清华大学版理论力学课后习题答案大全_____第12章虚位移原理及其应用习题解
清华大学版理论力学课后习题答案大全_____第3章静力学平衡问题习题解
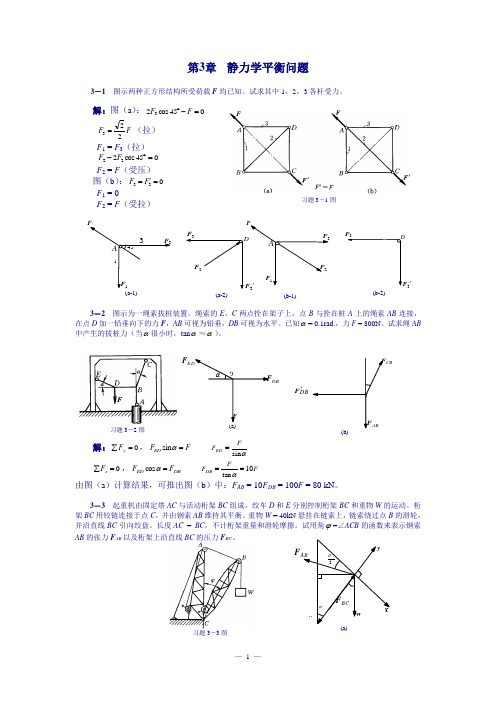
F DBCBDBF '习题3-3图第3章 静力学平衡问题3-1 图示两种正方形结构所受荷载F 均已知。
试求其中1,2,3各杆受力。
解:图(a ):045cos 23=-︒F FF F 223=(拉) F 1 = F 3(拉) 045cos 232=︒-F F F 2 = F (受压) 图(b ):033='=F F F 1 = 0F 2 = F (受拉)3-2 图示为一绳索拔桩装置。
绳索的E 、C 两点拴在架子上,点B 与拴在桩A 上的绳索AB 连接,在点D 加一铅垂向下的力F ,AB 可视为铅垂,DB 可视为水平。
已知α= 0.1rad.,力F = 800N 。
试求绳AB 中产生的拔桩力(当α很小时,tan α≈α)。
解:0=∑y F ,F F ED =αsin αs i nFF ED = 0=∑x F ,DB ED F F =αcos F FF DB 10tan ==α由图(a )计算结果,可推出图(b )中:F AB = 10F DB = 100F = 80 kN 。
3-3 起重机由固定塔AC 与活动桁架BC 组成,绞车D 和E 分别控制桁架BC 和重物W 的运动。
桁架BC 用铰链连接于点C ,并由钢索AB 维持其平衡。
重物W = 40kN 悬挂在链索上,链索绕过点B 的滑轮,并沿直线BC 引向绞盘。
长度AC = BC ,不计桁架重量和滑轮摩擦。
试用角ϕ=∠ACB 的函数来表示钢索AB 的张力F AB 以及桁架上沿直线BC 的压力F BC 。
(b-1)习题3-1图(a-1)(a-2)'3(b-2)习题3-2图F习题3-5图习题3-4图 解:图(a ):0=∑x F ,0sin 2cos=-ϕϕW F AB ,2sin2ϕW F AB =0=∑y F ,02sincos =---ϕϕAB BC F W W F即 2s i n 2c o s 2ϕϕW W W F BC ++=W W W W 2)c o s 1(c o s =-++=ϕϕ3-4 杆AB 及其两端滚子的整体重心在G 点,滚子搁置在倾斜的光滑刚性平面上,如图所示。
理论力学课后习题答案

理论力学(盛冬发)课后习题答案c h12(总14页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第12章动能定理一、是非题(正确的在括号内打“√”、错误的打“×”)1.圆轮纯滚动时,与地面接触点的法向约束力和滑动摩擦力均不做功。
( √ )2.理想约束的约束反力做功之和恒等于零。
( √ )3.由于质点系中的内力成对出现,所以内力的功的代数和恒等于零。
( × )4.弹簧从原长压缩10cm和拉长10cm,弹簧力做功相等。
( √ )5.质点系动能的变化与作用在质点系上的外力有关,与内力无关。
( × )6.三个质量相同的质点,从距地相同的高度上,以相同的初速度,一个向上抛出,一个水平抛出,一个向下抛出,则三质点落地时的速度相等。
( √ )7.动能定理的方程是矢量式。
( × )8.弹簧由其自然位置拉长10cm,再拉长10cm,在这两个过程中弹力做功相等。
143144( × )二、填空题1.当质点在铅垂平面内恰好转过一周时,其重力所做的功为 0 。
2.在理想约束的条件下,约束反力所做的功的代数和为零。
3.如图所示,质量为1m 的均质杆OA ,一端铰接在质量为2m 的均质圆轮的轮心,另一端放在水平面上,圆轮在地面上做纯滚动,若轮心的速度为o v ,则系统的动能=T 222014321v m v m +。
4.圆轮的一端连接弹簧,其刚度系数为k ,另一端连接一重量为P 的重物,如图所示。
初始时弹簧为自然长,当重物下降为h 时,系统的总功=W 221kh Ph -。
图 图5.如图所示的曲柄连杆机构,滑块A 与滑道BC 之间的摩擦力是系统的内力,设已知摩擦力为F 且等于常数,则曲柄转一周摩擦力的功为Fr 4-。
1456.平行四边形机构如图所示,r B O A O ==21,B O A O 21//,曲柄A O 1以角速度ω转动。
清华大学本校用理论力学课件4-1 虚位移原理

2
P2
W
解
第4章
虚 位 移 原 理 及 应 用
约束是理想的,可用虚功原理。 r3 y tan r2 r3 x r2 r tan tan r3 y 1 r3 y tan r3 x r 1
虚功原理: P r P r2 W r3 y 0 1 1 2
