简易型水果采摘机
便携式水果采摘器的设计研究
便携式水果采摘器的设计研究随着社会的发展和人们生活水平的提高,水果已经成为人们日常饮食中不可或缺的一部分。
由于水果生长的地点和高度的限制,很多好吃的水果并不容易采摘到。
为了解决这一问题,研发出便携式水果采摘器成为了一个热门的话题。
本文将针对便携式水果采摘器的设计进行研究,并提出一些具体的设计方案。
一、市场需求分析在一些农村地区,农民在收获水果的时候,由于水果生长的高度较高,因此需要借助梯子等工具来采摘水果。
但是梯子不方便携带,而且在采摘水果的时候也存在很多安全隐患。
便携式水果采摘器也可以在这方面发挥很大的作用。
市场上存在着对便携式水果采摘器的需求,而且这个需求还将会随着人们生活水平的提高而不断增加。
二、设计原则1. 便携性:便携式水果采摘器的设计首要考虑的是便携性。
用户希望能够将采摘器轻松地放入口袋或者包中,方便携带。
2. 稳固性:在使用便携式水果采摘器的时候,用户希望能够感到采摘器的稳定性。
这样一来,用户在使用采摘器的时候能够更加轻松,也可以保障自己的安全。
3. 多功能性:在设计便携式水果采摘器的时候,可以考虑增加一些功能,比如防滑设计、高度可调等功能,来提高采摘器的实用性。
4. 轻便易用:便携式水果采摘器应该尽量减少使用者的体力消耗,让使用者能够轻松地完成采摘任务。
三、设计方案一种常见的便携式水果采摘器设计方案是由一个伸缩杆和一个夹具组成。
这种设计方案将杆子伸出来,夹具夹住水果,然后通过用户的手动操作,将水果采摘下来。
这种设计方案便携性较好,但是存在着稳定性较差,用户需要花费一定的体力来完成采摘任务的问题。
另一种设计方案是采用夹式设计,凭借装在便携式水果采摘器上的装置来将水果夹取到。
这种设计方案克服了伸缩杆稳定性不佳的问题,同时用户可以轻松地夹取到水果,省去了手动操作的麻烦。
还有一种设计方案是将便携式水果采摘器设计成一种类似于撑杆跳的结构,用户可以通过压缩弹簧的方式将水果从树上弹下来。
这种设计方案在一定程度上减小了用户的体力消耗,同时使得水果采摘更加轻松。
摘果神器的制作方法

摘果神器的制作方法一、简介在现代社会,越来越多的人开始关注健康饮食和有机食品。
新鲜的水果是健康饮食的重要组成部分,但是摘取高树上或者大树上的果实并不容易。
为了解决这个问题,我们可以制作一种摘果神器来方便快捷地摘取高处的水果。
本文将详细介绍摘果神器的制作方法。
二、材料准备准备以下材料:1.长杆:使用轻质而坚固的材料,建议选择铝合金或者碳纤维材质;2.钳子:选择一把夹持力强的钳子,可以灵活调整夹持的力度;3.绳子:用于固定果实,选择坚固耐用的绳子即可;4.胶带:用于固定杆子和钳子的连接处。
三、制作步骤1. 确定杆子的长度首先,根据实际需要确定杆子的合适长度。
一般来说,建议选择一根长度为2-3米的杆子,这样可以轻松达到大多数常见果树的高度。
2. 杆子和钳子的连接将钳子和杆子的一端用胶带牢固地固定在一起。
确保连接处结实可靠,不会松脱。
3. 绳子的处理将绳子的一端绑在钳子的夹持处,用结实的结扎紧。
同时,确保绳子的长度适中,方便夹取果实时的操作。
4. 测试和调整完成以上步骤后,将摘果神器测试到果树下进行实际操作。
