哈工大结构力学 ppt课件
结构力学(全套课件131P) ppt课件
的两根链杆的杆轴可以平行、交叉,或延长线交于
一点。
当两个刚片是由有交汇点的虚铰相连时,两个刚
片绕该交点(瞬时中心,简称瞬心)作相对转动。
从微小运动角度考虑,虚铰的作用相当于在瞬时
中心的一个实铰的作用。
19
20
规则二 (三刚片规则): 三个刚片用不全在一条直线上的三个单铰(可以
是虚铰)两两相连,组成无多余约束的几何不变体 系。
两个平行链杆构成沿平行方向上的无穷远虚铰。
三个刚片由三个单铰两两相连,若三个铰都有交 点,容易由三个铰的位置得出体系几何组成的结论 。当三个单铰中有或者全部为无穷远虚铰时,可由 分析得出以下依据和结论:
1、当有一个无穷远虚铰时,若另两个铰心的连 线与该无穷远虚铰方向不平行,体系几何不变;若 平行,体系瞬变。
3、通过依次从外部拆除二元体或从内部(基础、 基本三角形)加二元体的方法,简化体系后再作分 析。
41
第一部分 静定结构内力计算
静定结构的特性: 1、几何组成特性 2、静力特性 静定结构的内力计算依据静力平衡原理。
第三章 静定梁和静定刚架
§3-1 单 跨 静 定 梁
单跨静定梁的类型:简支梁、伸臂梁、悬臂梁 一、截面法求某一指定截面的内力
15
1、单约束(见图2-2-2) 连接两个物体(刚片或点)的约束叫单约束。
1)单链杆(链杆)(上图) 一根单链杆或一个可动铰(一根支座链杆)具
有1个约束。 2)单铰(下图)
一个单铰或一个固定铰支座(两个支座链杆) 具有两个约束。 3)单刚结点
一个单刚结点或一个固定支座具有3个约束。
16
2、复约束 连接3个(含3个)以上物体的约束叫复约束。
三、对体系作几何组成分析的一般途径
哈工大结构力学精品课件
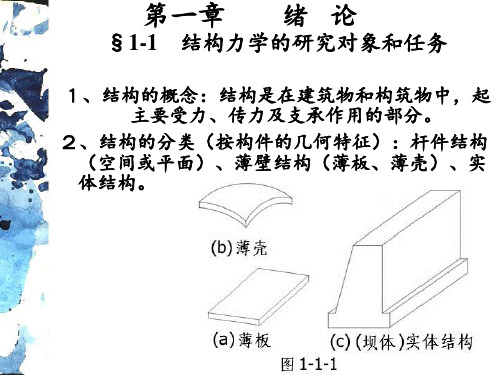
结构力学张金生绪论§1 . 结构力学的内容和任务一.对象结构分为:杆系结构,板壳结构,实体结构三.内容 结构组成;内力,位移,临界力计算.二.任务 研究结构的刚度,强度,稳定性的 计算原理和计算方法结构:承受并传递荷载的骨架部分确定计算简图的原则: 1.能反映实际结构的主要力学特性;2.分析计算尽可能简便§2 . 杆件结构的计算简图计算简图:在结构分析当中用来代替实际结构的计算模型(图形)简化内容:1.杆件的简化: 杆件 杆件的轴线2.结点的简化: 刚结点 铰结点 半铰结点(组合结点)半铰结点铰结点刚结点确定计算简图的原则:1.能反映实际结构的主要力学特性;2.分析计算尽可能简便§2 . 杆件结构的计算简图计算简图:在结构分析当中用来代替实际结构的计算模型(图形)简化内容: 1.杆件的简化: 杆件 杆件的轴线2.结点的简化: 刚结点 铰结点 半铰结点(组合结点)3.支座的简化: 固定铰支座 可动较支座 固定端支座 滑动支座(定向支座)确定计算简图的原则:1.能反映实际结构的主要力学特性;2.分析计算尽可能简便§2 . 杆件结构的计算简图计算简图:在结构分析当中用来代替实际结构的计算模型(图形)简化内容: 1.杆件的简化: 杆件 杆件的轴线2.结点的简化: 刚结点 铰结点 半铰结点(组合结点)3.支座的简化: 固定铰支座 可动较支座 固定端支座 滑动支座(定向支座)4.体系的简化: 空间结构 平面结构确定计算简图的原则:1.能反映实际结构的主要力学特性;2.分析计算尽可能简便§2 . 杆件结构的计算简图计算简图:在结构分析当中用来代替实际结构的计算模型(图形)简化内容: 1.杆件的简化: 杆件 杆件的轴线2.结点的简化: 刚结点 铰结点 半铰结点(组合结点)3.支座的简化: 固定铰支座 可动较支座 固定端支座 滑动支座(定向支座)4.体系的简化: 空间结构 平面结构5.荷载的简化: 集中力、集中力偶、分布荷载§3 . 杆件结构的类型1.梁2.拱3.桁架4.刚架5.