自动控制原理实验教程第4章
自动控制原理-第4章 根轨迹

又 ∵ 根轨迹方程
n
n
(spi) sn( pi)sn 1L
n
m
Kim 1
i 1 m
snm( pi zj)snm 1L
(szj) sm( zj)sm 1L
i 1
j 1
j 1
j 1
n
m
∴ sn-m-1项系数对应相等
(nm)(a) pi zj
n
m
i1
j1
(2k 1) ,
nm
pi zi
闭环零、极点与开环零、极点的关系
闭环传递函数 (s) G(s)
1G(s)H(s)
开环传递函数 Gk(s)G(s)H(s)
f
l
(s zi)
(s z j)
G (s) KG
i 1 q
H
(s)
K
H
j 1 h
(s pi)
(s p j)
i 1
j 1
f
l
(szi)(szj)
Gk(s)G(s)H(s)K
如何应用根轨迹方程在[s]平面上找到闭环极点。
解: G ( s ) K 0 .5 K K * s(2 s 1) s(s 0.5) s(s 0.5)
K * 0.5 K 开 环 极 点 p1 0, p2 0.5 无开环零点 根据相角方程
s2
p2 4 5 o -0.5 s1
135o
p1 0
m
(s z j)
K j1 n
1
(s pi)
i1
m
n
(szj) (spi)(2k1)
j1
i1
k0,1,2,L
(1)相角条件是决定闭环根轨迹的充要条件; 在测量相角时,规定以逆
自动控制原理 第四章 根轨迹法
第4章 根 轨 迹 法根轨迹法是分析和设计线性控制系统的图解方法,使用简便,在控制工程上得到了广泛应用。
本章首先介绍根轨迹的基本概念,然后重点介绍根轨迹绘制的基本法则,在此基础上,进一步讨论广义根轨迹的问题,最后介绍控制系统的根轨迹分析方法。
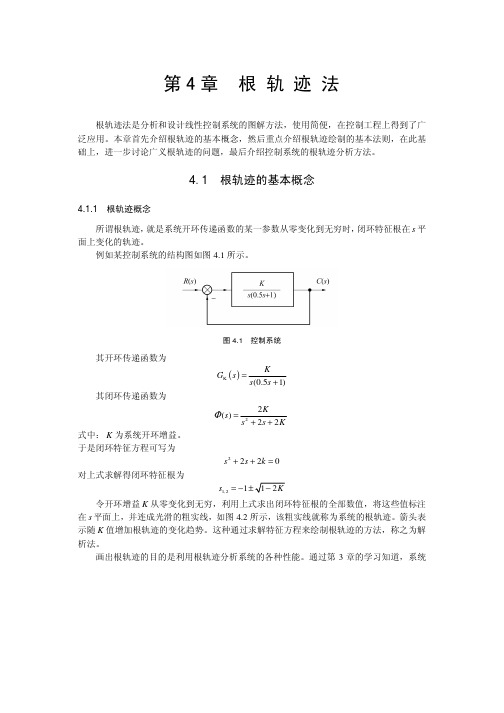
4.1 根轨迹的基本概念4.1.1 根轨迹概念所谓根轨迹,就是系统开环传递函数的某一参数从零变化到无穷时,闭环特征根在s 平面上变化的轨迹。
例如某控制系统的结构图如图4.1所示。
图4.1 控制系统其开环传递函数为()K (0.51)KG s s s =+其闭环传递函数为22()22Ks s s KΦ=++式中:K 为系统开环增益。
于是闭环特征方程可写为2220s s k ++=对上式求解得闭环特征根为1,21s =−令开环增益K 从零变化到无穷,利用上式求出闭环特征根的全部数值,将这些值标注在s 平面上,并连成光滑的粗实线,如图4.2所示,该粗实线就称为系统的根轨迹。
箭头表示随K 值增加根轨迹的变化趋势。
这种通过求解特征方程来绘制根轨迹的方法,称之为解析法。
画出根轨迹的目的是利用根轨迹分析系统的各种性能。
通过第3章的学习知道,系统第4章 根轨迹法·101··101·特征根的分布与系统的稳定性、暂态性能密切相关,而根轨迹正是直观反应了特征根在复平面的位置以及变化情况,所以利用根轨迹很容易了解系统的稳定性和暂态性能。
又因为根轨迹上的任何一点都有与之对应的开环增益值,而开环增益与稳态误差成反比,因而通过根轨迹也可以确定出系统的稳态精度。
可以看出,根轨迹与系统性能之间有着比较密切的联系。
图4.2 控制系统根轨迹4.1.2 根轨迹方程对于高阶系统,求解特征方程是很困难的,因此采用解析法绘制根轨迹只适用于较简单的低阶系统。
而高阶系统根轨迹的绘制是根据已知的开环零、极点位置,采用图解的方法来实现的。
下面给出图解法绘制根轨迹的根轨迹方程。
自动控制原理实验教程
Ui(S )
TS
(3) 阶跃响应: Uo(t) = K + 1 t
T
(t ≥ 0)
(4) 模拟电路图:如图 1.1-6 所示。
其中 K = R1 / R0 ; T = R0C
4
自动控制原理
第 1 章 线性系统的时域分析
比例积分环节
R1
C
Ui
R0
_
10K
信号输入端
反相器
10K _
R0 = R1 = 200K; C = 1uF 或 2uF
Ui(S)
1
Uo(S)
TS
(2) 传递函数: Uo(S) = 1
Ui(S) TS
(3) 阶跃响应: Uo(t) = 1 t (t ≥ 0)
T
(4) 模拟电路图:如图 1.1-4 所示。
图 1.1-3
其中 T = R0C
Ui
R0
信号输入端
积分环节 C
_
反相器
10K
10K
_
Uo
