R(S2*sinθ2)2-1-k12R(S1*sinθ1)2+ v1-v2 (3)其中:S为经气象改正后的斜距;θ为天顶距的观测值;v为觇标高;R为地球平均曲率半径,一般地区取6371000;k为大气折光系数。
由于观测条件基本相同,可认为其折光系数k1≈k2,令k A=k B=k,代入(3)得:h12=S2*cosθ2-S1*cosθ1+1-k2R{(S2*sinθ2)2-(S1*sinθ1)2}+v1-v2 (4)根据以上推导(4)可知,用中点法三角高差测量时,不需对中,也不必量仪器高。
1.2 中误差的推导对(4)进行全微分,令D1=S1*cosθ1、D2=S2*cosθ2,则dh12=cosθ2dS2-cosθ1dS1+D1ρ2dθ1+D2ρ2dθ2+D22-D122Rdk+dv1-dv2 (5)根据误差传播定律,各观测量之间相互独立,而且观测的距离较短,则可近似认为m S12=m S22=m2s,天顶距的mθ12= mθ22= mθ2,镜高的m v12=m v22=m v2,由(5)可推得三角高程的中误差为:m h=±(cos2θ1+ cos2θ2)m S2+D12+D22ρ2mθ2+(D22-D12)24R2m k2+2m v2 (6)上式中:m s为测边中误差;mθ为天顶距观测中误差;m k为大气折光系数中误差;m v为镜高量取中误差;D为水平距离D=S*cosθ;ρ为弧度常数ρ=206265。
三角高程测量的概念、计算公式及提高精度的措施进行论述
三角高程测量的概念、计算公式及提高精度的措施进行论述三角高程测量是一种测量地面高程的方法,它通过三角形的内角、边长和高度关系,计算出观测点的高程。
三角高程测量需要测量观测点与控制点之间的距离和高差,同时还需要测量观测点与控制点之间的水平角和垂直角。
测量公式包括正弦定理、余弦定理和正切定理等,其中正弦定理和余弦定理常用于计算距离和高差,而正切定理则用于计算水平角和垂直角。
在实际测量中,还需要考虑误差来源和如何提高测量精度。
为了减小误差,可以采用多次测量取平均值的方法,使用高精度的测量仪器和设备,以及在测量前进行现场勘察和规划。
同时,还可以对数据进行处理和分析,使用数据拟合和回归分析等方法,提高测量精度和可靠性。
总之,三角高程测量是一种非常重要的测量方法,它可以应用于地形测量、工程测量等领域,具有广泛的应用前景。
在进行测量时,需要掌握基本的概念和测量公式,同时还需要注意误差来源和提高测量精度的措施。
- 1 -。
三角高程测量的经典总结

三角高程测量的经典总结---------------------------------------------------------------最新资料推荐------------------------------------------------------ 三角高程测量的经典总结2. 4 三角高程 2. 4. 1 三角高程测量原理 1、原理三角高程测量的基本思想是根据由测站向照准点所观测的垂直角(或天顶距)和它们之间的水平距离,计算测站点与照准点之间的高差。
这种方法简便灵活,受地形条件的限制较少,故适用于测定三角点的高程。
三角点的高程主要是作为各种比例尺测图的高程控制的一部分。
一般都是在一定密度的水准网控制下,用三角高程测量的方法测定三角点的高程。
如下图:现在计划测量 A、 B 间高差, 在 A 点架设仪器, B 点立标尺。
量取仪器高,使望远镜瞄准B 上一点M,它距B 点的高度为目标高,测出水平和倾斜视线的夹角,若 A、 B 水平距离 S 已知,则:注意:上式中可根据仰角或俯角有正负值之分,当取仪器高=目标高时,计算就方便了。
在已知点架站测的高差叫直占、反之为反战。
2、地球曲率与大气对测量的影响我们在水准测量中知道,高程的测量受地球曲率的影响,仪器架在中间可以消除,三角1 / 7高程也能这样,但是对于一些独立交会点就不行了。
三角高程还受大气折射的影响。
如图:加设 A 点的高程为, 在 A 点架设仪器测量求出 B 点的高程。
