EM253
em253随机mf亮红灯问题

em253随机mf亮红灯问题
以下两个cpu都只带了em253模块,没有挂其他模块。
一个cpu是224,带了3个em253.
一个cpu是226,带了4个em253.(本来看手册想带5个的,实际接上的时候,后面几路马上mf就会亮红灯。
编程软件在线也就找不到这几个亮红灯的253模块了。
)现在情况是这样的。
在都不发脉冲工作的情况下,只是待机状态。
224的这个,上电后一般都正常,但有时运行一会儿后最后一个253mf会亮红灯;有时不是最后一个,而是第二个253mf亮红灯。
没有规律,随机的。
重新断电上电后,又能维持一段时间。
维持一段时间后,又随机亮红灯。
226的这个,和224的情况差不多,第一个模块一般mf 不会亮红灯,就是后面几个,有时是连着几个都亮红灯,有时是中间一个亮红灯。
重新断电上电后,又能维持一段时间。
维持一段时间后,又随机亮红灯。
em253和cpu都是用开关电源供电,所以应该不存在供电不足现象。
怀疑是不是s7-200总线负载能力有限造成的。
但是他有时又可以?
公司定了很多253模块回来,所以就来回换253模块,
有几个253按上述接法接上后,很长时间都不会mf亮红灯,难道这是传说中的个体差异造成的?必须是253中的极品才能在这个模式下正常工作啊?
求达达解答。
问题补充:
问题的关键是,一旦mf亮红灯,在编程软件里就没办法看见这个模块了,又怎么进到模块错误诊断界面去看错误代码,以此知道错误原因呢?
最佳答案
还要看一下cpu模块总线电源的能力够不够带这几个模块。
西门子EM253控制SINAMICS V80做定位运动控制

西门子EM253控制SINAMICS V80做定位运动控制作者:肖锡清尤晨张立来源:《中国高新技术企业》2013年第19期摘要:在饮料包装中,贴标、喷码后的产品需要由单道输送变为多道输送,进入装箱工位。
由于各种产品直径不同,在单道变多道的分道过程中,为保证分瓶机能适应各种瓶型并能精确定位,我们采用EM253控制SINAMICS V80伺服做定位运动控制。
关键词:饮料包装;西门子;分道定位;定位运动控制中图分类号:TP23 文献标识码:A 文章编号:1009-2374(2013)28-0070-021 SINAMICS V80的介绍SINAMICS V80伺服驱动系统是西门子专为小型简易机械开发的经济型伺服驱动产品。
SINAMICS V80伺服驱动系统价格经济,设定简易便捷,无需参数化的配置方式,可与SIMATIC S7-200系列PLC组成简单的运动控制系统。
SINAMICS V80伺服驱动系统包括伺服驱动器和伺服电机两部分,伺服驱动器总是与其对应的同等功率伺服电机一起配套使用。
SINAMICS V80 伺服驱动器通过脉冲输入接口来接受从上位控制器发来的脉冲序列,进行速度和位置的控制,通过数字量接口信号来完成驱动器运行的控制和实时状态的输出。
图1 V80伺服驱动器接口图通过“指令脉冲设置(PULSE)”旋转开关,可以设定驱动器的指令脉冲分辨率、指令脉冲连接方式和指令脉冲类型。
与SINAMICS V80 驱动器相匹配的伺服电机有4种,功率分别是100W、200W、400W和750W,每种电机都有带抱闸和不带抱闸两款。
电机类型为永磁同步电机,采用自然风冷方式,电机表面无涂漆,电机输出轴带键槽。
2 EM253的技术特点S7-200 EM253定位模块用来对单轴步进电机进行开环速度、位置控制,无法实现闭环控制;提供从12Hz到200kHz的脉冲输出频率;控制系统的测量单位可以采用脉冲数,也可以采用工程单位(如:英尺、厘米);具有绝对方式、相对方式和手动方式三种工作模式;提供连续的位置控制工程,最多可以支持25个位置点的控制,每段运动轨迹包络最多可以有4种运动速度;提供螺距补偿功能;提供4种不同归零模式。
s7200 EM253 EM241

¨ 脉冲和方向输出标签可用来指定控制方向的方式 您必须首生指定输出的 极性
选择正极性 对于使用正极性的应用 选择下列方式之一 见图 9-3 以配合您的驱动以及 移动的方位 ¨ 位控模块从 P0 发出正转脉冲 从 P1 发出反转脉冲
时间 缺省值=1000ms ¨ DECEL_TIME 电机从 MAX_SPEED 减速到 SS_SPEED 所需要的时间 缺省值=1000ms
用脉冲数 ¨ 提供可组态的 backlash 补偿 ¨ 支持绝对 相对和手动的位控方式 ¨ 提供连续操作 ¨ 提供多达 25 组的移动包络 Profile 每组最多可有 4 种速度 ¨ 提供 4 种不同的参考点寻找模式 每种模式都可对起始的寻找方向和最终
的接近方向进行选择 ¨ 提供可拆御的现场接线端子便于安装和拆御
9-5
/bbs/
创建模块程序 第九章
¨ 位控模块从 P0 发脉冲 正转时 模块接通 P1 输出 反转时关断 P1 输出 这是缺省设置
图 9-3 正极性的转向选项 选择负极性
对于使用负极性的应用 选择下列方式之一 见图 9-4 以配合您的驱动和移 动的方位 ¨ 位控模块从 P0 发出反转脉冲 从 P1 发出正转脉冲 ¨ 位控模块从 P0 发脉冲 正转时断开 P1 输出 反转时接通 P1 输出
位控向导提供一个高级选项 利用这个选项 您可以对位控模块的输入和输出 的缺省组态进行查看和编辑
¨ 输入激活等级标签可改变激活的等级设置 等级设为高时 当输入有电流 时 读到逻辑 1 等级设为低 当输入无电流时 读到逻辑 1 逻辑 1 总 是解释为条件激活 不论激活等级是怎样的 缺省=active high 输入有 电流时 LED 灯亮
利用modbus协议实现对S7
利用modbus协议实现对S7利用S7-200实现对4台步进电机的位置控制,其中的两台是用EM253控制的,另两台是用PLC自有的Q0.0和Q0.1来实现的。
在控制室有一台PC机,利用MODBUS协议实现与现场PLC200的通讯(PC机做主站,PLC做从站),现场也有一些按钮开关能实现各个电机的前后移动。
上位PC 机能实现距离的精确定位!当在现场让EM253控制的那两台电机运行起来后,如果上位机在这两台电机运行期间发出任何的读写从站(下位PLC)的命令,都会导致电机的停转!这显然不是我所需要的!请问是什么原因?有哪位碰到过?说到底就是感觉modbus协议好像在干扰EM253!V存储区是没有什么问题的,电机在没有上位机的MODBUS读写命令时也是正常的!问题补充:1.只是通过功能2读取输出数字量的状态,此时并没有发送电机的控制命令,这时开关量状态是读回来了,但电机还是停止了!V变量区也没有重叠的地方!2.在交叉表中的确看到一些L变量在EM253和MOdbus 协议功能都用到的变量,但感觉这也没多大关系啊!毕竟每个函数独有自己的临时局部变量区啊!3.在交叉引用表中还发现Modbus_slave功能块与IB0(输入字节)和QB0(输出字节)有联系,而实际上只是调用了它,没有编写与它相关的语句啊!不知是怎么原因!请分析下!4.有什么简单的方法查看EM253配置时占用的V区空间啊?5.系统中有两个EM253模块,其中最右边的那个在重新PLC上电后回出现MG灯闪的情况(表明配置有错误,而再将以前的配置和程序下载到CPU中后就正常了。
