停车场 数学建模
停车场泊车位设计的数学建模
对每一排停车位, 其一边为通道,另一边则可以是另一排停车位或者是停车场的 边缘。所以停车排数 PC 最多只能是通道数 P 1 的两倍,即:
PC 2P 1 (2)
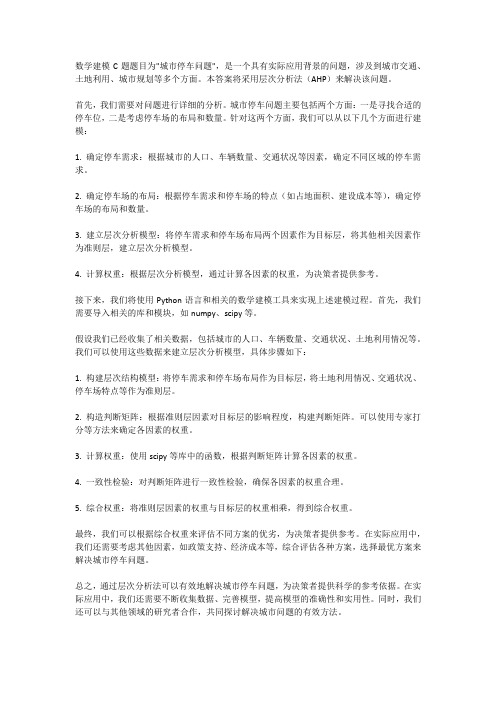
如果按照一排停车位,一条通道,一排停车位这样三排一组的形式加以组合,依 次排列,确实也可以达到 PC 2P 1 。即(2)式中的等号是可以成立的。此时, 车位数可以达到停车位位置的最大值,排列情况同样可以见图 9 100 米宽的停车场的一边可以当作足够长的边来看待, 将 300 米为一排来设计小 轿车的车位, 即每排车位与矩形的短边平行。 在理想情况下, 根据 4.1 讨论可知, 最佳设计下的车位长度为:
我们假定小轿车的最外端在半径为c1的原周上行驶且此时轿车的最内端在半径为c2的原周上随之移动然后以角度进入停车位所以通道的最小宽度每辆车均以角度停放用w表示小轿车停车位的宽度l表示停车位的长度这的最上方并没有渠道最下端是考虑到车身以外的区域可以留给对面停车位使用l0表示停车位末端的距离易知他们分别是停车角的函数且有
1 L C1 sin Cw cos 3.3sin 69.94 1.4cos 69.94 3.580(米) 2
停车场通道宽度为:
R C1 C2 cos 4 2cos 69.94 3.314(米)
所以,理想情况下的一组(即两排车位中间加一条行通车道)的宽度 X 约为:
X 2L R 10.474(米)
则 100 米宽的停车场能够考虑设计 9 组这样的车位, 现在在考虑从出入口到最里 面靠墙这一段与横向垂直通道 R ' 的情况,即有一组里面有一排车位数是完整的, 也就是说其余的 8 组以及剩下一组的两排车位数是一样缺少出入口通道 R ' 所占 的数目。显然,横向通道 R ' =6.1 米较合理,而理想条件下相邻车尾末端的距离 是 L0
停车场-数学建模
停车场-数学建模停车场泊车位模型摘要现如今随着机动车辆的增加,车辆停放困难的问题逐渐加重,我们现在就来讨论New England的一个镇上的某停车场为场景的数学模型。
对单个停车位进行分析得出车位最佳角度,然后对整个停车区域进行规划得出车位布局,再用模糊评判来进行停车位效度评价,比较好的解决了问题。
在对停车场泊车位优化设计的模型中,我们考虑一种把车间距空间并入车辆所在的空间的方式,形成一个矩形,因其可以在空间无间隙密铺从而简化分析过程。
通过分析单个车辆进入泊车位的车辆状态得到车辆的最小转弯半径,再通过非整数规划得到单个车位最佳设计角度,然后拓展到整个规划区域,最后得出停车场泊车位的整个规划,最终的设计方案总共能够提供98个泊车位,空间时间利用效率较高。
对停车场的车位效度评价,采用模糊评价模型,从停车场的安全性、便捷性和效率性三个方面来建立效度评价指标体系,得到三个一级指标,再从进出停车场、进出停车位和停车场内行车等方面考虑建立二级指标,得出比较全面的效度评价指标体系,最后再根据指标体系用层次分析法和模糊评价来进行车位效度评价。
关键词:层次分析模糊评价转弯半径停车角度1、问题的叙述在New England的一个镇上,有一位于街角处面积100 200平方英尺的停车场,场主请你代为设计停车车位的安排方式,即设计在场地上划线的方案。
容易理解,如果将汽车按照与停车线构成直角的方向,一辆紧挨一辆地排列成行,则可以在停车场内塞进最大数量的汽车,但是对于那些缺乏经验的司机来说,按照这种方式停靠车辆是有困难的,它可能造成昂贵的保险费用支出。
为了减少因停车造成意外损失的可能性,场主可能不得不雇佣一些技术熟练的司机专门停车;另一方面,如果从通道进入停车位有一个足够大的转弯半径,那么,看来大多数的司机都可以毫无困难地一次停车到位。
当然通道越宽,场内所容纳的车辆数目也越少,这将使得场主减少收入。
2、问题分析一般来说,想尽可能的把车塞进停车场,最好的办法就是以垂直停靠的方式将车一辆挤一辆地排成行,但是这样停放的后果就是车辆不能自由出入,只有后进入的车辆全部先出去了,先进入的车才可以离开停车场,显然不符合实际的需求。
车位分配问题 数学建模
停车场车位分配问题研究一. 摘要某写字楼的停车位数目一定,主要提供写字楼办公人员办卡包年或包月使用,为了使停车场空置率减少,以及免于有卡却没有车位产生冲突的尴尬,我们必须对停车流量进行模拟分析,建立合理的最佳的车位分配管理方法,并得到最大的收益。
首先对附表中数据进行分析,因为我们得到的是四月份的停车流量,为了方便分析研究,我们应该把数据转化为停车量。
我们从中引入了概率进行模拟。
假设停在停车场中的车辆在各个时间段离开是按照泊松分布,即可分别求的到来的和离开的车辆数目,就可以方便得得到停车量这个关键的数据。
分析结果如下表所示:定义冲突概率1212iα=-,i I 为第i 个时间段进入停车场的车辆数目。
由于第四时间段为停车高峰期,因此原则这一时间段进行分析。
样本服从正态分布,用3δ原则,即可求出当0.05α<时的最大售卡量为240张。
制定更好的车位分配方案时则将卡的种类分为年卡和月卡,通过设定年卡和月卡的价格来控制相应的销量,从而使收益最大。
运用边际函数相关知识,设立目标函数和约束条件,用Lingo 软件即可计算出当0.05α<时年卡和月卡最佳销售价格以及张数如下表所示:关键词:泊松分布,正态分布,边际函数二.问题分析与重述问题一:题目要求模拟附表中停车流量,分析停车量的统计规律。
停车流量与停车量是两个不同的概念,要分析停车量的统计规律就必须弄清楚来到停车场的车辆数目以及离开停车场的车辆数目。
而题目所给的条件中我们只知道停车流量,也就是车离开与来到的总的次数,因此我们假设车的离开服从泊松分布,运用概率来求出单位时间内车辆离开的数目,这样也就可以知道单位时间内车辆到来的数目,它们两者的差值也就是我们所要求的停车量。
α=情形下,计算最大售卡量。
