击鼓机器人系统设计与实现
《简易机器人机械系统的设计与制作作业设计方案-2023-2024学年高中通用技术地质版2019》
《简易机器人机械系统的设计与制作》作业设计方案第一课时一、项目背景随着科技的发展,机器人技术已经在各个领域得到广泛应用,因此学习机器人的基础知识对于学生来说变得越来越重要。
本作业将引导学生设计并制作一个简易机器人机械系统,以帮助他们理解机器人的工作原理。
二、项目目的1. 帮助学生理解机器人的基本原理和机械系统的设计过程。
2. 培养学生动手实践的能力和创造力。
3. 激发学生对机器人技术的兴趣,培养其未来从事相关职业的潜力。
三、项目内容1. 学生需设计一个简易的机械系统,包括至少两个可运动的零件,并能够通过简单的操控实现特定的动作。
2. 学生需要使用3D建模软件设计机械系统的结构,并选择合适的材料进行制作。
3. 学生需要编写控制程序,实现对机械系统的操控和运动。
4. 学生需在实际制作过程中解决可能出现的问题,并对机械系统进行调试和优化。
四、项目步骤1. 确定机械系统的设计方案,包括结构设计、材料选择和功能要求。
2. 使用3D建模软件制作机械系统的模型,并进行设计验证。
3. 制作机械系统的零部件,并进行组装。
4. 编写控制程序,实现对机械系统的操控。
5. 进行实际测试和调试,优化机械系统的性能。
6. 撰写实验报告,总结设计过程中的经验和教训。
五、项目评估标准1. 设计方案的创意性和实用性。
2. 机械系统的结构完整性和稳定性。
3. 控制程序的实现效果和稳定性。
4. 实际测试结果的准确性和稳定性。
5. 实验报告的内容完整性和表达清晰性。
总结:通过本作业设计,学生将能够在实践中学习到机器人的基本原理和机械系统的设计方法,培养其动手实践和创造力,为将来从事相关职业打下基础。
希望学生们在完成这个项目的过程中能够体验到制作机器人的乐趣,并在不断探索和实践中提升自己的技能和能力。
第二课时一、项目背景随着科技的不断发展,机器人技术已经成为了一个备受关注的领域。
机器人不仅可以在工业生产中发挥巨大作用,还可以被应用于各种领域,如医疗、教育和娱乐等。
打鼓游戏机综合设计报告
打鼓游戏机设计一课题介绍1.1 飞思卡尔S12(X)单片机简介Freescale公司推出的S12、S12X系列单片机是增强型的16位MCU,其集成度高,片内资源丰富,功能模块包括SPI、SCI、I2C、CAN、A/D、PWM、ECT等,方便构建实际应用系统;大容量的Flash、RAM 和EEPROM存储器可满足大部分的存储空间需求,具有的低功耗工作,复位控制,看门狗及实时中断等配置功能更有助于系统的可靠运行;可宽范围选择逻辑时钟频率,最高工作频率达25MHZ/50MHZ;具有方便快捷的在线编程调试能力;具有丰富、高效的指令系统,具有较强的数值运算和逻辑运算能力。
1.2 课题简介本系统是基于S12XDT512SLK核心开发板设计并实现打鼓游戏机。
程序语言采用C语言,编程软件采用CodeWarrior开发环境。
整个系统需要在自己制作的硬件电路上实现。
打鼓游戏机是这样一款游戏:系统随机产生一个鼓点,当鼓点到达基准线时,玩家应该按下相应按键,如果成功按键,系统将实现加分,如果没有成功按键,系统不做处理。
游戏最后以得分高低评判玩家水平。
通常游戏配有背景音乐和鼓声作为前景音乐。
整款游戏集趣味性、挑战性、可观赏性于一体。
我们采用单片机作为控制管理器,通过编程实现不少于四键输入的信息接收,LCD液晶屏显示,前景背景音乐输出,实现打鼓游戏功能。
同时,设计出能完成上述要求的硬件电路,安装制作成实验电路板,调试完成相应的软件功能。
二方案验证2.1硬件方案验证系统采用核心开发板加扩展板的方式。
在核心开发板上主要是S12芯片。
扩展板上主要是12864LCD液晶显示屏、按键、语音芯片、扬声器、LED发光二极管等外围电路。