组合结构第一章杆件体系的几何组成分析(Geometric construction analysis)§1. 几何组成分析本章假定:所有杆件均为刚体§1-1 基本概念一. 几何不变体系几何可变体系几何可变体系不能作为建筑结构结构必须是几何不变体系本章目的:判定一个体系是否能作为结构结构是如何构造的几何形状不能变化的平面物体几何不变体系的自由度一定等于零几何可变体系的自由度一定大于零§1. 几何组成分析§1-1 基本概念一. 几何不变体系几何可变体系二. 刚片几何形状不能变化的平面物体三. 自由度确定体系位置所需的独立坐标数四. 约束(联系) 能减少自由度的装置1. 链杆2. 单铰§1. 几何组成分析§1-1 基本概念一. 几何不变体系 几何可变体系二. 刚片 几何形状不能变化的平面物体 三. 自由度 确定体系位置所需的独立坐标数四. 约束(联系) 能减少自由度的装置1. 链杆 2. 单铰 3. 链杆与单铰的关系4. 虚铰3. 链杆与单铰的关系4. 虚铰§1. 几何组成分析2. 单铰 5. 复铰1. 链杆连接N 个刚片的复铰相当于N-1个单铰§1. 几何组成分析§1-1 基本概念一. 几何不变体系 几何可变体系二. 刚片 几何形状不能变化的平面物体 三. 自由度 确定体系位置所需的独立坐标数四. 约束(联系) 能减少自由度的装置五. 计算自由度0632=−×=W 02936=×−×=W 032333=−×−×=W§1. 几何组成分析五. 计算自由度0632=−×=W 08936=×−×=W 032333=−×−×=W 链杆数单铰数刚片数链杆数结点数−×−×=−×=232W W 计算自由度大于零一定可变;若等于零则一定不变吗§1. 几何组成分析五. 计算自由度链杆数单铰数刚片数链杆数结点数−×−×=−×=232W W 计算自由度大于零一定可变;若等于零则一定不变吗六. 多余约束 必要约束计算自由度小于零一定不变吗计算自由度小于零一定有多余约束§1. 几何组成分析§1-1 基本概念一. 几何不变体系几何可变体系二. 刚片三. 自由度四. 约束(联系) 链杆单铰复铰虚铰实铰五. 计算自由度六. 多余约束必要约束P N=构成无多余约束的几何不变体系构成无多余约束的几何不变体系.§1. 几何组成分析§1-2 无多余约束的几何不变体系的组成规则一. 三刚片规则二元体:在一个体系上用两个不共线的链杆连接一个新结点的装置.二. 两刚片规则在一个体系上加减二元体不影响原体系的机动性质.三. 二元体规则§1. 几何组成分析§1-1 基本概念§1-2 无多余约束的几何不变体系的组成规则§1-3 几何组成分析举例例1: 对图示体系作几何组成分析解: 三刚片三铰相连,三铰不共线,所以该体系为无多余约束的几何不变体系.§1. 几何组成分析§1-3 几何组成分析举例例2: 对图示体系作几何组成分析解:该体系为无多余约束的几何不变体系.方法1: 若基础与其它部分三杆相连,去掉基础只分析其它部分例3: 对图示体系作几何组成分析解: 该体系为无多余约束的几何不变体系.方法2: 利用规则将小刚片变成大刚片.例4: 对图示体系作几何组成分析解: 该体系为瞬变体系.方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.例5:对图示体系作几何组成分析解: 该体系为常变体系.方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法4: 去掉二元体.例6:对图示体系作几何组成分析解: 该体系为无多余约束几何不变体系.方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.例7: 对图示体系作几何组成分析方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.解: 该体系为有一个多余约束几何不变体系.