按下面的步骤进行调整:1.将钳子对准果实,确保将果实夹住;2.用手轻轻摇动杆子,确保果实牢固夹持不会脱落;3.检查绳子的固定,确保摘取果实时绳子不会松脱。
四、使用技巧摘果神器制作完成后,根据实际使用情况,我们还可以使用一些技巧来提高效率和安全性。
1. 视角选择在摘取果实时,选择一个合适的视角非常重要。
可以站在果树下方,用摘果神器夹取果实。
也可以站在树旁边的位置,将摘果神器伸向树上夹取果实。
选择一个合适的视角可以确保稳定和准确地夹取果实。
2. 动作轻盈使用摘果神器时,需要保持动作轻盈。
过于用力或者突然用力可能会导致果实坠落或者损坏,所以在使用过程中要注意保持稳定和平稳的动作。
3. 安全注意事项在操作过程中,要注意自身安全。
不要在强风或者下雨天气使用摘果神器,确保自己的人身安全。
同时,也要注意周围的人和物品,避免对他人和物品造成伤害。
一种新型自动化水果采摘机械的设计
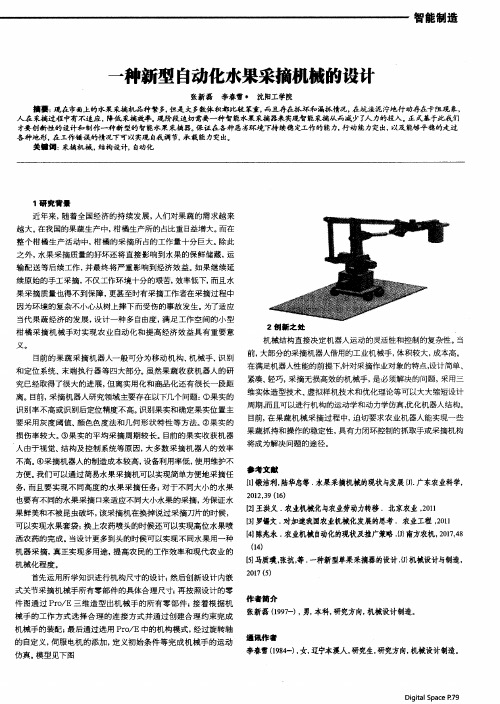
作者 简介 张新磊 (1997-),男,本科,研究方向,机械设计制造。
机 械手 的装 配 ;最 后通 过 选用 PrO/E中的机 构 模式 ,经过 旋 转轴
的自定义,伺服电机的添加,定义初始条件等完成机械手的运动 通讯作 者
仿真 。模型 见下图
李春雪(1984-),女,辽宁本溪人,研究生,研究方向,机械设计制造。
要 采用 灰 度阈 值 、颜 色色 度法 和几 何形 状 特 性等 方 法。②果实 的 目前 ,在果 蔬 机 械采 摘 过 程中 ,迫切 要求 农 业机 器人能 实现 一些
损 伤率 较 大。③果 实的 平均 采 摘 周期 较长 。目前 的果 实收 获机 器 果蔬 抓持 和操 作的 稳定性 ,具 有力闭环 控制 的抓取 手或 采摘 机构
续原 始的 手工 采摘 ,不仅 工作 环境 十分 的艰苦 ,效率低 下,而且 水 果采 摘 质量 也得 不到 保障 ,更甚 至 时有采环境 的 复杂不 小 心从树上 摔 下而 受伤 的事故 发 生 。为了适 应
当代 果 蔬 经济 的发 展 ,设 计 一种 多 自由度 ,满 足 工作 空 间 的小 型
柑橘 采 摘 机 械手 对 实现 农 业 自动化 和 提高 经 济 效益 具 有 重要 意
2刨 新之 处
义 。
机 械结 构直接 决 定机 器人运 动的 灵活性和 控制 的复杂 性 。当
前 ,大部分 的采 摘机 器人借用 的工业机 械手 ,体积 较大 ,成本 高。 目前 的果 蔬 采 摘 机 器人一 般可分 为移 动机 构 、机 械 手、识 别
可以实 现水 果套 袋 ;换 上农 药喷 头的 时候 还可 以实现高 位 水果 喷 【3】罗锡文 .对加速我国农业机械化发展的思考 .农业工程 ,2011
果蔬采摘机器人

PART 2
工作原理
工作原理
果蔬采摘机器人的工作原理主要基于传感器和机器视觉技术。首先, 机器人通过GPS和地理信息系统(GIS)技术,确定果园的位置和布局。 然后,机器人利用机器视觉技术,通过高清摄像头获取果园的图像信 息,再通过计算机视觉算法对图像进行处理和分析,以识别和定位成 熟的果蔬。同时,机器人还配备有多种传感器,如温度、湿度、光照 等,以监测果园的环境参数