输出测量端
R0 = 200K; C = 1uF 或 2uF
图 1.1-4 3
自动控制原理
(5) 理想与实际阶跃响应曲线对照: ① 取 R0 = 200K;C = 1uF。
理想阶跃响应曲线
Uo 无穷
Uo(t)
1 Ui(t)
0 0.2s
t
② 取 R0 = 200K;C = 2uF。
第 1 章 线性系统的时域分析
实测阶跃响应曲线
Uo
10V
Uo(t)
1 Ui(t)
(5) 理想与实际阶跃响应曲线对照: ① 取 R0 = R1 = 200K;C = 1uF。
图 1.1-6
自动控制原理-第四章 线性系统的根轨迹法(4)
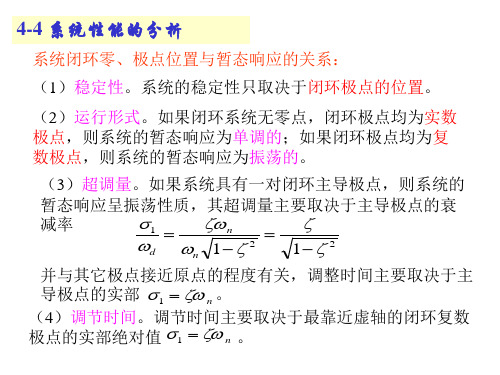
暂态响应呈振荡性质,其超调量主要取决于主导极点的衰
减率
1 n
d n 1 2
1 2
并与其它极点接近原点的程度有关,调整时间主要取决于主
导极点的实部
1
。
n
(4)调节时间。调节时间主要取决于最靠近虚轴的闭环复数
极点的实部绝对值 1 n 。
(5)实数零、极点影响。闭环极点的存在会增大系统的阻尼比, 使响应速度减慢,超调量减少。闭环零点的存在减小系统阻尼, 使响应速度加快,超调量增加。
4-4 系统性能的分析
系统闭环零、极点位置与暂态响应的关系:
(1)稳定性。系统的稳定性只取决于闭环极点的位置。
(2)运行形式。如果闭环系统无零点,闭环极点均为实数 极点,则系统的暂态响应为单调的;如果闭环极点均为复 数极点,则系统的暂态响应为振荡的。
(3)超调量。如果系统具有一对闭环主导极点,则系统的
4-7 线性系统根轨迹分析的MATLAB方法
1、绘制零极点分布图 :[ p,z]=pzmap(sys);
2、绘制根轨迹图 绘制根轨迹一般步骤为: (1)先将特征方程写成 1 A P(s) 0 形式,得到等效的开 环传递函数 G A P(s) ; Q(s)
Q(s)
(2)调用rlocus命令绘制根轨迹。
Hale Waihona Puke (6)偶极子及其影响。如果系统中存在非常接近的零点和极 点,其相互距离比其本身的模值小一个数量级以上,则把这对 闭环零、极点称为偶极子。偶极子的位置距离原点非常近时, 其对暂态响应的影响一般需要考虑,但不会影响闭环主导极点 的主导作用。偶极子的位置距离原点较远时,其对暂态响应的 影响可以忽略。 (7)主导极点及高阶系统化简。在s平面上,离虚轴靠 近而附近又没有其它闭环零点的一些闭环极点 ,对系统 影响最大,称为主导极点。凡比主导极点的实部大3~6 倍以上的其他闭环零、极点,其影响均可忽略不计。对 于高阶系统,略去不十分靠近原点的偶极子,保留一个 或几个最靠近虚轴又不十分靠近闭环零点的主导极点, 将高阶系统简化为只有一、两个闭环零点和两、三个闭 环极点的二阶或三阶系统。
《自动控制原理 》课件第4章

轴正方向夹角为ja,交点为σa的渐近线趋于无穷远处,其中:
渐近线与实轴正方向的夹角为
ja
(2k 1) π nm
(4-8)
k 0,1,2,,
渐近线与实轴正方向的交点为
n
m
pi z j
a
i1
j1
nm
(4-9)
设系统的开环传递函数如式(4-1),可将其展开为如下形式:
式(4-3)也可写为以下形式:
n
s pi
Kg
i 1 m
(4-5)
szj
j 1
若s平面上的点是闭环极点,则它与zj,pi所组成的向量必
定满足上述两方程,而且幅值条件方程与Kg有关,而相角
条件方程与Kg无关。所以满足相角条件方程的s值代入幅值
条件方程中,可以求得一个对应的Kg值,即s若满足相角条
图4-3 反馈控制系统
显然,满足Gk(s)=-1的点,即满足
m
Kg(s z j )
j1 n
1
(s pi )
(4-2)
i1
的点,都是系统的闭环特征根,必定在根轨迹上。所以称
式(4-2)为系统的根轨迹方程。
由式(4-2)可以看出,根轨迹法实质上是一种利用控制
系统开环传递函数求取系统闭环极点,从而分析闭环系统
m
lim s
(s z j )
j1
n
(s pi )
lim
s
s
1
mn
lim Kg
1 Kg
0
i1
上式说明,当Kg→∞时,s→∞为闭环特征根。所以(n-m) 条根轨迹将终止于无穷远处。
通常,称无穷远处的根轨迹终点为无限开环零点。从 这个意义上可以说,根轨迹起始于开环极点,终止于开环 零点。
