最新六章节轮系及其设计
合集下载
机械原理第6章轮系及其设计(精)
2. 差动轮系 在图6.2所示的周转轮系中,若中心轮1、3均不固定,则整个
轮系的自由度 F 3 4 2 4 2 2 。这种自由度为2的周转轮系称 为差动轮系。为了使该轮系具有确定的运动,需要两个原动件。
此外,周转轮系还可根据其基本构件的不同加以分类。设轮
系中的中心轮用K表示,系杆用H表示。由于图6.2所示轮系中有 两个中心轮,所以又可称其为2K-H型周转轮系。而图6.3所示 轮系又可称为3K型周转轮系,因其基本构件是1、3、4三个太阳
H,则其转化轮系的传动比 iAHB 可表示为
iAHB
AH BH
A H B H
f (z)
(6.3)
若一个周转轮系转化轮系的传动比为“+”,则称其为正号
机构;反之则称其为负号机构。
●6.3.3 转化轮系传动比计算公式的注意事项 使用转化轮系传动比计算公式的注意事项如下: (1) 式(6.3)只适用于转化轮系中齿轮A、齿轮B和系杆H轴线平
轮系的传动比计算,不仅需要知道传动比的大小,还需要确 定输入轴和输出轴之间的转向关系。下面分以下几种情况进行讨 论。 1. 平面定轴轮系
如图6.1所示,该轮系由圆柱齿轮组成,其各轮的轴线互相平 行,这种轮系称为平面定轴轮系。在该轮系中各轮的转向不是相
同就是相反,因此它的传动比有正负之分。所以规定:当两者转
即
i15
1 5
i12
i2'3
i3' 4
i45
z2 z3 z4 z5 z1z2' z3' z4
上式表明:定轴轮系的传动比等于组成该轮系的各对啮合齿
轮传动比的连乘积;其大小等于各对啮合齿轮中从动轮齿数的连
机械原理第六章轮系及其设计

则相邻两轮之间的夹角为:φ=2π/k
3 O1 2
A φφ O2
θ 1
A’
在位置O1装入第一个行星轮, 固定轮3,转动系杆H,使φH=φ, 此时,行星轮从位置O1运动到位置O2, 而中心轮1从位置A转到
位置A’,转角为θ。
∵ θ/φ=ω1 /ωH =i1H =1+(z3 /z1 )
=(1+ z3 ) z1 z3 2
1 3
1 3
3'
2
2' 4
13
H
输出
1'
4、联立求解:
i1H
1 H
z1
z3 z1
1 z1z2 z3
z2 z3
第二十二页,编辑于星期日:十四点 四分。
例6-7
(H,5为一整体)
H
电动卷扬机减速器
z1=24,z2=48,z2'=30, z3=90,z3'=20,z4=30, z5=80,求i1H
(四)联立 i1H 31
n1 1450r / min
nH
n1 i1H
1450 46.77r / min 31
第二十三页,编辑于星期日:十四点 四分。
轮系的功用 实例比较
1)获得较大的传动比,而且结构紧凑。 一对齿轮i<8, 轮系的传动比i可达10000。
2)实现分路传动。如钟表时分秒针;动画:1路输入→6路输出
40 30
4 3
n1'
3 2
n4
n3'
3 4
n4
(b) (c)
(3)联系条件
n1' n1, n3' n3
3 n1' n1 2 n4
3 n3 n3' 4 n4
3 O1 2
A φφ O2
θ 1
A’
在位置O1装入第一个行星轮, 固定轮3,转动系杆H,使φH=φ, 此时,行星轮从位置O1运动到位置O2, 而中心轮1从位置A转到
位置A’,转角为θ。
∵ θ/φ=ω1 /ωH =i1H =1+(z3 /z1 )
=(1+ z3 ) z1 z3 2
1 3
1 3
3'
2
2' 4
13
H
输出
1'
4、联立求解:
i1H
1 H
z1
z3 z1
1 z1z2 z3
z2 z3
第二十二页,编辑于星期日:十四点 四分。
例6-7
(H,5为一整体)
H
电动卷扬机减速器
z1=24,z2=48,z2'=30, z3=90,z3'=20,z4=30, z5=80,求i1H
(四)联立 i1H 31
n1 1450r / min
nH
n1 i1H
1450 46.77r / min 31
第二十三页,编辑于星期日:十四点 四分。
轮系的功用 实例比较
1)获得较大的传动比,而且结构紧凑。 一对齿轮i<8, 轮系的传动比i可达10000。
2)实现分路传动。如钟表时分秒针;动画:1路输入→6路输出
40 30
4 3
n1'
3 2
n4
n3'
3 4
n4
(b) (c)
(3)联系条件
n1' n1, n3' n3
3 n1' n1 2 n4
3 n3 n3' 4 n4
第六章轮系及其设计
解:此轮系可看作由轮1、2、3 此轮系可看作由轮 、 、 和行星架H组成的行星轮系及 和行星架 组成的行星轮系及 由轮4、 、 、 和行星架 和行星架H组 由轮 、2'、2、3和行星架 组 成的另一行星轮系组合而成。 成的另一行星轮系组合而成。