图1打鼓游戏机系统框图输入/输出(I/O)接口,是单片机与外界进行信息交互的重要通道,在整个单片机系统中占有重要地位。
单片机所处理的信息(包括程序和数据)大都要由输入设备提供,而处理的结果则要通过输出设备输出。
打鼓的机器人课程设计
打鼓的机器人课程设计一、课程目标知识目标:1. 学生能够理解机器人的基本构造,掌握其运动原理;2. 学生能够描述打鼓机器人各部分的名称及功能;3. 学生能够解释编程控制打鼓机器人工作的基本流程。
技能目标:1. 学生能够运用所学知识,设计简单的打鼓程序;2. 学生能够通过实际操作,使打鼓机器人按照预设的程序进行表演;3. 学生能够运用团队协作,共同完成打鼓机器人的搭建和调试。
情感态度价值观目标:1. 培养学生对机器人科技的兴趣,激发其探索未知世界的热情;2. 培养学生勇于尝试、克服困难的精神,增强其自信心;3. 培养学生团队协作意识,提高沟通与交流能力;4. 培养学生关注社会热点问题,将所学知识与实际应用相结合,提高解决实际问题的能力。
课程性质:本课程为跨学科综合实践活动课程,结合了信息技术、音乐、物理等学科知识。
学生特点:五年级学生具有一定的逻辑思维能力和动手操作能力,对新鲜事物充满好奇。
教学要求:注重理论知识与实践操作的相结合,鼓励学生主动探究、合作学习,培养学生创新精神和实践能力。
通过本课程的学习,使学生能够将所学知识应用于实际生活,提高综合素养。
二、教学内容1. 机器人基础知识:介绍机器人的基本构造、分类及运动原理,关联课本第三章“机器人概述”。
2. 打鼓机器人结构与功能:详细讲解打鼓机器人的各部分名称、作用及其相互关系,对应课本第四章“机器人结构与功能”。
3. 编程控制:学习编程软件的使用,掌握基本的编程指令,设计简单的打鼓程序,联系课本第五章“机器人编程”。
4. 机器人搭建与调试:指导学生动手搭建打鼓机器人,学习调试方法,确保机器人按照预设程序进行表演,结合课本第六章“机器人搭建与调试”。
5. 综合实践活动:组织学生进行小组合作,共同完成打鼓机器人的搭建、编程和表演,提高学生的实践能力。
教学内容安排与进度:第一课时:机器人基础知识学习,介绍打鼓机器人的结构与功能;第二课时:编程控制,学习设计简单的打鼓程序;第三课时:机器人搭建与调试,分组进行实践操作;第四课时:综合实践活动,小组合作完成打鼓机器人的搭建、编程和表演。
击鼓机器人系统设计与实现
21 0 0年 1 1月
文 章 编 号 :0 1 3 9 (0 0 1— 1 1 0 1 0 — 9 7 2 1 ) 10 4 — 2
机 械 设 计 与 制 造
M a h nmT De in ci sg & M a ufc u e n a tr 1 41
击鼓 机 器人 系统 设计 与 实现 术
g a ,n r e r a d d um c a i a. h o r l y t m so e mir pr c s o o to y t m c o siu e y o e me h n c 1T e c nto se i n c o o e s rc n r l se whih c n tt t d b n s s
mat n oe aa e sc n ay h o t lne a eh enc m i duigVsa B i l g ae h s e a dm r p rl l eo d r. e nr tr c a be o p l s i l a c a ug. e r l T c oi f s e n u s n T R b t a et m l ete ak gtn d nc ar et gd w f r d h ia ddu mig o o cnb t r o pe s e igo t s a h i g tn n om s a c ar n rm n, ec t h t o t noe s f , i o en