然而,果蔬采摘机器人的发展也面临着一些挑战。首先,机器人的制造成 本较高,需要大量的研发和试验工作。其次,机器人的运行和维护需要专 业技术人员支持,增加了使用成本。此外,机器人还需要进一步优化和完 善其功能和技术性能,以满足不同果园的采摘需求
PART 5
未来展望
未来展望
随着科技的不断进
未来,机器人
果蔬采摘机器 人
-
1
简介
2
工作原理
3
技术特点
4
优势与挑战
5
未来展望
PART 1
简介
简介
果蔬采摘机器人是一种 自动化农业设备,主要 用于采摘水果和蔬菜
这种机器人通过先进的 传感器和机器视觉技术 ,可以在不同的环境和 气候条件下,准确地识 别和采摘成熟的果蔬
果蔬采摘机器人的出现 ,大大提高了采摘效率 ,减少了人力成本,是 现代农业发展的重要方 向之一
量
最重要的是,果蔬采摘机器人采用了先 进的机器视觉技术,能够通过图像处理 和分析,准确地识别和定位成熟的果蔬。 这种技术不仅提高了采摘效率,还能保 证采摘的果蔬质量。此外,机器人还具 有一定的自我学习能力,能够在实践中 不断优化采摘策略和路径规划,提高采
摘效果
PART 4
优势与挑战
摘果神器的制作方法

摘果神器的制作方法摘果神器的制作方法摘果神器是一种可以帮助人们快速、方便地采摘水果的工具。
它可以减少采摘时的劳动强度,提高采摘效率,因此备受广大果农和爱好者的欢迎。
本文将介绍如何制作一款简单实用的摘果神器。
材料准备- 铁丝:直径约为2毫米,长度约为60厘米。
可以使用铁丝或钢丝。
- 塑料管:直径约为1.5厘米,长度约为30厘米。
可以使用PVC管或其他塑料管材料。
- 手套:用于保护手部。
工具准备- 钳子:用于弯曲铁丝。
- 剪刀:用于剪断铁丝和塑料管。
- 手电钻:用于在塑料管上打孔。
步骤说明1. 制作铁丝框架首先,将铁丝弯成一个圆形,并将两端交叉成一个X形。
然后,将两端各自向内弯曲成一个小圆环,并将其与圆形框架连接起来。
这样就完成了一个简单的铁丝框架。
2. 制作摘果钩接下来,使用钳子将铁丝弯成一个S形,并在其中间留出一个小勾。
这个小勾就是用来摘取水果的。
然后,将另一端弯曲成一个圆环,并将其与铁丝框架连接起来。
这样就完成了一个摘果钩。
3. 制作手柄为了方便操作,需要在摘果神器上加上一个手柄。
首先,将塑料管剪成适当长度,并用手电钻在其中间打一个孔。
然后,将铁丝框架插入塑料管中,并用铁丝固定住。
最后,在塑料管的孔上穿过一根绳子或皮带,作为手柄使用。
4. 完成组装最后,将制作好的摘果钩插入铁丝框架上,并用铁丝固定住。
整个摘果神器就完成了。
使用方法使用时,只需将摘果神器的勾挂在水果上轻轻一拉即可采摘下来。
由于手柄的存在,可以更加轻松地控制力度和角度,从而避免损坏水果或树木。
注意事项- 制作时要注意安全,避免划伤手部。
- 使用时要注意力度,避免用力过大损坏水果或树木。
- 使用后要及时清洗和消毒,避免细菌滋生。
采摘机器人简介ppt课件
10
3.2机械手
机械手又称操作机,是指具有和人手臂相似的动作功 能,并使工作对象能在空间内移动的机械装置,是机 器人赖以完成工作任务的实体。在收获机器人中,机 械手的主要任务就是将末端执行器移动到可以采摘的 目标果实所处的位置,
直角坐标
圆柱坐标
极坐标
球坐标
多关节 (类人)
