西工大机械原理第八版答案3-11
西工大机械原理第八版答案
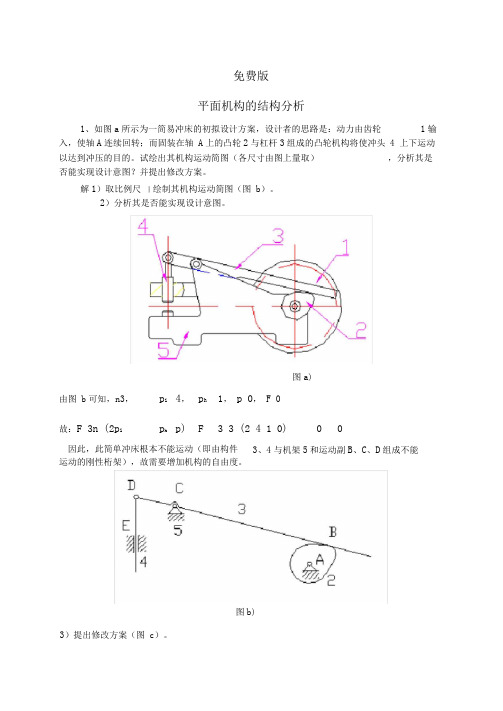
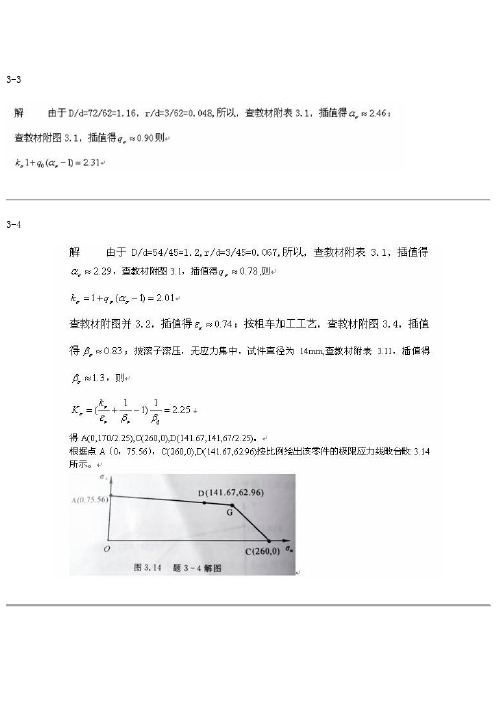
免费版 平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴 A 上的凸轮2与杠杆3组成的凸轮机构将使冲头 4 上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取) ,分析其是否能实现设计意图?并提出修改方案。
解1)取比例尺 丨绘制其机构运动简图(图 b )。
2)分析其是否能实现设计意图。
图a )由图 b 可知,n3, p i 4, p h 1, p 0, F 0 故:F 3n (2p lp h p) F 3 3 (2 4 1 0)0 0因此,此简单冲床根本不能运动(即由构件 3、4与机架5和运动副B 、C 、D 组成不能3)提出修改方案(图 c )。
运动的刚性桁架),故需要增加机构的自由度。
图b)cDCC%EE图 图 clc2)2C4F P i ED C3 252 51 B1图a )图b )多4P h 03n 2 p i P h 解:n 33n 2p i P h 12、试画出图示平面机构的运动简图,并计算其自由度。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增 加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图 给出了其中两种方案)。
解:n 4, p i 5,P h 1,F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
EP h 1 , C、E复合铰链。
解3-1: n 7, p i 10 , P h 0, F 3n 2 p l解3-2: n 8 , p l 11 , p h 1 , F 3n 2 P i P h 1,局部自由度43-2解 3-3: n 9, p l 12 , p h 2, F 3n 2p ] p h 1解:n 10, p l 15, p h 0解:n 11 , P i 17 , P h 0N4、试计算图示精压机的自由度p 2P iP h3n 2 5 0 3 3 1 p 2P i P h 3n 2 10 3 6 2FFF 3n (2p i P h p) F F 3n (2p i P h P ) F310(2 15 0 1) 0 1 311(2 17 0 2) 0 1(其中E、D及H均为复合铰链)(其中c、F、K均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
西工大教材-机械原理各章习题及答案
电动机所需的功率为
p = ρ • v /η = 5500 ×1.2 ×10−3 / 0.822 = 8.029(KW )
5-8 在图示斜面机构中,设已知摩擦面间的摩擦系数 f=0.2。求在 G 力作用下(反行程),此斜面 机构的临界自锁条件和在此条件下正行程(在 F 力作用下)的效率。 解 1)反行程的自锁条件 在外行程(图 a),根据滑块的平衡条件:
解 1 ) 取 比 例 尺 μ 1 = 1mm/mm 绘 制 机 构 运 动 简 图 ( 图 b )
(a)
2 )计算该机构的自由度
n=7
pι=9
ph=2(算齿轮副,因为凸轮与齿轮为一体) p’=
F’= F=3n-2pe-ph
=3x7-2x8-2 =1
G7
D 64 C
EF
3
9
B
2
8
A
ω1
b)
2-6 试计算如图所示各机构的自由度。图 a、d 为齿轮一连杆组合机构;图 b 为凸轮一连杆组合 机构(图中在 D 处为铰连在一起的两个滑块);图 c 为一精压机机构。并问在图 d 所示机构中, 齿轮 3 与 5 和齿条 7 与齿轮 5 的啮合高副所提供的约束数目是否相同?为什么?
