虚拟现实复习资料(1)汇总
虚拟现实知识汇总
虚拟现实知识汇总目录虚拟现实知识汇总 (1)1 虚拟现实的世界背景 (1)2 虚拟现实是什么 (1)3 虚拟现实设备的技术指标 (3)3.1延时 (3)3.2屏幕分辨率和尺寸 (4)3.3透镜 (5)3.4兼容性 (5)3.5整机重量 (6)3.6 SDK!SDK!SDK!重要的事情说三遍 (6)4 关于Oculus CV1屏幕参数分析依据 (6)1 虚拟现实的世界背景随着2014年3月Facebook用20亿美金收购Oculus虚拟现实创业公司,虚拟现实技术重新出现的在人们的视野之中。
随着计算机技术的高速发展,计算机能够更加高速的进行大量运算,从而能够迅速的产生大量复杂的图像,使得高沉浸感的虚拟现实效果成为可能。
2014到2015国外目前已知的就有十几家处于创业研发阶段的公司。
这个情景和1994年的互联网发展的时候非常类似,但是国内已知具有工程样机以及具有自主VR应用的公司也寥寥无几。
2 虚拟现实是什么目前阶段的虚拟现实技术主要是模拟现实中的视觉和听觉信息,达到一定程度上的虚拟现实的效果。
人的头部或者身体动作的运动可以被捕捉,计算机根据人体的动作实时更新图像。
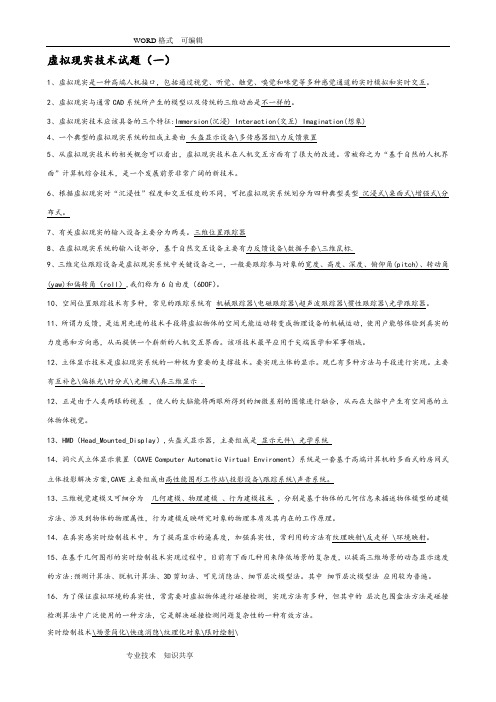
一个具体的例子是:当我们的头部转动的时候,我们眼前的图像的视角也随之转动,模拟现实中的效果,如图一所示。
也为了比较好的虚拟现实中效果,图像和音频信息的变化应该和电脑的工作机制匹配。
前几年,由于运算速度等技术因素导致图像的更新速度较慢,延迟达到了100ms,使得大脑产生较大的不适应感,许多人会因此感觉到头晕。
现在,随着计算机速度的提高,目前延迟达到了20ms, 基本解决了困扰了虚拟现实几十年的眩晕的问题。
人脑产生立体感的原因是因为双眼的观察角度和位置不同,经过大脑的处理得到立体的图像。
因为计算机在输出图像的时候,也是模拟双眼的位置和角度,对左右眼产生相应的图像,如图二所示。
最后在大脑中产生立体的效果。
图一图二技术框架:微处理器通过IMU(惯性测量单元)从得到头部的位置信息,通过USB端口传输到计算机中,计算机得到信息后实时计算生成新的图像之后输送虚拟现实头盔的中的显示屏中,最终到达大脑。
OUC虚拟现实复习资料整理
分布式虚拟现实和网游的区别分布式虚拟现实系统的特征①共享的虚拟工作空间;②伪实体的行为真实感;③支持实时交互,共享时钟;④多个用户以多种方式相互通信;⑤资源信息共享以及允许用户自然操作环境中对象。
网络游戏中一般不具备③④⑤这几点特征。
网络游戏一般不具备交互性,一般只加入了视觉和声音,对于触觉元素往往没有加入,这也是网游和虚拟现实的重要区别。
三维虚拟声音和立体声音的区别三维虚拟声音的特征1.全向三维定位特性:在三维虚拟空间中把实际声音信号定位到特定虚拟专用源的能力。
2.三维实时跟踪特性:在三维虚拟空间中实时跟踪虚拟声源位置变化或景像变化的能力。
3.沉浸感与交互性:产生身临其境的感觉。
立体声是指具有立体感的声音。
它是一个几何概念,指在三维空间中占有位置的事物。
因为声源有确定的空间位置,声音有确定的方向来源,人们的听觉有辨别声源方位的能力。
特别是有多个声源同时发声时,人们可以凭听觉感知各个声源在空间的位置分布状况。
从这个意义上讲,自然界所发出的一切声音都是立体声。
如雷声火车声枪炮声风声雨声等等......当我们直接听到这些立体空间中的声音时,除了能感受到声音的响度、音调和音色外,还能感受到它们的方位和层次。
这种人们直接听到的具有方位层次等空间分布特性的声音,称为自然界中的立体声。
区别:三维虚拟声音在虚拟场景中的能使用户准确地判断出声源精确位置、符合人们在真实境界中听觉方式的声音系统,但是立体声音却做不到这一点。
虚拟现实复习资料第一章虚拟现实的定义:"Virtual Reality"(虚拟现实)或"Virtual Environment"(虚拟环境)是人工构造的,用计算机实时生成(模拟)的能给人视觉、听觉、触觉、嗅觉和味觉等多种感官刺激的实时人机交互系统,存在于计算机内部的环境。
用户应该能够以自然的方式与这个环境交互(包括感知环境并干预环境),从而产生置身于相应的真实环境中的虚幻感,沉浸感,身临其境的感觉。
虚拟现实考试
第一章:虚拟现实技术概论1、什么是虚拟现实技术?虚拟现实技术是一种高端人机接口,包括通过视觉、听觉、触觉、嗅觉、和味觉等多种感觉通道的(实时模拟和实时交互)。
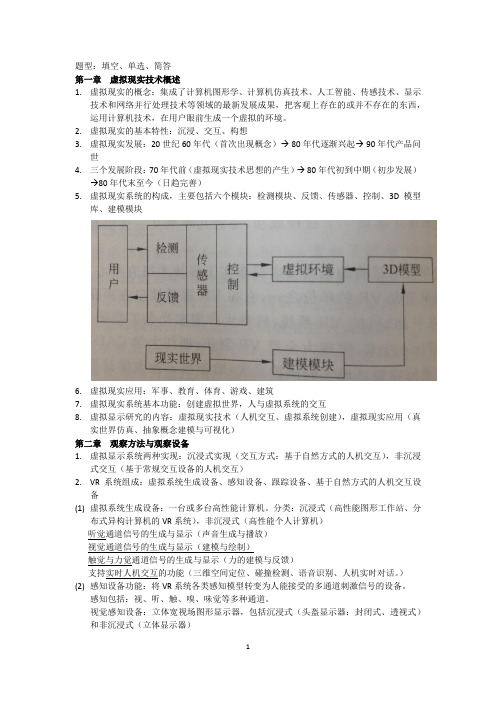
2、虚拟现实现实之父(Ivan Sutherland),也是计算机图形学之父3、虚拟现实技术的发源地是(美国)??4、世界上第一套虚拟演播室由(美国)生产??5、虚拟现实技术的三大特性:沉浸性,交互性、想象性6、虚拟现实系统的组成:计算机、输入输出设备、应用软件和数据库等、7、虚拟现实系统的分类:沉浸式虚拟现实系统、桌面式虚拟现实系统、增强式虚拟现实系统、分布式虚拟现实系统第二章:虚拟现实系统的硬件设备1、虚拟现实系统中硬件设备由三个部分组成:(输入设备、输出设备、生成设备)2、有关虚拟现实系统的输入设备主要分为两类:(基于自然的交互设备、三维定位跟踪设备)3、基于自然的交互设备又分为:(数据手套、运动跟踪系统、三维控制器、三维扫描仪)4、数据手套主要的生产公司有:(VPL公司的数据手套、Vertex公司的赛伯手套、Exos公司的灵巧手手套、Mattel公司的Power Glove)5、三维定位跟踪系统包括:(电磁跟踪系统、声学跟踪系统(成本最低)、光学跟踪系统、机械跟踪系统、惯性位置跟踪系统)6、虚拟系统的输出设备主要有:(视觉感知设备、听觉感知设备、触觉(力觉)感知设备)7、视觉感知设备的典型应用:(台式立体显示系统、头盔显示器、吊杆式显示器、洞穴式立体显示装置、响应工作台显示装置、墙式立体显示装置)8、头盔显示器(HMD)主要组成是:(显示器)和(光学透镜)9、洞穴式立体显示装置(CAVE)主要包括:(专业虚拟现实工作站、多通道立体投影系统、虚拟现实多通道立体投影软件系统、房间式立体成像系统)10、响应工作台显示装置(RWB)主要组成有:(投影显示器、反射镜、即做桌面又做显示屏的特殊玻璃)11、虚拟世界的生成设备有:基于高性能个人计算机、基于高性能图像工作站、超级计算机第三章:虚拟现实系统的相关技术1、立体显示技术是虚拟现实技术的一种极为重要的支撑技术,要实现立体的显示,现在有多种方法和手段实现,主要有:(彩色眼镜法、偏振光眼镜法、串行式立体显示法、裸眼立体显示实现技术)2、在真实感事实绘制技术中为了提高显示的逼真度加强真实性常采用的方法有:(纹理映射、环境映射、反走样)3、三维虚拟声音的主要特征:(全向三维定位特性、三维实时跟踪特性、沉浸感与交互性)4、(层次包围盒法)是碰撞检测算法中广泛使用的一种方法、它是解决碰撞检测问题固有时间复杂性的一种有效方法。
