第六章静定结构位移计算习题.doc
第六章静定结构位移计算习题
静定结构位移计算试题一、是非判断:1.变形体虚功原理仅适用于线弹性体系,不适用于非线弹性体系。
( ) 2.虚功中的力状态和位移状态是彼此独立无关的,这两个状态中的任何一个都可看作是虚设的。
( ) 3.功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。
( ) 4.位移反力互等定理对线弹性的静定结构和超静定结构均适用。
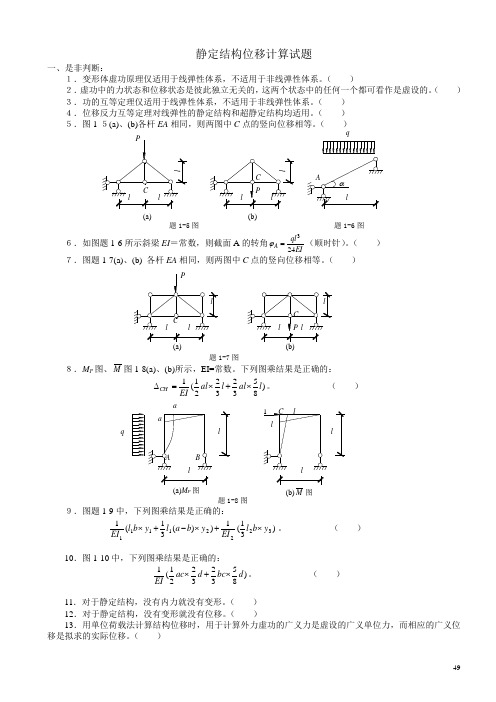
( ) 5.图1-5(a)、(b)各杆EA 相同,则两图中C 点的竖向位移相等。
( )题1-5图 题1-6图6.如图题1-6所示斜梁EI =常数,则截面A 的转角EIql A 243=ϕ(顺时针)。
( ) 7.图题1-7(a)、(b) 各杆EA 相同,则两图中C 点的竖向位移相等。
( )题1-7图8.M P 图、M 图1-8(a)、(b)所示,EI=常数。
下列图乘结果是正确的:)85323221(1l al l al EI CH ⨯+⨯=∆。
( )题1-8图 9.图题1-9中,下列图乘结果是正确的:)31(1))(31(132221111y b l EI y b a l y b l EI ⨯+⨯-+⨯。
( )10.图1-10中,下列图乘结果是正确的:)85323221(1d bc d ac EI ⨯+⨯。
( )11.对于静定结构,没有内力就没有变形。
( ) 12.对于静定结构,没有变形就没有位移。
( )13.用单位荷载法计算结构位移时,用于计算外力虚功的广义力是虚设的广义单位力,而相应的广义位移是拟求的实际位移。
( )q(a)(b)l a aqABP (b)M 图题1-9图 题1-10图14.如果结构是由线弹性材料制成的,但在有温度变化的情况下,功的互等定理不成立。
( ) 二、填空1.虚功原理有两种不同的应用形式,即 原理和 原理。
其中 原理等价于变形协调条件。
2.位移计算时,虚拟广义单位力的原则是使外力虚功的值恰好等于 值。
3.用图乘法计算梁和刚架位移的适用条件是 。
4.如图2-4所示结构支座A 下沉a ,支座B 向右移动b ,则结点C 、D 的相对转角为 。
结构力学静定结构位移计算习题解答

6-1 求图示桁架AB 、AC 的相对转角,各杆EA 为常量。
解:(1)实状态桁架各杆的轴力如图(b )所示。
(b)(a)N(d )(c)题6-1N N(2)建立虚设单位力状态如(c )所示,求AB 杆的转角。
1113(2)82i P iAB i i P a P a P a N N l P a a a E A EA EA EA EAϕ⋅⋅⋅⋅-⋅-⋅⋅⋅==++⨯=∑(↺)(3)建立虚设单位力状态如(d )所示,求AC 杆的转角。
113(2)()(72i P i AC i iP a P a N N lPa a E A EA EA EAϕ⋅⋅⋅-⋅-⋅⋅==+⨯=∑(↺)故,AB 、AC 的相对转角为两杆转角之差:8(7(10.414AB AC P P P PEA EA EA EAϕϕϕ+-=-=-==-(夹角减小)6-2 求半圆曲梁中点K 的竖向位移。
只计弯曲变形。
EI 为常数。
方法一 解:(1)荷载作用下的实状态的约束反力如图(a )所示。
以任意半径与水平坐标轴的顺时针夹角为自变量,其弯矩方程为:sin (0)P M θθπ=-≤≤Pr(2)建立虚设单位力状态如(b )所示,其弯矩方程为:[]1cos )(0)2211cos()cos )()222i M πθθππθθθπ⎧≤≤⎪⎪=⎨⎪-=≤≤⎪⎩(r -r r -r (r +r(a)题6-2(3)积分法求半圆曲梁中点K 的竖向位移。
20233220022311cos )(sin )cos )(sin )2211cos )sin cos )sin sin sin 2)sin sin 2)2222cos 2i V Pk Pr Pr M M ds rd rd EIEI EI Pr Pr d d d d EI EI Pr EI πππππππππθθθθθθθθθθθθθθθθθθθ⋅-⋅-⋅∆==+⎡⎤⎡⎤=-⋅+⋅=-+⋅⎢⎥⎢⎥⎣⎦⎣⎦=-∑⎰⎰⎰⎰⎰⎰⎰(r -r (r +r (-(+(-(+(-11320211cos 2)cos cos 2)442Pr EI πππθθθ⎡⎤⎢⎥+-+=-↑⎢⎥⎣⎦()( 方法二:本题也可以只算纵向对称轴左边,再乘2。