如图可以得出但如图有两个影响:1)、地球曲率,在前面我们已经知道,地球曲率改正2)、大气折射不易确定,一般测量中把折射曲线近似看作圆弧,其平均半径为地球半径的 6~7 倍,则:,在这里 r 就是图上的 f2。
通常,我们令下面求,如图,在三角形中: ,当测量范围在20km 以内,可以用 S 代替 L,然后对公式做一适当的改正,进行计算。
2. 4. 2 竖盘的构造及竖角的测定 1、竖盘构造 1)、构造有竖盘指标水准管,如图:竖盘与望远镜连在一起,转动望远镜是竖盘一起跟着转动;但是竖盘指标和指标水准管在一起,他们不动,只有调节竖盘水准管微动螺旋式才会移动。
三角高程测量原理及公式

三角高程测量原理及公式在三角高程测量中,经常使用的仪器是全站仪和电子经纬仪。
测量步骤一般包括:设置测站、放点、观测角度、观测距离等。
水平仪原理:水平仪是一种能够检测和测量水平面的仪器。
其原理是利用液体的重力、表面张力和液面与气泡的位置关系,来确定平面的水平度。
通过测量水平仪的指示,可以帮助确定测站点的水平位置。
水准仪原理:水准仪是一种测量仪器,用于测量水平面的相对高差。
它基于物体借助重力在水平面上的运动原理。
水准仪中的测量原理包括视线法、反射法和导线法等。
在三角高程测量中,常常使用视线法,即通过望远镜观测圆n上一点的高差与水平视线的仰角。
全站仪原理:全站仪是一种同时具备测量角度和测量距离功能的仪器。
它的原理是通过发射一个激光束或红外线,并利用光电传感器接收反射光束,测量出测站点到观测点的距离和方向。
通过测量不同测站点到同一观测点的距离,以及观测点与测站点之间的角度,可以计算出观测点的高程。
余弦定理:在一个三角形中,根据余弦定理可得:c^2 = a^2 + b^2 - 2ab·cosC正弦定理:在一个三角形中,根据正弦定理可得:a/sinA = b/sinB = c/sinC高程差公式:当在一个测点上测出一物体的仰角和水平观测距离时,利用三角形的几何关系可以推导出高程差公式:h = d·sinα其中,h为物体的高程差,d为测站点到物体的水平距离,α为测站点到物体垂线与水平线之间的夹角。
综上所述,三角高程测量是一种通过测量三角形的边长和角度来推导出物体高程信息的测量方法。
其原理基于几何关系和三角函数的运算。
在实际测量中,需要使用水平仪、水准仪或全站仪等仪器,并通过测量角度和距离,应用余弦定理、正弦定理和高程差公式等公式,进行测量计算。
三角高程测量法的基本原理与实施步骤

三角高程测量法的基本原理与实施步骤高程测量是地理测量中的一个重要组成部分,它是确定地点在垂直方向上的高度差,从而推导出地形的起伏和变化情况。
三角高程测量法是一种常用且较为精确的高程测量方法之一,本文将介绍三角高程测量法的基本原理与实施步骤。
一、三角高程测量法的基本原理三角高程测量法基于三角形的相似性原理,它通过一个已知高度的基准点和两个相邻点之间的水平距离来计算出相邻点的高度差。
其基本原理如下:1. 角度测量:首先,我们需要测量出两个相邻点相对于基准点的水平方向的角度。
这可以通过定向测量仪等测量设备来完成。
测量精度要求高时,可以使用全站仪等高精度仪器。
2. 距离测量:在角度测量完成后,我们需要通过测距仪、测距杆等工具测量出基准点和相邻点之间的水平距离。
测距精度将直接影响测量结果的准确性。
3. 高度差计算:测量完成后,我们可以利用三角形的相似性原理,根据已知的角度和距离计算出两个相邻点的高度差。
具体计算方式是利用三角函数中的正切函数来求解高度差。
二、三角高程测量法的实施步骤实际进行三角高程测量时,我们需要按照一定的步骤来进行,以确保测量结果的准确性和可靠性。
下面是三角高程测量法的实施步骤:1. 确定基准点:首先,我们需要选择一个已知高度的基准点。
这个基准点可以是大地水准点、气象台、水坝等高程已知的地物。
在选择基准点时,需要考虑地理位置的便利性和高程的稳定性。
2. 设置测量站:在确定基准点后,我们需要设置测量站点,并在测量站点上安装测量设备,如全站仪等。
