一种基于OpenCV实现的三帧差分运动目标检测算法研究
基于OpenCV的运动目标检测与跟踪的开题报告

基于OpenCV的运动目标检测与跟踪的开题报告1.问题描述动态目标检测与跟踪是计算机视觉领域的重要研究方向之一,其应用范围涉及视频监控、智能交通、人机交互等领域。
然而,传统方法对于场景复杂、目标运动快速、遮挡等情况处理效果不佳,需要更高精度、更高效率的算法解决这些问题。
2.研究目标本研究拟使用OpenCV库,运用图像处理、计算机视觉、机器学习等方法,实现运动目标的检测与跟踪,达到以下目标:(1)快速准确地检测运动目标,识别目标的运动轨迹;(2)针对遮挡、光照变化等问题,采用定位、成像、跟踪等多种策略,提高目标检测的精度;(3)针对运动目标的运动速度、方向等多种属性,进行多角度、综合性的分析和研究,建立适用于实际应用的算法。
3.研究方法和技术路线(1)建立视频采集平台。
使用摄像机获取实时视频流,并对数据进行采集、预处理,并应用OpenCV库实现视频流后处理。
(2)建立运动目标检测算法。
运用图像处理算法进行前景/背景分类、形态学滤波等操作,采用一系列特征提取的方法刻画像素点的特征,采用分类器实现目标检测。
(3)针对复杂场景、遮挡等问题,采用多特征、多分类器等方法进行重新整合,进一步提高算法准确度。
(4)建立运动目标跟踪算法。
根据检测结果,利用卡尔曼滤波、粒子滤波等跟踪方法对运动目标进行跟踪。
(5)建立性能评估体系,基于指标和实际应用场景对所研发算法进行综合性评估。
4.预期结果基于OpenCV库进行运动目标检测与跟踪,在实验室实现的基础上,进行测试、优化,结合现有开源算法,最终达到高精度、高效率的运动目标检测与跟踪效果,具体评估指标包括精度、召回率、信噪比等。
同时,根据实际应用场景,通过算法参数的调整,进一步将算法实现优化,使其适用于各种应用场景。
一种基于OpenCV实现的三帧差分运动目标检测算法研究
K y W o d t r ef medf rn i , eet n o vn be t Op n V e r s h e-r i ee t l d tci f a f a o mo ig o jc , e C
Cls mb r TP 0 . a s Nu e 3】6
1 引言
现实 生活 中, 量有 意义 的视 觉 信息 都 包 括在 大 运 动之 中 。尽 管 人类 的 视 觉 即 能看 见 运 动物 体 又 能看 到静 止 的物 体 , 是 在 许 多 场 合 , 但 比如 重 要 场
t n S me smu a i n t s sa e c r id O t b h l o ih a d t e b sc fa i e e c t o i . o i lt e t r a re u y t e a g rt m n h a i r me d f r n e me h d,r s e t e y o o f e p c i l ,mo 的基础 , 取 准确 的 获 运 动 目标对 于 后 面 的处 理具 有 重 要 意 义 , 此 , 因 研
徐 卫星 王 兰英 李 秀娟
郑州 400) 5 O 7 ( 河南工业大学 电气工程学院
摘
要
运 动 目标检测在视觉监控系统 、 医学 图像 分析 、 工业检测 和军事等领域 有着广泛 的应用 。运动 目标 检测处于
这些应 用的最前端 , 检测结果 的准确 精度 对后 续处理 有很 大 的影 响 。文 中提 出 了一 种三帧 差分运 动 目标 检测算 法 , 利用
总第 2 5 6 期 2 1 年第 1 期 01 1
opencv运动检测三帧差法

opencv运动检测三帧差法三帧差法优点:实时性高缺点:1、运动物体本身颜色相近时,会出现较大的空洞。
2、无法应对光照骤变的情况理论上:三帧差法比二帧差法更好一些(可在一定程度上消除帧间差分法的“双影”现象),但是也要结合实际情况而用。
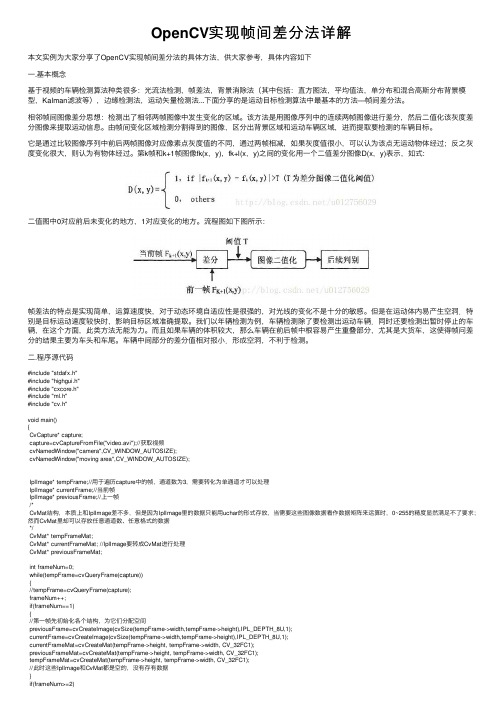
1. 帧差法基本原理帧差法的实现非常简单:如图可见,由目标运动引起的运动变化区域,包括运动目标在前后两帧中的共同位置(图中黑色区域)、在当前帧中新显露出的背景区域和新覆盖的背景区域三部分。
数学原理:三帧差法的流程:1 结果1 = (第二幅图像 - 第一幅图像) ∩ (第三幅图像 - 第二幅图像)2结果2 = 滤波(结果1)3 结果3 = 形态学处理(结果2)4结果4 = 二值化(结果3)第一步:第二幅图像减去第一幅图像的值与第三幅图像减去第二幅图像的值作交集运算.对第一步产生的结果做滤波处理.对第二步产生的结果做形态学处理.对第三步产生的结果做二值化处理.直接上代码:1.#include <opencv2/opencv.hpp>ing namespace std;ing namespace cv;4.5.int main()6.{7.//读入视频8.VideoCapture capture("1.avi"); //Laboratory_raw.avi9.//VideoCapture capture(0);10.11.Mat tempframe, currentframe, previousframe, difframe,s3;12.Mat difframe2, difframe3;13.Mat frame;14.int framenum = 0;15.//读取一帧处理16.while (true)17.{18.if (!capture.isOpened())19.{20.cout << "read video failure" << endl;21.return -1;22.}23.//tempframe = capture.read(frame);24.capture >> frame;25.imshow("原视频", frame);26.previousframe = frame.clone(); //第一帧27.28.capture >> frame;29.currentframe = frame.clone(); //第二帧30.31.capture >> frame;32.s3 = frame.clone(); //第三帧33.34.cvtColor(previousframe, previousframe, CV_BGR2GRAY);35.cvtColor(currentframe, currentframe, CV_BGR2GRAY);36.cvtColor(s3,s3, CV_BGR2GRAY);37.38.39.absdiff(currentframe, previousframe, difframe);//做差求绝对值 1-240.absdiff(previousframe, s3, difframe2);//做差求绝对值 2-341.42.43.//准备做与运算,difframe3= difframe2^difframe44.// void bitwise_and(InputArray src1, InputArray src2,OutputArray dst, InputArray mask=noArray());//dst = src1 & src245.bitwise_and(difframe, difframe2, difframe3); //46.47.48.threshold(difframe3, tempframe, 20, 255.0, CV_THRESH_BINARY);49.dilate(tempframe, tempframe, Mat());//膨胀50.erode(tempframe, tempframe, Mat());//腐蚀51.52.imshow("运动目标", tempframe);53.54.waitKey(50);55.}//end while56.}运行结果:希望对你有帮助。
【目标追踪】三帧差法原理及实现