C3 重合点继续求解。
解 1)速度分析(图 b)取重合点 B2 与 B3,有
方向 大小 ?
v vv vB3 = vB2 + vB3B2 ⊥ BD ⊥ AB // CD ω1lAB ?
D
C
3 d3
ω3
4
ω3 90°
2
B(B1、B2、B3)
ω1
A1 ϕ = 90°
西工大版机械设计答案(第八版)_王
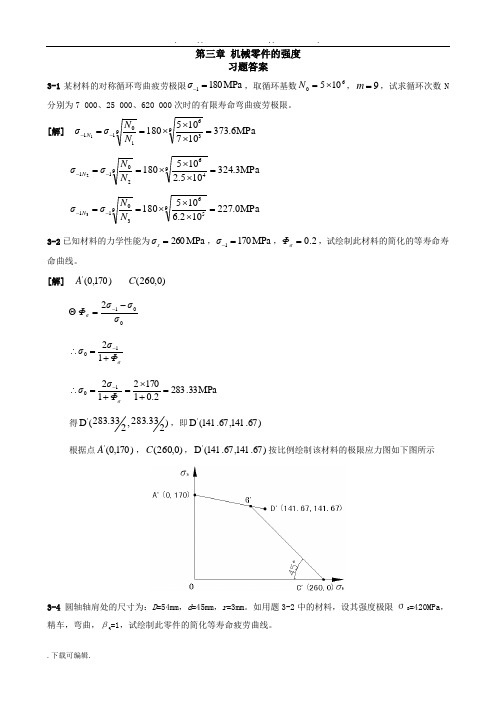
第三章 机械零件的强度习题答案3-1某材料的对称循环弯曲疲劳极限MPa 1801=-σ,取循环基数60105⨯=N ,9=m ,试求循环次数N分别为7 000、25 000、620 000次时的有限寿命弯曲疲劳极限。
[解] MPa 6.373107105180936910111=⨯⨯⨯==--N N σσN MPa 3.324105.2105180946920112=⨯⨯⨯==--N N σσN MPa 0.227102.6105180956930113=⨯⨯⨯==--N N σσN 3-2已知材料的力学性能为MPa 260=s σ,MPa 1701=-σ,2.0=σΦ,试绘制此材料的简化的等寿命寿命曲线。
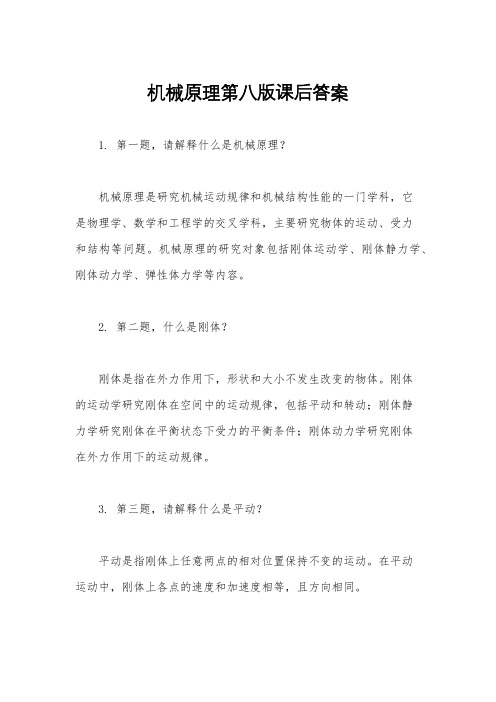
[解] )170,0('A )0,260(C 012σσσΦσ-=-Θ σΦσσ+=∴-121MPa 33.2832.0117021210=+⨯=+=∴-σΦσσ得)233.283,233.283(D ',即)67.141,67.141(D '根据点)170,0('A ,)0,260(C ,)67.141,67.141(D '按比例绘制该材料的极限应力图如下图所示3-4 圆轴轴肩处的尺寸为:D =54mm ,d =45mm ,r =3mm 。
如用题3-2中的材料,设其强度极限σB =420MPa ,精车,弯曲,βq =1,试绘制此零件的简化等寿命疲劳曲线。
[解] 因2.14554==d D ,067.0453==d r ,查附表3-2,插值得88.1=ασ,查附图3-1得78.0≈σq ,将所查值代入公式,即()()69.1188.178.0111k =-⨯+=-α+=σσσq查附图3-2,得75.0=σε;按精车加工工艺,查附图3-4,得91.0=σβ,已知1=q β,则35.211191.0175.069.1111k =⨯⎪⎭⎫ ⎝⎛-+=⎪⎪⎭⎫ ⎝⎛-+=qσσσσββεK ()()()35.267.141,67.141,0,260,35.2170,0D C A ∴ 根据()()()29.60,67.141,0,260,34.72,0D C A 按比例绘出该零件的极限应力线图如下图3-5 如题3-4中危险截面上的平均应力MPa 20m =σ,应力幅MPa 20a =σ,试分别按①C r =②C σ=m ,求出该截面的计算安全系数ca S 。
西北工业大学机械原理课后答案第3章
第3章课后习题参考答案3—1何谓速度瞬心相对瞬心与绝对瞬心有何异同点答:参考教材30^31页。