测量站点的选择应考虑到地势的平坦性和视线的通畅性,以确保能够准确测量角度和距离。
3. 开展测量:在测量站点设置完毕后,我们可以开始进行角度和距离的测量工作。
首先,利用测量设备测量出基准点和相邻点之间的水平角度;然后,利用测距仪等设备测量出基准点和相邻点之间的水平距离。
4. 计算高度差:在完成测量后,我们可以根据已知的角度、距离和基准点的高度,利用三角函数的运算来计算出相邻点的高度差。
第七章 三角高程测量

270°
180°
0°
x
90°
指标差有正负之分: 若指标线偏移方向与竖盘注记方向一致,指标差为正; 若指标线偏移方向与竖盘注记方向相反,指标差为负。
15
第七章 三角高程测量 §7-2 竖盘构造及竖直角的测定
1、竖盘指标差对竖直角的影响
盘左:正确的度盘读数: 盘右:正确的度盘读数:
L′=L-x R′=R-x
19
第七章 三角高程测量 §7-2 竖盘构造及竖直角的测定
举例:
测 目 竖盘 竖盘读数 半测回竖直角
站 标 位置
°′″
°′″
左
M右
O
左
N右
81 18 42 278 41 30 124 03 30 235 56 54
+8 41 18 +8 41 30 -34 03 30 -34 03 06
指标差 ″
式中:
D——各边的水平距离,km [D²]=D1²+ D2²+ D3²+……+Dn² [D]=D1+ D2+ D3+……+Dn
29
§7-3 三角高程测量的应用
当fh≤fh容时,按以下原则分配fh: 将fh反符号,按与边长成正比例的原则分配。
3、计算改正后的高差 根据高差闭合差的分配原则计算高差改正数,求出 各边改正后的高差。
已知HA,欲测定HB。 AB两点间的高差h:
h Stg i v
B点的高程为:
HB H A Stg i v 3
第七章 三角高程测量 §7-1 三角高程测量的原理
直觇
仪器设在已知高程点,观测与待定 点之间的高差。
反觇
仪器设在待定点,观测与已知高程 点之间的高差。
三角高程测量计算.
+0.425
-0.987
A
HA=76.432m 备注 28.859 +0.003 -0.003 0.000
m f h f h容 f h容 0.05 D 2 0.008
f h 0.003m
三角高程测量计算
C
HA=77.420m
B
HB=76.996m HA=76.432m
A
四.三角高程测量的精度等级
二.三角高程测量的施测
(1)将全站仪安置在测站A上,量仪器高i和 棱镜高t。 (2)用十字丝照准棱镜中心,全站仪上显示 的高差为仪器中心到棱镜中心的高度,即VD
H B H A h AB H A V D i A t B f
(3)将经纬仪搬至B点,同法对A点进行观测。
H B H A h BA H A ( V D i B - t A) f
50 .38
52.10
1.48 3.20
0.06
0.11 52.07
105 .72 157 .79
三角高程测量计算
C
B
HA=76.432m
A
三角高程测量高差计算表
测站点
目标点 觇 法
9.831 9.831
城市测量规范(CJJ8-99)
三角高程测量对向观
7.256 7.256 11.772 11.772 测,所得的高差之差不超
40 D 60 D
附和或环线 闭合差
20 D
30 D
40 D
mm mm
mm mm mm
─
经纬仪三角高程测量的主要技术要求
等级 一级 二级(图根) 仪器 DJ2 DJ6 竖直角测回数 (中丝法) 2 2 指标差 较差 ≤15 ″ ≤25 ″ 竖直角 测回差 ≤15 ″ ≤25 ″ 对向观测 高差较差 ±200S mm ±400S mm 附和或环线 闭合差
浅谈三角高程测量方法及精度分析
浅谈三角高程测量方法及精度分析摘要:传统的三角高程测量由于竖直角的观测精度不高,特别是受大气垂直折光的影响,使得它的应用受到限制。
近年来由于对大气折光问题的研究越来越深入,并且随着全站仪的广泛应用,三角高程测量引起国内外同行的高度重视,全站仪三角高程测量很快发展起来。