【目标追踪】三帧差法原理及实现三帧差法原理及实现•(一)帧差法原理及实现:•(二)帧差法存在的问题:•(三)三帧差法的原理:•(四)三帧差法的实现代码:•(五)视频中的目标追踪效果:(一)帧差法原理及实现:这里可以看一下我的这篇博客,这里就不赘述了:【目标追踪】python帧差法原理及其实现(二)帧差法存在的问题:运动物体本身颜色相近时,会出现较大的空洞。
位置变化缓慢时,难以检测到目标。
对光线非常敏感。
(三)三帧差法的原理:三帧差法的关键是,不再仅仅采用相邻的两帧图片作差查找运动目标,而是在相邻三帧图片的两张帧差图中取“与”操作,即:(四)三帧差法的实现代码:(具体处理和代码解析还是推荐看一下我的上一篇博客:【目标追踪】python帧差法原理及其实现)代码:import cv2import numpy as npfrom nms import py_cpu_nmsfrom time import sleepclass Detector(object):def __init__(self, name='my_video', frame_num=10, k_size=7, color=(0, 255, 0)): = nameself.color = colorself.nms_threshold = 0.3self.time = 1/frame_num # 频率self.es = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (k_size, k_size))def catch_video(self, video_index=0, k_size=7,iterations=3, threshold=20, bias_num=1,min_area=360, show_test=True, nms=True,logical='or'):# video_index:摄像头索引(数字)或者视频路径(字符路径)# k_size:中值滤波的滤波器大小# iteration:腐蚀+膨胀的次数,0表示不进行腐蚀和膨胀操作# threshold:二值化阙值# bias_num:计算帧差图时的帧数差# min_area:目标的最小面积# show_test:是否显示二值化图片# nms:是否进行非极大值抑制# logical:三帧差取or或andlogical = logical.lower()if not bias_num > 0:raise Exception('bias_num must > 0')if isinstance(video_index, str):is_camera = False# 如果是视频,则需要调整帧率else:is_camera = Truecap = cv2.VideoCapture(video_index) # 创建摄像头识别类if not cap.isOpened():# 如果没有检测到摄像头,报错raise Exception('Check if the camera is on.')frame_num = 0previous = []while cap.isOpened():catch, frame = cap.read() # 读取每一帧图片if not catch:raise Exception('Unexpected Error.')if frame_num < bias_num:value = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) previous = [value]*bias_numframe_num += 1raw = frame.copy()gray1 = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)gray1 = cv2.absdiff(gray1, previous[0])gray1 = cv2.medianBlur(gray1, k_size)_, mask1 = cv2.threshold(gray1, threshold, 255, cv2.THRESH_BINARY)gray2 = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)gray2 = cv2.absdiff(gray2, previous[1])gray2 = cv2.medianBlur(gray2, k_size)_, mask2 = cv2.threshold(gray2, threshold, 255, cv2.THRESH_BINARY)if logical == 'or':mask = (np.logical_or(mask1, mask2) + 0)elif logical == 'and':mask = (np.logical_and(mask1, mask2) + 0)else:raise Exception('Logical must be \'OR\' or \'AND\'')mask = (mask * 255).astype(np.uint8)mask = cv2.dilate(mask, self.es, iterations)mask = cv2.erode(mask, self.es, iterations)_, cnts, _ = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)bounds = self.nms_cnts(cnts, mask, min_area, nms=nms)for b in bounds:x, y, w, h = bthickness = (w*h)//min_areathickness = thickness if thickness <= 3 else 3thickness = thickness if thickness >= 1 else 1cv2.rectangle(frame, (x, y), (x+w, y+h), self.color, thickness) if not is_camera:sleep(self.time)cv2.imshow(, frame) # 在window上显示图片if show_test:cv2.imshow(+'_frame', mask) # 边界value = cv2.cvtColor(raw, cv2.COLOR_BGR2GRAY)previous = self.pop(previous, value)cv2.waitKey(10)if cv2.getWindowProperty(, cv2.WND_PROP_AUTOSIZE) < 1:# 点x退出breakif show_test and cv2.getWindowProperty(+'_frame', cv2.WND_PROP_AUTOSIZE) < 1:# 点x退出break# 释放摄像头cap.release()cv2.destroyAllWindows()def nms_cnts(self, cnts, mask, min_area, nms=True):# 对检测到的边界框使用非极大值抑制bounds = [cv2.boundingRect(c) for c in cnts if cv2.contourArea(c) > min_area]if len(bounds) == 0:return []if not nms:return boundsscores = [self.calculate(b, mask) for b in bounds]bounds = np.array(bounds)scores = np.expand_dims(np.array(scores), axis=-1)keep = py_cpu_nms(np.hstack([bounds, scores]), self.nms_threshold)return bounds[keep]def calculate(self, bound, mask):x, y, w, h = boundarea = mask[y:y+h, x:x+w]pos = area > 0pos = pos.astype(np.float)# 得分应与检测框大小也有关系score = np.sum(pos)/(w*h)return scoredef pop(self, l, value):l.pop(0)l.append(value)return lif __name__ == "__main__":detector = Detector(name='test')detector.catch_video('./test.avi', bias_num=2, iterations=1,k_size=5, show_test=True, min_area=360, nms=False) (五)视频中的目标追踪效果:。