3 H 1 4
组成的行星轮系中, (1)在1-2-3-H组成的行星轮系中,有: ) 组成的行星轮系中
定轴轮系的传动比= 定轴轮系的传动比= 所有从动轮齿数的连乘积 所有主动轮齿数的连乘积
结论
三、输出轴转向的表示 1、平面定轴轮系
有 动轮 数 乘 齿 的 积 ω1 m所 从 i= = (−1) ω5 所 主 有 动轮 数 乘 齿 的 积
m——外啮合的次数 惰轮:
z2 z3 z4 z5 z2 z3 z5 ω1 i15 = = −i12i23i3′4i4′5 = − =− ω5 z1z2' z3′ z4 z1z2' z3′
1
3 H
O 2 4 2′ ′
O
例:汽车后桥的差速器(直线) 汽车后桥的差速器(转弯)
汽车后轮中的传动机构
直线
n3 + n1 nH = = n4 2
n1 = n3 = nH
左拐弯
n3 + n1 nH = = n4 2
若
Z4 = 2Z5
则
n5 = 2n4
例2: 电动卷扬机减速器 Z1=24,Z2=48,Z2'=30, Z3=90,Z3'=20,Z4=30, Z5=80,求i1H
2. 实现变速传动
1 II 2
I 1' 2'
换档变速传动机构,在主动轴转速不变的条件下, 换档变速传动机构,在主动轴转速不变的条件下,通 过换档可使从动轴得到不同的转速。 过换档可使从动轴得到不同的转速。
3 H 1 4
组成的行星轮系中, (1)在1-2-3-H组成的行星轮系中,有: ) 组成的行星轮系中
定轴轮系的传动比= 定轴轮系的传动比= 所有从动轮齿数的连乘积 所有主动轮齿数的连乘积
结论
三、输出轴转向的表示 1、平面定轴轮系
有 动轮 数 乘 齿 的 积 ω1 m所 从 i= = (−1) ω5 所 主 有 动轮 数 乘 齿 的 积
m——外啮合的次数 惰轮:
z2 z3 z4 z5 z2 z3 z5 ω1 i15 = = −i12i23i3′4i4′5 = − =− ω5 z1z2' z3′ z4 z1z2' z3′
1
3 H
O 2 4 2′ ′
O
例:汽车后桥的差速器(直线) 汽车后桥的差速器(转弯)
汽车后轮中的传动机构
直线
n3 + n1 nH = = n4 2
n1 = n3 = nH
左拐弯
n3 + n1 nH = = n4 2
若
Z4 = 2Z5
则
n5 = 2n4
例2: 电动卷扬机减速器 Z1=24,Z2=48,Z2'=30, Z3=90,Z3'=20,Z4=30, Z5=80,求i1H
2. 实现变速传动
1 II 2
I 1' 2'
换档变速传动机构,在主动轴转速不变的条件下, 换档变速传动机构,在主动轴转速不变的条件下,通 过换档可使从动轴得到不同的转速。 过换档可使从动轴得到不同的转速。
第六章 轮系及其设计
z3 1 H 1 z1
已知ωH ,可求出ω1 ,则 :
i1H
1 H
应用上式时应注意:
1)上式只适用于输入、输出轴轴线与系杆H的回
转轴线重合或平行时的情况。
2)式中“±”号的判断方法同定轴轮系的传动比
的正、负号判断方法相同。
3)将ωA、ωK、ωH的数值代入上式时,必须同时
1 ( n1 n3 ) 2
差动轮系的运动合成特性,被广泛应用于机床、计算 机构和补偿调整等装置中。
差动轮系可以将一个基本构件的主动转动按所需比例分解 成另两个基本构件的不同转动。
运动输入
rL n4 r rL n3 n4 r n1
运动输出
汽车后桥的 差动器能根据 汽车不同的行 驶状态,自动 将主轴的转速 分解为两后轮 的不同转动。
原周转轮系中 各构件的角速度
转化机构中各 构件的角速度
H H H H 0 1H 1 H
H 1
3
3H 3 H
周转轮系的转化机构为一定轴轮系,因此转化
机构中输入和输出轴之间的传动比可用定轴轮系传 动比的计算方法求出,转向也可用定轴轮系的判断 方法确定。
求解周转轮系 的传动比
计算该转化机构(定轴 轮系)的传动比:
i
H 13
z3 z3 z2 ( z )( z ) ( z ) 1 2 1
H 1 H 3
1 H 3 H
输入轴
输出轴
z3 1 H 3 H z1
构件名称 系杆H 中心轮1 中心轮3
H H H H 0 1H 1 H
第六章轮系及其设计

定轴轮系传动比的计算的公式:
i1k
= 1 k
=
n1 =从1到k中各对齿轮传动比的连乘积 nk 所有末轮齿数的连乘积
= 所有首轮齿数的连乘积
2.首、末轮的转向 *平面定轴轮系:
3 4'
3'
24
5
1
i1k
= 1 k
