哈尔滨工业大学结构力学15-
哈工大结构力学题库一章

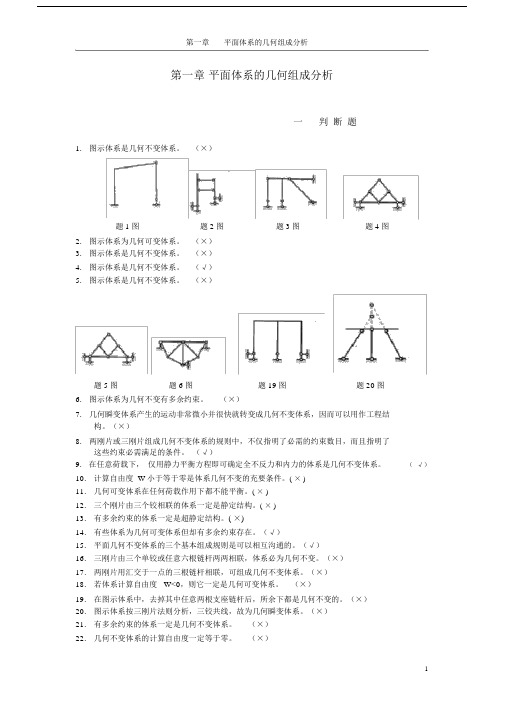
第一章平面体系的几何组成分析一判断题1. 图示体系是几何不变体系。
()题1图题2图题3图题4图2. 图示体系为几何可变体系。
()3. 图示体系是几何不变体系。
()4. 图示体系是几何不变体系。
()5. 图示体系是几何不变体系。
()题5图题6图题19图题20图6. 图示体系为几何不变有多余约束。
()7. 几何瞬变体系产生的运动非常微小并很快就转变成几何不变体系,因而可以用作工程结构。
()8. 两刚片或三刚片组成几何不变体系的规则中,不仅指明了必需的约束数目,而且指明了这些约束必需满足的条件。
()9. 在任意荷载下,仅用静力平衡方程即可确定全不反力和内力的体系是几何不变体系。
()10. 计算自由度W小于等于零是体系几何不变的充要条件。
( )11. 几何可变体系在任何荷载作用下都不能平衡。
( )12. 三个刚片由三个铰相联的体系一定是静定结构。
( )13. 有多余约束的体系一定是超静定结构。
( )14. 有些体系为几何可变体系但却有多余约束存在。
()15. 平面几何不变体系的三个基本组成规则是可以相互沟通的。
()16. 三刚片由三个单铰或任意六根链杆两两相联,体系必为几何不变。
()17. 两刚片用汇交于一点的三根链杆相联,可组成几何不变体系。
()18. 若体系计算自由度W<0,则它一定是几何可变体系。
()19. 在图示体系中,去掉其中任意两根支座链杆后,所余下都是几何不变的。
()20. 图示体系按三刚片法则分析,三铰共线,故为几何瞬变体系。
()21. 有多余约束的体系一定是几何不变体系。
()22. 几何不变体系的计算自由度一定等于零。
()23. 几何瞬变体系的计算自由度一定等于零。
()24. 图中链杆1和2的交点O可视为虚铰。
()题24图二选择题1. 图示体系为:()A.几何不变无多余约束 B.几何不变有多余约束 C.几何常变 D.几何瞬变题1图题2图题3图2. 图示体系为:()A.几何不变无多余约束 B.几何不变有多余约束 C.几何常变 D.几何瞬变3. 图示体系虽有三个多余约束,但为保证其几何不变,哪两根链杆是不能同时去掉的。
哈工大结构力学题库七章

第七章影响线一判断题1. 图示梁AB与A0B0,其截面C与C0弯矩影响线与剪力影响线完全相同。
(X)题1图题2图2. 图示结构QE影响线得AC段纵标不为零。
(X)3. 图示梁K截面得MK影响线、QK影响线形状如图a、b所示。
4. 图示梁得MC影响线、QC影响线形状如图a、b所示。
5. 图示梁得MC影响线、MB影响线形状如图a、b所示。
6. 图示结构MB影响线得AB段纵标为零。
7、图示梁跨中C截面弯矩影响线得物理意义就是荷载P=1作用在截面C得弯矩图形。
(X)8、用静力法作静定结构某量值得影响线与用机动法作该结构同一量值得影响线就是不等价得。
(X)9、求某量值影响线方程得方法,与恒载作用下计算该量值得方法在原理上就是相同得。
(√)10、影响线就是用于解决活载作用下结构得计算问题,它不能用于恒载作用下得计算。
(X)11. 移动荷载就是指大小,指向不变,作用位置不断变化得荷载,所以不就是静力荷载。
(X)12. 用静力法作影响线,影响线方程中得变量x代表截面位置得横坐标。
(X)13. 表示单位移动荷载作用下某指定截面得内力变化规律得图形称为内力影响线。
(√)14. 简支梁跨中截面弯矩得影响线与跨中有集中力P时得M图相同。
(X)15. 简支梁跨中C截面剪力影响线在C截面处有突变。
(√)16. 绝对最大弯矩就是移动荷载下梁得各截面上最大得弯矩。
(√)17、静定结构及超静定结构得内力影响线都就是由直线组成。
(X)18、图示结构Q C影响线得CD段为斜直线。
19、图示结构K断面得剪力影响线如图b所示。
(√)题19图20、用机动法作得图a所示Q B左结构影响线如图b。
题20图题21图21. 图示结构a杆得内力影响线如图b所示22. 荷载处于某一最不利位置时,按梁内各截面得弯矩值竖标画出得图形,称为简支梁得弯矩包络图。
(X)23. 单位力P=1沿图a所示桁架上移动,杆K内力影响线如图b、24. 图为图所示结构QC右得影响线。
哈工大结构力学精品课件
结构力学张金生绪论§1 . 结构力学的内容和任务一.对象结构分为:杆系结构,板壳结构,实体结构三.内容 结构组成;内力,位移,临界力计算.二.任务 研究结构的刚度,强度,稳定性的 计算原理和计算方法结构:承受并传递荷载的骨架部分确定计算简图的原则: 1.能反映实际结构的主要力学特性;2.分析计算尽可能简便§2 . 杆件结构的计算简图计算简图:在结构分析当中用来代替实际结构的计算模型(图形)简化内容:1.杆件的简化: 杆件 杆件的轴线2.结点的简化: 刚结点 铰结点 半铰结点(组合结点)半铰结点铰结点刚结点确定计算简图的原则:1.能反映实际结构的主要力学特性;2.分析计算尽可能简便§2 . 杆件结构的计算简图计算简图:在结构分析当中用来代替实际结构的计算模型(图形)简化内容: 1.杆件的简化: 杆件 杆件的轴线2.结点的简化: 刚结点 铰结点 半铰结点(组合结点)3.支座的简化: 固定铰支座 可动较支座 固定端支座 滑动支座(定向支座)确定计算简图的原则:1.能反映实际结构的主要力学特性;2.