蛇形机器人使用说明书
Razer Leviathan V2 用户手册说明书

叶片轮式蛇形机器人
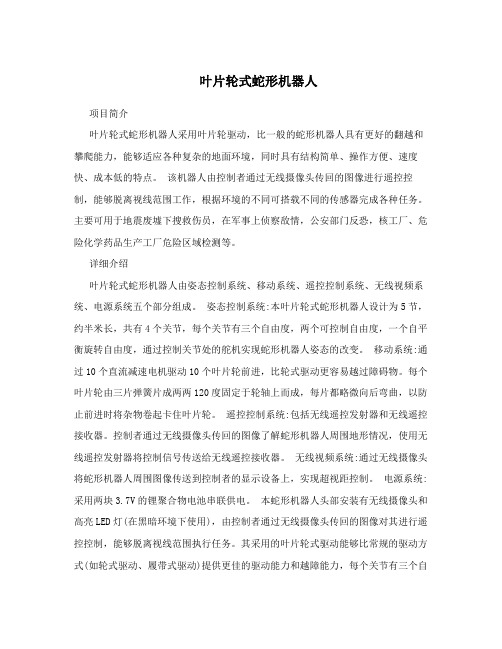
叶片轮式蛇形机器人项目简介叶片轮式蛇形机器人采用叶片轮驱动,比一般的蛇形机器人具有更好的翻越和攀爬能力,能够适应各种复杂的地面环境,同时具有结构简单、操作方便、速度快、成本低的特点。
该机器人由控制者通过无线摄像头传回的图像进行遥控控制,能够脱离视线范围工作,根据环境的不同可搭载不同的传感器完成各种任务。
主要可用于地震废墟下搜救伤员,在军事上侦察敌情,公安部门反恐,核工厂、危险化学药品生产工厂危险区域检测等。
详细介绍叶片轮式蛇形机器人由姿态控制系统、移动系统、遥控控制系统、无线视频系统、电源系统五个部分组成。
姿态控制系统:本叶片轮式蛇形机器人设计为5节,约半米长,共有4个关节,每个关节有三个自由度,两个可控制自由度,一个自平衡旋转自由度,通过控制关节处的舵机实现蛇形机器人姿态的改变。
移动系统:通过10个直流减速电机驱动10个叶片轮前进,比轮式驱动更容易越过障碍物。
每个叶片轮由三片弹簧片成两两120度固定于轮轴上而成,每片都略微向后弯曲,以防止前进时将杂物卷起卡住叶片轮。
遥控控制系统:包括无线遥控发射器和无线遥控接收器。
控制者通过无线摄像头传回的图像了解蛇形机器人周围地形情况,使用无线遥控发射器将控制信号传送给无线遥控接收器。
无线视频系统:通过无线摄像头将蛇形机器人周围图像传送到控制者的显示设备上,实现超视距控制。
电源系统:采用两块3.7V的锂聚合物电池串联供电。
本蛇形机器人头部安装有无线摄像头和高亮LED灯(在黑暗环境下使用),由控制者通过无线摄像头传回的图像对其进行遥控控制,能够脱离视线范围执行任务。
其采用的叶片轮式驱动能够比常规的驱动方式(如轮式驱动、履带式驱动)提供更佳的驱动能力和越障能力,每个关节有三个自由度(一般只有两个),能够取得更好的运动效果。
在不改变机身的情况下,可以通过更换不同的驱动机构来适应不同的运动环境,实现运动效率的高效化。
本蛇形机器人可搭载各种传感器,用于地震废墟下搜救伤员,在军事上用于侦察敌情,公安部门用于反恐,核工厂、危险化学药品生产工厂用于进入危险区域检测,外星探测等。
机器蛇说明书

3
2、抬头运动 抬头运动是模仿自然界中蛇抬头的一种运动。运动时,首先将蛇尾 盘起来,作为支撑,后将蛇头抬到一定的高度,蛇头也可以根据要求进 行偏转和俯仰。抬头运动的主要目的是为了有更好的空间观察能力,观 测周围的环境。 3、横向平移运动 在自然界中,横向平移运动是沙漠中响尾蛇所常 采用的一种运动步态。 机器蛇在横向平移运动过程中, 部分机体与地面接触,作为静态接触点,部分机体抬 起实现空间侧移,如此反复,实现侧向前进。由于运 动过程中,机体是由上向下与地面接触的,所受的摩 擦阻力较小,而且机体与地面有多个接触点,因此适
2
合沙漠、软土等低剪切运动环境。在松软和温度较高的沙漠环境中,如果机器蛇采用横向平 移运动,由于其滑动摩擦阻力小,且部分机体与地面接触,可以大大提高运动的效率。 4、侧向翻滚 侧向翻滚运动是一种自然界中蛇所没有的特殊运动方式, 是蛇体绕其体轴回转的一种运 动模式, 是通过机体在两个互相垂直的平面内形成两个弧形曲线的相互作用实现的。 不同平 面内两相邻模块的相互作用,产生了绕体轴的回转驱动力矩。通过调整弧形曲线的弧度,它 可以实现与地面全接触的纯侧向滚动或部分关节与地面脱离的空间滚动形式。
机器蛇的控制系统
在控制上我们采用无线遥控, 由电脑向机器蛇的控制单元发出各种命令, 操纵机器蛇的 运动。在电脑上,由 MFC 界面操作电脑的串口向无线模块发送数据。蛇身上的主控单片机接 受到无线模块的数据后,根据命令调用闪存内的运动程序,实现各种运动。蛇身上的控制方 式采用了集中式控制。通过单片机的定时器和 11 个 IO 口控制全部的 11 个伺服舵机。 由于 11 个电机带负载同时工作时的输出电流比较大,因此我们用两节 3.7V,1800mAh 的锂聚合物电池串联成一组电池,一共用两组电池分批给 11 个电机以及控制电路供电。
乐高EV3蛇形机器人教案
教 案
课
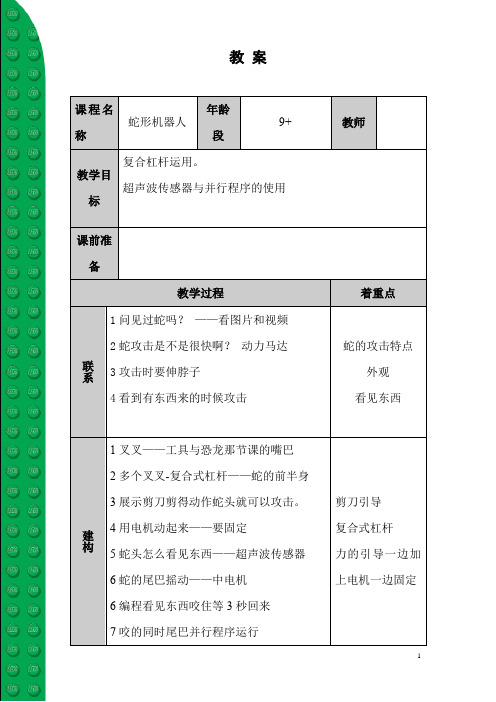
程名称 蛇形机器人 年龄
段
9+ 教师
教学目
标
复合杠杆运用。
超声波传感器与并行程序的使用
课前准
备
教学过程 着重点
联系
1问见过蛇吗? ——看图片和视频
2蛇攻击是不是很快啊? 动力马达 3攻击时要伸脖子 4看到有东西来的时候攻击
蛇的攻击特点 外观 看见东西 建构 1叉叉——工具与恐龙那节课的嘴巴
2多个叉叉-复合式杠杆——蛇的前半身
3展示剪刀剪得动作蛇头就可以攻击。
4用电机动起来——要固定 5蛇头怎么看见东西——超声波传感器 6蛇的尾巴摇动——中电机 6编程看见东西咬住等3秒回来
7咬的同时尾巴并行程序运行
剪刀引导 复合式杠杆 力的引导一边加
上电机一边固定。
机器蛇 仿生机器人 说明书
的旋转。相邻关节正交连接,一个关节在偏转方向旋转,另一个
关节在俯仰方向上旋转,结合起来就可以实现三维空间内的运动。
机器蛇的运动模式