= (−1)m
z2 zk z1 zk−1
m为外啮合的对数
*空间定轴轮系:
2
首末轮轴线平行 首末轮轴线不平行
3
2
o2
H
1 3
(2)特点:有一方面绕自身的几何轴线O2自转,另一方面 又随同转臂H绕几何轴线O1公转的 行星轮。
(3)类型:
F=2 (中心轮都是转动的) F=1 (有一个中心轮作了机架)
二、行星轮系传动比的计算
-H
2 2 3
H H
1
o1
1
3
2
o2
H
o1
1
3
2
o2
H
1 3
构件名称
转臂H 中心轮1 中心轮3
1+ z6
z4
3'
1
5
3
以上涉及到的都为两个中 心轮一个转臂的行星轮系, 称为2K-H型行星轮系。
求双重周转轮系的传动比i1H
解: 双周转轮系特点是,至少有一个行星轮同时绕三个轴线转动,主周转轮系 (5-H-6,和1-2-H-6)的行星架内有一个副周转轮系(2’-3-4-h-6) 行星轮系( 5-H-6)
(2)
2'
i45
= 4 5
=
z5 z4
(4)
34
4' 5
第六章轮系
第6章 轮系
6.2 轮系的传动比 6.2.2 周转轮系的传动比
(2) 传动比计算方法 一般周转轮系转化机构的传动比 z2 zn 1 H H i1n n H z1 z n 1
行星轮系,ω1、ωn中一个为0(不妨设ωn=0),则上述通式改写为:
i1H n
(2) 传动比计算方法 一般周转轮系转化机构的传动比 z zn H i1H 1 2 n n H z1 z n 1 正号机构:
H 行星轮系传动比: i1H 1 i1n
i1nH>0的机构 i1H<1 iH1可能很大(0<i1H<1时),也可能是负数(i1H<0时); 效率总是小于转化机构效率,往往很低以至产生自锁; 可实现很大传动比,但不宜用于传递动力的场合。
ω3 2 H 1 3 ω1 2 H ωH 1 ω2 3
第6章 轮系
6.1 轮系的类型与应用 6.1.2 周转轮系
(2) 分类 根据自由度数的不同分类。 自由度为2的周转轮系差动轮系; 自由度为1的周转轮系行星轮系;
2 H 1 2 H 1
行星轮系
3
差动轮系
3
F=3n-2PL-PH F=3n-2PL-PH =3×3-2×3-2=1 =3×4-2×4-2=2
一个基本周转轮系至多只有三个中心轮
第6章 轮系
6.1 轮系的类型与应用 6.1.3 混合轮系
定义:由定轴轮系和周转轮系或者由两个以上的周转轮系所组成的轮系;
双排2K-H 型
定轴轮系
周转轮系
第6章 轮系
6.1 轮系的类型与应用 6.1.4 轮系的功能
第6章轮系及其设计X
轮系分类
2.从动轮转向的判断。
2
§6-2 定轴轮系的传动比
一、传动比大小的计算 一对齿轮: i12 =ω1 /ω2 =z2 /z1
可直接得出
对于齿轮系,设输入轴的角速度为ω 1,输出轴的角 速度为ω m ,中间第i 轴的角速度为ω i ,按定义有: i1m=ω1 /ωm 强调下标记法 当i1m>1时为减速, i1m<1时为增速。
Z3
15
例四:马铃薯挖掘机中:z1=z2=z3 ,求ω 2, ω 3 z1 2 H 2 H H =-1 i21 ω 2=2ω H z2 0 H 1 H 3 H 3 H H 2 z1 z 2 i31 (1) =1 ω 3=0 1 H 0 H z 2 z3 上式表明轮3的绝对角速度为0,但相对角速度不为0。
9
如果是行星轮系,则ω m、ω n中必有一个为0(不妨 设ω n=0),则上述通式改写如下:
i
H mn
m H imH 1 H
即
H imH 1 imn 1 f ( z)
两者关系如何?
以上公式中的ω i 可用转速ni 代替: 30 ni=(ω i/2 π)60 =ω i π rpm 用转速表示有:
H 2) i13
齿轮1和系杆转向相同 H 1 nH n1 nH n1 H =-3 1 nH n3 nH n3 两者转向相反。
nH 1 / 2
得: i1H = n1 / nH =-2 ,
轮1逆时针转1圈,轮 3顺时针转1圈,则系 杆顺时针转半圈。 12
自由度计算: F=3n - 2Pl +Ph
2K-H型 ω3
2
第六章轮系及其设计

H i 周转轮系 : 31
3、找出轮系之间的运动关系
1 1 3 3
例2:如图所示的轮系,已知各轮 齿数Z1=24,Z2=33,Z2„=21, Z3=78,Z3‟=18,Z4=30,Z5=78,转速 n1=1500r/min。试求转速求n5 解:(一)1,2-2„,3,H—差动轮系 3',4,5——定轴轮系 (二)
H A H H A i AB H f ( z) B B H