练习: 对图示体系作几何组成分析方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.练习: 对图示体系作几何组成分析方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.方法1: 若基础与其它部分三杆相连,去掉基础只分析其它部分练习: 对图示体系作几何组成分析方法3: 将只有两个铰与其它部分相连的刚片看成链杆.方法2: 利用规则将小刚片变成大刚片.方法5: 从基础部分(几何不变部分)依次添加.方法4: 去掉二元体.几何组成思考题§几何组成分析的假定和目的是什麽?§何谓自由度?系统自由度与几何可变性有何联系?§不变体系有多余联系时,使其变成无多余联系几何不变体系是否唯一?§瞬变体系有何特点?可变体系时如何区分瞬变还是常变?§瞬铰和实际铰有何异同?§无多余联系几何不变体系组成规则各有什麽限制条件?不满足条件时可变性如何?§按组成规则建立结构有哪些组装格式?组装格式和受力分析有无联系?§如何确定计算自由度?§对体系进行组成分析的步骤如何?几何组成作业题§1-1 b c§1-2 a d g h i j k l §交作业时间:本周 5§1. 几何组成分析作业:1-1 (1-1 (b)b)试计算图示体系的计算自由度 解:由结果不能判定其是否能作为结构1321138−=−×−×=W 110222531−=−×−×+×=W 或:§1. 几何组成分析作业:1-1 (c)试计算图示体系的计算自由度解:由结果可判定其不能作为结构131216=−×=W 13240328=−×−×=W 或:§1. 几何组成分析作业:1-2 (a)试分析图示体系的几何组成从上到下依次去掉二元体或从基础开始依次加二元体.几何不变无多余约束§1. 几何组成分析作业:1-2 (d)试分析图示体系的几何组成依次去掉二元体.几何常变体系§1. 几何组成分析作业:1-2 (f)试分析图示体系的几何组成有一个多余约束的几何不变体系§1. 几何组成分析作业:1-2 (h)( i)试分析图示体系的几何组成瞬变体系几何不变无多余约束作业:试分析图示体系的几何组成有一个无穷远铰:四杆不平行不变平行且各自等长常变平行不等长瞬变§1. 几何组成分析作业:1-2 (j)试分析图示体系的几何组成瞬变体系§1. 几何组成分析L)试分析图示体系的几何组成1-2 (L)作业:1-2 (几何不变无多余约束§1. 几何组成分析例:试分析图示体系的几何组成瞬变体系§1. 几何组成分析练习:试分析图示体系的几何组成几何不变无多余约束一个单刚结点相当于三个约束.单刚结点与其它约束的关系:复刚结点:刚片复刚结点相当于练习:试分析图示体系的几何组成无多余约束几何不变体系有两个多余约束的几何不变体系练习:试分析图示体系的几何组成无多余约束几何不变体系无多余约束的几何不变体系。
哈工大·结构力学(32学时) 课件 3.2-三铰拱
例 :试求图示抛物线 y 4 fx(l x) / l 2 三铰拱距左支座5m的截面内力
解:一、先求支座反力 1、取整体为分离体
m (F ) 0
B
FAy 20m 200kN.m 20 10 15kN.m 0
整理可得
FAy 160kN
2、取AC为分离体
m (F ) 0
0
合理拱轴线
合理拱轴线:拱在给定荷载作用下只产生
轴力的拱轴线被称为 与该荷载对应的合理 拱轴线,当拱轴线为合理拱轴线时,拱截面 上只受压力(弯矩和剪力均为零)
作业:
3-7;3-9
小结:
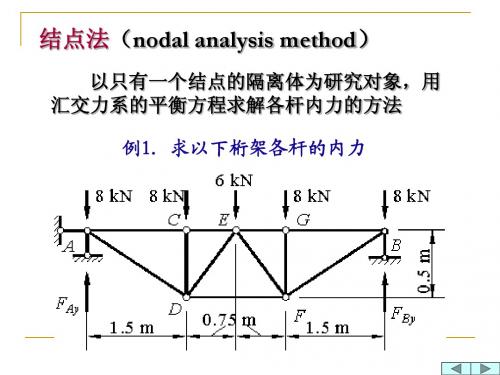
以结点作为平衡对象,结点承受汇交力系 作用。
按与“组成顺序相反”的原则,逐次建立 各结点的平衡方程,则桁架各结点未知内 力数目一定不超过独立平衡方程数。
由结点平衡方程可求得桁架各杆内力。
在用结点法进行计算时,注意以下三点,可 使计算过程得到简化。