再次断电-通电后又是这样的闪的情况,不知是不是EM253坏了?最佳答案1、检查与上位机交互的数据里面,有没有对电机控制位的误操作;2、modbus库函数需要一定的V存储器作为运算区,检查一下是否有与电机控制重复使用的情况;3、再编译一下程序,在交叉引用中看看被modbus库函数调用的变量中有没有与电机控制相关的,modbus库函数编译后会生成中断程序,并自动调用一些L、SM以及根据参数设定调用I、Q、M点。
定位模板EM253快速入门(可编辑)
定位模板EM 253快速入门定位模板 EM 253 快速入门 V1.0 SLC A&D CS Beijing定位模板 EM 253 快速入门V1.0SLC A&D CS BeijingJanuary 2005Page 1 of 49 定位模板 EM 253 快速入门 V1.0 SLC A&D CS Beijing:EM 253SIMATIC S7 ? 200 系SIMATICS7 200 9 EM 253? 第。
EM 253板 EM 253 模 STEP 7-MicroWIN 软目录1? 模块概述. 51.1? 模块特点概述61.2? S7-200?CPU 附加的定位模块EM?253 个数61.3? 定位模块 M?253 E 订货号72? 调试定位模板?EM?253 基本思路73? 准备工作. 84? 定位模板?EM?253 输入、输出点说明. 85? 定位模板?EM?253 的安装和接线95.1? 定位模板EM?253 内部的输入、输出点接线图. 9Page 2 of 49件操作的基础知识。
板的使用者, 应该具有定位模可以起到帮助入门的作用。
的用户, ,希望对初次使用定位模板该文档的理解章,进一步加深对定位模板系统手册》档掌握了初步调试和使用模板的方法以后 ,还是要认真、仔细阅读《过此文统手册》。
建议:用户通等等。
但是, 该文档无法取代《经验,内容包括一些调试的步骤, 使用的用户。
主要面对初次使用定位模板该文档编者注定位模板 EM 253 快速入门 V1.0 SLC A&D CS Beijing5.2? 连结定位模板EM?253 与 SIMATIC?FM?S EP? T D V E 的接图线. 105.3? 连结 SIMATIC?FM?S TE?P D RIVE? 到S O S T P E 的接线图 115.4? 连结定位模板EM?253 与I N D SU TRIAL? D EVCIES? C ORP的接线图 125.5? 连结定位模板EM?253 与日本、中国标准驱动器(O R I EN TAL? M OTORUPK?S T ANDARD 接) 线图 135.6? 连结定位模板EM?253 与P AREK R /C OM PUMOTOR? M?750? EO 接线图 146? 应用“POSTION?C I ONTROL?WIZARD”配置定位模板?E M 2? 35. 146.1? 打开“P OSITI ON? C ONTR OL? W I ZAR D ”配置工具156.2? 选择用于 7S ?20 0 P? CL 的位置控制模式 ;. 156.3? 输入定位模板EM?253 的逻辑位置. 156.4? 输入系统的测量单位(“工程量”或者“脉冲数/转”)166.5? 编辑输入、输出点配置166.6? 定义模板输入信号 LMT+、LMT-?、STP 的功能. 176.7? 定义电机的速度1 76.8? 定义手动操作的参数设置 186.9? 加、减速度的时间参数设置. 196.10? 设置运动位置拐点参数196.11? 设置模板的找寻原点位置参数206.12? 设置定位模板EM?253 的运动轨迹包络 22Page 3 of 49IMRI 定位模板 EM 253 快速入门 V1.0 SLC A&D CS Beijing6.13? 完成组态 247? 应用定位模板?EM?253?调试界面 257.1? 操作定位模板EM?253,显示运动状态. 257.2? 显示、修改定位模板M?253 E 的配置运动控制参数. 287.3? 诊断定位模板EM?253 的错误信息. 298? 程序编制 308.1? 基本介绍 308.2? 功能子程序.328. 2.1? POSx_CTRL. 328. 2.2? POSx_MAN338.2.3? POSx_GOTO. 358. 2.4? POSx_RUN378. 2.5? POSx_RSEEK 388. 2.6? POSx_LDOFF 398. 2.7? POSx_LDPOS 418. 2.8? POSx_SRATE 428. 2.9? POSx_DIS438. 2.10? POSx_CLR 438. 2.11? POSx_CFG 44Page 4 of 49 定位模板 EM 253 快速入门 V1.0 SLC A&D CS Beijing9? 错误诊断 459.1? 定位模板EM?253“LED”状态指示灯459.2? 操作错误评估. 469.3? 模板错误评估. 481 模块概述图 1 : EM 253 模板Page 5 of 49 定位模板 EM 253 快速入门 V1.0 SLC A&D CS Beijing定 EM 253 “ 5 STP; RPS ,关; ZP LMT+ LMT-置 6 ( 4 个 DIS , CLR , P0 , P1 P0+ 、P0- , P1+ 、 P1- S7-200 PLC现 S7-200 PLCCPU定 EM 253 应。
第1讲_S7-200PLC的基础知识
1.3.2软元件介绍
输入继电器I 输出继电器Q
通用辅助继电器M 特殊继电器SM 定时器T
PLC用户数据存储器编程资源
S7-200软元件列表(12个)
变量存储器V 局部变量存储器L
顺序控制继电器S 模拟量输入/输映像寄存 器AI、AQ 高速计数器HC
计数器C
累加器AC
25
一、输入继电器I(Input Relay)
定义掉电保持存储器的个数:一次最多可以定义六个掉电保持区. 可定义掉电保持的存储单元:V、M、T、C
11
开机后数据的恢复 开机后,S7-200从EEPROM 中恢复程序块和系统块;同时, CPU检查RAM存储器,确认 超级电容器是否成功保存了 RAM存储器中的数据,若成 功保存,则RAM存储器保持 区域将保持不变。 V存储器中的保持区和非保持区,从 EEPROM中的相应区域恢复。若 RAM存储器的内容没有保持,CPU 会清除RAM存储器(包括保持区和 非保持区),并在上电后的第一个 扫描周期置保持数据丢失标志位 (SM0.2)为“1”,将EEPROM中 的数据恢复到RAM中。
21
编址举例: • 例如:某一控制系统选用CPU224,系统所需的输入 输出点数各为: 数字量输 入24点、数字量输出20点、 模拟量输入6点和模拟量输出2点。