虚功原理: A P rA Q rB 0
P rB tan Q rA
P
y
A
rA
O
l
rB
B
x
Q
解
解析法
第4章
2 2 约束方程: xB yA l 2
虚 位 移 原 理 及 应 用
变分得: 2 xB xB 2 yA yA 0 xB yA xB cot xB yA 虚功原理: y Q xB P yA 0
第1节
虚位移原理
2013年8月23日
虚位移原理
第4章
虚 位 移 原 理 及 应 用
具有理想约束的质点系,在给定位置处于平 衡的充分必要条件是:主动力系在质点系的 任意虚位移上所作的虚功等于零,即:
( F r 0 F δx F δy F δz ) 0
i i
xi i yi i zi i
P
P Q tan
A l
O
B Q
x
例5
第4章
虚 位 移 原 理 及 应 用
已知:a, P, M; 求:约束反力NB
a
a
M A
C
a
a
P B
解
第4章
(1) 解除B水平约束,求NBx
理论力学课后题参考答案

1.1 沿水平方向前进的枪弹,通过某一距离s 的时间为t 1,而通过下一等距离s 的时间为2t .试证明枪弹的减速度(假定是常数)为由题可知示意图如题1.1.1图: {{SSt t 题1.1.1图设开始计时的时刻速度为0v ,由题可知枪弹作匀减速运动设减速度大小为a .则有:()()⎪⎪⎩⎪⎪⎨⎧+-+=-=221210211021221t t a t t v s at t v s 由以上两式得 11021at t s v +=再由此式得 ()()2121122t t t t t t s a +-=1.26一弹性绳上端固定,下端悬有m 及m '两质点。
设a 为绳的固有长度,b 为加m 后的伸长,c 为加m '后的伸长。
今将m '任其脱离而下坠,试证质点m 在任一瞬时离上端O 的距离为解 以绳顶端为坐标原点.建立如题1.26.1图所示坐标系.题1.26.1图设绳的弹性系数为k ,则有 kb mg = ① 当 m '脱离下坠前,m 与m '系统平衡.当m '脱离下坠前,m 在拉力T 作用下上升,之后作简运.运动微分方程为 ()ym a y k mg &&=-- ② 联立①② 得 b b a g y b g y +=+&& ③ 0=+y bg y &&齐次方程通解 t b g A t b g A Y sin cos 211+= 非齐次方程③的特解 b a Y +=0 所以③的通解b a t bg A t b g A Y +++=sin cos 211代入初始条件:0=t 时,,c b a y ++=得0,21==A c A ;故有 b a t b g c y ++=cos 即为m 在任一时刻离上端O 的距离.'1.39 一质点受一与距离23次方成反比的引力作用在一直线上运动。
试证此质点自无穷远到达a 时的速率和自a 静止出发到达4a 时的速率相同。
理论力学课后习题答案
理论力学课后习题答案理论力学课后习题答案引言:理论力学是物理学的基础课程之一,对于理解和应用物理学的原理和方法具有重要意义。
在学习理论力学的过程中,课后习题是巩固知识、提高能力的重要途径。
本文将针对理论力学课后习题进行解答,帮助读者更好地理解和掌握这门课程。
第一章:牛顿力学1. 一个物体以初速度v0沿直线运动,加速度为a,求物体的位移与时间的关系。
答:根据牛顿第二定律F=ma,可得物体所受合力F=ma=mv/t,其中m为物体的质量,v为物体的速度,t为时间。
由此可得物体的位移s=vt+1/2at^2。
2. 一个质点在重力作用下自由下落,求它在t时刻的速度和位移。
答:在重力作用下,质点的加速度为g,即a=g。
根据牛顿第二定律F=ma,可得质点所受合力F=mg。
根据牛顿第一定律,质点的速度随时间的变化率为v=g*t,位移随时间的变化率为s=1/2gt^2。
第二章:拉格朗日力学1. 一个质点沿半径为R的圆周运动,求它的动能和势能。
答:质点的动能由动能定理可得,即K=1/2mv^2,其中m为质点的质量,v为质点的速度。
质点的势能由引力势能可得,即U=-GmM/R,其中G为引力常数,M为圆周的质量。
2. 一个质点在势能为U(r)的力场中运动,求它的运动方程。
答:根据拉格朗日方程可得,质点的运动方程为d/dt(dL/dv)-dL/dr=0,其中L=T-U,T为质点的动能,U为质点的势能。
第三章:哈密顿力学1. 一个质点在势能为U(x)的力场中运动,求它的哈密顿量和哈密顿运动方程。
答:质点的哈密顿量由哈密顿定理可得,即H=T+U,其中T为质点的动能,U为质点的势能。
质点的哈密顿运动方程为dp/dt=-dH/dx,其中p为质点的动量。
