控制电机调速及matlab仿真
基于Matlab的直流电机弱磁调速系统仿真
毕业设计 (论文)课题:基于Matlab的直流电机弱磁调速系统仿真学院:机械与电气工程学院学生姓名:XXXXXXXXX 学号:XXXXXXXXXXXX 专业班级:XXXXXXXXXXXXXXX 指导老师: XXXXXXXXX 完成时间:XXXXXXXXX摘要直流电动机的调速性能好,启动转矩大,特别是调速性能为交流电机所不及。
因此,在对电动机的调速性能和启动性能要求比较高的生产机械上,大都使用直流电动机进行拖动。
而通过减小直流电动机励磁磁通的方法对直流电动机调速,不仅调速过程平滑,可控制性高,而且能量损耗小,成本低,被广泛应用于恒功率调速场合。
Matlab是一种科学计算软件,利用其Simulink仿真环境可以很方便的对各类系统进行仿真。
利用matlab进行电机仿真有很多优点。
第一、能够大大提高实验过程当中的安全性;第二、搭建仿真模型操作简单,修改各参数方便快捷,在今后电动机的改良及系统的设计中可以大大缩短设计开发周期,有利于选择最佳参数和设计最合理的系统方案;第三、仿真结果通过Simulink模块当中示波器显示其曲线变化,这样可以更为直观的观察到各参数对电动机性能的影响,对电动机的研究带来了极大的方便。
本文使用Simulink仿真环境中的各类模块,组成直流电动机弱磁调速控制系统。
通过改变励磁磁通量,可以得到电机在不同条件下的运行参数。
经过对仿真结果进行分析,对弱磁调速特点进行了验证。
关键词:直流电机;弱磁调速;Matlab仿真;SimulinkAbstractDC motor‘s speed performance and starting torque is higher than AC motor。
Therefore DC motor has been widely applied in the in many demanding occasions.The design is electric machinery simulation experiment based on MATLAB. Firstly, we sh ould learn to study the internal structure and principle of operation of the electric machiner y. Secondly, it is the learning of the MATLAB software. To build up a simulation model we need to use the Simulink module to build up different type and capacity motors’ starting, s peed regulation and braking module by Simulink module, then simulate the curves of the p arameters.The simulation of the motor plays an important role in studying the electric machinery. By buildi ng up the models to simulate the variety of the motors’starting,speed regulation and braking curves. Firstly, we can greatly improve the safety during the process of the experiment. Secondly, it is easy to build up a simulation model and convenient to modify the parameters, so we can greatly shorten the design cycle in the future motor improvement and system design and it is propitious to select optimum parameters and design the most reasonable system scheme. Thirdly, the simulation results is used by oscilloscope in Simulink modules to display theirs’ curves variety, in this way we can intuitionisticly observe the effects of parameters on the performance of the motors, it brings great convenience in motor research.KeyWords:DC motor; Matlab; Speed regulation with Field weakening;Simulink目录摘要 (2)Abstract (3)1 绪论 (5)1.1课题研究的目的和意义 (5)1.2论文的主要研究内容 (5)2 直流电动机 (6)2.1 直流电动机的基本工作原理 (6)2.2直流电机的励磁方式 (7)2.3直流电动机相关公式 (8)3 弱磁调速系统 (9)3.1他励直流电动机的机械特性 (9)3.1.1他励直流电动机的机械特性 (9)3.1.2固有机械特性 (10)3.1.3人为机械特性 (10)3.2他励直流电动机的调速 (13)3.2.1调速指标 (13)3.2.2 调速方法 (14)3.3 他励直流电动机弱磁调速系统概述 (16)4 Matlab概述 (17)4.1 Matlab简介 (17)4.2 Simulink的应用 (18)4.2.1 简介 (18)4.2.2 功能 (18)4.2.3 启动方法 (19)5 直流电机弱磁调速仿真 (19)5.1 设计思路及模块介绍 (19)5.1.1设计思路 (19)5.1.2模块介绍 (19)5.2 在simulink上建立仿真模型 (21)5.3仿真结果及分析 (25)5.3.1 仿真结果 (25)5.3.2 结果分析 (27)5.4 弱磁控制的直流调速系统 (27)6 总结 (29)致谢 (30)参考文献 (30)附录(中英文翻译) (31)外文资料 (31)中文翻译 (36)1 绪论1.1课题研究的目的和意义在国民经济生产中,电机工业是机械工业的一个重要组成部分,电机是机电一体化中机和电的结合部位,是机电一体化的重要基础,电机可称为电气化的心脏。