1. 该公式适用于齿轮A、B及行星架H三者轴线重合的机构。 2.对于差动轮系,若已知的两个构件转速相反,代入公式时, 规定一个方向为正,另一方向就代以负值,求出的第三个构 件的转向根据其符号来确定转向。 3.周转轮系的传动比正负由计算求得,不需判断。 4.f(z)由定轴轮系的方法求得,f(z)的正负号反映转化轮系 中A,B轮间转向关系。
右 手 规 则
以右手握住蜗杆,四指 指向蜗杆的转向,则拇 指的指向为啮合点处蜗 轮的线速度方向。
例1:已知各齿轮齿数: z2,z2',z3,z3', z4 求传动比i14
2
z1 ,
z 2 z3 z 4 z 2 z3 z 4 i14 (1) z1 z2 z3 z1 z2 z3
首轮1与末轮4转向相同 例2:计算传动比:
例1:图示为一大传动比的减速器, Z1=100,Z2=101,Z2'=100,Z3=99 求:输入件H对输出件1的传动比iH1
H 1 H H 2 Z3Z 2 1 i13 H (1) 3 3 H Z1Z 2
H 1
3 0
i1H Z3Z 2 99 101 1 1 1 Z1Z 2 100 100 10000
Δ 重点内容: 轮系传动比计算 难点内容: 复合轮系的传动比计算
第六章 轮系及其设计
计算步骤: 1.划分基本轮系,分别列出各基本轮系的传动比计算式; 2.根据各基本轮系间的联接关系,将各计算式联立求解。
判断周转轮系的方法: ① 先找出轴线不固定的行星轮,支持行星轮的构件就是系 杆,需要注意的是,系杆不一定呈简单的形状; ② 顺着行星轮与其它齿轮的啮合关系找到中心轮(轴线平 行),这些行星轮、中心轮和系杆便组成一个周转轮系。
i12i23i34i45
1 2
2 3
3 4
4 5
z2 z3z4 z5 z1z2 z3 z4
结 论
结论 :定轴轮系的传动比为组成该轮系的各
对啮合齿轮传动比的连乘积,其大小等于各对啮
合齿轮中所有从动轮齿数的连乘积与所有主动轮
齿数的连乘积之比,即
i1k
1 k
3、首末两轴不平行,用箭头表示
周转轮系传动比计算
周转轮系中,行星轮不是绕固定轴线转动, 因此其传动比不能直接用求解定轴轮系传动比的 方法来计算。而是采用转化机构的办法求解周转 轮系的传动比。
基本思想是:设法把周转轮系转化为定轴 轮系,然后间接地利用定轴轮系的传动比 公式求解周转轮系传动比。
转化
内啮合
i12
z2 z1
1 2
§6-2 轮系的传动比计算
1
2
圆锥齿轮 i12
z2 z1
转向用画箭头方法表示
定轴轮系传动比大小的计算
已知:各轮齿数,且齿轮1为主动轮(首轮), 齿轮5为从动轮(末轮), 则该轮系的总传动比为
i15
1 5
n1 n2
定轴轮系传动比大小的计算
从首轮1到末轮5之间各对啮合齿轮传动比的大小如下
i18
n1 n8
判断周转轮系的方法: ① 先找出轴线不固定的行星轮,支持行星轮的构件就是系 杆,需要注意的是,系杆不一定呈简单的形状; ② 顺着行星轮与其它齿轮的啮合关系找到中心轮(轴线平 行),这些行星轮、中心轮和系杆便组成一个周转轮系。
i12i23i34i45
1 2
2 3
3 4
4 5
z2 z3z4 z5 z1z2 z3 z4
结 论
结论 :定轴轮系的传动比为组成该轮系的各
对啮合齿轮传动比的连乘积,其大小等于各对啮
合齿轮中所有从动轮齿数的连乘积与所有主动轮
齿数的连乘积之比,即
i1k
1 k
3、首末两轴不平行,用箭头表示
周转轮系传动比计算
周转轮系中,行星轮不是绕固定轴线转动, 因此其传动比不能直接用求解定轴轮系传动比的 方法来计算。而是采用转化机构的办法求解周转 轮系的传动比。
基本思想是:设法把周转轮系转化为定轴 轮系,然后间接地利用定轴轮系的传动比 公式求解周转轮系传动比。
转化
内啮合
i12
z2 z1
1 2
§6-2 轮系的传动比计算
1
2
圆锥齿轮 i12
z2 z1
转向用画箭头方法表示
定轴轮系传动比大小的计算
已知:各轮齿数,且齿轮1为主动轮(首轮), 齿轮5为从动轮(末轮), 则该轮系的总传动比为
i15
1 5
n1 n2
定轴轮系传动比大小的计算
从首轮1到末轮5之间各对啮合齿轮传动比的大小如下
i18
n1 n8
《机械原理》第六章轮系及其设计
1 3
4'
5
定轴轮系的传动比
大小:
iij
i j
(1)m
从动轮齿数连乘积 主动轮齿数连乘积
转向: 画箭头法(适合任何定轴轮系)
(1)m 法(只适合所有齿轮轴线都平行的情况)
结果表示:
i1k
1 k
从动齿轮齿数连乘积
± 主动齿轮齿数连乘积
(输入、输出轴平行)
图中画箭头表示(其它情况)
结论:① 轮系传动比等于各级齿轮传动比的连乘积;
