双闭环串级调速
晶闸管串级调速双闭环系统方案

晶闸管串级调速双闭环系统方案晶闸管串级调速双闭环系统是一种常用的电力传动系统,广泛应用于工业生产中。
它通过晶闸管的调速和闭环控制,能够实现对电机转速的精确控制,提高系统的稳定性和可靠性。
下面将详细介绍晶闸管串级调速双闭环系统的方案。
1.系统结构2.系统原理(1)速度闭环:系统首先通过速度传感器测量电机的转速,将实际转速与给定转速进行比较,得到速度误差信号。
然后将速度误差信号通过比例积分控制器进行处理,得到电机的转速控制信号。
最后,转速控制信号经过PWM调制器和晶闸管触发控制电路,实现对晶闸管的控制,从而控制电机的转速。
(2)电流闭环:系统通过电流传感器测量电机的输出电流,将实际电流与给定电流进行比较,得到电流误差信号。
然后将电流误差信号通过比例积分控制器进行处理,得到电机的电流控制信号。
最后,电流控制信号经过PWM调制器和晶闸管触发控制电路,实现对晶闸管的控制,从而控制电机的输出电流。
3.系统参数设计为了保证系统的稳定性和可靠性,需要根据实际需求对系统的参数进行设计。
主要设计参数包括速度闭环的比例系数Kp1和积分时间常数Ti1,以及电流闭环的比例系数Kp2和积分时间常数Ti2(1)速度闭环参数设计:根据实际需求确定速度闭环的比例系数Kp1和积分时间常数Ti1、一般情况下,比例系数Kp1的值越大,系统的响应速度越快但稳定性越差;积分时间常数Ti1的值越大,系统对于长期速度误差的补偿能力越强但抗干扰能力越差。
因此,需要在速度响应速度和稳定性之间进行权衡,选择合适的参数。
(2)电流闭环参数设计:根据实际需求确定电流闭环的比例系数Kp2和积分时间常数Ti2、一般情况下,比例系数Kp2的值越大,系统的响应速度越快但稳定性越差;积分时间常数Ti2的值越大,系统对于长期电流误差的补偿能力越强但抗干扰能力越差。
因此,需要在电流响应速度和稳定性之间进行权衡,选择合适的参数。
4.系统优化设计为了进一步提高系统的性能和可靠性,可以对晶闸管串级调速双闭环系统进行优化设计。
双闭环串级调速

双闭环控制的串级调速系统由于串级调速系统机械特性的静差率较大,所以开环控制系统只能用于对调速精度要求不高的场合。
为了提高静态调速精度,并获得较好的动态特性,须采用闭环控制,通常采用具有电流反馈与转速反馈的双闭环控制方式。
由于串级调速系统的转子整流器是不可控的,系统本身不能产生电气制动作用,所谓动态性能的改善只是指起动与加速过程性能的改善,减速过程只能靠负载作用自由降速。
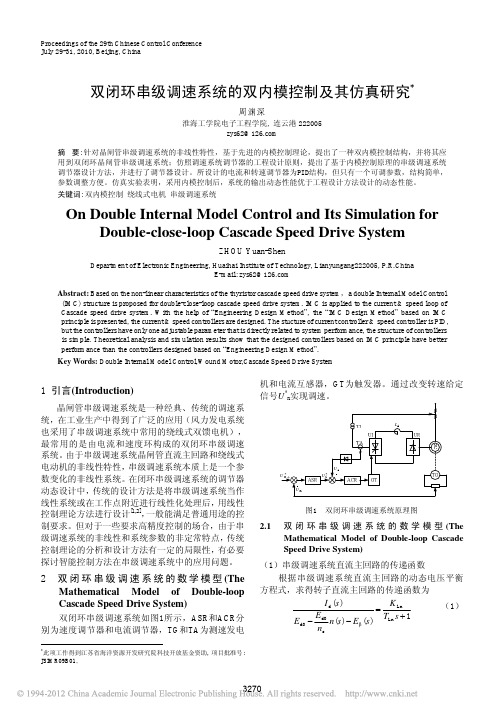
1. 双闭环控制串级调速系统的组成图1 所示为双闭环控制的串级调速系统原理图。
图中,转速反馈信号取自异步电动机轴上连接的测速发电机,电流反馈信号取自逆变器交流侧的电流互感器,也可通过霍尔变换器或直流互感器取自转子直流回路。
为了防止逆变器逆变颠覆,在电流调节器ACR输出电压为零时,应整定触发脉冲输出相位角为。
图1 所示的系统与直流不可逆双闭环调速系统一样,具有静态稳速与动态恒流的作用。
所不同的是它的控制作用都是通过异步电动机转子回路实现的。
2. 串级调速系统的动态数学模型在图1 所示的系统中,可控整流装置、调节器以及反馈环节的动态结构框图均与直流调速系统中相同。
在异步电动机转子直流回路中,不少物理量都与转差率有关,所以要单独处理。
(1) 转子直流回路的传递函数根据图2 的等效电路图可以列出串级调速系统转子直流回路的动态电压平衡方程式式中U d0 ——当 s=1 时转子整流器输出的空载电压,U i0——逆变器直流侧的空载电压,;L——转子直流回路总电感,L = 2L D + 2L T + L LL D——折算到转子侧的异步电动机每相漏感,;L T——折算到二次侧的逆变变压器每相漏感,;LL ——平波电抗器电感;R ——转差率为 s 时转子直流回路等效电阻,。
于是,式(1)可改写成将式(2)两边取拉氏变换,可求得转子直流回路的传递函数式中T Lr ——转子直流回路的时间常数,;K i ——转子直流回路的放大系数,。
转子直流回路的动态结构框图如图3所示。
基于Matlab的双闭环串级调速系统设计毕业论文
n
转 负 馈 速 反
β
1+Tois
电 反 滤 器 流 馈 波
α
1+Tons
转 反 滤 器 速 馈 波
上图为双闭环串级调速系统的动态结构图
4、仿真结果
(1)给定输入为阶跃响应 从右图仿真结果可以 看出,稳态时仿真系 统的实际转速能够实 现对给定转速的良好 跟随,且稳态无静差。
(2)给定输入为斜坡信号 从右图的仿真波形 可以看出,仿真系 统对斜坡信号的稳 态和动态跟踪性都 比较好。
M
if
Id
二、串级调速系统的机械特性与最大转矩 因转子整流器有第一和第二工作状态, 因转子整流器有第一和第二工作状态,所以串调系统机 械特性也有第一和第二两个工作区。 械特性也有第一和第二两个工作区。 串调系统的额定工作点位于机械特性第一工作区; 串调系统的额定工作点位于机械特性第一工作区;串调 系统在该区的过载能力比绕线式异步电机固有特性的过载 能力降低了17%左右。而最大转矩发生在第二工作区。 能力降低了 %左右。而最大转矩发生在第二工作区。
第二章绕线式异步电动机串级调速 第二章绕线式异步电动机串级调速 原理及特性分析
一、串级调速系统原理分析 1、交流调速系统的分类 、 从交流电机转速表达式: 从交流电机转速表达式: n =
60 f 1 (1 − s ) p
可归纳出三类调速方法: 可归纳出三类调速方法: 变极对数p的调速、变转差率 调速及变电源频率 调速。 调速及变电源频率f 变极对数 的调速、变转差率s调速及变电源频率 1调速。 的调速