3—2何谓三心定理何种情况下的瞬心需用三心定理来确定答:参考教材31页。
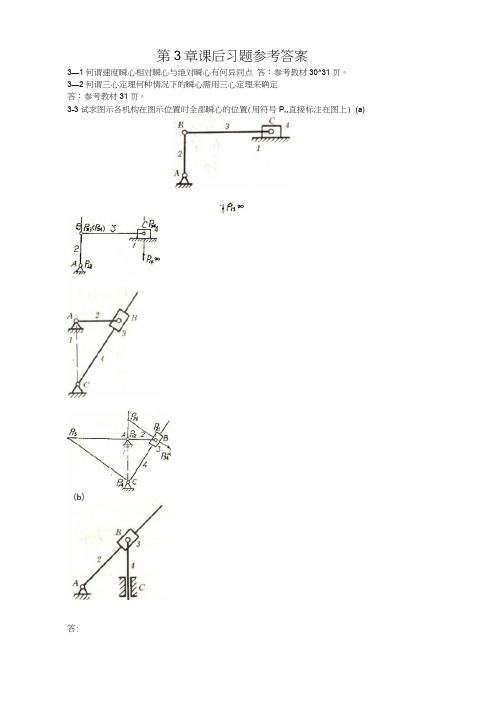
3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上) (a)答:3-4标出图示的齿轮一连杆纽合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比U)l/U)3o答:1)瞬新的数目:K 二N (N-1 )/2=6 (6T )/2=152)为求3(/33需求3个瞬心%、P%、P 竹的位置由构件J 3在K 点的速度方向相同,可知4与3同向。
3-6 在图示的四杆机构中,L AB 二60mm, LcD=90mm, L AD =L BC = 120mm, u)2=10rad/s,试用瞬心法求:1) 当 0=165°2) 当 0=165°2)求vc 定出瞬心"2的位置(图b) 因M 为构件3的绝对瞬心,则有 U )3=VB /IB PI 3=W2I JB / U=10X X78=(rad/s) v c = u c pi3U)a=X52X = (m/s)(2分)时,点的速度vc;吋,构件3的BC 线上速度最小的一点E 的位置及速度的大小:3i/3s= PadPu/PidPi^DK/AK(图b)C线上速度灵小的点必与p13点的距离3—11速度多边形和加速度多边彤有哪些特性试标出图中的方向。
答速度多边形和加速慶多边形特性参见下图,各速度方向在图中用箭头标出。
3T2在图示的机构中,设已知构件的尺寸及原动件1的角速度(顺时针),试用图解法求机构在图示位置吋C点的速厦和加速度。
V C3=V B+V C3B=V C2+V C3C2(2 分)aC3=aB+a n C3B+a C38=aC2+a C3C2+a”C3C2Vc2=0 3C2=0 (2 分)Vc30=O U) 3=0 a k C3C2=0(1分)(1分)答:(3分)答:(2分)V C2=V B+V C28=V O3+V G2C3U)3=W 2=0(2分)(2分)(1分)& f t k ra^+a C2B+3 C2B~3C3+3 C2C3+3 C2C3(3分)(c)(bj s bi iV B3=V B2B3B2(2分)(1分) a 阴+a B3_aB2+a B3B2+a B3B2 3- 13试判斷在图示的两机构中.B 点足否都存在哥氏加速度又在何位置哥氏加速度为零忤 出相应的机构位置图。
机械原理第八版课后答案
机械原理第八版课后答案1. 第一题,请解释什么是机械原理?机械原理是研究机械运动规律和机械结构性能的一门学科,它是物理学、数学和工程学的交叉学科,主要研究物体的运动、受力和结构等问题。
机械原理的研究对象包括刚体运动学、刚体静力学、刚体动力学、弹性体力学等内容。
2. 第二题,什么是刚体?刚体是指在外力作用下,形状和大小不发生改变的物体。
刚体的运动学研究刚体在空间中的运动规律,包括平动和转动;刚体静力学研究刚体在平衡状态下受力的平衡条件;刚体动力学研究刚体在外力作用下的运动规律。