直流电机调速matlab仿真报告
直流电机调速matlab仿真报告以直流电机调速Matlab仿真报告为标题引言:直流电机是一种常见的电动机,广泛应用于工业、交通、家电等领域。
在实际应用中,电机的调速控制是一项关键技术,可以使电机在不同工况下实现恒定转速或变速运行。
本文将利用Matlab软件进行直流电机调速的仿真实验,旨在通过仿真结果分析不同调速控制策略的优劣,并提供一种基于Matlab的直流电机调速方法。
一、直流电机调速原理直流电机的调速原理基于电压与转速之间的关系。
电机的转速与输入电压成正比,即在给定电压下,电机转速可以通过调整电压大小来实现调速。
常用的直流电机调速方法有电压调速、电流调速和PWM调速等。
二、Matlab仿真实验设置本次仿真实验将以直流电机调速为目标,基于Matlab软件进行实验设置。
首先,需要建立电机的数学模型,包括电机的转速、电流和电压等参数。
其次,选择合适的调速控制策略,如PID控制、模糊控制或神经网络控制等。
最后,通过调节电压输入,观察电机的转速响应和稳定性。
三、PID控制调速实验1. 实验目的本实验旨在通过PID控制器对直流电机进行调速控制,并分析不同PID参数对控制效果的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计PID控制器,包括比例系数Kp、积分系数Ki和微分系数Kd;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节PID参数,观察电机的转速响应和稳定性。
3. 实验结果与分析根据实验设置,我们分别对比了不同PID参数值下的电机转速响应曲线。
结果显示,在合适的PID参数设置下,电机能够实现快速响应和稳定控制。
但是,过大或过小的PID参数值都会导致转速超调或调速不稳定的问题。
四、模糊控制调速实验1. 实验目的本实验旨在通过模糊控制器对直流电机进行调速控制,并分析不同模糊规则和输入输出的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计模糊控制器,包括模糊规则、输入变量和输出变量;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节模糊规则和输入输出变量,观察电机的转速响应和稳定性。
基于MATLAB的异步电机变频调速系统的仿真与分析

基于MATLAB的异步电机变频调速系统的仿真与分析1.引言随着工业自动化水平的不断提高,对电机变频调速系统的要求也越来越高。
异步电机是目前工业中最为常见的一种电机类型,其变频调速系统在工业生产中发挥着至关重要的作用。
通过变频调速系统,可以实现电机的精确控制和能耗优化,提高生产效率和降低运行成本。
对异步电机变频调速系统进行仿真与分析,对于工业生产具有重要意义。
MATLAB是一款功能强大的技术计算软件,具有丰富的工具箱和仿真功能,可以方便地进行电机系统的建模和仿真分析。
本文将基于MATLAB对异步电机变频调速系统进行仿真与分析,探讨其性能特点和优化方法。
2.异步电机变频调速系统的基本原理异步电机的变频调速系统是通过改变电机的输入频率和电压,从而控制电机的转速和转矩。
基本原理是利用变频器对电源进行调节,改变电机的供电频率和电压,以实现对电机转速的精确控制。
在变频调速系统中,一般采用闭环控制结构,通过反馈电机转速信息,控制变频器的输出频率和电压,从而实现对电机的精确控制。
还需要考虑电机的负载特性和动态响应特性,以保证系统稳定性和性能优化。
在MATLAB中,可以利用Simulink工具箱进行异步电机变频调速系统的建模。
首先需要建立电机的数学模型,包括电机的电气特性、机械特性和传感器特性等。
然后,在Simulink中建立闭环控制系统模型,包括电机模型、变频器模型和控制器模型等。
通过建立完整的系统模型,可以对异步电机变频调速系统进行仿真分析。
可以通过改变输入信号和参数,观察系统的动态响应和稳定性能,进而优化系统的控制策略和调速性能。
4.仿真与分析通过MATLAB对异步电机变频调速系统进行仿真与分析,可以得到系统的各项性能指标和特性曲线。
其中包括电机的转速-转矩特性曲线、电机的效率曲线、系统的响应时间和稳定性能等。
在仿真过程中还可以考虑不同的工况和负载情况,对系统进行多种工况的分析和评估。
通过对系统性能的综合分析,可以得到系统的优化方案和改进措施,提高系统的控制精度和能效性能。
比例积分控制的直流调速系统matlab仿真文件
比例积分控制的直流调速系统matlab仿真文件比例积分控制的直流调速系统是一种控制直流电机转速的方法,这种方法可以通过调整比例和积分控制器的参数来实现对电机转速的精确控制。
在实际应用中,比例积分控制的直流调速系统被广泛应用于工业生产、交通运输等领域。
为了实现比例积分控制的直流调速系统的仿真,我们可以使用MATLAB软件进行仿真模拟。
下面是一个比例积分控制的直流调速系统MATLAB仿真文件的实现过程。
首先,我们需要定义一个直流电机模型。
在MATLAB中,可以使用如下代码来定义一个电机模型:```MATLABJ = 0.01;b = 0.1;K = 0.01;R = 1;L = 0.5;s = tf('s');P_motor = K/((J*s+b)*(L*s+R)+K^2);```其中,J、b、K、R、L分别表示电机的转动惯量、阻尼系数、电动势系数、电阻和电感,P_motor表示电机传递函数。
接下来,我们需要定义一个比例积分控制器模型。
在MATLAB中,可以使用如下代码来定义一个控制器模型:```MATLABKp = 0.5; % 比例系数Ki = 0.2; % 积分系数C = pid(Kp, Ki);```其中,Kp和Ki分别表示比例系数和积分系数,C表示控制器传递函数。
然后,我们需要将电机模型和控制器模型进行连接。
在MATLAB中,可以使用如下代码将其进行连接:```MATLABsys_cl = feedback(C*P_motor,1);```其中,sys_cl表示闭环系统的传递函数。
接下来,我们需要设置仿真参数,并运行仿真程序。
在MATLAB中,可以使用如下代码来设置仿真参数:```MATLABt = 0:0.01:10;r = 0.2*ones(size(t));```其中,t表示仿真时间,r表示输入信号。
然后,我们可以运行仿真程序并绘制输出结果。