2、串级调速原理 、 在转子回路中串入与转子电势同频率的附加电势, 在转子回路中串入与转子电势同频率的附加电势, 通过改变附加电势的幅值和相位实现调速。 通过改变附加电势的幅值和相位实现调速。如在转 子回路中引入一个频率与转子电势相同, 子回路中引入一个频率与转子电势相同,而相位相 反的附加电动势时, 反的附加电动势时,由 sE 20 − Ef I2 = r 2 2 + (sX 20) 2 可见,改变 的大小 的大小, 可见,改变Ef的大小,可使电动机在同步转速以下 调速,即得到低于同步转速的速度, 调速,即得到低于同步转速的速度,故称为次同步 串级调速。 串级调速。
6.2双闭环三相异步电动机串级调速系统

6.2 双闭环三相异步电动机串级调速系统一.实验目的1.熟悉双闭环三相异步电动机串级调速系统的组成及工作原理。
2.掌握串级调速系统的调试步骤及方法。
3.了解串级调速系统的静态与动态特性。
二.实验内容1.控制单元及系统调试2.测定开环串级调速系统的静特性。
3.测定双闭环串级调速系统的静特性。
4.测定双闭环串级调速系统的动态特性。
三.实验系统组成及工作原理绕线式异步电动机串级调速,即在转子回路中引入附加电动势进行调速。
通常使用的方法是将转子三相电动势经二极管三相桥式不控整流得到一个直流电压,再由晶闸管有源逆变电路代替电动势,从而方便地实现调速,并将能量回馈至电网,这是一种比较经济的调速方法。
本系统为晶闸管亚同步闭环串级调速系统。
控制系统由速度调节器ASR,电流调节器ACR,触发装置GT,脉冲放大器MF,速度变换器FBS,电流变换器FBC等组成,其系统主回路原理图如图1-2所示,控制回路原理图可参考图1-1b所示。
四.实验设备和仪器1.电源控制屏(NMCL-32);2.低压控制电路及仪表(NMCL-31);3.触发电路和晶闸管主回路(NMCL—33);4.可调电阻(NMEL—03);5.直流调速控制单元(NMCL—18);6.电机导轨及测速发电机(或光电编码器);7.直流发电机M03;8.线绕电动机M09;9.双踪示波器;10.万用表;五.注意事项1.本实验是利用串调装置直接起动电机,不再另外附加设备,所以在电动机起动时,必须使晶闸管逆变角β处于βmin位置。
然后才能加大β角,使逆变器的逆变电压缓慢减少,电机平稳加速。
2.本实验中,α角的移相范围为90°~150°,注意不可使α<90°,否则易造成短路事故。
3.接线时,注意绕线电机的转子有4个引出端,其中1个为公共端,不需接线。
4.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的RP3电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR的“5”、“6”端接入可调电容(预置7μF)。
双闭环控制的串级调速系统仿真模型的建立与分析

良好 的调 速性 能 。串级 调速 的关 键 点不 是去 控制 电动机 I 速 反 馈 信 号 取 自与异 步 电动 机 同轴 连 接 的测 速 发 电机
A。 的定子侧 ,而是控制电动机的转子侧 ,由于串级调速装 l T G,电流 反馈信 号 取 自逆 变器 交流 侧 的 电流互 感器 T 的值 ,可 以实 现 调速 。为 防 置承 受 的是转 子 回路低 得多 的 电压 和较 电机 额定 功 率小 : 通 过改 变 转 速 给定 信 号 U 得 多的转 差功 率 ,所 以高压 串级调 速 的经济 性 明显 优 于 I
图 4 突 加 给 定 时 转 速 n的 波 形 ( = V) U锄 5
Fi 4 Rot i g. atona pe d ls e wav f r t udde g v n i na e o m wih s n i e sg l
( )抗扰 仿 真 。给定 信号 U = V,在 带 负载起 动 情 2 5
0 引言
I f M、
速 系统 框 图如 图 1 示 。它 主要有 绕线 转子 异 步 电动机 所 相 桥 式二 极 管 整 流 器 U R、 相 桥 式 晶 闸 管 有 源
I I 交流 串级 调速 是利 用在 电动机 转子 中 串入 附加 电动 l 逆 变 器 U 、逆 变 变 压 器 T 、触 发 装 置 、电 流 调 节 器 S 势 ,以改 变转 差功 率从 而 实现 转速 调节 。具 有 高效 率和 ‘ A R、速 度调 节器 A R和信号 检测 等部 分组成 。图 中转 C
图 5 突 加 负 载 时 n的 波 形 ( 5 U V)
Fi . Ro a i n l p e v f r wih s d e a g5 t t a e d wa e o m t u d n l d o s o
双闭环串级调速系统的双内模控制及其仿真研究_周渊深
双闭环串级调速系统的双内模控制及其仿真研究*周渊深淮海工学院电子工程学院, 连云港 222005zys62@摘要: 针对晶闸管串级调速系统的非线性特性,基于先进的内模控制理论,提出了一种双内模控制结构,并将其应用到双闭环晶闸管串级调速系统;仿照调速系统调节器的工程设计原则,提出了基于内模控制原理的串级调速系统调节器设计方法,并进行了调节器设计。
所设计的电流和转速调节器为PID结构,但只有一个可调参数,结构简单,参数调整方便。
仿真实验表明,采用内模控制后,系统的输出动态性能优于工程设计方法设计的动态性能。