问题二:定义冲突概率,求若冲突概率低于0.05根据附表中停车流量数据,以及上题对停车量的分析,我们可以知道在第四个时间段,即早上9:00—10:00停车量是最多的,也就是在这段时间产生冲突的概率是最大的,为了计算最大售卡量,我们就取这段时间进行分析。
我的建模作业----停车场问题1
班 级:信息10-2班学 号:311011020203姓 名:李珂珂案摘要绍兴文理学院数模竞赛C 题近几年我国居民活水平有了显著提高,我校有越来越多的教师购置了汽车,为了解决停车问题,在图书馆前面造了一个地下车库。
车库面积有限,问题是如何利用车库高效地停车,即在保证安全的情况下,尽可能多地停车。
为简单起见,我们假设该车库是一个100x100米的正方形,见下图教师的车都是标准的轿车2x3米,车的最小转弯半径为4米,试设计一个最佳停车方案(只考虑平面)。
入口 出口1.问题的表述由于近几年我国居民生活水品的提高,我校越来越多的教师购买了轿车,为解决停车问题,我校打算在图书馆前建一个地下车库,因为车库为一个100*100的正方形,见下图:出口入口面积有限,问题是如何利用车库再保证安全的情况下,尽可能多的停车,一下是我们运用数学知识解决一下这个问题,已知教师的车都是标准的轿车2x3米,车的最小转弯半径为4米。
2.模型假设和符号说明一.模型假设1).假设每一辆轿车所占的停车位的面积都是相等的,车主都按规定停车。
2).假设每一位车主的驾驶技术都是相当好的。
二.符号说明3.问题分析一般情况下,如果想尽可能的把车停在停车场,最有效最大限度利用空间的最好办法是以垂直的方式把车排成行,但是,这样停放时会造成车辆无法自由出入,那样只有靠近门口停放的车出去了,里面的车才能离开停车场,很明显这是不符合现实生活中的需求的。
所以,为了让汽车自由的出入停车场,必须设置一些具有足够宽度的通道,而且每一个通道都要有足够大的转弯半径,由于停车场的总面积是一定的,所以通道越宽越多,就会使得容纳的车辆数越少。
所以我们的主要问题是要确定在能够满足车辆的自由出入的情况下,怎样进行停车位置和车辆通道的设计,从而能使得停放的车辆最多,以致达到既方便了停车又能获得最大的经济效益。
通过对每一个停车位的分析,得到每辆车占据的停车场面积函数是由车辆所占的停车位面积和通道所占通道面积两部分组成,面积函数可以化为角的一次函数,再对面积函数进行求解,就可以得到车位最佳设计角度。
2023高教杯数学建模c题
数学建模C题题目为"城市停车问题",是一个具有实际应用背景的问题,涉及到城市交通、土地利用、城市规划等多个方面。
本答案将采用层次分析法(AHP)来解决该问题。
首先,我们需要对问题进行详细的分析。
城市停车问题主要包括两个方面:一是寻找合适的停车位,二是考虑停车场的布局和数量。
针对这两个方面,我们可以从以下几个方面进行建模:1. 确定停车需求:根据城市的人口、车辆数量、交通状况等因素,确定不同区域的停车需求。
2. 确定停车场的布局:根据停车需求和停车场的特点(如占地面积、建设成本等),确定停车场的布局和数量。
3. 建立层次分析模型:将停车需求和停车场布局两个因素作为目标层,将其他相关因素作为准则层,建立层次分析模型。
4. 计算权重:根据层次分析模型,通过计算各因素的权重,为决策者提供参考。
接下来,我们将使用Python语言和相关的数学建模工具来实现上述建模过程。
首先,我们需要导入相关的库和模块,如numpy、scipy等。
假设我们已经收集了相关数据,包括城市的人口、车辆数量、交通状况、土地利用情况等。
我们可以使用这些数据来建立层次分析模型,具体步骤如下:1. 构建层次结构模型:将停车需求和停车场布局作为目标层,将土地利用情况、交通状况、停车场特点等作为准则层。
2. 构造判断矩阵:根据准则层因素对目标层的影响程度,构建判断矩阵。
可以使用专家打分等方法来确定各因素的权重。
3. 计算权重:使用scipy等库中的函数,根据判断矩阵计算各因素的权重。
4. 一致性检验:对判断矩阵进行一致性检验,确保各因素的权重合理。
5. 综合权重:将准则层因素的权重与目标层的权重相乘,得到综合权重。
最终,我们可以根据综合权重来评估不同方案的优劣,为决策者提供参考。
在实际应用中,我们还需要考虑其他因素,如政策支持、经济成本等,综合评估各种方案,选择最优方案来解决城市停车问题。
总之,通过层次分析法可以有效地解决城市停车问题,为决策者提供科学的参考依据。
车位分配数学建模
停车场车位分配问题【摘要】本文基于蒙特卡罗模拟法、正态总体、随机概率、线性规划等方法对停车场车位分配问题做了探讨。
根据已有的30天停车流量数据,分析其规律,最终达到合理分配车位,使得停车收益达到最大。
针对问题1:由于题目中统计资料以及相关数据较少,建立一个准确的数据模型比较困难,因此我们使用了蒙特卡罗模拟法,建立了蒙特卡罗模型。
同时我们以17:00—18:00为例说明,使用正态分布函数进行模拟,给出了100天的停车流量的模拟解;再计算其规律时,我们继续计算各时段的均值、标准差、偏度、峰度的统计量,观察这些数据我们有以下结论:1.停车量的高峰期出现在8:00到18:00的时间段里,值得注意的是9:00到12:00出现了停车量的最高峰;2.标准差也和停车量一样出现两边低中间高的情形,并且也是在9:00到12:00出现最大的标准差,进而说明在这三个小时内停车量很大同时汽车的流通量也很大,是一天当中最为繁忙的时间段。
3.偏度和峰度基本上比较接近,说明这些天之内出现停车流量忽高忽低的情况还是比较少的,停车流量还是比较平稳的。
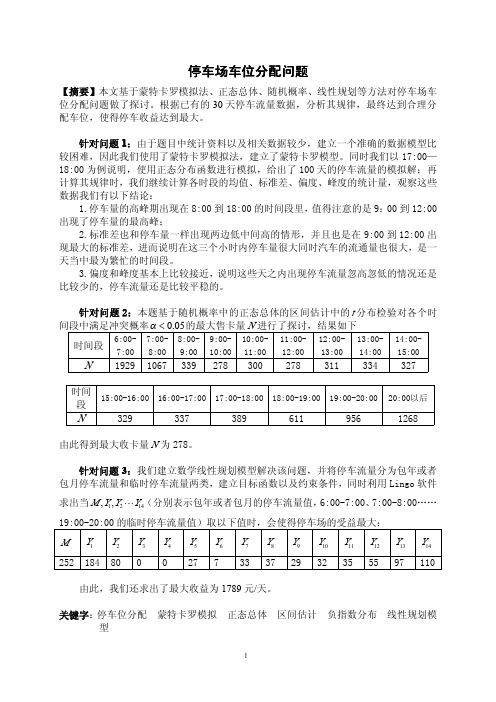
针对问题2:本题基于随机概率中的正态总体的区间估计中的t 分布检验对各个时间段中满足冲突概率05.0<α的最大售卡量N 进行了探讨,结果如下时间段6:00-7:007:00-8:008:00-9:009:00-10:0010:00-11:0011:00-12:0012:00-13:0013:00-14:0014:00-15:00N 19291067339278300278311334327时间段15:00-16:0016:00-17:0017:00-18:0018:00-19:0019:00-20:0020:00以后N3293373896119561268由此得到最大收卡量N 为278。