在MATLAB中,可以使用如下代码来运行仿真程序并绘制输出结果:```MATLAB[y,t,x] = lsim(sys_cl,r,t);plot(t,r,'b',t,y,'r');xlabel('Time (sec)');ylabel('Speed (rad/sec)');title('DC Motor Speed Response');legend('Input','Output');```以上代码将输出仿真结果图像,其中蓝色曲线表示输入信号,红色曲线表示输出信号。
基于MATLAB的直流电机双闭环调速系统的设计与仿真
基于MATLAB的直流电机双闭环调速系统的设计与仿真直流电机双闭环调速系统是一种常见的控制系统,常用于工业生产中对电机速度的精确控制。
本文将基于MATLAB软件进行直流电机双闭环调速系统的设计与仿真,包括系统设计、参数设置、控制策略选择、系统仿真以及性能分析等方面。
文章将以1200字以上的篇幅进行详细阐述。
一、系统设计直流电机双闭环调速系统由速度环和电流环构成。
速度环控制系统的输入为速度设定值和电机实际速度,输出为电机期望电压;电流环控制系统的输入为速度环输出的电压和电机实际电流,输出为电机实际电压。
通过控制电机的期望电压和实际电压,达到对电机速度的调控。
二、参数设置在进行系统仿真之前,需要确定系统中各个参数的值。
包括电机的额定转矩、额定电压、电感、电阻等参数,以及控制环节的比例增益、积分增益、微分增益等参数。
这些参数的选择会影响系统的稳定性和动态性能,需要根据实际情况进行调整。
三、控制策略选择常见的控制策略包括PID控制、PI控制、PD控制等。
在直流电机双闭环调速系统中,可以选择PID控制策略。
PID控制器由比例环节、积分环节和微分环节组成,可以提高系统的稳定性和响应速度。
四、系统仿真在MATLAB中进行直流电机双闭环调速系统的仿真,可以使用Simulink模块进行搭建。
根据系统设计和参数设置,搭建速度环和电流环的控制器,连接电机实际速度和电机实际电流的反馈信号,输入速度设定值和电机期望电流,输出电机期望电压。
通过仿真可以得到系统的动态响应曲线,评估系统的性能。
五、性能分析在仿真结果中,可以分析系统的静态误差、超调量、调整时间等指标,评估系统的控制性能。
通过参数调整和控制策略更改等方式,可以优化系统的控制性能,使系统达到更好的调速效果。
总结:本文基于MATLAB软件对直流电机双闭环调速系统进行了设计与仿真。
通过系统设计、参数设置、控制策略选择、系统仿真以及性能分析等步骤,可以得到直流电机双闭环调速系统的动态响应曲线,并通过参数调整和控制策略更改等方式,优化系统的控制性能。
异步电机调压调速系统的matlab仿真代码

异步电机调压调速系统的matlab仿真代码异步电机是一种常见的电动机类型,广泛应用于各个领域的工业控制系统中。
在工业生产中,对异步电机的调压调速系统进行仿真设计可以帮助工程师们更好地理解电机的工作原理,并且优化控制算法,提高电机的性能和效率。
本文将根据异步电机调压调速系统的需求,介绍如何使用Matlab进行仿真设计。
异步电机调压调速系统主要包括三个部分:电机模型、调速控制器和电源电压。
首先,我们需要建立电机的模型。
在Matlab中,我们可以使用Simulink来搭建电机模型。
在搭建电机模型之前,我们需要明确电机的参数,例如额定功率、额定转速、定子电阻、定子电感、转子电阻、转子电感等。
根据这些参数,我们可以使用Simulink中的“Synchronous Machine”模块来搭建电机模型。
通过调整模块的参数,我们可以设定电机的额定功率和转速。
此外,我们还可以通过添加噪声、扰动等,模拟电机在实际工况下的运行情况。
接下来,我们需要设计调速控制器。
常见的调速控制算法有PID控制、模糊控制、自适应控制等。
在Matlab中,我们可以使用Simulink中的“PID Controller”模块来实现PID控制算法。
在使用PID控制器模块之前,我们需要根据电机的特性调整控制器的参数,例如比例系数、积分时间和微分时间。
通过不断调整参数和观察仿真结果,我们可以优化控制器的性能,实现电机的稳定调速。
最后,我们需要模拟电源电压对异步电机的影响。
在实际应用中,供电电压的波动会对电机的转速和输出功率产生影响。
在Matlab中,我们可以通过添加波动的直流电压源来模拟这种影响。
通过调整电压源的幅值和频率,我们可以观察电压波动对电机转速和输出功率的影响。
这对于调压调速系统的设计和优化非常重要。
在完成上述步骤后,我们可以对整个异步电机调压调速系统进行仿真。
通过控制器和电源电压的输入,我们可以观察电机的转速、输出功率和电流等参数的变化情况。
matlab直流电动机调速系统仿真实训心得
一、概述在现代工业生产中,直流电动机广泛应用于各种设备和机械中,其调速控制系统的稳定性和性能直接影响到整个生产线的效率和质量。
为了提高学生的实践操作能力和掌握直流电动机调速系统的原理和方法,我校开设了相关的仿真实训课程。
在本次实训中,我主要使用Matlab 软件,进行了直流电动机调速系统的仿真实验,获得了丰富的经验和收获,现将心得体会整理如下。
二、理论基础1. 直流电动机调速原理直流电动机调速系统是通过调节电动机的电流或电压来实现转速的调节。
常用的调速方法包括电阻调速、调速励磁和PWM调速等。
2. Matlab在仿真中的应用Matlab是一种功能强大的科学计算软件,广泛用于工程技术领域。
其仿真环境和信号处理工具箱可以方便地进行电机控制系统的建模和仿真。
三、实训内容与步骤1. 系统建模我根据直流电动机的特性和调速原理,进行了系统的建模工作。
通过Matlab的Simulink工具,搭建了直流电动机的数学模型,包括电动机的等效电路、控制系统和负载模型等。
2. 参数设置与仿真在建立完毕电机系统模型后,我对电机的各项参数进行了设置,包括额定转速、额定电流、负载惯量等。
利用Matlab进行了系统的仿真实验,观察了不同调速方法对电机性能的影响。
3. 实验结果分析通过对仿真实验数据的分析,我发现了不同调速方法的优缺点,比较了电机在不同负载和控制参数下的性能表现,提出了一些改进和优化控制策略的建议。
四、心得体会与经验总结1. 对仿真实验的认识通过本次实训,我深刻体会到仿真实验的重要性。
在实际工程中,通过仿真可以事先评估系统设计的合理性,降低试错成本,提高工程质量。
2. 对Matlab的认识与应用Matlab作为工程领域的标准软件之一,其强大的建模和仿真能力为工程师提供了便利。
在实训中,我更加熟练地掌握了Matlab的使用技巧,对其在电机控制系统仿真中的应用有了更深刻的理解。