OpenCV实现帧间差分法详解
OpenCV实现帧间差分法详解本⽂实例为⼤家分享了OpenCV实现帧间差分法的具体⽅法,供⼤家参考,具体内容如下⼀.基本概念基于视频的车辆检测算法种类很多:光流法检测,帧差法,背景消除法(其中包括:直⽅图法,平均值法,单分布和混合⾼斯分布背景模型,Kalman滤波等),边缘检测法,运动⽮量检测法...下⾯分享的是运动⽬标检测算法中最基本的⽅法—帧间差分法。
相邻帧间图像差分思想:检测出了相邻两帧图像中发⽣变化的区域。
该⽅法是⽤图像序列中的连续两帧图像进⾏差分,然后⼆值化该灰度差分图像来提取运动信息。
由帧间变化区域检测分割得到的图像,区分出背景区域和运动车辆区域,进⽽提取要检测的车辆⽬标。
它是通过⽐较图像序列中前后两帧图像对应像素点灰度值的不同,通过两帧相减,如果灰度值很⼩,可以认为该点⽆运动物体经过;反之灰度变化很⼤,则认为有物体经过。
第k帧和k+1帧图像fk(x,y),fk+l(x,y)之间的变化⽤⼀个⼆值差分图像D(x,y)表⽰,如式:⼆值图中0对应前后未变化的地⽅,1对应变化的地⽅。
流程图如下图所⽰:帧差法的特点是实现简单,运算速度快,对于动态环境⾃适应性是很强的,对光线的变化不是⼗分的敏感。
但是在运动体内易产⽣空洞.特别是⽬标运动速度较快时,影响⽬标区域准确提取。
我们以年辆检测为例,车辆检测除了要检测出运动车辆.同时还要检测出暂时停⽌的车辆,在这个⽅⾯,此类⽅法⽆能为⼒。
⽽且如果车辆的体积较⼤,那么车辆在前后帧中根容易产⽣重叠部分,尤其是⼤货车,这使得帧问差分的结果主要为车头和车尾。
车辆中间部分的差分值相对报⼩.形成空洞,不利于检测。
⼆.程序源代码#include "stdafx.h"#include "highgui.h"#include "cxcore.h"#include "ml.h"#include "cv.h"void main(){CvCapture* capture;capture=cvCaptureFromFile("video.avi");//获取视频cvNamedWindow("camera",CV_WINDOW_AUTOSIZE);cvNamedWindow("moving area",CV_WINDOW_AUTOSIZE);IplImage* tempFrame;//⽤于遍历capture中的帧,通道数为3,需要转化为单通道才可以处理IplImage* currentFrame;//当前帧IplImage* previousFrame;//上⼀帧/*CvMat结构,本质上和IplImage差不多,但是因为IplImage⾥的数据只能⽤uchar的形式存放,当需要这些图像数据看作数据矩阵来运算时,0~255的精度显然满⾜不了要求;然⽽CvMat⾥却可以存放任意通道数、任意格式的数据*/CvMat* tempFrameMat;CvMat* currentFrameMat; //IplImage要转成CvMat进⾏处理CvMat* previousFrameMat;int frameNum=0;while(tempFrame=cvQueryFrame(capture)){//tempFrame=cvQueryFrame(capture);frameNum++;if(frameNum==1){//第⼀帧先初始化各个结构,为它们分配空间previousFrame=cvCreateImage(cvSize(tempFrame->width,tempFrame->height),IPL_DEPTH_8U,1);currentFrame=cvCreateImage(cvSize(tempFrame->width,tempFrame->height),IPL_DEPTH_8U,1);currentFrameMat=cvCreateMat(tempFrame->height, tempFrame->width, CV_32FC1);previousFrameMat=cvCreateMat(tempFrame->height, tempFrame->width, CV_32FC1);tempFrameMat=cvCreateMat(tempFrame->height, tempFrame->width, CV_32FC1);//此时这些IplImage和CvMat都是空的,没有存有数据}if(frameNum>=2){cvCvtColor(tempFrame, currentFrame, CV_BGR2GRAY);//转化为单通道灰度图,此时currentFrame已经存了tempFrame的内容 /*⽤cvConvert将IplImage转为CvMat,接下来⽤cvAbsDiff对它们处理经过转换后,currentFrame没有改变,但是tempFrameMat已经存了currentFrame的内容*/cvConvert(currentFrame,tempFrameMat);cvConvert(previousFrame,previousFrameMat);cvAbsDiff(tempFrameMat,previousFrameMat,currentFrameMat);//做差求绝对值/*在currentFrameMat中找⼤于20(阈值)的像素点,把currentFrame中对应的点设为255此处阈值可以帮助把车辆的阴影消除掉*/cvThreshold(currentFrameMat,currentFrame,20,255.0,CV_THRESH_BINARY);//cvConvert(currentFrameMat,currentFrame); //观察不⼆值化的情况cvDilate(currentFrame,currentFrame); //膨胀cvErode(currentFrame,currentFrame); //腐蚀cvFlip(currentFrame, NULL, 0); //垂直翻转//显⽰图像cvShowImage("camera",tempFrame);cvShowImage("moving area",currentFrame);}//把当前帧保存作为下⼀次处理的前⼀帧cvCvtColor(tempFrame, previousFrame, CV_BGR2GRAY);cvWaitKey(33);}//end while//释放资源cvReleaseImage(&tempFrame);cvReleaseImage(&previousFrame);cvReleaseImage(¤tFrame);cvReleaseCapture(&capture);cvReleaseMat(&previousFrameMat);cvReleaseMat(¤tFrameMat);cvDestroyWindow("camera");cvDestroyWindow("moving area");}【注意】代码复制他处,略有改动,进⾏视频输出矫正(源代码昰倒的图像)。