虚拟现实技术基础知识单选题100道及答案解析
虚拟现实技术基础知识单选题100道及答案解析1. 虚拟现实技术的核心特征不包括()A. 沉浸感B. 交互性C. 想象性D. 独立性答案:D解析:虚拟现实技术的核心特征包括沉浸感、交互性和想象性,独立性不属于其核心特征。
2. 以下哪项不是虚拟现实系统的关键技术()A. 立体显示技术B. 环境建模技术C. 人工智能技术D. 触觉反馈技术答案:C解析:人工智能技术并非虚拟现实系统的关键技术,其他选项均是关键技术。
3. 在虚拟现实中,用于模拟用户与虚拟环境之间交互的技术是()A. 动作捕捉技术B. 语音识别技术C. 手势识别技术D. 以上都是答案:D解析:动作捕捉技术、语音识别技术和手势识别技术都可用于模拟用户与虚拟环境的交互。
4. 虚拟现实系统中,能让用户感受到物体的重量和质感的设备是()A. 力反馈设备B. 位置跟踪器C. 数据手套D. 头盔显示器答案:A解析:力反馈设备可以让用户感受到虚拟物体的重量和质感。
5. 以下哪种技术可以提高虚拟现实场景的真实感()A. 光线追踪技术B. 纹理映射技术C. 多边形建模技术D. 以上都是答案:D解析:光线追踪技术、纹理映射技术和多边形建模技术都有助于提高虚拟现实场景的真实感。
6. 虚拟现实的英文缩写是()A. VRB. ARC. MRD. CR答案:A解析:VR 是虚拟现实(Virtual Reality)的英文缩写。
7. 以下哪项不是虚拟现实的应用领域()A. 教育B. 医疗C. 金融D. 游戏答案:C解析:教育、医疗和游戏都是虚拟现实常见的应用领域,金融相对较少应用。
8. 能够实现虚拟现实中用户位置跟踪的设备是()A. 惯性传感器B. 全球定位系统C. 电磁跟踪器D. 以上都是答案:D解析:惯性传感器、全球定位系统和电磁跟踪器都可用于用户位置跟踪。
9. 虚拟现实中的建模方法不包括()A. 几何建模B. 物理建模C. 行为建模D. 情感建模答案:D解析:虚拟现实中的建模方法通常包括几何建模、物理建模和行为建模,情感建模较少涉及。
虚拟现实技术考试题和答案解析
虚拟现实技术试题(一)1、虚拟现实是一种高端人机接口,包括通过视觉、听觉、触觉、嗅觉和味觉等多种感觉通道的实时模拟和实时交互。
2、虚拟现实与通常CAD系统所产生的模型以及传统的三维动画是不一样的。
3、虚拟现实技术应该具备的三个特征:Immersion(沉浸) Interaction(交互) Imagination(想象)4、一个典型的虚拟现实系统的组成主要由头盔显示设备\多传感器组\力反馈装置5、从虚拟现实技术的相关概念可以看出,虚拟现实技术在人机交互方面有了很大的改进。
常被称之为“基于自然的人机界面”计算机综合技术,是一个发展前景非常广阔的新技术。
6、根据虚拟现实对“沉浸性”程度和交互程度的不同,可把虚拟现实系统划分为四种典型类型沉浸式\桌面式\增强式\分布式。
7、有关虚拟现实的输入设备主要分为两类。
三维位置跟踪器8、在虚拟现实系统的输入设部分,基于自然交互设备主要有力反馈设备\数据手套\三维鼠标.9、三维定位跟踪设备是虚拟现实系统中关键设备之一,一般要跟踪参与对象的宽度、高度、深度、俯仰角(pitch)、转动角(yaw)和偏转角(roll),我们称为6自由度(6DOF)。
10、空间位置跟踪技术有多种,常见的跟踪系统有机械跟踪器\电磁跟踪器\超声波跟踪器\惯性跟踪器\光学跟踪器。
11、所谓力反馈,是运用先进的技术手段将虚拟物体的空间无能运动转变成物理设备的机械运动,使用户能够体验到真实的力度感和方向感,从而提供一个崭新的人机交互界面。
该项技术最早应用于尖端医学和军事领域。
12、立体显示技术是虚拟现实系统的一种极为重要的支撑技术。
要实现立体的显示。
现已有多种方法与手段进行实现。
主要有互补色\偏振光\时分式\光栅式\真三维显示 .12、正是由于人类两眼的视差,使人的大脑能将两眼所得到的细微差别的图像进行融合,从而在大脑中产生有空间感的立体物体视觉。
13、HMD(Head_Mounted_Display),头盔式显示器,主要组成是显示元件\ 光学系统14、洞穴式立体显示装置(CAVE Computer Automatic Virtual Enviroment)系统是一套基于高端计算机的多面式的房间式立体投影解决方案,CAVE主要组成由高性能图形工作站\投影设备\跟踪系统\声音系统。
虚拟现实技术的复习资料

虚拟现实技术第一章1、虚拟现实的概念:用计算机技术来生成一个逼真的三维视觉、听觉、触觉或嗅觉等感觉世界;让用户可以从自己的视点出发,利用自然的技能和某些设备对这一生成的虚拟世界客体进行浏览和交互考察。
虚拟现实是计算机与用户之间的一种理想化的人-机界面形式。
通常用户戴一个头盔(用来显示立体图象的头式显示器),手持传感手套,仿佛置身于一个幻觉世界中,在虚拟环境中漫游,并允许操作其中的“物体”。