3. 对直流电动机调速系统的认识通过本次实训,我对直流电动机调速系统的原理和方法有了更加深入的了解,认识到了控制系统设计和参数调节对电机性能的影响,为今后的工程实践打下了坚实的基础。
异步电机调压调速系统的matlab仿真代码

异步电机调压调速系统的matlab仿真代码一、引言异步电机调压调速系统是工业控制领域中的一个重要研究方向,其应用范围广泛,包括电动汽车、风力发电等。
本文将介绍异步电机调压调速系统的matlab仿真代码。
二、异步电机模型1. 模型简介异步电机是一种常见的交流电动机,其转子和定子之间没有直接的电连接。
异步电机的转速受到供电频率和负载转矩的影响。
在matlab中,可以使用simscape库中的Asynchronous Machine模块来建立异步电机模型。
2. 建立模型在matlab中,打开simscape库并选择Asynchronous Machine模块。
将该模块拖入工作区,并设置参数,如额定功率、额定转速等。
然后连接输入端口和输出端口以完成建模。
三、PID控制器设计1. 控制器简介PID控制器是一种常见的反馈控制器,通过比较设定值和实际值之间的差别来计算控制信号。
在matlab中,可以使用Control System Toolbox库中的PID Controller对象来设计PID控制器。
2. 设计方法首先需要确定调节参数Kp、Ki和Kd。
可以使用试错法或者自适应控制方法来确定这些参数。
然后在matlab中使用PID Controller对象,并设置控制器参数。
四、调压调速系统仿真1. 系统简介异步电机调压调速系统是由异步电机、PID控制器和电源等组成的一个闭环控制系统。
其目的是通过控制电机的转速和电压来实现负载转矩的精确控制。
2. 仿真方法在matlab中,可以使用Simulink库来建立异步电机调压调速系统模型。
将异步电机模型和PID控制器模型连接起来,并添加输入信号和负载转矩信号。
然后运行仿真,并分析结果。
五、总结本文介绍了异步电机调压调速系统的matlab仿真代码,包括建立异步电机模型、设计PID控制器以及建立闭环控制系统模型并进行仿真。
这些内容对于工业控制领域的研究和应用具有重要意义。
基于MATLAB的异步电机变频调速系统的仿真与分析
基于MATLAB的异步电机变频调速系统的仿真与分析摘要:本文利用MATLAB软件对异步电机变频调速系统进行仿真与分析,通过建立模型、设计控制策略和进行性能评估,探讨了异步电机的调速系统在不同工况下的动态特性。
通过仿真分析,可以更好地理解异步电机的变频调速系统的工作原理和特性,并为实际应用提供理论参考。
一、引言异步电机是工业生产中常见的电动机之一,其主要应用在风机、水泵、输送带等设备中。
传统的异步电机是由交流电源直接供电,转速固定。
为了满足不同工况下的需求,提高系统的控制性能,现在常常采用变频调速技术来实现异步电机的调速。
变频调速系统可以通过改变电机的输入频率,来调节电机的转速和输出功率,实现对系统的精准控制。
二、异步电机变频调速系统的建模1. 异步电机的数学模型异步电机可以理解为一个轴对称的旋转电机,其运动方程可以简化为以下形式:\[T_{\text {电 }}=T_{\text {m机 }}-T_{\text {负载 }}-T_{\text {摩擦阻力 }}=J \cdot \frac{d \omega}{d t}\]T电表示电机的电磁转矩,Tm机表示电机的机械转矩,T负载表示负载转矩,T摩擦阻力表示摩擦转矩,J表示转动惯量,ω表示电机的角速度。
2. 变频调速系统的控制策略变频调速系统的控制策略一般包括速度闭环控制和电流矢量控制两部分。
速度闭环控制采用PID控制器,通过测量电机转速与给定转速进行比较,调节输出电压的频率和幅值,使电机实现闭环控制。
电流矢量控制则是根据电机的电流矢量和磁链方向,控制电机的输出电压和频率,实现对电机的精准控制。
3. 系统的建模与仿真为了进行仿真分析,需要建立异步电机变频调速系统的数学模型。
在MATLAB中,可以使用Simulink工具箱来进行建模。
通过搭建电机模型、控制算法和运动方程,可以建立完整的系统模型,并进行仿真实验。
三、仿真与分析1. 建立异步电机的模型需要建立异步电机的数学模型,并在Simulink中进行搭建。
基于MATLAB的异步电机变频调速系统的仿真与分析

基于MATLAB的异步电机变频调速系统的仿真与分析1. 引言1.1 研究背景异步电机是一种常见的电动机类型,在工业和家用电器中广泛应用。
随着电力系统的发展和电动机技术的进步,对异步电机的变频调速系统进行研究已成为一个热门领域。
变频调速系统可以根据实际需要调整电机转速,实现节能、精准控制和适应不同工况需求的目的。
随着现代工业的自动化程度不断提高,对电机的调速要求也越来越高。
传统的电压调速和机械调速方式已经无法满足实际需求,因此异步电机变频调速系统逐渐成为工业界的主流选择。
在此背景下,研究基于MATLAB的异步电机变频调速系统的仿真与分析具有重要意义。
通过对异步电机原理、变频调速系统设计和MATLAB仿真模型搭建等方面的研究,可以更好地了解和掌握这一技术,为实际应用提供理论支持和指导。
本文将对异步电机变频调速系统进行深入探讨,旨在为相关领域的研究和应用提供有益的参考和借鉴。
1.2 研究意义异步电机是工业中常用的电动机之一,其性能直接影响到生产效率和能源消耗。
变频调速系统能够实现电机转速控制,提高电机的运行稳定性和效率,减少能耗,降低维护成本。
基于MATLAB的异步电机变频调速系统的仿真与分析具有重要的研究意义。
通过仿真可以快速、灵活地模拟电机的工作情况,预测电机在不同工况下的性能表现,为设计和优化电机调速系统提供有力的依据。
通过仿真分析可以深入了解变频调速系统在不同参数和工况下的工作特性,为实际应用中的系统调试和优化提供指导。
对异步电机变频调速系统的研究可以推动电机控制技术的发展,促进工业生产的智能化和节能化,具有重要的社会和经济意义。
基于MATLAB的异步电机变频调速系统的仿真与分析不仅具有理论研究意义,还具有实际应用价值,对推动电机控制技术的发展和提高工业生产效率具有重要意义。
1.3 研究目的研究目的是为了探讨基于MATLAB的异步电机变频调速系统的仿真与分析,从而更深入地了解异步电机的工作原理和变频调速系统的设计方法。
基于MATLAB的直流调压调速控制系统的仿真

基于MATLAB的直流调压调速控制系统的仿真一、直流调压调速控制系统的原理直流调压调速控制系统主要由电压控制回路和速度控制回路组成。
电压控制回路用于控制电动机的电压,从而实现电动机的调压;速度控制回路用于调整电动机的转速,实现电动机的调速。