基于OpenCV的运动目标跟踪系统研究
电 子 测
试
ELECT R0NI TEST C
A u 201 g. 0 No. 8
基 于 op n V的运 动 目标 跟 踪 系 统 研 究 ec
吴 永 浩 ,华 云松 , 尚 亮
( 上海理工大学 光 电信息 与计算机工程学院 ,上海 2 09 ) 000
ba e s d on he O pe t nCV
W u Y o ha H uaYun on ng o, s g,S ng L a ha ing
( iesyo h n h i o ce c n c n lg sh o f pia— lcr a a dc mp tr n ie r g s a g a 0 0 0 Unv ri f a g a fr S in ea dTeh oo y c o l t l E et c l n o ue gn e n h n h i 0 9 ) t S oo c i e i 2
中确定运动 目标 ,对感 兴趣 目标 的检 测 、提 取 。使
用运动 目标 检测技术 ,可 在摄 像机监视场景 范围内 , 对 出现 的运动 目标进行 检测 、分类 、跟踪 等 ,可应 用于各种 监控 目的 ,如周 界警戒及入侵检测 、绊 线 检测 、非法停 车车辆检测 等。正是 由于其广泛 的应 用前景和显 著的优点 ,研究运 动 目标检测 、跟踪 系
摘 要 :本文分析 比较 了传 统运 动 目标检测的3 主要方法 :背景图像差分法 、时态差分 法和光流法 ,在此基 种 础上给出了一种 背景 图像预测算法 ,大大减少 了因为背景变化而 产生的 目标检 测误差 。本文 基于Op n 设 e CV 计出改进的运动 目标 检测与跟踪 算法 ,实现 了运 动 目标 的跟踪 ,并在Vc+ 编译环境下 ,利用us 摄 像头作 + B 为视频采集器 ,通过观察 实验 结果可以看 出,本 文的运动 目标检测算法 能够 正确地检测 出视频 图像中的运动 目标 ,而且在检测性能上优于普通的 自适应背景差分法 。
基于OpenCV的视频图像序列的运动目标检测

0 引言
于背景图像的动态变化 ,如天气 、光照 等的影响,使得运 随着 多媒体 技术 的发 展和 计算机 性能 的提高 ,计 算 机视觉 的研究重点 已经从静态图像过渡到动态图像序列上
面,其 中运动 目标检测与跟踪是其 中—个主要分支 ,这方 动检测成为一项相 当困难 的工作。 目前几种常 用的方法有 :
=
3 光流法
光流 计算方法最初 是 由 H m和 Sh nk 18 年提 o cu c 于 9 1
出的 , 是一种以灰度梯度基本不变或 亮度恒定的约束假 它
设为基础的 目标检测的有效方法。
1 二 l 0 一 <T l
一
1
㈩ () 1
设 IxYt (, , )为t 刻 点 (, 时 )的 灰 度; Ix xY+△ ,+A ) +A 时刻运动到点 ( +A , t t 为t t
2 " 年 7. o / g 第 7期
电 子 测 试
ELEc7 1 NI TEsT F0 c
Ju| 2o” No. 7
基于O eC
刘维杰 , 志剑 ,马铁 华 粱 ( 中北大学 电子测试技术重 点实验 室 山西 太原 005 ) 30 1
( +A , ) xY+ 的灰度值,理论上两个灰度值相等,
将该等式右边在( , ,) Y 点用泰勒公式展开,经化简和略
去二次项和余式得 :
C 由 o 二值图像 D ) 更新背景图像 Bf 即 ,
:
H
譬 …
式中B (, 为背景图像 ; 为二值图像 ; f ) X Df I为第
[ 郭雷 ,李 晖晖 ,鲍永 生 . 1 ] 图像融合 [ . M]北京 : 电子
工业 出版 社 ,20 . 08
视频监控系统中一种运动目标的检测方法
运动 目标的检测是指从 序列 图像 中将运动 目标从背 究在背景静止情 况下 的目标检测。
景 图像 中分割出来 。运动 目标 的检测 和跟踪是计 算机视 觉研究的主要问题之一 , 它融合 了 自动控制 、 图像处理 、 模
1 运 动 目标 的检 测 技 术
运动 目标 的检 测过 程包 括运 动 目标检测 的 预处理 、
( 台大 学 , 东 烟 台 240 ) 烟 山 60 5
【 摘 要】提 出了一种基于 改进 的背景 差分 法 的运 动 目标检 测 和识 别 的方 法 , 该算 法用 于 视 频监 控 系统 中运 动 目 检 测和 报 标 警 。双 阈值 法和 动态阈值法 有效地检测 出图像 中的运动 目标 。Mal . t b70中对 算法进 行 了仿真 , 验表 明, 方 法有 效去 除 了 a 实 该 运 动 目标 阴影及 背景噪声 , 可准确地 检测 出运 动 目标 。 【 关键词】视频监控; 背景差分法; 运动 目 标检测; 迭代法 【 中图分类号】T 998T 314 N 1. ;P9.1 【 文献标 识码 】A
邕雷 目酗目
a 平 均 法 b 改 进 法 c处 理 后 的 图像
稳健 I也 不好 。另一种 常见 的方法 就是对一 段时 间 内的 生
图 2 平 均 法 与 改进 法 的 比较
视 频图像 用累加求 平均值 的方法获得 背景 图像 。此方法 14 背景图像的更新 . 虽 然计算 简单 , 是很容 易 把前 景 目标 混 入到 背景 图像 但 监控视频 中的背景并 不是一成 不变 的。最 常见 的影
景 图像 的质量 。
中的新增物体当成运 动物体检测 出来 , 或者是在运动实体
内部容易产生空洞现象 , 以背景 图像需要更新 - 。 所 - , 常用 的背景 图像 更新 方法 是 : 隔一 段 时 间提取 新 每 的背景 图像 , 新取 的图像可 以是连续帧的视频图像的平均 值, 新取图像 与之前 的背景 图像 按照 一定 的 比例综 合 , 就
《2024年基于OPENCV的运动目标检测与跟踪技术研究》范文
《基于OPENCV的运动目标检测与跟踪技术研究》篇一一、引言随着计算机视觉技术的飞速发展,运动目标检测与跟踪技术已经成为计算机视觉领域研究的热点。
该技术广泛应用于智能监控、交通流量管理、人机交互等众多领域。
OpenCV作为一个强大的计算机视觉库,为运动目标检测与跟踪提供了有效的工具。
本文旨在研究基于OpenCV的运动目标检测与跟踪技术,探讨其原理、方法及实际应用。
二、运动目标检测技术研究1. 背景及原理运动目标检测是计算机视觉中的一项基本任务,其目的是从视频序列中提取出运动的目标。
OpenCV提供了多种运动目标检测方法,如背景减除法、光流法、帧间差分法等。
其中,背景减除法是一种常用的方法,其原理是将当前帧与背景模型进行比较,从而检测出运动目标。
2. 关键技术与方法(1)背景建模:背景建模是运动目标检测的关键步骤。
OpenCV提供了多种背景建模方法,如单高斯模型、混合高斯模型等。
其中,混合高斯模型能够更好地适应背景的动态变化。
(2)阈值设定:设定合适的阈值是运动目标检测的重要环节。
阈值过低可能导致误检,阈值过高则可能导致漏检。
OpenCV通过统计像素值分布,自动设定阈值,从而提高检测的准确性。
3. 实验与分析本文通过实验对比了不同背景建模方法和阈值设定对运动目标检测效果的影响。
实验结果表明,混合高斯模型结合合适的阈值设定能够获得较好的检测效果。
此外,本文还对不同场景下的运动目标检测进行了实验,验证了该方法的稳定性和泛化能力。
三、运动目标跟踪技术研究1. 背景及原理运动目标跟踪是指在视频序列中,对检测到的运动目标进行持续跟踪。
OpenCV提供了多种跟踪方法,如光流法、Meanshift 算法、KCF算法等。
这些方法各有优缺点,适用于不同的场景和需求。
2. 关键技术与方法(1)特征提取:特征提取是运动目标跟踪的关键步骤。
OpenCV可以通过提取目标的颜色、形状、纹理等特征,实现稳定的目标跟踪。
此外,还可以采用深度学习等方法,提取更高级的特征,提高跟踪的准确性。
运动目标检测的三帧差分和背景消减研究