关键词: 双内模控制绕线式电机串级调速系统On Double Internal Model Control and Its Simulation for Double-close-loop Cascade Speed Drive SystemZHOU Yuan-ShenDepartment of Electronic Engineering, Huaihai Institute of Technology, Lianyungang222005, P.R.ChinaE-mail: zys62@Abstract: Based on the non-linear characteristics of the thyristor cascade speed drive system,a double Internal Model Control (IMC) structure is proposed for double-close-loop cascade speed drive system. IMC is applied to the current & speed loop of Cascade speed drive system. With the help of “Engineering Design Method”, the “IMC Design Method”based on IMC principle is presented, the current & speed controllers are designed. The stucture of current controller & speed controller is PID, but the controllers have only one adjustable parameter that is directly related to system performance, the structure of controllers is simple.Theoretical analysis and simulation results show that the designed controllers based on IMC principle have better performance than the controllers designed based on “Engineering Design Method”.Key Words: Double Internal Model Control,Wound Motor,Cascade Speed Drive System1 引言(Introduction)晶闸管串级调速系统是一种经典、传统的调速系统,在工业生产中得到了广泛的应用(风力发电系统也采用了串级调速系统中常用的绕线式双馈电机),最常用的是由电流和速度环构成的双闭环串级调速系统。
双闭环串级

双闭环控制的串级调速系统3. 调节器参数的设计双闭环控制串级调速系统的动态校正一般主要按抗扰性能考虑,即应使系统在负载扰动时有良好的动态响应。
在采用工程设计方法进行动态设计时,可以像直流调速系统那样,电流环按典型I型系统设计,转速环按典型Ⅱ型系统设计。
但是串级调速系统中转子直流回路的时间常数 T Lr及放大系数 K Lr 都是转速的函数,而异步电动机的机电时间常数 T M又是转速和电流的函数,这就给调节器的设计带来一定的困难。
具体设计时,可以先在确定的转速 n 和负载电流 I d的前提下,求出各传递函数中的参数。
例如,按照要求的最大转差率S m ax或平均转差率1/2S m ax来确定转速,按额定负载或常用的实际负载来选定电流,然后按定常系统进行设计。
如果用模拟控制系统实现,则当实际转速或电流改变时,系统的动态性能就要变坏。
如果采用微机数字控制,可以按照不同的转速和电流事先计算好参数的变化,用表格的方式存入微机,实时控制时可根据检测得到的转速和电流查表调用,就可以得到满意的动态特性。
4. 串级调速系统的起动方式串级调速系统是依靠逆变器提供附加电动势而工作的,为了使系统工作正常,对系统的起动与停车控制必须有合理的措施予以保证。
总的原则是在起动时必须使逆变器先于电机接上电网,停车时则比电机后脱离电网,以防止逆变器交流侧断电,而使晶闸管无法关断,造成逆变器的短路事故。
串级调速系统的起动方式通常有间接起动和直接起动两种。
(1) 间接起动大部分采用串级调速的设备是不需要从零速到额定转速作全范围调速的,特别对于风机、泵、压缩机等机械,其调速范围本来就不大,串级调速装置的容量可以选择比电动机小得多。
为了使串级调速装置不受过电压损坏,须采用间接起动方式,即将电动机转子先接入电阻或频敏变阻器起动,待转速升高到串级调速系统的设计最低转速时,才把串级调速装置投人运行。
由于这类机械不经常起动,所用的起动电阻等都可按短时工作制选用,容量与体积都较小。
实验三 双闭环三相异步电动机串级调速系统 实验
实验三双闭环三相异步电动机串级调速系统实验一.实验目的⒈ 熟悉双闭环三相异步电动机串级调速系统的组成、工作原理、调试方法。
⒉ 了解双闭环三相异步电动机串级调速系统的静态和动态特性。
二.实验设备⒈ MCL – 31 低压控制电路及仪表。
⒉ MCL – 32 电源控制屏。
⒊ MCL – 33 触发电路及晶闸管主回路。
⒋ MEL – 03 三相可调电阻器。
⒌ MEL – 11 电容箱。
⒍ 绕线式异步电动机–直流电动机–测速机组。
⒎ 万用表。
⒏ 双踪示波器。
三.实验原理众所周知,在绕线转子异步电动机的转子侧引入一个可控的附加电动势,就可调节电动机的转速。
但由于电动机转子回路感应电动势E r 的频率随转差率而变化,所以附加电动势的频率亦必须随电动机转速而变化。
这就相当于在转子侧加入一个可变压变频的装置。
实际系统中是将转子交流电动势整流成直流电动势,然后再引入一个附加的直流电动势,控制此附加直流电动势的幅值,就可以调节异步电动机的转速。
这样就把交流变压变频的复杂问题,转化为与频率无关的直流变压问题,对问题的分析与工程实现都方便多了。