分析计算尽可能简便§2 . 杆件结构的计算简图计算简图:在结构分析当中用来代替实际结构的计算模型(图形)简化内容: 1.杆件的简化: 杆件 杆件的轴线2.结点的简化: 刚结点 铰结点 半铰结点(组合结点)3.支座的简化: 固定铰支座 可动较支座 固定端支座 滑动支座(定向支座)4.体系的简化: 空间结构 平面结构确定计算简图的原则:1.能反映实际结构的主要力学特性;2.分析计算尽可能简便§2 . 杆件结构的计算简图计算简图:在结构分析当中用来代替实际结构的计算模型(图形)简化内容: 1.杆件的简化: 杆件 杆件的轴线2.结点的简化: 刚结点 铰结点 半铰结点(组合结点)3.支座的简化: 固定铰支座 可动较支座 固定端支座 滑动支座(定向支座)4.体系的简化: 空间结构 平面结构5.荷载的简化: 集中力、集中力偶、分布荷载§3 . 杆件结构的类型1.梁2.拱3.桁架4.刚架5.组合结构第一章杆件体系的几何组成分析(Geometric construction analysis)§1. 几何组成分析本章假定:所有杆件均为刚体§1-1 基本概念一. 几何不变体系几何可变体系几何可变体系不能作为建筑结构结构必须是几何不变体系本章目的:判定一个体系是否能作为结构结构是如何构造的几何形状不能变化的平面物体几何不变体系的自由度一定等于零几何可变体系的自由度一定大于零§1. 几何组成分析§1-1 基本概念一. 几何不变体系几何可变体系二. 刚片几何形状不能变化的平面物体三. 自由度确定体系位置所需的独立坐标数四. 约束(联系) 能减少自由度的装置1. 链杆2. 单铰§1. 几何组成分析§1-1 基本概念一. 几何不变体系 几何可变体系二. 刚片 几何形状不能变化的平面物体 三. 自由度 确定体系位置所需的独立坐标数四. 约束(联系) 能减少自由度的装置1. 链杆 2. 单铰 3. 链杆与单铰的关系4. 虚铰3. 链杆与单铰的关系4. 虚铰§1. 几何组成分析2. 单铰 5. 复铰1. 链杆连接N 个刚片的复铰相当于N-1个单铰§1. 几何组成分析§1-1 基本概念一. 几何不变体系 几何可变体系二. 刚片 几何形状不能变化的平面物体 三. 自由度 确定体系位置所需的独立坐标数四. 约束(联系) 能减少自由度的装置五. 计算自由度0632=−×=W 02936=×−×=W 032333=−×−×=W§1. 几何组成分析五. 计算自由度0632=−×=W 08936=×−×=W 032333=−×−×=W 链杆数单铰数刚片数链杆数结点数−×−×=−×=232W W 计算自由度大于零一定可变;若等于零则一定不变吗§1. 几何组成分析五. 计算自由度链杆数单铰数刚片数链杆数结点数−×−×=−×=232W W 计算自由度大于零一定可变;若等于零则一定不变吗六. 多余约束 必要约束计算自由度小于零一定不变吗计算自由度小于零一定有多余约束§1. 几何组成分析§1-1 基本概念一. 几何不变体系几何可变体系二. 刚片三. 自由度四. 约束(联系) 链杆单铰复铰虚铰实铰五. 计算自由度六. 多余约束必要约束P N=构成无多余约束的几何不变体系构成无多余约束的几何不变体系.§1. 几何组成分析§1-2 无多余约束的几何不变体系的组成规则一. 三刚片规则二元体:在一个体系上用两个不共线的链杆连接一个新结点的装置.二. 两刚片规则在一个体系上加减二元体不影响原体系的机动性质.三. 二元体规则§1. 几何组成分析§1-1 基本概念§1-2 无多余约束的几何不变体系的组成规则§1-3 几何组成分析举例例1: 对图示体系作几何组成分析解: 三刚片三铰相连,三铰不共线,所以该体系为无多余约束的几何不变体系.§1. 几何组成分析§1-3 几何组成分析举例例2: 对图示体系作几何组成分析解:该体系为无多余约束的几何不变体系.方法1: 若基础与其它部分三杆相连,去掉基础只分析其它部分例3: 对图示体系作几何组成分析解: 该体系为无多余约束的几何不变体系.方法2: 利用规则将小刚片变成大刚片.例4: 对图示体系作几何组成分析解: 该体系为瞬变体系.方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.例5:对图示体系作几何组成分析解: 该体系为常变体系.方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法4: 去掉二元体.例6:对图示体系作几何组成分析解: 该体系为无多余约束几何不变体系.方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.例7: 对图示体系作几何组成分析方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.解: 该体系为有一个多余约束几何不变体系.练习: 对图示体系作几何组成分析方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.练习: 对图示体系作几何组成分析方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.方法1: 若基础与其它部分三杆相连,去掉基础只分析其它部分练习: 对图示体系作几何组成分析方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.