( xi , xj, tk+1 )|
( 3) 分别 对 g( xi, xj, tk ) 和 g(xi, xj , t k+1) 进行 中值滤波 , 得到 ng( xi , xj,
tk) 和 ng(xi, xj , tk+1) , n 的大小可取估计目标的尺寸。
( 4) 对灰度图像 ng( xi, xj, tk) 和 ng( xi , xj, tk+1 ) 进行自动门 限分割, 得 到 二 值 图 像 b( xi, xj, tk) 和 b( xi , xj, tk+1) 。
2.4 三帧差分法的算法描述
( 1) 序列 图像处理用来确 定图像序列中 有无物体运动、解决低信 噪 比 条 件 下 的 运 动 小 目 标 检 测 问 题 的 较好 方 法 。通 过 采 集 设 备 实 时 从 外界环 境里获取运动 彩色图像,其颜 色种类多, 不利于 图像处理, 因此
要把彩色图转换为灰度图, 其灰度值和 RGB 颜色对应关系 如下:gray=
( a)
式中( xi , xj) 表示单帧图像中每个像素的位置坐标。连续三帧序列
原始 图像 f( xi , xj, tk) , f(xi, xj , tk+1) , f( xi , xj, tk+2) , 相邻 两帧的 绝对 差灰度
图 像 : g (xi, xj , t k) =| f( xi, xj, tk+1 ) - f( xi , xj, tk) | 和 g(xi, xj, tk+1) =|f( xi, xj , tk +2) - f
Th 定义在 3 倍 d(x,y)方差处。通过这样的图 像分割过程, 得到 目标和
背景的二值图像。
一种基于空间信息的运动目标检测方法

a oi m bsdo ho t i n ne s y 。C l rh ae n crma c ya d it i ) I g t it nt
模 型 的参数更 新 方法来 减 少计 算 的复杂 度 。文 献 [ ] 对 颜色 空 间 的改变 提 出一 种 色度 坐 标 的模 5针 型 。然 而上述 方 法 在 光 照 突 变 的情 况下 , 将 光 会 照变 化 的像 素判 断 为 前 景 目标 , 出现 大 面 积 的误
背景的概率 , 而忽略了像素及其邻域之间的内在 联系。这样不仅计算量大 , 而且对光照突变 的情 况 , 难 正确 检测 出运 动 目标 。 很
标实时准确检测 。
关键词 : 背景减 除 ; 运动 目标检测 ; 空间信息 ;区域建模
中图分类号 :P 9 T 31 D I1 .9 3 ji n 10 O :0 3 6/.s .07—14 2 1 .3 06 s 4 X.0 0 .0 1
视频图像处理 中运动 目标检测的 目的是找到 产生运动 的区域 ( 、 人 车等 ) 检测 出的运动 区域 , 是 后 续跟 踪和 行 为分析 等视 频 图像处 理模 块感 兴
些方法都取得了较好的结果 ; 文献 [1 利用像素 1] 及其邻域角度的关系检测运动 目 。笔者针对光 标 照的突变情况 , 利用像素及其 区域的颜色角度 、 模 值差分等信息 , 确定动态变化场景 中的运动区域 , 克服光 照 的突变 引起 的误 判 现象 。该方 法 消耗 的
内存空 间 小 , 够应 用 于实 时的检 测 系统 中。 能
三帧差分法

三帧差分法基于OpenCV实现的三帧差分法代码基于帧间差分法进行升级的三帧差分法,不同的测试视频可以设置不同二值化阈值来增强效果。
根据实际情况进行形态学处理。
[cpp] view plain copy1. #include <opencv2/highgui/highgui.hpp>2. #include<opencv2/imgproc/imgproc.hpp> 3. #include <opencv2/core/core.hpp>4.5. #define threshold_diff1 25 //设置简单帧差法阈值6. #define threshold_diff2 25 //设置简单帧差法阈值7.8. using namespace cv;9. using namespace std;10.11. int main(int argc,unsigned char* argv[]) 12. {13. Mat img_src1,img_src2,img_src3;//3帧法需要3帧图片 14. Mat img_dst,gray1,gray2,gray3;15. Mat gray_diff1,gray_diff2;//存储2次相减的图片 16. Matgray_diff11,gray_diff12;17. Mat gray_diff21,gray_diff22;18. Mat gray;//用来显示前景的19. bool pause=false;20.21. VideoCapture vido_file("test3.avi");//在这里改相应的文件名 22. namedWindow("foreground",0);23. for (;;)24. {25. if(!false)26. {27. vido_file >>img_src1; 28. cvtColor(img_src1,gray1,CV_BGR2GRAY);29.30. waitKey(33);31. vido_file >>img_src2; 32. cvtColor(img_src2,gray2,CV_BGR2GRAY);33. imshow("video_src",img_src2);//34.35. waitKey(33);36. vido_file >>img_src3;37. cvtColor(img_src3,gray3,CV_BGR2GRAY);38.39. Sobel(gray1,gray1, CV_8U,1,0,3,0.4,128);40. Sobel(gray2,gray2, CV_8U,1,0,3,0.4,128);41. Sobel(gray3,gray3, CV_8U,1,0,3,0.4,128);42.43. subtract(gray2,gray1,gray_diff11);//第二帧减第一帧44. subtract(gray1,gray2,gray_diff12);45. add(gray_diff11,gray_diff12,gray_diff1); 46.subtract(gray3,gray2,gray_diff21);//第三帧减第二帧47. subtract(gray2,gray3,gray_diff22); 48.add(gray_diff21,gray_diff22,gray_diff2);49.50. for(int i=0;i<gray_diff1.rows;i++)51. for(int j=0;j<gray_diff1.cols;j++) 52. {53. if(abs(gray_diff1.at<unsigned char>(i,j))>=threshold_diff1)//这里模板参数一定要用unsigned char,否则就一直报错54. gray_diff1.at<unsigned char>(i,j)=255; //第一次相减阈值处理 55. else gray_diff1.at<unsigned char>(i,j)=0;56.57. if(abs(gray_diff2.at<unsigned char>(i,j))>=threshold_diff2)//第二次相减阈值处理58. gray_diff2.at<unsigned char>(i,j)=255;59. else gray_diff2.at<unsigned char>(i,j)=0;60. }61. bitwise_and(gray_diff1,gray_diff2,gray);62.63. dilate(gray,gray,Mat());erode(gray,gray,Mat());64.65. imshow("foreground",gray); 66. }67. if( cvWaitKey(33) >= 0 ) 68. break;69. }70. return 0;71. }。