a he e usa d n s h nter e c iv dg ttn igr u si a . e h c
Ke r y wo ds: umm i o Dr ng r bot M e ha S sg Co r y t m ; c nim de i n; nt ols s e
架子鼓机器人说明文档
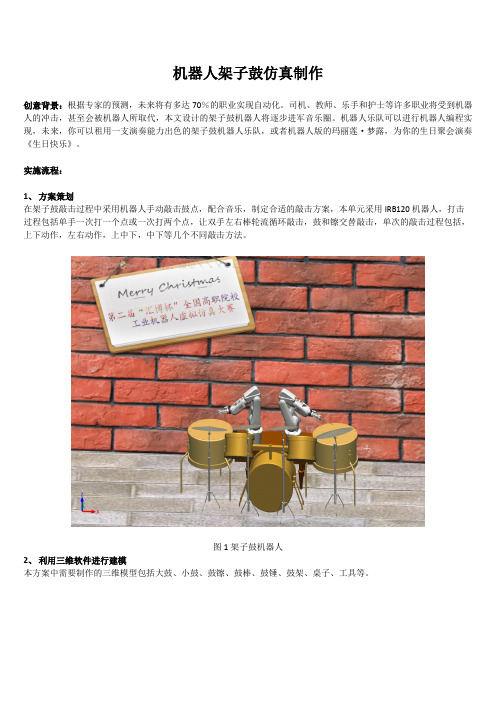
机器人架子鼓仿真制作创意背景:根据专家的预测,未来将有多达70%的职业实现自动化。
司机、教师、乐手和护士等许多职业将受到机器人的冲击,甚至会被机器人所取代,本文设计的架子鼓机器人将逐步进军音乐圈。
机器人乐队可以进行机器人编程实现,未来,你可以租用一支演奏能力出色的架子鼓机器人乐队,或者机器人版的玛丽莲·梦露,为你的生日聚会演奏《生日快乐》。
实施流程:1、方案策划在架子鼓敲击过程中采用机器人手动敲击鼓点,配合音乐,制定合适的敲击方案,本单元采用IRB120机器人,打击过程包括单手一次打一个点或一次打两个点,让双手左右棒轮流循环敲击,鼓和镲交替敲击,单次的敲击过程包括,上下动作,左右动作,上中下,中下等几个不同敲击方法。
图1架子鼓机器人2、利用三维软件进行建模本方案中需要制作的三维模型包括大鼓、小鼓、鼓镲、鼓棒、鼓锤、鼓架、桌子、工具等。
图2鼓、镲、棒模型图3桌子、背景墙模型3、利用RobotStudio搭建机器人工作站导入对应的模型以及机器人,并进行布局,之后创建机器人系统;图4机器人IRB120模型4、利用Smart组件创建动画效果本机器人单元需要的动作效果如下:机器人夹具的动作,能够拾取。
5、编程调试并录制视图示教目标点:鼓1的上、中、下点,鼓2的上、中、下点,镲1的上、中、下点,镲2的上、中、下点鼓3的上、中、下点,鼓4的上、中、下点,镲3的上、中、下点,镲4的上、中、下点;编写轨迹:鼓棒的安装、鼓棒的HOME点设置、鼓棒的上下、左右运动,机器人关节设置等,机器人速度的设置,Z值得设置等;添加逻辑:添加IO控制信号,并设置轨迹运行顺序与逻辑;程序优化:查看机器人运行情况并进行轨迹优化;仿真录像:仿真运行并录制视图;镲4鼓2鼓1鼓4镲1镲3鼓3镲2。
《简易机器人机械系统的设计与制作作业设计方案-2023-2024学年高中通用技术地质版2019》
《简易机器人机械系统的设计与制作》作业设计方案一、设计目标本设计方案旨在帮助学生通过设计与制作简易机器人机械系统,提高他们的动手能力、创造力和解决问题的能力。
通过这个项目,学生将学会如何设计机械系统、应用各种工具和材料进行制作,并了解机器人的基本原理。
二、设计内容1. 机械系统设计:学生将根据指定的要求和材料,设计一个简易的机器人机械系统。
设计要求包括机器人的外形、功能、运动方式等。
2. 材料准备:学生将根据设计要求准备所需的材料,包括木材、金属零件、电子元件等。
3. 制作过程:学生将按照设计图纸和制作步骤,应用各种工具进行机械系统的制作。
制作过程中需要注意安全和细节。
4. 调试测试:学生完成机械系统的制作后,需要进行调试测试,确保机器人可以正常运行并完成指定的功能。
三、设计步骤1. 确定设计要求:学生根据指导老师提供的设计要求,确定机器人的外形、功能和运动方式。
2. 设计图纸绘制:学生根据设计要求,绘制机器人的设计图纸,包括各个零部件的尺寸、位置和毗连方式。
3. 材料准备:学生根据设计图纸,准备所需的材料和工具,包括木板、螺丝、螺母、电机等。
4. 制作组装:学生根据设计图纸和制作步骤,应用工具将各个零部件组装起来,制作成一个完备的机器人机械系统。
5. 调试测试:学生完成机械系统的制作后,进行调试测试,检查机器人的运行情况和功能是否正常。
四、评判标准1. 设计创意:机器人的设计是否符合要求,是否具有创意和奇特性。
2. 制作质量:机器人的制作质量是否高,是否符合设计要求。
3. 功能完备:机器人是否可以正常运行并完成指定的功能。