2. 一个质点在势能为U(x)的力场中运动,求它的哈密顿正则方程。
答:质点的哈密顿正则方程为dx/dt=dH/dp,dp/dt=-dH/dx,其中x为质点的位置,p为质点的动量。
结论:通过对理论力学课后习题的解答,我们可以更深入地理解和应用物理学的原理和方法。
《理论力学》课后习题解答(赫桐生版)
理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。
理论力学课后习题及答案解析
理论力学课后习题及答案解析文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-MG129]第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A 点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力RB和一个力偶M B,且:如图所示;将RB向下平移一段距离d,使满足:最后简化为一个力R,大小等于RB。
其几何意义是:R 的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力RA和一个力偶M A,且:如图所示;将RA向右平移一段距离d,使满足:最后简化为一个力R,大小等于RA。
其几何意义是:R 的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。
清华大学版理论力学课后习题答案大全第10章动能定理及其应用习题解

CA(a)ωO(a)第10章动能定理及其应用10-1计算图示各系统的动能:1.质量为m ,半径为r 的均质圆盘在其自身平面内作平面运动。
在图示位置时,若已知圆盘上A、B 两点的速度方向如图示,B 点的速度为v B ,θ =45º(图a )。
2.图示质量为m 1的均质杆OA ,一端铰接在质量为m 2的均质圆盘中心,另一端放在水平面上,圆盘在地面上作纯滚动,圆心速度为v (图b )。
3.质量为m 的均质细圆环半径为R ,其上固结一个质量也为m 的质点A 。
细圆环在水平面上作纯滚动,图示瞬时角速度为ω(图c )。
解:1.2222221632(2121)2(212121B B B C C C mv r v mr v m J mv T =⋅+=+=ω2.222122222214321(21212121vm v m r v r m v m v m T +=⋅++=3.22222222)2(212121ωωωωmR R m mR mR T =++=10-2图示滑块A 重力为1W ,可在滑道内滑动,与滑块A 用铰链连接的是重力为2W 、长为l 的匀质杆AB 。
现已知道滑块沿滑道的速度为1v ,杆AB 的角速度为1ω。
当杆与铅垂线的夹角为ϕ时,试求系统的动能。
解:图(a )BA T T T +=)2121(21222211ωC C J v g W v g W ++=21221121212211122]cos 22)2[(22ωϕω⋅⋅+⋅++++=l g W l l v l v l g W v g W ]cos 31)[(2111221222121ϕωωv l W l W v W W g +++=10-3重力为P F 、半径为r 的齿轮II 与半径为r R 3=的固定内齿轮I 相啮合。
齿轮II 通过匀质的曲柄OC 带动而运动。
曲柄的重力为Q F ,角速度为ω,齿轮可视为匀质圆盘。
试求行星齿轮机构的动能。
清华大学版理论力学课后习题答案大全
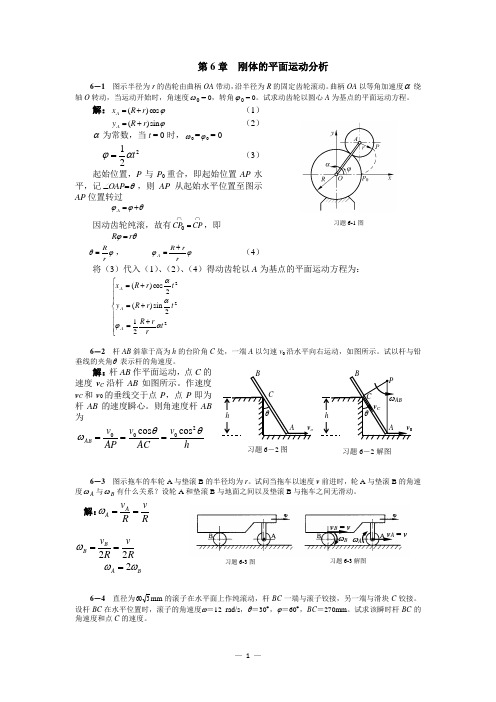
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕc o s )(r R x A += (1) ϕsin )(r R y A +=(2)α为常数,当t = 0时,0ω=0ϕ= 0221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R = ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角θ 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:RvR v A A ==ωR v R v B B 22==ωB A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度ω=12 rad/s ,θ=30︒,ϕ=60︒,BC =270mm 。
试求该瞬时杆BC 的角速度和点C 的速度。
理论力学课后习题及答案解析..