2、虚拟现实的特征与传统计算机相比,虚拟现实系统具有四个重要特征:临界性,交互性,想象性,多感知性3、虚拟现实系统的构成:a.虚拟世界(包含三维模型或环境定义的数据库) b.虚拟现实软件(提供实现观察和参与虚拟世界的能力) c.计算机 d.输入设别(观察和构造虚拟世界;如三维鼠标,数据手套,定义跟踪器等) e.输出设备(现实虚拟世界;如显示器,头盔等)4、虚拟现实系统的类型桌面虚拟现实系统,沉浸式虚拟现实系统,混合虚拟现实系统5、虚拟现实的硬件设备跟踪系统(把使用者身体位置的变动反馈给主机,以实时改变图像和声音)知觉系统(人及交互的各种界面,包括视觉装置:头盔显示器等;触觉装置:数据手套跟踪球等)音频系统:立体声耳机等图像生成和现实系统:产生视觉图象和立体显示6、虚拟现实有哪些软件VR系统开发工具:能够接受各种高性能传感器的信息,如头盔的跟踪信息;能生成立体显示图行;能把各种数据库,各种CAD软件进行调用和互联3DSMax:三维制作软件Maya:三维动画以及虚拟现实制作软件,实时三维模型创建软件Multigen Creator7、眼睛的作用、视觉暂留和临界融合频率的概念眼睛的作用:调节和聚焦,明暗适应,视觉暂留,立体视觉,视场视觉暂留:视觉暂留是视网膜的电化学县乡造成视觉的反应时间。
当观看很短的光脉冲时,视杆细胞得到越0.25s的峰,视椎细胞快4倍(0.04s)。
这种现象造成视觉暂留。
临界融合频率:临界融合频率(CFF)效果会产生把离散图像序列组合成连续视觉的能力,CFF最低20Hz,冰取决于图像尺寸和亮度。
虚拟现实技术复习资料

选择题:1、虚拟现实的本质特征:①沉浸感②交互性③想象性2、沉浸感是最弱的,是虚拟现实最重要的技术特征。
3、视觉感知设备:①头盔显示器;②立体眼镜显示系统;③洞穴式立体显示系统;④响应工作台立体显示系统;⑤墙式立体显示系统;⑥裸体立体显示系统。
4、电磁式位置跟踪设备可分为交流电发射器型与直流电发射器型。
5、触觉反馈设备:①充气式触觉反馈装置;②振动式触觉反馈装置;③视觉式触觉反馈装置;④电刺激式触觉反馈装置;⑤神经肌肉刺激式触觉反馈装置。
6、虚拟对象建模:几何建模、图像建模、图像与几何相结合建模、视觉外观设计。
7、分形技术属于物理建模。
8、虚拟环境建模:物理建模、行为建模、运动建模、声音建模。
9、几何建模的方法:①多边形;②非统一有理B样条;③构造立体几何。
10、碰撞检测的方法:①直接检测法;②包围盒检测法;③分割检测法;④Lin-Canny 检测法。
名词解释:虚拟现实技术:虚拟环境是人工构造的,存在于计算机内部的环境。
用户应该能够以自然的方式与这个环境交互(包括感知环境并干预环境),从而产生置身于相应的真实环境中的虚幻感,沉浸感,身临其境的感觉的一种技术。
LOD技术:即Level Of Details,细节层次。
我们用LOD来描述一个物体在不同的距离上进行渲染时可选的细节程度。
在不影响画面视觉效果的条件下,通过逐次简化景物的表面细节来减少场景的几何复杂性,从而提高绘制算法效率的技术。
消隐技术:就是要解决形体的二义性问题,通过消隐线或消隐面方法,提高图形的真实感的技术。
要消除二义性,必须在绘制时消除被遮挡的不可见的线或面,称作消除隐藏线或隐藏面,或简称为消隐。
消隐技术就是给定一组三维对象及投影方式(视见约束),判定线、面或体的可见性的过程。
景深技术:指被摄景物中能产生较为清晰影像的最近点至最远点的距离。
简答题:1.关于行为建模、行人的运动建模有哪些?行为建模:基于Agent的行为建模,基于状态图的行为建模,基于物理的行为建模,基于特征的行为建模和基于事件驱动的行为建模。
2023虚拟现实与AR技术复习 题集附答案
2023虚拟现实与AR技术复习题集附答案2023虚拟现实与AR技术复习题集附答案Introduction:虚拟现实(Virtual Reality,简称VR)和增强现实(Augmented Reality,简称AR)技术是当今科技领域的两大热门话题。
本文将通过对2023年虚拟现实与AR技术的综合复习题集进行答案解析,帮助读者加深对这两种技术的理解和应用。
[题1] 什么是虚拟现实技术?请简要描述其原理和应用领域。
答:虚拟现实技术是通过计算机生成的三维图像和声音等多种感官输入,以及对人的头部和手部运动的追踪,将用户沉浸于虚拟世界中,使其感觉到身临其境的一种技术。
其原理主要包括显示技术、感知技术和交互技术。
显示技术通过佩戴特殊头盔或眼镜,将计算机生成的三维图像投影到用户眼中,创造出逼真的虚拟场景。
感知技术通过传感器对用户的头部和手部运动进行实时追踪,使用户能够在虚拟环境中感受到自己的存在和操作。
交互技术则让用户能够更自由地与虚拟环境进行沟通和互动。
虚拟现实技术的应用领域广泛,包括游戏娱乐、教育培训、医疗健康、工程设计等。
在游戏娱乐领域,虚拟现实技术可以带来更逼真的游戏体验,让玩家沉浸于虚拟的游戏世界中。
在教育培训领域,虚拟现实技术可以模拟各种场景和情境,帮助学生更好地理解和记忆知识。
在医疗健康领域,虚拟现实技术可以用于康复治疗、手术模拟等方面,提升医疗效果和安全性。
在工程设计领域,虚拟现实技术可以帮助工程师更直观地进行设计和调试,提高工作效率。
[题2] AR技术与虚拟现实技术有何不同?请列举一些AR技术的应用场景。
答:AR技术与虚拟现实技术相比,更强调将虚拟信息与现实环境相结合,为用户提供增强现实的体验。
AR技术通过对现实世界的感知和分析,然后将相关的虚拟信息叠加到用户的视觉场景中,使用户能够看到增强现实的效果。
AR技术的应用场景非常丰富。
在游戏娱乐领域,AR技术可以将虚拟角色和游戏道具叠加到现实环境中,让用户在现实世界中进行游戏。
虚拟与现实复习重点
题型:填空、单选、简答第一章虚拟现实技术概述1.虚拟现实的概念:集成了计算机图形学、计算机仿真技术、人工智能、传感技术、显示技术和网络并行处理技术等领域的最新发展成果,把客观上存在的或并不存在的东西,运用计算机技术,在用户眼前生成一个虚拟的环境。