电压控制回路和速度控制回路之间是相互联系的,二者协同工作才能使电动机达到预定的工作状态。
在本文的仿真中,我们将重点关注电压控制回路和速度控制回路的设计和性能。
二、仿真模型的建立在MATLAB中,我们可以通过Simulink工具建立直流调压调速控制系统的仿真模型。
我们需要建立电动机的数学模型,包括转矩方程、速度方程和电压方程;我们需要设计电压控制回路和速度控制回路的控制算法和参数。
将电动机模型和控制回路结合在一起,形成直流调压调速控制系统的仿真模型。
三、电压控制回路的仿真分析电压控制回路的主要任务是根据速度控制回路的信号要求,生成电压信号并送往电动机,控制电动机的转矩。
在仿真中,我们可以通过改变输入信号的幅值和频率,观察电压控制回路的响应特性,比如超调量、调节时间等。
我们也可以通过引入一些干扰信号,例如负载扰动,来观察电压控制回路的抗扰性能。
通过仿真分析,我们可以得出电压控制回路设计的满意度和稳定性。
五、整体系统的仿真分析经过对电压控制回路和速度控制回路的单独仿真分析后,我们可以将两者结合在一起,形成整体的直流调压调速控制系统的仿真模型。
通过整体系统的仿真分析,我们可以评估控制系统的性能和稳定性。
我们可以观察系统在不同工作状态下的响应特性,比如启动、调压和调速的过程中的响应速度、控制精度和稳定性。
我们也可以引入一些复杂的工况和干扰信号,例如负载变化和电网故障,来观察整体系统的鲁棒性和抗干扰能力。
通过仿真分析,我们可以评估整体系统的设计合理性和可靠性。
六、结论通过MATLAB的仿真分析,我们可以对直流调压调速控制系统的性能和稳定性进行全面评估。
我们可以深入了解电压控制回路和速度控制回路的设计和性能,找出设计的不足和改进的方向。
直流电机调速matlab仿真报告

直流电机调速仿真报告1. 背景直流电机是一种常见的电动机类型,广泛应用于工业生产和家庭设备中。
在实际应用中,为了满足不同工况下的需求,需要对直流电机进行调速控制。
调速控制可以实现电机转速的精确控制,提高系统的稳定性和效率。
本报告旨在通过Matlab仿真分析直流电机调速控制系统,在理论与实践结合的基础上,提出相应的建议。
2. 分析2.1 直流电机调速原理直流电机调速原理主要基于改变电源的电压或者改变外加负载来实现对电机转速的控制。
常见的直流电机调速方法有:•电压调制法:通过改变直流电源的输出电压来改变转矩和转速;•变阻器分压法:通过改变外接阻值来改变转矩和转速;•变极数法:通过改变励磁回路中串联或并联的励磁线圈数目来改变转矩和转速;•PWM调制法:通过脉冲宽度调制技术来控制输入给定功率。
2.2 直流电机调速控制系统直流电机调速控制系统由电源、电机、传感器、控制器和负载组成。
其中,传感器用于测量电机的转速和位置,控制器根据测量值计算出合适的控制信号,通过电源提供给电机。
负载则影响电机的转速和转矩。
常见的直流电机调速控制方法有:•比例积分(PI)控制:根据误差信号进行比例和积分运算,生成合适的输出信号;•模糊控制:基于模糊推理原理,根据输入变量和规则库生成输出信号;•自适应控制:根据系统动态特性自动调整参数以实现最优性能。
2.3 仿真建模与参数设置本次仿真采用Matlab/Simulink软件进行建模与仿真。
首先需要确定直流电机的基本参数,如额定功率、额定转速、额定电压等。
然后根据实际情况设置仿真模型中的参数。
本次仿真设置了一个基于PWM调制法的直流电机调速系统模型。
具体参数如下:•额定功率:100W•额定转速:1500rpm•额定电压:220V•PWM调制频率:1kHz•控制器采样周期:0.01s3. 结果与分析3.1 仿真结果展示在进行仿真之后,我们得到了直流电机调速系统的仿真结果。
以下是部分结果的展示:•转速曲线图:•转矩曲线图:3.2 结果分析根据仿真结果,可以对直流电机调速系统进行分析。
直流电动机双闭环调速系统MATLAB仿真实验报告

直流电动机双闭环调速系统MATLAB仿真实验报告
实验目的:
本实验旨在设计并实现直流电动机的双闭环调速系统,并使用MATLAB进行仿真实验,验证系统的性能和稳定性。
实验原理:
直流电动机调速系统是通过改变电机的输入电压来实现调速的。
双闭环调速系统采用了速度环和电流环两个闭环控制器,其中速度环的输入为期望转速和实际转速的误差,输出为电机的电流设定值;电流环的输入为速度环输出的电流设定值和实际电流的误差,输出为电机的输入电压。
实验步骤:
1.建立直流电动机的数学模型。
2.设计速度环控制器。
3.设计电流环控制器。
4.进行系统仿真实验。
实验结果:
经过仿真实验,得到了直流电动机双闭环调速系统的性能指标,包括上升时间、峰值过渡性能和稳态误差等。
同时,还绘制了调速曲线和相应的控制输入曲线,分析了调速系统的性能和稳定性。
实验结论:
通过对直流电动机双闭环调速系统的仿真实验,验证了系统的性能和
稳定性。
实验结果表明,所设计的双闭环控制器能够实现快速且稳定的直
流电动机调速,满足了实际工程应用的需求。
实验心得:
本实验通过使用MATLAB进行仿真实验,深入理解了直流电动机的双
闭环调速系统原理和实现方式。
通过实验,我不仅熟悉了MATLAB的使用,还掌握了直流电动机的调速方法和控制器设计的原则。
同时,实验中遇到
了一些问题,比如系统的超调过大等,通过调整控制器参数和优化系统结
构等方法,最终解决了这些问题。
通过本次实验,我对直流电动机调速系
统有了更加深入的理解,为之后的工程应用打下了坚实的基础。
matlab-电机控制综合仿真任务书
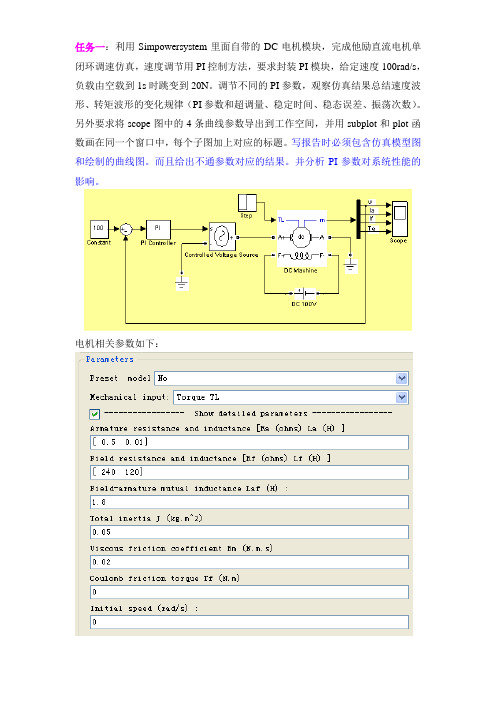
任务一:利用Simpowersystem里面自带的DC电机模块,完成他励直流电机单闭环调速仿真,速度调节用PI控制方法,要求封装PI模块,给定速度100rad/s,负载由空载到1s时跳变到20N。
调节不同的PI参数,观察仿真结果总结速度波形、转矩波形的变化规律(PI参数和超调量、稳定时间、稳态误差、振荡次数)。
另外要求将scope图中的4条曲线参数导出到工作空间,并用subplot和plot函数画在同一个窗口中,每个子图加上对应的标题。
写报告时必须包含仿真模型图和绘制的曲线图。
而且给出不通参数对应的结果。
并分析PI参数对系统性能的影响。
电机相关参数如下:任务二:利用Simulink 基本模块搭建他励直流电机闭环调速系统直流电机子模块,根据以下电机数学模型搭建 电磁转矩公式:e M a T C I =Φ 动力学平衡方程:e L m d T T B Jdtωω--= 电机模块要求封装,参数20.05kg m J =⋅,0.02N m s m B =⋅⋅,165m C =,0.01Wb f Φ=,恒定负载T L =20N 点击封装模块时输入。