其工作空间要求机器人能够达到任何一个目标果实。 相比其它结构比较起来,要求更加灵活和方便。机 械手的自由度是衡量机器人性能的重要指标之一,它 直接决定了机器人的运动灵活性和控制的复杂性。
4
2 国内外采摘机器人的研究进展
传统采摘机器人类型
机械震摇式
气动震摇式
现今主要依靠的技术
工业机器人技术
计算机 图像处理技术
人工智能
目前,日本、荷兰、法国、英国、意大利、美国、以色列、西班牙 等国都展开了果蔬收获机器人方面的研究工作。涉及到的研究对象 主要有甜橙、苹果、西红柿、樱桃西红柿、芦笋、黄瓜、甜瓜、葡 萄、甘蓝、菊花、草莓、蘑菇等,但这些收获机器人目前都还没能 真正实现商业化。
29
参考文献
[1] 赵 匀,武传宇.农业机器人的研究进展及存在的问题 [J].农业工程学报,2013,19(1):20-24. [2]孙进良,刘师多,丁慧玲.我国玉米收获机械化的应 用现状与展望[J].农机化研究,2011,31(3):217— 219. [3]沈明霞.,姬长英..农业机器人的开发背景及技术动向 [J].农机化研究,2010(5):31-35. [4]汤修映,张铁中.果蔬收获机器人研究综述[J].机器人, 2012,27(1):90-96. [5]蔡自兴,机器人学[M].北京:清华大学出版社,
存在的问题
②果实的损伤率较大。
一种可伸缩单果采摘器的设计

王丽娟,刘志刚,喜冠南,等.一种可伸缩单果采摘器的设计[J].江苏农业科学,2020,48(21):245-249.doi:10.15889/j.issn.1002-1302.2020.21.047一种可伸缩单果采摘器的设计王丽娟1,刘志刚1,喜冠南2,彭超华2(1.南通科技职业学院机电与交通工程学院,江苏南通226007;2.南通大学机械工程学院,江苏南通226019) 摘要:设计一种新型可伸缩的单果采摘器及具备柔性防护的水果收集装置,用于辅助果农进行果实采摘与收集,旨在降低果农的劳作强度、提高果园生产率、提高水果品质,推动我国水果采摘的机械化发展。
该水果采摘器主要用于:(1)苹果类水果生长过高以及分布不均匀导致不易采摘的情形;(2)桃子类多汁且脆硬水果在采摘过程中容易碰伤导致水果不易存储的情形。
采摘器主要包括伸缩管、牵拉机构、剪切刀、柔性网筒及可移动收果小车等5个部分。
该装置操作简单、价格低廉、实用性强,适用于不同高度、多种类水果的采摘作业。
关键词:可伸缩采摘杆;单果采摘器;牵拉机构;剪切刀;单果收集 中图分类号:S225.93 文献标志码:A 文章编号:1002-1302(2020)21-0245-04收稿日期:2020-02-26基金项目:南通市市级科技计划(编号:MS12018091)。
作者简介:王丽娟(1989—),女,江苏南京人,硕士,助教,主要从事机械工程及自动化领域的研究。
E-mail:wanglijuan92008@163.com。
通信作者:刘志刚,硕士,副教授,主要从事机械工程领域的研究。
E-mail:lzgntnx@126.com。
随着我国社会经济的快速发展以及人民消费水平的迅速提高,使得人们对水果的需求和品质都提出了更高的要求,这种现象也在我国近年来的水果市场不断扩大的趋势上有所体现。
但受制于传统的果园管理水平和水果采摘技术,我国果农仍以人工采摘为主,在生产过程中损失的水果数量也是不计其数。
