第四章人的运动系统及其设计
运动生理学完整版
运动生理学完整版一、教学内容本节课的教学内容选自人民教育出版社的《小学体育课程标准》第四章第二节“运动生理学”。
具体内容包括:运动系统的组成,骨、关节、骨骼肌的协调配合,运动生理学的基本概念,以及运动对人体生理功能的影响。
二、教学目标1. 让学生了解运动生理学的基本概念,理解运动系统的组成及骨、关节、骨骼肌的协调配合。
2. 通过观察和实验,使学生掌握运动对人体生理功能的影响。
3. 培养学生的观察能力、思考能力和实践能力,提高他们对体育运动的兴趣。
三、教学难点与重点1. 教学难点:运动对人体生理功能的影响。
2. 教学重点:运动系统的组成,骨、关节、骨骼肌的协调配合。
四、教具与学具准备1. 教具:PPT、模型、视频等。
2. 学具:笔记本、彩色笔等。
五、教学过程1. 导入:通过让学生观察人体的运动系统模型,引发他们对运动生理学的兴趣。
2. 讲解:详细讲解运动系统的组成,骨、关节、骨骼肌的协调配合,以及运动生理学的基本概念。
3. 实践:让学生分组进行实验,观察运动对人体生理功能的影响。
4. 讨论:分组讨论实验结果,引导学生运用运动生理学的知识进行分析。
六、板书设计1. 运动系统的组成2. 骨、关节、骨骼肌的协调配合3. 运动生理学的基本概念4. 运动对人体生理功能的影响七、作业设计1. 题目:请根据本节课的内容,画出运动系统的组成图。
答案:略2. 题目:请列举三种运动对人体生理功能的影响。
答案:略八、课后反思及拓展延伸2. 拓展延伸:让学生课后调查不同运动对身体健康的影响,下节课分享成果。
重点和难点解析一、教学难点与重点本节课的教学难点是运动对人体生理功能的影响,这是因为这一部分内容涉及到人体的复杂生理机制,需要学生具备一定的生理学知识才能理解和掌握。
而教学重点则是运动系统的组成,骨、关节、骨骼肌的协调配合,这是因为这部分内容是理解人体运动生理学的基础,对于学生来说具有重要的意义。
二、教学过程在本节课的教学过程中,有几个重点环节需要特别关注。
科学教案《身体的奥秘》
《身体的奥秘》第一章:人体的基本结构1.1 教学目标:了解人体的基本组成结构,包括细胞、组织、器官和系统。
掌握人体各个系统的主要功能和相互之间的关系。
1.2 教学内容:细胞的结构和功能组织的类型和功能器官的组成和功能人体系统的介绍和功能1.3 教学方法:采用多媒体演示和互动游戏,让学生直观地了解人体结构。
分组讨论,让学生通过合作探究人体各个系统的功能。
1.4 教学评估:进行小组讨论,评估学生对人体的基本结构的掌握程度。
设计相关习题,评估学生对各个系统功能的了解。
第二章:人体的感觉系统2.1 教学目标:了解人体的感觉系统的组成和功能。
掌握不同感觉器官的作用和感受过程。
2.2 教学内容:视觉系统的结构和功能听觉系统的结构和功能嗅觉系统的结构和功能味觉系统的结构和功能2.3 教学方法:通过实验和观察,让学生亲身体验不同感觉的运作过程。
小组讨论,让学生探讨不同感觉系统的相互关系和作用。
2.4 教学评估:观察学生的实验操作和参与程度,评估学生对感觉系统的理解。
设计相关习题,评估学生对不同感觉器官的认识。
第三章:人体的运动系统3.1 教学目标:了解人体的运动系统的组成和功能。
掌握骨骼、肌肉和关节的作用和相互关系。
3.2 教学内容:骨骼的结构和功能肌肉的类型和功能关节的类型和功能人体的运动原理3.3 教学方法:通过模型和实物展示,让学生直观地了解运动系统的组成。
小组合作,让学生通过实验和观察了解运动原理。
3.4 教学评估:观察学生的实验操作和参与程度,评估学生对运动系统的理解。
设计相关习题,评估学生对骨骼、肌肉和关节的认识。
第四章:人体的循环系统4.1 教学目标:了解人体的循环系统的组成和功能。
掌握心脏、血管和血液的作用和相互关系。
4.2 教学内容:心脏的结构和功能血管的类型和功能血液的组成和功能血液循环的过程4.3 教学方法:通过模型和图示,让学生直观地了解循环系统的组成。
小组讨论,让学生通过实验和观察了解血液循环的过程。
《运动生理学教案》课件

《运动生理学教案》课件一、课程概述1. 课程目的:本课程旨在帮助学生了解和掌握运动生理学的基本概念、原理和知识点,使学生能够运用运动生理学的知识解释和分析运动过程中的生理现象,提高运动能力和健康水平。
2. 适用对象:本课程适用于体育专业学生、教练员、运动员及相关爱好者。
3. 课程内容:本课程共十个章节,涵盖运动系统、能量代谢与能量供应、运动与心血管系统、运动与呼吸系统、运动与消化系统、运动与泌尿系统、运动与内分泌系统、运动与神经系统、运动与免疫系统以及运动与骨骼肌等方面的内容。
二、第一章:运动系统1. 教学目标:使学生了解运动系统的组成、功能和运动机制,掌握运动生理学的基本概念。
2. 教学内容:(1)运动系统的组成及功能(2)运动机制(3)运动生理学基本概念3. 教学方法:(1)讲授:讲解运动系统的组成、功能和运动机制(2)互动:引导学生参与讨论,提问回答(3)示教:演示运动生理学实验,让学生直观了解运动过程三、第二章:能量代谢与能量供应1. 教学目标:使学生了解能量代谢的原理、能量供应的途径和运动过程中的能量变化,培养学生科学锻炼的能力。