自动控制原理第4章根轨迹法精

m
( zj )
K K*
J 1 n
( pi )
i 1
zj
1
j
(j
1,2,, m);
pi
1 Ti
(i
1,2,, n)
可写出幅值方程与相角方程,即
G(s)H (s) 1
G(s)H(s) 1
开环零点: z1 1.5; z2,3 2 j
(1)实轴(0~1.5)和( 2.5 ~ )有根轨迹。
(2)渐近线n=4 m=3,故只有一条根轨迹趋向无穷远。由实根
轨迹可知 180 。
(3)根轨迹出射角与入射角。
出射角
3
4
p2 ( 2K 1) ( p2 zi ) ( p2 pi )
d= -3.7
s2 4s 1 0
解法2 用公式有
1 1 1
d 1 j 2 d 1 j 2 d 2
解此方程 d1 3.7, d2 0.3
d1在根轨迹上,即为所求的分离点,d2不在根轨迹上舍去。 因为
z1 2, p1,2 1 j 2 n=2,m=1
系统有两条根轨迹,一条消失于零点,另一条趋于负无穷远 在实轴(-2,-∞)区段有根轨迹。 出射角
4.1根轨迹与根轨迹方程
什么是时域分析? 指控制系统在一定的输入下,根据输出量的时
域表达式,分析系统的稳定性、瞬态和稳态性能。
4.1.1 根轨迹 4.1.2 根轨迹方程
4.1.1 根轨迹
[根轨迹定义]:系统开环传递函数增益K(或某一参数)由零到 无穷大变化时,闭环系统特征根在S平面上移动的轨迹。
例:如图所示二阶系统,
孙炳达版 《自动控制原理》第4章 控制系统的根轨迹分析法-5
R(s)
s 1
k s 2 (s 2)
Y(s)
j
j
σ
-1/τ
σ
4.5 系统性能的根轨迹分析
系统开环传递函数:
Gk ( s) Kg s( s 2)(s 3)
Þ ¿ Î ª » ·Á ã µ ã
j¦ Ø 2 -3 -2 -1 0 ¦ Ò -2
增加零点-z
Gk ( s) K g (s z) s( s 2)(s 3)
4.5 系统性能的根轨迹分析
例 系统的结构图如下,
R(s)
K
s 2 2 s 5 ( s 2 )( s 0.5 )
Y(s)
要求: 1)用根轨迹法确定使系统稳定的K的取值范围; 2)用根轨迹法确定系统的阶跃响应不出现超调 量的K的最大值。
4.5 系统性能的根轨迹分析
解 由已知条件画出根轨迹如图, 其中根轨迹与虚轴的交点 分别为0和1.254j,对应的开环 增益K分别为0.2和0.75。 分离点为d=-0.409。 所以,系统稳定K的取值范围为:0.2<K<0.75 不出现超调量的K最大值出现在分离点处d=-0.409 处。将d代入 D( s ) ( s 2)(s 0.5)
由根轨迹图可测得该对主导极点为:
s1, 2 b jn n j 1 2 n 0.35 j 0.61
由根轨迹方程的幅值条件,可求得A、B两点:
Kg OA CA DA 2.3
根据闭环极点和的关系可求得另一闭环系统极 点s3=-4.3,它将不会使系统超调量增大,故取 Kg=2.3可满足要求。
4.5 系统性能的根轨迹分析
将零点z1<-10,系统根轨迹为 系统根轨迹仍有两条始 终位于S平面右半部, 系统仍无法稳定。
自动控制原理第4章

4.1 根轨迹法的基本概念 . 4.1.1 根轨迹的定义
WK (s) = K1K 2 N1(s)N 2 (s) D1(s)D2 (s) K g ∏(s + zi )
i =1 m
X r (s)
K1 N1 ( s ) D1 ( s ) K 2 N 2 ( s) D2 ( s)
典型结构图
第4章 根轨迹法 章
s 解此方程即得重根: = −σ d 。 按照这种思路,令 F ′(s) = 0 ,可求得产生重根时的根轨迹 放大系数 K gd ,将其代回闭环特征方程 F (s) ,即得计算分离点
和会合点的公式。
F ′(s) =[K gd N (s) + D(s)]′ = K gd N ′(s) + D′(s) = 0
第4章 根轨迹法 章
∏(s + p ) + K ∏(s + z ) = 0
j g i j =1 i =1
n
m
根轨迹是系统某一参数从零变化到无穷大时,闭环特征方 程的根在
s 复平面上变化的轨迹。因此,根轨迹的分支数必然
n 中的
与闭环特征方程根的数目相等。 根据上特征方程, 闭环特征方程根的数目等于 m 和 大者。
−和开环极点 zi
s 而言,所有开环有限零点