第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力R B和一个力偶M B,且:如图所示;将R B向下平移一段距离d,使满足:最后简化为一个力R,大小等于R B。
其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力R A和一个力偶M A,且:如图所示;将R A向右平移一段距离d,使满足:最后简化为一个力R,大小等于R A。
其几何意义是:R的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。
清华大学版理论力学课后习题答案大全第13章 动力学普遍方程习题解
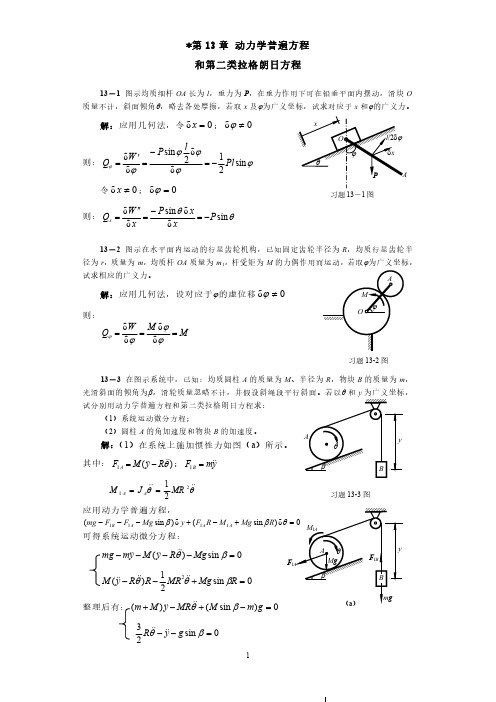
习题13-1图*第13章动力学普遍方程和第二类拉格朗日方程13-1图示均质细杆OA 长为l ,重力为P ,在重力作用下可在铅垂平面内摆动,滑块O 质量不计,斜面倾角θ,略去各处摩擦,若取x 及ϕ为广义坐标,试求对应于x 和ϕ的广义力。
解:应用几何法,令0δ=x ;0δ≠ϕ则:ϕϕϕϕϕϕsin 21δδ2sin δδPl lP W Q -=-='=令0δ≠x ;0δ=ϕ则:θθsin δδsin δδP xxP x W Q x -=-=''=13-2图示在水平面内运动的行星齿轮机构,已知固定齿轮半径为R ,均质行星齿轮半径为r ,质量为m ,均质杆OA 质量为m 1,杆受矩为M 的力偶作用而运动,若取ϕ为广义坐标,试求相应的广义力。
解:应用几何法,设对应于ϕ的虚位移0δ≠ϕ则:M M W Q ===ϕϕϕϕδδδδ13-3在图示系统中,已知:均质圆柱A 的质量为M 、半径为R ,物块B 的质量为m ,光滑斜面的倾角为β,滑轮质量忽略不计,并假设斜绳段平行斜面。
若以θ 和y 为广义坐标,试分别用动力学普遍方程和第二类拉格朗日方程求:(1)系统运动微分方程;(2)圆柱A 的角加速度和物块B 的加速度。
解:(1)在系统上施加惯性力如图(a )所示。
其中:)(I θ R y M F A -=;y m F B=I θθ2I 21MR J M A A ==应用动力学普遍方程,δ)sin (δ)sin (I I I I +-+---θββR Mg M R F y Mg F F mg A A A B 可得系统运动微分方程:0sin )(=----βθMg R y M y m mg 0sin 21)(2=+--R Mg MR R R yM βθθ 整理后有:0)sin ()(=-+-+g m M MR yM m βθ 0sin 23=--βθg yR习题13-2图习题13-3图F应用第二类拉格朗日方程:2222)(21212121θθ R y M MR y m T -+⋅+=;)(sin θβR y Mg mgy V -+-==-=V T L 2222)(21212121θθ R y M MR y m -+⋅+)(sin θβR y Mg mgy --+)(d d θ R yM y m y L t -+=∂∂;βsin Mg mg y L -=∂∂0d d =∂∂-∂∂y L y L t ;0)sin ()(=-+-+g m M MR y M m βθ (a ))(21d d 2θθθ R y RM MR L t --=∂∂;R Mg L βθsin =∂∂0d d =∂∂-∂∂θθL L t;0sin 23=--βθg y R (b )(2)求圆柱A 的角加速度和物块B 的加速度。
理论力学解答(清华版)

第一章 静力学基本概念1-1 考虑力对物体作用的运动效应,力是( A )。
A.滑动矢量B.自由矢量C.定位矢量1-2 如图1-18所示,作用在物体A 上的两个大小不等的力1F 和2F ,沿同一直线但方向相反,则其合力可表为( C )。
A.1F –2FB.2F - 1FC.1F +2F图1-18 图1-191-3 F =100N ,方向如图1-19所示。
若将F 沿图示x ,y 方向分解,则x 方向分力的大小x F = C N ,y 方向分力的大小y F = ___B __ N 。
A. 86.6B. 70.0C. 136.6D.25.91-4 力的可传性只适用于 A 。
A. 刚体B. 变形体1-5 加减平衡力系公理适用于 C 。
A. 刚体;B. 变形体;C. 刚体和变形体。