机器蛇对自然界中的蛇的运动方式进行了模仿,如行波运动、拐弯、抬头、横向平移。 同时还结合进了机器蛇自己特有的运动方式:侧向翻滚。由于在复杂的工作环境下,机器蛇 的“腹部”不可能总是与地面接触,机器蛇具有不怕“翻身”的功能。 1、行波运动 机器蛇的主要运动方式是行波运动。 行波运动是依靠波在体内传播而产生的。 机体的部 分关节与支持面接触, 它们与支撑面之间作用力的大小和方向随蛇形机器人运动形态的变化 而改变。各个接触关节在每一刻所受到的摩擦力大小和方向不同,其合力为驱动力。所以, 蛇形机器人的行波运动,可以适应复杂多变的作业环境,诸如穿越狭小的管道、跨越沟壑、 爬坡、上楼梯、越障等。
机器蛇的应用
相对于传统的移动机器人, 蛇形机器人具有很多优点, 能够应用到很多复杂和危险的环 境中。虽然目前蛇形机器人的研究尚处在实验阶段,但蛇形机器人有广泛的应用前景。 机器蛇可以用于在有辐射、有粉尘、有毒及战场环境下,执行侦察任务;在地震、塌方 及火灾后的废墟中找寻伤员; 在航空航天领域可作为行星表面探测器、 轨道卫星的柔性手臂; 在狭小和危险条件下探测和疏通管道; 工业上则可应用于多冗余度柔性机械手臂, 管道机器 人等。
2、抬头运动 抬头运动是模仿自然界中蛇抬头的一种运动。运动时,首先将蛇尾 盘起来,作为支撑,后将蛇头抬到一定的高度,蛇头也可以根据要求进 行偏转和俯仰。抬头运动的主要目的是为了有更好的空间观察能力,观 测周围的环境。 3、横向平移运动 在自然界中,横向平移运动是沙漠中响尾蛇所常 采用的一种运动步态。 机器蛇在横向平移运动过程中, 部分机体与地面接触,作为静态接触点,部分机体抬 起实现空间侧移,如此反复,实现侧向前进。由于运 动过程中,机体是由上向下与地面接触的,所受的摩 擦阻力较小,而且机体与地面有多个接触点,因此适
蛇形模块化机器人产品及技术介绍

SolidSnake-II——模块化机器蛇概述一、应用背景:近几年来,仿生机器人学正在机器人领域占有越来越重要的位置,蛇形机器人由于其结构的特殊性,已成为仿生领域的研究热点。
蛇形机器人在战场上的扫雷,爆破,矿井和废墟中探测营救,管道维修以及外行星地表探测等条件恶劣,且要求有高可靠性的领域有着广阔的应用前景。
模块化设计和高冗余度设计等新思路的提出和逐步完善,使蛇形机器人成为研究的亮点。
二、SolidSnake II 实验样机概述:SolidSnake II 结合了国内外蛇形机器人的发展现状,充分考虑了蛇类生物的运动特点,从仿生学的角度,结合机器人动力学和摩擦学等的相关理论,建立了基于行为控制理论的蛇类运动学模型,把蛇类生物的复杂运动形式化解为局部的、简单的行波状态,并以固定的相位差沿蛇体进行传播。
采用中央处理机(即蛇的大脑)集中控制的方式把各种运动方式进行合成,实现了机器蛇的蠕动、游动、侧移、侧滚、抬头、翻越障碍物等运动形式。
在对蛇类运动机理深入研究的基础上,得出了利用杆状结构的角度变化和运动时延,相位差去控制机器蛇运动的速率和运动方向的规律,并在实验中得到了验证。
三、solid snake – II 创新点详述一)、模块化的机构设计:采用模块化的机构设计,可以很快的组装一条新蛇,而且结合电路系统,可以实现任意节数的组合,以适应不同的应用场合。
单元体模块组成部件有:两节壳体,两个伺服电机,一块从机控制板。
机械对接接口非常简单,只需要五个螺钉即可对接一个单元体。
一个模块化单元体为一个正交的关节,有两个正交方向的自由度,在机械结构与控制结构上均自成一体,通过总线与其他从机及主机通讯。
标准配置的SolidSnake-II 带有外接电池。
但用户可以自行加装电池到每个单元关节,以便无缆运行。
二)、基于行为控制设计的solid snake – II 电路系统及程序构架:1),电路系统构架:在电路设计上采用分布式底层运动控制——高层中枢决策”的控制逻辑,通过i2c 总线通讯。
仿生蛇形机器人设计与应用

声纳与红外感应
仿生蛇形机器人还具备声纳和红外感应功能,能够感知周 围生物和电子设备的存在,为侦察提供更多信息。
目标跟踪与打击
灵活跟踪
凭借其仿生的蛇形结构 ,机器人能够在复杂环 境中实现对移动目标的 跟踪,如车辆、人员等 。
狭小空间救援
仿生蛇形机器人的灵活性和适应性使其能够在狭小的空间中进行 救援,为受灾人员提供及时的援助。
灾害模拟演练
模拟灾害环境
仿生蛇形机器人可以模拟地震、洪水等灾害现场,为救援团队提供 模拟演练的环境。
评估救援能力
通过模拟演练,救援团队可以评估自身的搜救能力和响应速度,为 实际救援提供参考。
培训与教育
超声波传感器
用于测量机器人与周围环境之间的距离,实现机 器人的导航功能。
IMU传感器
用于检测机器人的姿态,帮助机器人保持稳定的 运动状态。
驱动器系统
电机驱动器
用于驱动电机转动,实现机器人的运动。
舵机驱动器
用于驱动舵机转动,控制机器人的姿态和运动方向。
电源系统
电池
为机器人提供电力,一般采用可充电电ቤተ መጻሕፍቲ ባይዱ。
感知系统架构
01
设计感知系统的整体架构,包括传感器数据的采集、处理和传
输。
触觉传感器
02
设计能够模拟蛇的触觉感知的触觉传感器,并开发相应的数据
处理算法。
视觉传感器
03
设计能够模拟蛇的视觉感知的视觉传感器,并开发相应的数据
处理算法。
导航软件设计
1 2
SLAM算法