对于附加的直流电动势,较好的方案是采用工作在有源逆变状态的晶闸管可控整流装置,它既能够平滑的调节电压,以满足对电动机转速平滑调节的要求,从节能的角度又能够吸收从异步电动机转子侧传递来的转差功率并加以利用。
绕线转子异步电动机电气串级调速系统原理图如下图所示。
电气串级调速系统原理图四.实验内容⒈ 控制单元调试在主电路切断电源的情况下,进行控制单元调试。
⑴ 转速调节器( ASR )输出正、负限幅值的调试使转速调节器为 PI 调节器,将 MCL – 31 的给定端 U g 与转速调节器的“ 2 ” 端相接,接通控制电路电源﹙红色指示灯亮﹚。
分别加入一定的正、负输入电压,调节转速调节器的正、负限幅电位器 RP1 、 RP2 ,使转速调节器输出正、负限幅值等于± 5V 。
⑵ 电流调节器输出控制角 a 的调试使电流调节器为 PI 调节器,将 MCL – 31 的给定端 U g 与电流调节器的输入端“ 3 ” 端相接,电流调节器的输出端“ 7 ” 端与 MCL3 – 3 的 U ct 端相接,接通控制电路电源﹙红色指示灯亮﹚。
双闭环次同步串级调速系统设计
K e r s:a c d p e e u ain;d u l ls d lo ;e gie rn ei y wo d c s a es ed rg lto o be co e op n n eig d sgn
0 引 言
流双闭环的感应 电机调速控 制系统 , 通过 试验 调试参
风机 、 水泵是我 国国民经 济发展 中重要的用 电设
数, 满足系统 的动 、 静态性能 指标 . 1 串级调 速 基本 原理 三相感应 电机从 定 子传人 转子 的 电磁功率 一部 分用 于拖 动负载为机械功率 ; 另一部分传输 给转 子 电
双 闭环 次 同步 串级 调 速 系统 设 计
李运辉 李 萍 刘 国 忠 , ,
( .西安鑫 隆铁路科技 有限责任公 司, 1 西安 7 0 4 ;. 10 82 北京信息科技大学 , 北京
10 9 )Biblioteka 0 12 誊 萎 誊要 曩 卑级讽逸是电机辕差功率馈迭 键遵曝 式 . 逸 绱 丧 控 可奄祷0 挺蔼 l 哇 n 速的静≮ 周 动态性能 堋扬需求 Ⅱ罐嘲计_案设计双闭环次同 方 i j 甥 目 速系统的控制器参数, 并结合嘲 £ } 器参数 t 匕 该方案可 激 现系统聪l J f 生 I 蕞 ' 畿 球 粥诵 镯侉 融 漪 ’ 砖 辩吕 察 学 行・ I l 毪 jl。 踅鼠 : 关 卑镪 爵遵 虱环 麓 殴诗 罄 誊毫 蠹 臻 薯警 。 | 蘩 Ii 誊 誊 | 嚣 警 毒 薯 袭 摹| | 鼍 啐阻 分獒 号: s * 文 橡标 鹤A l 章编 号 s s 3麓 ; 文 鹄 4 Q 姒 毫 羹 誊 3 奄 薯 |
双闭环三相异步电机串级调速系统毕业设计(可编辑修改word版)

摘要本毕业论文所研究的是双闭环三相异步电动机的串级调速的基本原理与实现方法。
对于绕线式异步电动机来说,由于改变其转子绕组控制变量以实现调速,转子侧的控制变量有电流、电动势、电阻等。
通常转子电流随负载的大小决定,不能任意调节;而转子回路阻抗的调节属于耗能型调速,缺点较多,所以转子侧的控制变量只能是电动势,这也是本文所要研究的重点之一。
利用串级调速系统,就是使绕线式异步电动机实现高性能调速的有效办法。
用转子串反电动势来代替电阻,吸收转差功率;用双闭环控制提高系统的静、动态性能。
把这种用附加电动势的方法将转差功率回收利用的调速称为双闭环串级调速。
这是本文所必须研究的,也是本文的核心所在。
并通过利用MATLAB 软件对双闭环串级调速系统进行仿真,仿真结果表明通过双闭环串级调速系统能及时地对给定速度进行反馈,提高调速的准确性。
关键词:双闭环;串级;调速;MATLAB.AbstractThe graduation thesis studies three-phase asynchronous motor is double loop bunch_rank speed-control of the basic principle and implement method. With wound rotor series, asynchronous motors can adjust speeds through control variables, which include electric current, electromotive force and resistance, etc. on the rotor side. Typically, the rotor current is determined by the load and cannot be adjusted freely. In contrast, adjusting rotor’s return circuit impedance tends to consume more power along with other disadvantages. Therefore, electromotive force should be the only control variable on the rotor side, which is also one of the major points research in this paper.In summary, concatenation control system is one effective means to realize high control ability in series-wound asynchronous motors. Specifically, it