2.虚拟现实的基本特性:沉浸、交互、构想3.虚拟现实发展:20世纪60年代(首次出现概念)→ 80年代逐渐兴起→ 90年代产品问世4.三个发展阶段:70年代前(虚拟现实技术思想的产生)→ 80年代初到中期(初步发展)→80年代末至今(日趋完善)5.虚拟现实系统的构成,主要包括六个模块:检测模块、反馈、传感器、控制、3D模型库、建模模块6.虚拟现实应用:军事、教育、体育、游戏、建筑7.虚拟现实系统基本功能:创建虚拟世界,人与虚拟系统的交互8.虚拟显示研究的内容:虚拟现实技术(人机交互、虚拟系统创建),虚拟现实应用(真实世界仿真、抽象概念建模与可视化)第二章观察方法与观察设备1.虚拟显示系统两种实现:沉浸式实现(交互方式:基于自然方式的人机交互),非沉浸式交互(基于常规交互设备的人机交互)2.VR系统组成:虚拟系统生成设备、感知设备、跟踪设备、基于自然方式的人机交互设备(1)虚拟系统生成设备:一台或多台高性能计算机。
分类:沉浸式(高性能图形工作站、分布式异构计算机的VR系统),非沉浸式(高性能个人计算机)听觉通道信号的生成与显示(声音生成与播放)视觉通道信号的生成与显示(建模与绘制)触觉与力觉通道信号的生成与显示(力的建模与反馈)支持实时人机交互的功能(三维空间定位、碰撞检测、语音识别、人机实时对话。
)(2)感知设备功能:将VR系统各类感知模型转变为人能接受的多通道刺激信号的设备。
感知包括:视、听、触、嗅、味觉等多种通道。
视觉感知设备:立体宽视场图形显示器,包括沉浸式(头盔显示器:封闭式、透视式)和非沉浸式(立体显示器)(3)跟踪设备功能:跟踪并监测位置和方位的设备。
虚拟现实技术考试题和答案解析
虚拟现实技术试题(一)1、虚拟现实是一种高端人机接口,包括通过视觉、听觉、触觉、嗅觉和味觉等多种感觉通道的实时模拟和实时交互。
2、虚拟现实与通常CAD系统所产生的模型以及传统的三维动画是不一样的。
3、虚拟现实技术应该具备的三个特征:Immersion( 沉浸) Interaction( 交互) Imagination( 想象)4、一个典型的虚拟现实系统的组成主要由头盔显示设备多传感器组力反馈装置5、从虚拟现实技术的相关概念可以看出,虚拟现实技术在人机交互方面有了很大的改进。
常被称之为“基于自然的人机界面”计算机综合技术,是一个发展前景非常广阔的新技术。
6、根据虚拟现实对“沉浸性”程度和交互程度的不同,可把虚拟现实系统划分为四种典型类型沉浸式桌面式增强式分布式。
7、有关虚拟现实的输入设备主要分为两类。
三维位置跟踪器8、在虚拟现实系统的输入设部分,基于自然交互设备主要有力反馈设备数据手套三维鼠标.9、三维定位跟踪设备是虚拟现实系统中关键设备之一,一般要跟踪参与对象的宽度、高度、深度、俯仰角(pitch) 、转动角(yaw) 和偏转角(roll ), 我们称为 6 自由度(6DOF)。
10、空间位置跟踪技术有多种,常见的跟踪系统有机械跟踪器电磁跟踪器超声波跟踪器惯性跟踪器光学跟踪器。
11、所谓力反馈,是运用先进的技术手段将虚拟物体的空间无能运动转变成物理设备的机械运动,使用户能够体验到真实的力度感和方向感,从而提供一个崭新的人机交互界面。
该项技术最早应用于尖端医学和军事领域。
12、立体显示技术是虚拟现实系统的一种极为重要的支撑技术。
要实现立体的显示。
现已有多种方法与手段进行实现。
主要有互补色偏振光时分式光栅式真三维显示.12、正是由于人类两眼的视差,使人的大脑能将两眼所得到的细微差别的图像进行融合,从而在大脑中产生有空间感的立体物体视觉。
13、HMD(Head_Mounted_Display ), 头盔式显示器,主要组成是显示元件\ 光学系统14、洞穴式立体显示装置(CAVE Computer Automatic Virtual Enviroment )系统是一套基于高端计算机的多面式的房间式立体投影解决方案,CAVE主要组成由高性能图形工作站投影设备跟踪系统声音系统。
虚拟现实技术资料整理
虚拟现实技术资料整理虚拟现实(Virtual Reality,简称VR)技术是一种能够模拟和创造虚拟环境的计算机技术,通过使用特殊的设备,如头戴式显示器和手柄控制器,使用户能够身临其境地感受和交互虚拟环境。
近年来,虚拟现实技术在游戏、教育、医疗、娱乐等领域得到了广泛的应用和发展。
一、虚拟现实技术的基本原理虚拟现实技术的实现主要依靠以下几个关键技术:图像生成与渲染、空间定位与追踪、交互设备与手柄控制、声音与音频处理、实时计算与传输等。
1. 图像生成与渲染虚拟现实技术通过计算机生成逼真的三维图像,以模拟真实世界的场景。
图像生成主要依赖于计算机图形学和计算机视觉技术,包括建模、纹理映射、光照计算等。
而图像渲染则是将生成的图像进行处理,使其能够在虚拟环境中呈现出逼真的效果。
2. 空间定位与追踪为了让用户能够在虚拟环境中自由移动和交互,虚拟现实技术需要实时追踪用户的头部和手部位置。
目前常用的定位和追踪技术包括惯性导航、光学追踪、声音定位等。
3. 交互设备与手柄控制为了增强用户对虚拟环境的交互体验,虚拟现实技术使用各种交互设备和手柄控制器。
例如,头戴式显示器可以实时跟踪用户头部的位置和姿态,手柄控制器可以模拟用户的手部动作。
4. 声音与音频处理虚拟现实技术还需要提供逼真的音频效果,以增强用户的沉浸感。
通过声音定位和音频处理技术,可以使用户在虚拟环境中听到来自不同方向的声音,并产生立体声效果。
5. 实时计算与传输虚拟现实技术需要实时计算和传输大量的图像和数据,以确保用户在虚拟环境中的体验流畅和逼真。
高性能的计算机和稳定的网络连接是保证实时计算和传输的关键。
二、虚拟现实技术的应用领域虚拟现实技术在各个领域都有广泛的应用,下面将介绍几个典型的应用领域。
1. 游戏与娱乐虚拟现实技术在游戏和娱乐领域有着广泛的应用。
通过虚拟现实设备,玩家可以身临其境地参与游戏,感受到更加真实的游戏体验。
例如,玩家可以在虚拟现实环境中与游戏角色互动,体验到真实的动作和情感。
虚拟现实及其应用总复习

• 2-4 VRML浏览器 • Cortona3d • CosmoPlayer • Bitmanagment
➢ (4)VRML文件头的第四部分是“utf8”字符串,该字符串提示浏览器该VRML 文件是一个使用国际标准UTF-8字符集的文件.