使用SLAM(同时定位与地图构建)算法实现机 器人的自主导航。
蛇形机器人使用说明书
蛇形使用说明书蛇形使用说明书一、产品概述蛇形是一款具有自主移动能力的,其设计灵感来源于蛇的爬行动作。
蛇形由多个相互连接的模块组成,能够模拟蛇的运动方式,在不同的地形和环境中自由移动。
二、产品特性1.灵活性:蛇形采用模块化设计,每个模块都可以自由弯曲和旋转,使得在复杂地形中的运动更加灵活。
2.自主导航:蛇形配备了先进的导航系统和传感器,能够自主寻找路径并避开障碍物。
3.多功能:蛇形支持多种操作模式,如巡航模式、搬运模式和搜索救援模式,适用于不同场景的需求。
4.轻便易携:蛇形采用轻量化材料制作,便于携带和部署。
三、组装与连接1.将各个模块按照顺序连接起来,确保连接牢固且不松动。
2.在连接处使用连接器固定模块,以确保连接的稳定性。
3.在连接模块时,请确认每个连接器的方向和位置正确,以免造成连接错误。
4.连接完成后,进行功能测试,确保能够正常工作。
四、使用方法1.开机和关机操作:按下背部的电源开关按钮,即可启动或关闭。
2.操作模式选择:支持多种模式选择,通过面板上的模式选择按钮进行切换。
3.移动控制:使用遥控器或者智能方式APP,控制的运动方向和速度。
4.使用注意事项:在使用蛇形的过程中,需要注意周围环境,避免碰撞或损坏。
五、常见问题解答Q: 无法启动怎么办?A: 请检查的电源是否连接正常,是否有足够的电量。
Q: 移动困难怎么办?A: 请检查的连接是否牢固,模块之间是否有松动。
Q: 无法避开障碍物怎么办?A: 请检查的传感器是否正常工作,是否有物体遮挡传感器。
六、维护与保养1.定期清洁的外表面和连接器,保持的正常运行。
2.在使用中发现故障或异常情况时,及时联系售后服务中心进行维修。
附件:本文档无附件。
法律名词及注释:1.模块化设计:将产品拆分成多个相互独立的模块,使每个模块具备独立的功能和特点。
蛇形机器人

整体骨架由 ABS
PC 板 和 PVC 硬 板 组 成 , 在保证结构强度同 时减轻重量,方便 加工。
应用前景
此款蛇型机器人作为一个载具平台,通过在头部安装照明
灯,摄像头,主要从事复杂地形的探测拍摄工作。
因为采用模块化设计,可以安装其他传感器,机械装置等
进入狭小或危险环境内完成操作任务。
Thank You
蛇形机器人
山东理工大学 赵庆洋
制作背景 作品展示 结构说明 应用前景
目 录
CONTENTS
制作背景
自然界中的蛇能有多种 运动形式来适应环境的 变化。以蛇为模型而制 造的蛇形机器人,因为 很高的活动自由度能胜 任多种工作
蛇形机器人通过自由的关节
能进行三维上的运动,因此 有很高的通过能力。
随着机器人技术的进步,科 探,灾难救援,防恐防暴, 医疗,航天,军事,起居生 活等各个领域都能看到蛇形 机器人的身影。
作品展示
单个单元
前节由电机驱动主 动轮,构成单元由 两节构成,后节为 从动轮。
单个单元
主动轮由vex 393电机直接驱 动
结构说明 通过垂直和水 平向正交的关节来 拟和蛇 类生物柔软的 身体具 有两个方向的自由度, 整体形成一个 高冗余 度的结构体。
采 用 模 块 化 设 计 思
路 , 两 侧 安装 有 主 , 从动轮,保证了平 地机动性。
Spider 机器人控制器说明书
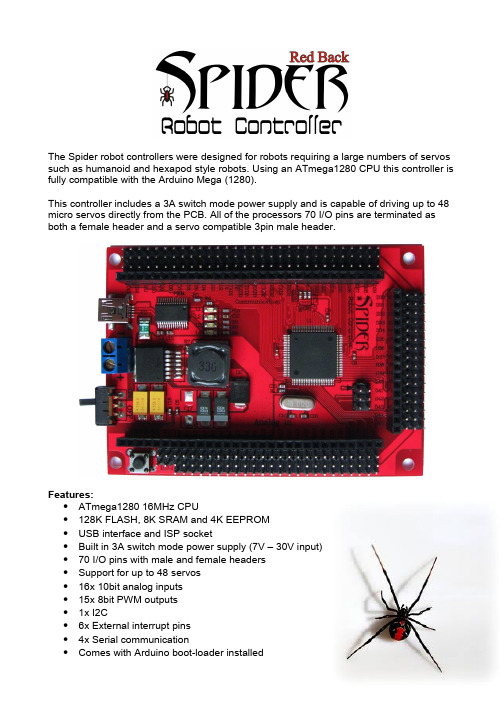
The Spider robot controllers were designed for robots requiring a large numbers of servos such as humanoid and hexapod style robots. Using an ATmega1280 CPU this controller is fully compatible with the Arduino Mega (1280).This controller includes a 3A switch mode power supply and is capable of driving up to 48 micro servos directly from the PCB. All of the processors 70 I/O pins are terminated as both a female header and a servo compatible 3pin male header.Features:•ATmega1280 16MHz CPU•128K FLASH, 8K SRAM and 4K EEPROM•USB interface and ISP socket•Built in 3A switch mode power supply (7V – 30V input)•70 I/O pins with male and female headers•Support for up to 48 servos•16x 10bit analog inputs•15x 8bit PWM outputs•1x I2C•6x External interrupt pins•4x Serial communication•Comes with