3. 第三题,请解释什么是平动?平动是指刚体上任意两点的相对位置保持不变的运动。
在平动运动中,刚体上各点的速度和加速度相等,且方向相同。
4. 第四题,请解释什么是转动?转动是指刚体绕某一固定轴线旋转的运动。
在转动运动中,刚体上各点的速度和加速度不相等,且方向不同。
5. 第五题,请解释什么是力矩?力矩是力对物体产生转动效果的物理量,它等于力的大小乘以力臂的长度。
力矩的方向由右手螺旋定则确定,即力矩的方向与力和力臂的方向构成右手螺旋。
6. 第六题,请解释什么是动量矩?动量矩是刚体上各点的动量对某一轴线产生的转动效果的物理量,它等于动量的大小乘以力臂的长度。
动量矩的方向由右手螺旋定则确定,即动量矩的方向与动量和力臂的方向构成右手螺旋。
7. 第七题,请解释什么是惯性矩?惯性矩是刚体对旋转运动的惯性大小的物理量,它等于物体质量乘以平行轴定理中的距离平方。
惯性矩的大小与物体的形状和质量分布有关。
8. 第八题,请解释什么是牛顿定律?牛顿定律是经典力学的基本定律,包括牛顿第一定律、牛顿第二定律和牛顿第三定律。
牛顿第一定律指出,物体要么静止,要么匀速直线运动,除非受到外力的作用。
牛顿第二定律指出,物体的加速度与作用在物体上的合外力成正比,与物体的质量成反比,方向与合外力方向相同。
牛顿第三定律指出,任何两个物体之间的相互作用力大小相等,方向相反。
机械设计(第八版)课后答案西北工业大学
得蜗轮的基本许用接触应力
。蜗杆传动的工作寿命 Lh=16800h,蜗轮轮齿的应力循环次数
寿命系数为 蜗轮齿面的许用接触应力为
4、计算中心距
取中心距 a=200mm,因 i=23,故从教材表 11-2 中取模数 m=8mm,蜗杆分度圆直径 d1=80mm,这时 d1/a=0.4,与假设 值相符,因此以上计算结果可用。 (2)蜗杆与蜗轮的主要参数和几何尺寸:
比较
和
由公式
得
(5)由接触强度 确定的最大转矩。由公式
得 (6)齿轮行动的功率。由弯曲强度和接触强度计算的转矩可知,此齿轮传动所能 传递的最大转矩为 T1=1827280N.mm
10-8 解(1)选择齿轮的材料和精度等级。根据教材表 10-1 选大小齿轮材料均为 20CrMnTi,渗碳淬火。小齿轮齿面硬度取 62HRC,大齿轮齿面硬度取 58HRC,世部 达 300HBS. 选精度等级为 6 级。 (2)按齿根弯曲疲劳强度设计。 1、小齿轮传递的转矩:
8、由接触强度计算小齿轮的分度圆直径
9、验算载荷系数: 齿轮的使用系数:载荷 状况以轻微冲击为依据查教材表 10-2 得 KA=1.25 齿轮的圆周速度
由教材图 10-8 查得:Kv=1.12 对于软齿面齿轮,假设
,由教材表 10-3 查得
齿宽 齿宽与齿高比
由教材表 10-4 查得 系数:
10、校正直径:
取安全系数 SF=1.5 由教材图 10-20(d)得
按对称循环变应力确定许用弯曲为
9、由弯曲强度计算齿轮的模数。因 数代入设计公式中得
取标准值
.