针对问题3:我们建立数学线性规划模型解决该问题,并将停车流量分为包年或者包月停车流量和临时停车流量两类,建立目标函数以及约束条件,同时利用Lingo 软件求出当1214,,M Y Y Y ⋯(分别表示包年或者包月的停车流量值,6:00-7:00、7:00-8:00……19:00-20:00的临时停车流量值)取以下值时,会使得停车场的受益最大:M 1Y 2Y 3Y 4Y 5Y 6Y 7Y 8Y 9Y 10Y 11Y 12Y 13Y 14Y 2521848027733372932355597110由此,我们还求出了最大收益为1789元/天。
MathorCup大学生数学建模挑战赛B题全国二等奖
2.问题分析
2.1 问题一的分析
根据查找的相关文献,我们提炼了几个与小区汽车停车位的分布合理有关的关键指 标。对于这几个指标,我们从“点”与“面”两个方面来考虑指标与判定车位分布的关 联。通过对指标的理解,我们在“面”的角度选择了多因素的决策模型。
2.2 问题二的分析
首先我们要对附件一所提供的内容进行理解,以及归纳总结。从附件一中得到有关 指标的所对应的判断标准及判断值。再从问题一中建立的模型出发,综合考虑停车位分 布的合理性,并对判断的结果进行相应的解释。
车位分布的优化设计与评价
摘要
现代社会经济的快速发展导致了小区内私家车数量的快速增长,因此小区内停车场 如何科学合理的分布成为了社会关注的问题。本文针对此问题,先建立了停车场综合评 价模型,再将所设计方案应用于已给附件,指出该小区停车场设计不合理,最终给出合 理分配方案,并与不合理的方案进行比较分析。 针对问题一:为了得到停车场车位的最优方案,我们采用多指标综合评价中的最优 回归构权法,先将评价停车场的指标分为分为三类,分别是方便性,实用性和舒适性。 其中方便性由效用时间和出口的位置决定;实用性由安全系数、紧急逃离和车位布置方 位决定;舒适性由排风口位置和场内环境决定。在选取的七个指标中,我们从“点”与 “面”两个方面来考虑指标与判定车位分布的关联。通过对指标的理解,我们在“面” 的角度选择了多因素的决策模型。 针对问题二:由于给出的附件为一张停车场的示意图,我们在查证现实生活中车位 的标准大小后确定所给图的大小,确定出比例尺为 1:500,并且将所给停车场分成 A 和 B 两个区域,分别对这两个区域再实行分区,最终得到 8 个区域,利用比例尺求得相 关数据。再根据问题一中所探讨出来的模型,分别进行点和面的分析,用 Matlab 处理 所求数据,再画出 A 和 B 两区域的评价得分图,车位得分情况呈下降趋势,故得出所 给停车分布并不合理。 针对问题三:由于在第二问中,我们算得车位分配并不是最优化,我们接下来对车 位最优化的方案进行探究。我们对 A 和 B 两个区域分别探讨,为了得到“均好”的效 果,我们重新分配车位的原则为 :对于得分高的车位,安排需要下楼时间长的户主。基于 这一原则,我们对问题二的车位得分情况以及不同楼层的下楼时间进行了简单的排序, 把得分高的车位对应与下楼时间长的户主,得到了重新修正过的等效时间。然后求出了 分配前后 A、B 区域的得分标准差,并且画出了重新分配前后的评价得分对比图,发现 优化后的分布方案显然更为科学合理。 关键词:多指标综合评价 最优化 评价得分
停车场规划数学建模
医院停车场规划问题摘要本题是个优化设计问题,通过合理设计停车场的停车方式和通道大小使得停车场在有限的区域下能停放的下更多的车辆,为医院患者解决停车难的问题。
针对于问题1,由于该医院挂号是从7:30开始,但8:00之后医生才开始门诊,每个患者平均门诊时间为1小时30分钟。
所以在7:30-8:00之间来的患者要到9:30才能离开医院,而在8:00之后来的患者只需门诊1小时30分钟就可离开医院。
于是,可通过用Excel表对表1数据进行处理和分析,以每五分钟为单位,统计此时停车场停放的车辆数。
因此,根据统计结果可知在周二9:30这个时刻医院的车辆数最多为229辆。
所以,医院至少需要有229个车位才能够使得每一位患者的车到停车场就有车位停车。
对于问题2,对于问题3,根据问题1结果可知医院至少要有229个车位才能使患者车到就有车位停车,而由问题2的结果可知,新建的停车场最多只有162个停车位,远远不能满足实际需要。
所以问题可转化为从政府部门、医院以及患者的角度提出一些可行性的建议来解决这个问题。
政府部门可以从建设新的停车场,开设便利的公交路线等方法来解决这一问题;医院可以通过合理利用医院内部的土地,为医护人员的上班提供便利等方法老解决这一问题;患者可以有意识的不占用停车位,按规定停车,尽可能的乘坐公交车或出租车来医院就诊。
关键词:一、问题重述问题背景:随着现代技术的发展,人民生活条件的不断改善,小轿车的普及率越来越高. 患者自己开车到医院看病的情况也越来越普遍. 然而, 福州市的医院普遍存在停车位不足, 患者停车难的问题.某医院原有若干个停车位, 零散分布于院内建筑楼房四周以及道路两侧. 现医院经重新规划整合,拆除部分旧楼,在门诊大楼旁整出一个长方形地块(见附录一),准备建公用停车场,用于患者停放小轿车.该医院8:00开始门诊, 挂号从7:30开始, 每个患者平均门诊时间1小时30分钟(包括候诊、问诊、缴费和取药). 表1(见附录二)是某一周每天从7:30-11:30每5分钟统计的到达车辆数据。
1987B停车场问题-赵轶星——大学生数学建模竞赛
1987:停车场问题在新英格兰镇有一个位于街角处、面积100×200平方英尺停车场,场主请你设计它的布局,即设场地上的线怎么画的方案。
容易理解,如果将汽车按照与停车线构成直角的方向,一辆紧挨一辆地排列成行,则可以在停车场内塞进最大数量的汽车。