z5 z4
齿轮1为主动轮,齿轮5为从动轮
i12 i2'3 i34 i45
1 2
2 3
3 4
4 5
1 5
i15
i15
1 5
z2 z3 z4 z5 z1z2' z3' z4
i15
1 5
n1 n5
i12
1 2
z2 z1
i23
2 3
z3 z2
i34
3 4
z4 z3
i45
4 5
z5 z4
i15
1 5
i12 i 23 i 34 i45
z2z3z4z5 z1z2 z3 z4
3 2
3 4
1 4
5 齿轮1为主动轮,齿轮5为从动轮
所有从动轮齿数的连乘积 结论 定轴轮系的传动比
所有主动轮齿数的连乘积
从动轮转向的确定
1.平面定轴轮系(各齿轮轴线相互平行)
(1)法一:当轮系的主、从动 轮轴线平行时,内啮合时两者转向 相同用“”号表示;外啮合时两 者转向相反,用“”号表示。
根据基本构件不同分类
2K-H 型 3K 型 K-H - V型
单排2K-H 型
4'
5
定轴轮系的传动比
大小:
iij
i j
(1)m
从动轮齿数连乘积 主动轮齿数连乘积
转向: 画箭头法(适合任何定轴轮系)
(1)m 法(只适合所有齿轮轴线都平行的情况)
结果表示:
i1k
1 k
从动齿轮齿数连乘积
± 主动齿轮齿数连乘积
(输入、输出轴平行)
图中画箭头表示(其它情况)
结论:① 轮系传动比等于各级齿轮传动比的连乘积;
z5 z4
齿轮1为主动轮,齿轮5为从动轮
i12 i2'3 i34 i45
1 2
2 3
3 4
4 5
1 5
i15
i15
1 5
z2 z3 z4 z5 z1z2' z3' z4
i15
1 5
n1 n5
i12
1 2
z2 z1
i23
2 3
z3 z2
i34
3 4
z4 z3
i45
4 5
z5 z4
i15
1 5
i12 i 23 i 34 i45
z2z3z4z5 z1z2 z3 z4
3 2
3 4
1 4
5 齿轮1为主动轮,齿轮5为从动轮
所有从动轮齿数的连乘积 结论 定轴轮系的传动比
所有主动轮齿数的连乘积
从动轮转向的确定
1.平面定轴轮系(各齿轮轴线相互平行)
(1)法一:当轮系的主、从动 轮轴线平行时,内啮合时两者转向 相同用“”号表示;外啮合时两 者转向相反,用“”号表示。
根据基本构件不同分类
2K-H 型 3K 型 K-H - V型
单排2K-H 型
第六章 轮系及其设计

H 13
n1 nH 14.7 r/ min i1 H
系杆H与齿轮1转向相同
§6-4 复合轮系的传动比
一、 复合轮系传动比的计算方法 (1)正确区分各基本轮系; (2)列出计算各基本轮系传动比的方程式; (3)确定各基本轮系的联系; (4)将各基本轮系传动比方程式联立求解。
区分基本周转轮系的思路
2
1
1 3
3' 4'
4 (avi)
5
5
i15
1 n1 5 n5
一、平面定轴轮系传动比的计算
轮系中各对啮合齿轮的传动比为: z2 1 i12 = 2 = - z1
2 3' 4'
1 z3 2 i23 = 1 3 = z2 3 z4 3 i34 = 4 = - z3 z5 4 i45 = = - z 且:3 = 3 ,4 = 4 5 4
1 H
1
差 动 轮 系
2 H 0 0
3
2H
2
3H
1 H
1 3 转化轮系
1H
转 化 轮 系
H
2 H
0 1 3 0 3
2
2
H
3
给整个周转轮系加一个与行星架H的角速 度大小相等、方向相反的公共角速度-H
构件名称 原周转轮系中 的角速度 转化轮系中各 构件的角速度
1 H
1
行星架H 中心轮1 行星轮2
行星轮——几何轴线有公转运动的齿轮
系杆H(行星架)——支撑行星轮的构件
行星轮 系杆
中心轮
在一个周转轮系中,中心轮 的轴线必须和系杆的轴线重 合。即同心条件。
中心轮
二、周转轮系传动比的计算
H
2 H
n1 nH 14.7 r/ min i1 H
系杆H与齿轮1转向相同
§6-4 复合轮系的传动比
一、 复合轮系传动比的计算方法 (1)正确区分各基本轮系; (2)列出计算各基本轮系传动比的方程式; (3)确定各基本轮系的联系; (4)将各基本轮系传动比方程式联立求解。
区分基本周转轮系的思路
2
1
1 3
3' 4'
4 (avi)
5
5
i15
1 n1 5 n5
一、平面定轴轮系传动比的计算
轮系中各对啮合齿轮的传动比为: z2 1 i12 = 2 = - z1
2 3' 4'
1 z3 2 i23 = 1 3 = z2 3 z4 3 i34 = 4 = - z3 z5 4 i45 = = - z 且:3 = 3 ,4 = 4 5 4
1 H
1
差 动 轮 系