4. 安全性:机器人的制作过程和应用过程是否安全。
五、总结通过本项目标设计与制作,学生将能够提高他们的动手能力和创造力,了解机器人的基本原理,培养他们的解决问题的能力。
希望学生能够在这个项目中获得成长和收获,为未来的进修和工作打下坚实的基础。
机器人打鼓弹琴教案
机器人打鼓弹琴教案在当今科技发达的时代,机器人已经成为了我们生活中不可或缺的一部分。
除了在工业领域中发挥着重要作用外,机器人还在音乐领域展现出了惊人的才能。
今天,我们将介绍一些关于机器人打鼓弹琴的教案,帮助您了解机器人在音乐表演中的应用。
首先,让我们来看看机器人打鼓的教案。
打鼓是一项需要高度协调和节奏感的技能,对于机器人来说也是一项不小的挑战。
然而,随着科技的进步,现在已经有许多机器人能够完成精准的鼓点击打,甚至可以进行复杂的鼓点组合演奏。
在教学过程中,我们可以通过编程和传感器技术来训练机器人的鼓技能。
首先,我们需要为机器人安装鼓套件,并编写程序来控制机器人的击打动作。
接着,我们可以通过传感器来实时监测机器人的击打效果,从而对机器人进行调整和训练。
通过反复的训练和调整,机器人可以逐渐掌握各种鼓点技巧,最终实现高水平的鼓技表演。
接下来,让我们来看看机器人弹琴的教案。
与打鼓相比,弹琴对机器人的要求更加复杂,因为弹琴需要机器人具备更高的手指灵活性和音乐表现力。
在教学过程中,我们可以通过机械臂和传感器技术来训练机器人的弹琴技能。
首先,我们需要为机器人安装琴键和琴弦,并编写程序来控制机器人的手指动作。
接着,我们可以通过传感器来实时监测机器人的弹奏效果,从而对机器人进行调整和训练。
通过反复的训练和调整,机器人可以逐渐掌握各种琴键组合和弹奏技巧,最终实现高水平的弹琴表演。
除了单独的打鼓和弹琴教案外,我们还可以将机器人打鼓和弹琴结合起来,进行更加综合的音乐表演教学。
通过编写复杂的程序和精准的传感器监测,我们可以让机器人在打鼓和弹琴之间实现无缝切换,从而完成更加丰富多彩的音乐表演。
在教学过程中,我们可以引导学生编写机器人音乐表演的程序,从而培养他们的编程能力和音乐表演能力。
通过这样的教学方式,学生不仅可以学习机器人技术,还可以锻炼自己的音乐表演技能,实现技术与艺术的完美结合。
总的来说,机器人打鼓弹琴教案是一项极具挑战和创新性的教学内容。
《简易机器人机械系统的设计与制作作业设计方案-2023-2024学年高中通用技术地质版2019》
《简易机器人机械系统的设计与制作》作业设计方案一、设计目标本次作业设计旨在帮助学生掌握机器人机械系统设计与制作的基本原理和技能,培养学生的动手能力和创造力,提高学生的工程实践能力和解决问题的能力。
二、设计内容1. 机器人机械系统的设计原理介绍:介绍机器人机械系统的基本组成部分和工作原理,包括机械结构、传动系统、控制系统等。
2. 设计方案的确定:学生根据设计要求和实际情况确定机器人机械系统的设计方案,包括机器人的结构设计、传动系统设计、控制系统设计等。
3. 制作过程的实施:学生按照设计方案,利用各种材料和工具进行机器人机械系统的制作,包括机械结构的搭建、传动系统的组装、控制系统的调试等。
4. 实验结果的测试:学生对制作的机器人机械系统进行测试和调试,检验其性能和稳定性,对测试结果进行分析和总结。
三、设计步骤1. 确定设计要求和目标:明确机器人机械系统的设计要求和目标,包括机器人的功能、性能指标、外形尺寸等。
2. 进行设计方案的初步构想:根据设计要求和目标,进行机器人机械系统的初步构想,确定机器人的结构形式、传动方式、控制方式等。
3. 设计方案的详细制定:对初步构想的设计方案进行详细制定,包括机械结构的设计、传动系统的设计、控制系统的设计等。
4. 制作机器人机械系统:根据设计方案,利用各种材料和工具进行机器人机械系统的制作,包括机械结构的搭建、传动系统的组装、控制系统的调试等。
5. 进行实验测试和分析:对制作的机器人机械系统进行测试和调试,检验其性能和稳定性,对测试结果进行分析和总结,找出存在的问题和改进的方向。