1-6 如图1-20所示,已知一正方体,各边长a ,沿对角线BH 作用一个力F ,则该力在x 1轴上的投影为 A 。
A. 0B. F/2C. F/6D.-F/31-7如图1-20所示,已知F=100N ,则其在三个坐标轴上的投影分别为: Fx = -402N ,Fy = 302N ,Fz = 502 N 。
图1-20 图1-21第二章力系的简化2-1.通过A(3,0,0),B(0,4,5)两点(长度单位为米),且由A指向B的力F,在z轴上投影为,对z轴的矩的大小为。
答:F/2;62F/5。
2-2.已知力F的大小,角度φ和θ,以及长方体的边长a,b,c,则力F在轴z和y上的投影:Fz= ;Fy= ;F对轴x的矩M x(F)= 。
答:Fz=F·sinφ;Fy=-F·cosφ·cosφ;Mx(F)=F(b·sinφ+c·cosφ·cosθ)图2-40 图2-412-3.力通过A(3,4、0),B(0,4,4)两点(长度单位为米),若F=100N,则该力在x轴上的投影为,对x轴的矩为。
《理论力学》课后习题解答(赫桐生版)
理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。
理论力学课后习题答案
理论力学课后习题答案1. 第一题题目:一个质点从初始点A沿着一条直线运动到达点A,在此过程中质点受到一个恒定的力A的作用。
求解质点从A 到A的位移A和速度A与时间A的关系。
解答:根据牛顿第二定律A=AA,我们可以得到质点在恒定力作用下的运动方程为 $F = m \\frac{dv}{dt}$。
即:$$F = m \\frac{dx}{dt}$$将方程变形可得:$$dx = \\frac{F}{m} dt$$对上式两边同时积分可得:$$\\int_{x_A}^{x_B} dx = \\frac{1}{m} \\int_0^t F dt$$化简后可得:$$x_B - x_A = \\frac{1}{m} \\int_0^t F dt$$即质点从初始点A移动到达点A时的位移A与时间A的关系为:$$x = x_A + \\frac{1}{m} \\int_0^t F dt$$2. 第二题题目:一个滑块在一个光滑的水平轨道上,质量为A,受到一根拉力为A的绳子的作用。
求解滑块的加速度A。
解答:根据牛顿第二定律A=AA,可以得到滑块的加速度A与拉力A的关系为 $a = \\frac{F}{m}$。
3. 第三题题目:一个质点在一个弹簧的作用下振动,弹簧的劲度系数为A,质量为A。
求解质点的振动周期A。
解答:质点在弹簧的作用下振动,其运动方程为 $m\\frac{d^2x}{dt^2} = -kx$,其中A为质点的位移。
对上式进行变形可得:$$\\frac{d^2x}{dt^2} = -\\frac{k}{m}x$$该微分方程的通解为 $x = A \\sin(\\sqrt{\\frac{k}{m}} t + \\phi)$,其中A为振幅,$\\phi$ 为相位角。
振动周期A可以通过求解动能和势能的平衡关系来得到。
在振动过程中,动能 $K = \\frac{1}{2} m v^2$ 和势能 $U =\\frac{1}{2} k x^2$ 之和保持不变。
理论力学课后习题答案详解

理论力学习题解答 第 8 页 共 48 页
理论力学习题解答 第 9 页 共 48 页
理论力学习题解答 第 10 页 共 48 页
理论力学习题解答 第 11 页 共 48 页
理论力学习题解答 第 12 页 共 48 页
理论力学习题解答 第 13 页 共 48 页
理论力学习题解答 第 14 页 共 48 页
理论力学习题解答 第 36 页 共 48 页
理论力学习题解答 第 37 页 共 48 页
理论力学习题解答 第 38 页 共 48 页
理论力学习题解答 第 39 页 共 48 页
理论力学习题解答 第 40 页 共 48 页
理论力学习题解答 第 41 页 共 48 页
理论力学习题解答 第 42 页 共 48 页
理论力学习题解答
理论力学习题解答:
第 1 页 共 48 页
理论力学习题解答 第 2 页 共 48 页
理论力学习题解答
第二章:
第 3 页 共 48 页
理论力学习题解答 第 4 页 共 48 页
理论力学习题解答 第 5 页 共 48 页
理论力学习题解答 第 6 页 共 48 页