Arduino boot-loader installedPin layout:Below is the board with all the pins labeled. Note that alternate functions are labeled in blue. The female header and the male pin closest to it are the signal pins. The center male pin is +5V and the pin closest to the outer edge of the PCB is ground.Programming the Spider controller:The Spider controller has been designed to be 100% compatible with the Arduino Mega and comes with the Arduino boot loader installed. The boot loader allows programs written in the Arduino IDE to be uploaded via the USB interface. More information about Arduino can be found here: /en/Guide/IntroductionThis manual assumes use of Arduino 0022 or later, which can be downloaded from here: /en/Main/Software.A full list of commands can be found here: /en/Reference/HomePage Communications:The Spider controller has 4x serial ports and 1x I²C interface. Serial interface 0 is used by the USB interface. Serial ports 1,2 and 3 are available for use with devices such as serial interface LCD’s,Xbee,Blue Tooth and WiFi modules or even other processors. Instructions on how to use these serial interfaces can be found here:/en/Reference/SerialThe I²C interface (SDA pin 20, SCL pin 21) allows the controller to communicate with devices such as external memory, real time clock (RTC), DC motor controllers and more. For the I²C interface to function properly 10K pullup resistors have been included. Some devices will include these resistors as well. Instructions on how to use the I²C interface can be found here:/en/Reference/WireDigital I/O pins:All 70 of the Spiders I/O pins can be used for simple digital inputs or outputs. By default, all pins except digital pin 13 have their mode set to input. When a pin is in input mode it is in a high impedance state (effectively open circuit). Digital pin 13 is set to output by the boot loader and has an LED attached. Although D13 can be used as an input the LED may interfere.Use the pinMode() command to change a pins mode between input and output. Use digitalRead() and digitalWrite() commands to read and write to these pins. Note: Analog pins A0 – A9 are digital pins D54 – D63.Writing a “1” to a digital pin while it is configured as an output will connect