静定结构的位移计算

第4章
二、单位荷载法
1、定义:应用虚力原理,通过加单位力求实际位移的方法。 2、计算结构位移的一般公式
PK=1 RK
1
RK RK3
2
( a , a , a , Ca )
位移状态
RK
4
(M K ,Q K , N K , RK )
虚力状态
对上述两种状态应用虚功原理:
1 Ka R K 1 C a1 R K 2 C a 2 M K a ds Q K a ds N K a ds
P/2
P/2
c
c
CV
4、结构的动力计算和稳定分析中,都常需计算结 构的位移。
第4章
三、计算位移的有关假定
2、小变形假设。变形前后荷载作用位臵不变。 3、结构各部分之间为理想联结,不计摩擦阻力。 4、当杆件同时承受轴力与横向力作用时, 不考虑由于杆 弯曲所引起的杆端轴力对弯矩及弯曲变形的影响。
ω1
ω2
MP图
1 Δ (ω1 y1 ω2 y2 ) EI
第4章
3、当杆件为变截面时亦应分段计算; y1
EI1
y2
EI 2
MK图
ω1
EI1
ω2
EI 2
MP图
1 1 Δ ω1 y1 ω2 y2 EI1 EI 2
第4章
4、图乘有正负之分:弯矩图在杆轴线同侧时,取正号; 异侧时,取负号。
13860 0.0924m( ) EI
第4章
例题 试求左图所示刚架C点的竖向位移AV和转角C。 EI 1.5 105 KN m 2 各杆材料相同,截面抗弯模量为:
MB A
力状态(状态1)
第6章 静定结构位移计算

二、 单位荷载法 1、定义:在所求点所在位移方向加上单位 力,将实际状态的真实位移视作虚拟平衡状态的 虚位移。应用虚功原理,通过加单位荷载求实际 位移的方法。 2、计算结构位移的一般公式
F K+ FRiCi= M d + FNdu + FQdv
式中, F =1 则
六.线弹性体系的特征 1)结构的变形与其作用力成正比
若单位力P1=1作用下产生
的位移δ ,则力P作用下在 K处产生的位移为Pδ
2)结构的变形或位移服从叠加原理
P1
P2
Pi
K Δ
Pn
δ K i 表示Pi=1时 在K处产生的位移。
Δ= P1 K 1 P2 K 2 Pn Kn
P
i i 1
n
Ki
6.2 变形体系的虚功原理 一、变形体的虚功原理 功:力对物体作用的累计效果的度量。 功=力×力作用点沿力方向上的位移 实功 :力在自身引起的位移上所作的功 静力荷载:荷载由零逐渐以微小的增量缓慢地增加 到最终值。结构在静力加载过程中,荷载及内力始 终保持平衡。
虚功: 力在其他因素引起的位移上作的功 其特点是位移与作功的力无关,在作功的过程 中,力的大小保持不变 梁弯曲后,再在点2处加静力荷载FP2,梁产生新 的弯曲。位移△12为力FP2引起的FP1的作用点沿FP1 方向的位移。力FP1在位移△12 上作了功,为虚功, 大小为 W12=FP1△12,此时力不随位移而变化,是 常力。
单位广义力有截然相反的两种设向,计算出的 广义位移则有正负之分: 正值表示广义位移的方向与广义力所设的指向相同 负值表示广义位移的方向与广义力所设的指向相反
力的虚设方法
Fp=1 C Fp=1 B C
《结构力学习题集》6-位移法
第六章 位移法一、是非题1、位移法未知量的数目与结构的超静定次数有关。
2、位移法的基本结构可以是静定的,也可以是超静定的。
3、位移法典型方程的物理意义反映了原结构的位移协调条件。
4、结 构 按 位 移 法 计 算 时 , 其 典 型 方 程的 数 目 与 结 点 位 移 数 目 相 等 。
5、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。
6、超 静 定 结 构 中 杆 端 弯 矩 只 取 决 于杆 端 位 移 。
7、位 移 法 可 解 超 静 定 结 构 ,也 可 解 静定 结 构 。