弹指式小型红枣捡拾机的设计

前言红枣是我国广泛种植的特色林果,其种植面积和产量占全世界的 99%。
红枣中含有丰富的芦丁、环磷酸腺苷,能够防止和治疗心脑血管疾病,具有抗过敏作用,抑制癌细胞生长并促进癌细胞转化成正常细胞的功能,其经济价值和药用价值极高。
新疆地处欧亚大陆腹地,干旱少雨,日照长,光热资源丰富,昼夜温差大,适宜栽培品质优良、产量高的红枣。
近年来,新疆红枣的种植面积不断增长,目前新疆红枣的种植面积近26.7万平方千米。
但红枣的收获主要依赖于人工,劳动强度大、效率低、成本高,且收获季节多与棉花等其它经济作物收获期重合,导致雇工极其困难,不能适时收获,造成不必要的损失。
随着红枣规模化、产业化发展,依靠人工收获已不能满足红枣产业化生产的需求,实现红枣机械化收获已是红枣产业发展的必然趋势。
关键词:红枣;机械化;采收目录1绪论 (1)1.1课题研究的意义 (1)1.2国内外现状及分析 (1)1.3.研究的内容和方法 (2)2弹指式红枣捡拾机的结构设计 (2)2.1总体设计方案 (2)2.2各个主要部件的结构示意图及其功能 (3)2.2动力的选择 (5)2.3设计要求 (5)2.4设计方案 (5)3弹指式红枣捡拾机的零件设计 (5)3.1 计算捡拾棍带轮直径及转速 (5)3.2 V带的选取 (6)3.3 V带线速度的检验 (7)3.4 计算中心距及基准长度 (7)3.5计算A型普通v带根数 (8)3.6求作用在带轮轴上的压力 (8)3.7计算带传动作用在轴上的力(简称压轴力) (9)3.8 捡拾装置带轮结构参数 (9)3.9捡拾装置轴与齿轮的计算 (9)总结 (15)致谢 (15)参考文献 (17)1绪论1.1课题研究的意义据史料记载,枣是原产中国的传统名优特产树种。
经考古学家从新郑斐李岗文化遗址中发现枣核化石,证明枣在我国已有8000多年历史。
随着红枣的种植面积的增加,红枣的机械化作业在红枣栽培中的重要性逐渐凸显。
依据最近几年新疆林果业发展的态式分析,新疆果树种植每年以10%的速度递增,由于林果业的快速发展,各地已形成了较大的种植规模,每到收获季节需要投入大量的劳力来完成水果采收。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、选题名称:
简易型水果采摘机
二、选题背景:
随着时代的发展,国民生产总值的增长,我国的经济总量正在持续增长,而农业在人们的生活中扮演着重要的角色,它是人们生活的最基本保障,农业的发展也成了人们生活水平的伊个重要标志。
现代农业向着机械化的时代发展,机械正在逐渐代替人们原始的劳动工具和原始的劳动方法,而且现代农业正呈现着前所未有的发展潜力,机械化的农业时代具有效率高、安全、便捷的特点。
在黄土高原上和其他地方有很多果农,他们用自己朴实的劳动为现代大城市的人们培育了大量的优质水果,但是一直以来在很多地方,人们还用着原始的人工采摘方法,现代的大型采摘机器又太过昂贵,人们在考虑自己的经济利益的同时不得不放弃机械采摘的高效率方法。
鉴于大多数农民不能承受大量的经济压力,从而设计简易的水果采摘机,方便农民采摘水果,也提高了农民的工作效率。
现在市面上的水果采摘机品种繁多,已申请专利的有二十个左右,每个产品有各自的特点,价格也大相径庭,人们有很多的选择余地;电动、手动、自动的,但是大多数体积都比较笨重,人本在采摘过程中有不适应感。