1. 对称性的利用 如果结构的杆件轴线对某轴(空间桁架为某 面)对称,结构的支座也对同一条轴对称的静 定结构,则该结构称为对称结构 (symmetrical structure)。 对称结构在对称或反对称的荷载作用下,结 构的内力和变形(也称为反应)必然对称或反 对称,这称为对称性(symmetry)。
n m 1 3 A 2.5FP FP 4 n2m FP FP B FP FP 6m
6 5m
2.5FP
截面单杆
FN1 =-3.75FP FN2 =3.33FP FN4=0.65FP
截面法取出的隔离体,不管其 上有几个轴力,如果某杆的轴力可以通过列一 个平衡方程求得,则此杆称为截面单杆。可能 的截面单杆通常有相交型和平行型两种形式。
01 哈工大 结构力学

M 2
M 2
16 / 47
哈工大 土木工程学院
1. 简支梁弯矩叠加法
MA FP
MB
复杂的弯矩图是由几 个简单的图形合成的 做法:
MB
先在梁端绘弯矩竖标 过竖标顶点连直虚线
MA
FP l 4
MA
MB
以虚线为基础叠加相应 简支梁弯矩图
哈工大 土木工程学院
17 / 47
MA
FP
MB
注意:
①弯矩图叠加是竖标相加,不 是图形的拼合; ②要熟练地掌握简支梁在跨中 荷载作用下的弯矩图; ③利用叠加法可以少求或不求 反力,就可绘制弯矩图; ④利用叠加法可以少求控制截 面的弯矩; ⑤问题越复杂外力越多,叠加 法的优越性越突出。
D
C
1 q( l x ) 2
A
B
哈工大 土木工程学院
38 / 47
q A l B x D l-x l D C C
1 1 2 q( l x ) x qx 2 2
A
B
1 q( l x ) 2 8
令
q( l x ) 1 2 1 2 x qx ql x 2 2 8
x 0.172 l
哈工大 土木工程学院
3 / 47
静定结构分类
两刚片结构 按其构造特点
三刚片结构
基附型结构
静定结构分析方法
1 由几何构造特点确定计算途经;
2 用截面法,通过平衡方程计算内力和反力;
3 使用叠加原理。在线弹性、小变形假设下结构 上所有荷载作用产生的效果等于每一荷载单独 作用产生的效果之代数和。
哈工大 土木工程学院
l FAx
FAy Mk FNk FQk
哈尔滨工业大学 11 结构力学—— 结构的极限荷载-PPT文档资料

k F Pu F [ F ] 塑性设计时的荷载条件: Pw Pu k
哈工大 土木工程学院
4
17 结构的塑性分析和极限荷载
理想弹塑性材料假设:
• 在OA段线性,满足 E
• 在 AB 段应力达到屈服, 材料进入塑性流动;
s
A
C
B
E • 在C点卸载,满足
加载时是弹塑性,卸载时是弹性。
17 结构的塑性分析和极限荷载
HARBIN INSTITUTE OF TECHNOLOGY
结构力学
土木工程学院
工程力学学科组 李强
哈工大 土木工程学院
1
17 结构的塑性分析和极限荷载
§17.1 极限荷载的概述
此前主要讨论结构的弹性分析: • • • 假定应力应变关系是线性的; 荷载卸去后,结构无任何残余变形; 应力达到材料的极限应力即认为结构将 破坏; 正常使用条件下弹性计算能给出足够准 确的结果; 以弹性极限作为设计依据的设计方法称 弹性设计法。
• 塑性铰只能沿极限弯矩方向发生有限转角;
• 截面弯矩一旦小于极限弯矩(卸载),塑性铰即消失。
塑性铰与普通铰的差别:
1.塑性铰可承受极限弯矩~普通铰不承担弯矩 2.塑性铰是单向的~普通铰是多向铰 3.塑性铰卸载时消失~普通铰与荷载无关 4.塑性铰随荷载分布可出现于不同截面~普通铰位置固定
哈工大 土木工程学院
哈工大 土木工程学院
3
17 结构的塑性分析和极限荷载
为弥补弹性设计法的不足,进一步挖掘结构的承载 能力,给达到弹性极限的结构继续施加同样形式的 荷载,直至结构破坏。 • 结构所能够承担的最大荷载叫作极限荷载;
• 结构即将达到破坏时的状态称作极限状态;
哈工大结构力学课件.pdf