PI 控制模块要求封装,调节不同的PI 参数,得到不同的速度波形。
写报告时,要给出仿真模型和不同PI 参数的速度波形。
另外要求通过控制理论方法设计出理想的PI 参数范围,要求给出设计过程。
任务三:修改任务二的模型,使其PI控制参数来自外部变量设定(不需要封装),将速度偏差的仿真结果导出到工作空间(to workspace),以便进一步处理,用m 文件编写一段循环程序调用任务二的仿真模型(调用函数为sim,使用方法sim(‘*.mdl’,T),T为仿真时间),仿真时间设为3s。
在m文件中实现对PI参数的调整,处理数据,得到满意的控制参数,绘制仿真结果曲线图。
PI子系统如下,不需要封装,kp、ki参数在程序里面设置。
M文件中包含:设定PI参数――调用仿真模型――速度偏差的最大值不超过105在2s后小于某个设定值0.001,――不满足,则修改PI参数(PI参数的变化范围根据任务二理论设计的范围设定变化区间)……最后用plot画出速度和转矩波形,用subplot将两个图画在一个窗口。
matlab电机仿真精华50例
matlab电机仿真精华50例Matlab是一种功能强大的数学仿真软件,可用于电机仿真的建模和分析。
以下是50个精华的Matlab电机仿真例子,涵盖了各种不同类型的电机和相关问题。
1. 直流电机的速度控制仿真:使用PID控制算法实现直流电机的速度控制,并观察不同参数设置对性能的影响。
2. 三相感应电机启动仿真:模拟三相感应电机的启动过程,包括起动电流和转矩的变化。
3. 永磁同步电机的矢量控制仿真:使用矢量控制算法实现永磁同步电机的速度和转矩控制。
4. 步进电机的脉冲控制仿真:通过给步进电机输入脉冲信号来实现精确的位置控制。
5. 交流电机的谐波分析仿真:分析交流电机的谐波失真情况,并提供相应的滤波解决方案。
6. 混合动力电机系统仿真:模拟混合动力汽车中的电动机和传统发动机的协同工作,评估燃油效率和性能。
7. 电机热仿真:通过建立电机的热传导模型,分析电机工作过程中的温度分布和热损耗。
8. 电机故障诊断仿真:使用信号处理和模式识别技术,模拟电机故障的检测和诊断。
9. 电机噪声仿真:通过建立电机的声学模型,分析电机噪声产生的原因和控制方法。
10. 无感传感器控制的无刷直流电机仿真:通过仿真实现无感传感器控制的无刷直流电机的速度和位置控制。
11. 非线性电机控制仿真:研究非线性电机的控制问题,并提供相应的解决方案。
12. 电机的电磁干扰仿真:分析电机工作时对其他电子设备造成的电磁干扰,并提供抑制措施。
13. 电机振动分析仿真:通过建立电机的振动模型,分析振动的原因和控制方法。
14. 电机轴承寿命仿真:通过建立电机轴承的寿命模型,预测电机轴承的使用寿命。
15. 电机的能量回收仿真:研究电机能量回收技术,在制动或减速过程中将电机生成的能量回收到电网中。
16. 电机齿轮传动仿真:分析电机齿轮传动系统的动力学性能和传动特性。
17. 多电机系统仿真:模拟多电机系统的协同工作,包括电机之间的通信和同步控制。
18. 电机启动过电流仿真:分析电机启动过程中的过电流现象,并提供相应的限流解决方案。
MATLAB与交直流调速系统仿真

在未来,我们可以进一步研究和改进交直流调速系统的控制策略和效率。
Hale Waihona Puke MATLAB与交直流调速系 统仿真
MATLAB与交直流调速系统仿真的背景
交直流调速系统的原理
1 交流调速系统
采用变频器或触发控制器对交流电机的电源 频率进行调整来改变其转速。
2 直流调速系统
使用变阻器或变压器来调节直流电机的电流, 从而改变其转速。
MATLAB在交直流调速系统中的应用
1 数学建模
性能评估
分析不同控制算法的性能表现,找到最佳控制策略。
系统优化
通过仿真结果来改进交直流调速系统的响应速度和 稳定性。
问题与挑战
1 模型准确性
建立准确的数学模型是交直流调速系统仿真 的挑战之一。
2 控制算法设计
选择和设计适合交直流调速系统的高性能控 制算法也面临着一些困难。
总结与展望
总结成果
通过MATLAB仿真,我们可以更深入地了解交直流调速系统,并优化其性能。
使用MATLAB建立交直流调速系统的数学模型,包括电流、转速和扭矩方程。
2 控制算法开发
使用MATLAB进行控制算法设计和调试,以实现高效的调速性能。
仿真实例展示
系统性能
通过MATLAB仿真,评估交直流调速系统的转速响应 和动态性能。
电流响应
分析在不同负载和输入电压条件下,电机的电流响 应。
结果分析与讨论
MATLAB直流调速系统仿真
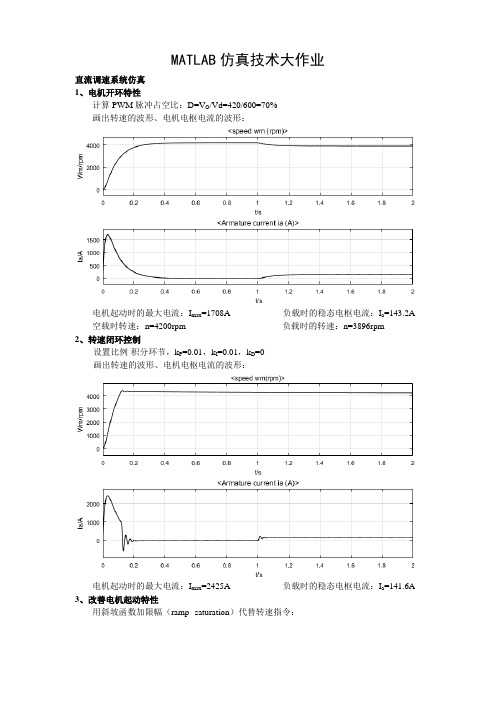
MATLAB仿真技术大作业直流调速系统仿真1、电机开环特性计算PWM脉冲占空比:D=V O/Vd=420/600=70%画出转速的波形、电机电枢电流的波形:电机起动时的最大电流:I max=1708A 负载时的稳态电枢电流:I a=143.2A 空载时转速:n=4200rpm 负载时的转速:n=3896rpm2、转速闭环控制设置比例-积分环节,k P=0.01,k I=0.01,k D=0画出转速的波形、电机电枢电流的波形:电机起动时的最大电流:I max=2425A 负载时的稳态电枢电流:I a=141.6A 3、改善电机起动特性用斜坡函数加限幅(ramp--saturation)代替转速指令:斜坡斜率设为8400,限幅设为4200。
画出转速的波形、电机电枢电流的波形:电机起动时的最大电流:I max=619.7A4、简化降压斩波器降压斩波器只使用一只IGBT和一只二极管时,再次进行仿真。
画出电机电枢电流的波形与第3问的波形进行比较:与第3问的波形进行比较:t=0.3s时,I a(3)=379.3A I a(4)=379.3At=0.8s时,I a(3)=-8.92A I a(4)=-0.02107At=1.5s时,I a(3)= 143.4A I a(4)=143.8A通过对比,可知三段波形的数值几乎无差别或差别非常小可忽略不计;但波形显示在t=0.5s 左右时第四问波形的纹波值比第三问波形的纹波值小。
因为器件替换后,各部分的功能并未发生变化,电路的正常工作状态并未受到影响,因此用不同的降压斩波器波形几乎无差别。
纹波的区别可能是因为二极管与带反并联二极管的IGBT、不带反并联二极管的IGBT与带反并联二极管的IGBT结构上的区别所导致。