①连接模块
0
主机 CPU224 模块 EM221 DI8 DC24V
1
模块 EM222 DO8 DC24V
2
模块 EM235 AI4/AQ1
• 通用辅助继电器(M):也是一位存储器,但是它不与输入 点对应,也不与输出点相对应,它用来存储PLC内部的中间 变量,相当于继电器控制系统中的中间继电器。 • 辅助继电器的线圈、常开触点、常闭触点:在梯形图上的图 形符号与I/O继电器相同,只是标号字母名称不同。通用辅 助继电器的线圈和触点的关系和输出继电器的一样,但只有
西门子 运动模块253介绍

“使能DIS输出”,使“DIS”输出LED灯常亮;然后,再调试设置的运动参数、运动轨迹包
络,等等;
▲ 按照用户的工艺,编制用户程序。下载用户程序到S7-200 PLC;
▲ 调试用户程序;
▲ 结束。
★ 准备工作
带有STEP 7 Micro/WIN 软件的编程设备,软件版本V4.3 以上;
2ED10–0HA0);
一台步进电机(如:SIMOSTEP 1FL3042,4Nm,2.0A(订货号为
1FL3042-0AC31-0BK0);
三个行程开关或者接近开关(根据模板接线的不同,接近开关可以选择源型, 或者漏型输入
类型)。分别作为:硬件左极限位置开关、硬件右极限位置开关和参考点开关。
提供螺距补偿功能;
多种工作模式。绝对方式、相对方式、手动方式;
提供连续的位置控制工程。最多可以支持25 个位置点的控制。每段运动轨迹包络,可
以有最多4 种不同的速度实现;提供4 种不同寻找参考点的方式;
便捷安装、拆卸的端子连接器。
★ S7-200 CPU 附加的定位模块EM 253 个数
制。通过S7-200 PLC 的扩展接口,实现与CPU 间通讯控制。
定位模板EM 253 应用于位置控制的过程,实现起来非常简单。STEP 7-Micro/Win 提
供了一个定位模板EM 253 配置的向导操作(位置控制向导) ,可以在很短的几分钟时间内
完成配置操作,存储在S7-200 PLC 的V 区内;同时,STEP 7-Micro/Win 还提供了一个界
▲ 确保S7-200 PLC 运行状态由STOP 到RUN ,再由RUN 到STOP。完成模板的自检、初
第09章_S7-200 PLC的扩展功能
图9-9 系统测量单位配置对话框
• 单击“下一步”按钮,采用默认配置名称,完成向导的配 置,则系统自动生成了11个子程序,如表9-2所示。每一 个子程序,都是以“POSx_”作为名称前缀,这里的“x” 表示模板的位置。
表9-2 用于定位模板EM253运动控制功能的子程序
序号 名称 用途
1
2
POSx_CTRL
9.3.1 使用向导配置定位模块EM253
• 启动STEP 7 Micro/Win软件,单击“工具”菜单“位 置控制向导…”打开位置控制向导,选择“配置 EM253位控模块操作”,单击“下一步”按钮,进入 “EM253位控模块配置”的模块位置对话框。单击 “下一步”按钮,进入系统测量单位配置对话框,如 图9-9所示。 • 单击图9-9“下一步”按钮,进入“定义模板输入信号 LMT+、LMT-、STP功能”对话框。 • 单击“下一步”按钮,进入“定义电机速度”对话框 • 单击“下一步”按钮,进入“手动参数设置”对话框 • 单击“下一步”按钮,进入“加减速时间参数设置” 对话框
实数
实数 实数 实数
1.0
16.0 0.0 9.0
0.5
0.0 1.0 10.0
茶匙
盎司 大汤匙 分钟
表9-1 饼干配方集中的不同配方举例
图9-1 “配方数据域定义”对话框
图9-2 “创建和编辑配方”对话 框
单击图9-2“下一步”按钮,进入“分配存储区”对 话框,选择“建议地址”即可。编写的程序清单及 注释如图9-3所示。
图9-18 POSx_DIS子程序
(10)POSx_CLR子程序
• 该命令使定位模板EM253在 CLR输出端子上产生一个50毫 秒的脉冲,如图9-19所示。 • 编程使用时,需借助判断 CTRL命令输出参数“Done” 的状态,确保模板在没有执行 任何其他运动控制之前,启动 CLR命令。
PLC控制伺服电机如何准确定位
设计与实施
• 以对传输带的定位控制设计为例加以说明。现需要用传输带 运送货物,从货物运送起点到指定位置(终点)的距离为10 cm。 现要求当传输带上的货物运行10 cm后,传输带电机停止运行。 该系统硬件设置主要包括西门子S7-200CPU226型PLC、传输带 电机(三相交流异步电机)、OMRON的E6A2-CW5W光电旋转编 码器、松下VFO系列BFV00042GK变频器等。该系统的工作原 理是将光电编码器的机械轴和传动辊(由三相交流异步电机拖动) 同轴相连,通过传动辊带动光电编码器机械轴转动,输出脉冲信 号,利用PLC的高速计数器指令对编码器产生的脉冲(采用A相脉 冲)个数进行计数,当高速计数器的当前值等于预置值时产生中 断,经变频器控制电动机停止运行,从而实现传输带运行距离的 准确定位控制。很显然,该控制系统中实现准确定位控制的关键 是对PLC的高速计数器的预置值进行设置,高速计数器的预置值 即为传输带运行10 cm时光电编码器产生的脉冲数。该脉冲数值 与传输带运行距离、光电编码器的每转脉冲数以及传动辊直径等 参数有关。该脉冲数可以通过实验测量也可通过计算得出。计算 得出传输带运行10 cm对应的脉冲数为:
利用PLC的EM253模块实 现的准确定位
• EM253位控模块是S7-200的特殊功能模块,它能够产生脉 冲串,用于步进电机和伺服电机的速度和位置开环控制。它与 S7-200系列PLC通过扩展的I/O总线通讯。它带有八个数字输出, 在I/O的组态中作为智能模块,可提供单轴、开环移动控制所需 要的功能和性能。提供高速控制,12~200 000脉冲/s。 STEP7-Micro/WIN为位置控制模块的组态和编程提供了位置控 制向导,可以生成组态/包络表和位置控制指令,配置EM253的 运动参数、运动轨迹包络等。
【干货】em253指令说明