本文对全站仪三角高程测量的一般原理以及影对向法观测方案进行三角高程测量做了分析。
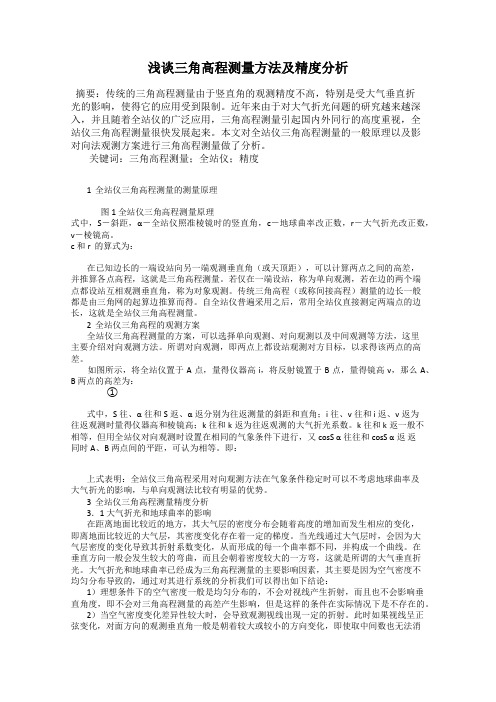
关键词:三角高程测量;全站仪;精度1 全站仪三角高程测量的测量原理图1 全站仪三角高程测量原理式中,S-斜距,α-全站仪照准棱镜时的竖直角,c-地球曲率改正数,r-大气折光改正数,v-棱镜高。
c 和r 的算式为:在已知边长的一端设站向另一端观测垂直角(或天顶距),可以计算两点之间的高差,并推算各点高程,这就是三角高程测量。
若仅在一端设站,称为单向观测,若在边的两个端点都设站互相观测垂直角,称为对象观测。
传统三角高程(或称间接高程)测量的边长一般都是由三角网的起算边推算而得。
自全站仪普遍采用之后,常用全站仪直接测定两端点的边长,这就是全站仪三角高程测量。
2 全站仪三角高程的观测方案全站仪三角高程测量的方案,可以选择单向观测、对向观测以及中间观测等方法,这里主要介绍对向观测方法。
所谓对向观测,即两点上都设站观测对方目标,以求得该两点的高差。
如图所示,将全站仪置于 A 点,量得仪器高 i,将反射镜置于 B 点,量得镜高 v,那么 A、B 两点的高差为:①式中,S往、α往和S返、α返分别为往返测量的斜距和直角;i往、v往和 i返、v返为往返观测时量得仪器高和棱镜高;k往和k返为往返观测的大气折光系数。
k往和k返一般不相等,但用全站仪对向观测时设置在相同的气象条件下进行,又cosS α往往和cosS α返返同时 A、B 两点间的平距,可认为相等。
即:上式表明:全站仪三角高程采用对向观测方法在气象条件稳定时可以不考虑地球曲率及大气折光的影响,与单向观测法比较有明显的优势。
全站仪三角高程测量的方法及对其精度分析 测量毕业论文
全站仪三角高程测量的方法及对其精度分析目录第一章、引言 (3)第二章、正文 (4)一、三角高程测量的原理及基本公式 (4)1.1 三角高程测量的原理 (4)1.2 三角高程测量的基本公式 (5)1.2.1基本公式 (5)1.2.2 距离的归算 (6)1.2.3 用椭球面上的边长计算单向观测高差的公式 (7)1.2.4 用高斯平面上的边长计算单向观测高差的公式 (7)1.2.5 对向观测计算高差的公式 (7)二、全站仪三角高程测量的方法 (8)2.1 传统方法 (8)2.2 使用跟踪杆配合全站仪测量高程 (9)三、三角高程测量的误差来源 (10)3.1 竖角的测角误差 (10)3.2 边长误差 (11)3.3 折射系数的误差 (11)3.4 仪器高i和目标高v的测定误差 (11)四、三角高程测量的精度分析 (12)4.1 观测高差中误差 (12)4.2 对向观测的高差中误差 (12)4.3 使用跟踪杆配合全站仪高程测量的高差中误差 (13)五、三角高程测量的应用 (13)5.1 三角高程路线 (14)5.2 独立高程点 (14)5.3 高程导线 (14)第六章、结论 (16)参考文献 (17)致谢 (17)附表1 (18)摘要:在工程施工过程中,常常涉及到高程测量。
普遍高程测量方法有水准测量和三角高程测量。
三角高程测量与水准测量相比,它施测速度快,不受地形起伏的限制,但是三角高程测量由于测量距离远,误差来源多,其精度受到影响,达不到高精度测量的要求。
随着高精度测距仪器的应用,三角高程测量的精度得到提高。
本文从三角高程测量的原理开始,探讨了全站仪三角高程测量的方法,以及对其进行精度分析。
因为快捷、简便,利用全站仪进行三角高程测量越来越受到施工测量人员的青睐。