四、设计要求1. 设计方案的合理性:设计方案应符合机器人机械系统的实际要求和目标,具有可行性和实用性。
2. 制作过程的规范性:制作过程应按照设计方案进行,注意安全和效率,保证机器人机械系统的质量和稳定性。
3. 实验结果的准确性:实验测试应准确可靠,结果应符合设计要求和目标,对测试结果进行客观分析和总结。
武术擂台仿人机器人系统及电路设计本科毕业设计论文
毕业设计(论文)武术擂台仿人机器人系统及电路设计武术擂台仿人机器人系统及电路设计摘要本文围绕武术擂台仿人机器人的设计,从中国机器人大赛武术擂台赛比赛规则入手,分析合理的比赛策略,系统地介绍了武术擂台仿人机器人的硬件与软件构成、技术特点以及战术策略等方面的内容,主要包括硬件设计、决策系统以及干扰与抗干扰措施。
该仿人机器人结构设计巧妙,可以通过简单的动作完成仿人形态到车形态的变形,从而有效降低重心。
机器人共有7个自由度,整体重量4.19kg,高40cm,底部投影尺寸30cm*30cm,符合比赛要求。
底盘骨架采用4mm*4mm*3mm镂空角铝连结,四壁采用0.8mm不锈钢板包围,结构有一定的刚性,经测试可以抵抗进攻和防守中发生的激烈冲撞。
传感器部分采用了红外开关与红外测距传感器相配合。
自行设计以Mega128为核心的通用小型机器人控制器。
该控制器板载5V3A开关电源,具有RS232以及RS422总线接口,具有数字舵机接口以及模拟舵机接口,并且有设备过流保护、电源过压、欠压保护等功能。
经测试,该仿人机器人运行稳定,有较好的攻击、防御能力。
关键词:机器人武术擂台赛;仿人机器人;AVR单片机Combat Humanoid Robot System andCircuit DesignAbstractThis article around the humanoid robot design, start from robot competition from Chinese robot competition rules, discuss the reasonable strategy, systematic introduction to the combat robot hardware and software, the technical characteristics and tactical strategies and other aspects, including hardware design, decision-making system and the interfere and anti-interference measures.With ingenious design of structure, the robot can simply form humanoid to vehicle deformation, and thus reduce the center of gravity. This robot has total of seven degrees of freedom, weight 4.19kg, high 40cm, and the bottom of the projection size 30cm*30cm, which is with the competition requirements. Chassis frame with 4mm*4mm*3mm hollow aluminum link 0.8mm stainless steel plate surrounded, the structure has some rigidity, were resistant to attack and defense in the fierce clash.IR switchers and IR