几何组成思考题§几何组成分析的假定和目的是什麽?§何谓自由度?系统自由度与几何可变性有何联系?§不变体系有多余联系时,使其变成无多余联系几何不变体系是否唯一?§瞬变体系有何特点?可变体系时如何区分瞬变还是常变?§瞬铰和实际铰有何异同?§无多余联系几何不变体系组成规则各有什麽限制条件?不满足条件时可变性如何?§按组成规则建立结构有哪些组装格式?组装格式和受力分析有无联系?§如何确定计算自由度?§对体系进行组成分析的步骤如何?几何组成作业题§1-1 b c§1-2 a d g h i j k l §交作业时间:本周 5§1. 几何组成分析作业:1-1 (1-1 (b)b)试计算图示体系的计算自由度 解:由结果不能判定其是否能作为结构1321138−=−×−×=W 110222531−=−×−×+×=W 或:§1. 几何组成分析作业:1-1 (c)试计算图示体系的计算自由度解:由结果可判定其不能作为结构131216=−×=W 13240328=−×−×=W 或:§1. 几何组成分析作业:1-2 (a)试分析图示体系的几何组成从上到下依次去掉二元体或从基础开始依次加二元体.几何不变无多余约束§1. 几何组成分析作业:1-2 (d)试分析图示体系的几何组成依次去掉二元体.几何常变体系§1. 几何组成分析作业:1-2 (f)试分析图示体系的几何组成有一个多余约束的几何不变体系§1. 几何组成分析作业:1-2 (h)( i)试分析图示体系的几何组成瞬变体系几何不变无多余约束作业:试分析图示体系的几何组成有一个无穷远铰:四杆不平行不变平行且各自等长常变平行不等长瞬变§1. 几何组成分析作业:1-2 (j)试分析图示体系的几何组成瞬变体系§1. 几何组成分析L)试分析图示体系的几何组成1-2 (L)作业:1-2 (几何不变无多余约束§1. 几何组成分析例:试分析图示体系的几何组成瞬变体系§1. 几何组成分析练习:试分析图示体系的几何组成几何不变无多余约束一个单刚结点相当于三个约束.单刚结点与其它约束的关系:复刚结点:刚片复刚结点相当于练习:试分析图示体系的几何组成无多余约束几何不变体系有两个多余约束的几何不变体系练习:试分析图示体系的几何组成无多余约束几何不变体系无多余约束的几何不变体系。
(完整版)哈工大结构力学题库一章.docx
第一章平面体系的几何组成分析一判断题1.图示体系是几何不变体系。
(×)题1图题2图题3图题4图2.图示体系为几何可变体系。
(×)3.图示体系是几何不变体系。
(×)4.图示体系是几何不变体系。
(√)5.图示体系是几何不变体系。
(×)题5图题6图题19图题20图6.图示体系为几何不变有多余约束。
(×)7.几何瞬变体系产生的运动非常微小并很快就转变成几何不变体系,因而可以用作工程结构。
(×)8.两刚片或三刚片组成几何不变体系的规则中,不仅指明了必需的约束数目,而且指明了这些约束必需满足的条件。
(√)9.在任意荷载下,仅用静力平衡方程即可确定全不反力和内力的体系是几何不变体系。
(√)10.计算自由度 W小于等于零是体系几何不变的充要条件。
( × )11.几何可变体系在任何荷载作用下都不能平衡。
( × )12.三个刚片由三个铰相联的体系一定是静定结构。
( × )13.有多余约束的体系一定是超静定结构。
( ×)14.有些体系为几何可变体系但却有多余约束存在。
(√)15.平面几何不变体系的三个基本组成规则是可以相互沟通的。
(√)16.三刚片由三个单铰或任意六根链杆两两相联,体系必为几何不变。
(×)17.两刚片用汇交于一点的三根链杆相联,可组成几何不变体系。
(×)18.若体系计算自由度 W<0,则它一定是几何可变体系。
(×)19.在图示体系中,去掉其中任意两根支座链杆后,所余下都是几何不变的。
(×)20.图示体系按三刚片法则分析,三铰共线,故为几何瞬变体系。
(×)21.有多余约束的体系一定是几何不变体系。
(×)22.几何不变体系的计算自由度一定等于零。
(×)23.几何瞬变体系的计算自由度一定等于零。
(×)24.图中链杆 1 和 2 的交点 O可视为虚铰。
研究生入学考试辅导丛书----结构力学第三版习题
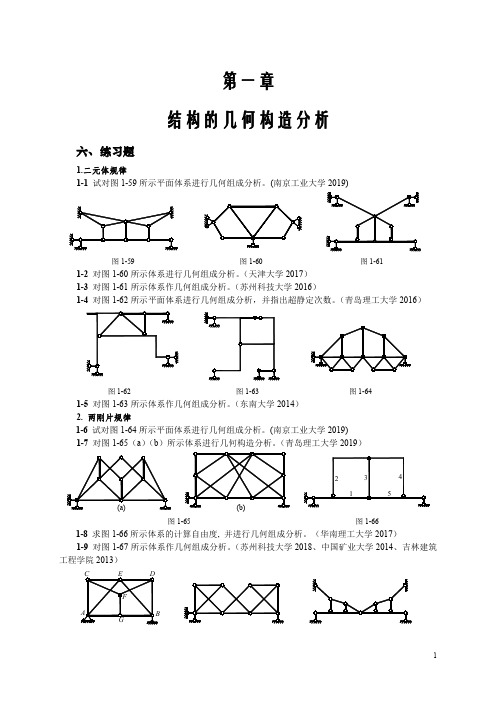
第一章结构的几何构造分析六、练习题1.二元体规律1-1试对图1-59所示平面体系进行几何组成分析。
(南京工业大学2019)(b)a)(c)图1-59图1-60图1-611-2对图1-60所示体系进行几何组成分析。
(天津大学2017)1-3对图1-61所示体系作几何组成分析。
(苏州科技大学2016)1-4对图1-62所示平面体系进行几何组成分析,并指出超静定次数。
(青岛理工大学2016)图1-62图1-63图1-641-5对图1-63所示体系作几何组成分析。
(东南大学2014)2.两刚片规律1-6试对图1-64所示平面体系进行几何组成分析。
(南京工业大学2019)1-7对图1-65(a )(b )所示体系进行几何构造分析。
(青岛理工大学2019)图1-65图1-661-8求图1-66所示体系的计算自由度,并进行几何组成分析。
(华南理工大学2017)1-9对图1-67所示体系作几何组成分析。
(苏州科技大学2018、中国矿业大学2014、吉林建筑工程学院2013)图1-67图1-68图1-69 1-10图1-68所示体系的机动分析结论是。