2 H 0 0
3
2H
2
3H
1 H
1 3 转化轮系
1H
转 化 轮 系
H
2 H
0 1 3 0 3
2
2
H
3
给整个周转轮系加一个与行星架H的角速 度大小相等、方向相反的公共角速度-H
构件名称 原周转轮系中 的角速度 转化轮系中各 构件的角速度
1 H
1
行星架H 中心轮1 行星轮2
行星轮——几何轴线有公转运动的齿轮
系杆H(行星架)——支撑行星轮的构件
行星轮 系杆
中心轮
在一个周转轮系中,中心轮 的轴线必须和系杆的轴线重 合。即同心条件。
中心轮
二、周转轮系传动比的计算
H
2 H
第六章轮系及其设计
三种:
(A)2K—H 型:其基本构件为两个中心轮和一个行星架,如图 6-7(a)、(b)所示。
(B)3K 型:其基本构件为三个中心轮,如图 6-17 所示。
(C)K—H—V 型:其基本构件为一个中心轮和一个行星架,一个输出构件。如渐开线
少齿差行星减速器。
(2)按自由度分类
F=1,为行星轮系,只需给定一个构件的运动,如图 6-7a。
当轮系中有圆锥齿轮、蜗轮蜗杆及螺旋齿轮传动时,称为空间齿轮传动。 空间齿轮的传动比的大小:iAB=ω A/ω B=主动轮齿数连乘积/从动轮齿数连乘积。 方向:因为各轮轴线不一定平行,所以只能用画箭头的方法来确定。 如图 6-3b。
(a)
(b)
图 6-3
三、定轴轮系的应用
1.得到一大的传动比。例三对蜗轮蜗杆传动,蜗杆主动,蜗轮从动,三个蜗杆均为
z3 z2 z1 z 2i1H 1 i1H31
z3 z2 z1 z 2
iH1
1 1 i1H3
1 1 z3z2
10000
z1 z 2
图 6-8 三、周转轮系的应用
1.行星轮系:(1)实现大传动比的减速传动。(2)结构紧凑,可用在大功率传动的 场合。(因为可用均匀分布的几个相同的行星轮来共同传力)。(3)可满足某些特殊的需要 (因为行星轮上各点的运动轨迹是许多形状和性质不同的摆线)。(4)可得到多种用途(因 为行星轮既自转又公转)。
现计算该转化轮系的传动比。根据计算定轴轮系传动比的方法可知:
H
H
H
i13=ω 1/ω 3=(ω 1-ω H)/( ω 3-ω H)=-Z2Z3/Z1Z2=-Z3/Z1
因为齿数 Z1、Z2、Z3 是已知的,所以,当ω 1、ω 2、ω 3 中已知两个,就可求出
第六章轮系及其设计
(a)上海海运大学专用(b) 3K型: 基本构件为 个中心轮。 型 基本构件为3个中心轮 个中心轮。 (c)K-H-V型:基本构件为1个中 型 基本构件为 个中 心轮、 个系杆和 个系杆和1 心轮、1个系杆和 个输出构件。 个输出构件。
(c)
上海海运大学专用
(2) 按自由度分: 按自由度分:
3 O1 O3 1 2 O2 H 4 OH
3 2 O2 H O1 1 3 O1 OH O3 1 2 O2 H
加 -ωH
z3 z2 z3 ω1H ω1 −ωH H i13 = H = =− =− z2 z1 z1 ω3 ω3 −ωH
H i1k
上海海运大学专用
H ω1 ω1 − ωH 1至k间所有从动轮齿数的乘 积 = H = =± 1至k间所有主动轮齿数的乘 积 ωk − ωH ωk
n1 − nH 2 z2 z3 i = = (−1) ,又 3 = 0 n n3 − nH z′ z1 2
H 13
n1 −nH 101×99 ∴ = , − nH 100×100 ∴i1H
101×99 − i1H +1 = 10000
1 = →iH1 = 10000 10000
行星轮系可以 用少数轮齿得到很 大的传动比, 大的传动比 , 可用 于测量高转速或作 为微调机构。 为微调机构。
O1 1 2 O2 H OH
3
(a) 差动轮系 两个太阳轮都转动
(b) 行星轮系 其中一个太阳轮固定
F = 3×4 − 2×4 − 2 = 2
上海海运大学专用
F = 3× 3 − 2× 3 − 2 = 1
二、周转轮系的传动比计算 1、转化机构 、 周转轮系和定轴轮系的根本区别: 周转轮系和定轴轮系的根本区别: 周转轮系中存在几何轴线运动的行星轮! 周转轮系中存在几何轴线运动的行星轮! 但“动轴”和“定轴” 在一定的条件下可以转化。 动轴” 定轴” 在一定的条件下可以转化。 如以系杆H为动参考系,所观察到的原周转轮系变为定轴轮系 如以系杆 为动参考系, 为动参考系 ——称为转化机构。 称为转化机构 ——称为转化机构。 转化方法: 转化方法:给整个周转轮系加上一个绕中心轮转动的 反转法。 公共角速度 -ωH 。 —— 反转法。
机械设计第6章轮系

教学要求、重点与难点
一、教学要求