第三章静定结构的位移计算Displacement of Statically Determinate Structures1. 弹性杆件的变形与变形能计算2. 变形体虚功原理3. 单位荷载法4. 图乘法5. 其他外因引起的位移计算6. 互等定理7. 结论与讨论1 结构位移计算概述一、结构的位移 (Displacement of Structures)x Δy ΔA A ′βF P 线位移,角位移,相对线位移、角位移等统称广义位移线位移角位移DC ΔΔ+相对线位移CD D ΔC ΔαF P γ相对角位移γα +制造误差 δ 等铁路工程技术规范规定: 二、 计算位移的目的引起结构位移的原因(1) 刚度要求如:荷载、温度改变 ΔT 、支座移动 Δc 、在工程上,吊车梁允许的挠度< 1/600 跨度;桥梁在竖向活载下,钢板桥梁和钢桁梁最大挠度 < 1/700 和1/900跨度高层建筑的最大位移< 1/1000 高度。
最大层间位移< 1/800 层高。
(3)理想联结 (Ideal Constraint)。
三、 本章位移计算的假定(2) 超静定、动力和稳定计算(3)施工要求叠加原理适用(principle of superposition)(1) 线弹性 (Linear Elastic),(2) 小变形 (Small Deformation),返首2 变形体虚功原理 (Principle of Virtual Work)一、功(Work)、实功(Real Work)和虚功(Virtual Work)两种状态力状态位移状态F P F P /2F P /2(虚)力状态(虚力状态)(虚位移状态)无关(虚)位移状态q注意:(1)属同一体系;(2)均为可能状态。
即位移应满足变形协调条件;力状态应满足平衡条件。
(3)位移状态与力状态完全无关;一些基本概念:实功:广义力在自身所产生的位移上所作的功功:力×力方向位移之总和广义力:功的表达式中,与广义位移对应的项功:广义力×广义位移之总和虚功:广义力与广义位移无关时所作的功W=F P ×Δ/2W=F P1×Δ11 /2W=F P2×Δ22 /2W=F P1×Δ12or W=F P2×Δ21变力功(1)质点系的虚位移原理具有理想约束的质点系,在某一位置处于平衡的必要和充分条件是:1P F 2N F 1N F 2P F 1m 2m 二、变形杆件的虚功原理Σf i δr i =0→→.对于任何可能的虚位移,作用于质点系的主动力所做虚功之和为零。
哈工大 结构力学51页PPT

35、不要以为自己成功一次就可以了 ,也不 要以为 过去的 光荣可 以被永 远肯定 。
哈工大 结构力学
31、别人笑我太疯癫,我笑他人看不 穿。(名 言网) 32、我不想听失意者的哭泣,抱怨者 的牢骚 ,这是 羊群中 的瘟疫 ,我不 能被它 传染。 我要尽 量避免 绝望, 辛勤耕 耘,忍 受苦楚 。我一 试再试 ,争取 每天的 成功, 避免以 失败收 常在别 人停滞 不前时 ,我继 续拼搏 。
66、节制使快乐增加并使享受加强。 ——德 谟克利 特 67、今天应做的事没有做,明天再早也 是耽误 了。——裴斯 泰洛齐 68、决定一个人的一生,以及整个命运 的,只 是一瞬 之间。 ——歌 德 69、懒人无法享受休息之乐。——拉布 克 70、浪费时间是一桩大罪过。——卢梭
哈尔滨工业大学 04 结构力学——平面有限元1

1 Nj 2A(aj bjxcjy)
单元形函数
1
Nk2A(akbkxcky)
哈工大 土木工程学院
26
第五章 平面问题有限元分析
uN iu iN jujN ku k
vN iviN jvjN kvk
u v
Ni 0
0 Ni
Nj 0
0 Nj
Nk 0
dNe
三角形单元共有6个结点位移,所以有6个自由度。 故选位移模式:
u12x3y v46x6y
d
u
v
1 0
x 0
y 0
结点坐标矩阵
N0
哈工大 土木工程学院
待定系数