一种改进的三帧差分运动目标检测算法

一种改进的三帧差分运动目标检测算法三帧差分是一种常见的运动目标检测算法,它通过比较当前帧与前一帧、前一帧与前两帧之间的差异来判断目标的运动状态。
然而,传统的三帧差分算法存在着一些问题,如对于光照变化、背景噪音等较为敏感,同时在目标与背景颜色相似的情况下容易产生误检。
为了解决这些问题,我们提出了一种改进的三帧差分运动目标检测算法。
该算法主要包括以下几个步骤:1.彩色图像转灰度图像:将当前帧、前一帧和前两帧分别转换为灰度图像。
2.图像预处理:对每一帧的灰度图像进行高斯平滑处理,降低图像噪音的影响。
3.前景提取:将当前帧与前一帧进行差分,并设置一个阈值进行二值化,得到当前帧的前景图像。
4.背景更新:将前一个前景图像与当前帧的前景图像进行逻辑与运算,得到一个更新后的背景图像,用于下一帧的背景差分。
5.运动目标检测:对当前帧的前景图像进行形态学运算,主要包括膨胀和腐蚀,以填补小的空洞和消除噪音。
6.目标位置定位:根据前一帧的目标位置和当前帧的前景图像,利用轮廓检测算法得到目标的边界矩形框。
7.目标跟踪与识别:根据目标的边界框,将目标框内的区域提取出来,进行进一步的目标跟踪和识别。
通过对以上步骤进行改进,我们可以减少背景噪音的影响,提高目标检测的精度和稳定性。
具体的改进点如下:1.自适应阈值选取:传统的三帧差分算法使用固定的阈值进行二值化处理,容易受到光照变化和背景噪音的干扰。
我们采用自适应阈值选取方法,基于当前帧的灰度直方图,动态计算合适的阈值,提高算法对光照变化和背景噪音的适应能力。
2.动态背景更新:传统的三帧差分算法只更新前一帧的背景图像,可能导致长时间的目标停留造成背景的更新不及时。
我们采用动态背景更新的方法,将当前帧的前景图像与前两帧的背景图像进行逻辑与运算,得到一个更准确的背景图像。
这样可以更好地适应目标运动速度的变化。
3.目标定位优化:传统的三帧差分算法通过简单的轮廓检测方法得到目标的边界框,容易受到背景噪音和目标形状变化的影响。
基于两重三帧差分的运动目标检测算法的研究

d i r e c t i o n s S o b e l e d g e o p e r a t o r , i f n a l l y , t h e o b j e c t
i S e x t r a c t e d wi t h t h e me t ho d o f bi na r i z a t i O n pr o c e s s i ng t o r e mo v e t h e i r r e l e v a n t l i n e s . Wi t h t h e e xp e r i me n t v e r i ic f a t i o n ,t h i s a l g o r i t h m c a n op e r a t e s i mpl y ,i m pl e me nt e a s i l y ,a nd de t e c t
v e r y i mp o r t a n t r e s e a r c h or i e n t a t i o n i n t h e ie f l ds o f c o mp ut e r v i s i o n a n d vi d e o p r oc e s s i n g.Th i s
o f i ma g e s e q u e n c e s t o d o t h e o p e r a t i o n o f t h r e e — f r a me di f f e r e n c e al go r i t hm t wi c e ,a n d f us e s
p a p e r p r o p o s e s a n o v e l mo v i n g o b j e c t d e t e c t i o n
关于汽车的科技论文3000字怎么写

关于汽车的科技论文3000字怎么写在我国经济组成中,汽车产业对促进国民经济发展和社会进步具有重要的战略意义。
下面是小编为大家精心推荐的关于汽车的科技3000字论文,希望能对大家有所帮助。
汽车的科技3000字论文篇一:《试谈汽车超载监测系统》摘要:为了实时识别各种车型的超载车辆,该系统基于开源计算机视觉库(OpenCV),先根据车辆照片库建立车型分类器,然后使用数字摄像机拍摄进入监控区域的车辆,在视频中使用分类器识别车型,根据所识别得到的车型去查询数据库获得该车型的核载,再通过动态称重技术获得车辆的实际载重,及时判别车辆是否超载。
此方法可避免过去使用统一重量衡量不同车型是否超载的弊端,并可同时免线圈测量车速。
测试结果表明系统能快速准确地识别出车型。
配合动态称重系统,就能实时得出所通过的车辆是否超载,对公路养护和道路交通安全有相当大的实用意义。
关键词:超载监测; 视频识别; OpenCV; 动态称重超载车辆的危害很大,主要表现在加速道路损坏和危害道路交通安全,人们都深知其危害性,所以治理超载一直是公路监管部门的工作重点。
传统的自动超载信息系统都是使用统一标准,对所有车辆都应用同一个整车重量划分是否超载,这样会遗漏部分实际上已经超过该车型核载的超载车辆。
实际上,这部分车辆对道路交通同样造成严重影响。
鉴于此,本系统首先识别出车辆的车型,再查询得到该车型的核载重量,对比实测重量,便得知是否超载。
理论上能够适用于所有车型。
利用摄像机较长的视域,附加设计了一个测速系统,能方便地得出超速数据,以便作为超速监测和供给动态称重系统作参考。
1 系统构成1.1 系统方案系统主要工作过程为:车辆驶入摄像机监视范围,视频流通过以太网传输到后台处理系统,处理系统通过处理视频识别出车辆的车型,然后根据车型从数据库中查出相应的核载重量;同时,安装在地面的动态称重设备测出车辆的实际载重。
两个数据对比即可得出车辆是否超载。
系统流程如图1所示。
一种基于改进帧差法的运动目标检测
分析 统 计[; 3 李泉 富等 人提 出在 静 止 的背景 区 域应 ] 用 帧差 法 ,将 运动 目标 的区域 结 合彩 色 空 间的 阴
影 剪 除 算法 , 视 频 中 的车 辆 数 量进 行 检 测 ; 对 张
玲 等人 提 出应 用帧 差法 对 固定 车道 内的车 辆 进行 检测 ,结合 了浮 动窗 口的方 式 来消 除 非该 车 道 内
第 1 8卷 第 5期
21年 1 01 0月
莆 田 学 院 学 报
J u n l o P t a Un v ri o r a f u n i ie st y
中 图 分 类 号 : P 9 . 1 T 1 .2 T 3 1 ; N9 1 4 7
Vo _8 l No 5 l . Oc. 2 l t 0l
sibe frmo ig ojc dtc o h n saeo vn betvr sget n vdo ut l o v bet eet n w e hp fmo ig ojc ai ral i i . a n i e y e Ke r s f me df rn e ojc e ci ; e c ;mpo e loi m ywo d :r ieec ; betd t t n v l i i rvd a r a e o ot y g t h
基于OpenCV运动目标的检测研究

A s a t I i tei a b c rcg io l rh hc t rt eb c go n u t c o lo tm a dtetm b t c: n t s h s , oj t e ont n a o tm w i i e a st a k ru d sbr t nag rh n — r h sn e i gi hn g e h ai i h e