【干货】em253指令说明位置控制指令说明(相同的输入输出不重复说明)位置控制使能指令POS0_CTRL Done 指令执行完成位数据类型 BOOL 布尔型需填写一个位Error错误代码数据类型BYTE 字节需填写一个字节C_POS当前位置(指脉冲位置)数据类型 DINT 双整数需填写一个双字C_Speed 当前速度数据类型DINT 双整数需填写一个双字(当前运行的速度单位是脉冲数/秒)C_Dir当前脉冲方向数据类型 BOOL 布尔型需填写一个位自动指令POS0_GOTO POS运行脉冲数数据类型 DINT 双整数需填写一个双字如果为相对位置控制,则POS为所需发送的脉冲数量如果为绝对位置控制,则POS为所需达到的脉冲坐标点Speed运行速度数据类型DINT 双整数需填写一个双字(单位是脉冲数/秒)Mode动作模式数据类型 BYTE 字节需填写一个字节 2跟3号模式慎用0相对位置控制模式1绝对位置控制模式2正向一直跑3反向一直跑Abort停止信号数据类型BOOL 布尔型需填写一个位位置控制手动指令POS0_MAN EN使能输入RUN手动动作信号JOG_P正向点动JOG_N反向点动这4个输入端子都是接触点点动的运行速度在向导中设置位置控制回原点指令POS0_RSEEK EN使能输入START回原点信号输入端位置控制包络指令POS0_RUN Profile包络号数据类型 BYTE 字节需填写一个字节当需要发送包络脉冲时,所选择发送的包络编号,每次只能发送一个包络的脉冲Abort停止信号数据类型 BOOL 布尔型需填写一个位C_profile当前正在发送的脉冲包络号数据类型 BYTE 字节需填写一个字节C_Step当前发送包络中的哪一步数据类型BYTE 字节需填写一个字节每个包络中至少有1步最多有4步位置控制偏移量设定指令指令功能是设定脉冲原点用于使用绝对脉冲建立坐标原点时使用注意⑴原点位置与RPS参考点可以不是同一个点⑵手动指令MAN与自动指令GOTO之间的动作信号需要做互锁。
S7-200PLC系统组成

S7-200PLC系统组成S7-200系列是西门子开发的一种可编程序逻辑控制器(PLC),由CPU 和扩展模块组成,它能够控制各种设备以满足自动化控制需求。
1.CPUCPU本体上包括了:Rs485通讯口:用于通讯扩展卡插槽:三选一:电池卡,存储卡和电池时钟卡。
状态灯:有运行,停止和故障/强制三个LED灯输入/输出端子:可拆卸,用于接线数字量输入/输出状态灯:每个数字量输入/输出点对应一个LED灯,用于指示该IO点状态电源端子:24VDC或220AC可选24VDC电源输出端子:可输出一个24VDC电源,但容量较小,不同型号CPU从180mA-400mA不等状态拨码:可切换CPU运行或停止状态扩展模块接口:用于连接下一个扩展模块模拟电位计:有两个。
通过旋转电位计,可在CPU内部产生一个0-255的数2.扩展模块S7-200扩展模块非常丰富,主要有数字量模块,模拟量模块,运动控制模块和通讯模块。
2.1数字量模块数字量模块分为:数字量输入模块EM221,数字量输出模块EM222和数字量输入/输出模块EM223。
数字量模块有各种点数可选,如16点输入,8点输出,32输入/32输出等等,可根据实际需要选择。
对于输入模块,分为24VDC输入和120/230VAC输入;输岀模块分为晶体管输岀,继电器输岀和可控硅输岀。
在选型的时候,除了要计算数字量输入输出的点数以外,还要分清楚输入输出的类型。
2.2模拟量模块模拟量模块分为:模拟量输入模块EM231,模拟量输岀模块EM232,模拟量输入输岀模块EM235,其中模拟量输入模块包含了普通模拟量模块(电流/压),热电阻模块和热电偶模块。
同数字量模块,模拟量模块有各种点数可选,如4点输入,2点输出,4点输入/1点输出等等,可根据实际需要选择。
按模拟量信号类型分,分为电流,电压,热电阻(输入)和热电偶(输入)。
在选型的时候,除了要计算模拟量输入输出的点数以外,还要分清楚输入输出信号类型。
定位模块EM253详细技术参数

定位模块EM253一、选型型号用于位置定位控制的模块。
其输出信号位控功能的逻辑控制信号,不能直接直接驱动现场任何执行控制器件。
二、定位模块EM253功能简介:EM253位控模块,速度与精度的完美协调使用简单、控制精确EM 253的控制范围从微型步进电机到智能伺服驱动器。
运行快速而不受约束•集成的脉冲接口能够产生200KHz的脉冲信号,指定位置,速度和方向。
•集成的定位开关输入能够脱离中央处理单元独立地完成位控任务。
适应性强•5V直流脉冲或RS422输入接口。
低震荡•可以选择的“jerk”/S-curve功能可以减小在启动,停止和改变速度时产生的震荡和后座。
控制灵活,功能强大•通过用户程序可以配置和选择25个profile,每个profile可以有多达四个速度改变。
•绝对、相对和手动的定位;可以将距离和位置的单位设置为毫米,英寸,度或者脉冲数。
•可以选择4种不同的参考点搜索模式。
简便的软件配置,图形化的、集成于STEP 7-Micro/WIN,V 3.2(及以上版本)的向导具有以下功能:•参数化(基本参数的设定)•创建定位profile•确定参考点搜索模式•集成于Micro/Win中的操作简便的EM253控制面板支持参数的在线修改和参数化功能。
三、定位模块EM253技术规范1、通用规范2、输入特性3、输出特性注:1、根据脉冲接收装置和电缆,加装一个外部上拉电阻,可改善脉冲信号的质量和抗扰性。
2、运行5VDC以上的漏极开路输出,将使射频辐射超过允许的限制。
可能需要对系统或布线采取射频辐射防护措施。
四、定位模块EM253与S-200 PLC的兼容性定位模块EM253可以与各种不同类型的S7-200 CPU(222、224、226 和226XM)相连接:五、定位模块EM253模块LED状态表六、定位模块EM253模块各种接线图1、EM 253位控模块输入和输出的内部示意图2、EM 253位控模块与SIMATIC FM步进驱动的连接3、EM 253位控模块与工业设备公司(下一个步进)的连接4、 EM 253位控模块与定向马达UPK标准的连接5、EM 253位控模块与Parker/Compumotor OEM 750的连接七、定位模块EM253模块组态系统简单范例。
S7-200硬件及技术参 S7-200扩展模块介绍

S7-200硬件及技术参S7-200扩展模块介绍主要内容:1、I/O模块介绍2、智能模块介绍(1)数字量模块数字量扩展模块:S7-200PLC系列提供以下数字量输入输出扩展模块。
EM221:数字量输入模块,8/16点输入EM222:数字量输出模块,4/8点输出EM223:数字量输入/输出模块,4输入/4输出,8输入/8输出,16输入/16输出,32输入/32输出(2)数字量输入接线EM22124VDC输入的模块可以接成漏型或是源型,只要每一组接成一样就行,输入点可以分组接不同的电源,这些电源之间没有联系也可以。
漏型输入:对应的输入器件为PNP型,高电平有效,共阴极,电流向输入点流入;源型输入:对应的输入器件为PN型,低电平有效,共阳极,电流从输入点流出。
另外,8点输入分为直流和交流模块,交流模块可以接交流输入,EM221的接线方式可作为CPU集成输入点接线的参考。
(3)数字量输出接线数字量输出模块有4点、8点输出,4点输出分为晶体管输出和继电器输出,8点输出分为晶体管输出、继电器输出和交流输出,晶体管输出只能接成源型24V直流输出,电流从输出点流出,继电器输出是一组共用了一个公共端的干接点,可以接交流或直流,电压等级最高到220V,但要保证一组输出接同样的电压,继电器输出点接直流输出时功能端接正或负都可以,EM222的接线方式可作为CPU集成输出点的参考。