了解轮系的类型和应用;掌握定轴轮系 的传动比计算;了解周转轮系、复合轮系
传动比计算方法。
二、教学重点与难点
重点:定轴轮系的传动比计算。 难点:周转轮系及其传动比计算。
返回章目录
6.1 轮系的分类
在现代机械中,为了满足不同的工作要求,仅用一 对齿轮传动或蜗杆传动往往是不够的,通常需要采用 一系列相互啮合的齿轮(包括蜗杆传动)组成的传动 系统将主动轴的运动传给从动轴。这种由一系列齿轮 组成的传动系统成为轮系。
如果轮系中各齿轮的轴线在同一个平面内,则 称为平面轮系,否则称为空间轮系。
根据轮系运转时齿轮的轴线位置相对于机架是否 固定,又可将轮系分为两大类:定轴轮系和周转轮 系。
各种轮系
返回章目录
6.2 定轴轮系传动比的计算
如果轮系运转时所有齿轮的轴线保持固定,称为定轴轮系,定轴轮系又 分为平面定轴轮系和空间定轴轮系两种。
试求:(1)转动比i15, (2)当n1=1440r/min,转向如图时,求n5。
解: (1)求传动比i15 由式(5-1)可得:
i15
1 5
n1 n5
z2 z3z4z5 z1z2 z3z4
= 60 72 25 20 72 230 20 25
由于此轮系数为空间定轴轮系,故只能用画箭头 的方法确定输出轴的转向,如图所示。
12' 3' 4 (1)3 z2 z3 z4 z5
12 2'3 3'4 45
234 5பைடு நூலகம்
z1
z
' 2
z3'
z
4
推广后的平面定轴轮系传动比公式为:
iAK
(1)m
一、教学要求
了解轮系的类型和应用;掌握定轴轮系 的传动比计算;了解周转轮系、复合轮系
传动比计算方法。
二、教学重点与难点
重点:定轴轮系的传动比计算。 难点:周转轮系及其传动比计算。
返回章目录
6.1 轮系的分类
在现代机械中,为了满足不同的工作要求,仅用一 对齿轮传动或蜗杆传动往往是不够的,通常需要采用 一系列相互啮合的齿轮(包括蜗杆传动)组成的传动 系统将主动轴的运动传给从动轴。这种由一系列齿轮 组成的传动系统成为轮系。
如果轮系中各齿轮的轴线在同一个平面内,则 称为平面轮系,否则称为空间轮系。
根据轮系运转时齿轮的轴线位置相对于机架是否 固定,又可将轮系分为两大类:定轴轮系和周转轮 系。
各种轮系
返回章目录
6.2 定轴轮系传动比的计算
如果轮系运转时所有齿轮的轴线保持固定,称为定轴轮系,定轴轮系又 分为平面定轴轮系和空间定轴轮系两种。
试求:(1)转动比i15, (2)当n1=1440r/min,转向如图时,求n5。
解: (1)求传动比i15 由式(5-1)可得:
i15
1 5
n1 n5
z2 z3z4z5 z1z2 z3z4
= 60 72 25 20 72 230 20 25
由于此轮系数为空间定轴轮系,故只能用画箭头 的方法确定输出轴的转向,如图所示。
12' 3' 4 (1)3 z2 z3 z4 z5
12 2'3 3'4 45
234 5பைடு நூலகம்
z1
z
' 2
z3'
z
4
推广后的平面定轴轮系传动比公式为:
iAK
(1)m
第六章轮系及其设计

第六章 轮系及其设计6-2 在图示的手摇提升装置中,已知各轮齿数为:z 1=20,z 2=50,z 3=15,z 4=30,z 6=40,z 7=18,z 8=51,蜗杆z 5=1,且为右旋,试求传动比i 18;并指出提升重物时手柄的转向。
答案:所示轮系为定轴轮系;各轮转向为:8-逆时针、7-顺时针、4-箭头向左、3-箭头向上、2-箭头向上、1-箭头向上;传动比:67.56618 i6-3 在图示的蜗杆传动中,试分别在左右两图上标出蜗杆1的旋向和转向。
答案: 左图为右旋蜗杆;右图蜗杆逆时针转动6-5 在图示的轮系中,已知z 1=20,z 2=30,z 3=18,z 6=48,齿轮1的转速n 1=150 r/min ,试求系杆 H 的转速n H 的大小和方向。
答案:667.534124114-=⨯-=--=Z Z Z Z i H H H ωωωω因为:04=ω所以:667.511+=Hωωm in /5.22r H =ω6-8 在图示的双级行星齿轮减速器中,各齿轮的齿数为z 1=z 6=20,z 3=z 4=40,z 2=z 5=10,试求:1)固定齿轮4时的传动比i 1H2;2)固定齿轮3时的传动比i 1H2。
答案:1) 2111262224246=-=--=H H H H i i ωωωω32621==H H i i2)21311113-=--=H H H i ωωωω31111==H H i ωω22426264-=--=H H H i ωωωω16ωω= 314ωω=5921=H i。