2. 教学内容:(1)能量代谢的原理(2)能量供应的途径(3)运动过程中的能量变化3. 教学方法:(1)讲授:讲解能量代谢的原理、能量供应的途径和运动过程中的能量变化(2)互动:引导学生参与讨论,提问回答(3)实践:安排学生进行运动实验,观察和记录能量变化四、第三章:运动与心血管系统1. 教学目标:使学生了解运动对心血管系统的影响,掌握心血管系统的调节机制,提高运动心血管健康水平。
2. 教学内容:(1)运动对心血管系统的影响(2)心血管系统的调节机制3. 教学方法:(1)讲授:讲解运动对心血管系统的影响和心血管系统的调节机制(3)示教:演示心血管系统的实验,让学生直观了解心血管系统的运动调节五、第四章:运动与呼吸系统1. 教学目标:使学生了解运动对呼吸系统的影响,掌握呼吸系统的调节机制,提高运动呼吸健康水平。
第四章 体育运动的学科基础理论
二、循环系统
1.血液 2.心血管系统:心脏、血管
三、呼吸系统
1.组成:呼吸道、肺 2.呼吸运动:吸气运动、呼气运动
四、消化系统
五、神经系统
1.中枢神经系统:脑、脊髓 2.周围神经系统:脑神经、脊神经、自主神经
第二节 体育运动与生理学
一、运动中的能量供应
1.能量的来源:有氧氧化系统、乳酸能系统(糖酵解系统)、ATP-CP系统 2.三大供能系统之间的关系 3.能量物质的消耗与补充
第五节 体育运动与其他学科基础理论
一、体育运动与组织行为学
(一)与团队有关的概念
1.团队:由员工和管理层组成的一个共同体,该共同体合理利用 每一个成员的知识和技能协同工作,解决问题,实现共同目标。
组成要素:人员、目标、定位、计划、权限。 2.团队沟通 3.团队的影响力:①积极影响;②对个人的影响
(二)组织行为学为体育运动提供了帮助
第四章 体育运动的学科理论基础
教学目的与要求
了解体育运动与人体结构的关系,理解体育运动的生理学、心理学、运 动学等学科基础理论
教学重点
体育运动的人体结构关系及相应的基础学科理论
教学难点
体育运动的生理学、心理学、运动学等学科基础理论
第一节 体育运动与人体结构
一、运动系统
1.骨骼 2.骨连结 3.骨骼肌
二、人体运动时的氧供应
三、运动负荷的生理学评定
(一)评定体育锻炼效果的简易生理指标
心率(或脉搏)、血压、肌肉力量、呼吸频率、恢复时间
(二)定量负荷时体育锻炼效果的生理评定
1.30秒20次蹲起 2.习惯的体育锻炼方式
第三节 体育运动与心理学
一、体育运动的心理效应
1.体育运动与情绪、情感 2.体育运动与意志品质 3.体育运动与动机 4.体育运动与认知能力 5.体育运动与兴趣 6.体育运动与心理疾病的防治
全新人体使用手册(3篇)

第1篇第一章:人体概览一、人体定义人体,即人类有机体,是自然界中最复杂、最精妙的生物体。
人类作为地球上的智慧生物,拥有丰富的情感、思维和创造力,具有独特的生存和发展能力。
二、人体结构人体由八大系统组成,分别为:运动系统、消化系统、呼吸系统、循环系统、泌尿系统、神经系统、内分泌系统和生殖系统。
三、人体功能人体具有以下基本功能:1. 生长发育:人体在出生后不断生长发育,直至成熟。
2. 代谢:人体通过代谢过程,将摄入的营养物质转化为能量和物质,同时排出废物。
3. 防御:人体具有免疫系统,能够抵御外来病原体的侵害。
4. 适应:人体具有适应性,能够适应环境变化,保持生命活动。
5. 传递信息:神经系统负责传递信息,使人体各部分协调工作。
第二章:运动系统一、骨骼骨骼是人体的支架,由206块骨骼组成。
骨骼具有保护内脏、支持体重、储存钙质等作用。
二、肌肉肌肉是人体运动的动力来源,分为骨骼肌、平滑肌和心肌。
骨骼肌通过收缩和舒张,使人体产生运动。
三、关节关节是连接骨骼的部位,使骨骼能够灵活运动。
人体共有360多个关节,分为球窝关节、滑膜关节、单轴关节等。
四、运动系统功能运动系统能够使人体进行各种运动,如行走、跳跃、跑步等,保持人体姿势稳定。
第三章:消化系统一、口腔口腔是消化系统的起始部位,负责咀嚼食物,分泌唾液,帮助食物消化。
二、食管食管是连接口腔和胃的管道,将食物送入胃。
三、胃胃是消化系统的中转站,负责储存、混合和初步消化食物。
四、小肠小肠是消化和吸收营养物质的主要场所,分为十二指肠、空肠和回肠。
五、大肠大肠负责吸收水分和电解质,将食物残渣转化为粪便。
六、消化系统功能消化系统能够将食物分解为营养物质,为人体提供能量和物质。
第四章:呼吸系统一、鼻腔鼻腔是呼吸系统的起始部位,负责过滤、加湿和加热空气。
二、咽咽是连接鼻腔和食管的管道,同时负责呼吸和吞咽。
三、气管气管是连接咽和肺的管道,将空气送入肺。
肺是呼吸系统的核心器官,负责氧气的吸入和二氧化碳的排出。
人解生理运动系统

神经调节机制
01
运动神经元
运动神经元是控制肌肉收缩的神经元,其轴突末梢与肌肉纤维形成运动
终板,传递神经冲动。
02
神经递质
神经递质如乙酰胆碱在神经肌肉接头处释放,引起肌肉收缩。
03
反射弧
反射弧是实现神经调节的基本结构,包括感受器、传入神经、中枢、传
出神经和效应器五个部分。通过反射弧,神经系统可实现对运动系统的
肌肉拉伤、扭伤和挫伤处理
肌肉拉伤处理
轻度拉伤可局部冷敷、加压包扎、 抬高伤肢等;重度拉伤应及时就 医,可能需要手术治疗。
扭伤处理
扭伤后应立即停止活动,局部冷敷, 加压包扎,抬高伤肢,适当制动休 息;严重扭伤应及时就医。
挫伤处理
轻度挫伤可局部冷敷、加压包扎、 抬高伤肢等;重度挫伤应及时就医, 可能需要手术治疗。
骨骼功能
保护内脏器官,提供肌肉 附着点,储存矿物质,参 与造血等。
骨骼类型
长骨、短骨、扁骨、不规 则骨等。
关节与连接方式
关节类型