Abstract:In the project construction process, involves frequently to the elevation survey.The universal elevation measuring technique has the leveling and the trigonometric leveling.The trigonometric leveling and the leveling compare, it executes measured the speed is quick, not hypsography limit, but trigonometric leveling because the survey is away from far, the error source are many, its precision comes under the influence, cannot achieve thehigh-accuracy survey the request. Along with the high accuracy range finder instrument application, the trigonometric leveling precision obtains the enhancement.This article from the trigonometric leveling principle start, has discussed the entire station meter trigonometric leveling method, as well as carries on the precision analysis to it. Because quickly, simple, uses the entire station meter to carry on the trigonometric leveling more and more to receive the construction survey crew's favor.关键词:全站仪三角高程测量误差来源精度分析Key word: Entire station meter Trigonometric leveling Error source precision analysis第一章、引言工程施工过程中,常常涉及到高程测量。
精密三角高程
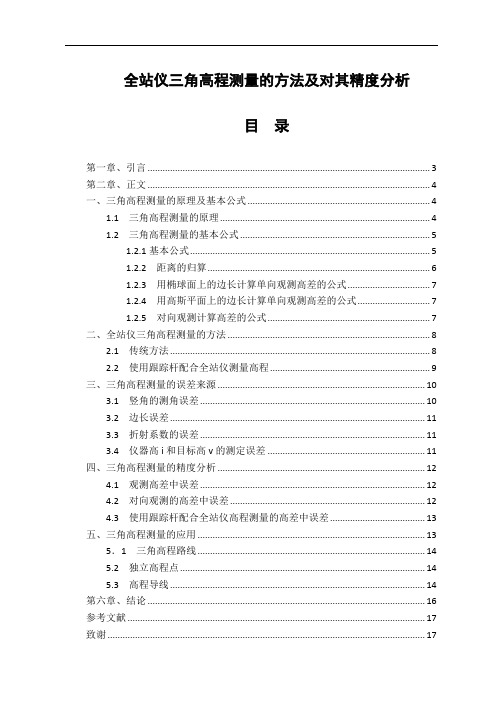
三角高程测量Trigonometric Leveling目录:1.三角高程测量原理、基本公式、误差分析 (1)1.1 单向观测计算高差的基本公式 (1)1.2 三角高程测量严密公式 (3)1.3 三角高程的精度估计公式 (6)1.3.1 单向观测高差的精度估算公式 (6)1.3.2 对向观测高差的精度估算公式 (6)1.3.3 理论结论 (8)2 垂线偏差与大气折光相关研究 (11)2.1垂线偏差 (11)2.1.1天文大地测量方法 (13)2.1.2 重力测量方法 (13)2.1.3 天文重力方法 (13)2.1.4 GPS测量方法 (14)2.2 大气折光系数的计算 (14)2.2.1实测法 (15)2.2.2 反演法 (15)2.3 削弱垂直折射的方法 (17)2.4 往返观测与近似对向观测试验(于雷) (19)1. 三角高程测量原理、基本公式、误差分析三角高程测量如下图所示:图1.1 三角高程测量原理若A 点的高程已知为A H ,则B 点高程为:v i S H h H H A AB A B -+⋅+=+=αtan (1.1)应用上式时要注意竖角α的正负号,当为仰角时取正,为俯角时取负号。
凡仪器设置在已知高程点,观测该点与未知高程点之间的高差称为直觇;反之,仪器设在未知高程点,测定该点与已知高程点之间的高差称为反觇。
1.1 单向观测计算高差的基本公式在三角高程测量基本公式1.1中,没有考虑地球曲率与大气折光对所测高差的影响。
在A 、B 两点相距较远时,则必须顾及地球曲率和大气折光的影响,二者对高差的影响称之为球气差。
如下图所示,设0S 为A 、B 两点间的实测水平距离,仪器置于A 点,仪器高度为i 。