−σ k ,即
− pj 都汇集在一点,其位置为
− zi = − p j = −σ k
−σ k 就是所求的渐近线交点。
根据幅值条件得:
第4章 根轨迹法 章
N (s) = D(s)
∏(s + z )
i
m
∏(s + p j )
j =1
i =1 n
自动控制原理第四章

K
*
s p sz
j 1 i 1 m
n
i
j
绘制根轨迹时,只需要使用相角条件。 当需要确定根轨迹上各点的值时,才使用模值条件。
• 知道了根轨迹上的点满足的基本条件, 仍实际上还是不能绘制出根轨迹。
• 要比较快捷的绘制根轨迹,需要找 出根轨迹的一些基本规律。
§4.2 绘制根轨迹的基本规则
渐近线包括两个内容:
渐近线与实轴的夹角和渐近线与实轴的交点。
规则4:渐近线与实轴的交点为
sa
pi z j
i 1 j1
n
m
nm
渐近线与实轴的夹角为
180 0 90 (2k 1)180 a nm 180 ,60 45 ,135 n m 1 nm 2 nm 3 nm 4
第四章 系统的根轨迹法
系统的性能
稳定性
动态性能
闭 环即 特闭 征环 方极 程点 的 根
开环放大倍数 开环积分环节个数
稳态误差
困
难!
困难1:系统闭环特征方程的根如何求取!
困难2:讨论或预测当系统中的某一参数发生
变化时系统闭环特征方程的根如何变 化!
参数改变,系统性能如何改变!
开环传递函数(开环零极点+开环增益)
根轨迹法的任务就是由已知的开环零极点的分布及 根轨迹增益,通过图解法找出闭环极点。 根轨迹是系统所有闭环极点的集合。
闭环极点与开环零、极点之间的关系
闭环零点=前向通道零点+反馈通道极点
闭环极点与开环零点、开环极点及 K* 均有关
开环零极点和根轨迹增益
根轨迹图
闭环极点
分析系统
4、根轨迹方程
自动控制原理第四章根轨迹法(管理PPT)

根轨迹法的优化建议
结合其他方法
将根轨迹法与其他分析方 法(如频率响应法)相结 合,以获得更全面的系统 性能分析。
ቤተ መጻሕፍቲ ባይዱ开发软件工具
开发专门用于根轨迹分析 的软件工具,以提高分析 的效率和准确性。
加强实践应用
在实际工程中加强根轨迹 法的应用,通过实践不断 优化和完善该方法。
05
CATALOGUE
根轨迹法与其他控制方法的比较
根轨迹分析的实例
假设一个开环传递函数为 G(s)H(s) = (s+1)(s+2)/(s^2+2s+5),对其进行 根轨迹分析。
分析根轨迹图,确定系统的稳定性、 动态性能和系统参数的影响。
根据开环传递函数,绘制出根轨迹图 ,并标注出系统的极点和零点。
根据根轨迹图进行系统设计和优化, 例如调整开环传递函数的增益参数, 以改善系统的性能。
对于非线性系统,根轨迹法可能无法给出准确的描述和分析。
04
CATALOGUE
根轨迹法的改进与优化
根轨迹法的局限性与挑战
参数敏感性
根轨迹法对系统参数的微小变化非常敏感,可能导致根轨迹的剧 烈变化,影响系统的稳定性。
无法处理非线性系统
根轨迹法主要适用于线性系统,对于非线性系统的分析存在局限性 。
计算复杂度较高
和设计。
对于具有特定性能指标要求的系统,如 快速响应、低超调量等,可以根据系统 特性和性能要求选择适合的控制方法,
如状态反馈控制器等。
06
CATALOGUE
根轨迹法的实际应用案例
根轨迹法在工业控制系统中的应用
根轨迹法在工业控制系统中广泛应用于系统的分析和设计。通过绘制根轨迹图,可以直观地 了解系统性能的变化,如稳定性、响应速度和超调量等。
《自动控制原理》第4章_根轨迹分析法

因此求分离点和会合点公式: 可以判断是分离点或
N(s)D '(s) N '(s)D(s) 0 会合点,只有满足条
Kg 0
件Kg≥0的是有用解。
例4-1.设系统结构如图, 试绘制其概略根轨迹。
R(s)
k(s 1) c(s)
s(s 2)(s 3)
解:画出 s 平面上的开环零点(-1),开环极点(0, -2,-3)。
逆时针为正。(- , )
m
n
pj (2k 1) ( z j pi ) pj pi
j 1
j 1
ji
m
n
zi (2k 1) ( z j zi ) p j zi
j 1
j 1
j i
k 0,1,
k 0, 1,
例3.设系统开环传递函数为: G(s) Kg(s 1.5)(s 2 j)(s 2 j) s(s 2.5)(s 0.5 j1.5)(s 0.5 j1.5)