滑膜关节、纤维连接、软 骨连接等。
关节结构
关节面、关节囊、关节腔。
关节运动
屈、伸、内收、外展、旋 转等。
肌肉组织与功能
肌肉类型
01
骨骼肌、心肌、平滑肌。
肌肉结构
02
肌纤维、肌膜、肌束膜、肌外膜。
注意保暖
寒冷天气时注意关节保暖,可佩戴护膝、护 腕等护具,以减少关节受寒引起的疼痛和不
适。
肌肉锻炼:增强力量、提高柔韧性
要点一
增强力量
要点二
提高柔韧性
进行适量的力量训练,如举重、俯卧撑等,可以增强肌肉 力量和耐力。
进行拉伸运动,如瑜伽、太极等,可以提高肌肉柔韧性, 预防肌肉拉伤。
解剖学基础第四章《运动系统—肌肉》PPT课件
(一)背肌
1.斜方肌
斜方肌
背阔肌
呈三角形,位于项部和 背部浅层,使肩胛骨向 脊柱靠拢;上部肌束可 上提肩胛骨;下部肌束 使肩胛骨下降
瘫痪时,产生“塌肩”
2.背阔肌
斜方肌
背阔肌
面积最大的扁肌,呈三角形,使肱骨内收、旋内和后伸 当上肢上举被固定时,可引体向上
3.竖脊肌 :纵列于躯干的背面,脊柱两侧的沟内
竖 脊 肌
维持身体直立,使脊柱后伸和头后仰
`
(二)胸肌
包括:胸大肌、胸小肌、前锯肌 ,肋间外肌,肋间内肌
胸小肌
胸大肌
前锯肌 肋间肌
(1)胸大肌
起于锁骨内侧半、胸骨和上 6 位肋软骨,止于肱骨的大结 节嵴,使肩关节内收、旋内和屈,也可提躯干和提肋助呼吸
胸
胸
小
大
肌
肌
作用:使肩关节内收、旋内和前屈
(2)胸小肌
(三)肌的起止点、配布及作用
固定骨上的附着点--- 起点(定点) 拮抗肌 --------作用相反的肌 协同肌 --------功能相同的肌
移动骨上的附着点--- 止点(动点)
肌的命名法
形状:斜方肌,三角肌 位置:冈上肌,骨间肌 形态结构和部位:肱三头肌 大小和位置:腰大肌 起止点:胸锁乳突肌,胸骨舌骨肌 作用:旋后肌,大收肌 位置和方向:腹外斜肌,腹横肌
(四)肌的辅助结构
1.筋膜—浅筋膜和深筋膜
股骨
皮肤 浅筋膜
深筋膜
浅筋膜又称皮下筋膜,由疏松结缔组织构成,内有血管、神经走行
深筋膜(固有筋膜)
肌间隔
由致密结缔组织构成,形成肌间隔、腺体被膜和血管神经鞘
2.滑膜囊:多位于关节周围的肌腱和骨面之间
关节面 (关节软骨)
《人体工程学》电子教案

《人体工程学》电子教案第一章:人体工程学概述1.1 人体工程学的定义解释人体工程学的概念和基本原理强调人体工程学在现代科技领域的重要性1.2 人体工程学的历史与发展介绍人体工程学的发展历程和里程碑事件分析人体工程学发展的驱动因素1.3 人体工程学的应用领域探讨人体工程学在各个领域的应用实例引导学生思考人体工程学的实际意义和价值第二章:人体解剖学基础2.1 人体结构与功能介绍人体的基本结构和功能单位强调人体各系统之间的相互关联和平衡2.2 人体运动系统详细解析人体的骨骼和肌肉组织探讨人体运动系统的原理和机制2.3 人体神经系统讲解人体神经系统的组成和功能强调神经系统对人体运动和感觉的重要性第三章:人体工程学设计与应用3.1 人体工程学设计原则介绍人体工程学设计的基本原则和方法引导学生理解人体工程学设计的目标和意义3.2 人体工程学设计与产品开发探讨人体工程学在产品开发中的应用分析实际案例,展示人体工程学设计的效果3.3 人体工程学与健康讨论人体工程学设计与健康之间的关系强调人体工程学在提高生活质量方面的作用第四章:人体工程学测量与评估4.1 人体测量学基础介绍人体测量学的基本概念和方法强调人体测量在人体工程学中的重要性4.2 人体测量技术与工具讲解常用的人体测量技术和工具探讨如何选择合适的测量方法和工具4.3 人体工程学评估方法介绍人体工程学评估的基本方法和步骤强调评估结果的可靠性和有效性第五章:人体工程学在工程领域的应用5.1 人体工程学在汽车设计中的应用分析人体工程学在汽车座椅、方向盘设计等方面的应用强调人体工程学在提高驾驶舒适性和安全性的作用5.2 人体工程学在建筑设计中的应用探讨人体工程学在建筑设计中的重要性分析实际案例,展示人体工程学在建筑设计的应用效果5.3 人体工程学在制造业中的应用讲解人体工程学在制造业中的重要应用领域强调人体工程学在提高工作效率和减少职业病方面的作用第六章:人体工程学在产品设计中的应用6.1 人体工程学与家具设计分析人体工程学在家具设计中的重要性探讨如何通过人体工程学原理设计更舒适的家具6.2 人体工程学在显示器设计中的应用讲解人体工程学在计算机显示器设计中的作用强调合理显示器设计对减少视觉疲劳的重要性6.3 人体工程学在办公环境设计中的应用探讨人体工程学在办公环境设计中的重要性分析实际案例,展示人体工程学在办公环境设计中的应用效果第七章:人体工程学在运动与康复领域的应用7.1 人体工程学与运动器材设计分析人体工程学在运动器材设计中的重要性探讨如何通过人体工程学原理设计更安全的运动器材7.2 人体工程学在康复工程中的应用讲解人体工程学在康复工程中的作用强调人体工程学在帮助残疾人士恢复功能的重要性7.3 人体工程学在假肢设计中的应用探讨人体工程学在假肢设计中的重要性分析实际案例,展示人体工程学在假肢设计中的应用效果第八章:人体工程学在军事与安全领域的应用8.1 人体工程学在军事装备设计中的应用分析人体工程学在军事装备设计中的重要性探讨如何通过人体工程学原理设计更符合士兵需求的安全装备8.2 人体工程学在交通工具设计中的应用讲解人体工程学在交通工具设计中的作用强调人体工程学在提高交通工具乘坐舒适性和安全性的重要性8.3 