(4)CPU224XP高速I/OCPU224XP和CPU224XP si输入输出点有不同的特性,两者特高速输入点I0.3,I0.4,I0.5支持5-24V DC电压的源型或漏型输入,同组其他输入点输入电压可以仍然是24V DC,要求两者电源的公共端在1M处连接,CPU224XP高速输出点Q0.0,Q0.1,Q0.2,Q0.3,Q0.4成组支持5-24V DC电压输出,其他输出点输出24V DC,输出源型;CPU224XP si所有集成输出点均支持5-24V DC电压输出,输出漏型。
PLC控制步进伺服电机实现定位的几种方法

在工业加工和生产过程中,机械自动化或半自动化加工要求精准定位,因此在系统中使用伺服电机。
PLC 是一种只应用于工业生产的控制型计算机,具有抗干扰能力强、体力较小、可靠性较高的优点。
使用PLC 控制伺服电机,可以实现高效率和高精度的定位。
1 精确定位系统的总体设计精准定位系统的结构如图1所示,为了使丝杆精准进给,AD/DA 转换模块、交流伺服电动机、触摸屏、可编程還辑控制器(PLC)、精密零件如滚珠丝杆等构成闭合环路控制系统,工作时紧密配合。
通过夹具、固定工作台、移动工作台相互协调,完成不同型号零件的夹紧工作。
图1 系统总体设计方框图2 PLC 高速脉冲输出控制步进伺服电机定位2.1 控制系统的工作原理步进伺服电机是一种高精度定位控制系统。
工业生产过程中,步进伺服经常与丝杆连接,实现将旋转运动转变为工作台的直线运动。
控制工作台的直线运动距离,只需要控制步进伺服电机的转速和角位移即可。
步进伺服电机是由PLC 高速脉冲指令控制,原理是通过脉冲,PLC 输出PTO/PWM 指令,输出高速脉冲。
通过驱动器,步进电机会将工作台移动到相应位置,完成精确定位。
运行过程中,脉冲数会受到传动速比、脉冲当量、步进伺服电机驱动器的细分数及脉冲频率等因素的影响。
图2为高速脉冲输出方式的位置图。
图2 位置控制原理图2.2 控制系统的设计方案货物仓储系统多采用直线型导轨。
步进伺服电机以直线型导轨的移动方式,将材料移至距离为200mm 的工作地。
该系统为了精准定位,采用混合式步进电机、步进伺服电机驱动器,PLC 型号为CPU226的PLC(包含Q0.1端子和Q0.0端子两个脉冲发生器)。
系统可以形成多段和单段两种流水线形式,因为PTO 功能可以排队输出多个脉冲串,而操作过程中需要根据工作需求采用PTO 功能。
步距角设定为0.9°/1.8°,将脉冲细分数调至4,以消除电机低频震荡和提高分辨率。
步进伺服电机定位需要经历三个过程:启动加速、恒速运行和减速运行。
史上最全的西门子脉冲方式汇总

史上最全的西门子脉冲方式汇总
基本指令部分:
脉冲输出指令(PLS)用于在高速输出(Q0.0和Q0.1)上控制脉冲串输出(PTO)和脉宽调制(PWM)功能。
1、 PWM波
PWM产生一个占空比变化周期固定的脉冲输出。
可以以微秒或者毫秒为单位指定其周期和脉冲宽度:
周期:10 µs到65,535 µs 或2ms到65,535 ms
脉宽时间: 0 µs到65,535µs 或0ms到65,535 ms
注:脉宽≥周期值占空比是100%:连续接通输出。
脉宽=0 占空比是0%:连续关闭输出。
周期振动。
由于这个原因,建议采用PWM同步更新。
选择一个适合于所有周期时间的时间基准。
1.2特点:周期和脉宽都是以时间为单位特别是脉宽不是固定的 0-255 或者0-512
2、脉冲串操作(PTO)
TO按照给定的脉冲个数和周期输出一串方波(占空比50%)。
PTO可以产生单段脉冲串或者多段脉冲串(使用脉冲波形)。
可以指定脉冲数和周期(以微秒或毫秒为增加量):
脉冲数目: 1到4,294,967,295
周期:10 µs到65,535 µs或2ms到65,535 ms。
周期寄存器。
一旦启动了起始PTO段,就必须按照第二个信号波形的要求改变特殊寄存器,并再次执行PLS指令。
第二个脉冲串的属性在管道中一直保持到第一个脉冲串发送完成。
在管道中一次只能存储一段脉冲串的属性。
当第一个脉冲串发送完成时,接着输出第。
西门子伺服故障代码(附件五)
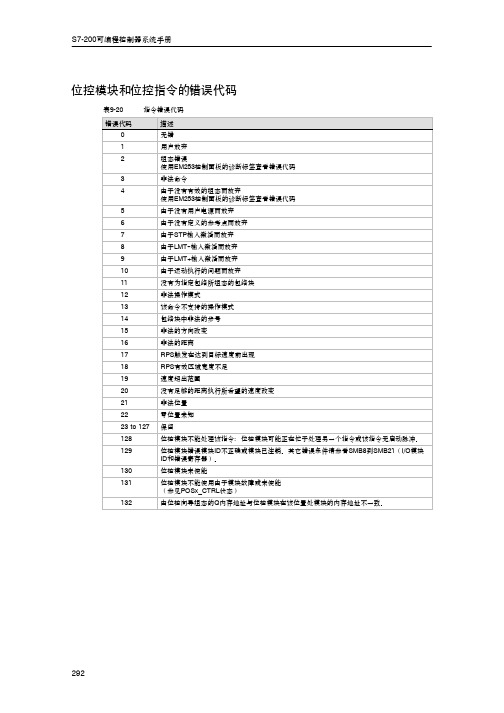
S7-200可编程控制器系统手册位控模块和位控指令的错误代码表9-20指令错误代码错误代码描述0无错1用户放弃2组态错误使用EM253控制面板的诊断标签查看错误代码3非法命令4由于没有有效的组态而放弃使用EM253控制面板的诊断标签查看错误代码5由于没有用户电源而放弃6由于没有定义的参考点而放弃7由于STP输入激活而放弃8由于LMT--输入激活而放弃9由于LMT+输入激活而放弃10由于运动执行的问题而放弃11没有为指定包络所组态的包络块12非法操作模式13该命令不支持的操作模式14包络块中非法的步号15非法的方向改变16非法的距离17RPS触发在达到目标速度前出现18RPS有效区域宽度不足19速度超出范围20没有足够的距离执行所希望的速度改变21非法位置22零位置未知23to127保留128位控模块不能处理该指令:位控模块可能正在忙于处理另一个指令或该指令无启动脉冲。
129位控模块错误模块ID不正确或模块已注销。
其它错误条件请参看SMB8到SMB21(I/O模块ID和错误寄存器)。
130位控模块未使能131位控模块不能使用由于模块故障或未使能(参见POSx_CTRL状态)132由位控向导组态的Q内存地址与位控模块在该位置处模块的内存地址不一致。
S7--200开环运动控制第9章表9-21模块错误代码错误代码描述0无错1无用户电源2没有组态块3组态块指针错误4组态块的大小超过了可用的V区5非法的组态块格式6定义了太多的包络7非法的STP_RSP定义8非法LIM--定义9非法LIM+定义10非法的FILTER_TIME定义11非法的MEAS_SYS定义12非法的RP_CFG定义13非法的PLS/REV值14非法的UNITS/REV值15非法的RP_ZP_CNT值16非法的JOG_INCREMENT值17非法的MAX_SPEED值18非法的SS_SPD值19非法的RP_FAST值20非法的RP_SLOW值21非法的JOG_SPEED值22非法的ACCEL_TIME值23非法的DECEL_TIME值24非法的JERK_TIME值25非法的BKLSH_COMP值S7-200Programmable Controller System ManualError Codes for the Position Module and the Position InstructionsT able9-20Instruction Error CodesError Code Description0No error1Aborted by user2Configuration errorUse the EM253Control Panel Diagnostics tab to view error codes3Illegal command4Aborted due to no valid configurationUse the EM253Control