10、验算载荷系数:
小齿轮的分度圆直径
齿轮的圆周速度
由教材图 10-8 查得:
(完整版)机械原理第八版课后练习答案(西工大版)

<机械原理>第八版西工大教研室编第2章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-4 何谓最小阻力定律?试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别?答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。
1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。
2-10 请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副?试画出仿腿部机构的机构运动简图,并计算其自由度。
2-11图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
机械原理第八版答案与解析
机械原理第八版 西北工业大学平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l0='F 0='FF p p p n F h l '-'-+-=)2(3 F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯= 10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
《机械原理》第八版课后习题答案
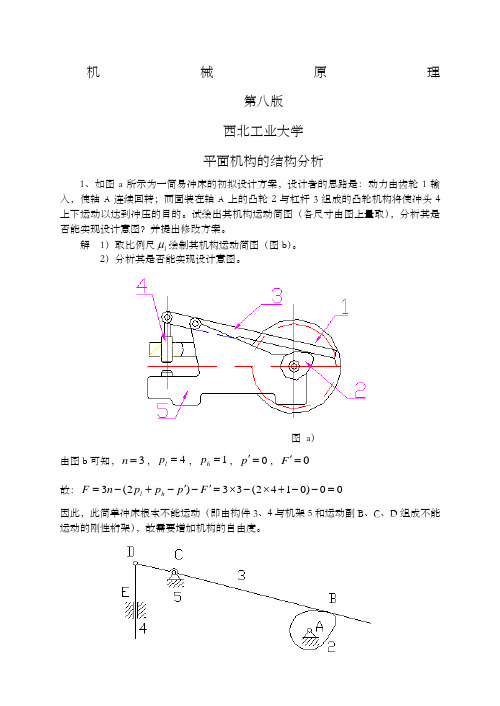
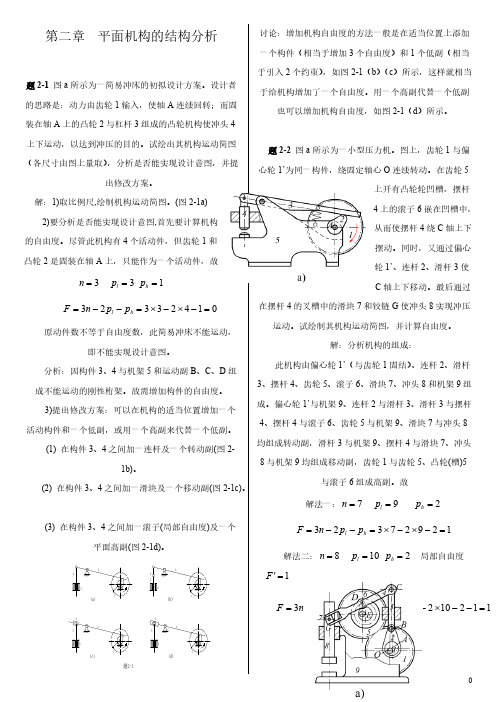
第2章 机构的结构分析(P29)2-12:图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:分析机构的组成:此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5与机架9、滑块7与冲头8均组成转动副,滑杆3与机架9、摆杆4与滑块7、冲头8与机架9均组成移动副,齿轮1与齿轮5、凸轮(槽)5与滚子6组成高副。
故解法一:7=n 9=l p 2=h p12927323=-⨯-⨯=--=h l p p n F解法二:8=n 10=l p 2=h p 局部自由度1='F11210283)2(3=--⨯-⨯='-'-+-=F p p p n F h l(P30) 2-17:试计算如图所示各机构的自由度。
图a 、d 为齿轮-连杆组合机构;图b 为凸轮-连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图d 所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?解: a) 4=n 5=l p 1=h p11524323=-⨯-⨯=--=h l p p n Fb) 5=n 6=l p 2=h p12625323=-⨯-⨯=--=h l p p n F12625323=-⨯-⨯=--=h l p p n Fc) 5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n Fd) 6=n 7=l p 3=h p13726323=-⨯-⨯=--=h l p p n F(C 可看做是转块和导块,有1个移动副和1个转动副)齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1个约束。
西工大机械原理第八版答案(版)

.免费版平面机构的结构分析1、如图 a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l绘制其机构运动简图(图 b)。
2)分析其是否能实现设计意图。
图 a)由图 b 可知,n 3 ,p l 4 , p h1, p 0 ,F0故: F 3n (2 p l p h p ) F 3 3 (2 4 1 0) 00因此,此简单冲床根本不能运动(即由构件3、4 与机架 5 和运动副B、C、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b).为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图 c 给出了其中两种方案)。
图 c1)图c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图 a)解: n 3 ,p l 4 , p h0 , F 3n 2 p l p h1图 b)解: n 4 ,p l 5 , p h1, F 3n 2 p l p h13、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆3- 1解 3- 1:n7 ,p l10 , p h0 , F 3n 2 p l p h 1 ,C、E复合铰链。
3- 2解 3- 2:n8 ,p l11 , p h1, F3n 2 p l p h 1,局部自由度3- 3解 3- 3:n9 ,p l12 , p h 2 , F 3n 2 p l p h14、试计算图示精压机的自由度n 10 p15 p0n11 p17 p. p 2 p l p h 3n 2 5 0 3 3 1p2p l p h 3n 2 10 3 62 F 0F0F 3n ( 2p l p h p ) F F 3n (2 p l p h p )F3 10 (215 0 1) 0 1311 (217 0 2) 01(其中 E、 D 及 H 均为复合铰链)(其中C、F、K均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