that pin to Vcc(+5V). Writing a “0” to a digital pin while it is configured as an output will connect that pin to ground (0V). Each pin is capable of sinking or sourcing up to 40mA maximum but care must be taken to limit the total current to 200mA. If you wish to drive large numbers of LEDs or other devices then the output pins should be buffered.Writing a “1” to a digital pin while it is set as an input will enable that pins internal pullup resistor. When enabled, an internal 20K resistor is connected between that pin and Vcc (+5V). Writing a “0” to that pin while configured as an input will disable the pullup resistor.Analog pins:Pins A0 to A15 are by default analog inputs. Each analog input has 10bit resolution and can measure the voltage on its pin. Input voltage should not exceed the analog reference voltage (default value is +5V).The input voltage is measured using the analogRead() command. The reference voltage is Vcc(+5V) by default. The reference voltage can be changed using the analogReference() command.PWM outputs:The Spider controller is capable of generating8bit resolution pulse width modulated outputs on digital pins D2 – D13 and D44 – D45. The output of a PWM pin is driven high and then low repeatedly with the duty cycle being adjusted to synthesize an analog output. By adding a simple RC filter to a PWM output a true analog output can be generated.PWM outputs are generated using the analogWrite() command. As the internal timers of the processor are used to generate these outputs they may be disabled by other commands using the same timer. Pin assignments should be planned to avoid conflicts.External interrupts:The Spider has 6 interrupt pins. Interrupts allow functions to be called only when an external event occurs. These pins are useful for monitoring devices such as encoders. The interrupts and their pins are:Interrupt 0 – D2Interrupt 1 – D1Interrupt 2 – D21Interrupt 3 – D20Interrupt 4 – D19Interrupt 5 – D18More information on the interrupt library can be found here:/en/Reference/InterruptsUsing the EEPROM memory:The Spider’s Atmega1280 includes 4K of EEPROM memory that can be used to store information while the power is off. More information on using the EEPROM library