(重庆交通大学2015)3.三刚片规律3.1三个铰都对应于有限点1-11对图1-69所示平面体系进行几何组成分析。
(南京工业大学2019)1-12对图1-70所示体系进行几何组成分析(各点均为铰结点)。
(长沙理工大学2017)图1-70图1-71 1-13图1-71所示体系的计算自由度W=,有个多余约束,为体系。
(哈尔滨工业大学2017)1-14试对图1-72所示平面体系进行几何组成分析。
(哈尔滨工业大学2015)图1-72图1-73图1-74 1-15计算图1-73所示杆件体系的计算自由度,并判断体系符合哪种几何组成规律?(北京工业大学2014)3.2一个无穷远瞬铰1-16对图1-74所示体系进行几何构成分析。
(西安交通大学2015)1-17图1-75所示为()。
(山东科技大学2018)A.无多余约束的几何不变体系;B.有多余约束的几何不变体系;C.瞬变体系;D.常变体系。
哈工大结构力学题库六章 2

第六章力矩分配法一判断题1. 传递系数C与杆件刚度和远端的支承情况有关.( √)2.力矩分配中的传递系数等于传递弯矩与分配弯矩之比,它与外因无关.( √)3.力矩分配法所得结果是否正确,仅需校核交于各结点的杆端弯矩是否平衡.(×)4.力矩分配法经一个循环计算后,分配过程中的不平衡力矩(约束力矩)是传递弯矩的代数和.( √)5.用力矩分配法计算结构时,汇交与每一结点各杆端力矩分配系数总和为1,则表明力矩分配系数的计算绝对无错误.( ×)6.在力矩分配法中,分配与同一结点的杆端弯矩之和与结点不平衡力矩大小相等,方向相同.( ×)7.力矩分配法是以位移法为基础的渐进法,这种计算方法不但可以获得近似解,也可获得精确解.( √)8.在任何情况下,力矩分配法的计算结构都是近似的.( ×)9.力矩分配系数是杆件两端弯矩的比值.( ×)10.图示刚架用力矩分配法,求得杆端弯矩M CB=-16/2ql( ×)题10图题11图题12图11.图示连续梁,用力矩分配法求得杆端弯矩M BC=—M/2.( ×)12.图示刚架可利用力矩分配法求解.( √)13.力矩分配法就是按分配系数分配结点不平衡力矩到各杆端的一种方法.(×)14.在力矩分配法中,同一刚性结点处各杆端的力矩分配系数之和等于1.( √)15.转动刚度(杆端劲度)S只与杆件线刚度和其远端的支承情况有关.( √)16.单结点结构的力矩分配法计算结果是精确的.( √)17.力矩分配法仅适用于解无线位移结构.( √)18.用力矩分配法计算图示结构时,杆端AC的分配系数29/18=ACμ.(√)148149题18图 题19图 题21图19. 图示杆AB 与CD 的EI,l 相等,但A 端的劲度系数(转动刚度)S AB 大于C 端的劲度系数(转动刚度) S CD .( √ ) 20. 力矩分配法计算荷载作用问题时,结点最初的不平衡力矩(约束力矩)仅是交于结点各杆端固端弯矩的代数和.( × )21. 若使图示刚架结点A 处三杆具有相同的力矩分配系数,应使三杆A 端的劲度系数(转动刚度)之比为:1:1:1.( √ ) 22. 有结点线位移的结构,一律不能用力矩分配法进行内力分析.( × ) 23. 计算有侧移刚架时,在一定条件下也可采用力矩分配法.( √ ) 24. 有结点线位移的结构,一律不能用力矩分配法进行内力分析.( × )二 选 择 题1. 图示结构汇交于A 的各杆件抗弯劲度系数之和为∑A S ,则AB 杆A 端的分配系数为: ( B ) A.∑=SAAB ABi /4μB. ∑=S AAB ABi /3μ C. ∑=SAAB ABi /2μD.∑=SAAB ABi /μ题1图 题2图 2. 图示结构EI=常数,用力矩分配法计算时,分配系数μ4A 为:( D )A. 4/11B. 1/2C. 1/3D. 4/91503. 在图示连续梁中,对结点B 进行力矩分配的物理意义表示( D )A. 同时放松结点B 和结点CB. 同时固定结点B 和结点CC. 固定结点B,放松结点CD. 固定结点C,放松结点B题3图 题4图4. 图示等截面杆件,B 端为定向支座,A 端发生单位角位移,其传递系数为( C )A. C AB =1B. C AB =1/2C. C AB =-1D. C AB =05. 等直杆件AB 的转动刚度(劲度系数)S AB :(A )A 与B 端支承条件及杆件刚度有关B 只与B 端的支承条件有关C 与A 、B 两端的支承条件有关D 只与A 端支承条件有关6. 等直杆件AB 的弯矩传递系数C AB :(B )A 与B 端支承条件及杆件刚度有关 B 只与B 端的支承条件有关C 与A 、B 两端的支承条件有关D 只与A 端支承条件有关7. 当杆件刚度(劲度)系数S AB =3i 时,杆的B 端为:(C )A 自由端B 固定端C 铰支承D 定向支承8. 力矩分配法计算得出的结果(D )A 一定是近似解B 不是精确解C 是精确解D 可能为近似解,也可能是精确解。
哈工大结构力学PPT课件(2024版)
2021
9
七、图示桁架C杆的内力是 F
c
a
F
a
a
a aa
2021
10
八、图示结构A端的弯矩(以下边受拉为正) MAC为:
A: -Fl B: Fl C: -2Fl D: 2Fl
F
Fl
Fl
A
C
l
l
2021
(D)
11
九、图示结构中,N F E _ 4F_ , N F D _ 0_ .