机械设计(第八版)课后习题答案(最新,参考答案)
3到13章答案 免费下载 0财富值西北工业大学机械原理及机械零件教研室 编著第三章 机械零件的强度习题答案3-1某材料的对称循环弯曲疲劳极限MPa 1801=-ζ,取循环基数60105⨯=N ,9=m ,试求循环次数N 分别为7 000、25 000、620 000次时的有限寿命弯曲疲劳极限。
[解] MPa 6.373107105180936910111=⨯⨯⨯==--N N ζζNM P a 3.324105.2105180946920112=⨯⨯⨯==--N N ζζNM P a 0.227102.6105180956930113=⨯⨯⨯==--N N ζζN3-2已知材料的力学性能为MPa 260=s ζ,MPa 1701=-ζ,2.0=ζΦ,试绘制此材料的简化的等寿命寿命曲线。
[解] )170,0('A )0,260(C 0012ζζζΦζ-=-ζΦζζ+=∴-1210M P a 33.2832.0117021210=+⨯=+=∴-ζΦζζ得)233.283,233.283(D ',即)67.141,67.141(D '根据点)170,0('A ,)0,260(C ,)67.141,67.141(D '按比例绘制该材料的极限应力图如下图所示3-4 圆轴轴肩处的尺寸为:D =72mm ,d =62mm ,r =3mm 。
如用题3-2中的材料,设其强度极限σB =420MPa ,精车,弯曲,βq =1,试绘制此零件的简化等寿命疲劳曲线。
[解] 因2.14554==d D ,067.0453==d r ,查附表3-2,插值得88.1=αζ,查附图3-1得78.0≈ζq ,将所查值代入公式,即()()69.1188.178.0111k =-⨯+=-α+=ζζζq查附图3-2,得75.0=ζε;按精车加工工艺,查附图3-4,得91.0=ζβ,已知1=q β,则 35.211191.0175.069.1111k =⨯⎪⎭⎫ ⎝⎛-+=⎪⎪⎭⎫ ⎝⎛-+=q ζζζζββεK ()()()35.267.141,67.141,0,260,35.2170,0D C A ∴根据()()()29.60,67.141,0,260,34.72,0D C A 按比例绘出该零件的极限应力线图如下图3-5 如题3-4中危险截面上的平均应力MPa 20m =ζ,应力幅MPa 20a =ζ,试分别按①C r =②C ζ=m ,求出该截面的计算安全系数ca S 。
机械原理(西工大)最全课后习题答案
2) n 7 pl 10 ph 0 F 3n 2 pl ph 3 7 2 10 0 1
题2-4
题 2-5 图 a 所示是为高位截肢的 人所设计的一种假肢膝关节机构, 该机构能保持人行走的稳定性。
若以颈骨 1 为机架, 试绘制其机构运动简图和计算其 自由度,并作出大腿弯曲 90 度时
F 3n (2 pl ph p) F 3 7 (2 8 2 0) 2 1
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根通保1据护过生高管产中线工资敷艺料设高试技中卷术资0配料不置试仅技卷可术要以是求解指,决机对吊组电顶在气层进设配行备置继进不电行规保空范护载高高与中中带资资负料料荷试试下卷卷高问总中题体2资2配料,置试而时卷且,调可需控保要试障在验各最;类大对管限设路度备习内进题来行到确调位保整。机使在组其管高在路中正敷资常设料工过试况程卷下中安与,全过要,度加并工强且作看尽下护可都关能可于地以管缩正路小常高故工中障作资高;料中对试资于卷料继连试电接卷保管破护口坏进处范行理围整高,核中或对资者定料对值试某,卷些审弯异核扁常与度高校固中对定资图盒料纸位试,置卷.编工保写况护复进层杂行防设自腐备动跨与处接装理地置,线高尤弯中其曲资要半料避径试免标卷错高调误等试高,方中要案资求,料技编试5术写卷、交重保电底要护气。设装设管备置备4线高动调、敷中作试电设资,高气技料并中课术3试且资件中、卷拒料中包管试绝试调含路验动卷试线敷方作技槽设案,术、技以来管术及避架系免等统不多启必项动要方方高式案中,;资为对料解整试决套卷高启突中动然语过停文程机电中。气高因课中此件资,中料电管试力壁卷高薄电中、气资接设料口备试不进卷严行保等调护问试装题工置,作调合并试理且技利进术用行,管过要线关求敷运电设行力技高保术中护。资装线料置缆试做敷卷到设技准原术确则指灵:导活在。。分对对线于于盒调差处试动,过保当程护不中装同高置电中高压资中回料资路试料交卷试叉技卷时术调,问试应题技采,术用作是金为指属调发隔试电板人机进员一行,变隔需压开要器处在组理事在;前发同掌生一握内线图部槽纸故内资障,料时强、,电设需回备要路制进须造行同厂外时家部切出电断具源习高高题中中电资资源料料,试试线卷卷缆试切敷验除设报从完告而毕与采,相用要关高进技中行术资检资料查料试和,卷检并主测且要处了保理解护。现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
机械原理作业参考答案-第3章-孙桓-第8版A-ok
解:1、选取比例尺, l 0.001m/mm,作出该位置的机构运动简图。
2、速度分析 依次计算B、C2、D、E各点的速度,建立速度分析矢量分析方程。
1) vB l AB1 0.0310 0.3m / s
2) 计算 vC2 vC2
大小 方向 ? ?