is used to replace resistance with rotor’s electromotive force and absorb slip power; and to enhance the static and dynamic capabilities of the system using double closed loop. We refer to this method of utilizing additional electromotive force to recycle slip power as concatenation control with double close loop, which is also the focus of this paper. And through the use of MATLAB software on the double closed loop bunch_rank speed- control system, and simulation draw simulation diagram,the results show that by double closed loop bunch_rank speed-control system can timely given speed feedback, to improve the accuracy of speedKeywords: double-loop;cascade;governor;MATLAB.目录摘要 (I)Abstract (II)1绪论 (1)2串级调速的原理 (3)2.1异步电动机转子附加电动势时的工作情况 (3)2.2串级调速的功率传递关系 (4)2.3串级调速系统及其附加电动势的获得 (5)3双闭环三相异步电机的静态特性和动态特性 (9)3.1三相异步电动机串级调速开环工作机械特性 (9)3.2三相异步电动机单闭环ASR 系统静特性 (11)3.3双闭环调速系统的静态和动态特性 (13)4总体设计方案 (17)4.1双闭环三相异步电机串级调速各个模块的功能 (17)4.2串级调速系统设计 (23)4.3双闭环系统设计 (24)4.4总电路图的设计 (25)5系统仿真 (27)5.1仿真软件的简介 (27)5.2具体的软件仿真设计 (27)5.3系统的仿真、仿真结果的输出及结果分析 (36)总结 (37)参考文献 (38)致谢 (39)1绪论电力传动自动控制系统是把电能转换成机械能的装置。
具有双闭环控制的串级调速系统设计

辽宁工业大学课程设计说明书(论文)辽宁工业大学交流调速课程设计(论文)题目:具有双闭环控制的串级调速系统设计院(系):电气工程学院专业班级:自动化051学号:050302009学生姓名:李丹指导教师:王立红教师职称:教授起止时间:2008.6.-6.辽宁工业大学课程设计(论文)任务书院(系):电气工程学院教研室:自动化说明:此表一式四份,学生、指导教师、教研室、系部各一份。
可加附页。
2008年 6月10日目录第1章方案论证 (4)1.1 概述 (4)1.2 课程设计目的 (4)1.3 课程设计要求 (4)1.4 串级调速原理 (5)第2章具有双闭环控制的串级调速系统设计 (7)2.1 双闭环控制串级调速系统的组成 (7)2.2异步电动机的选择及传递函数的实现 (7)2.3串级调速系统工作时的机械特性 (9)2.4建立串级调速系统的数学模型和动态结构图 (16)第3章参数设计与总结 (17)3.1选择调节器的参数; (17)3.2 设计总结与体会 (19)参考文献 (20)第1章方案论证1.1 概述由于串级调速系统机械特性的静差率较大,所以开环控制系统只能用于对调速精度要求不高的场合。
为了提高静态调速精度,并获得较好的动态特性,须采用闭环控制,和直流调速系统一样,通常采用具有电流反馈和转速反馈的双闭环控制方式。
由于串级条调速系统的转子整流器是不可控的,系统本身不能产生电气制动作用,所谓动态性能的改善只是指启动与加速过程性能的改善,减速过程只能靠负载作用自由降速。
1.2 课程设计目的本课程的课程设计实际是自动化专业学生学习完《交流调速系统控制》课程后,进行的一次全面的综合训练,其目的在于加深对交流调速系统控制理论和基本知识的理解,掌握运用交流调速系统控制方法设计具有双闭环控制的串级调速系统设计,以及系统的调试和运行的基本方法。
1.3课程设计的要求该1900千瓦串级调速系统应用于无缝钢管车间轧制无缝钢管的穿孔轧机拖动电动机中。
双闭环控制串级调速系统
齐齐哈尔大学串级调速系统1主电路方案的确定全面比较单闭环和双闭环调速系统,把握系统要求实现的功能,选择最适合设计要求的虚拟控制电路。
根据系统实际,选择转速,电流双闭环调速系统。
对于交流异步电动机转差功率消耗型调速系统,当转速较低时转差功率消耗较大,从而限制了调速范围。
如果要设法回收转差功率,就需要在异步电动机的转子侧施加控制,此时可以采用绕线转子异步电动机。
常见的绕线转子异步电动机用转子回路串电阻调速,这种调速方法简单、操作方便且价格便宜,但在电阻上将消耗大量的能量,效率低,经济性差,同时由于转子回路附加电阻的容量大,可调的级数有限,不能实现平滑调速。
为了克服上述缺点,必须寻求一种效率较高、性能较好的绕线转子异步电动机转差功率同馈型调速方法,串级调速系统就是一个很好的解决方案。
串级调速是通过绕线式异步电动机的转子回路引入附加电势而产生的。
它属于变转差率来实现串级调速的。
与转子串电阻的方式不同,串级调速可以将异步电动机的功率加以应用(回馈电网或是转化为机械能送回到电动机轴上),因此效率高。
它能实现无级平滑调速,低速时机械特性也比较硬。