简易水果采摘机的原理很简单,和剪刀的原理是相同的杠杆原理。
人们用手里的手柄就可以简单的采摘果树高处的水果,结构简单,容易操作,安全舒适,可以实现不同高度和不同大小水果的采摘,而切还可以执行水果套袋任务,同时把执行机构的支架用作喷洒农药的支撑结构,实现了多用途。
如果投放市场可以成为果农的好选择!该简易水果采摘机也有不足的地方,结构简单,是非自动的···如果人们举着时间过长会有疲劳酸痛的感觉,而且水果在输送带里面可能会有擦伤,损坏水果造成不必要的经济的损失。
简易水果采摘机与其他同类机器相比结构简单,价格便宜,容易操作,而且可以满足不同高度的水果采摘任务。
把人们常见的、普通的剪刀杠杆原理利用进来,实现了农业的需求,果农都能接受,是他们的最佳选择.
三、方案的总体描述、拟实现的功能与应用场合及特点:
(1)、方案的总体描述:
总是在农村看见农民很吃力的爬上果树,或者站在梯子上进行水果,一方面不安全,另一方面对果树的树皮也不好。
为此设计简易水果摘机。
该水果采摘机最大的特点就是简易、方便、便宜、该水果采摘机结构简单,其中包括操作手柄1,工作杆2,反弹弹簧
3,执行机构架4,手柄架5,执行采摘刀片6,水果运送带7。
其中执行机构架的B段和运动杆是可伸缩杆,用以满足不同高度的采摘任务。
当果农驱动操作手柄的时候,根据杠杆原理,可驱使执行采摘刀片进行剪切,水果被剪切后,顺着用棉质材料制成的水果运送带掉进水果筐里面。
棉质的水果运送带可保证水果表面不受摩擦,从而保证了水果的质量和质地。
(2)、该发明拟实现的功能:
通过简易水果采摘机可以实现简单方便地采摘任务,而且要实现不同高度的水果采摘任务;对于不同大小的水果也要有不同的水果采摘口来适应不同大小水果的采摘,为保证水果鲜美和不被昆虫破坏,该采摘机在换掉说过采摘刀片的时候,可以实现水果套袋;换上农药喷头的时候还可以实现高位水果喷洒农药的完成。
当设计更多到头的时候可以实现不同水果用一种机器采摘,真正实现多用途,提高农民的工作效率和现代农业的机械化程度。
(3)、产品的应用场合及其特点
应用场合:大中小型果园的水果采摘,对于苹果、桃子、鸭梨、杏、李子等类球形水果的采摘,水果树木高大,高位水果不易采摘,人工采摘费时费力的情况下,均可使用该简易型水果采摘机。
对于高位的水果农药喷洒任务,高位、树枝头等人不易够得着的水果套袋任务。
特点:与以前的水果采摘机相比,该型水果采摘机有简单、容易操作、价格便宜、用途较多,机器采摘对水果的损伤小,机器材质都用塑料制成,轻便,采摘效率高而且到头等可以进行二次更换,产品的利用率提高。
四、工作原理与结构:
(1)、工作原理及工作原理图:
该水果采摘机结构简单,其中包括操作手柄1,工作杆2,反弹弹簧3,执行机构架4,手柄架5,执行采摘刀片6,水果运送带7。
其中执行机构架的B段和运动杆是可伸缩杆,用以满足不同高度的采摘任务。
当果农驱动操作手柄的时候,根据杠杆原理,可驱使执行采摘刀片进行剪切,水果被剪切后,顺着用棉质材料制成的水果运送带掉进水果筐里面。
棉质的水果运送带可保证水果表面不受摩擦,从而保证了水果的质量和质地。
当果农把采摘刀片更换为套袋装置,便可以进行水果的套袋工作,方便快捷,效率高。