➢ UTF-8的英文全称是UCS Transform Format,而UCS是Universal Character Set的缩写.
➢ VRML节点。每个VRML文件都是一个基于时间的三维空间表示,它包含了可通 过多种机制动态变化的由视、听和对象组成的虚拟环境。
• 想象力(Imagination)指用户在虚拟世界中根据所获取的多种信息和自身在系统 中的行为,通过逻辑判断、推理和联想等思维过程,随着系统的运行状态变化而 对其未来进展进行想象的能力,随意构想客观不存在或不可能发生的环境。
• 对适当的应用对象加上虚拟现实的创意和想象力,可以大幅度提高生产效率、减 轻劳动强度、提高产品开发质量。
• 1965年,Ivan Sutherland发表论文“Ultimate Display”(终极的显示)1965年, Ivan Sutherland在篇名为《The Ultimate Display》(终极的显示)的论文中首 次提出了包括具有交互图形显示、力反馈设备以及声音提示的虚拟现实系统 的基本思想,从此,人们正式开始了对虚拟现实系统的研究探索历程.
他感觉封闭起来,而使用户真正成为VR系统内部的一个参与者,产生一种身临其境、 全心投入并沉浸其中的体验。 系统中有个用户的替身。用户在系统外面,用户与替 身在感觉上有一个距离,这个距离越小。沉浸感超强,当用户与替身完全重合是。 用户就完全进入到系统中了
虚拟现实期末复习
虚拟现实目录第一章虚拟现实概念 (2)1.1虚拟环境 (2)1.2特点 (2)1.3三个I (2)1.4虚拟现实系统的主要应用领域 (2)1.5接口 (2)1.6视觉 (2)1.7VR建模 (2)1.8仿真 (2)1.9虚拟现实开发系统的方块图 (2)1.10视觉 (2)1.11听觉 (2)1.12身体感觉 (2)1.13飞行仿真 (2)第二章虚拟现实的接口设备 (2)2.1位姿传感器的要求 (2)2.2位姿跟踪和映射的基本传感系统 (3)2.3视觉接口 (3)2.4听觉接口 (3)2.5接触接口 (3)第三章 (3)第四章 VRML (3)4.1VRML (3)4.2VRML文件 (4)4.3原型 (4)4.4物体的造型 (4)4.5脚本 (4)4.6路由 (4)4.7事件体系 (4)4.8VRML文件语法 (4)4.9VRML文件 (4)4.10表示多域值的方法 (4)4.11定义节点 (4)4.12节点名的使用有如下规定 (4)4.13事件的命名规则 (4)4.14路由在绑定节点时的注意事项 (4)4.15各种节点 (4)4.16Shape节点 (5)4.17Material节点属性语法 (5)4.18shape实例 (5)4.19ElevationGrid海拔栅格节点 (6)4.20挤出造型节点 (6)4.21群节点 (7)4.22Transform (7)4.221对立方体进行旋转 (7)4.23飞碟造型 (7)4.24哑铃的造型 (8)4.25Group:路灯造型 (8)4.26Inline联节点 (9)4.27在公路模型中调用路灯 (9)4.28Switch开关节点 (9)4.29Billboard广告、警示牌、海报节点 (9)4.30Anchor锚节点即超级群节点 (9)4.31LOD细节层次节点 (9)第五章VRML场景效果节点编程设计 (9)5.1Fog雾化节点 (9)5.2纹理效果节点 (9)5.3ImageTexture图像纹理节点 (10)5.4PixelTexture节点 (10)5.5MovieTexture 影像纹理节点 (10)5.6TextureCoordinate纹理坐标节点 (10)5.7TextureTransform纹理变换节点 (10)5.8视点效果节点 (11)5.9导航 (11)5.10Viewpoint节点 (11)5.11NavigationInfo视点导航信息节点 (11)5.12光源 (11)5.13PointLight点光源节点 (11)5.14DirectionalLight定向光源节点 (11)5.15SpotLight聚光灯光源节点 (11)5.16音响效果节点 (12)5.17Sound (12)5.18MovieTexture节点 (12)第六章动态感知虚拟现实节点 (13)6.1TimeSenor时间传感器节点 (13)6.2插补器节点 (13)6.3PositionInterpolator位置插补器节点 (13)6.4飞碟由小变大 (13)6.50rientationInterpolator朝向插补器节点 (14)6.6ScalarInterpolator标量插补器节点 (14)6.7ColorInterpolator颜色插补器节点 (14)6.8CoordinateInterpolator坐标插补器节点 (14)6.9NormalInterpolator 法线插补器节点 (15)6.10TouchSensor触摸传感器节点 (16)6.11PlaneSensor平面检测器节点 (16)6.12CylinderSensor圆柱检测器节点 (16)6.13SphereSensor球面检测器节点 (17)6.14VisibilitySensor能见度传感器节点 (17)6.15ProximitySensor亲近度传感器节点 (17)6.16Collision碰撞传感器节点 (18)第七章 VRML通用接口节点 (18)7.1Script (18)7.2VrmlScript (19)7.3新节点 (20)7.4外部定义的新节点 (21)7.5Anchor实现直接上网 (21)7.6超文本标记语言 (21)虚拟现实复习资料第一章虚拟现实概念1.1虚拟环境:“进入”这个虚拟的环境中,是指用户以自然的方式与这个环境交互(是指用户通过视觉,听觉,触觉等感觉虚拟环境,通过在真实环境中的行为,去干预虚拟环境。
虚拟现实复习资料VR.docx
复习资料一、填空题知识点1、1993年美国科学家Burdea. G和Philipe Coiffed在世界电子年会上发表了一篇题为a Virtual Reality System and Applicatin”的论文,提岀了虚拟现实技术应该具备的三个特征是—沉侵性—、________ 交互性____ 、想像性。
2、传统的计算机通常使用显示器、键盘、鼠标等接口设备进行交互,而在虚拟现实系统中, 强调人机交互和自然交互,通过如数据手套、立体显示设备、跟踪设备等特殊的输入输出设备,可以让用八使用人的自然技能直接对虚拟世界川的物体进行考察和操作,同时提供视、听、触等多种直观立体的实时感知。
3、一个典型的沉浸式虚拟现实系统的主要由计算机、_头盔式显示器_、—数据手套_、力反馈装置、话筒、耳机等设备组成。