但是对于缺乏经验的司机来说,按照这种方式停靠车辆是有困难的,它可能造成昂贵的保险费用支出。
为了减少因停车造成意外损失的可能性,场主可能不得不雇用一些技术熟练的司机专门停车。
另一方面,如果从通道进入停车位有一个足够大的转弯半径,那么,看来大多数的司机都可以毫无困难地一次停车到位。
当然,通道越宽,场内所能容纳的车辆数目也就越少,这将使得场主减少收入。
1解决一个新英格兰镇的停车场问题摘要给定一个100×200平方英尺的场地,我们分析的目标是确定一种停车场空间的配置方案使得从停车场获得的收入最大。
我们需要考虑专职停车和自助停车两种方案。
自助停车是更好的选择,但是需要一个服务员来收停车费。
为了求得停车场最大的停车数量,我们测试了停车空间的角度从45°到90°的情况。
在如果通道的转角的数量越少,能获得越多空间的假设下,停车场配置的预算的数量可以缩减为7,。
首先,我们分析不考虑入口,出口和服务员的情况。
我们找到了一种能容下76个停车位的配置。
当入口和收费所都考虑进来时,我们的配置相对其他的配置能有更多的停车位(75)。
在我们最后的方案中,移动的许可、下雪时暂时的布置和灯柱的空间都被考虑了。
问题重述1给定一个在新英格兰镇的100×200平方英尺的在转角处的停车场,设计一种配置方案使得停车位最大并且在车场里驾驶的难度最小。
基本假设1、车是自助停车的。
雇佣一个技术熟练的司机来停车的花费对于增加的停车位而增加的收入来说多太多了。
2、停车场里的路都是单向的,这是为了减少通道的宽度和路的总面积。
在这种方法下,停车场的空间可以最大化。
3、入口和出口的位置决定于停车场处于街道转角的位置。
停车场泊位设计数学模型模板
停车场的泊位设计数学建模学号:1407022046 班级:14数学与应用数学2班姓名:刘桃摘要:“停车场的泊位设计”数学模型是利用数学模型的计算来规划出一种使用更合理、利用率高的停车场车位停泊方案。
近几年来,随着人们生活水平的提高,私家车的数量越来越多,汽车的停泊就成为一个越来越重要的问题,如果汽车停泊问题不能合理的解决,将会影响到汽车的使用。
许多大型公司或者是商场门前,都设有自己的停车场,停车场的面积是有限的,而我们希望的就是在这有限的面积内尽可能停放更多的汽车。
当然,停放尽可能多的汽车只是建造停车场时一个需要解决的问题,一个比较成功的停车场还需要具备的就是良好的汽车疏导能力,这就需要在停车场设计时更合理的安排汽车的停放位置。
当停车场面积一定的时候,合理安排空间使得更多的车辆能够停泊进来。
此次建立的模型是通过探究车辆停放角度与停车场面积的方程,继而对面积函数进300*100m的停车场最佳泊位情况,进而行求解,得到车位最佳设计角度,解出2推广到一般的2*s tm,同时对车型进行分类,分别计算小轿车、小型车、大型车三种停车情况。
关键词:车辆停放角度;层次分析;最优方案。
正文1、问题重述1.1自20世纪90年代以来, 我国经济呈现出持续高速发展态势, 家用小汽车更以惊人的发展速度进入普通居民家庭。
但人们在享受汽车所带来的便利和快捷的同时, 又必须面对由此所引发的一系列问题, 其中停车问题就是越来越突出的问题之一。
停车场泊车位规划是指在有限的空间区域内,设计车位布局,尽可能多地发挥空间效率与时间效率。
停车泊位设计考虑的因素较多,如平均车位占面积,车辆出入泊位难易程度,停车场内部道路畅通程度等等。
请设计一个完整的指标体系对停车场效度进入评价。
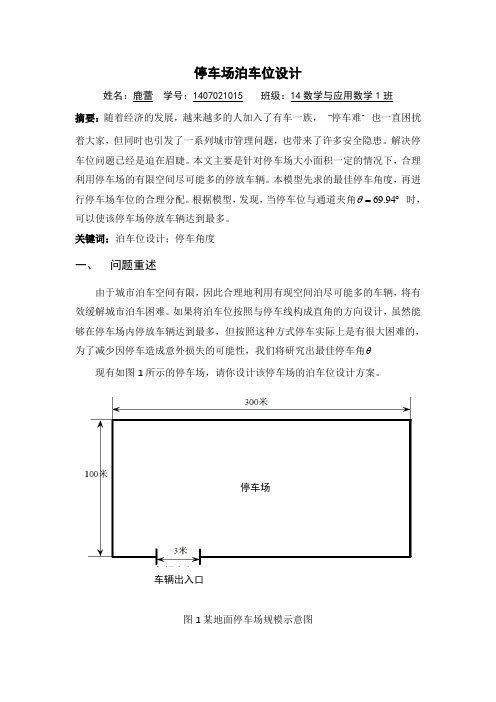
现有如图1所示的停车场,请你设计该停车场的泊车位设计方案;如果图1中的停车场宽度和长度分别为未知量,s t米,请你重新设计你的方案。
100米300米3米停车场图1某地面停车场示意图1.2停车场的整体规划。
关于停车场数学建模问题汇总

承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是(从A/B/C中选择一项填写):我们的参赛报名号为(如果赛区设置报名号的话):所属学院(请填写完整的全名):参赛队员(打印并签名) :1.2.3.日期: 2013 年 11 月 2 日评阅编号(教师评阅时填写):汽车车库库存的优化方案摘要本文研究的是关于汽车车库库存的问题,通过分析汽车参数以及车库数据,对车库进行合理的规划,建立了倾斜泊车模型、单向排列模型、交叉排列模型,利用AutoCAD对以上模型进行逐一的分析,分别回答了题目所给的所有问题。
针对问题一,首先分析了传统平行泊车的弊端,平行泊车难度较大,需要司机较高的驾驶技术,因此,我们建立了倾斜泊车模型。
查阅了相关汽车的资料并根据汽车的参数了解汽车的最小转弯半径。
其次通过对车库空间利用率以及道路通畅度的综合考虑,我们认为当停车位与通道成一定夹角时效果最佳,并利用最小的转弯半径求得极限角度。
最后根据实际环境中的不确定因素,我们将停车位大小适当进行增加,大大提高了安全性。
针对问题二,首先,根据题目中所给条件,即可以把车子先行调出,然后再调动内部的车,使内部车辆可以驶出。
为了进一步提高车库的利用率,我们决定设计一个去掉通车道,只保留消防车道的方案。
其次,我们根据停车位不同的排列方式设计了两种不同的模式,即单向排列模型及交叉排列模型。
分别得出这两种模型的函数关系式,再通过小轿车和商务车两种车位所占面积,小轿车和商务车驶入停车位最佳角度等情况,分别计算出两种模型各能停多少辆小轿车和商务车在车库中。
数学建模案例X城中心停车问题
不可行性费用
对于停车时间不长的停车者(k=1.2.3) ,我们可以不安排他们 在 m=1 和 m=3 的停车场地(这两类停车场地只为全日停车者服务) 停 车。 因此, 为了消除这种安排的可能性, 可将相应的“不可行性费用” 定为一个“大数” (而对于其他情况,不可行性费用则为零) 。
7
模型 将现有停车位置指派给各类停车者的模型具有运输模型的结构。 令 Xij 表示第 j 类停车者分配到的第 I 类停车位置的个数,我们的目标