人体工程学在个人防护装备设计中的应用探讨人体工程学在个人防护装备设计中的重要性分析实际案例,展示人体工程学在个人防护装备设计中的应用效果第九章:人体工程学在环境与人机交互领域的应用9.1 人体工程学与环境设计分析人体工程学在环境设计中的重要性探讨如何通过人体工程学原理设计更符合人类需求的环境9.2 人体工程学与人机交互讲解人体工程学在人机交互领域的应用强调人体工程学在提高人机交互效率和用户体验的重要性9.3 人体工程学在虚拟现实与增强现实领域的应用探讨人体工程学在虚拟现实与增强现实领域的重要性分析实际案例,展示人体工程学在虚拟现实与增强现实领域的应用效果第十章:人体工程学的未来发展10.1 人体工程学的发展趋势分析人体工程学未来的发展趋势和挑战引导学生思考人体工程学在未来的应用前景10.2 人体工程学的技术创新讲解人体工程学领域的技术创新和突破强调新技术对人体工程学发展的推动作用10.3 人体工程学在教育与培训中的应用探讨人体工程学在教育和培训中的重要性分析实际案例,展示人体工程学在教育和培训中的应用效果重点和难点解析重点环节一:人体工程学的定义与重要性补充说明:人体工程学是一门综合性学科,它涉及生物学、医学、工程学、设计等多个领域,主要研究人在各种环境和设备中的工作和生活条件,以提高人的舒适性、健康和工作效率。
第四章 第三节 腕关节运动学

第三节《腕手关节运动学》
武汉民政职业学院康复医疗学院肖晓鸿
内容提要
(一)腕关节组成和运动方向 (二)腕关节的功能解剖 (三)腕关节生物力学
教学基本要求
1.掌握腕、手关节的功能解剖、腕和手运动的相互影响 2.熟悉腕、手关节组成和运动方向、腕关节的运动范围、腕掌关
节的运动范围、腕的稳定性 3.了解腕、手关节动力学、腕关节的附加运动、前臂的旋前-旋后
(二)指关节的功能解剖
1.骨 指骨是长骨,每节指骨分底、体、小头三部。拇指分为 近、远节指骨,2~5指为近、中、远节指骨。近节指骨 底为卵圆形凹陷的关节面,与掌骨小头相关节,远侧的 头呈双髁状,其间有髁间凹陷。中节指骨和远节指骨基 底的关节面类似于近节指骨。
(二)指关节的功能解剖
• 2.关节 (1)掌指关节 共五个,由掌骨头和近 节指骨底构成。近节指 骨基底部关节软骨形成 掌板,两侧有内外侧副 韧带加强。当握拳时, 掌指关节最稳固。拇指 掌面有两籽骨,当拇指 精细捏挟时,籽骨作用 使拇指产生动力性旋转。
教学基本要求
1.掌握指关节的功能解剖、适于抓握功能的模式 2.熟悉指关节组成和运动方向、指关节的运动范围、手
的稳定性和控制 3.了解一个抓握模式的分析
重点和难点
重点:指关节的功能解剖、适于抓握功能的模式、指关节运 动方向、指关节的运动范围、手的稳定性和控制 难点:对抓握模式的分析
(一)指关节的组成和运动方向
手弓
• 手弓是手部有两个横弓和一个纵弓,它们是由手的骨关 节和肌肉保持一定的位置,相互平衡发挥手协调、灵巧 的活动功能。
• 横弓有腕骨弓和掌弓;腕骨弓由远列4个腕骨紧密连结 而成,其屈侧构成腕管,与第2、3掌骨近端相连,构 成腕掌关节。
工业机器人第四章-工业机器人结构设计

缺点
直接连结传动
直接装在关节上
结构紧凑
需考虑电机自重,转动惯量大,能耗大
远距离连结传动
经远距离传动装置与关节相连
不需考虑电机自重,平衡性良好
额外的间隙和柔性,结构庞大,能耗大
间接传动
经速比远>1的传动装置与关节相连
经济、对载荷变化不敏感、便于制动设计、方便一些运动转换
传动精度低、结构不紧凑、引入误差,降低可靠性
直接驱动
不经中间关节或经速比=1的传动装置与关节相连
传动精度高,振动小,传动损耗小,可靠性高,响应快
控制系统设计困难,对传感元件要求高,成本高
一 工业机器人总体设计
模块化结构设计 模块化工业机器人 由一些标准化、系列化的模块件通过具有特殊功能的结合部用积木拼搭方式组成的工业机器人系统。 模块化工业机器人的特点 经济性 灵活性 存在的问题 刚度比较差 整体重量偏重 模块针对性待提高
谐波齿轮传动是靠柔性齿轮(柔轮)所产生的可控弹性变形来实现传递运动和动力的。它的基本构件有:柔轮、波发生器和刚轮。三个构件中可任意固定一个,其余两个一为主动、一为从动,可实现减速或增速(固定传动比),也可变换成两个输入,一个输出 ,组成差动传动。
当刚轮固定,波发生器为主动,柔轮为从动时,柔轮在椭圆凸轮作用下产生变形,在波发生器长轴两端处的柔轮轮齿与刚轮轮齿完全啮合;在短轴两端处的柔轮轮齿与刚轮轮齿完全脱开;在波发生器长轴与短轴区间,柔轮轮齿与刚轮轮齿有的处于半啮合状态,称为啮入;有的则逐渐退出啮合处于半脱开状态,称为啮出。由于波发生器的连续转动,使得啮入、完全啮合、啮出、完全脱开这四种情况依次变化,循环不已。由于柔轮比刚轮的齿数少2 ,所以当波发生器转动一周时,柔轮向相反方向转过两个齿的角度,从而实现了大的减速比。
解剖学课件:运动系统
(四)腹肌 腹肌位于胸廓与骨盆之间,包括腹前外侧壁的 腹外斜肌、腹内斜肌、腹横肌和腹直肌,以及腹后 壁的腰方肌。 1.腹外斜肌 位于腹前外侧壁的浅层。肌束 由后上斜向前下,在腹直肌外侧缘移行为腱膜,跨 腹直肌前面,终于白线。腱膜的下缘增厚,连于髂 前上棘形成一个三角形的腹股沟管浅环。
Page 5
(二)骨连结 骨连结分直接连结和间接连结。 1.直接连结 是骨与骨之间借纤维结缔组织 、软骨或骨组织直接连结而成。 2.间接连结 又称关节,有间隙,活动性大 。
Page 6