Re e r h n t e e to fM o i r e s Ba e o p nCV s a s o heD t c i n o v ng Ta g t s d n O e
ZHOU hi i,KOU q a S we Li i ng , TAN a l Xi ng u ( l g fIf r t na dElcrc l n ie r g, Col eo omai n e t a gn e n CUMT, z o 2 1 ) e n o i E i Xu h u2 1 16
p r ld f rn— i g a g r h u d rt e e vr n n fViu lC+ 60 i n r d e .I a s r s n s h w t mp e n h o a i e e c n lo t m n e h n i me to s a + . s i t u d . l p e e t o O i lme tt e f i o o t o ag r h wi e C n d ti a d l t t ep v tlc d so e p o r m. h sag r h o ti so t n fte c re t r me lo i m t Op n V i ea l n i s h ioa o e f h r ga T i lo t m b a n u l e o u r n a t h , s t i i h f
《2024年基于OpenCV的运动目标检测与跟踪》范文
《基于OpenCV的运动目标检测与跟踪》篇一一、引言随着计算机视觉技术的飞速发展,运动目标检测与跟踪作为计算机视觉领域的重要研究方向,已经得到了广泛的应用。
OpenCV(开源计算机视觉库)作为计算机视觉领域的强大工具,为运动目标检测与跟踪提供了有效的解决方案。
本文将详细介绍基于OpenCV的运动目标检测与跟踪的方法、原理及实践应用。
二、运动目标检测1. 背景减除法背景减除法是运动目标检测的常用方法之一。
该方法通过将当前图像与背景图像进行差分,从而提取出运动目标。
在OpenCV中,可以使用BackgroundSubtractorMOG2类实现背景减除法,该类可以适应动态背景,提高运动目标检测的准确性。
2. 光流法光流法是一种基于光流场的目标检测方法。
它通过计算图像序列中像素点的运动信息,从而检测出运动目标。
在OpenCV中,可以使用calcOpticalFlowPyrLK函数实现光流法,该方法对光照变化和背景干扰具有较强的鲁棒性。
3. 深度学习方法随着深度学习在计算机视觉领域的广泛应用,基于深度学习的运动目标检测方法也逐渐成为研究热点。
通过训练深度神经网络,可以提取出图像中的特征信息,从而更准确地检测出运动目标。
在OpenCV中,可以使用DNN模块实现基于深度学习的运动目标检测。
三、运动目标跟踪1. 基于特征的跟踪方法基于特征的跟踪方法通过提取目标区域的特征信息,如颜色、形状、纹理等,从而实现目标的跟踪。
在OpenCV中,可以使用Optical Flow、KLT跟踪器等实现基于特征的跟踪方法。
2. 基于区域的跟踪方法基于区域的跟踪方法通过在图像中搜索与目标区域相似的区域,从而实现目标的跟踪。
在OpenCV中,可以使用CamShift算法、MeanShift算法等实现基于区域的跟踪方法。
3. 深度学习在跟踪中的应用深度学习在跟踪领域的应用也越来越广泛。
通过训练深度神经网络,可以提取出更丰富的特征信息,提高跟踪的准确性。
改进三帧差分法与背景差分法结合的运动目标检测算法
改进三帧差分法与背景差分法结合的运动目标检测算法高林;王昌宇【摘要】针对传统三帧差分法对于运动速度较慢物体容易漏检等问题,提出了利用光流法对传统三帧算法改进并与背景差分法结合的运动目标检测算法.实验结果表明,改进的三帧差分算法与背景差分算法结合具有良好的抗躁性、适应性和鲁棒性.【期刊名称】《装备制造技术》【年(卷),期】2018(000)003【总页数】3页(P172-173,177)【关键词】三帧差分法;背景差分法;光流法;移动目标检测【作者】高林;王昌宇【作者单位】沈阳理工大学自动化与电气工程学院学院,辽宁沈阳110159;沈阳理工大学自动化与电气工程学院学院,辽宁沈阳110159【正文语种】中文【中图分类】TP3910 引言运动目标检测与识别的实用化是近几年图像识别领域重要研究方向,对运动目标图像的分割、跟踪和分类等在各个方面中都有重要应用。
目前,应用较多的算法是三帧差分法、背景差分法和光流法。
其中三帧差分法的优点是速度快,背景不用积累,但是对于与运动速度较慢物体容易漏检;背景差分法对于光照、天气等外界环境变化比较敏感;光流法具有精度相对较高的优点,但很难达到实时性[1]。
本文所提出的运动目标检测算法,能够达到最大程度降低噪声和最快速度反应目的。
1 应用光流法改进的三帧差分法利用金字塔Lucas-Kanade光流法对传统三帧差分算法进行改进。
采用金字塔结构来计算光流,可以减小光流计算的误差。
金字塔结构是对图像的各个层都计算光流矢量,首先计算出图像金字塔最高层处的光流,然后将该光流定义为下一层金字塔的起始点,重复上述过程,直至计算到金字塔的最底层[5]。
最后提取出可能存在运动目标的区域,根据不同的阈值在该区域内提取各个目标,这样便将光流法与传统的三帧差分算法结合了起来。
Lucas-Kanade光流法需要满足以下条件:(1)相邻的帧图像的灰度值不变;(2)该像素点邻域内的点具有相似的运动状态;(3)图像运动随时间的变化相对比较缓慢[3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作是 : 首先需要 有 一 张 背 景 图 像 , 然后对视频图像 和此背景图像进行差分运算 , 用一张新的图像保存 差分结果的绝对值 。 背景差分法的应用需要有一定的限制和约束 。
*
收稿日期 : 修回日期 : 2 0 1 1年5月1 0日, 2 0 1 1年6月2 3日 作者简介 : 徐卫星 , 男, 研究方向 : 运动目标的在线检测 。 王兰英 , 女, 硕士研究生 , 研究方向 : 嵌入式系统与图像处 理 。 李秀娟 , 女, 教授 , 硕士生导师 , 研究方向 : 图像信息处理与智能控制 。
1 4 2
徐卫星等 :一种基于 O e n C V 实现的三帧差分运动目标检测算法研究 p
第3 卷
要求前景 ( 运 动 物 体) 像素的灰度值和背景像素的 同时要求摄像机是静止 灰度值存 在 一 定 的 差 别 , 的 。 再者背景差分法作用于像素 , 在这个低层次的 处理中 , 操作的 对 象 是 单 个 的 像 素 , 由于缺乏对图 , 理解 ” 检测结果很容易受噪声和各种突 像的足够 “ 使检测结果的准确度大大下降 。 但由于 变的影响 , 背景差分法具 有 实 现 简 单 , 运 算 速 度 快, 在大多数 所以背景差分 情况下检测结果能完整的突出优点 , 法已成为应用最广泛的运动检测方法 。 )帧间差 分 法 同 背 景 差 分 一 样 , 也是一种基 2 于像素的运动检测方法 , 它通过对视频图像序列中 相邻的两帧图 像 进 行 差 分 运 算 来 获 得 运 动 物 体 轮 廓
[ 7]
向, A B 部分代表第一帧 图 像, B C 部分代表第二