B 点为照准点,觇标高度为v ,R 为参考椭球面上⌒''B A 的曲率半径。
⌒PE 、⌒AF 分别为过P 点和A 点的大地水准面。
PC 是⌒PE 在P 点的切线,⌒PN 为光程曲线。
8公路勘测中三角高程的精度分析

八、三角高程的精度分析在进行几何水准测量确有困难的山岳地带以及沼泽、水网地区,四等水准路线或支线,可用电磁波测距高程导线(以下简称高程导线)进行测量。
一、一般规定1、施测高程导线前,应沿路线选定测站,视线长度一般不大于700m,最长不得超过1km,视线垂直角不得超过15°,视线高度和离开障碍物的距离不得小于1.5m。
2、高程导线可布置为每一照准点安置仪器进行对向观测(以下简称每点设站)的路线;也可布置为每隔一照准点安置仪器(以下简称隔点设站)的路线。
隔点设站时,应采用单程双测法,即每站变换仪器高度或位置作两次观测,前后视线长度之差不得超过100m。
3、应在成像清晰、信号稳定时进行斜距和垂直角的观测,并遵守下列要求:a. 斜距观测两测回(每测回照准一次,读数四次),各次读数互差和测回中数之间的互差为10mm和15mm,每站需量取气温、气压值;b. 垂直角观测采用中丝法观测四个测回,测回差和指标差互差,均不得超过5″;c. 仪器高、觇牌高应在测前测后用经过检验的量杆各量测一次,两次互差不得超过2mm。
4、当水准点或其他高程点无法设置测站时,可用几何水准方法引测至合适的高程点后,再按高程导线施测。
对向观测高差之差应满足下式要求δ<0.1*S*10-8S:测距边斜距计算对向观测高差之差时应考虑球气差的影响。
球气差:当测距大于300米时,应考虑地球曲率和大气折光的合成影响,叫球气差C=0.43*D3/R二、大气折光系数K的确定提高三角高程测量精度的最大障碍是大气折光问题,由于大气折光受所在地区高程、气象、季节、时间等因素影响,K值难以精确确定,因此,在测量中,通常是根据当地观测条件取一平均值。
根据目前研究资料表明:K值在晴朗的白天取0.13-0.15;阴天的白天及夜间取0.16-0.20;晴朗的夜间取0.26-0.30为宜。
三、观测方法1、观测方法如图所示,A、B为两三角点,在A点安置仪器,在B点安置反射镜,量取仪器高和目标高。
全站仪中间法三角高程测量分析
2012年第29期(总第44期)科技视界Science &Technology VisionSCIENCE &TECHNOLOGY VISION 科技视界0引言确定地面点高程的测量工作,称为高程测量,按所使用的仪器和施测方法不同,高程测量方法主要有水准测量、三角高程测量、GPS 高程测量。
水准测量精度高,可用于任何等级的高程测量,但劳动强度大、进度慢。
全站仪三角高程测量受地形条件的限制少,具有测距精度高、测量速度快、适用范围广等特点,采用全站仪中间法三角高程测量,既可以避免量取仪器高和棱镜高所产生的误差,减少三角高程的误差来源,又有水准测量的任意设站的特点,灵活自由设站且不用对中,极大地提高了作业效率,在一定范围内可替代三四等水准测量。
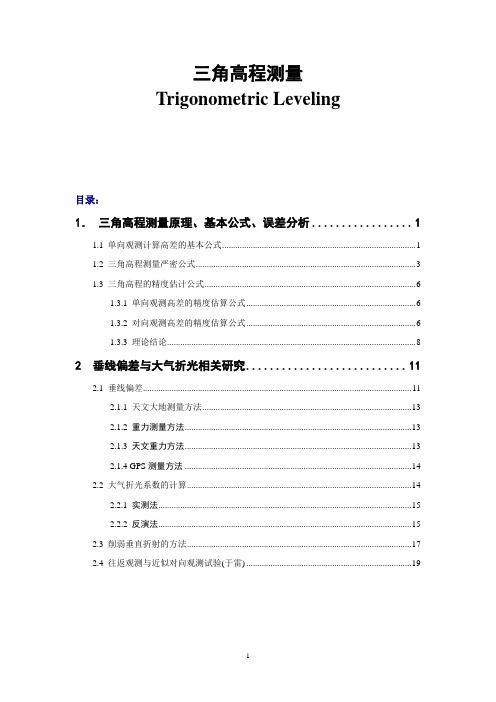
1三角高程测量的传统方法如图所示,设A,B 为地面上高度不同的两点。
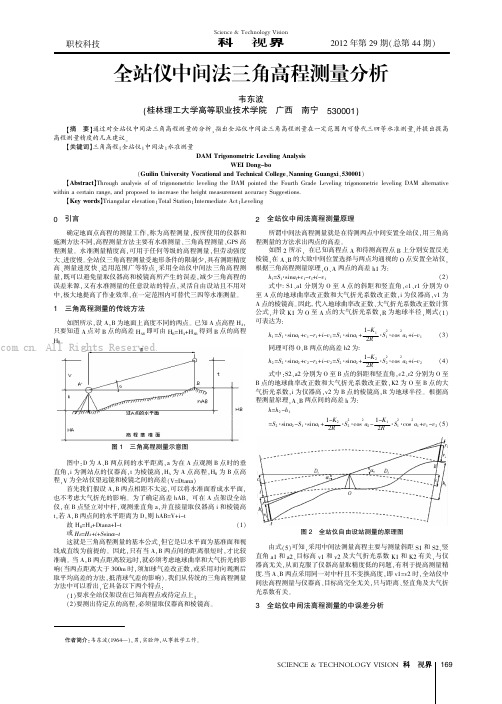
已知A 点高程H A ,只要知道A 点对B 点的高差H AB 即可由H B =H A +H AB 得到B 点的高程H B 。
图1三角高程测量示意图图中:D 为A、B 两点间的水平距离,а为在A 点观测B 点时的垂直角,i 为测站点的仪器高,t 为棱镜高,H A 为A 点高程,H B 为B 点高程,V 为全站仪望远镜和棱镜之间的高差(V=Dtanа)首先我们假设A,B 两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影响。