该系统首先由计算机生成一个虚拟世界,输出立体显示环境,用户可以采用头的转动、手的动作、语音等与虚拟1比界进行交互,计算机能能根据用户输入的各种信息实时进行计算,对交互行为进行各种实时反馈和更新输出。
4、根据虚拟现实刈* “沉浸性”程度和交互程度的不同,可把虚拟现实系统划分为四种典型类型,即桌面式VR系统、—增强式VR ______ 、_沉侵式VR ________ 、分布式VR系统。
5、三维定位跟踪设备是虚拟现实系统中关键设备2—,一般要跟踪参与对象的宽度(x)、髙度(y)、深度(z)、俯仰角(pitch)、转动角(yaw)和偏传角(roll),因此共有6个独立变量,我们称为—6 口由度—。
用于表征对象在空间的_________________ 位置和朝向_______ o6、现阶段的立体图像显示技术主要有两种,一种是—同时显示技术就是同时显示两幅不同波长的图像,通过滤光使用户左右眼只能看到对应的图像;第二种是_分时显示技术就是在显示屏上以一定频率交替显示同一场景的立体图像对,用户利用相同频率切换的立体眼镜观察图像。
济南大学虚拟现实知识点整理

1. 虚拟现实定义2. 人机交互的定义人机交互是研究与计算机使用有关的人的行为,寻找建造人机界面的方法和技术,使之适合人的需要的学科。
人机交互是研究人与计算机相互影响的技术,是人与计算机之间传递、交换信息的媒介和对话接口,是交叉性、综合性的学科3. 五家虚拟现实公司暴风魔镜中视典乐相科技上海创图北京蚁视4. VR 有哪些核心技术交互复杂场景的建模、绘制5. VR 的输入设备扫描仪数字手套头盔摄像机物理感应器Kinect 手柄投影仪鼠标跟踪球跟踪器6. 虚拟现实系统包括哪些部分硬件:输入输出图形工作站:计算设备公司合作硬件接口软件:VR 建模平台应用软件7. 光强处理方法:(1) 各顶点法向(2) 顶点平均光强(3) 插值计算各离散边上光强I = tI1 + (1-t) I2 t 属于(0,1)(4) 计算内域各点8. VR 应用的实例9. 虚拟现实三性虚拟现实技术有别于其他计算机应用技术的三个鲜明特征:构想性、沉浸性和交互性10. 三维交互设备三维输入设备:跟踪器数据手套三维鼠标触觉和力反馈器立体眼镜、WorkBench、头盔式显示器、洞穴式立体显示器(CAVE)、墙式大屏幕立体显示器、数据服装、位置跟踪器、眼动跟踪器、触觉和力反馈装置、三维扫描设备、三维鼠标、三维跟踪球、三维游戏杆、数据手套11. 人机交互的发展历史阶段语言命令交互阶段图形用户界面交互阶段和谐自然的人机交互阶段(多通道人机交互)12. 人机交互发展趋势集成化网络化智能化标准化目标:和谐自然的人机交互环境13. 交互设备:Leap MotionKinect谷歌眼镜14. 虚拟现实系统数字考古博物馆15. 体感交互实时性鲁棒性交互效率用户负荷16. 常用建模工具3DSMAX MAYA17. 开发工具软件虚拟世界工具箱WTK18. 增强现实将计算机生成的虚拟物体、场景或系统提示信息叠加到真实场景中,从而实现对现实的增强,其目的在于通过把计算机生成的虚拟对象与真实环境融为一体的方式来增强用户对真实环境的理解。
虚拟现实技术复习题

虚拟现实技术复习题一、虚拟现实技术的概念虚拟现实技术(Virtual Reality,简称 VR)是一种利用计算机技术生成的模拟环境,让用户能够沉浸其中,并与虚拟环境进行交互。
它通过创建逼真的视觉、听觉和触觉等多感官体验,使用户感觉仿佛置身于一个真实的世界中。
二、虚拟现实技术的特点1、沉浸感沉浸感是虚拟现实技术最显著的特点之一。
通过头戴式显示器、立体声音响等设备,用户能够完全沉浸在虚拟环境中,暂时忘记现实世界的存在。
2、交互性用户可以与虚拟环境中的对象进行交互,例如拿起、移动、操作物品等。
这种交互性增强了用户的参与感和体验感。
3、想象力虚拟现实技术为用户提供了一个无限可能的想象空间,能够创造出各种奇幻、科幻或现实中难以实现的场景。
三、虚拟现实技术的系统组成1、硬件设备(1)头戴式显示器(HeadMounted Display,HMD)这是用户获取视觉体验的关键设备,能够将虚拟图像直接呈现在用户眼前。
(2)手柄或控制器用于用户与虚拟环境进行交互操作,如抓取、点击等。
(3)追踪系统用于实时跟踪用户的头部、手部等位置和动作,以实现准确的交互。
(4)计算机主机负责处理和渲染虚拟环境的图像、声音等数据。
2、软件系统(1)建模软件用于创建虚拟环境中的物体、场景等模型。
(2)引擎软件负责整合和管理各种模型、材质、动画等资源,实现虚拟环境的渲染和交互逻辑。
四、虚拟现实技术的关键技术1、立体显示技术通过为用户的左右眼分别提供不同的图像,从而产生立体感。
2、动作捕捉技术准确捕捉用户的身体动作和手势,实现自然的交互。
3、实时渲染技术能够在短时间内生成高质量的虚拟图像,以保证流畅的视觉体验。
五、虚拟现实技术的应用领域1、游戏娱乐为玩家带来更加身临其境的游戏体验,如 VR 游戏、主题公园的VR 游乐设施等。
2、教育培训可以创建虚拟的实验室、历史场景等,让学生在虚拟环境中进行学习和实践。
3、医疗健康用于医疗培训、心理治疗、康复训练等方面。
虚拟现实技术考精彩试题及问题详解
虚拟现实技术试题(一)1、虚拟现实是一种高端人机接口,包括通过视觉、听觉、触觉、嗅觉和味觉等多种感觉通道的实时模拟和实时交互。
2、虚拟现实与通常CAD系统所产生的模型以及传统的三维动画是不一样的。
3、虚拟现实技术应该具备的三个特征:Immersion(沉浸) Interaction(交互) Imagination(想象)4、一个典型的虚拟现实系统的组成主要由头盔显示设备\多传感器组\力反馈装置5、从虚拟现实技术的相关概念可以看出,虚拟现实技术在人机交互方面有了很大的改进。
常被称之为“基于自然的人机界面”计算机综合技术,是一个发展前景非常广阔的新技术。
6、根据虚拟现实对“沉浸性”程度和交互程度的不同,可把虚拟现实系统划分为四种典型类型沉浸式\桌面式\增强式\分布式。
7、有关虚拟现实的输入设备主要分为两类。
三维位置跟踪器8、在虚拟现实系统的输入设部分,基于自然交互设备主要有力反馈设备\数据手套\三维鼠标.9、三维定位跟踪设备是虚拟现实系统中关键设备之一,一般要跟踪参与对象的宽度、高度、深度、俯仰角(pitch)、转动角(yaw)和偏转角(roll),我们称为6自由度(6DOF)。
10、空间位置跟踪技术有多种,常见的跟踪系统有机械跟踪器\电磁跟踪器\超声波跟踪器\惯性跟踪器\光学跟踪器。
11、所谓力反馈,是运用先进的技术手段将虚拟物体的空间无能运动转变成物理设备的机械运动,使用户能够体验到真实的力度感和方向感,从而提供一个崭新的人机交互界面。
该项技术最早应用于尖端医学和军事领域。