(1)关节的基本结构 包括关节面、关节囊 和关节腔。 关节面:是构成关节的各骨之间的接触面。关 节面上覆盖一层光滑的关节软骨,有减少摩擦、缓 冲外力的作用。 关节囊:是附着于关节周围的结缔组织囊。 (2)关节的运动 主要有屈和伸、内收和外 展、旋转和环转。
第四章 运动系统
内容提要
Page 1
第一节
骨和骨连结
一、概述 (一)骨 成人共有206块骨。 1.分类 骨按部位分为:躯干骨、颅骨、四肢骨。 骨按形态分为:长骨,呈管状,有骨髓腔,两 端膨大为骺,中部为骨干,位于四肢;短骨,呈立 方形,位于腕部和踝部;扁骨,呈板状,围成颅腔 、胸腔和盆腔壁;不规则骨,呈不规则,位于颅底 、躯干。
Page 32
(二)肌的起止 靠近身体正中矢状面或四肢近侧端的附着点, 称为起点;反之称为止点。 (三)肌的配布———拮抗安排 关节周围有屈肌,就有伸肌;有内收肌,就有 外展肌;有旋内肌,就有旋外肌,这些作用相反, 但又互相依存、互相协调、互相配合的肌,互称拮 抗肌。
Page 33
(四)肌的辅助结构 1.筋膜
Page 29
3)耻骨联合 由两侧的耻骨联合面借纤维软 骨连结而成。 4)骨盆 组成:骨盆由骶骨、尾骨、两块髋骨及骨连结 构成。
第四章运动系统颅骨、上肢骨、下肢骨
课题
第四章颅骨及其连接、四肢骨及其连接
教学目标
理解颅骨的组成、颅骨的整体观、骨盆组成、四肢骨的分部及主要骨的名称和位置、腕关节、踝关节的组成和运动
掌握肩关节、肘关节、髋关节、膝关节组成结构特点和运动、胸骨角肋弓体表标志
教学重点
肩关节、肘关节、髋关节、膝关节组成结构特点和运动、胸骨角肋弓体表标志,膈肌作用结构
开口于蝶筛隐窝。
4.颅底外面观:颅底外面前部由上颌骨和腭骨水平板围成的部分称骨腭中部是蝶骨的翼
;突后部正中有一大孔称枕骨大孔其前外方分别有破裂孔、颈静脉孔、颈动脉管外口等结
构
5颅底内面观:由前向后分三个窝。
(1)颅前窝
(2)颅中窝
(3)颅后窝
第二课时
上肢骨及其连接
(一)上肢骨:每侧共32块前后两面:前面为肩胛下窝、后面有肩胛冈、末端为肩峰;
肱骨体部,有桡神经沟;下端,有肱骨小头、肱骨滑车、内上髁、外侧髁。
4、桡骨:上端有桡骨头、关节凹、下方为桡骨颈、下端膨大,有腕关节面,内侧面有尺切迹,外侧为茎突
5、尺骨:上端膨大,前面为滑车切迹,后方为鹰嘴,前下方为冠突,下端有尺骨头,后内侧的为茎突。
6、手骨:(1)腕骨:共8块短骨,分别为舟月三角豆,大小头状钩;(2)掌骨:共5块,为长骨,为第1~5掌骨。(3)指骨:共14块,为长骨,拇指为2块,其余各指均为3块,分别为近节、中节和远节指骨。
5、足关节:包括距小腿关节、跗骨间关节、跗跖关节、跖趾关节和趾骨间关节。
距小腿关节(踝关节)由胫、腓骨的下端和距骨组成,可作背屈(伸)和跖屈(屈)运
动,与跗骨间关节协同作用时,可使足内翻和外翻。
6、足弓:足骨借关节和韧带紧密相连,在纵、横方向上都形成凸向上方的弓形,称足弓。
《功能解剖生理学》第四章运动系统 学习目标

《功能解剖生理学》第四章运动系统学习目标1.熟悉人体运动的基本形式和运动学中的基本概念。
2.掌握人体运动中的杠杆原理及在康复医学中的应用。
3.熟悉人体动力学相关概念,了解牛顿运动定律及其应用。
4.了解人体运动耐量试验相关概念。
5.了解静力学及其研究内容,熟悉人体平衡的条件。
6.掌握骨的形态、分类,骨的构造和功能。
7.熟悉骨的化学成分和物理特性,骨的代谢与钙化,骨的血液供应。
8.了解骨的生长。
9.掌握中轴骨骼的组成,椎骨的一般形态结构及各种椎骨的结构特点。
10.掌握颅骨的组成,熟悉颅骨的形态特点。
11.了解颅顶骨及颅底的结构特点和临床意义。
12.熟悉颅的整体观及新生儿颅的特征及其生后变化。
13.掌握附肢骨骼的组成,上肢骨和下肢骨的组成及其形态特点。
14.熟悉骨的承载能力,载荷及变形,应力与应变。
15.掌握骨组织的生物力学特性及骨折的类型。
16.熟悉骨质疏松症与运动防治。
17.掌握直接骨连接和间接骨连接的形式与结构特点。
18.掌握关节的分类与辅助结构,关节的稳定性与灵活性。
19.熟悉关节的活动轴与自由度,关节的润滑。
20.掌握关节的力学特性及制动及运动对关节软骨的影响。
21.掌握椎体间的连接形式及结构特点。
22.熟悉脊柱和胸廓的组成,整体观及其运动形式。
23.掌握颅骨的连接形式,颞下颌关节的组成、结构特点及运动形式。
24.掌握肩关节、肘关节、桡关节和拇指腕掌关节的组成,结构特点及运动形式。
25.掌握骨盆、髋关节、膝关节、踝关节和足弓的组成、结构特点与运动形式。
26.熟悉耻骨联合、骶髂关节的组成、运动。
27.熟悉男女骨盆的性别差异。
28.掌握肌的功能解剖。
29.熟悉肌力的区分及影响肌力的影响。
30.了解肌肉训练的原则。
31.熟悉肌的协同作用。
32.了解肌运动的适应性。
33.熟悉韧带和肌腱的生物力学基础。
34.了解肌的形态与结构,肌的辅助装置。
35.熟悉肌的起止、作用与配布。
36.掌握人体各部位主要骨骼肌的起止点、结构及功能。
人体解剖生理学:第四章 运动系统结构与功能

•长 骨
骨干:内有髓腔,容 纳骨髓。
骺: 有关节软骨, 构成关节面。
青少年时骺与骨干之 间有骺软骨。
一、 骨
3、骨的结构 ◆骨膜:分纤维层和 成骨层两层。 ◆骨质:分密骨质和 松骨质。 ◆骨髓:分为红骨髓 和黄骨髓。 ◆骨的血管、淋巴管 和神经。
(3)功能
支持体重、保护脊髓和运动。
2、胸廓
(1)组成
胸廓由12个胸椎、1块胸骨和 12对肋借关节和韧带连结而成。