K
s1
00
0.5 1
1 1 j1
s2
K
K 2.5
2
K 1
1 K 0
1 j1
2 1
2 1 j 3 1 j 3
1 j 1 j
j
2
1
0
K 0.5
1
2
一、根轨迹的一般概念
开环系统(传递函数)的某一个参数从零变化到 无穷大时,闭环系统特征方程根在 s 平面上的轨迹 称为根轨迹。
根轨迹法:图解法求根轨迹。 借助开环传递函数来求闭环系统根轨迹。
nm
独立的渐近线只有(n-m)条 u=0,1…,(n-m-1)
(2)渐近线与实轴的交点
分子除以分母
自动控制原理_第4章_线性系统的根轨迹法

4.2 绘制根轨迹的依据--根轨迹方程
R(s)
G ( s) H ( s)
C(s)
一、闭环零极点与开环零极点的关系
* KG
* KH d
G( s)
Π ( s z j )
j 1
a
( s pi ) Π i 1
* a
b
* KG A( s)
B( s)
c
H ( s)
Π ( s zl )
K* G( s) s( s 1)(s 2)
试绘制系统的概略根轨迹。 解:开环极点 p1=0, p2=-1, p3=-2,无开环零点。
实轴上的根轨迹 (-∞,-2], [-1,0]。 渐进线 n=3,m=0,有三条渐进线。
0 1 2 1 交点 a nm 3
i 1
pi
1/4<K<∞时,s1,s2为一对共轭复根; K=1/2时,s1,2=-1/2±j0.5。
注意:一组根对应同一个K;K 一变,一组根变;K一停, 一组根停;
K=0.5 K=0 -1
jω
j0.5 0
σ
-j0.5 根轨迹:简称根迹,它是指系统中某一 K=0.1875 K=0.25
参数在可能的取值范围内连续变化时, 闭环系统特征根在s平面上的变化轨迹。
a
pi z j
i 1 j 1
n
m
nm
a
(2k 1) nm
k 0,1,2,, 直到获得(n m)个夹角为止 .
开环传递函数
G ( s) H (s) K * Π ( s z j )
j 1 m
( s pi ) Π i 1
n
K*
《自动控制原理》第4章
率ω的变化称相位频率特性,用υ(ω)表示。 两者统称为频率特
性或幅相频率特性。
第4章 控制系统的频域分析法 对于线性定常系统,也可定义系统的稳态输出量与输入量 的幅值之比为幅频特性;定义输出量与输入量的相位差为相频 特性。 即 幅值频率特性:A(ω )=|G(jω )| 相位频率特性:υ (ω )=∠G(jω ) 将幅值频率特性和相位频率特性两者写在一起, 可得频率 特性或幅相频率特性为
惯性环节的低频渐近线为零分贝线。 ② 再绘制高频渐近线:高频渐近线是指当ω→∞时的L(ω)图 形(一般认为ω1/T)。此时有 -20 dB/dec的斜直线。 , L() 20lg (T 2 2 1 20lg T
因此惯性环节的高频渐近线为在ω=1/T处过零分贝线的、斜率为
第4章 控制系统的频域分析法 ③ 计算交接频率:交接频率是指高、低频渐近线交接处 的频率。高、低频渐近线的幅值均为零时,ω=1/T,因此交接
图4-12 惯性环节的伯德图
第4章 控制系统的频域分析法
图4-13 惯性环节的极坐标图
第4章 控制系统的频域分析法
4.2.5 比例微分环节
传递函数为 频率特性为
G ( s) s 1
G( j ) j 1
对数频率特性为
L( ) 20 lg 2 2 1 ( ) tg 1
② 频率特性的概念对系统、控制元件、部件、控制装置 均适用。 ③ 由频率特性的表达式 G(jω )可知,其包含了系统或元、 部件的全部结构和参数。 ④ 频率特性和微分方程及传递函数一样,也是系统或元 件的动态数学模型。 ⑤ 利用频率特性法可以根据系统的开环频率特性分析闭环 系统的性能。
第4章 控制系统的频域分析法
自动控制原理第4章

幅值条件
s p1 s p2 s pn K s z1 s z2 s zm
注意:1. 这两个条件是从系统闭环特征方程中导出的, 所有满足以上两式的s 值都是系统的特征根,把它们 在s平面上画出,就构成了根轨迹。 2. 观察两式,均与开环零极点有关,也就是说,根 轨迹是利用开环零极点求出闭环极点。
第四章 控制系统的根轨迹分析方法