为了确定高差hAB,可在A 点架设全站仪,在B 点竖立对中杆,观测垂直角а,并直接量取仪器高i 和棱镜高t,若A,B 两点间的水平距离为D,则hAB=V+i-t故H B =H A +Dtanа+I-t (1)或H B =H A +i+S sin α-t这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A,B 两点间的距离很短时,才比较准确。
当A,B 两点距离较远时,就必须考虑地球曲率和大气折光的影响(当两点距离大于300m 时,须加球气差改正数,或采用对向观测后取平均高差的方法,抵消球气差的影响)。
三角高程测量原理与方法

三角高程测量原理与方法
三角高程测量是利用三角形相似原理进行高程测量的一种方法。
其原理是通过三角形内角和为180度,边长比例固定的特性,结合天文测量方法或地面测量方法,求得目标高程。
方法包括:
1. 天文测量法:利用天文仪器如经纬仪、水平仪等,测量目标点与天体(如恒星)的高度角,然后求解三角形的一边(即地面到目标点的距离),从而计算出目标点的高程。
2. 地面测量法:利用三角测量原理,通过测量三角形内角和边长比例,推算目标点高程。
其中,水准测量法是较为常用的一种方法。
首先设置一系列水准点,然后从基准点开始,采用望远镜或光电仪器,经过一系列测量,求得各水准点之间的高差,再通过计算,推算出目标点的高程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.4三角高程
2.4.1三角高程测量原理
1、原理
三角高程测量的基本思想是根据由测站向照准点所观测的垂直角(或天顶距)和它们之间的水平距离,计算测站点与照准点之间的高差。
这种方法简便灵活,受地形条件的限制较少,故适用于测定三角点的高程。
三角点的高程主要是作为各种比例尺测图的高程控制的一部分。
一般都是在一定密度的水准网控制下,用三角高程测量的方法测定三角点的高程。
如下图:
现在计划测量A、B间高差,在A点架设仪器,B点立标尺。
量取仪器高,使
望远镜瞄准B上一点M,它距B点的高度为目标高,测出水平和倾斜视线的夹角α,若A、B水平距离S已知,则:
注意:上式中α可根据仰角或俯角有正负值之分,当取仪器高=目标高时,计算就方便了。
在已知点架站测的高差叫直占、反之为反战。
2、地球曲率与大气对测量的影响
我们在水准测量中知道,高程的测量受地球曲率的影响,仪器架在中间可以消除,三角高程也能这样,但是对于一些独立交会点就不行了。
三角高程还受大气折射的影响。
如图:
加设A点的高程为,在A点架设仪器测量求出B点的高程。
如图可以得出
但如图有两个影响:
1)、地球曲率,在前面我们已经知道,地球曲率改正
2)、大气折射不易确定,一般测量中把折射曲线近似看作圆弧,其平均半径为地球半径的6~7倍,则:
,在这里r就是图上的f2。
通常,我们令
下面求,如图,在三角形中:
,当测量围在20km以,可以用S代替L,然后对公式做一适当的改正,进行计算。
2.4.2竖盘的构造及竖角的测定
1、竖盘构造
1)、构造
有竖盘指标水准管,如图:
竖盘与望远镜连在一起,转动望远镜是竖盘一起跟着转动;但是竖盘指标和指标水准管在一起,他们不动,只有调节竖盘水准管微动螺旋式才会移动。
通常让指标水准管气泡居中时进行读数。
竖盘自动归零装置
2)、竖盘的注记形式
主要有顺时针和逆时针
望远镜水平,读数为90度的倍数角度。
3)、竖角的表示形式
高度角a:目标视线与水平方向的夹角
天顶距z:目标视线与天顶距方向的夹角
2、竖角及测定
定义:竖直面目标方向与水平方向的夹角。
当进行竖直角的观测时,也要进行两个方向的观测,但是水平方向为90度的倍数,所以不用观测。
公式:
1)、当望远镜视线慢慢上倾时,竖盘读数逐渐增加,则竖角α=瞄准目标的读数-视线水平时的读数。
2)、当望远镜视线慢慢上倾时,竖盘读数逐渐减小,则竖角α=视线水平时的读数-瞄准目标时的读数。
如图
总的读数应该是:
3、指标差的计算、检验与校正
1)、竖盘指标差
定义:由于从准确位置偏移,使视线水平时的数值大了或小了一个数值,称这个偏移值为指标差。