(2)形态
成人胸廓圆锥形,上、下口,横 径、左右径
(3)功能
保护功能,胸式呼吸。
(1)胸骨
胸骨可分为胸骨柄、胸骨体和剑突 三部分。
胸骨柄上缘正中有颈静脉切迹,是针 灸取“天突穴”的骨性标志。
囊内有前、后交叉韧带加强 囊外有胫、腓侧副韧带、 髌韧带加强 运动:屈、伸、半屈位时可旋转
(二) 自由下肢骨
•股骨 股骨头 股骨颈 大转子 小转子 转子间线 转子间嵴 外侧髁 内侧髁 外上髁 内上髁 收肌结节
•髌骨 •胫骨
内侧髁 外侧颗 髁间隆起 胫骨粗隆 内踝 腓切迹
•腓骨 腓骨头
腓骨颈
外踝
•足骨
不成对 犁骨、舌骨
髁突 下颌支 下颌角
下颌骨 mandible
冠突 下颌孔
颏孔
下颌体
舌骨 hyoid bone
大角 小角
舌骨体
人字缝 矢状缝
冠状缝
枕骨 顶孔 顶骨
颅的顶面
额骨
顶骨 下颞线
颞骨 人字缝 外耳门
枕骨 乳突
冠状缝 额骨 上颞线
翼点 蝶骨大翼
泪骨 颧骨
第四章 运动系统

第 1 颈椎,又称寰椎 横突孔 齿突 特点:环形,无椎体、棘突。 棘突 第 7颈椎,又称隆椎 上关节面 构成:前弓、后弓和两个侧块。 特点:棘突长且不分叉, 上关节面、下关节面、齿突凹 横突孔 末端呈结节状
棘突
椎下切迹
活体易触及, 第 2 颈椎,又称枢椎 为计数椎骨的标志 特点:有齿突。
下关节突 椎 孔 棘突 第 7 颈椎(隆椎) 枢椎
椎 孔
(4)骶骨 sacrum
5 块骶椎融合而成,呈三角形,略弯曲。 一底: 连第5腰椎;骶骨岬 一尖: 连尾骨 产科骨盆测量重要标志之一 骶管 上:连椎管 一管: 下:胝管裂孔,骶角 盆面:光滑微凹。骶前孔4 对,通骶管 临床的骶管麻醉常以此 两面: 为确定胝管裂孔的标志。 背侧面:粗糙隆凸骶后孔4 对kull) 构成:23 块颅骨(中耳的3对听小骨除外) 形态:扁骨和不规则骨 分部: 脑颅:位于颅的后上部,包括一盖(颅盖) 一底(颅底),内有颅腔,容纳脑 面颅:位于颅的前下部,参与围成眶腔、鼻 腔、口腔
(一)脑颅
额骨 筛骨
8 块脑颅骨共同构 成颅腔,支持和保 护脑: 额骨 筛骨 各一块 蝶骨 枕骨 颞骨 各两块 顶骨
次 级 骨化中心
干骺端
原始(初级) 骨化中心
体(骨干)
骺软骨 次 级 骨化中心
干骺端
骺
(五)骨的连接:骨与骨之间的连接装置
分类: 1.直接连接,骨与骨之间借助致密 结缔组织、软骨或骨直接相连,期 间无间隙 特点:运动性小或完全不运动, 如颅骨连接、椎间盘等
结构:结缔组织附于关节表 结构:一凸一凹,表面有关 面形成的膜性囊,外层为纤 节软骨。 2、间接连接(滑膜关节或关节): 维膜(厚而坚韧),内层为 结构:关节囊的滑膜和关节 关节软骨的作用:减少关节 骨与骨之间借助膜性的结缔组织囊 滑膜(薄而柔软) 软骨围城的密闭腔隙,内含 运动时的摩擦和冲击 相连,骨面之间有空隙 滑液 滑膜的作用:产生滑液,润 滑关节和营养关节软骨 作用:腔内负压,有助于关 关节面 节的稳固 关节的结构 关节囊 关节腔
教科版《我们的身体》教案

教科版《我们的身体》教案一、教学内容本节课的教学内容选自教科版《我们的身体》第四章“人体运动系统”。
具体包括:1. 骨、关节、骨骼肌的结构和功能;2. 骨连结和运动的产生;3. 骨骼肌的收缩和舒张;4. 关节的基本类型及功能。
二、教学目标1. 让学生了解人体运动系统的组成,掌握骨、关节、骨骼肌的结构和功能。
2. 培养学生对人体运动产生过程的理解,明白骨连结和运动的关系。
3. 引导学生掌握骨骼肌的收缩和舒张原理,并能应用于实际生活中。
三、教学难点与重点重点:骨、关节、骨骼肌的结构和功能;骨连结和运动的产生;骨骼肌的收缩和舒张。
难点:关节的基本类型及功能;骨骼肌的收缩和舒张原理。
四、教具与学具准备教具:多媒体课件、人体运动系统模型、骨骼肌演示道具。
学具:笔记本、彩色笔。
五、教学过程1. 实践情景引入:让学生观察教室里的同学在做运动时的动作,引导他们思考运动是如何产生的。
2. 知识点讲解:(1)介绍人体运动系统的组成,展示多媒体课件,让学生了解骨、关节、骨骼肌的结构和功能。
(2)讲解骨连结和运动的产生过程,引导学生理解关节的作用。
(3)讲解骨骼肌的收缩和舒张原理,演示骨骼肌演示道具,让学生直观地感受骨骼肌的运动。
3. 例题讲解:分析生活中常见的运动动作,如走路、跑步、弯腰等,让学生明白这些动作的产生原理。
4. 随堂练习:让学生结合所学内容,分析自己或其他同学在做运动时的动作,并简要描述运动产生的过程。
六、板书设计板书内容:人体运动系统骨、关节、骨骼肌骨连结和运动骨骼肌的收缩和舒张七、作业设计1. 描述骨、关节、骨骼肌的结构和功能。
2. 解释骨连结和运动的产生过程。
3. 阐述骨骼肌的收缩和舒张原理,并给出实际生活中的应用实例。
八、课后反思及拓展延伸本节课通过观察实际运动情景,引导学生思考运动产生的原因,让学生掌握了人体运动系统的相关知识。
在教学过程中,注意运用多媒体课件、模型等教具,使学生能够更直观地了解骨、关节、骨骼肌的结构和功能。
2024年幼儿生长发育课件

2024年幼儿生长发育课件一、教学内容本课件依据《幼儿生长发育》教材第四章“幼儿身体各系统发育特点”展开,详细内容涉及幼儿运动系统、神经系统、心血管系统、呼吸系统、消化系统及免疫系统等主要生理系统的发育特点、影响因素及促进措施。
二、教学目标1. 理解幼儿各生理系统的基本发育特点及其在成长过程中的重要性。