四.问题的分析与相关数据
指定属于第 j 类停车时间的一位司机在第 i 类停车场停车的费用 系数为 Cij,它包括下列各项:
5
步行费用
在两个地段间不行的费用用下列公式计算:
2(1.5)(两个地段间的距离)(流通系数)(每车平均人数) 在此公式中,2 这个因子表示必须步行两次(往返各一次),步行 一米折合的费用假设定为 1.5 元人民币,又假设被指定就在目 的地所在地段停车的人步行距离为 50 米。流通系数是指在同一停车 位置停车的平均车辆数, 它说明一天里一个特定的停车位置先后可供 多少辆车子停车,流通系数的值取决于停车时间的长短,它们由下表 给出。
上面两张表中的数字也是根据 X 市政府以前搜集的数据得出的。
保管费用
这种费用是和停车房管理员们商量后得出的。一年里的工资, 电
6
费,电话费等平摊到 365 天以后,就得出“24 小时”的保管费,其 中三分之二则摊算在上午 8:00 到晚上 6:00 这段时间内,其他类型 的停车场地的保管费用也用类似的办法算出。下表列出了这类费用:
表3
m=5 683 m=6 238 m=7 97 115 64 98 50 109 34
3
40 31 16 64
侧位停车数学建模

一.问题重述侧位停车是指驾驶员在停车位时利用自身的倒车技巧,使车辆按照一定的行驶轨迹,安全的,在不触碰到两边车辆的前提下,让自己的车停到规定好的停车位上。
侧位停车常常会出现许多两车碰擦的情况,通常时由于驾驶员技术的生疏或者不熟练,亦或是停车位长宽大小建造的不科学。
正确的科学的停车位建设,能在给驾驶员提供充足的停车空间的条件下,尽可能的节约场地,对于当今停车位紧缺的问题具有相当大积极意义。
现在我们根据题中所给的条件,研究停车位宽度一定时,车位长度最小的情况,以及保证车辆正常停车时,停车位长度与车辆可供行驶的道路宽度的关系,建立数学模型解决以下问题:问题(1),在可供行驶的道路宽度足够大时,求车位长度的最小值。
汽车如果可供行驶宽度y足够大,车辆要能够停进这个车位(车辆只能倒车,不能前进),车位长度x最小为多少?假设车辆的初始位置与车位平行,求出车辆的初始位置、倒车入库过程中方向盘位置a的取值变化和车前轮的轨迹。
(2)如果y不是足够大(当然y肯定大于车宽),那么x和y满足什么条件的情况下,车辆只通过倒车就能停进车位(车辆只能倒车不能前进)?(3)设y=2000mm,求出倒车过程中方向盘调整次数最少时x的最小值,以及此时倒车过程中a的取值变化。
二.问题分析城市中建立起愈来愈多住房区,超市,商场,同时又由于人民收入水平的增加,越来越多的人加入到了“有车一族”的行列。
城市建设和有车一族的人们对停车位的需求越来越大。
而城市里的土地资源的紧张,则对我们如何规划一个提高停车位利用率停车位提出了一定的要求。
在此同时,由于一个个新手驾驶员的技术不熟练和内在的不自信,建设的停车位又要能容许他们的操控误差。
针对问题(1),我们考虑到了在停车位宽度一定的情况下,汽车恰好切入停车位的情况(忽略了汽车倒车时速度的大小)。
此时利用一定的几何知识,我们可以求得所求的停车位最小长度。
同时结合汽车的最小转弯半径,我们确定了汽车转弯的圆心,并建立了直角坐标系,求得汽车停车时前轮的运动轨迹。
小区车位分布的评价和优化模型数学建模题目

小区车位分布的评价和优化模型数学建模1. 引言小区车位分布对于居民的生活质量和小区管理的效率有着重要的影响。
合理的车位分布可以减少居民停车难的问题,提高小区的交通秩序,并且能够有效利用空间资源,达到最佳的管理效果。
对小区车位分布进行评价和优化是非常有必要的。
2. 小区车位分布的评价我们需要评价小区的车位分布情况。
这需要考虑几个因素:1) 总车位数:为了评价车位的充裕程度,需要统计小区的总车位数。
2) 车位利用率:统计小区内停车位的使用情况,包括每天的不同时段和不同区域的使用情况。
3) 车位分布:根据小区地图和停车场的布局,评估车位分布的合理性,是否满足居民的停车需求。
4) 居民满意度:通过调查居民的意见和反馈,了解他们对小区车位分布的满意度和不足之处。
3. 小区车位分布的优化模型数学建模基于以上评价,我们可以建立数学模型来优化小区车位分布。
1) 车位分布模型:根据小区的地理信息和居民的停车需求,可以建立一个数学模型来优化车位分布。
考虑到人流量和车辆的停放习惯,可以使用最优化算法来调整车位的位置和数量,以提高车位的利用率和满足居民的需求。
2) 停车管理模型:结合智能停车管理系统,可以建立一个数学模型来优化停车管理策略,包括分时段的停车收费策略和车位预约系统。
这可以帮助小区提高停车管理的效率,减少拥堵和混乱的现象。
3) 车位规划模型:通过对小区停车场的规划和设计,可以建立一个数学模型来优化停车位的布局和数量,达到最佳的效果。
4. 个人观点和理解我认为小区车位分布的评价和优化模型数学建模是一个非常具有挑战性和实用性的课题。
通过数学建模和优化算法,可以帮助小区管理者制定更科学、合理的停车管理策略,提高小区的管理效率;同时也可以提高居民的停车体验,改善小区的居住环境。
5. 总结与回顾通过本文的评价和优化模型的建立,我们可以看到小区车位分布的重要性,以及数学建模在优化解决这一问题上的潜力。
希望本文可以为小区车位分布的评价和优化提供一些有价值的思路和方法。
2021年数学建模c题
2021年数学建模c题
2021年数学建模C题:
题目:
题目描述:在某城市中,为了缓解交通压力,计划修建一条地铁线路。
该线路需要经过多个站点,并需要在每个站点设置停车位。
任务:
1. 根据给定的站点和停车位需求,为每个站点分配停车位,并确定所需的总停车位数。
2. 考虑到站点之间的距离和停车位的需求,为每个站点设计合理的停车位布局。
3. 分析停车位数量和站点数量之间的关系,以及站点之间距离对停车位布局的影响。
数据:
1. 给定每个站点的停车位需求(单位:个):[30, 40, 50, 60, 70, 80, 90, 100, 110, 120]
2. 给定每个站点之间的距离(单位:km):[[0, 2, 3, 4], [2, 0, 2, 3], [3, 2, 0, 1], [4, 3, 1, 0]]
注意:以上数据仅为示例,实际数据可能有所不同。
要求:
1. 根据给定的数据,为每个站点分配停车位,并确定所需的总停车位数。
2. 为每个站点设计合理的停车位布局,并给出布局示意图。
3. 分析停车位数量和站点数量之间的关系,以及站点之间距离对停车位布局的影响。
4. 给出优化建议,以提高地铁线路的运营效率。
数学建模赛题 露天停车场停车位的优化设计
B题露天停车场停车位的优化设计
随着社会经济的快速发展,家用小轿车数量进入快速增长期,随之而来的城市停车问题日益突出,逐渐成为我国各城市普遍面临问题之一。
停车场受场地条件限制,仅能提供有限的停车位,在确保车辆自由进出的情况下,如何综合考虑各方面因素设计停车场的停车位,使之能够获得较大的停车能力是一个值得研究的课题。
驾驶者在停车时需要足够的空间,如果通道过宽,驾驶者可以从容停车,此时停车场能容纳的停车位数量将减少,如果通道过窄,不易于驾驶者停车。
因此,可将停车位设计成一定的角度,这里的角度是指停车位与停车通道的夹角。
停车位的排列方式有平行式、斜列式、垂直式等。
现以家用小轿车为例,假设家用小轿车的转弯半径为5.5米,当垂直停放时需要长度为5.5米,宽度为2.5米的位置(其中包括停车位标志线)。
请利用所学知识,完成以下问题:
1.图1给出长79米,宽26.5米的停车场,在规定车辆出入口方向的情况下,请对该停车场进行设计。
建立合理的数学模型,使得停车位数量最多,给出该停车场设计方案及平面示意图,提供可运行的源程序。
2.某大型商场周边场地平面示意图如图2所示,大型商场停车场的设计需要考虑消防等因素。
在限定出入口设计位置的情况下,请对该停车场(含出入口)进行设计。
建立合理的数学模型,使得停车位数量尽可能多,给出该大型商场的停车场设计方案及平面示意图,提供可运行的源程序。
3.假设不限定某大型商场停车场出入口设计位置,请对图3所示的大型商场停车场(含出入口)进行设计。
建立合理的数学模型,使得停车位数量尽可能多,给出该大型商场的停车场设计方案及平面示意图,提供可运行的源程序。
图1
图2
图3。
小区车位分布的评价和优化模型数学建模题目
文章主题:小区车位分布的评价和优化模型数学建模题目在城市日益增长的停车需求下,小区车位分布的评价和优化模型成为了一个备受关注的话题。
本文将从多个角度对该主题展开深入探讨,为读者提供一个全面的视角。
1. 小区车位分布现状的评价小区车位分布对居民和外来车辆的停车需求起着至关重要的作用。
在评价小区车位分布现状时,我们需要考虑以下几个方面:- 小区内停车位的数量和分布- 不同时间段停车需求的变化- 小区内不同用户裙体的停车需求特点- 小区周边道路交通情况对停车需求的影响2. 小区车位分布优化模型数学建模在对小区车位分布进行优化时,数学建模是不可或缺的工具。
我们可以考虑以下几个数学模型:- 线性规划模型:根据小区内停车位数量和分布情况,构建线性规划模型,以最大化停车位利用率为目标。
- 动态规划模型:考虑不同时间段停车需求的变化,构建动态规划模型,以实现最优停车位分配。
- 车辆流模型:结合小区周边道路交通情况,建立车辆流模型,优化小区停车位的分布和规划。
3. 个人观点和总结在我看来,小区车位分布的评价和优化模型数学建模是一个复杂而又具有挑战性的课题。
通过对车位分布现状的评价和数学建模的优化,我们可以更好地满足居民和外来车辆的停车需求,提高停车位的利用率,减少交通拥堵,改善居民生活质量。
通过本文的深入探讨,相信读者已经对小区车位分布的评价和优化模型数学建模有了更深入的理解。
我希望读者能够在实际中应用相关知识,为城市的停车管理做出更大的贡献。
在城市日益增长的停车需求下,小区车位分布的评价和优化模型成为了一个备受关注的话题。
尤其是在大城市,停车位资源紧张,小区车位分布的合理性和优化将直接影响居民的停车体验和社区交通秩序。
评价小区车位分布现状并建立优化模型数学建模,对于改善停车问题、优化交通流和提高城市居民生活质量具有重要意义。
一、小区车位分布现状的评价1. 小区内停车位的数量和分布评价小区车位分布的首要任务是了解小区内停车位的数量和分布情况。
数学建模停车位规划与评价
承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): B我们的参赛报名号为(如果赛区设置报名号的话):所属学校(请填写完整的全名):参赛队员(打印并签名) :1. 李肯187****91172. 蔡春婷3. 王露指导教师或指导教师组负责人(打印并签名):日期:2011年 08月 25 日赛区评阅编号(由赛区组委会评阅前进行编号):某停车场泊位规划与效度评价摘要对于停车位规划问题我们引入了坡度因素,提出了三种模型,分别为“三排斜列坡度式”“斜列交错式”和“两排垂直式”,我们依据空间效率最大化的原则,精确作图,合理分区,最后发现“两排垂直式”能容纳的停车位最多,共100个。
然后我们利用模糊分析法建立了停车场评价系统模型,其中使用了层次分析法确定权系数向量,并创造性地将停车场设计与评语相关联,建立了因素评语表,构建了模糊评价矩阵。
在求解一级、二级综合评价矩阵时,比较了“主因素决定型”“主因素突出型”和“加权平均型”三种计算方法后,发现用“加权平均型”所得的结果最为准确,并判断“两排垂直式”模型的评价为:很好。
由于为露天停车场,且不考虑车位的费用差异,那么车主对于车位的评价,其心理因素应包含防盗、防刮擦、距出入口距离、是否遮阴等。
我们用目标规划的思路,用三个优先级依次递增的指标进行评价。