12、立体显示技术是虚拟现实系统的一种极为重要的支撑技术。
要实现立体的显示。
现已有多种方法与手段进行实现。
主要有互补色\偏振光\时分式\光栅式\真三维显示 .12、正是由于人类两眼的视差,使人的大脑能将两眼所得到的细微差别的图像进行融合,从而在大脑中产生有空间感的立体物体视觉。
13、HMD(Head_Mounted_Display),头盔式显示器,主要组成是显示元件\ 光学系统14、洞穴式立体显示装置(CAVE Computer Automatic Virtual Enviroment)系统是一套基于高端计算机的多面式的房间式立体投影解决方案,CAVE主要组成由高性能图形工作站\投影设备\跟踪系统\声音系统。
虚拟现实复习题
虚拟现实复习题虚拟现实(Virtual Reality,简称 VR)是一种利用计算机技术创建的模拟环境,能够让用户沉浸其中并与之交互。
它在游戏、教育、医疗、建筑等众多领域都有着广泛的应用和巨大的发展潜力。
以下是关于虚拟现实的一些重要复习题。
一、虚拟现实的技术原理1、什么是虚拟现实的沉浸感?沉浸感是虚拟现实的核心特性之一,它指的是用户在虚拟环境中感觉到仿佛身临其境,完全被虚拟世界所包围,暂时忘记了现实世界的存在。
实现沉浸感主要依赖于高质量的图形显示、逼真的音效、精确的追踪技术以及低延迟的交互反馈。
2、虚拟现实中的追踪技术有哪些?常见的追踪技术包括头部追踪、手部追踪和身体追踪。
头部追踪可以让虚拟环境随着用户头部的转动而相应改变视角,提供更真实的视觉体验。
手部追踪能够捕捉用户手部的动作,实现与虚拟物体的自然交互。
身体追踪则可以获取用户身体的姿态和动作信息,进一步增强沉浸感。
3、虚拟现实中的显示技术有哪些?目前主要的显示技术包括头戴式显示器(HeadMounted Display,HMD)、洞穴式自动虚拟环境(Cave Automatic Virtual Environment,CAVE)和投影式显示。
头戴式显示器是最常见的形式,如HTC Vive、Oculus Rift 等。
CAVE 系统通过在多个屏幕上投影来创建一个沉浸式的空间。
投影式显示则常用于大型的虚拟现实体验场所。
二、虚拟现实的应用领域1、虚拟现实在游戏领域的应用虚拟现实为游戏带来了全新的体验,玩家可以身临其境地参与游戏,不再仅仅是通过屏幕观看。
例如,恐怖游戏可以通过营造逼真的恐怖氛围,让玩家感受到心跳加速的刺激;动作游戏可以让玩家亲自挥拳、踢腿,与虚拟敌人进行战斗。
2、虚拟现实在教育领域的应用在教育中,虚拟现实可以创建生动的学习场景,例如历史事件的重现、地理环境的展示、科学实验的模拟等。
学生可以通过亲身体验来更好地理解和记忆知识,提高学习的积极性和效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
虚拟现实技术复习习题1.虚拟现实的概念:用计算机技术来生成一个逼真的三维视觉、听觉、触觉或嗅觉等感觉世界;让用户可以从自己的视点出发,利用自然的技能和某些设备对这一生成的虚拟世界客体进行浏览和交互考察。
虚拟现实是计算机与用户之间的一种理想化的人-机界面形式。
通常用户戴一个头盔(用来显示立体图象的头式显示器),手持传感手套,仿佛置身于一个幻觉世界中,在虚拟环境中漫游,并允许操作其中的“物体”。
2.虚拟现实的特征与传统计算机相比,虚拟现实系统具有四个重要特征:临界性,交互性,想象性,多感知性3.虚拟现实系统的构成:a.虚拟世界(包含三维模型或环境定义的数据库)b.虚拟现实软件(提供实现观察和参与虚拟世界的能力)c.计算机d.输入设别(观察和构造虚拟世界;如三维鼠标,数据手套,定义跟踪器等)e.输出设备(现实虚拟世界;如显示器,头盔等)4.虚拟现实系统的类型桌面虚拟现实系统,沉浸式虚拟现实系统,混合虚拟现实系统5.虚拟现实的硬件设备跟踪系统(把使用者身体位置的变动反馈给主机,以实时改变图像和声音)知觉系统(人及交互的各种界面,包括视觉装置:头盔显示器等;触觉装置:数据手套跟踪球等)音频系统:立体声耳机等图像生成和现实系统:产生视觉图象和立体显示6.虚拟现实有哪些软件VR系统开发工具:能够接受各种高性能传感器的信息,如头盔的跟踪信息;能生成立体显示图行;能把各种数据库,各种CAD软件进行调用和互联3DSMax:三维制作软件Maya:三维动画以及虚拟现实制作软件Multigen Creator,实时三维模型创建软件7.眼睛的作用、视觉暂留和临界融合频率的概念眼睛的作用:调节和聚焦,明暗适应,视觉暂留,立体视觉,视场视觉暂留:视觉暂留是视网膜的电化学县乡造成视觉的反应时间。
当观看很短的光脉冲时,视杆细胞得到越0.25s的峰,视椎细胞快4倍(0.04s)。
这种现象造成视觉临界融合频率:临界融合频率(CFF)效果会产生把离散图像序列组合成连续视觉的能力,CFF最低20Hz,冰取决于图像尺寸和亮度。
英国电视场频50Hz,美国电视场频60Hz。
电影帧频24Hz。
眼对闪烁的敏感正比于亮度,所以若白天的图像更新率为60Hz,则夜间只要30Hz。
8.什么叫LOD?(基本思想、方法、应用)LOD(Level Of Detail)模型方法LOD基本思想:①对场景中的不同物体或物体的不同部分,采用不同的细节描述方法;②在会只是,如果同一个物体离视点比较远,或物体比较小,则用较粗的LOD 模型;③反之,如果一个物体离视点比较近,或物体比较大,则必须用较精细的LOD 模型绘制;④运动的物体,对运动速度快或处于运动中的物体,采用较粗的LOD,对静止的物体,采用较细的LOD。
LOD作用:①对物体定义具有多种细节水平的几何表示;②用户根据实际需要选择相应精细程度的模型,使实时绘制场景成为可能;③有效地控制场景复杂度;④加速图形绘制速度。
LOD方法的应用:①虚拟现实,②交互式可视化,③飞行模拟、3D动画、交互式仿真等。
9.碰撞检测技术在虚拟环境中,由于用户的交互和物体的运动,物体间经常可能发生碰撞,此时为了保持环境的真实性,需要即时检测这些碰撞,并计算相应的碰撞反应,更新绘制结果,否则,物体间会出现穿透现象,破获虚拟环境的真实感和用户的沉浸感;碰撞检测:检测到有碰撞,计算出碰撞发生的位置,检测物体间的距离,检测下一次碰撞将在何时发生。
10.虚拟现实的应用领域和发展方向虚拟现实的应用领域主要包括(1)地学应用;包括数字城市建设、城市规划、虚拟旅游、虚拟考古等(2)科学研究和科学计算可视化(3)教育培训(4)军事模拟训练(5)工程应用(6)医学领域应用(7)娱乐领域应用目前虚拟现实技术处于多元化的发展趋势,一方面虚拟现实技术借助于计算机技术、网络技术、摄影技术、等的发展而高速发展,出现了分布式虚拟现实系统、CAD Wall、VR Center、CA VE、IDesk等新技术。