广义坐标
1
2
0 1
0 x
0 y
3 4
5-1-2 平面问题的总势能表达式
E P1 2A T d A A F b T d d A
S F S T d d S F e T e
哈工大 土木工程学院
16
第五章 平面问题有限元分析 §5-2 常应变三角形单元
5-2-1 单元结点位移和结点力
三角形单元
12N2u
yk3
ve
vvij
1 1
xi xj
vk 1 xk
yi yj
54N2v
yk6
1 xi D 1 xj
1 xk
yi yj 2A yk
i j k 保证三角形面积为正
zx 0
zy 0
哈工大 土木工程学院
三个应变分 量只发生在 xy面上,故 称平面应变 问题。
5
ppt版本哈工大版理论力学课件全套
于是合力偶矩的大小和方向可由下式确定:
cos(M,i)
Mx
M
M (Mx)2 (M y)2 (Mz)2
cos(M,j) M y M
cos(M,k) M z M
理论力学
27
[例]工件如图所示,它的四个面上同时钻五个孔,每个孔所受的切削力偶 矩均为80N·m。求工件所受合力偶的矩在x,y,z轴上的投影Mx,My,Mz, 并求合力偶矩矢的大小和方向。 解:将作用在四个面上的力偶 用力偶矩矢表示,并平移到A点。
Fx
O
y
ax y
Fy
Fxy
x
Fx
b
M y(F) zFx xFz
M z(F) xFy yFx
理论力学
18
3、力对点的矩与力对过该点的轴的矩的关系 比较力对点的矩和力对轴的矩的解析表达式得:
[MO(F)]x M x(F) [MO(F)]y M y(F) [MO(F)]z M z(F)
即:对点的矩矢在通过该点的某轴上的投影, 等c2
cosj a a2 b2
M y(F) 0
Mz(F) Mz(Fx)Mz(Fy)Mz(Fz) Fya
理论力学
21
[例]如图所示,长方体棱长为a、b、c,力F沿BD,求力F对AC之矩。
解: MAC(F) MC(F) AC
MC(F) Fcosa a
Fba a2 b2
空间任意力系平衡的必要与充分条件为:力系中各力在三个 坐标轴上投影的代数和等于零,且各力对三个轴的矩的代数 和也等于零。上式即为空间任意力系的平衡方程。
理论力学
40
二、空间约束类型
理论力学
41
理论力学
42
[例]图示三轮小车,自重G=8kN,作用于E点,载荷F1=10 kN,作用于C点。 求小车静止时地面对车轮的约束力。 解:以小车为研究对象,主动力和约束反力组成空间平行力系,受力 分析如图。
哈工大结构力学(I)--结构静力分析篇(刚架)@@

FP C
FCy
FP C
FCx
A
B
A
FNAB
两刚片型结构(1)
哈工大 土木工程学院
8 / 57
第二章 静定结构受力分析
例:计算刚架的支座反力
• 负C号说明假设方向
与实际方向相反B;
q
•q
用对B点取矩校核满 足;
l
• 避免A解联立方程;
FAx
FAy
• 避免错误l 继承; • 熟练后提倡心算
∑X = 0 ∑mA = 0 ∑Y = 0
第二章 静定结构受力分析
练习: 试找出图示结构弯矩图的错误
C
B
B
C
A
M
M
A
D
哈工大 土木工程学院
40 / 57
第二章 静定结构受力分析
FP
FP 练习绘制内力图
q
M
M
q
FP
MM
哈工大 土木工程学院
41 / 57
第二章 静定结构受力分析
4、刚架剪力图和轴力图的绘制
弯矩图
取杆件作隔离体
剪力图 取结点作隔离体
FCx
MC 0
f2 (FAx , FAy ) 0 FAx , FAy
FAx
A FAy
哈工大 土木工程学院
B FBy
14 / 57
第二章 静定结构受力分析
FP
C
FP C FCy FCx
A
B
双截面法(2)
MA 0 g1(FCx , FCy ) 0 MB 0 g2 (FCx , FCy ) 0
哈工大 土木工程学院
46 / 57
第二章 静定结构受力分析
练习:由弯矩图绘制结构剪力图和轴力图