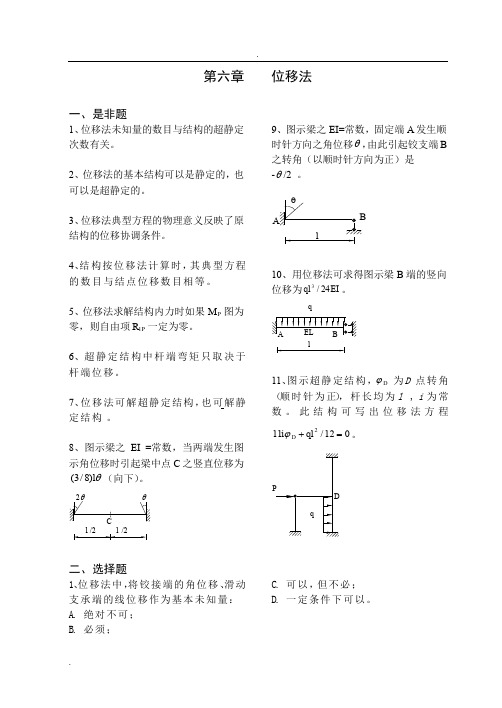
8、图示梁之 EI =常数,当两端发生图示角位移时引起梁中点C 之竖直位移为(/)38l θ(向下)。
/2/22l l θθC9、图示梁之EI =常数,固定端A 发生顺时针方向之角位移θ,由此引起铰支端B 之转角(以顺时针方向为正)是 -θ/2 。
10、用位移法可求得图示梁B 端的竖向位移为ql EI 324/。
q l 11、图 示 超 静 定 结 构 , ϕD 为 D 点 转 角 (顺 时 针 为 正), 杆 长 均 为 l , i 为 常 数 。
此 结 构 可 写 出 位 移 法 方 程 111202i ql D ϕ+=/。
二、选择题1、位 移 法 中 ,将 铰 接 端 的 角 位 移 、滑 动支 承 端 的 线 位 移 作 为 基 本 未 知 量 :A. 绝 对 不 可 ;B. 必 须 ;C. 可 以 ,但 不 必 ;D. 一 定 条 件 下 可 以 。
2、AB 杆 变 形 如 图 中 虚 线 所 示 , 则 A 端的 杆 端 弯 矩 为 :A.M i i i l AB A B AB =--426ϕϕ∆/ ;B.M i i i l AB A B AB =++426ϕϕ∆/ ;C.M i i i l AB A B AB =-+-426ϕϕ∆/ ;D.M i i i l AB A B AB =--+426ϕϕ∆/。
6 静定结构的位移计算1

Ri i
C F (a)
Ri i
首先在图6.5(a)上取ds微段,其上由于单位荷载1所 产生的内力FN 、M、FS作用下所引起的相应变形为du、 dφ、γds分别如图6.5(c)、(d)、(e)所示,其计算式分别为
第六章 静定结构的位移计算
第六章 静定结构的位移计算
刚性杆中,取微段ds设为变形体,分析局部变形所引起的 ds 位移。
ds du ds
d
ds
i
d
d
R
d
i
R
d
d
1 (1)三种变形: R
(2)微段两端相对位移:
du ds
ds d ds R
ds
6.4 静定结构在荷载作用下的位移计算
利用上式计算静定结构在荷载作用下的位移时,
第六章 静定结构的位移计算
广义力与广义位移
作功的两方面因素:力、位移。与力有关的因素, 称为广义力S。与位移有关的因素,称为广义位移Δ。 广义力与广义位移的关系是:它们的乘积是虚功。 即:T=SΔ 1)广义力是单个力,则广义位移是该力作用点的位移 在力作用方向上的分量
2)广义力是一 个力偶,则广义 位移是它所作用 的截面的转角β。
FN p FN EA
l
ds
FN p FN EA
ds
l
FN p FN l EA
组合结构
△KP=
F F L M M P ds N NP EA EI
第六章 静定结构的位移计算
(1)梁和刚架 梁式杆的位移中弯矩的影响是主要的 ,位移计算公式 中取第一项便具有足够的工程精度
结构力学(第五版)第六章 结构位移计算

相对位移 △CD= △C+ △D
3. 计算位移的目的
(1)校核结构的刚度。 (2)结构施工的需要。 (3)为分析超静定结构打 基础。
△ 起拱高度
除荷载外,还有一些因素如温度变化、支座移动、 材料收缩、制造误差等,也会使结构产生位移。 结构力学中计算位移的一般方法是以虚功原理为 基础的。本章先介绍变形体系的虚功原理,然后讨论 静定结构的位移计算。 返4回
B
变力 W= 1 M· ϕ 2
(d )
返6回
P
(2)实功与虚功 实功: 力本身引起的位移上所作的功。 例如: W=
A 力在其它 虚功: 因素引起的位移上所作 的功。力与位移是彼此无关的量,分别属于同一体系 的两种彼此无关的状态。
△2
2
A
P1
△1
1
B P2 B
例如:
W12=P1·△2
返7回
2. 变形体的虚功原理:
A RA
P
M
q B dS
q
RB N+dN Q+dQ
Q N 力状态 A
ds B dS
dWi=Ndu+QγdS+Mdϕ Wi=
(6—2)
整个结构内力的变形虚功为
虚功方程为
W=
(6—3)
dS du
dϕ
γ γ
dS
位移状态
dS
9
返dx γ回
§6—3 位移计算的一般公式