基于matlab的转速、电流反馈控制直流调速系统的simulink仿真

转速、电流反馈控制直流调速系统的仿真基本数据如下:1.直流电动机:V U N 220=、A I N 136=、min/1460r n N =)min /(132.01-∙=r V C e ,允许过载倍数λ=1.5;2.晶闸管装置放大系数:40=s K ;电枢回路总电阻:R=0.5Ω;4.时间常数:s T l 03.0=,s T m 18.0=;电流反馈系数A V I U Nim /05.05.1*==β;转速反馈系数:)min /(007.01460101*-⋅===r V n U N nm α无静差,电流超调量%5≤i σ,空载起动到额定转速时的转速超调量%10≤n σ。
一、电流环仿真图1电流环仿真模型图2仿真结果图3无超调图4较大超调二、双闭环仿真仿真结果显示在直流电动机的恒流升速阶段,电流值低于200A,因为电流调节系统受到电动机反电动势的扰动,为一个线性渐增的扰动量,系统做不到无静差。
把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环,构成转速、电流双闭环调速系统。
图5双闭环调速系统仿真模型图6转速环空载高速起动图7转速环满载高速起动图8转速环抗扰波形三、分析总结双闭环调速系统起动过程的电流和转速波形是接近理想快速起动过程的波形。
按照ASR在起动过程中的饱和情况,可将起动过程分为三个阶段:电流上升阶段、恒流升速阶段和转速调节阶段。
从起动时间上看,Ⅱ阶段恒流升速是主要的阶段,因此双闭环系统基本上实现了电流受限制下的快速起动,利用了饱和非线性控制方法,达到“准时间最优控制”。
带PI调节器的双闭环调速系统还有转速必超调的特点。
在双闭环调速系统中,ASR的作用是对转速的抗扰调节并使之在稳态时无静差,其输出限幅决定允许的最大电流;ACR的作用是电流跟随,过流自动保护和及时抑制电压波动。
与带电流截止负反馈的直流调速系统相比,双闭环控制直流调速系统充分利用电机允许的过载能力,在转速上升阶段始终保持电机允许电流的最大值,使电机转速以最大加速度上升;在到达稳定转速后,电流又能在短时间内降下来,使转矩与负载相平衡从而稳态运行,有良好的起动性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1前言许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求具有良好的稳态、动态性能。
而直流调速系统调速范围广、静差率小、稳定性好以及具有良好的动态性能,在高性能的拖动技术领域中,相当长时期内几乎都采用直流电力拖动系统。
双闭环直流调速系统是直流调速控制系统中发展得最为成熟,应用非常广泛的电力传动系统。
由于该系统的结构较复杂,控制器可调参数较多,所以整个系统的设计和校正比较困难,需要有一个功能全面、分析方便的仿真设计平台。
传统的仿真设计平台主要是VC和Delphi等高级语言环境,需要做大量的底层代码编写工作,很不方便,效率不高,仿真结果也不直观。
自从MATLAB的Simulink推出以后,动态系统的仿真就变得非常容易了。
因其含有极为丰富的专用于控制工程与系统分析的函数,具有强大的数学计算功能,且提供方便的图形绘制功能,只要在Simulink中画出系统的动态结构图模型,编写极简单的程序,即可对该系统进行仿真,效率极高,环境友好,从而给系统的设计和校正带来很大的方便。
Matlab 在学术和许多实际领域都得到广泛应用,已成为国际控制界应用最广的语言和工具。
本课题主要是在Simulink环境中对双闭环直流调速系统进行仿真设计,具体内容有:对电流调节器和转速调节器进行校正设计;对电流环和转速环进行时域和频域分析;对调速系统进行跟随性和抗扰性分析。
2双闭环直流调速系统的工作原理2.1双闭环直流调速系统的介绍双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统。
它具有动态响应快、抗干扰能力强的优点。
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI 调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差。
但如果对系统的动态性能要求较高,例如要求起制动、突加负载动态速降小等等,单闭环系统就难以满足要求。
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩。
在单闭环系统中,只有电流截止负反馈环节是专门用来控制电流的。
但它只是在超过临界电流dcr I 值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
带电流截止负反馈的单闭环调速系统起动时的电流和转速波形如图2-1a 所示。
当电流从最大值降低下来以后,电机转矩也随之减小,因而加速过程必然拖长。
在实际工作中,我们希望在电机最大电流(转矩)受限的条件下,充分利用电机的允许过载能力,最好是在过渡过程中始终保持电流(转矩)为允许最大值,使电力拖动系统尽可能用最大的加速度起动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这样的理想起动过程波形如图2-1b 所示,这时,启动电流成方波形,而转速是线性增长的。
这是在最大电流(转矩)受限的条件下调速系统所能得到的最快的起动过程。
(a)带电流截止负反馈的单闭环调速系统起动过程 (b)理想快速起动过程 (a)Current deadline with a single negative feedback loop (b)an ideal quick start processspeed control system starting process图2-1 调速系统起动过程的电流和转速波形Fig2-1 speed system start of the current process and speed waveformI dt I d I (a) (b)实际上,由于主电路电感的作用,电流不能突跳,为了实现在允许条件下最快启动,关键是要获得一段使电流保持为最大值dm I 的恒流过程,按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变[1],那么采用电流负反馈就能得到近似的恒流过程。
问题是希望在启动过程中只有电流负反馈,而不能让它和转速负反馈同时加到一个调节器的输入端,到达稳态转速后,又希望只要转速负反馈,不再靠电流负反馈发挥主作用,因此我们采用双闭环调速系统。