哈尔滨工业大学 05 结构力学——平面有限元幻灯片PPT

哈工大 土木工程学院
11 / 59
第五章 平面问题有限元分析
4、两类座标系之间导数的变换关系
x
x
y
y
x
x
y
y
xx yyyx
哈工大 土木工程学院
12 / 59
第五章 平面问题有限元分析
由
ii 8 81 1 N N ii x xii ii 8 81 1 N N ii y yii y x
2、计算低阶母元形函数在新增结点处的值。
哈工大 土木工程学院
18 / 59
第五章 平面问题有限元分析
3、对低阶母元角顶结点形函数进行“它点为零” 的修正。
哈工大 土木工程学院
19 / 59
第五章 平面问题有限元分析
图形变换
位移场
哈工大 土木工程学院
20 / 59
第五章 平面问题有限元分析
1、6结点三角形等参元
利用母单元形函数和单元结点位移建立子单元的 位移场。
进而利用势能原理进行一定的数学推导,建立 等参元的单元刚度方程
哈工大 土木工程学院
3 / 59
第五章 平面问题有限元分析
5-5-1 基本概念
1、实际单元几何形状的描述-图形变换
以任意四边形为例来说明概念
4
3
4(x4,y4)
3(x3,y3)
1
1
11
第五章 平面问题有限元分析
哈尔滨工业大学 05 结构 力学——平面有限元幻灯
片PPT
本课件PPT仅供大家学习使用 学习完请自行删除,谢谢! 本课件PPT仅供大家学习使用 学习完请自行删除,谢谢! 本课件PPT仅供大家学习使用 学习完请自行删除,谢谢! 本课件PPT仅供大家学习使用 学习完请自行删除,谢谢!
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.5 2m
( M 图 kN. m )
2m
1m 1m
十二、求图示桁架a,b杆的轴力。
4F
2F b a
2d
10.5F
4 1.5d
十三、图示结构K截面剪力为 0.5kN 。
K 1m 1m
2m
2m
十四、图示结构中AC杆的轴力NAC -3 2/2 kN 。
2kN/m C 3m A
3m
3m
。
F/2 F
F/2 A
a/4
a/4
a/4 M
a/4 B
a
六、改正图示结构的M图。
m/2
m/4
m
m/2 2a
a
a
Fa
F
0.5 Pa
1.5 Fa
1.5 FPa
1.5a
2.5a
1.5a
2F
1a 1a
七、图示桁架C杆的内力是 F
c
a
F
a
a
a aa
八、图示结构A端的弯矩(以下边受拉为正) MAC为: A: -Fl B: Fl C: -2Fl D: 2Fl
哈工大结构力学
习题讨论
一、对图示体系进行几何组成分析。 几无 何多 不余 变约 体束 系的
几 何 可 变 体 系
二、图示结构跨中截面的弯矩 (下侧受拉为正)是:
A: ql2 8cos, B: ql2 8cos
C: ql2 8coห้องสมุดไป่ตู้2 , D: ql2 8cos2
q
B
A
C
l/2
l/2
(C)
三、图示结构MA、 MC (以下边受拉为正)为:
F
Fl
Fl
A
C
l
l
(D)
九、图示结构中,N F E _ 4F_ , N F D _ 0_ .
A B
F CE
G a
D
F
aaaa
十、试作图示结构M图,并求二力杆的轴力。
qa2/2
qa2/2 a
-qa/2 - 2 qa/2
3qa2/2
a
a
q qa2/8
qa/2
十一、试作图示结构的M 图。
10kN/m 2.5
A: MA = 0, MC =Fa/2 ; B: MA = 2Fa, MC = 2Fa ; C: MA =Fa, MC =Fa ; D: MA = -Fa, MC = Fa .
F C
A
B a
a
a
a
(C)
四、图示结构在所示荷载作用下正确的弯矩图形状 是( D )。
m
m
(A)
(B)
(C)
(D)
五、图示结构AB杆A端的剪力FQAB为 -M/a