系统闭环特征方程的根的位置决定闭环系统 的稳定性和动态特性。 l 研究闭环特征根的分布与闭环系统的动态特性 之间的定性、定量关系(分析问题); l 根据控制系统动态特性要求决定闭环极点在根平 面的位置; l 研究调节器参数与闭环特征根的变化关系,设计 调节器(设计问题)。
s1, 2 0.5 0.5 1 4K
(4-1-1)
闭环特征根是K的函数。当K从0~∞变化, 闭环特征根在根平面上形成根轨迹。
K取不同值:
s1, 2 0.5 0.5 1 4K
K G( s) H ( s ) s( s 1)
(等于两个开环极点) K 0, s1 0, s2 1, 1 K , s1 0.5, s2 0.5, (两根重合于-0.5处) 4
● × ● × ﹣1 ﹣0.5 0
Re
例4-1-2 对上述单位反馈的二阶系统,希望闭环系统 的阻尼系数ξ=0.5,确定系统闭环特征根。 解: 根据以前课程,根据阻尼系数求出阻尼角。 阻尼角θ计算如下:
1 tg 3,
2
Im
0.5
3 2
60
s1, 2 j
i 1 m i 1
n
pi )
i
(s z )
l 1800
l 1,3,5
自控第四章

(4-7)
K 式中:
* H
为反馈通道的根轨迹增益。
* * G ( s) H ( s) K G K H
( s z ) ( s z
i 1 q i j 1 l i 1 i i 1
f
l
j
) )
(4-8)
( s p ) ( s p
j
j
K*
( s z ) ( s z
• 闭环特征方程 D(s)=1+G(s)H(s)=0 (4-11) 闭环极点就是闭环特征方程的解,也称为特征 根。 • 根轨迹方程 G(s)H(s)=-1 (4-12) 式中G(s)H(s)是系统开环传递函数,该式明确表 示出开环传递函数与闭环极点的关系。
设开环传递函数有m个零点,n个极点,并假 定n≥m,这时式(4-12)又可以写成:
最后绘制出根轨迹如图4-7所示。
图4-7
例4-3根轨迹
五、根轨迹的渐近线
渐近线与实轴正方向的夹角为
(2k 1) π a nm
渐近线与实轴相交点的坐标为
a
p z
i 1 i j 1
n
m
j
nm
例4-4 已知系统的开环传递函数
K * ( s 1) G ( s) H ( s) s ( s 4)( s 2 2 s 2)
•根轨迹法可以在已知开环零、极点时,迅速求
出开环增益(或其他参数)从零变到无穷时闭环 特征方程所有根在复平面上的分布,即根轨迹。
4-2 绘制根轨迹的基本法则 一、根轨迹的分支数
分支数=开环极点数 =开环特征方程的阶数
即为max(n,m)条。
二、根轨迹的连续性与对称性 根轨迹是连续曲线,对称于实轴
自动控制原理-第四章-根轨迹

snm 1 p1 1 pn
s
s
0
s z1 s zm
1 z1 1 zm
s
s
s pi i 1, 2, n
K*
s p1 s pn
snm 1 p1 1 pn
s
s
s z1 s zm
1 z1 1 zm
s(0.5s 1) s(s 2)
通过系统的根轨迹图,可以很方便地对系统的动态性能和稳态性能进行 分析。不足之处是用直接解闭环特征方程根的办法,来绘出系统的根轨 迹图,这对高阶系统将是很繁重的和不现实的。
为了解决这个问题,依据反馈系统中开环、闭环传递函数的确定关系,通过开环传递函 数直接寻找闭环根轨迹正是我们下面要研究的内容。
① (s1 p2 ) 、(s1 p3 ) 两向量对称于实轴,引起的相角大小 相等、方向相反; (s1 z2 ) 、(s1 z3 ) 两向量也对称于实轴,引起的相角大 小相等、方向相反;
∴ 判断 s1是否落在根轨迹上,共轭零、极点不考虑。
② 位于s1左边的实数零、极点:(s1 z1) 、(s1 p4) 向量引起的相
GK
(s)
kg s(s 1)
解:判断某点是否在根轨迹上,应使用相角条件。求某点对应的根轨迹增益值,应使用 幅值条件。
s1 : m (s zi ) n (s p j ) 0 (s1 p1) (s1 p2 )
i 1
j 1
s1 (s1 1) 135 90 225
s2: 0 (s2 p1) (s2 p2) (116.6 ) (63.4 ) 180
自动控制原理第四章

基本要求
1.正确理解开环零、极点和闭环零、极点等概念。 2.正确理解和熟记根轨迹方程(模方程及相角方程)。熟练
运用模方程计算根轨迹上任一点的根轨迹增益和开环增益。 3.正确理解根轨迹法则,对法则的证明只需一般了解,熟