A B
F CE
习题讨论
2021
1
一、对图示体系进行几何组成分析。 几无 何多 不余 变约 体束 系的
2021
2
几 何 可 变 体 系
2021
3
二、图示结构跨中截面的弯矩 (下侧受拉为正)是:
A: ql2 8cos, B: ql2 8cos
C: ql2 8cos2 , D: ql2 8cos2
q
B
A
C
l/2
m
m
(A)
(B)
2021(C)
(D)6
五、图示结构AB杆A端的剪力FQAB为 -M/a
。
F/2 F
F/2 A
a/4
a/4
a/4 M
a/4 B
a
2021
7
六、改正图示结构的M图。
m/2
m/4
m
m/2 2a
a
a
2021
8
Fa
F
0.5 Pa
1.5 Fa
1.5 FPa
1.5a
2.5a
1.5a
2F
1a 1a
4F
10.5F
2F b a
哈工大王焕定版结构力学参考答案

王焕定版结构力学第6章习题答案6-1 试确定图示结构位移法的基本未知量。
解(a) n=2(b) n=1(c) n=2 (e) n=5(f) n=2(d) n=36-2 试用位移法作图示刚架的M基本结构解 1111P 0k F Δ+=111P 1245kN m k i F ==−, 1154kN m iΔ=⋅11P M M M =Δ+习题5-2图90M P 图(kNm)1M 图M 图(kNm)6-3试用位移法作图示刚架的M图。
习题5-3图1M图及系数k11、k21的求解i3i/l2M图及系数k12、k22的求解M P 图及自由项F 1P 、F 2P 的求解解111221P 1112222P 111221222221P 2P 231239752124813197254F F k k F k k F i i k i k k k l lql ql ql ql i iΔΔΔΔ===−===Δ=−Δ=−1++=0++=0,,,, 图(ql ×E 25113928ql6-4试用位移法作图示刚架的M 图。
解1111P 111P P P101010k F k i F F lF l iΔ+===Δ=−,习题5-4图基本结构1M 图M p 图ECB0.3图(F6-5 作图示刚架的M 图。
基本结构习题5-5图DA30 9012i /l 2 6i /l6i /l 6i /l6-6习题5-6图 基本结构1M 图及系数k 11、k 21的求解 4i 2i k 12、k 22的求解2i 4i M P 图(kNm)及自由项F 1P 、F 2P 的求解 60535530 712570575F N6-7 试用位移法计算图示结构,并作内力图。
基本体系习题5-7图1M 图及系数k 11、k 21的求解k 11k 212M 图及系数k 12、k 22的求解k 22M P 图(kNm)及自由项F 1P 、F 2P 的求解F 2PM 图(kNm)解111221P 1212222P 1112212221P 2P 2123361m 1m 120kNm 20kN20kNm 40kNm 3k k F k k F ii k i k k k F F iiΔΔΔΔ===−===Δ=−Δ=−1++=0++=0,,, N 图(kN)F Q 206-8基本体系习题5-8图2M 图及系数k 12、k 22的求解3i解111221P 1212222P 111221221P 2P 1252250275505151k k F k k F k i k k i k iF F i i11ΔΔΔΔ======Δ=−Δ=1++=0++=0,,,,6-12 设支座 B 下沉0.5cm B Δ=,5310kN m EI 2=×⋅。
(完整版)哈工大结构力学题库一章

第一章平面体系的几何组成分析一判断题1. 图示体系是几何不变体系。
(×)题1图题2图题3图题4图2. 图示体系为几何可变体系。
(×)3. 图示体系是几何不变体系。
(×)4. 图示体系是几何不变体系。
(√)5. 图示体系是几何不变体系。
(×)题5图题6图题19图题20图6. 图示体系为几何不变有多余约束。
(×)7. 几何瞬变体系产生的运动非常微小并很快就转变成几何不变体系,因而可以用作工程结构。
(×)8. 两刚片或三刚片组成几何不变体系的规则中,不仅指明了必需的约束数目,而且指明了这些约束必需满足的条件。
(√)9. 在任意荷载下,仅用静力平衡方程即可确定全不反力和内力的体系是几何不变体系。
(√)10. 计算自由度W小于等于零是体系几何不变的充要条件。
(×)11. 几何可变体系在任何荷载作用下都不能平衡。
(×)12. 三个刚片由三个铰相联的体系一定是静定结构。
(×)13. 有多余约束的体系一定是超静定结构。
(×)14. 有些体系为几何可变体系但却有多余约束存在。
(√)15. 平面几何不变体系的三个基本组成规则是可以相互沟通的。
(√)16. 三刚片由三个单铰或任意六根链杆两两相联,体系必为几何不变。
(×)17. 两刚片用汇交于一点的三根链杆相联,可组成几何不变体系。
(×)18. 若体系计算自由度W<0,则它一定是几何可变体系。
(×)19. 在图示体系中,去掉其中任意两根支座链杆后,所余下都是几何不变的。
(×)20. 图示体系按三刚片法则分析,三铰共线,故为几何瞬变体系。
(×)21. 有多余约束的体系一定是几何不变体系。
(×)22. 几何不变体系的计算自由度一定等于零。
(×)23. 几何瞬变体系的计算自由度一定等于零。
(×)24. 图中链杆1和2的交点O可视为虚铰。
哈工大结构力学课件.pdf

第三章静定结构的位移计算Displacement of Statically Determinate Structures1. 弹性杆件的变形与变形能计算2. 变形体虚功原理3. 单位荷载法4. 图乘法5. 其他外因引起的位移计算6. 互等定理7. 结论与讨论1 结构位移计算概述一、结构的位移 (Displacement of Structures)x Δy ΔA A ′βF P 线位移,角位移,相对线位移、角位移等统称广义位移线位移角位移DC ΔΔ+相对线位移CD D ΔC ΔαF P γ相对角位移γα +制造误差 δ 等铁路工程技术规范规定: 二、 计算位移的目的引起结构位移的原因(1) 刚度要求如:荷载、温度改变 ΔT 、支座移动 Δc 、在工程上,吊车梁允许的挠度< 1/600 跨度;桥梁在竖向活载下,钢板桥梁和钢桁梁最大挠度 < 1/700 和1/900跨度高层建筑的最大位移< 1/1000 高度。
最大层间位移< 1/800 层高。