distance sensors were compatible built in.The controller using Atmel's Mega128, which onboard 5V3A Switching Power Supply. The controller have RS422 and RS232 bus interface, and the RC and digital servo interfaces, while has over-current protection, Power supply over voltage, under voltage protection.The testing experiments show that, the humanoid robot is stable, and has good attack and defense capabilities.Keyword: combat robot competition; humanoid robot; A VR MCU目录1 绪论 (1)1.1机器人武术擂台赛背景 (1)1.2机器人武术擂台赛介绍 (1)1.3机器人武术擂台赛竞赛环境 (2)1.4本设计的意义及应用 (2)2 竞赛策略 (3)2.1规则分析 (3)2.2设计目标 (3)2.3应战策略 (4)2.3.1 登上擂台 (4)2.3.2将棋子推下擂台 (4)2.3.3 将敌方推下擂台 (4)2.3.4 避免被敌方推下擂台。
EV3打鼓机器人教案
完整程序展示如下:
上左
上右
第 二行程序
程序详解如下: 程序开始进入循环执行模块,当机器人的眼睛(超声波传感器)看到有人时就开始打鼓,左手打
一下后播放打鼓声音,右手打一下后播放打鼓声音,再双手一起打。
反思
注意电机的旋转角度
延续
实现更多种的打击方式。
效果评价
本节课我们主要是超声波传感器和两个大型单机组合使用。搭建一个人形结构实现打鼓的效果, 打鼓要有 3 种以上的打击方式。
18、打鼓机器人
学习目标
4. 超声波传感器的应用,双点击的应用
关键词
两个大型电机,一个超声波传感器
所需材料
9797 套装 电脑
课前准备
准备的图片
联系
小朋友你们知道的鼓有几种?拨浪鼓、架子鼓、中国大鼓、腰鼓、手鼓 鼓是如何发出声音的?共振
建构
搭建主体展示图
搭建细节图:
编程目标
制作打鼓机器人,实现 3 中以上的打击方式。
重点:人形机器人的搭建 难点:
虚拟击鼓游戏的设计与开发
Import viz
加载鼓槌模型
viz.add(‘stick1.wrl’) viz.add(‘stick2.wrl’)
加载架子鼓模型
viz.add(‘drum.wrl’)
加载碰撞面模型
viz.add(‘drum1’)
改变模型到合适大小
setScale( )
初始化位置
translate()
加 入 模 型 后 的 效 果 图
总结
论文总结
1、系统框架设计 2、程序功能模块的组织与设计 3 3、各个模块的详细算法 4、模型、音频文件的制作和场景、视角的优化
存在的问题和未来的工作
1、完善碰撞效果,碰撞后切断跟踪 2、用更简便的方法分离鼓面模型 3、实现鼓被击打的振动效果
单 独 显 示 碰 撞 面 的 效 果 图
加载跟踪器
sensor = viz.add( ‘fastrak.dls' ) sensor2 = viz.add( ‘fastrak.dls' )
跟踪器与虚拟物体交互
def onTimer(num): pos = sensor.getPosition() euler = sensor.getEuler() ds1.setPosition(pos[0]*4,pos[1]*4,pos[2]*4) ds1.setEuler(euler) viz.callback( viz.TIMER_EVENT, onTimer ) viz.starttimer( 0, 0.1, viz.FOREVER )