can be found here: /en/Reference/EEPROMUsing servos:All 70 I/O pins have a servo compatible 3 pin male header. The pin closest to the outer edge of the PCB is ground, the center pin is +5V and the inner most pin is the signal. This pin arrangement is also useful for powering sensors.Most miniature and standard servos require between 4.8V and 6V and will work happily directly from the PCB. High-powered servos requiring 6V or more should be powered via an external power source or directly from the battery.The Spider can drive up to 48 servos simultaneously using the Servo library:/en/Reference/ServoThe Servo command uses a timer for each 12 servos used starting with Timer 5. As these timers are also used for commands like PWM you need to plan your pin assignments to avoid conflicts.1 to 12 servos use timer 5 disabling PWM on pins 44,45 and 46.13 to 24 servos use timers 1&5 disabling PWM on pins 11,12,44,45 and 46.25 to 36 servos use timers 1,4&5 disabling PWM on pins 6,7,8,11,12,44,45 and 46.37 to 48 servos use timers 1,3,4&5 disabling PWM on pins 2,3,5,6,7,8,11,12,44,45 and 46. Servos can be assigned to any digital pin from D0 - D53.Analog pins A0 - A9 (D54 – D63) can also be used if required.A short tutorial including sample code for driving 48 servos can be found here:/node/25923Shields:The female headers on the Spider controller are spaced sothat a shield can be easily made from standard prototypePCB. Shields allow you add custom circuitry to your controller.A simple shield for powering servos directly from a battery orexternal power supply is now available.Alternative programming methods:Experienced users may choose to use WinAVR or AVR studioto program their controller directly via the ISP socket. Thebootloader can be removed which will fee up an additional 4Kof memory.WinAVR:/AVR Studio 5:/microsite/avr_studio_5/。
哈工大仿生机器人之机器蛇

3)德国GMD国家实验室的AiS
德国GMD国家实验室也开发 出了基于模块式结构和CAN总线 的蛇形机器人,其结构为三维关 节,每关节有三个电机及六个力 矩传感器,六个红外传感器,因 此结构相当复杂,直径达20cm左 右。其控制方式为上位机 总 线 下位机。目前该机器人具 有速度及位置闭环,能翻越简单 障碍,具有一定的自主反应能力。
14
第四种方式是侧向移动,从头部开始,身体部分 顺次接地、抬起,完成前进运动,借助腹部与地面之 间的摩擦力移动。这种运动形式常见于沙地环境中的 蛇类运动。 另外,蛇的其他运动形式有:跳跃、绕身体脊椎 的回转、利用障碍物推动身体运动、蠕虫运动、滑行 冲击等。
15
三、蛇形机器人结构形式
蛇体结构一