这样就能做到既存在转速和电流两种负反馈作用又能使它们作用在不同的阶段。
2.2双闭环直流调速系统的组成为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,二者之间实行串级连接,如图2-2所示,即把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置。
从闭环结构上看,电流调节环在里面,叫做内环;转速环在外面,叫做外环。
这样就形成了转速、电流双闭环调速系统。
该双闭环调速系统的两个调节器ASR 和ACR 一般都采用PI [1]调节器。
因为PI 调节器作为校正装置既可以保证系统的稳态精度[1],使系统在稳态运行时得到无静差调速,又能提高系统的稳定性[1];作为控制器时又能兼顾快速响应和消除静差两方面的要求。
一般的调速系统要求以稳和准为主,采用PI 调节器便能保证系统获得良好的静态和动态性能。
图2-2 转速、电流双闭环直流调速系统Fig2-2 rotation 、current double closed loopDC rotation regulation systemU *n 、U n —转速给定电压和转速反馈电压U *i 、U i —电流给定电压和电流反馈电压ASR —转速调节器 ACR —电流调节器 TG —测速发电机TA —电流互感器 UPE —电力电子变换器nASR ACR U *n+ - U n U iU *i + - U ct TA+ -U dI d UPE - M TGn i 外环 内环2.3双闭环直流调速系统的稳太结构图和静特性首先要画出双闭环直流系统的稳态结构图2-3a ,分析双闭环调速系统静特性的关键是掌握PI 调节器的稳太特征。
一般存在两种状况:饱和——输出达到限幅值;不饱和——输出未达到限幅值。
当调节器饱和时,输出为恒值,输入量的变化不再影响输出,相当与使该调节环开环。
当调节器不饱和时,PI 作用使输入偏差电压U ∆[1]在稳太时总是为零。
图2-3a 双闭环调速系统的稳态结构图Fig2-3a Double-loop speed control system of steady-state chartα—转速反馈系数 β—电流反馈系数α—Speed feedback coefficient β—Current feedback coefficient实际上,在正常运行时,电流调节器是不会达到饱和状态的。
因此,对静特性来说,只有转速调节器饱和与不饱和两种情况。
(一)转速调节器不饱和此时两个调节器都不饱和,稳态时,他们的输入偏差电压都为零,即n U U n n α==*d i i I U U β==*由n U U n n α==*得: 0*n U n n ==α 从而得到图2-3b 静特性的n 0-A 段。
由d i i I U U β==*,且ASR 不饱和**im i U U <⇒得:dm d I I <,说明n 0-A 段静特性从0=d I (理想空载状态)一直延续到dm d I I =,而dm I 一般都大于额定电流dnom I 的。
(二)转速调节器饱和此时,ASR 输出达到限幅值*im U ,转速外环呈开环状态,转速的变化对系统不再产生影响。
双闭环变成一个电流无静差的单闭环系统。
稳态时有:n 0 Id I dm I dN ndm im d I U I ==β*从而得到图2-3b 静特性的A-B 段。
双闭环调速系统的静特性在负载电流小于dm I 时表现为转速无静差[1],转速负反馈起主要调节作用。
当负载电流达dm I 到后,转速调节器饱和,电流调节器起主要调节作用,系统表现为电流无静差,得到过电流的自动保护。
图2-3b 双闭环调速系统的静特性Fig2-3b Double-loop speed control system of static characteristics 2.4双闭环直流调速系统的数学模型双闭环控制系统数学模型的主要形式仍然是以传递函数[2]或零极点模型[2]为基础的系统动态结构图。
双闭环直流调速系统的动态结构框图如图2-4所示。
图中)(s W ASR 和)(s W ACR 分别表示转速调节器和电流调节器的传递函数。
为了引出电流反馈,在电动机的动态结构框图中必须把电枢电流d I 显露出来。
图2-4 双闭环直流调速系统的动态结构框图Fig2-4 double closed loop DC rotation regulation system of dynamic structure diagram2.5双闭环直流调速系统的起动过程分析设置双闭环控制的一个重要目的就是要获得接近于理想的起动过程,因此在分析双闭环直流调速系统的动态性能时,有必要首先探讨它的起动过程。
双闭环直流调速系统突加给定电压*i U 由静止状态起动时,转速和电流的动态过程如图2-5所示。
由于在起动过程中转速调节器ASR 经历了不饱和、饱和、退饱和三个阶段,整个动态过程就分成图中标明的I 、II 、III 三个阶段。
(一)第I 阶段(0~t 1)是电流上升阶段。
突加给定电压*n U 后,通过两个调节器的跟随作用,使ct U 、0d U 、d I 都上升,但是在d I 没有达到负载电流dL I 之前,电动机还不能转动。
当dL d I I ≥后,电动机开始转动。
由于机电惯性的作用,转速不会很快增长,因而转速调节器ASR 的输入偏差电压n n n U U U -=∆*的数值仍较大,其输出电压保持限幅值*im U ,强迫电枢电流d I 迅速上升。
直到dm d I I ≈,**im i U U ≈,电流调节器很快就压制了d I 不再迅速增长,标志着这一阶段的结束。
在这一阶段中,ASR 很快进入并保持饱和状态,而ACR 一般不饱和。
图2-5 双闭环直流调速系统起动过程的转速和电流波形Fig2-5 double closed loop DC rotation regulation systemstarting process of rotation and current profilet t I dL I d *n(二)第II 阶段(t 1~t 2)是恒流升速阶段。
恒流升速阶段是起动过程中的主要阶段。
在这个阶段中,ASR 始终是饱和的,转速环相当于开环,系统表现为恒值电流给定*im U 作用下的电流调节系统,基本上保持电流d I 恒定,因而系统的加速度恒定,转速呈线性增长(图2-5)。
与此同时,电动机的反电动势E 也按线性增长,对电流调节系统来说,E 是一个线性渐增的扰动量(图2-4)。