(3)理想联结 (Ideal Constraint)。
三、 本章位移计算的假定(2) 超静定、动力和稳定计算(3)施工要求叠加原理适用(principle of superposition)(1) 线弹性 (Linear Elastic),(2) 小变形 (Small Deformation),返首2 变形体虚功原理 (Principle of Virtual Work)一、功(Work)、实功(Real Work)和虚功(Virtual Work)两种状态力状态位移状态F P F P /2F P /2(虚)力状态(虚力状态)(虚位移状态)无关(虚)位移状态q注意:(1)属同一体系;(2)均为可能状态。
即位移应满足变形协调条件;力状态应满足平衡条件。
(3)位移状态与力状态完全无关;一些基本概念:实功:广义力在自身所产生的位移上所作的功功:力×力方向位移之总和广义力:功的表达式中,与广义位移对应的项功:广义力×广义位移之总和虚功:广义力与广义位移无关时所作的功W=F P ×Δ/2W=F P1×Δ11 /2W=F P2×Δ22 /2W=F P1×Δ12or W=F P2×Δ21变力功(1)质点系的虚位移原理具有理想约束的质点系,在某一位置处于平衡的必要和充分条件是:1P F 2N F 1N F 2P F 1m 2m 二、变形杆件的虚功原理Σf i δr i =0→→.对于任何可能的虚位移,作用于质点系的主动力所做虚功之和为零。
哈工大结构力学题库3

第四章 力 法一 判 断 题1. 图示结构,据平衡条件求出B 点约束力,进而得图示弯矩图,即最后弯矩图。
( )(X )题1图 题2图2. 图示结构用力法求解时,可选切断杆件2,4后的体系作为基本结构。
( )(X )3. 图a 结构,支座B 下沉a 。
取图b 中力法基本结构,典型方程中1C a ∆=-。
( ) (X )题3图 题4图4. 图a 所示桁架结构可选用图b 所示的体系作为力法基本体系。
( )(√)5. 图a 结构,取图为力法基本结构,1C l θ∆=。
( ) (X )题5图 题6图6. 图a 结构的力法基本体系如图b ,主系数3311/(3)/()l EI l EA δ=+。
( )(X )7. 图示结构用力法解时,可选切断1,2,3,4杆中任一杆件后的体系作为基本结构.( )(X )题7图 题9图 8. 图示结构受温度变化作用,已知α,h ,选解除支杆B 为力法基本体系(设B X 向上为正),典型方程中自由项2121()/(4)t a t t l h ∆=--。
( )(X )9. 图a 结构,力法基本体系如图b ,自由项412/(8)P ql EI ∆=-。
( )(X )题10图 题11图10.图示超静定梁在支座转动1A ϕ=时的杆端弯矩26.310AB M KN m =⨯⋅,22( 6.310)EI KN m =⨯⋅。
( )(√) 11. 图a 结构,取图b 为力法基本结构,h 为截面高度,α为线胀系数,典型方程中2121()/(2)t a t t l h ∆=--。
( )(X )题12图 题13图 12. 图a 结构,取力法基本体系如图b 所示,则1/C l ∆=∆( )。
(X )13. 超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
( )(√)14. 图示结构的超静定次数为4。
( )(X )题15图 题16图15. 图示结构,选切断水平杆为力法基本体系时,其3112/(3)h EI δ=。
哈工大结构力学题库3

第四章力法题1图题2图2. 图示结构用力法求解时,可选切断杆件 2,4后的体系作为基本结构。
()(X )3. 图a 结构,支座B 下沉a 。
取图b 中力法基本结构,典型方程中.訂。
二-a 。
()4.图a 所示桁架结构可选用图 b所示的体系作为力法基本体系。
()(2)5.图a 结构,取图为力法基本结构, .-:1C 。
()6.图a 结构的力法基本体系如图 b ,主系数「I =|3/(3EI)|3/(EA 。
() (X )7.图示结构用力法解时,可选切断 1 , 2, 3, 4杆中任一杆件后的体系作为基本结构1.图示结构,据平衡条件求出 B 点约束力,进而得图示弯矩图,即最后弯矩图。
()(X )题5图题6图8.图示结构受温度变化作用,已知:,h ,选解除支杆B 为力法基本体系(设X B 向上为正),典型方程中自由项 厶1t =—a (t 2—tj 2/(4h )。
( )(X ) 9.图a 结构,力法基本体系如图b ,自由项 冷p=_ ql 4/(8EI 2)。
()(EI =6.3 102KN m 2)。
() (V)2-1t - _a(t 2 -11 )l /(2 h)。
()13. 超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
14. 图示结构的超静定次数为 4。
()X T 1--- r£1£/ 'k10.(X )题11图图示超静定梁在支座转动'A =1时的杆端弯矩 M AB =6.3 102KN m ,11. 图a 结构,取图 b 为力法基本结构, 为截面高度,为线胀系数,典型方程中(X )!•>题12图题13图12. 图a 结构,取力法基本体系如图b 所示,(X )()(V)题9图题10图题15图15.图示结构,选切断水平杆为力法基本体系时,其 y =2h 3/(3EI)。
( ) (X )16.图示结构,横杆为绝对刚性,M A=Ph 。
哈工大结构力学考研题库

2
哈工大题库—几何组成分析
【内部资料】
3. 图示体系虽有三个多余约束,但为保证其几何不变,哪两根链杆是不能同时去掉的。
A.a 和 e B. a 和 b C. a 和 c D. c 和 e
(B)
4. 图示体系是
(B)
A.无多余联系的几何不变体系 B.有多余联系的几何不变体系
C.几何可变体系 D.瞬变体系
题7图
题8图
题9图
8. 图示体系的计算自由度为(D)
A.0 B.1 C.-1 D.-2
9. 图中体系是(C)
A.几何可变体系 B.几何瞬变体系 C.无多余联系的几何不变体系
D.有多余联系的几何不变体系
10. 图示平面体系的几何组成为(C)
A.几何不变无多余约束 B.几何不变有多余约束 C.瞬变体系 D.几何可变体系
既然我已经踏上这条道路,那么任何东西都不应妨碍我沿着这条路走下去——康德
4
哈工大题库—几何组成分析
【内部资料】
题 17 图
题 18 图
18. 图示体系为几何不变体系,且其多余联系数目为(D)