每组传动装置包括:1台直流伺服电机,1组一级齿轮减速,1组 丝杠螺母传动,以及1个球形连接关节。底部有1个滑动轴承作为轮 子以减少摩擦。在各单元节之间的附加球型关节使得仿蛇机器人在 地表的明显不规则运动得到一定补偿。在大多数运动模式下,每个 铰链的运动或每个单元节的垂直方向自由度,并非由机器人控制器 控制,而是由地表的几何形态进行被动的控制。仿蛇机器人的所有 单元节以同样地方式进行设计。 16
(3)地面特征识别技术的研究
识别平坦的硬地面、软土、沙地
关节模块
传感器
压杆 底面
传感装置
传感装置安装示意图
(4)基于GPS的蛇形机器人定位方法的研究
对于用于野外工作的蛇形机器人,定位是个关键
问题。基于GPS的定位方法是目前应用最广的方法。 目前实验定位精度< 15米 我们在探索应用我国的北斗导航定位系统进行定 位的方案。
13
第三种方式是伸缩运动,蛇身前部抬起,尽力前 伸,接触到支持的物体时,蛇身后部即跟着缩向前去 ,然后再抬起身体前部向前伸,得到支持物,后部再 缩向前去,这样交替伸缩,蛇就能不断地向前爬行。 在地面爬行比较缓慢的蛇,如铅色水蛇等,在受到惊 动时,蛇身会很快地连续伸缩,加快爬行的速度,给 人以跳跃的感觉。
施罗德爬行机器人S200中文说明书
11)防水等级:IP54
手动(电动)收线车(电动收线选配型)
1)线缆测量:电子计米,距离可直接显示在监视器屏幕上;精确定位,测量最小距离精度可达±。
2)线缆长度:线缆直径7.9mm,标准配置120米,可根据用户要求配置长度;
线缆防水、防油、耐磨、耐腐蚀。
3)驱动:电动或手动收、放线。
危险警告符号:表示一些存在危险情况的环境,如果不能避免,将导致死亡和严重的伤害事故。
警告符号:表示危险的境况,如果不能避免,也可能导致死亡或严重的伤害事故。
小心符号:表示危险的境况,如果不能避免,可能导致轻微或中等程度伤害事故。
注意符号:表示和保护财产相关的安全信息,该符号意味着使用者在使用该工具前必须仔细阅读操作手册,因为操作手册里介绍了重要的安全注意事项和正确的使用方法。
2、产品用途
CCTV管道检测爬行系统主要用于市政排水管道内部快速检测和诊断。该设备配备强力照明光源和便携式控制系统,适合野外和移动工作场所。传输线缆可以根据用户需求配备,目前最长支持500米(光纤通信线缆),可将设备送至所需工作位置。爬行车部件采用防水设计可至水下检测(正压状态下),但实际操作根据水下环境而定。
安全气压检测系统:
自动检测车体、摄像系统、升降系统内部气体压力,并实时向后端设备传送数据、并能自动判断和处理异常,确保设备及工作环境的安全(下井前需充入大约10~14PIS干燥气体)。
4、主要技术参数
爬行系统:9902FA
1)适用于150mm(最小轮)以上的管道检测,配置大小轮胎及电动升降台。
2)爬行器工作电压48V,最大输出功率180W。
用户使用发电机供电时,请严格按照发电机的操作规程执行,并且能够适用本公司自带的稳压适配器!
Razer Basilisk V3 Pro 使用手册说明书
進階指南王者回歸,勢如破竹。
認識最先進的遊戲滑鼠:。
這款滑鼠採用領先業界的技術,提供極限的效能、自訂功能、連接和控制能力,釋放你的最大潛力。
目录1. 內含 (3)2. 使用要求 (4)3. 註冊即可享有保固 (5)4. 技術規格 (6)5. 設定你的 RAZER BASILISK V3 PRO (7)6. 使用你的 RAZER BASILISK V3 PRO (11)7. 透過 RAZER SYNAPSE 設定 RAZER BASILISK V3 PRO (13)8. 安全與保養 (31)9. 法律條文 (33)1. 內含▪Razer Basilisk V3 Pro滑鼠左鍵滑鼠右鍵Razer™ HyperScroll 傾斜滾輪滾輪模式切換鍵▪自由捲動模式▪分段捲動模式DPI 循環切換按鈕*多功能發射鍵滑鼠按鍵 5滑鼠按鍵 4USB Type C 連接埠超滑順滑鼠腳滑桿開關▪藍牙模式▪電源關閉模式▪Razer™ HyperSpeed Wireless(2.4 GHz) 模式Razer Focus Pro 30K DPI 光學感測器設定檔指示燈設定檔切換鍵無線 USB 傳輸器收納槽 / 蓋板***DPI 分段如下:400、800、1600(預設)、3200 及 6400;可使用 Razer Synapse 自訂。
**可替換為 Razer 無線充電接收器,以透過 Razer 滑鼠底座專業版進行無線充電(皆需另外購買)。
▪USB 傳輸轉接器 + 無線 USB 傳輸器▪USB Type A 轉 USB Type C Speedflex 纜線▪重要產品資訊指南2. 使用要求產品需求▪USB Type A 連接埠或藍牙連線功能RAZER SYNAPSE 需求▪Windows® 10 64 位元(或更新版本)▪網際網路連線(供下載安裝軟體)3. 註冊即可享有保固註冊產品以獲得獨家優惠產品序號標示於此處。
仿生蛇说明书
目录一、简介..........................................................................................................错误!未定义书签。