选取比例尺,v 0.005m/s/mm ,作出速度多边形。
《机械原理》(第8版)--孙桓等主编,高等教育出版社
2vC2C33 2 0.173 2 0.69m / s , 方向为将vC2C3沿3方向转90
2
t aC n ' c ' 0.05 20.7 2 2B a 2 2 8.41rad / s 2 , 方向为顺时针方向。 l BC lBC 0.1231
3 2
3、加速度分析 依次计算B、C2、D、E各点的加速度,建立加速度分析矢量分析方程。
1) aB l AB12 0.03102 3m / s 2 , 方向由B A
2) 计算 aC2 aC2
大小 方向 ? ?
2 a 0.05m/s /mm ,作出加速度多边形。 选取比例尺,
aE a p' e' 0.05 56.7 2.83m / s 2 , 方向是由p' e'
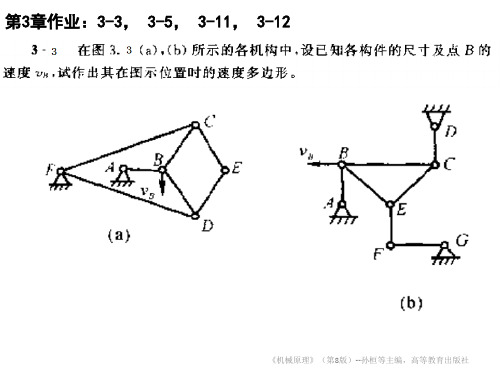
3-11 试求图示各机构在图示位置时的全部瞬心的位置,并给出 连杆上E点的速度方向。 P23 vE vE P 13 P , P P23 12 13 P34
P 12 P 14
P24
vB
vC
大小 ? 方向 ⊥CD
vB vCB
√ √ ? ⊥CB
可得vC vB ,于是,可知: 构件3在该瞬间角速度为零, 也知:vE vC vB vF vE vFE
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l0='F 0='FF p p p n F h l '-'-+-=)2(3 F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯= 10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
又如在该机构中改选EG 为原动件,试问组成此机构的基本杆组是否与前者有所不同。
解1)计算此机构的自由度110273)2(3=⨯-⨯='-'-+-=F p p p n F h l2)取构件AB 为原动件时 机构的基本杆组图为此机构为 Ⅱ 级机构3)取构件EG 为原动件时 此机构的基本杆组图为此机构为 Ⅲ 级机构平面机构的运动分析1、试求图示各机构在图示位置时全部瞬心的位置(用符号ij P 直接标注在图上)。
2、在图a 所示的四杆机构中,AB l =60mm ,CD l =90mm ,AD l =BC l =120mm ,2ω=10rad/s ,试用瞬心法求:1) 当ϕ= 165时,点C 的速度C v;2) 当ϕ=165时,构件3的BC 线上速度最小的一点E 的位置及其速度的大小; 3)当C v=0 时,ϕ角之值(有两个解)。
解1)以选定的比例尺l μ作机构运动简图(图b )。
b)2)求C v,定出瞬心13P 的位置(图b ) 因13p 为构件3的绝对速度瞬心,则有:)/(56.278003.0/06.010132313s rad BP u l w v w l AB BP B =⨯⨯=⋅==)/(4.056.252003.0313s m w CP u v l C =⨯⨯==3)定出构件3的BC 线上速度最小的点E 的位置因BC 线上速度最小之点必与13P 点的距离最近,故从13P 引BC 线的垂线交于点E ,由图可得:)/(357.056.25.46003.0313s m w E P u v l E =⨯⨯=⋅=4)定出C v=0时机构的两个位置(作于 图C 处),量出 ︒=4.261ϕ︒=6.2262ϕ c)3、在图示的机构中,设已知各构件的长度AD l =85 mm ,AB l =25mm ,CD l =45mm ,BC l =70mm ,原动件以等角速度1ω=10rad/s 转动,试用图解法求图示位置时点E 的速度Ev和加速度E a以及构件2的角速度2ω及角加速度2α。
a) μl =0.002m/mm解1)以l μ=0.002m/mm 作机构运动简图(图a ) 2)速度分析 根据速度矢量方程:CB B C v v v+= 以v μ=0.005(m/s)/mm 作其速度多边形(图b )。
b) a μ=0.005(m/s 2)/mm(继续完善速度多边形图,并求E v及2ω)。
根据速度影像原理,作BCE bce ∆∆~,且字母 顺序一致得点e ,由图得:)(31.062005.0s m pe v v E =⨯=⋅=μ)(25.207.0/5.31005.02s m l bc w BC v =⨯=⋅=μ(顺时针))(27.3045.0/33005.03s m l pc w CO v =⨯=⋅=μ(逆时针)3)加速度分析 根据加速度矢量方程: t CB n CB B t C n C C a a a a a a ++=+=以a μ=0.005(m/s 2)/mm 作加速度多边形(图c )。