k 1. 位移计算的一般公式 t1 K △K t2 c3 K ds 设平面杆系结构由 ds k R 3 K′ 于荷载、温度变化及支 k P1 座移动等因素引起位移 du、dϕ、γdS N MQ 、、 如图示。 R 1 c2 求任一指定截面K K c1 2 沿任一指定方向 k—k 实际状态-位移状态 R 虚拟状态-力状态 上的位移△K 。
第六章结构位移计算
广义的位移——角、线位移;相对、绝对位移
△C
△D
C C′
A
A
F F
D′ D
B
B
3. 引起位移的原因
(1)荷载作用——内力——变形——位移 (2)温度变化——结构变形——位移 (3)支座位移——几何位置改变——位移
5 第六
4.计算结构位移的目的
1)校核刚度——位移是否超过许用限值,防止构件和结构产
生过大的变形而影响结构的正常使用。
F
W 1 F 变力功 2
9 第六
F
M=Fd
d F
F
WM 力偶功
广义力可以是一个集中力、一对集中力,也可以 是一个力偶、一对力偶;广义位移是相应的沿力方向 的线位移和沿力偶转向的角位移或相对位移。
10 第六
其他形式的力或力系所作的功也用两个因子的 乘积表示为:功=广义力×广义位移
1)作功的力系为一个集中力 2)作功的力系为一个集中力偶
§6—2 变形体系的虚功原理
§6—3 位移计算的一般公式
A′
§6—4 静定结构在荷载作用下的位移计算
§6—5 图乘法
§6—6 静定结构温度变化时的位移计算
§6—7 静定结构支座移动时的位移计算
§6—8 线弹性结构的互等定理
3 第六
§6—1 概 述
1. 变形和位移
任何结构都由可变形体(固体)材料组成, 在荷载作用下会产 生变形和位移。
A''
B''
将ds虚位移分解为:
C
D
刚体虚位移: ABCD A'B'C'D'
变形虚位移: A'B'C'D' A''B''C''D''
6 静定结构的位移计算2
三,应用图乘法的几个具体问题
对于两个图形都是梯形的情况(异侧) 对于两个图形都是梯形的情况(异侧)
A a C
A 1
MP1
A 2
MP2
B b D
y2
MP 图
y1
d
1 1 1 ∫ MP Mdx = EI (∫ Mp1Mdx + ∫ Mp2 Mdx) = EI ( A1 y1 + A2 y2 ) EI
c
3 5PL Ay0 1 1 L L8EI EI EI 2 2 2 6
点竖向位移. 例 7: 计算图示结构 点竖向位移. : 计算图示结构A点竖向位移
AV
3 Ay0 1 qL 3L qL4 =∑ = × × = EI EI 3 4 4EI
AV
A
C
1 M =1 =1 M
B
M
l
ql / 4
2
l
ql 2 / 4
A y0 EI
0
1/ l
q
MP
解:作荷载弯矩图和单位荷载弯矩图
C =
ql / 4 ql / 4
∑
1 2 ql 2 1 = × × ×l × EI 3 8 2 ql 3 ( ) = 24 EI
组合结构, 例 9. 已知 组合结构,求△Dy.
6-7 静定结构支座移动时的位移计算
静定结构由于支座移动不会产生内力和变形, 静定结构由于支座移动不会产生内力和变形,
k = ∑ FR c + ∑ ∫ FN du + ∑ ∫ M d + ∑ ∫ FS γds
得到: 得到:
Kc = ∑ FR c
仅用于静定结构
h
1 1
l/2
l/2 a
结构力学 静定结构的位移计算1
P
A
3.位移计算的一般公式
设:结构受荷载的作用, 及支座移动,求A点的竖 向位移。
W外=W变
外力所作的虚功总和W外,等于 各微段截面上的内力在其虚变 形上所作的虚功的总和W变 。
1)位移状态的设定 q
P A
dx
a) 若求结构上C点的竖向位移,
2) 若求结构上截面A的角位移,可在截面处加一单位力矩。
若求桁架中AB杆的角位移,应 加一单位力偶,构成这一力 偶的两个集中力的值取 1/d。 作用于杆端且垂直于杆(d等 于杆长)。
3) 若要求结构上两点(A、B)沿其连线 的相对位移,可在该两点沿其连线 加上两个方向相反的单位力。
A
2)作 M 图 P=1
A C
1.5 M1 图
B 2m
6
B
B
D
66
A
BB
D
9
1
CV
1 1 61.5 3
EI 2
2 2 3 9 5 1.5
EI 3
8
189
=