特别是晶闸管低同步串级调速系统,技术难度小,性能比较完善,因而获得了广泛的应用。
2系统静态及动态要求若采用转速负反馈和PI调节器的单闭环调速系统虽然可以在保证系统稳定的条件下实现转速无静差,不过当对系统的动态性能要求较高,例如要求快速起制动,突加负载动态速降小等等,单闭环系统难以满足要求,因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩,在单闭环调速系统中,只有电流截止负反馈环节是专门用来控制电流的,但它只是在超过临界电流值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想地控制电流的动态波形,当电流从最大值降低下来以后,电机转矩也随之减少,因而加速过程必然拖长。
若采用双闭环调速系统,则可以近似在电机最大电流(转矩)受限的条件下,充分利用电机的允许过载能力,使电力拖动系统尽可能用最大的加速度起动,到达稳态转速后,又可以让电流迅速降低下来,使转矩马上与负载相平衡,从而转入稳态运行,此时起动电流近似呈方形波,而转速近似是线性增长的,这是在最大电流(转矩)受到限制的条件下调速系统所能得到的最快的起动过程。
晶闸管串级调速双闭环系统设计(DOC)
摘要随着电力电子技术的发展,近代均采用在转子回路内串联晶闸管功率变换器完成回馈任务,这样就构成了由绕线式异步电动机与晶闸管变流器共同组成的晶闸管串级调速系统。
其中低同步的晶闸管串级调速系统,不仅具有良好的调速性能以及能把转差能量回馈电网,而且还结构简单,可靠性高,技术上已经成熟。
性能更优越的超同步晶闸管串级调速也正在发展当中。
晶闸管功率变换装置是交流电动机串级调速系统中的核心部分,它目前存在以下几个问题:装置结构较为复杂,设备初期投资较高,在一定程度上限制了交流调速的推广;存在谐波,对电网造成一定程度的污染;功率因数还不够高,特别是在低转速时功率因数会更低。
尽管如此,今年来串级调速技术在国内外仍然突飞猛进的发展,大量新器件的出现和新技术的发展,使得串级调速性能指标大大提高,有些问题已得到根本的突破。
不久的将来,串级调速装置定会进入生产个领域,发挥巨大的经济效益。
此次设计主要内容是让我们应用已掌握的知识,完成晶闸管串级调速系统的设计、参数定额计算、以及系统的建模与仿真,在此基础上,实现理论与实践的结合。
这次设计,让我更深刻的理解串级调速的原理知识,而且还能锻炼个人动手能力和设计能力,加强本环节知识的掌握,对个人以后更好工作学习打下基础。
预计设计能完成调速系统的设计以及各个环节参数的计算,在此基础上进行建模仿真,得到比较理想的系统工作特性曲线。
目录第1章方案的选择与确定 (3)设计方案的确定与设计思路 (3)第2章串级调速原理与主电路设计 (4)2.1串级调速原理: (4)2.2晶闸管串级调速系统主电路设计 (6)2.3异步电动机串级调速系统的转子整流电路 (7)2.4异步电动机串级调速系统的逆变电路 (8)第3章调速系统主电路的参数计算与器件选择 (10)3.1电动机基本参数和调速要求 (10)3.2逆变变压器的选择 (133)3.3硅整流元件及晶闸管的选择 (13)3.4平波电抗器的选择 (14)3.5主电路保护 (14)3.5.1过电流保护 (14)3.5.2 过电压保护 (155)第4章控制电路设计与系统参数计算 (16)4.1控制电路组成 (16)4.2控制系统的参数计算推导 (17)4.2.1电流环的设计及其参数计算推导 (17)4.2.2速度环的设计及其参数计算推导 (18)4.2.3双闭环系统静态参数计算 (19)4.2.4双闭环系统动态参数计算 (20)第5章串级调速系统的建模 (233)5.1串级调速系统的建模 (23)5.1.1直流电路传递函数 (23)5.1.2电动机的传递函数 (24)5.1.3电流环的设计及其传递函数 (25)5.1.4速度环的设计及其传递函数 (26)5.1.5系统动态结构图 (28)5.2调速系统仿真 (28)设计心得 (30)参考文献 (31)第1章 方案的选择与确定设计方案的确定与设计思路设计电路,根据不同的要求有不同的设计思路,根据我们现有的水平和设计能力,我们选择了比较简单的设计方案:绕线异步电动机在转子回路中串接一个与转子电动势2s E 同频率的附加电动add E 通过改变add E 值大小和相位可实现调速。
双闭环串级调速系统

第 2 部分
双闭环控制的串级调速系统
双闭环控制的串级调速系统
双闭环控制的串级调速系统
启动
调速 (Ud-Ui) Id/Ir
第 3 部分
双闭环控制的串级调速系统动态结构图
双闭环控制的串级调速系统动态结构图
转速调节器是调速系统的主导调节器,它使转速n很快地跟随给定电压 变化,对负载变化起抗扰作用,要保证稳定性和较好的稳态精度。 电流调节器作为内环的调节器,在外环转速的调节过程中,它的作用 是使电流紧紧跟随其给定电压(即外环调节器的输出量)变化。在转速 动态过程中,保证获得电机允许的最大电流,从而加快动态过程。
第 4部分
系统的MATLAB仿真
系统的MATLAB仿真
系统的MATLAB仿真
第 5部分
串级调速系统的启动方式
串级调速系统的启动方式
放映结束
运动控制系统
6.5 双闭环串级调速系统
内容提要
一、传统串级调速系统
二、双闭环控制的串级调速系统
三、双闭环控制的串级调速系统动态结 构图
四、系统的MATLAB仿真
第 1 部分
传统的串级调速系统
传统的串级调速系统
UR为三相整流装置(二极管)将电机转子电动势整流 为直流电压Ud,提供可调的直流电压,作为电机调速 所需的附加直流电动势。 UI为三相可控整流装置,有源逆变,将转差功率变换为 交流功率,回馈电网。
PI控制器控制的双闭环控制串级调速系统..