Panel Diagnostics tab to view error codes5Aborted due to no user power6Aborted due to no defined reference point7Aborted due to STP input active8Aborted due to LMT--input active9Aborted due to LMT+input active10Aborted due to problem executing motion11No profile block configured for specified profile12Illegal operation mode13Operation mode not supported for this command14Illegal number of steps in profile block15Illegal direction change16Illegal distance17RPS trigger occurred before target speed reached18Insufficient RPS active region width19Speed out of range20Insufficient distance to perform desired speed change21Illegal position22Zero position unknown23to127Reserved128Position module cannot process this instruction:either the Position module is busy withanother instruction,or there was no Start pulse on this instruction129Position module error:Module ID incorrect or module logged out.Refer to SMB8to SMB21 (I/O Module ID and Error Register)for other error conditions.130Position module is not enabled131Position module is not available due to a module error or module not enabled(See the POSx_CTRL status)132The Q memory address that was configured with the Position Control wizard does notmatch the memory address for the module at this location.Open Loop Motion Control with the S7-200Chapter9T able9-21Module Error CodesError Code Description0No error1No user power2Configuration block not present3Configuration block pointer error4Size of configuration block exceeds available V memory5Illegal configuration block format6T oo many profiles specified7Illegal STP_RSP specification8Illegal LMT--_RPS specification9Illegal LMT+_RPS specification10Illegal FILTER_TIME specification11Illegal MEAS_SYS specification12Illegal RP_CFG specification13Illegal PLS/REV value14Illegal UNITS/REV value15Illegal RP_ZP_CNT value16Illegal JOG_INCREMENT value17Illegal MAX_SPEED value18Illegal SS_SPD value19Illegal RP_FAST value20Illegal RP_SLOW value21Illegal JOG_SPEED value22Illegal ACCEL_TIME value23Illegal DECEL_TIME value24Illegal JERK_TIME value25Illegal BKLSH_COMP value。
S7-200PLC入门&精通(1)S7200硬件大全
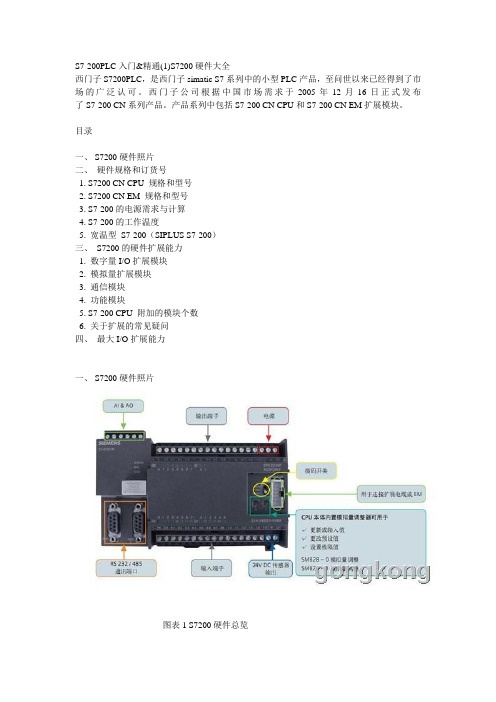
S7-200PLC入门&精通(1)S7200硬件大全西门子S7200PLC,是西门子simatic S7系列中的小型PLC产品,至问世以来已经得到了市场的广泛认可。
西门子公司根据中国市场需求于 2005 年 12 月 16 日正式发布了 S7-200 CN 系列产品。
产品系列中包括 S7-200 CN CPU 和 S7-200 CN EM 扩展模块。
目录一、 S7200硬件照片二、硬件规格和订货号1. S7200 CN CPU 规格和型号2. S7200 CN EM 规格和型号3. S7-200的电源需求与计算4. S7-200的工作温度5. 宽温型S7-200(SIPLUS S7-200)三、S7200的硬件扩展能力1. 数字量I/O扩展模块2. 模拟量扩展模块3. 通信模块4. 功能模块5. S7-200 CPU 附加的模块个数6. 关于扩展的常见疑问四、最大I/O扩展能力一、 S7200硬件照片图表 1 S7200 硬件总览图表 2 S7200 CPU指示灯图表 3 S7200 订货号和串号图表 4 功能模块图表 5 功能模块订货号和串号二、硬件规格和订货号2. S7200 CN EM 规格和型号3. S7-200的电源需求与计算S7-200 CPU模块提供5VDC和24VDC电源:当有扩展模块时CPU通过I/O总线为其提供5V电源,所有扩展模块的5V电源消耗之和不能超过该CPU提供的电源额定。
若不够用不能外接5V电源。
每个CPU都有一个24VDC传感器电源,它为本机输入点和扩展模块输入点及扩展模块继电器线圈提供24VDC。
如果电源要求超出了CPU模块的电源定额,你可以增加一个外部24VDC电源来提供给扩展模块。
所谓电源计算,就是用CPU所能提供的电源容量,减去各模块所需要的电源消耗量。