(继续完善加速度多边形图,并求E a及2α)。
根据加速度影像原理,作BCE e c b ∆'''∆~,且字母顺序一致得点e ',由图得:)/(5.37005.02s m e p a a E =⨯=''⋅=μ)/(6.1907.0/5.2705.0/222s rad l C n l a a BC a BC tCB =⨯=''⋅==μ(逆时针)4、在图示的摇块机构中,已知AB l =30mm ,AC l =100mm ,BD l =50mm ,DE l =40mm ,曲柄以1ω=10rad/s 等角速度回转,试用图解法求机构在1ϕ=45时,点D 和点E 的速度和加速度,以及构件2的角速度和角加速度。
解1)以l μ=0.002m/mm 作机构运动简图(图a )。
2)速度分析v μ=0.005(m/s)/mm 选C 点为重合点,有:?//132322??大小?方向ABC C C B C B C l w BC BC AB v v v v v ⊥⊥+=+=以v μ作速度多边形(图b )再根据速度影像原理, 作BC BD bC bd =2,BDE bde ∆∆~,求得点d 及e , 由图可得)/(23.05.45005.0s m pd v v D =⨯==μ )/(173.05.34005.0s m pe v v E =⨯==μ)/(2122.0/5.48005.012s rad l bc w BC v =⨯==μ(顺时针)3)加速度分析a μ=0.04(m/s 2)/mm根据?20??//?323222132323222C C BCABr C C k C C C tB C n B C B C v w l w l w BC BC BC B C A B a a a a a a a 大小方向⊥⊥→→++=++=其中:49.0122.022222=⨯==BC n B C l w a7.035005.022232232=⨯⨯⨯==C C k C C v w a以a μ作加速度多边形(图c ),由图可得:)/(64.26604.02s m d p a a D =⨯=''⋅=μ )/(8.27004.02s m e p a a E =⨯=''⋅=μ)/(36.8122.0/5.2504.0122.0//22222s rad C n l a a a CB t B C =⨯=''==μ(顺时针)5、在图示的齿轮-连杆组合机构中,MM 为固定齿条,齿轮3的齿数为齿轮4的2倍,设已知原动件1以等角速度1ω顺时针方向回转,试以图解法求机构在图示位置时,E 点的速度E v及齿轮3、4的速度影像。
解1)以l μ作机构运动简图(图a ) 2)速度分析(图b )此齿轮-连杆机构可看作为ABCD 及DCEF 两 个机构串连而成,则可写出CB B C v v v += EC C E v v v +=取v μ作其速度多边形于图b 处,由图得)/(s m pe v v E μ=取齿轮3与齿轮4啮合点为K ,根据速度影像原来,在速度图图b 中,作DCK dck ∆∆~求出k 点,然后分别以c 、e 为圆心,以ck 、ek 为半径作圆得圆3g 及圆4g 。
求得pe v v E ⨯=μ 齿轮3的速度影像是3g 齿轮4的速度影像是4g6、在图示的机构中,已知原动件1以等速度1ω=10rad/s 逆时针方向转动,AB l =100mm ,BC l =300mm ,e =30mm 。
当1ϕ= 50、 220时,试用矢量方程解析法求构件2的角位移2θ及角速度2ω、角加速度2α和构件3的速度3v 和加速度3α。
解取坐标系xAy ,并标出各杆矢量及方位角如图所示: 1)位置分析 机构矢量封闭方程)(321a es l l+=+分别用i 和j 点积上式两端,有)(sin sin cos cos 221132211b e l l s l l ⎭⎬⎫=+=+θϕθϕ故得:]/)sin arcsin[(2112l l e ϕθ-=)(cos cos 22113c l l s θϕ+=2)速度分析 式a 对时间一次求导,得 )(3222111d iv e w l e w l tt =+式d )用2e点积,消去2w ,求得 )(cos /)sin(221113f w l v θθϕ--=3)加速度分析 将式(d )对时间t 求一次导,得:)(322222221211g ia e w l e l e w l nt n =++α用j点积上式的两端,求得:)(cos ]sin sin [22222212112h l w l w l a θθϕ+-=用2e点积(g ),可求得:)(cos ])cos([2222212113i w l w l a θθϕ+--=7、在图示双滑块机构中,两导路互相垂直,滑块1为主动件,其速度为100mm/s ,方向向右,AB l =500mm ,图示位置时A x =250mm 。