目录第一章概述 (2)第二章双闭环控制串级调速系统 (3)2.1双闭环控制串级调速系统的组成 (3)2.2异步电动机串级调速时转子整流电路工作状态的选择 (4)2.3串级调速系统的动态数学模型 (6)2.4异步电动机和转子直流回路传递函数计算 (9)2.5调节器参数的设计-电流环和转速环设计 (10)2.5.1 电流环的设计 (10)2.5.2 转速环的设计 (12)第三章 MATLAB仿真 (14)3.1给定阶跃的仿真: (14)3.2抗扰仿真 (14)第四章收获与致谢 (16)参考文献 (16)第一章概述串级调速理论早在20世纪30年代就已提出,到了60-70年代,当可控电力电子器件出现以后,才得到更好的应用。
20世纪60年代以来,由于高压大电流晶闸管的出现,串级调速系统获得了空前的发展。
60年代中期,W.Shepherd和J.Stanw 就提出了一种将绕线转子电动机的转差功率进行整流,然后经过晶闸管逆变器将整流后的转差功率逆变为电网频率的交流功率,并将其反馈到电动机的定子辅助绕组中的晶闸管串级方案,称为“定子反馈”方案,而把通过变压器,逆变变压器,将转差功率反馈到电网,常规的晶闸管串级,称为“电网反馈”方案。
在“定子反馈”方案中,辅助绕组与定子绕组电气上绝缘,通过磁耦合,即电磁感应,将转差功率经过定子绕组反馈到电网,这就是我们所说的“内馈”串调。
20世纪60年代末期,我国的一些单位开始进行晶闸管串级调速的试验,70年代后期,西安整流器厂首先推出了系列产品,以后其他厂家也相继推出。
国内最先是由屈维谦在80年代后期提出内馈串级调速方案的。
90年代中期以后,有一家公司又推出斩波式内馈串调。
随着电力电子技术和控制策略的发展,新的拓扑结构和控制策略被不断提出。
到目前为止全国已有四到五家知名的内馈串级调速装置的生产厂家。
如今节约能源、更加合理地、有效地利用能源是一项艰巨、利国利民造福子孙的长期工作,也是我国的一项基本国策。
PI控制器控制的双闭环控制串级调速系统
目录第一章概述 (2)第二章双闭环控制串级调速系统 (3)2.1双闭环控制串级调速系统的组成 (3)2.2异步电动机串级调速时转子整流电路工作状态的选择 (4)2.3串级调速系统的动态数学模型 (6)2.4异步电动机和转子直流回路传递函数计算 (9)2.5调节器参数的设计-电流环和转速环设计 (10)2.5.1 电流环的设计 (10)2.5.2 转速环的设计 (12)第三章 MATLAB仿真 (14)3.1给定阶跃的仿真: (14)3.2抗扰仿真 (14)第四章收获与致谢 (16)参考文献 (16)第一章概述串级调速理论早在20世纪30年代就已提出,到了60-70年代,当可控电力电子器件出现以后,才得到更好的应用。
20世纪60年代以来,由于高压大电流晶闸管的出现,串级调速系统获得了空前的发展。
60年代中期,W.Shepherd和J.Stanw 就提出了一种将绕线转子电动机的转差功率进行整流,然后经过晶闸管逆变器将整流后的转差功率逆变为电网频率的交流功率,并将其反馈到电动机的定子辅助绕组中的晶闸管串级方案,称为“定子反馈”方案,而把通过变压器,逆变变压器,将转差功率反馈到电网,常规的晶闸管串级,称为“电网反馈”方案。
在“定子反馈”方案中,辅助绕组与定子绕组电气上绝缘,通过磁耦合,即电磁感应,将转差功率经过定子绕组反馈到电网,这就是我们所说的“内馈”串调。
20世纪60年代末期,我国的一些单位开始进行晶闸管串级调速的试验,70年代后期,西安整流器厂首先推出了系列产品,以后其他厂家也相继推出。
国内最先是由屈维谦在80年代后期提出内馈串级调速方案的。
90年代中期以后,有一家公司又推出斩波式内馈串调。
随着电力电子技术和控制策略的发展,新的拓扑结构和控制策略被不断提出。
到目前为止全国已有四到五家知名的内馈串级调速装置的生产厂家。
如今节约能源、更加合理地、有效地利用能源是一项艰巨、利国利民造福子孙的长期工作,也是我国的一项基本国策。
基于matlab的双闭环串级调速的仿真及特性分析
2.1.1 绕线转子异步电动机转子附加电动势的作用 ........................................................... 2 2.1.2 串级调速的各种基本运行状态及功率传递关系 ....................................................... 3 2.2 2.3 串级调速的基本原理 ...................................................................................................... 4 绕线异步电机调速系统的分类 ....................................................................................... 6
Abstract ....................................................................................................................................II 第一章
1.1 1.2
3.1.1 主电路的设计思路 ..................................................................................................12 3.1.2 主电路的设计依据 ..................................................................................................12 3.1.3 主电路参数的设计 ..................................................................................................12 3.2 控制电路的设计 ............................................................................................................17
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双闭环控制的串级调速系统
由于串级调速系统机械特性的