A.1 B.2 C.3 D.4
19. 图示体系的几何组成为(B)
A.几何不变无多余约束 B.几何不变有多余约束
C.瞬变体系 D.常变体系
20. 图示平面体系的几何组成性质是(A)
A.几何不变且无多余联系的 B.几何不变且有多余联系的
C.几何可变的 D.瞬变的
题 19 图
题 20 图
题 21 图 题 22 图
题 23 图
21. 图示平面体系的几何组成性质是(A)
A.几何不变且无多余联系的 B.几何不变且有多余联系的
16. 图示体系是(A)
(完整版)哈工大结构力学题库五章
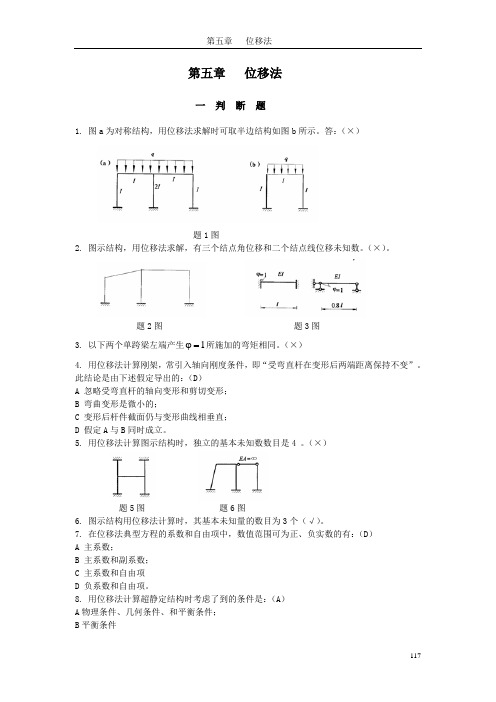
第五章位移法一判断题1. 图a为对称结构,用位移法求解时可取半边结构如图b所示。
答:(×)题1图2. 图示结构,用位移法求解,有三个结点角位移和二个结点线位移未知数。
(×)。
题2图题3图ϕ=所施加的弯矩相同。
(×)3. 以下两个单跨梁左端产生14. 用位移法计算刚架,常引入轴向刚度条件,即“受弯直杆在变形后两端距离保持不变”。
此结论是由下述假定导出的:(D)A 忽略受弯直杆的轴向变形和剪切变形;B 弯曲变形是微小的;C 变形后杆件截面仍与变形曲线相垂直;D 假定A与B同时成立。
5. 用位移法计算图示结构时,独立的基本未知数数目是4 。
(×)题5图题6图6. 图示结构用位移法计算时,其基本未知量的数目为3个(√)。
7. 在位移法典型方程的系数和自由项中,数值范围可为正、负实数的有:(D)A 主系数;B 主系数和副系数;C 主系数和自由项D 负系数和自由项。
8. 用位移法计算超静定结构时考虑了到的条件是:(A)A物理条件、几何条件、和平衡条件;B平衡条件117C平衡条件与物理条件D平衡条件与几何条件9. 规定位移法的杆端弯矩正负时,对杆端而言,以顺时针为正,对结点则以逆时针为正,这一规定也适合于杆端剪力的符号规定。
(×)10. 图a对称结构可简化为图(b)来计算。
(×)题10图题11图11. 图示结构用位移法求解时,基本未知量个数是相同的(√)12. 图示结构用位移法求解时,只有一个未知数(√)题12图题13图题14图13. 图示结构横梁无弯曲变形,故其上无弯矩。
(×)14. 图a对称结构可简化为图b来计算,EI均为常数。
(×)15. 图示结构用位移法求解的基本未知量数目最少为3。
(√)题15图题16图16. 图示结构EI=常数,用位移法求解时有一个基本未知量。
(√)。
17. 位移法中固端弯矩是当其基本未知量为零时由外界因数所产生的杆端弯矩(√)18. 位移法的典型方程与力法的典型方程一样,都是变形协调方程。
哈工大结构力学题库六章

哈⼯⼤结构⼒学题库六章148第六章⼒矩分配法⼀判断题1. 传递系数C 与杆件刚度和远端的⽀承情况有关.( √ )2. ⼒矩分配中的传递系数等于传递弯矩与分配弯矩之⽐,它与外因⽆关.( √ )3. ⼒矩分配法所得结果是否正确,仅需校核交于各结点的杆端弯矩是否平衡.( × )4. ⼒矩分配法经⼀个循环计算后,分配过程中的不平衡⼒矩(约束⼒矩)是传递弯矩的代数和.( √ )5. ⽤⼒矩分配法计算结构时,汇交与每⼀结点各杆端⼒矩分配系数总和为1,则表明⼒矩分配系数的计算绝对⽆错误.( × )6. 在⼒矩分配法中,分配与同⼀结点的杆端弯矩之和与结点不平衡⼒矩⼤⼩相等,⽅向相同.( × )7. ⼒矩分配法是以位移法为基础的渐进法,这种计算⽅法不但可以获得近似解,也可获得精确解.( √ )8. 在任何情况下,⼒矩分配法的计算结构都是近似的.( × ) 9. ⼒矩分配系数是杆件两端弯矩的⽐值.( × )10. 图⽰刚架⽤⼒矩分配法,求得杆端弯矩M CB =-16/2ql ( ×)题10图题11图题12图11. 图⽰连续梁,⽤⼒矩分配法求得杆端弯矩M BC =—M/2.( × ) 12. 图⽰刚架可利⽤⼒矩分配法求解.( √ )13. ⼒矩分配法就是按分配系数分配结点不平衡⼒矩到各杆端的⼀种⽅法.(× ) 14. 在⼒矩分配法中,同⼀刚性结点处各杆端的⼒矩分配系数之和等于1.( √ ) 15. 转动刚度(杆端劲度)S 只与杆件线刚度和其远端的⽀承情况有关.( √ ) 16. 单结点结构的⼒矩分配法计算结果是精确的.( √ ) 17. ⼒矩分配法仅适⽤于解⽆线位移结构.( √ ) 18. ⽤⼒矩分配法计算图⽰结构时,杆端AC 的分配系数29/18=ACµ.(√ )149题18图题19图题21图19. 图⽰杆AB 与CD 的EI,l 相等,但A 端的劲度系数(转动刚度)S AB ⼤于C 端的劲度系数(转动刚度) S CD .( √ )20. ⼒矩分配法计算荷载作⽤问题时,结点最初的不平衡⼒矩(约束⼒矩)仅是交于结点各杆端固端弯矩的代数和.( × )21. 若使图⽰刚架结点A 处三杆具有相同的⼒矩分配系数,应使三杆A 端的劲度系数(转动刚度)之⽐为:1:1:1.( √ )22. 有结点线位移的结构,⼀律不能⽤⼒矩分配法进⾏内⼒分析.( × ) 23. 计算有侧移刚架时,在⼀定条件下也可采⽤⼒矩分配法.(√ )24. 有结点线位移的结构,⼀律不能⽤⼒矩分配法进⾏内⼒分析.( × )⼆选择题1. 图⽰结构汇交于A 的各杆件抗弯劲度系数之和为∑AS,则AB 杆A 端的分配系数为:( B ) A.∑=S A AB ABi /4µB. ∑=S A AB ABi /3µ C. ∑=S A AB ABi /2µD.∑=S A AB ABi /µ题1图题2图 2. 图⽰结构EI=常数,⽤⼒矩分配法计算时,分配系数µ4A 为:( D )A. 4/11B. 1/2C. 1/3D.4/91503. 在图⽰连续梁中,对结点B 进⾏⼒矩分配的物理意义表⽰( D )A. 同时放松结点B 和结点CB. 同时固定结点B 和结点CC. 固定结点B,放松结点CD. 固定结点C,放松结点B题3图题4图4. 图⽰等截⾯杆件,B 端为定向⽀座,A 端发⽣单位⾓位移,其传递系数为( C )A. C AB =1B. C AB =1/2C. C AB =-1D. C AB =05. 等直杆件AB 的转动刚度(劲度系数)S AB :(A )A 与B 端⽀承条件及杆件刚度有关 B 只与B 端的⽀承条件有关C 与A 、B 两端的⽀承条件有关D 只与A 端⽀承条件有关6. 等直杆件AB 的弯矩传递系数C AB :(B )A 与B 端⽀承条件及杆件刚度有关 B 只与B 端的⽀承条件有关C 与A 、B 两端的⽀承条件有关D 只与A 端⽀承条件有关7. 当杆件刚度(劲度)系数S AB =3i 时,杆的B 端为:(C )A ⾃由端B 固定端C 铰⽀承D 定向⽀承8. ⼒矩分配法计算得出的结果(D )A ⼀定是近似解B 不是精确解C 是精确解D 可能为近似解,也可能是精确解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学习目的和要求