理论力学习题解答 第 7 页 共 48 页
理论力学习题解答 第 43 页 共 48 页
理论力学习题解答 第 44 页 共 48 页
理论力学习题解答 第 45 页 共 48 页
理论力学习题解答 第 46 页 共 48 页
理论力学习题解答 第 47 页 共 48 页
理论力学习题解答 第 48 页 共 48 页
理论力学习题解答 第 22 页 共 48 页
理论力学习题解答 第 23 页 共 48 页
理论力学习题解答 第 24 页 共 48 页
理论力学习题详细解答 第12章 虚位移原理及其应用习题解

第12章 虚位移原理及其应用12-1 图示结构由8根无重杆铰接成三个相同的菱形。
试求平衡时,主动力F 1与F 2的大小关系。
解:应用解析法,如图(a ),设OD = lθsin 2l y A =;θsin 6l y B =θθδcos 2δl y A =;θθδcos 6δl y B =应用虚位移原理:0δδ12=⋅-⋅A B y F y F02612=-F F;213F F =12-2图示的平面机构中,D 点作用一水平力F 1,求保持机构平衡时主动力F 2之值。
已知:AC = BC= EC = DE = FC = DF = l 。
解:应用解析法,如图所示:θcos l y A =;θsin 3l x D = θθδsin δl y A -=;θθδcos 3δl x D =应用虚位移原理:0δδ12=⋅-⋅-D A x F y F0cos3sin 12=-θθF F ;θcot 312F F =12-3 图示楔形机构处于平衡状态,尖劈角为θ和β,不计楔块自重与摩擦。
求竖向力F 1与F 2的大小关系。
解:如图(a ),应用虚位移原理:0δδ2211=⋅+⋅r F r F 如图(b ):βθtan δδtan δ2a 1r r r ==;12δtan tan δr r θβ=0δtan tan δ1211=⋅-⋅r θβF r F ;θβtan tan 21⋅=F F12-4 图示摇杆机构位于水平面上,已知OO 1 = OA 。
机构上受到力偶矩M 1和M 2的作用。
机构在可能的任意角度θ下处于平衡时,求M 1和M 2之间的关系。
习题12-1图(a )习题12-2解图习题12-3(a )r a(b )解:应用虚位移原理:0δδ2211=⋅-⋅ϕϕM M (1)如图所示,e a δcos δr r =θ其中:`1a δδϕ⋅=OA r ;2e δcos 2δϕθ⋅⋅=OA r 所以:21δ2δϕϕ=,代入式(1)得:122M M =12-5 等长的AB 、BC 、CD 三直杆在B 、C 铰接并用铰支座A 、D 固定,如图所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
解:如图(a ),应用虚位移原理:F 1 •術 F 2 • 8r 2 = 0书鹵 / 、8r 18r 2tan P如图(b ):8廿y ; 8厂乔8r i能的任意角度B 下处于平衡时,求 M 1和M 2之间的关系第12章 虚位移原理及其应用12-1图示结构由8根无重杆铰接成三个相同的菱形。
试求平衡时,解:应用解析法,如图(a ),设0D =y A = 2l sin v ; y^ 61 sin vS y A =21 cos :心; 溉=61 COST 心应用虚位移原理:F 2 S y B - R • S y A =06F 2 —2R =0 ; F i =3F 2习题12-1图F 2之值。
已知:AC = BC12-2图示的平面机构中,D 点作用一水平力F t ,求保持机构平衡时主动力=EC = DE = FC = DF = l 。
解:应用解析法,如图所示: y A =lcos ); x D =3lsin v S y A - -l sin^ 心;Sx D =3I COS ^ & 应用虚位移原理: —F 2 • S y A - F I 8x^0F 2sin J - 3F t cos ^ - 0 ; F 2 = 3F t cot^ 12-3图示楔形机构处于平衡状态,尖劈角为小关系 习题12-3B 和3不计楔块自重与摩擦。
求竖向力F 1与F 2的大F iF 2|(a )(b)F i 8i - F 212-4图示摇杆机构位于水平面上,已知OO i = OA 。
机构上受到力偶矩M 1和M 2的作用。