(向下)
4EI
2)作 M 图
A
BD
6 6
M2 图
A
BB
D
9
1
D
1 EI
一、概述
1.位移的种类
1) 角位移:杆件横截面产生的转角 2) 线位移:结构上各点产生的移动 3) 相对位移(相对角位移,相对线位移)
Aθ
Δ A
θ
(A截面的转角θ )
(A结点的水平线 位移Δ,转角θ)
ΔA A
第6章 位移计算
2 0
钢筋混凝土结构G≈0.4E,矩形截面,k=1.2,I/A=h2/12
FQ M EI 1h k GAr 2 4 r
h <1 r 10 FQ 1 < M 400 FN
2
FN I 1 h 2 M Ar 12 r
2
如
M
D
E
3c
d
C B
c
A
P 3 3 b 3b ctg X 2 2 2c 4c 3 b 0 (3)解方程求X X X P X 2 2c
b
x x X
3b X P 4c
小结:1)虚功原理(这里是用虚位移原理)的特点是用几 何方法解决平衡问题。 2)求解问题直接,不涉及约束力。
a qa
2a qa2
D
a
C
FQC
2a
B
a
A
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
FQC
0.25
0.5
虚功方程为: +qa×0.25 -qa2×0.25/a -q×(1×2a/2+0.5 ×a/2 )=0 FQC×1
FQC=1.25qa
1
0.25/a
作功的两方面因素:力、位移。
广义力 单个力 单个力偶 等值反向共线的一对力
真实 位移 状态
注:(1)EI、EA、GA是杆件截面刚度; k是截面形状系数k矩=1.2, k圆=10/9。 (2)FNP、FQP、MP实际荷载引起的内力, 是产生位移的原因;虚设单位荷载 引起的内力是 F N , F Q , M
F N FNP F Q FQP MM P iP k ds EA GA EI
静定结构位移计算典型例题(附详细解题过程)
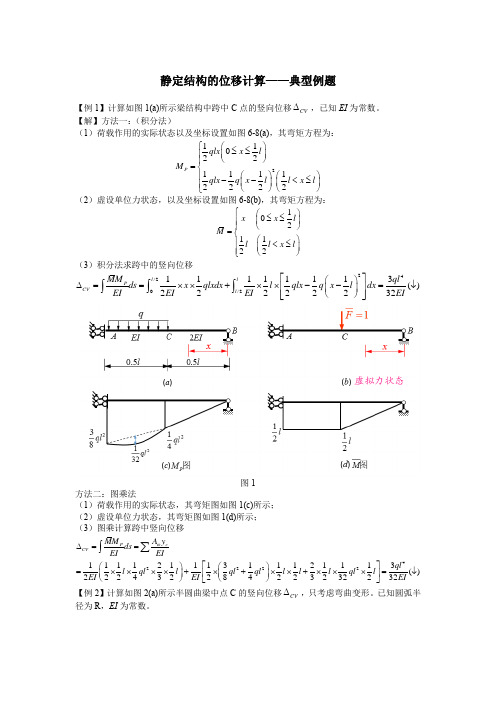
静定结构的位移计算——典型例题【例1】计算如图1(a)所示梁结构中跨中C 点的竖向位移,已知EI 为常数。
【解】方法一:(积分法)(1)荷载作用的实际状态以及坐标设置如图6-8(a),其弯矩方程为:(2)虚设单位力状态,以及坐标设置如图6-8(b),其弯矩方程为:(3)积分法求跨中的竖向位移图1方法二:图乘法(1)荷载作用的实际状态,其弯矩图如图1(c)所示; (2)虚设单位力状态,其弯矩图如图1(d)所示; (3)图乘计算跨中竖向位移【例2】计算如图2(a)所示半圆曲梁中点C 的竖向位移,只考虑弯曲变形。
已知圆弧半径为R ,EI 为常数。
CV ∆21102211112222P qlx x l M qlx q x l l x l ⎧⎛⎫≤≤ ⎪⎪⎝⎭⎪=⎨⎛⎫⎛⎫⎪--<≤ ⎪ ⎪⎪⎝⎭⎝⎭⎩1021122x x l M l l x l ⎧⎛⎫≤≤ ⎪⎪⎪⎝⎭=⎨⎛⎫⎪<≤ ⎪⎪⎝⎭⎩24/20/211111113()22222232l l P CVl MM ql ds x qlxdx l qlx q x l dx EI EI EI EI ⎡⎤⎛⎫∆==⨯⨯+⨯⨯--=↓⎢⎥ ⎪⎝⎭⎢⎥⎣⎦⎰⎰⎰4222211112111311121113()222432284223232232cPCV A y MM ds EI EI ql l ql l ql ql l l l ql l EI EI EI ω∆==⎡⎤⎛⎫⎛⎫=⨯⨯⨯⨯+⨯+⨯⨯+⨯⨯⨯=↓ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦∑⎰CV ∆图2【解】(1)实际荷载作用下,以任意半径与x 轴的顺时针夹角θ为自变量(图2a ),弯矩方程为(截面内侧受拉为正):(2)虚设单位荷载状态如图2(b)所示,其弯矩方程为:(3)积分法求跨中的竖向位移【例3】如图3(a)所示梁的EI 为常数,在荷载F 作用下测得结点E 的竖向位移为9mm (向下),求截面B 处的角位移。
位移计算

M
Δ
θ
W = PΔ
W = Mθ
3)作虚功的力系为两个等值 反向的集中力偶
4)作虚功的力系为两个等值 反向的集中力