目的:工程结构除受静荷载作用外,有时还会受到随 时间迅速变化的动荷载作用,如地震荷载等。 在动荷载作用下,结构发生振动,结构的内力、 位移等将随时间变化。确定它们的变化规律, 从而得到这些量的最大值,以便做出合理的动 力设计是本章的学习目的。
要求:掌握动力自由度的判别方法。掌握单自由度、 有限自由度体系运动方程的建立方法。熟练掌 握单自由度体系、两个自由度体系动力特性的 计算。熟练掌握单自由度体系、两个自由度体 系在简谐荷载作用下动内力、动位移的计算。 掌握阻尼对振动的影响。了解自振频率的近似 计算方法。
13
第一节 结构动力计算概述
4、动力分析体系的自由度
2 体系自由度的简化
1) 集中质量法(lumped mass)
将实际结构的质量看成(按一定规则)集中在某些几何
点上,除这些点之外物体是无质量的。这样就将无限自由度
系统变成一有限自由度系统。
2m l 2m l
6
6
m
2m l 2m l 2m l
l
8
88
5
第一节 结构动力计算概述
2、动荷载及其分类
1 动荷载的定义 结构在大小方向和作用点随时间变化的荷载作用
下,质量运动加速度所引起的惯性力(innertia force)和 荷载相比达到不可忽视的程度时的荷载称为动荷载 (dynamic load)
把荷载看成是静荷载还是动荷载应 结合结构本身的动特性加以判决
输入 (动力荷载)
结构 (系统)
参数识别
输出 (动力反应)
输入 (动力荷载)
结构 (系统)
荷载识别
输出 (动力反应)
11
第一节 结构动力计算概述
3、动力学的任务和内容
第三类问题:由输入、输出和系统求环境识别。 结构振动控制。
输入 (
控制系统 (装置、能量)
6
第一节 结构动力计算概述
2、动荷载及其分类
2 动荷载的分类
确定
周期 非周期
简谐荷载 非简谐荷载
冲击荷载 突加荷载
结构振动分析
动荷载
其他确定规律的动荷载
不确定
风荷载
随机振动分析
地震荷载
其他无法确定变化规律的荷载
7
第一节 结构动力计算概述
2、动荷载及其分类
需要指出的是一种荷载是否作为动荷载并不是一成 不变的,它与结构本身的动特性有关。
位移函数的一般形式
m
n
y(x) aii(x)
y(x) l
i1
a i ---待定参数,即广义坐标
i ( x) ---满足边界条件的基函数
n ---待定参数个数,即自由度数
16
第一节 结构动力计算概述
4、动力分析体系的自由度
2) 广义坐标法( general coordinate)
m
位移函数
结构力学
学习内容
结构动力计算概念,动力计算自由度,建立体系的运动 方程;单自由度体系的自由振动(频率、周期和振幅的计 算);单自由度体系在简谐荷载作用下的的强迫振动(动内 力、动位移计算);阻尼对振动的影响;有限自由度体系的 自由振动(频率、振型及振型正交性);有限自由度体系在 简谐荷载作用下的强迫振动(动内力、动位移计算);频率、 振型的近似计算方法。
为结构动力可靠性设计和健康诊断提供依据。
9
第一节 结构动力计算概述
3、动力学的任务和内容
3 结构动力学的研究内容
第一类问题:由输入求输出的结构动力计 算 响应分析;
输入 (动力荷载)
输出 (动力反应)
结构 (系统)
10
第一节 结构动力计算概述
3、动力学的任务和内容
第二类问题:由输入、输出求结构特性的 系 统识别;
如:风荷载 高耸柔性结构
动载
低矮刚性结构
静载
动荷载周期高于结构周期5倍以上时,动力作用较小,可 按静力计算。
8
第一节 结构动力计算概述
3、结构动力学的任务和内容
1 结构动力学和结构静力学的对比 a.与静力学对比增加了复杂性,需要处理微分问题。 b.动响应不仅与动荷载有关,而且与结构动特性有关。
2 结构动力学的任务 确定结构动特性及结构固有特性与动荷载、动响 应之间的关系; 确定结构在任意荷载作用下进行响应分析的方法。
y(x) l
y(x) asi nx
l m
广义座标 单自由度
i(0)i(l)0
位移函数
l
广义座标
y(x)x2(a1a2x)
二自由度
17
第一节 结构动力计算概述
4、动力分析体系的自由度
3) 有限元法(finite element method)
将结构划分为有限个单元,通过单元分析得到单元刚 度方程,组装成整体刚度矩阵,适当将质量分布于单元结 点上,除这些点之外物体是无质量的。这样就将无限自由 度系统变成一有限自由度系统。
14
第一节 结构动力计算概述
4、动力分析体系的自由度
M
M
m E,A,I
l
l
体系振动自由度为无限自由度
忽略 m
体系振动自由度为三个自由度
忽略转动惯量
忽略轴向运动
体系振动自由度为单自由度
15
第一节 结构动力计算概述
4、动力分析体系的自由度
2) 广义坐标法( general coordinate)
选择一系列满足边界条件的基函数,通过线性组合来 近似体系位移形态,其组合系数称广义座标
12
第一节 结构动力计算概述
4、动力分析体系的自由度
1 动力分析体系的自由度 动力分析的特点是要考虑惯性力,而惯性力取决于
质量分布和运动方向,因此在确定计算简图时,必须确 定质量分布情况,确定质点位移形态。
确定体系质点位移形态所需的 独立参数的个数就称自由度。
实际结构都是无限自由度体系,如按无限自由度体系 分析这不仅导致分析困难,而且从工程角度也没必要,故 必须对结构进行必要的简化。
3
第一节 结构动力计算概述
1、结构动力学的计算特点
1.动力荷载和静力荷载的区别和联系 荷载的大小、方向、作用位置随时间变化?
2.动力计算和静力计算的区别和联系 动是绝对的,静是相对的。区别在于计算中是否考 虑惯性力,由振动引起的内力和位移称动内力和动 位移,它们不仅是位置而且是时间的函数。
3. 动力计算中内力与荷载不能构成静力平衡
利用达朗贝尔原理,引入惯性力,使结构在某一瞬 时处于动平衡状态。可按静力学原理和方法计算结 构在该时刻的内力和位移。
4
第一节 结构动力计算概述
1、结构动力学的计算特点
由于动荷载使结构产生了不容忽视的惯性力, 其作用完全不能等同于将动载看作静载计算 所得的量值;这反映了动载对结构更为不利 的一面,对规模较大、较复杂的结构,尤其 需要慎重考虑,合理地设计承受动力荷载的 结构。