第六章 轮系及其设计1

H 1 H 3
1 H 3 H
输入轴
输出轴
z3 1 H 3 H z1
构件名称 系杆H 中心轮1 中心轮3
原周转轮系中 各构件的角速度
转化机构中各 构件的角速度
H H H H 0 1H 1 H
H 1
3
3H 3 H
2) 行星轮系 具有一个自由度
二、周转轮系的传动比 周转轮系传动比的计算方法(转化机构法)
周转轮系
反转法
定轴轮系 (转化机构)
定轴轮系传动 比计算公式
求解周转轮系 的传动比
周转轮系
ωH
给整个周转轮系加一个与系杆H的角速度 大小相等、方向相反的公共角速度ωH
构件名称 系杆H 中心轮1 行星轮2 中心轮3 原周转轮系中 各构件的角速度 转化机构中各 构件的角速度
2)分列方程
n1 z 2 H n2 ' n H z3 z 4 1 i2' 4 , n2 z1 n4 n H z 2' z 3 2
3)联立求解:
3
H
2'
4
2' 4
OH
z1 n2 n1 z2
, n4 0 n2 n2
i1H
n1 z4 z2 14 ( 1) nH z2 z1 9
H
2
1 H 解:i 1 i1H 3 H
H 13
1 3
z3 80 2 z1 40
i1H
z3 1 i 1 3 z1
H 13
例6-2
z1 100 z2 101 z2 100 z3 99
求 iH 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
周转轮系
:
iH
31
3 H 1 H
(1)Z1 Z3
3、找出轮系之间的运动关系
1 3
1 3
3'
2
2' 4
13
H
输出
1'
4、Hale Waihona Puke 立求解:i1H1 H
Z1
Z 3 Z1
1 Z1Z2Z3
Z2Z3
例2:
(H,5为一整体) H
电动卷扬机减速器 Z1=24,Z2=48,Z2'=30, Z3=90,Z3'=20,Z4=30, Z5=80,求i1H
④实现多分路传动 机械式钟表机构就是一例
⑤实现运动的合成与分解
利用差动轮系的双自由度特点, 可把两个运动合成为一个运动。 图示的差动轮系就常被用来进 行运动的合成。
差动轮系不仅能将两个独立地运动合成为一个运动,而且还可将 一个基本构件的主动转动,按所需比例分解成另两个基本构件的 不同运动。汽车后桥的差速器就利用了差动轮系的这一特性。
六章节轮系及其设计
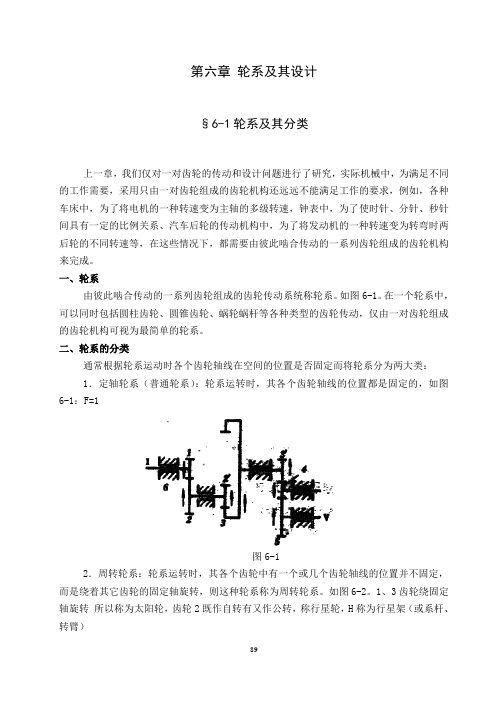
§6—1 轮系及其分类 轮系:用一系列互相啮合的齿轮将主动轴和从动轴连接起来, 这种多齿轮的传动装置称为轮系。
定轴轮系(普通轮系)
轮系
周转轮系 复合轮系
定+周 周+周
1
3
2
H
OH
2'
4
四、圆锥齿轮组成的周转轮系
i1H3W W 1 3 W W H H(1)2Z Z1 2Z Z2 3
(3) 找出各基本轮系之间的联系。
(4) 将各基本轮系传动比方程式联立求解,即可求得混 合轮系的传动比。
例1:已知各轮齿数, 求传动比i1H
1、分析轮系的组成 1,2,2',3——定轴轮系 输 入
1',4,3',H——周转轮系
2、分别写出各轮系的传动比
定轴轮系 :
i13 13
(1)2
Z2Z3 Z1Z2
结束语
谢谢大家聆听!!!
16
O
2
3 H
O
1
i1H2
W1 W2
WH WH
(作矢量作)
§6—4 复合轮系传动比的计算
在计算混合轮系传动比时,既不能将整个轮系作为定轴轮系 来处理,也不能对整个机构采用转化机构的办法。 计算混合轮系传动比的正确方法是: (1) 首先将各个基本轮系正确地区分开来 (2) 分别列出计算各基本轮系传动比的方程式。
二、轮系的应用
①实现大传动比传动
i
1 5
(1)m
所有从动轮齿数的乘积 所有主动轮齿数的乘积
②实现变速、换向传动
③实现结构紧凑的大功率传动
在周转轮系中,多采用多个 行星轮的结构形式,各行星 轮均匀地分布在中心轮四周, 如图所示。
这样,载荷由多对齿轮承受,可大大提高承载能力;又因多个 行星轮均匀分布,可大大改善受力状况此外,采用内啮合又有 效地利用了空间,加之其输入轴与输出轴共线,可减小径向尺 寸。因此可在结构紧凑的条件下,实现大功率传动。
(一)1,2-2',3,H——周转轮系
35
2
2' 4
1
3'
H为输出件
3',4,5——定轴轮系
(二)
i1H3 1 3 H H
(1)Z2Z3 Z1Z2
i35
3 5
Z5 Z3
(三)
3 H
3 5
(四)联立 i1H 31
n1145r/0min
nHin1H 1
145046.77r/min 31