另一方面,虚拟现实技术与专业技术相融合又产生了数字地球研究、虚拟规划设计、虚拟现实机械装配、虚拟考古、虚拟手术、虚拟驾驶、虚拟管线设计、虚拟军事对抗等领域的应用,使得虚拟现实技术成为一种崭新的技术手段而得到广泛的应用。
11.地形三维显示中的数据类型用于地形三维显示的数据按其数据结构类型可分为:矢量型和栅格型两大类矢量型数据主要包括:等高线矢量数据(平面数据带高程属性);地形特征点、线矢量数据;各类地形要素的矢量数据(如居民地、河流、道路等)栅格型数据主要包括:数字高程模型DEM(Digital Elevation Model);纹理图像数据。
(1)数字高程模型DEM一般有网格型(Grid)和不规则三角形网格(Tin)两种类型。
一般Grid型DEM更常用一些,具有结构简单,容易获取等特点;(2)纹理图像有多种类型,常见的用于地形三维可视化的纹理图像有:经扫描后获得的地形图图像数据(也叫像素地形图)、各种数字遥感图像或其他植被纹理图像。
(3)矢量数据一般由点数、属性以及坐标串所组成,一般可分为点、线、面三大类。
而其中等高线以及地形特征点、线矢量数据是用于生成DEM数据的。
DEM是地形三维显示中最重要的数据,它的精度、质量直接影响到以后生成地形三维图的质量.12.DEM的概念、三种主要获取DEM的方法及优缺点比较、另外三种获取DEM的方法的原理及优缺点EM的概念、三种主要获取DEM的方法及优缺点比较、另外三种获取DEM的方法的原理及优缺点DEM(Digital Elevation Models数字高程模型):是国家空间数据的重要组成部分,表示地形区域内三维向量的有限序列,即地面高程集合。
DEM数据的获取主要有三种方法:(1)野外实地直接测量得到;该方法适用于大比例尺、精度要求高、采集面积范围较小的DEM数据获取。
该方法的优点是可以获取高精度的DEM数据。
其缺点是劳动强度较大、效率较低,仅适用于小范围面积内作业。
(2)利用摄影测量方法获取;适用于大范围区域测量,成像效率高。
该方法的缺点是数据源(立体像对)获取的成本较高、采集作业要求具备专业的仪器设备(主要是解析测图仪或数字摄影测量系统)和训练有素的摄影测量专业技术人员。
(3)从地形图中采集。
所需的原始数据源(地图)容易获取,对采集作业所需的仪器设备和作业人员的要求不太高,采集速度也比较快,易于进行大批量作业。
精度较低。
其它获取DEM方法:用航天遥感立体像对获取DEM.INSAR(干涉合成孔径雷达)获取DEM.激光扫描测高仪等13.坐标转换流程观察变化模型坐标模型变换世界坐标观察坐标投影变换工作站变换规范化变化设备坐标规范化坐标投影坐标系14.地形三维显示的基本过程:(1)数据准备:获取地形三维可视化所需的各类地形数据(2)DEM递归细分:将DEM细分成子网格,再进一步细分为三角形面素,以便下一步绘制处理。
(3)透视投影变换:建立地面点(DEM结点)与三维图像点间的透视关系,由视面、视角、三维图形大小等参数确定。
(4)光照模型:建立一种能逼真反映地形表面明暗、颜色充化的数学模型,逐点计算每像素的颜色和灰度。
(5)消隐和裁剪:消去(或不显示)三维图形的可视部分,裁剪掉三维图形尺寸范围之外的部分。
(6)图形绘制和存贮:依各种相应算法(如模拟灰度、分形几何、纹理映射等)绘制并显示各种类型的三维地形图,并以标准图像文件格式(如PCX,TIFF,BMP等)存贮。
(7)三维图形的后处理:在三维透视图上添加各种地物符号、注记等,进行颜色、亮度、对比度等处理。
(8)基于三维地形图的分析:在三维地形图上依据有关参数、数据库或数据文件以及有关算法,进行空间信息查询或地形分析。
15.投影转换的数学模型公式DEM中任一点M在地面坐标系OT-XTYTZT,a中的坐标为(Xm,Ym,Zm),它在投影平面P上的像点为m,则m点在投影坐标系O-xy中的坐标(xm,ym)由下式计算求出:(XT,YT,ZT)是视点S在地面坐标系O-XYZ中的坐标;α是投影平面与地面坐标系的平面间的夹角;θ是地面坐标系的XT轴与投影坐标系的X轴之间的夹角。
16.几种常用的消隐算法消隐处理曾经是计算机三维图形绘制中的重点研究难题,现在已有多种成熟而有效的算法。
具有代表性的三种算法是:(1)画家算法(优先度法);先将屏幕置为背景色,然后将物体的各个面距视点远近排序,按由远及近的顺序逐投影到屏幕上,显示多边形所包含的实心区域。
由于后显示的区域将覆盖以前的区域,从而达到自然消隐的目的。
画家算法简单,容易实现。
缺点是只能处理不相交的区域,且深度优先级表中面的顺序可能出错。
(2)Z—buffer(深度缓冲器)法;Z—buffer算法采用缓冲区记录每个像素的深度值,保证每个像素都具有最大的深度值。
算法对面出现的先后没有要求,实现上比总统排序灵活,简单,有利于硬件实现。
但需要增加额外的缓存。
17.光照模型的概念及影响因素所谓光照模型,是根据光学物理的有关定律计算画面上景物表面各点投影到观察者眼中光亮度和色彩组成的公式。
对于地形立体图的绘制而言,一个好的光照模型应该满足以下要求:(1)能产生较好的立体视觉效果;(2)在理论上具有一定的合理性或严密性;(3)较小的计算量,以保证较快的绘制速度;对于自然景物中的地形表面,光照模型可考虑到以下几项影响:(1)光源的位置;(2)光源的强度;(3)视点的位置;(4)地面的漫反射光;(5)地面对光的反射和吸收特性。
18.分形理论的概念分形(Fractal)理论是非线性科学中的一个活跃的数学分支,其研究对象是在非线性系统中产生的不光滑河不可为的几何形体,对应的定量参数是分形维数。
19.分形维数的概念、作用20.分形集的特征:(1)精细的结构,具有任意小尺度下的细节;(2)分型基因太不规则而不能用传统的几何语言来描述;(3)某种自相似性,可能是近似的自相似或统计上的自相似;(4)其分形维数常大于其拓扑维数;(5)在多数情况下可递归的定义。
利用分形理论中的随机分维函数模型,来模拟生成自然景物中许多不规则物体和表面(如云,山体表面,数目,草地,烟火等),已获得了极大的成功21.纹理映射的基本思路、优点基本思想是:选择或找到该目标地区的地形纹理图,根据各种图像间的映射关系,从而将纹理图像按规定要求贴到三维地形图表面,使所生成的三维地形图即有立体感又有真实性。
纹理映射的优点是:由它产生的图像具有立体感和真实感,信息丰富,现势性强的三维影像实景图。
22.直接绘制法流程基于地形要素矢量数据的三维图就是充分利用已获得的各类地形矢量要素,将其栅格化和符号化处理,再结合三维地形图绘制的基本算法,生成以模拟灰度或颜色为背景,叠加各种地形要素(包括等高线、居民地、河流、道路、文字注记等)的地形矢量要素三维图。