3. 学会通过科学的锻炼和合理的饮食调节,提高幼儿身体素质,预防疾病。
三、教学难点与重点重点:幼儿各生理系统的发育特点及其保健措施。
难点:如何针对幼儿生理特点制定合理的锻炼和饮食计划,促进幼儿健康成长。
四、教具与学具准备1. 教具:幼儿生长发育模型、PPT课件、挂图。
2. 学具:记录本、彩笔、身高尺、体重秤。
五、教学过程1. 实践情景引入(5分钟)通过展示幼儿生长发育模型,让学生观察并讨论幼儿在不同年龄阶段的身体变化。
2. 理论讲解(15分钟)结合PPT课件,讲解幼儿各生理系统的发育特点,让学生了解影响幼儿生长发育的因素。
3. 例题讲解(10分钟)分析具体案例,让学生了解如何通过科学锻炼和饮食调节促进幼儿身体健康成长。
4. 随堂练习(10分钟)学生分组讨论,针对不同年龄阶段的幼儿设计合理的锻炼和饮食计划。
六、板书设计1. 《幼儿生长发育》第四章:幼儿身体各系统发育特点2. 主要内容:运动系统发育特点神经系统发育特点心血管系统发育特点呼吸系统发育特点消化系统发育特点免疫系统发育特点七、作业设计1. 作业题目:根据本次课程内容,为36岁的幼儿设计一份科学的锻炼和饮食计划。
2. 答案:(1)锻炼计划:每天进行1小时户外活动,包括跑步、跳跃、投掷等全身运动。
(2)饮食计划:保证营养均衡,多吃蔬菜水果、粗粮、瘦肉等食物,减少油腻、甜食等摄入。
八、课后反思及拓展延伸1. 反思:本次课程是否能够帮助学生深入了解幼儿生长发育的特点,提高他们关爱幼儿健康的意识。
2. 拓展延伸:鼓励学生在课后查阅相关资料,了解更多关于幼儿生长发育的知识,为今后从事幼儿教育工作打下基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014年6月26日星期四
33
4.3.2 人体运动的范围
人体运动的范围通常受到两个因素的影响:人的尺 寸和关节活动的范围。关节活动的范围通常用关节运动 的角度来表现。
2014年6月26日星期四
34
4.3.2 人体运动的范围
人体运动的范围通常受到两个因素的影响:人的尺 寸和关节活动的范围。关节活动的范围通常用关节运动 的角度来表现。
2014年6月26日星期四
31
4.3.1 人体运动的种类
(3)环转运动:指整根骨头绕骨的一个端点,并与骨 成一定角度的轴作旋转运动,运动的轨迹有点象一个圆 锥体的图形。
2014年6月26日星期四
32
4.3.2 人体运动的范围
人体运动的范围通常受到两个因素的影响:人的尺 寸和关节活动的范围。关节活动的范围通常用关节运动 的角度来表现。
2. 反射 (1) 反射(Reflex)就是在中枢神经系统的参与下, 机体对外界刺激所作的有规律的反应。
反射弧
2014年6月26日星期四
8
5.1.2 肌肉收缩的神经控制
2. 反射 (2) 反射过程。
刺激
感受器
神经冲动
反射中枢
运动指令
感受体验
大脑皮层
动作
效应器
2014年6月26日星期四
9
4.1.3 肌肉施力
2014年6月26日星期四
37
4.3.3 人体运动的时间
人体运动的时间是从运动开始到运动结束的时间。 人体运动的时间主要依赖于运动方向、运动距离、动作
特点、动作轨迹特征、负荷重量和运动精确性。
1. 运动方向。 研究的结果表明:
通过屈肘控制手臂的运
动,在左下方和右上方 能够运动更快。
2014年6月26日星期四
4. 减少静态施力的设计 实例4: 如果会造成抬手作业,通常应该设计手臂、脚支撑, 避免静态施力。
2014年6月26日星期四
21
4.2 骨和关节运动
4.2.1 骨的结构和功能
骨是人体内部最坚固的组织。人体
共有206块骨,约占人体体重的1/10-1/5。 骨按其所在部位可以分为颅骨、躯干骨 和四肢骨。
38
4.3.3 人体运动的时间
人体运动的时间是从运动开始到运动结束的时间。 人体运动的时间主要依赖于运动方向、运动距离、动作 特点、动作轨迹特征、负荷重量和运动精确性。
1. 运动方向。
不同区域内手指敲击运动速度差异
2014年6月26日星期四
39
4.3.3 人体运动的时间
2. 动作特点。
动作部位 动作特点/动作轨迹特征
大小应该低于肌肉最大肌
力的15%。
பைடு நூலகம்
2014年6月26日星期四
16
4.1.3 肌肉施力
4. 减少静态施力的设计 减少静态施力最重要的就是要避免不“自然”的身 体姿势。
2014年6月26日星期四
17
4.1.3 肌肉施力
4. 减少静态施力的设计 案例1:钳子的设计。
2014年6月26日星期四
18
4.1.3 肌肉施力
2014年6月26日星期四
35
4.3.2 人体运动的范围
人体运动的范围通常受到两个因素的影响:人的尺
寸和关节活动的范围。关节活动的范围通常用关节运动
的角度来表现。
2014年6月26日星期四
36
4.3.2 人体运动的范围
人体运动的范围通常受到两个因素的影响:人的尺 寸和关节活动的范围。关节活动的范围通常用关节运动 的角度来表现。
力的大小(N)
男 370 390 女 200 220
左
右 左 右
280
290 280 290
130
130 200 210
左
右 左 右
210
230 100 120
170
180 80 90
背部肌肉(躯干屈伸的肌肉)
2014年6月26日星期四
1220
710
49
2. 手的力量
手的力量与运动方向、角度以及肘关节的角度等有 密切关系。表3-7.