在筛选车位时我们又使用了决策论中淘汰“次优方案”的思路,根据优先级逐渐把“次劣”泊车位排除,最后发现在我们选用的规划设计中,靠花坛停放的最右侧的两个车位是最劣车位,最不受欢迎。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
停车场泊车位模型摘要现如今随着机动车辆的增加,车辆停放困难的问题逐渐加重,我们现在就来讨论New England的一个镇上的某停车场为场景的数学模型。
对单个停车位进行分析得出车位最佳角度,然后对整个停车区域进行规划得出车位布局,再用模糊评判来进行停车位效度评价,比较好的解决了问题。
在对停车场泊车位优化设计的模型中,我们考虑一种把车间距空间并入车辆所在的空间的方式,形成一个矩形,因其可以在空间无间隙密铺从而简化分析过程。
通过分析单个车辆进入泊车位的车辆状态得到车辆的最小转弯半径,再通过非整数规划得到单个车位最佳设计角度,然后拓展到整个规划区域,最后得出停车场泊车位的整个规划,最终的设计方案总共能够提供98个泊车位,空间时间利用效率较高。
对停车场的车位效度评价,采用模糊评价模型,从停车场的安全性、便捷性和效率性三个方面来建立效度评价指标体系,得到三个一级指标,再从进出停车场、进出停车位和停车场内行车等方面考虑建立二级指标,得出比较全面的效度评价指标体系,最后再根据指标体系用层次分析法和模糊评价来进行车位效度评价。
关键词:层次分析模糊评价转弯半径停车角度1、问题的叙述在New England的一个镇上,有一位于街角处面积100 200平方英尺的停车场,场主请你代为设计停车车位的安排方式,即设计在场地上划线的方案。
容易理解,如果将汽车按照与停车线构成直角的方向,一辆紧挨一辆地排列成行,则可以在停车场内塞进最大数量的汽车,但是对于那些缺乏经验的司机来说,按照这种方式停靠车辆是有困难的,它可能造成昂贵的保险费用支出。
为了减少因停车造成意外损失的可能性,场主可能不得不雇佣一些技术熟练的司机专门停车;另一方面,如果从通道进入停车位有一个足够大的转弯半径,那么,看来大多数的司机都可以毫无困难地一次停车到位。
当然通道越宽,场内所容纳的车辆数目也越少,这将使得场主减少收入。
2、问题分析一般来说,想尽可能的把车塞进停车场,最好的办法就是以垂直停靠的方式将车一辆挤一辆地排成行,但是这样停放的后果就是车辆不能自由出入,只有后进入的车辆全部先出去了,先进入的车才可以离开停车场,显然不符合实际的需求。
因而,为了使汽车能够自由地出入停车场,必须设立一定数量具有足够宽度的通道,并且每个通道都应该有足够大的“转弯半径”,而通道越宽越多,就会使得容纳的车辆数越少。
所以我们的问题就是要确定在满足车辆能够自由进出的实际需求下,如何进行停车位置和车行通道的设计,才能够停放更多的车辆,从而做到既方便停车又能获得最大的经济效益。
通过对单个停车位进行分析,得到每辆车占据的停车场面积函数,由车辆所占的停车位面积和所占通道面积两部分组成,面积函数可以化为角度的一次函数,再对面积函数进行数学求解可以到车位最佳设计角度。
把单个车位的设计模型拓展开到整个规划区域,排列得到规划区域的车位设计。
对停车场的效度评价,评价一个停车场停车位设计的好坏,还与整个停车场有关。
对一个停车场的评价,首先考虑到停车是否安全,包括进出停车场行车过程的安全程度和停车安全程度,这里主要考虑停车过程的安全程度。
其次,要考虑到停车场的效率,如果停车场空间利用率低,则不能充分利用停车场的资源,这样停车场的利用率肯定会比较低,效度评价也会不好,同样,如果进入停车场泊车需要等待很长时间,那么这个停车场肯定效度不好,所以时间和空间的利用率直接关系到停车场的效率性。
另外,去停车场泊车的方便程度也与停车场的效度密切相关。
3、模型假设和符号说明3.1模型假设1)进入停车场的车型只考虑小型车,小型车的详细指标参见附录二。
2)假设每辆车都能够按规定停车,不超出车位线。
,)Tc作的归一化处理n最大特征根个因素的模糊综合评价向量4、模型建立4.1停车场泊位规划模型4.1.1单辆车停车位最佳角度考虑到汽车从通车道驶入车位一般得转弯,所以车辆的最小转弯半径也是停车场设计所要考虑的重要参数。
所谓最小转弯半径,就是汽车转弯时转向中心到汽车外侧转向车轮轨迹间的最小距离。
根据实际调查,可设小轿车的最小转弯半径为1 5.5C =米,与此同时,汽车转弯时转向中心到汽车内侧转向车轮轨迹间的最小距离为21 1.7 3.8C C =-=米,如图1所示。
对于每一个车位,为了便于该车位上的小轿车自由进出,必须有一条边是靠通道的,设该矩形停车位的长边与通道的夹角为(0)2πθθ≤≤,其中2πθ=便是车辆垂直从通道驶入车位,0θ=就是车辆从通道平行驶入车位,即平时所说的平行泊车。
为了留出通道空间和减少停车面积,显然,我们可以假设该通道中的所有车位都保持着和该车位相同的角度平行排列,如图2所示。
图1上图中,小轿车是自东向西行驶顺时针转弯θ角度驶入车位的。
我们来具体研究一下小轿车驶入车位的情况,见图3,其中1C 为最小转弯半径,R 为通道的最小宽度。
我们假定小轿车的最外端在半径为1C 的圆周上行驶,且此时轿车的最内端在半径为2C 的圆周上随之移动,然后以θ角度进入停车位,所以通道的最小宽度12cos R C C θ=-。
在保证车辆能够自由进出的前提下,本着要求通道宽度尽量小的原则,我们来看一下一排车位之间的各个数据,见图4。
图3图每辆车均以角度θ停放,用W 表示小轿车停车位宽度,L 表示小轿车停车位长度(这里L 的最上方并没有取到最上端是考虑到车身以外的小三角形区域可以留给对面停车位使用),o L 表示停车位末端的距离,易见他们分别是停车角θ的函数,且有sin W C W θ= 1sin cos 2L W L C C θθ=+ 01(cot )cos 2L W L C C θθ=+ 11cos 2W L C θ= 现在按照图4所示,计算一下每辆车占据的停车场面积()S θ.考虑最佳排列的极限情况,假设该排车位是无限长的,可以忽略该排车位两端停车位浪费掉的面积012L L •,因为它们被平均到每个车位上去的公摊面积很小,可以不计。