静差率较大,所以开环控制系统只能
用于对调速精度要求不高的场合。
为
了提高静态调速精度,并获得较好的
动态特性,须采用闭环控制,通常采
用具有电流反馈与转速反馈的双闭
环控制方式。
由于串级调速系统的转
子整流器是不可控的,系统本身不能
产生电气制动作用,所谓动态性能的
改善只是指起动与加速过程性能的
改善,减速过程只能靠负载作用自由降速。
1. 双闭环控制串级调速系统的组成
图1 所示为双闭环控制的串级调速系统原理图。
图中,转速反馈信号取自异步电动机轴上连接的测速发电机,电流反馈信号取自逆变器交流侧的电流互感器,也可通过霍尔变换器或直流互感器取自转子直流回路。
为了防止逆变器逆变
颠覆,在电流调节器
ACR输出电压为零
时,应整定触发脉冲
输出相位角
为。
图1 所
示的系统与直流不可
逆双闭环调速系统一
样,具有静态稳速与
动态恒流的作用。
所
不同的是它的控制作
用都是通过异步电动
机转子回路实现的。
2. 串级调速系统的
动态数学模型
在图1 所示的系
统中,可控整流装置、调节器以及反馈环节的动态结构框图均与直流调速系统中相同。
在异步电动机转子直流回路中,不少物理量都与转差率有关,所以要单独处理。
(1) 转子直流回路的传递函数
根据图2 的等效
电路图可以列出串级
调速系统转子直流回
路的动态电压平衡方
程式
式中U d0 ——
当 s=1 时转子整流
器输出的空载电压,
U i0——逆变器直流侧的空载电压,;
L——转子直流回路总电感,L = 2L D + 2L T + L L
L D——折算到转子侧的异步电动机每相漏感,
;
L T——折算到二次侧的逆变变
压器每相漏感,;
LL ——平波电抗器电感;
R ——转差率为 s 时转子直
流回路等效电阻,。
于是,式(1)可改写成
将式(2)两边取拉氏变换,可求得转子直流回路的传递函数
式中T Lr ——转子直流回路的时间
常数,;
K i ——转子直流回路的放大系数,。
转子直流回路的动态结构框图如图3所示。
需要指出,串级调速系统转子直流回路传递函数中的时间常数 T Lr 和放大系数 K Lr都是转速 n 的函数,它们是非定常的。
(2) 异步电动机的传递函数
异步电动机的电磁转矩为
电力拖动系统的运动方程式为
或写成
式中I L——负载转矩TL所对应的等效直流电流。
由此可得异步电动机在串级调速时的传递函数为
其中,为机电时间常数,T M与 R、C E、C M都有关系,所以也不是常数,而是I d和 n 的函数。
(3) 串级调速系统的动态结构框图
把图1 中的异步电动机和转子直流回路都画成传递函数框图,再考虑给定滤波环节和反馈滤波环节就可直接画出双闭环控制串级调速系统的动态结构框图,如图4所示。
双闭环控制的串级调速系统
3. 调节器参数的设计
双闭环控制串级调速系统的动态校正一般主要按抗扰性能考
虑,即应使系统在负载扰动时有良好的动态响应。
在采用工程设
计方法进行动态设计时,可以像直流调速系统那样,电流环按典
型I型系统设计,转速环按典型Ⅱ型系统设计。
但是串级调速系
统中转子直流回路的时间常数 T Lr及放大系数 K Lr 都是转速的
函数,而异步电动机的机电时间常数 T M又是转速和电流的函
数,这就给调节器的设计带来一定的困难。
具体设计时,可以先
在确定的转速 n 和负载电流 I d的前提下,求出各传递函数中
的参数。
例如,按照要求的最大转差率S m ax或平均转差率
1/2S m ax来确定转速,按额定负载或常用的实际负载来选定电
流,然后按定常系统进行设计。
如果用模拟控制系统实现,则当
实际转速或电流改变时,系统的动态性能就要变坏。
如果采用微
机数字控制,可以按照不同的转速和电流事先计算好参数的变
化,用表格的方式存入微机,实时控制时可根据检测得到的转速
和电流查表调用,就可以得到满意的动态特性。
4. 串级调速系统的起动方式
串级调速系统是依靠逆变器提供附加电动势而工作的,为了使系统工作正常,对系统的起动与停车控制必须有合理的措施予以保证。
总的原则是在起动时必须使逆变器先于电机接上电网,停车时则比电机后脱离电网,以防止逆变器交流侧断电,而使晶闸管无法关断,造成逆变器的短路事故。
串级调速系统的起动方式通常有间接起动和直接起动两种。
(1) 间接起动
大部分采用串级调速的
设备是不需要从零速到额定
转速作全范围调速的,特别
对于风机、泵、压缩机等机
械,其调速范围本来就不大,
串级调速装置的容量可以选
择比电动机小得多。
为了使
串级调速装置不受过电压损
坏,须采用间接起动方式,
即将电动机转子先接入电阻
或频敏变阻器起动,待转速
升高到串级调速系统的设计
最低转速时,才把串级调速
装置投人运行。
由于这类机械不经常起动,所用的起动电阻等都可按短时工作制选用,容量与体积都较小。
从串电阻起动换接到串级调速可以利用对电动机转速的检测或利用时间原则自动控制。
图5所示是间接起动控制原理图。
起动操作顺序如下:先合上装置电源总开关S,使逆变器在
min下等待工作。
然后依次接通接触器 K1,接人起动电阻 R,再接通K0,把电机定子回路与电网接通,电动机便以转子串电阻的方式起动。
待起动到所设计的n m in(s max)时接通 K2,使电动机转子接到串级调速装置,同时断开 K1,切断起动电阻,此后电动机就可以串级调速的方式继续加速到所需的转速运行。
不允许在未达到设计最低转速以前就把电动机转子回路与串级调速装置联通,否则转子电压会超过整流器件的电压定额而损坏器件,所以转速检测或起动时间计算必须准确。
停车时,由于没有制动作用,应先断开 K2,使电动机转子回路与串级调速装置脱离,再断开 K0,以防止
当 K0 断开时在转子侧感生断闸高电压而损坏整流器与逆变器。
如果生产机械许可,也可以不用检测最低转速自动控制,而让
电动机在串电阻方式下起动到最高速,切换到串级调速后,再按工艺要求调节到所需要的转速运行。
这种起动方式可以保证整流器与逆变器不致受到超过定额的电压,工作安全。
但电动机要先升到最高转速,再通过减速达到工作转速,对于有些生产机械是不允许的。
(2) 直接起动
直接起动又称串级调速方式起动,用于可在全范围调速的串级调速系统。
在起动控制时让逆变器先于电动机接通交流电网,然后使电动机的定子与交流电网接通,此时转子呈开路状态,可防止因电动机起动时的合闸过电压通过转子回路损坏整流装置,最后再使转子回路与整流器接通。
在图5中,接触器的工作顺序为 S—K0—K2,此时不需要起动电阻。
当转子回路接通时,由于转子整流电压小于逆变电压,直流回路无电流,电动机尚不能起动。
待发出给定信号后,随着夕的增大,逆变电压降低?产生直流电流,电动机才逐渐加速,直至达到给定转速。