P
ΔA ΔB
P
M
M
θA
θB
W = PΔA + PΔB = P(ΔA +ΔB) = PΔ
W = MθA + MθB = M(θA +θB) = Mθ
三、变形体的虚功原理 (1)刚体系的虚位移原理 去掉约束而代以相应的 反力,该反力便可看成外 力。则有:刚体系处于平 XA = 0 衡的必要和充分条件是: 对于任何可能的 虚位移,作用于刚 体系的所有外力所 做虚功之和为零。
注意到微段处于平衡状态,则有外力在刚体位移上作功dWs = 0
故有δWe=δWv成立。
四、虚功原理的两种应用
1)虚功原理用于虚设的协调位移状态与实际的 平衡力状态---虚设位移求力系。
例. 求 A 端的支座反力(Reaction at Support)。 直线 P P Δ A B
X
C
ΔC
a
b (a)
三、 仅有荷载作用: 线弹性杆系结构单位荷载法位移计算公式有:
FN P δε = ; EA
δγ = k
FQP GA
;
M xP δϕ = ; GI ρ
MP δθ = ; EI
式中: E 弹性模量; G A k IP 横截面积; I
剪切模量; 截面惯性矩;
截面形状系数。如:对矩形截 面k=6/5;圆形截面k=10/9。 截面极惯性矩;
1 ⋅ Δ + YA ⋅ c = 0 虚功方程为: Δ = b⋅c / a 解得: 这是单位荷载法 (Dummy-Unit Load Method) 它是 Maxwell, 1864和Mohr, 1874提出,故也称为 Maxwell-Mohr Method
静定结构的位移计算—静定结构在支座移动时的位移计算(建筑力学)

F RBx
2h
1
1
A F R c 0.06 0.04 rad 0.0075 rad
2h
l
()
静定结构的位移计算
例16-11 图示桁架各杆EA相同,支座B发生竖向位移
c=0.5cm,求c点的水平位移△CH。
解:建立虚拟状态,并计算由于水平单位力作用.5cm 0.5cm
由于实际状态中取出的微段ds的变形du=0、d=0、
dv=0 ,于是上式可简化为:
K F R c
式中F R — —虚拟状态的支座反力;
c ——实际状态的支座位移。
静定结构的位移计算
K F R c
注意:当虚设状态的反力和支座位移c方向一致时,其
乘积取正,相反时为负。另外,上式右边前面还有一负号
静定结构的位移计算
第六节 静定结构在支座移动时的位移计算
对于静定结构,支座移动并不产生内力和变形,结构的
位移纯属刚体位移
对于简单的结构,这种位移可由几何关系直接求得,但
一般的结构仍用虚功原理来计算这种位移。
静定结构的位移计算
由虚功原理推导出的位移计算的一般公式为
K F Ndu M d F Qdv F R c
,系原来移项时所得,不可漏掉。
静定结构的位移计算
例16-10 三铰刚架的跨度 l=12m,高h=8m。已知右支座B
的竖向位移为1 =0.06m(向下),水平位移为2 =0.04m(向
右),如图示,试求由此引起的A端转角 。
解 由∑MA=0得
F RBy
1
l
再考虑右半刚
架的平衡
1
由∑Mc=0得
7.8超静定结构的位移计算

1 l/4 l/4
1
1 ( FP l ) 4
M图
M 1 图之一
M 1 图之二
解:(1)作原超静定结构的最后弯矩图 (2)作虚拟力状态下的单位弯矩图 (3)用图乘法求位移
ΔDV Ay MM 1 ds 0 EI EI EI 3FP l 3 () 1408EI
A B
q
a l
3EI a (q ) l l
M图
解: (1)作原超静定梁 的 最后弯矩图
All Rights Reserved 重庆大学土木工程学院®
q
A B
q
a l
3EI a (q ) l l
M图
1
FR 1
1
M 图
(2)作虚拟力状态下的单位弯矩图 (3)计算位移:
qB
MM ds FR c EI 1 1 3EI a q 3a l (q ) (1) 1 q EI 2 l l 2 2l
All Rights Reserved 重庆大学土木工程学院®
1
" " y02 y01
l/2
l/4
l/2
M 1图
• 计算超静定结构位移的基本思路:利用基本体系求原结构的位移.