同时果农也可以用采摘机的执行架作为支架进行农药喷洒工作,综上所诉,该简易
型水果采摘机实现了农业生产中的不同工作的集中化。
简易型水果采摘机原理示意图
(2)、分析计算:
N=3, ph=4 所以:该执行机构的自由度为:
f=3x3—2x4=1
即该机构具有唯一的运动方式一般水果树的高度在3—4米之间,所以该机构操作杆的长度也应该设置在该高度范围左右,又由于执行杆和支撑杆都市可伸缩杆,所以该产品的正常状态下的长度为1米左右。
这两个杆设置为四个短节,拉长后可达到果树的高度。
对于水果运送带,由于它必须通到地面且为防止与地面发生严重的碰撞,所以运送带要比执行杆长1米左右,即就是运送带在5米左右的长度。
到头的直径要比一般水果大,设置为12cm左右即可。
三、其余说明:
该水果采摘机的刀头是圆形的,半径在12—15cm左右,两个刀片都为半圆形的;套袋的刀头与采摘刀头是不一样的,设计为可以拖住水果套袋,且要能够自动将套袋口封住;将刀架去掉后可以安装农药喷头进行农药喷洒,执行机构架可作为农药喷洒管的支
撑机构拖住管子。
由该采摘机还可以衍生出其他的水果采摘机,只需要将刀架口和刀头改变一下。
五、总结:
(1)、采用的的思维方法和技巧
#智力激励法:每个发明创造都离不开智力的激励,每个人的智都是有待开发的,做这次创新论文,同样我的智力得到了激发。
刚开始没有一点思路,但是当自己坐下来慢慢想的时候就可以萌生出许多想法,然后再联系实际生活,把想到的东西啊想着把他引用到实际生活中去,看到的东西都可以激发自己的智力,只要好好想。
#类比法:类比法是指用待发明创造的对象与某一具有同一属性的已知事物进行对照类比,以便从中得到启发从而进行发明创造。
以前的水果采摘机品种多,各有千秋,但是相比下来,他们都有一个通病,就是比较笨重和繁琐,用起来不方便,所以自己感觉发明一种简易的水果采摘机是很有必要的。
#设问法:设问法是通过有关问题的形式去发现事物的症结所在并继续发明创造的一类技法。
在此次创造过程中,我多次反问自己。
刚开始就想着他能够采摘水果就可以了,但是最后发现不仅可以采摘水果,还可以实现水果套袋机械化,还在问自己有没有其他的用途,最后发现还可以用来喷洒农药,由当初的单一功能扩展到三个功能。
刚刚开始我想把机器的执行机构架用钢铁做成,后来发现如果用钢铁的话会比较重,所以反思一下其实用硬塑料就可以了。
(2)、体会:
这是一次对我们来说这是一个比较难的任务,因为以前就没有过这么比较专业的论文写作。
从开始想做什么课题就比较难,但是经过冥思苦想,联系生活实际,想出了水果采摘机这一个想法。
从开始背景描述,后面的描述都是比较的难的,但是自己还是通过一步步想,最后将这个任务完成。
通过这次作业,我感觉到科学的严谨和神秘,每一步的计算都要很仔细,一个产品的问世要经过很多的步骤和很多的努力。
同时在这个过程中也锻炼了自己的思维,也是一个应用专业只是解决问题的过程,对自己是一个小的锻炼,对自己以后走上工作岗位也是一个借鉴。
六、参考文献:
1、徐斌,便携式水果分级采摘器的原理及应用。
内蒙:《现代农业科技》2007年第13期
2、卢伟; 宋爱国; 蔡健荣; 孙海波; 陈晓颖,采摘机器人结构设计及运动学算法。
东南大学学报(自然科学版),2011年1月。