机构在可如图所示,5r a cosv - 5r e其中:5r a =OA - 5 “、; 5r e =2cos OA - 5 2 所以:5 i =2 5 2,代入式(1)得:M 2 =2M i12-5等长的AB 、BC 、CD 三直杆在B 、C 铰接并用铰支座 A 、D 固定,如图所示。
设在三杆上各有 一力偶作用,其力偶矩的大小分别为 M i 、M 2和M 3。
求在图示位置平衡时三个力偶矩之间的关系(各杆重不计)。
解:应用虚位移原理:M 1 5 1 M 2 5 2 M 3 5 3=0(1 )如图所示,5r C sin60 = 5r B ; 5r C cos60 = §r CB设二杆长均为I ,则有:5r B =l 5 1'; 5r C =l 5 3;所以:一9 5 3 二 5 1,1 5 3 二 5 2 代入式(1)得:2 2应用虚位移原理:mg - 5y E ■ 2mg 5y F ■ 2mg 5y G = 0即:mg —COST 5丁 ::,2mg (bcos r 5〔 ::; bcos 5 ) 2mgbcos 1 51=0( 1)解:应用虚位移原理: M j 飞“-M 22=5rCB = 1—M1 丄皿2M 3 =0 ;2 2,3M 1 M 2 2M 3 =012-6图示三根均质杆相铰接 AC = b ,CD = BD = 2 b ,AB = 3b , AB 水平,各杆重力与其长度成正比。
求平衡时9> B 与Y 间的关系。
应用解析法,如图所示:b .sin 二; 2解: 5Y Eb cos 2Y F =bsi n : bsi n ; 5Y F 二bcos : 5 bcos 5Y G =bsin :5y G = bcos : 5:(1、丁B2根据几何关系:bsi2bsin =2bsin :; 3b =bcos^ 2bcos 2bcos:;bcos二5 2bcos 5 = 2bcos :5:;5 cOs - 5 cOs-对上两式求变分:2 cos P cos P_bsin v 3: . .2b sin 3 -2b sin : 3 : =0 ;心,n C0Stan〕 3 ; 3L (cos _co^Sin C0S tanj 3sin 日 +cosT tan Pcos Psin 日 + cos 日 tan P将上式代入式(1),有:l sin 了 +cos^tanB v tan 日cos?-sin?— 5mg 2mgcos 2mgtan 日+ta n 0tan 日+ta n 0-5(sin cos tan :) 2cos (tanv tan :) 2(tanvcos —sin ) = 0 -5(tantan :) 2(tan )tan :) 2(tan v - tan )=04tan ^ - 7 tan -3tan : = 012-7计算下列机构在图示位置平衡时主动力之间的关系。
构件的自重及各处摩擦忽略不计。
2rF tan :cot -解:图(a ): F ■ 3r^M 3^=0 ; 3r C cos60”= 3r D cos30°— 3r—F 3 3r D -MrD=0; M = ..3Fll图(b ): F 2 3r e — M 邑=0 ;elF 3r a - M 3^ = 0 ;图(c ): F 3r C —M .並=0 ;r cot 日 +ta n ® 3A 3r c3r a cos60 二 3r eM = Fl3r A cos 二 3B COS (「_ R ; 3r C cosv - 3r B sin2寸F 3C _M tan 「co L2r3d =0FCB(c )器(詈一1000 2)「259.8 512-10在图示结构中,已知铅垂作用力 F ,力偶矩为M 的力偶,尺寸I 。
试求支座B 与C 处的约束 力。
解:解除B 处约束,系统的虚位移如图(a ), 应用虚位移原理:F B —FM - 2 -0 (1)其中:2D =2 2B ; 2=电=绝I I 代入式(1)得:F B 2B -F 2 2 M 2 2 =0I 2M M F B =2F 2(F) II解除C 处约束,系统的虚位移如图(b ), 应用虚位移原理:F C 2C - M 2: = 0( 2)将2C T 2代入式(2)得:F C =—大小。