将计算出的多余未知 力作为外荷载
超静定结构
静定结构
• 计算超静定结构位移的步骤
1、解超静定结构,作超静定结构的最终内力图;
2、取原结构的任一基本结构作为虚拟状态,并作虚拟力状态下 的单位内力图;
ql 12
2
5 l 3 l ql 2 8 2 8 2 ( )
静定结构位移计算

自测题(三)(一) 填空题1. 虚功是指____________________________________________。
2.虚功原理的内容为__________________________________________________,其三要素是__________,__________,和___________,其中__________和_________是同一变形体系的两个相互独立的状态。
3. 虚功原理有两种不同的应用途径,虚载荷法是________________________________________,虚位移法是____________________________________________________。
4.图乘法的应用条件是_____________________________________________________,图乘公式01y EIds EI M M P ⋅=⎰ω中y 0必须取自______图中,ωy 0正负号判别方法____________________。
5. 弹性体系的四个互等定理是_________________________,________________________,_____________________,_______________________,它们仅适用于_________________体系。
6.图示两组图P M M ,相乘得结果分别为_____________________________, ________。
7.用虚功原理求结构位移时,因结构和引起位移原因不同,虚功方程具体形式也有所不同,在载荷作用时,对梁和刚架为_____________,对桁架为__________;温变作用时,对梁和刚架为_______________,对桁架为_______;支座变动时,对梁和刚架为_______,对桁架为______;制造误差、初应变作用时,对梁和刚架为____________________________,对桁架为__________;8.已知图(a)所示刚架B 的角位移EIPl B 162=θ(),若在图(b)所示的刚架B 点施加力矩Pl m 20=,根据互等定理可求出该状态BC 杆中k 点处挠度=k f ____,方向_____。
习题课5静定结构的位移计算
静定结构的位移计算
1
一、根据欲求广义位移,试虚拟广义单位力系。 (1) 求 Δ CV + Δ DV , Δ CV − Δ DV
FP C m B D A C D 1 1 B
A
求 Δ CV + Δ DV
1 A C D
2
1 B
求 Δ CV − Δ DV
(2) 求C、D截面相对转角、相对线位移、相对水平 线位移。
ql/2
8
A
q C ql 2/8
l/2 l/2
1 B A
l/2
C l/4
ql 4 解: CK = 96 EI ΔCV
M图
MMP = ΔCV 1 + Δ CV 2 = ∫ dx − ∑ F RK CK A EI 2 2 l 1 2 5 l 1 ql 4 = ( ⋅ ⋅ ql ⋅ ⋅ ) − (− ⋅ ) EI 3 2 8 8 4 2 96 EI ql 4 5ql 4 7ql 4 = + = (↓) 384 EI 192 EI 384 EI
16
(2) 求 Δ CV 及截面B、C相对转角 Δϕ BC。
2kN/m
A
2m
C
6m
EI
B
A
ω1 C
解:
ω1 = ⋅ 2 ⋅12 = 12 y1 = ⋅1.5 = 1
1 2 1 2 3 y1 C EI B 1 A ω 2 = ⋅ 6 ⋅12 = 36 y2 = 1 y3 2 y2 y4 2 4 1 3 2m 1.5 6m ω 3 = ⋅ 2 ⋅1 = y3 = ⋅1.5 = 3 3 2 4 M 1图 2 1 3 ω 4 = ⋅ 6 ⋅ 9 = 36 y4 = ⋅1.5 = 3 2 4 1 1 4 3 3 76 Δ CV = (ω1 y1 + ω 2 y2 + ω3 y3 + ω 4 y4 ) = (12 ⋅1 + 36 ⋅1 + ⋅ + 36 ⋅ ) = (↓) EI EI EI 3 4 4 17
第6章 结构位移计算
(2)分析超静定结构的基础 ——计算位移 ——建立变形条件
(3)动力、稳定计算 ——位移计算
方法: 虚功原理为基础 ——计算位移 ——静定、超静定
§7—2变形体系的虚功原理
虚位移原理(虚功原理)——理论力学 具有理想约束质点系 在某一位置处于平衡的必要和充分条件是, 对于任何虚位移, 作用于质点系的主动力所作的虚功总和为零
cv
1 EI
2
所以相邻截面上内力所做的功大小相等正负号相反,
——即内力所做的功总和等于“0”)
W总=W外
(a)
(2)对按刚体虚功原理与变形体虚功计算
(虚位移分解二步:刚体位移:ABCD → AC’D’
W总=W刚+W变(W刚=0 刚体虚功原理)
W总=W变
(b)
∴W外=W变
EA
EA
*补充说明:剪切变形中改正系数κ
[例7—1] 解:M,N,Q影响比较:
(1)实际状况——M、N、Q (2)讨论:Q、N影响可忽略
[例7—2] 曲杆 解: 实际M→MP 虚力:
M R(1000 )
[例7—3]桁架 解:①P→N图 ②
Pu N
图 ③
NN EA
l
§7—5 图 乘 法
KP
M M P ds EI
积分式 M M P ds
EI
条件:(1)杆轴为直线
(2)EI=常数
(3)至少一个直线图 M , M P
1 EI
xtg
M Pdx
tg
EI
x M Pdx
tg
EI
x
d
1 EI
tg
xc
MP