帧图像 , C D 部分 代 表 第 三 帧 图 像。 帧 间 差 分 法 能 够检测出相邻两帧间发生了变化的区域 , 这个区域 实际上包括运 动 物 体 在 前 一 帧 所 覆 盖 的 区 域 即 显 露区 A 和运动物体现在所覆盖的区域 B 即图中 C, 显然这比运动目标的实际轮廓要 画左斜线的部分 , 大 。 同样 , 第三帧图像减去第二帧图像的结果是 即 图 中 画 右 斜 线 的 部 分。 本 文 的 三 B C D 三部分 , 帧差 分 法 就 是 将 两 个 差 分 图 像 A B C和B C D做 “ 与” 运算 , 结果为 B 刚好为完整的运动目标 。 C, 2. 2 三帧差分算法 )从视 频 图 像 序 列 中 选 取 连 续 的 三 帧 图 像 , 1 , , 其中第一帧图像I 第二帧 图 像 I x, x, y) y) k-1 ( k( ; 第三帧图像l x, y) k+1 ( )计算第一帧与第二帧的差值图像 A( , 2 x, y) 得到目标的变化量 ; )计算第二帧与第三帧的差值图像 B( , 3 x, y) 得到目标的变化量 ; )求帧差 A( 与 B( 的交集得到运动 4 x, x, y) y) 目标粗糙的运动区域图像 ; )运用数学形态学运算去掉背景中噪声 。 5 2. 3 帧间差分计算 , 设图像序列 表 示 为 I 其中( 表示 x, x, y) y) i( 图像中像素点的位置坐标 , 或 i 表示第i 帧的图像 ( 。选取图像序列中连续的三 者称为i 时刻的图像 ) , , , 帧图像I 分别计算 x, I x, I x, y) y) y) i -1 ( i( i +1 ( ) 差值图像用式 ( 表示 : 相邻两帧图像的差值图像 , 1
[ 9]
通过差 邻两帧图像之间的差值来获得运动区域的 , 值图像能快速 地 检 测 出 相 邻 图 像 中 运 动 目 标 所 引 但是它提取的运动目标比实际的要 起的运动范围 , 大, 往往出现 “ 双影 ” 现象 ; 另外 , 由于检测出来的物 无法检测到重叠部 体是前后两帧相对变化的部分 ,
1 2] 。为了 导致 检 测 到 的 目 标 发 生 “ 空洞” 现 象[ 分,
*
徐卫星 王兰英 李秀娟
( ) 河南工业大学电气工程学院 郑州 4 5 0 0 0 7 摘 要 运动目标检测在视觉监控系统 、 医学图像分析 、 工业检 测 和 军 事 等 领 域 有 着 广 泛 的 应 用 。 运 动 目 标 检 测 处 于 这些应用的最前端 , 检测结果的准 确 精 度 对 后 续 处 理 有 很 大 的 影 响 。 文 中 提 出 了 一 种 三 帧 差 分 运 动 目 标 检 测 算 法 , 利用 并与基本帧间差分算法进行对 比 分 析 , 结果表明该 算 法 准 确 率 高, 运 算 速 度 快, 能满足实 O e n C V 函数库进行了仿真测试 , p 时要求 。 关键词 三帧差分 ;运动目标检测 ; O e n C V p 中图分类号 T P 3 0 1. 6
克服帧间差分法所存在的问题 , 本文采用了一种改 进的帧间 差 分 法 — 三 帧 差 分 来 检 测 运 动 目 标 。 三 帧差分法是在帧间差分的基础上进行改进 , 将相邻 能较好的检测出 的三帧图像作为一组进行再差分 , 中间帧运动目标的形状轮廓 。 三帧 差 分 的 实 现 原 理 如 图 1 所 示。 箭 头 的 方向 代 表 目 标 运 动 的 方
总第 2 6 5期 2 0 1 1 年第 1 1期
计算机与数字工程 C o m u t e r &D i i t a l E n i n e e r i n p g g g
V o l . 3 9N o . 1 1 1 4 1
一种基于 O e n C V 实现的三帧差分运动 p 目标检测算法研究
究运动目标的 检 测 具 有 重 要 意 义 。 在 背 景 静 止 的
6] : 情况 下 , 常 用 的 运 动 目 标 检 测 方 法 主 要 有 三 种[
帧间差分法 、 背景减除法 、 光流法 , 三种方法各有优 缺点 , 各有适用的场合 。 )背景差分法通过 输 入 图 像 与 背 景 图 像 进 行 1
1 引言
现实生活中 , 大量有意义的视觉信息都包括在 运动之中 。 尽管 人 类 的 视 觉 即 能 看 见 运 动 物 体 又 能看到静止的 物 体 , 但 是 在 许 多 场 合, 比如重要场 汽 车 的 自 动 驾 驶 和 辅 助 驾 驶、 交通 所的保安监控 、 流量的控制 、 航 空 和 军 用 飞 行 器 的 制 导, 人们往往 只对运动目标 物 体 感 兴 趣 。 运 动 目 标 检 测 是 目 标 跟踪 、 目标分类 、 目标行为理解的基础 , 获取准确的 运动目标对于 后 面 的 处 理 具 有 重 要 意 义 , 因 此, 研
,m , A b s t r a c t o v i n t a r e t d e t e c t i o n i s w i d e l u s e d i n v i d e o s u r v e i l l a n c e e d i c a l i m a e r o c e s s i n i n d u s t r i a l d e t e c t i o n M g g y g p g , , a n d m i l i t a r f i e l d e t c . D e t e c t i o n o f m o v i n o b e c t i s t h e f i r s t s t a e f o r t h e s e a l i c a t i o n s s o t h e a c c u r a c o f r o c e s s i n r e s u l t y g j g p p y p g i n f l u e n c e o n t h e f o l l o w u t r e a t m e n t . T h i s a t h r e e f r a m e d i f f e r e n c e a l o r i t h m f o r m o v i n t a r e t d e t e c r e a t l a e r r e s e n t s - - - p g g g g y p p p , ,m t i o n . S o m e s i m u l a t i o n t e s t s a r e c a r r i e d o u t b t h e a l o r i t h m a n d t h e b a s i c f r a m e d i f f e r e n c e m e t h o d r e s e c t i v e l o r e o v e r y g p y ,w t h e r o o s e d r e s u l t s a r e a n a l z e d c o m a r a t i v e l .T h e r e s u l t s i l l u s t r a t e t h a t t h e a l o r i t h m i s m o r e a c c u r a t e a n d r a i d h a t p p y p y g p f u l f i l l t h e r e a l t i m e r e u i r e m e n t . c a n q , , K e Wo r d s t h r e e f r a m e d i f f e r e n t i a l d e t e c t i o n o f m o v i n o b e c t O e n C V - g j p y C l a s s N u m b e r P 3 0 1. 6 T
T h r e e i m a e D i f f e r e n c e A l o r i t h m f o r M o v i n a r e t D e t e c t i o n - g g gT g o n O e n C V B a s e d p
X u W e i x i n a n L a n i n i X i u u a n W L g g y g j ( ,H , ) C o l l e e o f E l e c t r i c a l E n i n e e r i n e n a n U n i v e r s i t o f T e c h n o l o Z h e n z h o u 5 0 0 0 7 4 g g g y g y g