练运用根轨迹法则按步骤绘制反馈系统开环增益K从零变
化到正无穷时的闭环根轨迹。
4
4-1 根轨迹与根轨迹方程
一、根轨迹的分支数 分支数=开环极点数 =开环特征方程的阶数
二、根轨迹对称于实轴 闭环极点为 实数→在实轴上 复数→共轭→对称于实轴
14
三、根轨迹的起点与终点
起于开环极点,终于开环零点。
由根轨迹方程有:
m
i1 n
(s (s
zi ) pi )
1 K*
i 1
起点 K * 0 → s pi 0 → s pi
① 有4条根轨迹。
② 各条根轨迹分别起于开环极点(0),(-3), (-1+j1),( -1-j1) ;终于无穷远。
③ 实轴上的根轨迹在0到-3之间。
④ 渐近线
a
(2k
1) π 4
450 , 1350
a
0 3 1 j11 4
j1
1.25
36
⑤ 确定分离点d
4 1 0
试绘制系统概略根轨迹。
23
解:
① n=2,有两条根轨迹。 ② 两条根轨迹分别起始于开环极点 (-1-j2), (-1+j2) ,终于开环零点 (-2-j) ,(-2+j) ③ 确定起始角、终止角。 如图4-13所示。
24
例4-5根轨迹的起始角和终止角
图4-13
自动控制原理第4章
z2 ) p2 )
m
sm z j n1
i 1
(s zm )
(s pn )
m
(zj)
j 1
n
( pi )
i 1
自动控制原理
第四章 复域分析法-根轨迹法
如果开环零、极点的数目满足n-m 2,则 闭环特征方程为
snnp isn 1 n( p i)K *m( zj) 0
证明:系统的闭环特征方程
n
m
D(s) (spi)K* (szj)0
i1
j1
根轨迹有分离点,说明闭环特征方程有重
根。因此,
n
m
(s pi ) K* (s zj ) 0
i1
j1
d
ds
n i1
(s
pi )
K*
m j1
(s zj )
0
自动控制原理
第四章 复域分析法-根轨迹法
将上面两式相除,整理得
自动控制原理
第四章 复域分析法-根轨迹法
4.1 根轨迹的基本概念
一、根轨迹的定义
根轨迹:是指系统开环传递函数中某个参数 (如开环增益K)从零变到无穷时,闭环特征 根在s平面上移动所画出的轨迹。
常规根轨迹:当变化的参数为开环增益时 所对应的根轨迹。
广义根轨迹:当变化的参数为开环传递函 数中其它参数时所对应的根轨迹。
自动控制原理
第四章 复域分析法-根轨迹法
证明: 由根轨迹方程,得
m
(s
j 1
n
(s
zj) pi )
1 K*
i1
令K* =0,得
m
j 1 n
(s (s
zj) pi )
1 K*
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
G(s)H(s) s2 5s 5 s(s 1)(s 2 2s 2)
2020/2/18
自动控制原理实验教程
(2)绘制控制系统的根轨迹图并分析根轨迹的一般规律 MATLAB提供rlocus ( ) 函数来绘制系统的根轨迹图, 其调用格式为:
-4
-6
-5
-4
-3
-2
-1
0
1
2
Real Axis
2020/2/18
自动控制原理实验教程
(3)根据控制系统的根轨迹,分析控制系统的性能。 【自我实践4-1】在实验内容(2)中控制系统的根轨迹上 分区段取点,构造闭环系统传递函数,分别绘制其对应系 统的阶跃响应曲线,并比较分析。将数据填入实验数据记 录表4-1中。
2
System: sys
Gain: 14.3
Pole: -3.56
1
Damping: 1
Overshoot (%): 0
Frequency (rad/sec): 3.56
0
-1
-2
-3
Root Locus
System: sys Gain: 0.385
Pole: -0.423 - 0.0125i Damping: 1
标记,在MATLAB窗口上即得到该点的根轨迹开环增益k值 和对应的所有闭环根r(列向量)。
2020/2/18
自动控制原理实验教程
【范例4-2】若已知系统开环传递函数,绘制控制系统的根 轨迹图,并分析根轨迹的一般规律。
G(s)H(s)
k
s(s 1)(s 2)
Imaginary Axis
4
3
2020/2/18
自动控制原理实验教程
3. 实验内容