解:应用虚位移原理:F • 2r B (1)如图所示,SfaSin J - ;其中: §r a = I M ; 沉二亍 l sin rOM:r a& B-F习题12-8解图所以:l M sin v - sin^ §r B , 代入式(1)得:F = M l 12-9机构如图,已知 OA = 20cm , 伸变形,s 解: M 1 O i D = 15cm , O i D // OB ,弹簧的弹性系数 k = 1000N/cm ,已经拉如图所示, 代入式(1)得:M<!2A _FOAO 1 DFBC 'IAB土 I 二 亠I -■ IMM12-11在图示多跨静定梁中,已知 F = 50kN , q = 2.5kN/m , M = 5kNm , l = 3m 。
试求支座 A 、B 与 E 处的约束力。
解:解除A 处约束,系统的虚位移如图(a ), 应用虚位移原理:F A 沁「F 沁 2ql (E 「i &2)& ■- 0(1)其中:血=比=匹;阡2 =出;寥:二电24 ' 41代入式(1)得:F5 1(F A - 2ql - M ) 3・=0 ; F A =6.667 kN2 4 4l解除B 处约束,系统的虚位移如图(b )。
F &F -F B 洙 2ql (莎沁)-M 住=0(2)其中:弘=电;话=&2=沁;心:=阵2 22l代入式(2)得:F 1( F B 6ql -M ) S r B =0 ; F^ 69.167 kN 2 2l解除E 处约束,系统的虚位移如图(c )。
2ql - F E S T E M 知—0 (3) 将&2 =l 心;S E =41 宀代入式(3)得:(2ql 2-4lF E M ) & - 0 ; F^ 4.167kN12-12试求图示梁——桁架组合结构中 1、2两杆的内力解:1•求杆1内力,给图(a )虚位移,则S y D ―3S 甘,S y E =23 0 S T F :d5 S <1, S T G :d5 S T 1虚功式-F i S y D _F 2 S y E • F N1S r F cos':;亠F N1 S r G cos =033 即 一斤 3S V -F 2 2S V -F N1 5S556F N 1 =3R 2F 2 F N 1 1- =1- kN (受拉)2332•求杆2内力,给图(b )虚位移,贝US T H =4 , Sg ^S S HS 「E=2 S E , S 「G 三 S BSr F , Sr G 在FG 方向投影响相等,即S 「F cos 二S 「G cos !■ S 「F 二 S 「G虚功式-F1S 「D -F N 2S 「H -F 2S T E 一F N 2 S T F sin =01旳 一 21.2l -2l .A I HHbilH A E- ,B~C~D(c)(b4即 _F i 38 0 _F N 2 4 j.O _F 2 2 汕—F ”? 5 汕.=058F N 2 二」F i _2F2=22kN 11F N 2 - -— kN412-13 在图示结构中,已知 F = 4kN ,q = 3kN/m ,M = 2kN m ,BD = CD , AC = CB = 4m , 9= 30o 。
试求固定端 A 处的约束力偶 M A 与铅垂方向的约束力 F Ay 。
M A 8 : 2q 8r -Fsi nr 85 =0(1) 其中:8r =18 ;8c = 8「D = 8「B =4 8 代入式(1)得:(M A 2q -4F s in r ) 8 =0 M A =4F sin T 1 -2q =2 kN m解除A 处铅垂方向位移的 约束,系统的虚位移如图(b )。
应用虚位移原理:F Ay 8r A - F COS 2 v §r D M 8 BC = 0(2)其中:8% = 8r c =4cos r 8 BC ; 8D =2 8 BC1 F — M代入式(2)得:(F Ay 4C0S 八 Fcos2r 2 M) 8 BC ; F A -1-F - -0.577 kN4cos30°12 -14图示结构由三个刚体组成,已知F = 3kN ,解:解除A 处约束力偶,系统的虚位移如图( a )。
二三二I 习题12-13图解:解除B处约束,系统的虚位移如图(-F B 8r B sin :::-M 8CE F 8「F =0其中:sin = 1;8E=2 8「F=41 8CE;8r C=3・2l8CE;8Bv'10 <10代入式(1)得:(-F B I -M ■ F 2l) 8CE=0 ; F B(1)8r c 3 2l = 8 C E二—M F 21 =5kN a)。