从车辆所占的停车位来看,它占据的面积为W L •,另外,它所占的通道的面积为W R •。
考虑到通道对面(也就是图4的下部)也可以有类似的一排车位可以相互借用此通道,所以可以对占用的通道面积减半,于是我们得到:()212cos cos 122sin 2sin 2sin W W W W L C C C C C S WL WR C C θθθθθθ=+=++- (1) 我们的目标就是求出()S θ的最小值。
将1 5.5C =米,2 3.8C =米,5L C =米, 2.5W C =米代人(1)式,可得 () 6.875 1.625cos 12.5sin sin S θθθθ=+-,()21.625 6.875cos sin S θθθ-'=,图4所以当 1.62513cos 6.87555θ==,即76.33θ︒≈时,()S θ达到最小,且(){}min 19.18S θ=平方米。
需要说明的是,当0θ=时车位与车道平行,此时每辆车都得采用平行泊车的方式进入车位,这是现实生活中马路边的停车位常见的情况,在一般的停车场中几乎很少看到。
平行泊车对驾驶员的技术要求较高,所以我们不考虑这样的情况。
上述对车位的局部分析表明,当停车位与通道夹角76.33θ︒≈时,可以使每单位车辆占据停车场的面积达到最小。
4.1.2整体车位规划根据中华人民共和国行业标准中汽车库建筑设计规范(Design Code for Garage JGJ100-98)可知汽车与汽车、墙、柱、护栏之间最小净距如下表:5、模型的求解图6为某公共场所附设的停车场,它是一个长90米,宽45米的矩形区域,该矩形区域的四个角落有照明灯设置,其占据矩形角上的形状为边长2.5米正方形,见图6的星号区域。
区域南边,西边,北边是围墙,东边是马路,这是可以作为停车场出入口的唯一的一条边。
根据对当地实际情况的调查,该停车场位设计应考虑5至6个大型客车车位,其余都作为小轿车车位设计。
现在我们就按照上述要求来对这块停车场进行车位的具体安排。
90米的停车场长边可以当作足够长的边来看待,我们将90米为一排来设计小轿车的车位,即每排车位与矩形的长边平行。
在理想情况下,根据第一部分讨论可知,最佳设计下的车位长度为:1sin cos 5sin 76.33 1.25cos76.33 5.1542L W L C C θθ︒︒=+=+=(米) 停车场通道宽度为:12cos 5.5 3.8cos 76.33 4.602R C C θ︒=-=-=(米),所以,理想情况下的一组(即两排车位中间加一条行通车道)的宽度约为:214.91L R +=(米)于是,45米宽可以考虑安置三组这样的车位,如图6的Ⅰ,Ⅱ和Ⅲ。
在小轿车的总体布局确定下来后,我们再来具体确定大型客车的车位。
考虑到大型车的转弯半径比较大,借用专门为小轿车车位设计的通道是肯定不行的。
相对来说,大型客车停车位只占总停车位的很小一部分,在设计停车场的位置市,为了节省面积以增加车位数,应该将所有大客车位置放在一块,同样以矩形并排的形式放置。
大客车在停车场中的停放方式也可以采用直角停放的停车方式,并按照其特殊的位置设置特殊宽度的通道。
另外考虑到其进出上的困难情况,一般可安置在停车场的出口部分,例如,将其安排在东边靠马路处(注:东边临街,没有围墙),且垂直东边的马路横向占用小轿车的车位设置6个大型客车车位,45大客车可直接由马路开进停车位,见图6的右边6个横向车位。
剩下的事情就是得解决出入口问题了,由于只能在东边设置出入口,并且Ⅰ,Ⅱ,Ⅲ三组区域为相互能借助对方区域的车位排列位置设置,通道形式方向应该间隔,即Ⅰ向东,Ⅱ向西,Ⅲ向东,或者Ⅰ向西,Ⅱ向东,Ⅲ向西。
为此,必须在停车场的最西边设置南北走向的一排通道,以便让Ⅰ,Ⅱ,Ⅲ区车位的车辆都能够换向出入,具体可以参照图6的设置。
最后,考虑到既然在最西边已经设置了南北走向的一排通道,我们可以在该通道的西边设置一排车位,此时该车位设计的车辆出入可以占用南北通道,所以这排车位的设计是最合理的,如图6中的区域Ⅳ.根据如上的分析,我们对该停车场的车位大致设计成图 6.东边的中部为入口,北部和南部为出口,这样,即使在车辆较多的时候不至于难以驶出,通道方向也如图6所示。
大型客车的车位已经确定为6个,小轿车车位的个数我们将根据Ⅰ,Ⅱ,Ⅲ的车位角度θ进行变化。
由于东西走向的通道和南北走向通道已经是垂直拐弯,所以毫无疑问,区域Ⅳ的车位将垂直排列,去掉两边照明灯设置后西边宽度为40米,正好可以设置16个车位(2.5米宽和5米长),垂直于西边。
我们可以计算出西边通道的宽度为12cos 5.52R C C π=-=(米)。
考虑到对称性质,我们设横向的6排的小轿车位个数分别是1X ,2X ,2X ,2X ,2X ,1X 个,并建立如下的小轿车车位个数模型:12max 2416X X X =++1020325 2.5905 5.5290..63cos 450,1,202W L W i B L X W L X W L B s t L R C X i θπθ≤⎧⎪+++≤⎪⎪++++≤⎪⎨++≤⎪>=⎪⎪≤≤⎪⎩且为整数 (4) 将公式sin W C W θ=,1sin cos 2L W L C C θθ=+,01(cot )cos 2L W L C C θθ=+,12cos R C C θ=-和数据5L C =, 2.5W C =,1 5.5C =,2 3.8C =,12.5L B =,3W B =分别代人(4)式,化简后可得:12max 2416X X X =++ 21221820sin 5cos 33sin 2sin cos 0.5cos 26.8sin 4sin cos cos ..300sin 14cos 2850,1,202i X X s t X i θθθθθθθθθθθθπθ≤+⎧⎪≤--⎪⎪≤--⎪⎨-≤⎪>=⎪⎪≤≤⎪⎩且为整数 (5) 对于模型(5),如直接利用计算机编程求解会遇到一些麻烦,先是涉及θ的变化,然后又涉及1X 和2X 。