4. S7-200的工作温度S7-200的工作环境要求为:0°C-55°C,水平安装0°C-45°C,垂直安装相对湿度95%,不结露5. 宽温型 S7-200(SIPLUS S7-200)西门子还提供S7-200的宽温度范围产品(SIPLUS S7-200):工作温度范围:-25 °C ... +70 °C相对湿度:55°C时98%,70°C时45%其他参数与普通S7-200产品相同三、 S7200的硬件扩展能力除了CPU221外,S7-200的其他CPU型号都可以附加扩展模块,以增加I/O点数、扩展通信能力和一些特殊功能。
西门子EM253定位模块

EM253定位模块电机可以在手动的操作模式下,以不同运动速度进行“正”或者“负”方向的运动。
编程应用:1.仅仅在“POSx_CTRL ”、“ POSx_DIS ”命令被执行以后,才允许执行“POSx_MAN”命令;2.用户只能在同一个时间内,对其中一个输入参数“RUN ”、“JOG_P”或者“JOG_N ”做置位使能操作;3.借助判断 CTRL 命令输出参数“Done”的状态。
确保模板在没有执行任何其他运动控制之前,启动 MAN 命令;4.置位操作输入参数“EN”。
并且,在同一个 PLC 扫描周期内,输入信号触发操作其中一个输入参数“RUN ”、“JOG_P”或者“JOG_N”,发送手动操作命令给定位模板 EM 253 ;置位输入参数“RUN ”,可以使电机按照参数指定的速度和方向运动。
当电机运转的时候,用户可以改变速度值参数大小,但是不可以改变运动方向参数。
复位输入参数“RUN ”,可以使电机减速直到停止。
速度参数(Speed )定义了运动的速度大小。
如果定位模板 EM 253 所定义的系统测量单位为“脉冲数/秒钟”,则速度参数应该使用 DINT 数据类型定义。
如果定位模板 EM 253 所定义的系统测量单位为“距离单位/秒钟”,则速度参数应该使用 REAL 数据类型定义;5.置位输入参数“JOG_P”或者“JOG_N ”时间超过0.5 秒钟,可以使电机按照相应的方向和“Position Control Wizard”配置工具所定义的速度(JOG_SPEED)运转。
否则,电机只是运转“Position Control Wizard ”配置工具所定义的距离(JOG_INCREMENT);6.输出参数“Dir,Error,C_Pos,C_Speed ”,提供了定位模板 EM 253 的当前运行状态、出错信息、运行位置、运行速度、运动方向,等等。
“POSx_GOTO”命令,可以使机械设备按照“GOTO”命令给出的速度值、位置值,以指定的操作模式运动到相应的机械设备坐标系位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定位模板EM253快速入门Getting Started of Position Module EM253摘 要该文档主要面对初次使用定位模板 EM 253 的用户。
内容包括一些调试的步骤,使用经验,等等。
但是,该文档无法取代《SIMATIC S7—200 系统手册》。
建议:用户通过此文档掌握了初步调试和使用模板的方法以后,还是要认真、仔细阅读《SIMATIC S7—200 系统手册》第9 章,进一步加深对定位模板 EM 253 的理解。
该文档,希望对初次使用定位模板EM 253 的用户,可以起到帮助入门的作用。
定位模板 EM 253 模板的使用者,应该具有STEP 7-MicroWIN 软件操作的基础知识。
关键词 定位模板;EM253Key Words Position Module;EM253A&D Service & Support Page 2-47目录1 模块概述 (5)1.1 模块特点概述 (6)1.2 S7-200 CPU 附加的定位模块EM 253 个数 (6)1.3 定位模块EM 253 订货号为: (6)2 调试定位模板 EM 253 基本思路 (6)3 准备工作 (7)4 定位模板 EM 253 输入、输出点说明5 定位模板 EM 253 的安装和接线 (7)5 定位模板EM253安装和接线 (9)5.1 定位模板 EM 253 内部的输入、输出点接线图 (9)5.2 连结定位模板 EM 253 与SIMATIC FM Step Drive 的接线图 (10)5.3 连结SIMATIC FM Step Drive 到Simostep 的接线图 (11)5.4 连结定位模板 EM 253 与 Industrial Devices Corp. 的接线图 (12)5.5 连结定位模板 EM 253 与日本、中国标准驱动器(Oriental Motor UPK Standard)接线图 (13)5.6 连结定位模板 EM 253 与 Parker/Compumotor OEM 750 接线图 (14)6 应用“Position Control Wizard”配置定位模板EM253 (14)6.1 打开“Position Control Wizard ”配置工具 (14)6.2 选择用于S7—200 PLC 的位置控制模式; (15)6.3 输入定位模板 EM 253 的逻辑位置 (15)6.4 输入系统的测量单位(“工程量”或者“脉冲数/转”) (16)6.5 编辑输入、输出点配置 (16)6.6 定义模板输入信号LMT+、LMT-、STP 的功能 (17)6.7 定义电机的速度 (17)6.8 定义手动操作的参数设置 (18)6.9 加、减速度的时间参数设置 (18)6.10 设置运动位置拐点参数 (19)6.11 设置模板的找寻原点位置参数 (19)6.12 设置定位模板 EM 253 的运动轨迹包络 (21)6.13 完成组态 (23)A&D Service & Support Page 3-477 应用定位模板 EM 253 调试界面 (24)7.1 操作定位模板 EM 253 ,显示运动状态 (24)7.2 显示、修改定位模板 EM 253 的配置运动控制参数 (27)7.3 诊断定位模板 EM 253 的错误信息 (28)8 程序编制 (28)8.1 基本介绍 (28)8.2 功能子程序 (30)8.2.1 POSx_CTRL (30)8.2.2 POSx_MAN (31)8.2.3 POSx_GOTO (33)8.2.4 POSx_RUN (34)8.2.5 POSx_RSEEK (36)8.2.6 POSx_LDOFF (37)8.2.7 POSx_LDPOS (38)8.2.8 POSx_SRATE (39)8.2.9 POSx_DIS (40)8.2.10 POSx_CLR (41)8.2.11 POSx_CFG (42)9 错误诊断 (42)9.1 定位模板 EM 253“LED”状态指示灯 (42)9.2 操作错误评估 (43)9.3 模板错误评估 (45)A&D Service & Support Page 4-471 模块概述图 1:EM 253 模板定位模板 EM 253 ,集成有“5 个数字量输入点”(STP,停止;RPS, 参考点开关;ZP,零脉冲信号;LMT+,正方向硬极限位置开关;LMT-,负方向硬极限位置开关),“6 个数字量输出点”(4 个信号:DIS,CLR,P0,P1,或者P0+、P0-,P1+ 、 P1-), 用于S7-200 PLC 定位控制系统中。