MP yc
EI
yC
EI
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静定结构位移计算试题
一、是非判断:
1.变形体虚功原理仅适用于线弹性体系,不适用于非线弹性体系。
( ) 2.虚功中的力状态和位移状态是彼此独立无关的,这两个状态中的任何一个都可看作是虚设的。
( ) 3.功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。
( ) 4.位移反力互等定理对线弹性的静定结构和超静定结构均适用。
( ) 5.图1-5(a)、(b)各杆EA 相同,则两图中C 点的竖向位移相等。
( )
题1-5图 题1-6图
6.如图题1-6所示斜梁EI =常数,则截面A 的转角EI
ql A 243
=
ϕ(顺时针)。
( ) 7.图题1-7(a)、(b) 各杆EA 相同,则两图中C 点的竖向位移相等。
( )
题1-7图
8.M P 图、M 图1-8(a)、(b)所示,EI=常数。
下列图乘结果是正确的:
)8
5
323221(1l al l al EI CH ⨯+⨯=∆。
( )
题1-8图 9.图题1-9中,下列图乘结果是正确的:
)3
1(1))(31(132221111y b l EI y b a l y b l EI ⨯+⨯-+⨯。
( )
10.图1-10中,下列图乘结果是正确的:
)8
5
323221(1d bc d ac EI ⨯+⨯。
( )
11.对于静定结构,没有内力就没有变形。
( ) 12.对于静定结构,没有变形就没有位移。
( )
13.用单位荷载法计算结构位移时,用于计算外力虚功的广义力是虚设的广义单位力,而相应的广义位移是拟求的实际位移。
( )
q
(a)
(b)
l a a
q
A
B
P (b)M 图
题1-9图 题1-10图
14.如果结构是由线弹性材料制成的,但在有温度变化的情况下,功的互等定理不成立。
( ) 二、填空
1.虚功原理有两种不同的应用形式,即 原理和 原理。
其中 原理等价于变形协调条件。
2.位移计算时,虚拟广义单位力的原则是使外力虚功的值恰好等于 值。
3.用图乘法计算梁和刚架位移的适用条件是 。
4.如图2-4所示结构支座A 下沉a ,支座B 向右移动b ,则结点C 、D 的相对转角为 。
题2-4图 题2-5图 题2-6图
5.如图2-5所示结构中的AB 杆比原设计长度做短了1.5cm ,由此引起C 点的竖向位移为 ;引起支座A 的水平反力为 。
6.如图2-6所示三铰刚架,EI=常数。
铰C 的竖向位移为 。
7.如图2-7所示结构,EI=常数。
铰C 两截面的相对转角为 。
8.已知图2-8所示连续梁支座B 的反力为)(16
11
↑=P R B ,则该连续梁在支座B 下沉1=∆BV 时,D 点的竖向位移DV ∆为 。
题2-7图 题2-8图
9.已知图2-9(a)所示简支梁在C 点作用集中力P =1kN 时,截面B 的角位移为0.005弧度,则该梁在截面
a
b
1ω
2ω
3ω
EI 1
EI 2
(a)M P 图
y 2
(a)M P 图
(b)M 图
C
C
P
D
B
DV ∆
1
=BV
(a)
(b)
B作用力偶M=4kN·m时(图B),C的竖向位移CV
∆为。
10.已知图2-10(a)所示刚架在图示荷载作用下截面C的角位移为Cϕ,则该刚架在图(b)所示荷载作用下,B点的水平位移BH
∆为。
题2-9图题2-10图
三、计算题
1.如图3-1所示桁架的下弦中点C起拱CV
∆=3cm,试求:桁架的六根下弦杆在制造时比设计长度均做短多少就可达到此要求?
题3-1图题3-2图
2.如图3-2所示刚架施工时的温度为30ºC,冬季外侧温度为–15ºC,内侧温度为15ºC。
各杆截面为相同尺寸的矩形截面,截面高度l
h1.0
=,材料的线膨胀系数为α。
求刚架在冬季温度时铰C的竖向位移CV
∆。
3.如图3-3所示桁架施工时的温度为–5ºC,夏季温度为35ºC。
各杆截面为相同尺寸的矩形截面,材
料的线膨胀系数为α=10-5。
求桁架在夏季温度时铰C的竖向位移
CV
∆。
4.结构的支座移动如图3-4所示,求铰B两侧截面的相对转角BB
ϕ。
5.用单位荷载法求图3-5所示悬臂梁的挠曲线方程。
EI=常数。
6.求如图3-6所示结构A、B两点的相对相对线位移。
各杆EI=常数。
7.求如图3-7所示结构A点的水平位移AH
∆。
已知:q=6kN/m,各杆EI=常数。
P
P
(a)
C
B
A
C
D
E
3m 3m
B
0.01rad
.
3
m
题3-4图
q
3m 3m
A
题3-5图
8.求如图3-8所示结构D 点的竖向位移DV ∆及铰C 两侧截面的相对转角CC ϕ。
已知:q =5kN/m ,各杆EI =常数。
9.如图3-9所示结构,245m kN 104.2kN,104•⨯=⨯=EI EA 。
为使D 点的竖向位移不超过1cm ,所受荷载q 最大为多少?
题3-8图 题3-9图
10.欲使图3-10所示静定梁跨中点B 的挠度为零,求铰C 的位置x =?EI =常数。
11.求图题3-11所示结构D 点的竖向位移DV ∆。
题3-10图 题3-11图
q
5kN/m
14. 用图乘法求图示结构的位移。
AV
(2) 图b 中C 点两侧截面的相对转角()2
4
m KN 101.2⋅⨯=∆
EI C
φ。
(3) 图c 中的B EH φ和∆。
(4) 图d 中的()2
4
m KN 101.2⋅⨯=∆EI CV。
15 图示桁架,若只有杆AD 升高t ℃,求∆,杆的线膨胀系数为α。
16. 图示桁架中,杆件AB 由于制造误差比原设计长度短了40mm ,求由此所引起的点C 的竖向位移。
(a)
(b)
(c)
/2
/2
常数/2
题14图
题13图
17 图示三铰刚架,若其内部温度升高30℃,求点C的竖向位移。
各杆均为矩形截面,截面高度为h,线膨胀系数为α。