系统设计
输入 FASTRAK6 自 由 度跟踪器 交互逻辑 用相关函数得到 坐标,捕获数据 输出 虚拟鼓槌的移动 输出
传递数据
关键模块
模 关 键 模 块
助力器机器人系统的设计与实现
助力器机器人系统的设计与实现随着科技的不断进步,机器人已经成为人们生活和工作中不可或缺的一部分。
在日常生活中,我们可以看到家居清洁机器人、智能语音助手等辅助设备的广泛应用;在工业制造中,机器人已经代替人类完成重复性、危险性较高的工作。
助力器机器人系统作为一种特殊的机器人,能够帮助人们完成一些特殊的任务,比如搬运重物、支撑身体等。
本文将对助力器机器人系统的设计与实现进行探讨。
一、设计要点助力器机器人系统的设计目的是为了辅助人类,因此设计的重点就是“人性化”。
首先,应该考虑助力器机器人的整体外形是否符合人体工学原理,这可以保证机器人在长时间使用过程中,对人体产生最小的影响。
其次,机器人应该尽量简单易用,无需过多的学习和培训即可上手操作。
最后,机器人应该尽可能地与人类交互,实现与人类的无缝连接。
在设计中还需要考虑机器人的性能和功率等指标。
机器人的性能指标包括最大运行速度、承载能力、动力系统等,这些指标决定了机器人是否能够完成对应的任务。
如果机器人需要搬运重物,那么它的承载能力就必须足够;如果机器人需要长时间工作,那么它的动力系统就必须稳定可靠。
此外,机器人需要考虑适应不同环境的能力,比如它需要在户外工作还是在室内工作,机器人的适应能力都需要有所不同。
二、实现方式助力器机器人系统的实现方式主要包括机械结构、传感器、控制器等方面。
机械结构是机器人外形的实现方式,它包括了机器人的骨架结构、连接方式、外形设计等。
传感器可以帮助机器人获取周围环境的信息,从而实现更加精准的操作。
控制器则可以实现对机器人的操作和动作的控制。
在机械结构方面,需要考虑机器人的外形设计和骨架结构。
为了符合人体工学原理,机器人的形态需要与人体身材相似,保证使用者的舒适度。
骨架结构则需要保证机器人整体结构的稳定,避免工作过程中出现机械结构损坏等问题。
传感器是机器人获取周围信息的重要方式。
例如,在机器人需要搬运重物的时候,传感器可以帮助机器人检测到重物的位置和重量,从而实现对物品的精准抓取和落地。
基于多线程技术的击鼓机器人单片机电气控制系统
基于多线程技术的击鼓机器人单片机电气控制系统
徐英凯;林晖
【期刊名称】《机械》
【年(卷),期】2011(038)008
【摘要】为了参加机器人大赛展示组比赛,设计并制作出击鼓机器人.击鼓机器人是一个具有5个自由度的机器人,由3个电机驱动,能够实现击鼓的功能.机械臂本体由铝合金制作,底座由有机玻璃制作,控制电路分为主控制电路与子控制电路,主控制电路为单片机开发板及其配套系统,子控制电路为声音与触感示教系统.机器人有整体电路及单片机控制电路,通过离线编程设计可以根据预先设定的程序击鼓,通过示教系统设计可以根据人现场示教击鼓.多线程技术在击鼓机器人单片机电气控制系统得到了应用.该机器人具有展示性、娱乐性强的特点.
【总页数】4页(P75-78)
【作者】徐英凯;林晖
【作者单位】南京航空航天大学理学院,江苏南京211106;沙洲职业工学院,江苏张家港215600
【正文语种】中文
【中图分类】TP241.3
【相关文献】
1.开关柜电气磨合微机控制系统中多线程技术的应用 [J], 王瀚漓;汪雄海
2.基于多线程技术的3R机器人控制系统 [J], 贾立山;王立文;邢志伟;韩俊伟
3.基于ATMega16单片机的体操机器人控制系统设计 [J], 汪倩倩;汤煊琳
4.基于AVR单片机的矿井救援机器人控制系统设计 [J], 刘艳峰;陈维铅;章慧成
5.基于AT89C52单片机的搬运机器人控制系统设计 [J], 龙晓莉;谢斌盛;陈新兵;李卫平
因版权原因,仅展示原文概要,查看原文内容请购买。