通过产生高速脉冲来实现对单轴步进电机的开环速度、位置控制。
通过S7-200 PLC 的扩展接口,实现与CPU 间通讯控制。
定位模板 EM 253 应用于位置控制的过程,实现起来非常简单。
STEP 7MicroWIN 提供了一个定位模板 EM 253 配置的向导操作(Position Control Wizard) ,可以帮助您在很短的几分钟时间内完成配置操作,存储在S7-200 PLC 的V 区内;同时,STEP 7-MicroWIN 还提供了一个界面非常友好,专门用于调试、监控运动控制过程的调试界面(定位模板 EM 253 A&D Service & Support Page 5-47Control Panel)。
1.1 模块特点概述位置开环控制模式。
无法实现位置闭环控制模式; 高速。
提供从12HZ 到200KH 的脉冲频率; 增、减速度的曲线拐点,既支持S 曲线,也支持直线;控制系统的测量单位,既可以采用脉冲数,也可以采用工程单位(如:英尺、厘米);提供螺距补偿功能;多种工作模式。
绝对方式、相对方式、手动方式; 提供连续的位置控制工程。
最多可以支持25 个位置点的控制。
每段运动轨迹包络,可以有最多4 种不同的速度实现;提供4 种不同找寻原点的方式;便捷安装、拆卸的端子连接器。
1.2 S7-200 CPU 附加的定位模块EM 253 个数S7-200 CPU 附加的定位模块EM 253 个数,取决于CPU 的电源带载能力。
如何计算,参见S7-200 系统手册中的电源预算部分;CPU 型号EM 253CPU 221 -CPU 222 1CPU224/224XP 3CPU 226 51.3 定位模块EM 253 订货号为:6ES7 253--1AA22--0XA0”2 调试定位模板 EM 253 基本思路用户使用定位模板 EM 253 做开环位置控制,调试的基本思路:1) 根据所选择的步进电机驱动器,完成相应的模板接线;2) 通过STEP 7 Micro/WIN 软件的“Position Control Wizard ”配置工具,在离线的情况下,配置定位模板 EM 253 的运动参数、运动轨迹包络,等等;A&D Service & Support Page 6-473) 应用“POSx_CTRL ”命令编制程序。
使用SM 0.0 接通参数“EN”、“MOD_EN”;4) 确保S7 - 200 PLC 的模式开关设置为TERM 或者RUN;5) 下载用户的项目(包括Program Block,Data Block,System Block)到S7 -200 PLC;6) 确保S7 - 200 PLC 运行状态由STOP 到RUN ,再由RUN 到STOP。
完成模板的自检、初始化操作;7) 确保定位模板 EM 253 运行状态为:LED 灯“MF”灭,“MG”常亮、“PWR” 常亮;8) 选择Tools > “EM 253 Control Panel”。
如果,电机的驱动器“使能信号”来自“DIS ”输出,那么,首先“Activity DIS output ”,使“DIS ”输出LED 灯常亮;然后,再调试设置的运动参数、运动轨迹包络,等等;9) 按照用户的工艺,编制用户程序。
下载用户程序到S7 - 200 PLC;10) 调试用户程序;11) 结束。
3 准备工作带有STEP 7 Micro/WIN 软件的编程设备,软件版本 V3.2 以上;PC/PPI 电缆,或者CP5611/5511/5512/5411 卡和MPI 电缆;一个CPU22X, 订货号为 6ES7 xxx-xxXX21-xXXx ,固件版本 V 1.2 或更高版本;一个EM253 定位模板,订货号为 6ES7 253-1AA22-0XA0;一台SIMATIC FM-STEP DRIVER/SIMOSTEP Power Controller(订货号为6SN12 27 – 2ED10 – 0HA0);一台步进电机(如:SIMOSTEP 1FL3042,4NM,2.0A。
(订货号为 1FL3042-0AC31-0BK0);三个行程开关或者接近开关(根据模板接线的不同,接近开关可以选择源型, 或者漏型输入类型)。
分别作为:硬件左极限位置开关、硬件右极限位置开关和参考点开关。
4 定位模板 EM 253 输入、输出点说明5 定位模板 EM 253 的安装和接线端子 输入/输出 功能M 模板电源24V-L+ 模板电源24V+A&D Service & Support Page 7-47LMT- 输入 “-方向”运动的硬件极限位置开关 MM+5V 输出5V 电压P0- 输出 P0+ 输出 P1+ 输出 P1- 输出 步进电机运动、方向控制的脉冲输出。
与P0、P1 输出控制方式相比,可以提供更高质量的控制信号;选择何种输出脉冲方式,取决于电机驱动器P0 输出P1 输出步进电机运动、方向控制的脉冲输出DIS 输出 使能、非使能电机的驱动器CLR 输出 用于清除步进电机驱动器的脉冲计数寄存器T1 与+5V 、P0、P1、DIS 结合一起使用A&D Service & Support Page 8-475 定位模板EM253安装和接线5.1 定位模板 EM 253 内部的输入、输出点接线图A&D Service & Support Page 9-475.2 连结定位模板 EM 253 与SIMATIC FM Step Drive 的接线图A&D Service & Support Page 10-475.3 连结SIMATIC FM Step Drive 到Simostep 的接线图A&D Service & Support Page 11-475.4 连结定位模板 EM 253 与 Industrial Devices Corp. 的接线图图 2A&D Service & Support Page 12-475.5 连结定位模板 EM 253 与日本、中国标准驱动器(Oriental Motor UPK Standard)接线图A&D Service & Support Page 13-475.6 连结定位模板 EM 253 与 Parker/Compumotor OEM 750 接线图6 应用“Position Control Wizard”配置定位模板 EM 253通过“Position Control Wizard ”配置工具,帮助用户在离线的情况下,轻松地一步步配置定位模板 EM 253 的运动参数、运动轨迹包络,等等;下面操作的描述,是针对使用编程软件STEP 7 MicroWIN V3.2 + SP4 而言 (编程软件V4.0 版本的操作画面,略有不同) 。