(1)绘制系统的零极点图 MATLAB提供pzmap( ) 函数来绘制系统的零极点分布图, 其调用格式为: pzmap ( num , den ) 或 [ p , z ] = pzmap ( num , den ) 直接在s复平面上绘制系统对应的零极点位置,极点用 “×”表示,零点用“○”表示。
Overshoot (%): 0 Frequency (rad/sec): 0.423
System: sys Gain: 5.92 Pole: -0.00184 + 1.41i Damping: 0.00131 Overshoot (%): 99.6 Frequency (rad/sec): 1.41
2020/2/18
自动控制原理实验教程
6. 实验能力要求 (1)熟练掌握使用MATLAB绘制控制系统零极点图和根 轨迹图的方法。 (2)通过根轨迹图能够确定有用的参数,比如:分离点 坐标及相应参数、临界开环增益点及相应参数、任意一点
对应的开环增益K值和闭环极点r向量。
(3)利用根轨迹图进行系统性能分析,以阻尼比为依据 分区段比较不同闭环极点对应系统性能的变化。能够确定 系统稳定的开环增益范围。 (4)了解闭环零、极点对系统性能的影响。
rlocus ( num , den )
% 直接在s复平面上绘制系统的根轨迹图。
[ k, r ] = rlocfind (num, den)
% 在作好的根轨迹图上,确定被选的闭环极点位置的增益值k和此 时闭环极点r(向量)的值。
在作出根轨迹图后,再执行该命令,命令窗口出现提示语, “Select a point in the graphics windows”,此时请 将鼠标移至根轨迹图并选定位置,单击左键确定,出现“+”
2020/2/18
自动控制原理实验教程
4.1 基于MATLAB控制系统的根轨迹及其性能分析
2)运动形式。如果闭环系统无零点,且闭环极点为实 数极点,则时间响应一定是单调的;如果闭环极点均为 复数极点,则时间响应一般是振荡的。 3)超调量。超调量主要取决于闭环复数主导极点的衰 减率,并与其它闭环零、极点接近坐标原点的程度有关。 4)调节时间。调节时间主要取决于最靠近虚轴的闭环 复数极点的实部绝对值;如果实数极点距虚轴最近,并 且它附近没有实数零点,则调节时间主要取决于该实数 极点的模值。 5)实数零、极点影响。零点减小闭环系统的阻尼,从 而使系统的峰值时间提前,超调量增大;极点增大闭环 系统的阻尼,使系统的峰值时间滞后,超调量减小。而 且这种影响将其接近坐标原点的程度而加强。
2020/2 基于SISO设计工具的系统根轨迹设计
1. 实验目的 (1)熟练使用根轨迹设计工具SISO。 (2)掌握用根轨迹法进行系统校正过程中,补偿增益和附 加实数(或复数)零极点之间匹配的规律。 (3)利用根轨迹进行分析,并用时域响应来验证设计的正 确性。 2. 实验原理
第4章 线性系统的根轨迹法
4.1 基于MATLAB控制系统的根轨迹及其性能分析
1. 实验目的 (1)熟练掌握使用MATLAB绘制控制系统零极点图和 根轨迹图的方法。 (2)学会分析控制系统根轨迹的一般规律。 (3)利用根轨迹图进行系统性能分析。 (4)研究闭环零、极点对系统性能的影响。
2020/2/18
自动控制原理实验教程
4.1 基于MATLAB控制系统的根轨迹及其性能分析
2. 实验原理 (1)根轨迹与稳定性 当系统开环增益从变化时,若根轨迹不会越过虚轴进入s 右半平面,那么系统对所有的K值都是稳定的;若根轨 迹越过虚轴进入s右半平面,那么根轨迹与虚轴交点处的 K值,就是临界开环增益。应用根轨迹法,可以迅速确 定系统在某一开环增益或某一参数下的闭环零、极点位 置,从而得到相应的闭环传递函数。 (2)根轨迹与系统性能的定性分析 1)稳定性。如果闭环极点全部位于s左半平面,则系统 一定是稳定的,即稳定性只与闭环极点的位置有关,而 与闭环零点位置无关。
System: sys Gain: 1.64
Pole: -0.268 - 0.77i Damping: 0.328
Overshoot (%): 33.6 Frequency (rad/sec): 0.815
System: sys Gain: 0.366 Pole: -0.322 Damping: 1 Overshoot (%): 0 Frequency (rad/sec): 0.322