通常用x表示。
指标差偏移与竖盘注记方向一致,使读数增大了一个x值,令x为正,反之x为负。
实例说明:
如上面的图,盘左计算的竖直角应为:
同样,盘右计算的竖直角应为:
两式求平均值,得
从上面可以看出,用盘左、盘右测两次,竖角不受指标差影响,将两式相减得指标差计算公式:
2)、指标差的检验和校正
检验:
在一起整平后,用盘左和盘右两个位置瞄准同一明显目标,读取竖盘读数R和L,读数时,竖盘水准管气泡务必居中。
用公式计算出x的数值,若超过一定的限值,则要进行校正。
一般还要观测另一明显目标,若两次计算的x值变化甚微或没有变化,证明观测读数无误,于是进行校正。
校正:
校正时即在当时望远镜的位置进行,不动望远镜,找准原目标,若这时为盘右位置,x为已知,真确的读数应该为。
用竖盘指标水准管微动螺旋使竖盘读数为R-x,这时用校正螺丝钉使气泡居中。
然后观测另一目标,若x接近0,可以不校正;若x值还很大,则继续校正,直到达到目的为止。
4、单指标竖盘偏心问题
概念:竖盘的分划中心应该与其旋转轴重合,但是制造、安装和检修后没有使两个中心重合,这就称为竖盘偏心。
1)、公式推导
由于对同一目标,竖盘的盘左、盘右读数相差并非为180度,所以单指标经纬仪竖盘读数中的偏心误差不能用平均值消除,有必要加以分析和讨论。
和水平一样,竖盘对偏心的读数影响
式中:L’、R’是带有偏心误差的实际读数,e为偏心距,r为度盘分划半径。
所以我们可以计算出测得竖直角为
,即:
有因为:,所以,我们可以计算出竖直角和指标差x分别为:
2)、竖直角误差和指标差误差
由上面公式可知,竖直角误差和指标差误差公式为:
通常,对于一台仪器而言,r是定值,在一段时间e和θ也很少变化,所以上面公式可以变为:
3)、竖直角误差和指标差误差的变化
的变化:
α’的影响:当α’逐渐增大,就变小。
在实际测量中α’不超过10度,只有竖盘存在偏心,竖角的精度就有影响,特别是平原地区,α’较小,更应该注意。
偏心方向和θ大小的影响:θ为90度或270度时不存在影响。
的变化:
当α’=0度时,偏心对水平视线不产生指标差误差,所有当竖直角小时,由偏心引起的指标差误差很小,检验指标差时一视线水平为好。
当θ=0或180度时,不产生指标差误差,但是原来的指标差x依然存在。
4)、竖直角误差对高差的影响
若在A、B两点相对观测竖角,且v=i,则当竖盘偏心时:
往返角就其绝对值而言,一个少了个改正项,一个多了个改正项,利用求平均值可以消除偏心误差对高差的影响。
5)、偏心误差系数的测定
由上面找到,往返和复站三角高程可以消除偏心误差影响,而对于单站的只能通过偏心误差的改正系数对测量结果加一改正。
方法:先用往返测求出倾斜角,R然后测出,然后求出:
其中x没有受到偏心影响的指标差可以在α’为0时求得
然后根据上式可以求出偏心元素e和θ。
2.4.3数据处理
1、三角高程的计算
2、误差的来源分析
3、三角高程测量的精度
2.4.4三角高程的应用
在地形控制测量和航测外业控制测量工作中主要应用三角高程测量方法测定一系列高程控制点。
通常有下列三种形式。
1、三角高程路线
所谓三角路线法实在两个已知高程点间由已知水平距离的若干边组成的路线,用三角高程的方法,对每条边往返向测定高差。
可用于工程导线和三角网。
提前要设计好传递高程的路线,要求竖角较小和边长较短的边组成。
每条边必须往返测,最后和水准一样分配闭合差。
2、独立高程点
由已知二、三个高程点求一个未知点,用三角高程的方法。
水平距离已知,若各已知点求得未知点高程差别超过围,必须重测。
3、高程导线
采用导线的形式联测个点高程,距离用视距测量求得。
高程导线可以分为符合导线、闭合导线和支导线(距离较短)。
通常对符合与闭合导线可以用割点设站,就是单向测定个边高程,称为单站导线。
对支导线必须用复站导线。
4、光电测距三角测量
采用高程导线的施测形式而用光电测距仪测量距离来处理地面点高程的方式光电测距仪三角高程测量。
由于光电测距仪精度高,可以代替四等水准。