人 机 工 程 学
教师:廖 敏
机械工程与自动化学院
第四章 人的运动系统及其设计
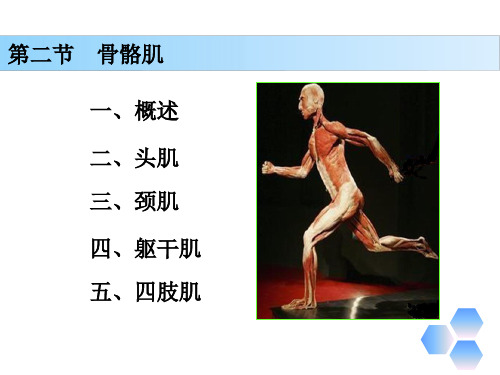
4.1 肌肉
4.2 骨和关节运动
4.3 人体运动特征 4.4 人的操作动作分析
4.5 控制设计
2014年6月26日星期四
2
4.1 肌肉
4.1.1 肌肉的生理特征 1. 肌肉结构
2014年6月26日星期四
3
4.1.1 肌肉的生理特征
2. 盲目定位运动的准确性。
结论:正前方准确性最高,右方稍优于左方;同一方位下,下 和中优于上方。
2014年6月26日星期四
44
4.3.4 人体运动的精度
3. 运动方向与准确性。
结论:在垂直面上,手臂上下运动更稳定,颤抖方向上下。在 水平面上,手臂左右方向更稳定,颤抖方向也为左右方向。
2014年6月26日星期四
2014年6月26日星期四
54
4.3.6 肢体的动作速度与频率
决定于肢体肌肉收缩速度、运动方向和动作轨迹等。 表3-10 人体各部位动作速度与频率限度
动作部位 手的运动/(cm· s-1) 控制操纵杆位移/(cm· s-1) 手指敲击的最大频率/(次· s-1) 旋转把手与驾驶盘/(r· s-1) 身体转动/(次· s-1) 手控制的最大谐振截止频率/(Hz) 手的弯曲与伸直/(次· s-1) 脚掌与脚的运动/(次· s-1)
运动单位电位
肌电图
2014年6月26日星期四
6
4.1.2 肌肉收缩的神经控制
1. 肌肉收缩与神经控制 • 肌肉收缩取决于肌纤维收缩,而肌纤维收缩是由神经 冲动引起的。 • 肌肉的神经控制是通过联系肌肉和中枢神经的运动神 经和感觉神经来实现的。
2014年6月26日星期四
7
4.1.2 肌肉收缩的神经控制
45
4.3.4 人体运动的精度
4. 操作方式与准确性。
好
不好
2014年6月26日星期四
46
4.3.5 人体力量
人体力量根据肌肉产生的位移的情况可以分为静态 力量和动态力量。 • 静态力量是人体保持特定姿势或固定位置需要的力量。 • 动态力量是人体位置或姿势发生变化时动作的力量。
2014年6月26日星期四
3. 目标距离。 随着目标距离增加,定位运动时间增长;随着目标 宽度增加,定位运动时间缩短。
2014年6月26日星期四
41
4.3.3 人体运动的时间
4. 动作轨迹特征。 (1)连续改变和突然改变的曲线式动作,前者速度快,后 者速度慢; (2)水平动作比垂直动作的速度快; (3)一直向前的动作速度,比旋转式的动作速度快1.5~2倍 左右; (4)圆形轨迹的动作比直线轨迹动作灵活。
相似,叫做骨杠杆。
(1)示例2:
2014年6月26日星期四
26
4.2.2 骨杠杆
骨杠杆分类: 骨杠杆一般可以分为三类:平衡杠杆、省力杠杆和速度 杠杆。
2014年6月26日星期四
27
4.3人体运动特征
4.3.1 人体运动的种类 (1)角度运动:角度运动包括伸展和弯曲。
2014年6月26日星期四
28
4.3.1 人体运动的种类
(1)角度运动:角度运动包括伸展和弯曲。
2014年6月26日星期四
29
4.3.1 人体运动的种类
(2)旋转运动:骨绕垂直轴的运动叫做旋转运动。
2014年6月26日星期四
30
4.3.1 人体运动的种类
(3)环转运动:指整根骨头绕骨的一个端点,并与骨 成一定角度的轴作旋转运动,运动的轨迹有点象一个圆 锥体的图形。
2014年6月26日星期四
动作速度与频率 35 8.8~17 3~5 9.42~29.46 0.72~1.62 0.8 1~1.2 0.36~0.72
55
4.4人的操作动作分析
动作分析就是指作业或操作的动作组成、结构特点
及其相互关系的分析。
动作研究一般从宏观(生产过程:流程、工艺、人、 机器)和微观(操作动作)两个层次展开。 目的: (1)宏观:建立过程间、机器与人作业间等的最
2014年6月26日星期四
50
2. 手的力量
立姿弯臂时的力量分布
2014年6月26日星期四
51
2. 手的力量
立姿直臂时的力量分布
2014年6月26日星期四
52
3. 脚的力量
脚的力量与下肢的姿势、位置和方向有关。
2014年6月26日星期四
53
4. 耐力
人在一定时间里保持某种用力水平的能力叫做耐力。 人体的耐力和瞬时的力量大小不存在比例关系。 肢体所有力量的大小,都与持续时间有关。例如拉 力由最大值减到1/4时,只需要4分钟。
(5)顺时针动作比逆时针动作灵活;
(6)手向着身体的动作比离开身体的动作灵活; (7)向前后的往复动作比向左右的往复动作速度快。
2014年6月26日星期四
42
4.3.4 人体运动的精度
与运动时间、运动种类、运动方向和操作方式等有关。 1. 运动速度与准确性。
2014年6月26日星期四
43
4.3.4 人体运动的精度
4. 减少静态施力的设
计
案例2:避免长时 间地抬手作业,是减 少静态施力设计的重 要内容。
2014年6月26日星期四
19
4.1.3 肌肉施力
4. 减少静态施力的设计 实例3: 当手不得不在较高位 置作业时,应该使用支承
物来托住人的前臂、关节
或手。
2014年6月26日星期四
20
4.1.3 肌肉施力