二、设计初衷 (2)三、创新点分析................................................................................................错误!未定义书签。
四、方案设计....................................................................................................错误!未定义书签。
1、构件图: (4)2、主要元件的图片、功能表: (4)3、实现过程: (6)五、结构设计 (6)1、底盘机构: (6)2、升降机构 (7)3、生命探测系统 (7)4、整体结构 (7)六、程序设计 (8)1、总程序概览 (8)2、避障 (9)3、搜救 (10)七、实用可行性 (10)八、成本分析 (11)九、应用前景 (11)一、简介图一作品整体图本蛇形机器人的存在作用是用于在地震等灾害后,进入狭小空间搜寻幸存者。
本机器人使用履带驱动,携带生命检测装置,定位装置,遥控装置以及双重避障系统。
本机器人较为小的体型以及多节化的设计,可以让机器人进入许多常规机器人难以进入的环境,头部带有的举升装置可以有效提高机器人的通过性能。
生命检查装置发现幸存者后会发送定位信号给搜救人员。
自带的气囊及螺旋桨则可以保证机器人在遇到深水区无法通行时也能顺利通过。
具体操作为救援人员可以通过遥控来控制机器人进入狭小空间搜救,在遇到障碍物时,较小的可以通过举升装置来通过,生命检查装置发现幸存者后会自动上传定位信号,当遥控信号遇到干扰时,系统会开启自动避障功能,继续进行搜救任务。
2.2、蛇形机器人结构简介

蛇可以做多种动作来适应它所处的环 但大体上可分为四种步态: 境,但大体上可分为四种步态: • 蜿蜒运动 • 直线运动 • 伸缩运动 • 侧向运动
蜿蜒运动
生物蛇的蜿蜒运动
直线运动
生物蛇的直线运动
伸缩运动
生物蛇的伸缩运动 生物蛇的伸缩运动 伸缩
侧向运动
生物蛇的侧向运动
∆ θ i ( yaw )
处理单元 微处理器
GPS进行定位的原理图 GPS进行定位的原理图
(6)应用研究
监控站
操作台 作业单元
传 感 器
蛇形机器人
监视器
蛇形机器人作业系统框图
应用 结合国家反恐防暴的需求
车底探查实验
关键技术- 关键技术-挑战性研究 方向
• 理论方法问题,仿生静态与动态模型,复杂模型计算方法,基于 理论方法问题,仿生静态与动态模型,复杂模型计算方法, 传感器变结构方法,往往是非线性、非定常问题, 传感器变结构方法,往往是非线性、非定常问题,…… 多自由度灵巧机构,运动学与动力学,冗余与柔性, 多自由度灵巧机构,运动学与动力学,冗余与柔性,高效驱动装 置,…… 感知与模式识别技术,内部姿态,外部环境,距离、力觉、 感知与模式识别技术,内部姿态,外部环境,距离、力觉、触觉 特别是视觉问题, 等,特别是视觉问题,…… 嵌入式控制技术:微小型硬件平台,高可靠性软件系统, 嵌入式控制技术:微小型硬件平台,高可靠性软件系统,高性能 实时学习技术,基于传感器的群体行为智能控制技术, 实时学习技术,基于传感器的群体行为智能控制技术,…… 人机交互技术,通讯,时延,临境与虚拟现实, 人机交互技术,通讯,时延,临境与虚拟现实,…… 微小型机电系统设计、加工、装配, 微小型机电系统设计、加工、装配,…… 微、仿、多、遥、网
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
UP-SolidSnake 蛇形机器人 教学实验系统 使用说明书北京博创科技 2005 年 12 月前言本说明书以仿生机器蛇为背景,从项目开发的角度,来讲述机器蛇项目设 计过程中所涉及的技术知识, 更重要的是通过介绍机器蛇的各种设计过程,讲述 典型机电一体化项目开发的有关知识。
我们给机器蛇起了一个有趣的名字 Solid Snake(刚体蛇) ,即是以机械结 构等刚体构建柔性的机器蛇。
本机器蛇说明书,希望能够达到以下几点目的: 通 过 机 器 蛇 介 绍 , 大 家 能 够 对 SolidSnake 有 个 总 体 了 解 , 并 清 楚 SolidSnake 的结构设计、运动研究、控制系统等方面的内容。
通过机器蛇使用说明,大家能够组装制作机器蛇,并能够操纵机器蛇完成 一定形式的运动,另外,能够通过预留的接口,自己编程控制机器蛇。
目录 §1 机器蛇介绍研究概况; 结构设计; 运动研究; 控制系统设计§1.1 §1.2 §1.3 §1.4§2机器蛇使用说明§2.1 装配说明; §2.2 控制机器蛇运动; §2.3 编程控制机器蛇;§1机器蛇介绍;仿生机器人的研究是目前机器人领域里比较活跃的一个方向, 目前已有各种 各样的仿生机器人面世,像机械昆虫、机器鸟、机器鱼、机械蟹等等……。
生物 界中蛇是一种极为特殊的生物,它的运动形式非常的特别。
蛇没有脚,他怎么就 能向前“走”了呢?这个看似简单的问题,从古代便吸引了众多人的注意。
亚里士 多德就曾经在他关于动物运动的文章中讨论过蛇向前运动的原因。
但直到 20 世 纪中期以前,许多人的理论都很偏驳,他们认为蛇是靠他们的“脚”(鳞片)来向 前运动的。
近 20 年来。
随着机器人学兴起, 特别是仿生机器人的活跃, 蛇运动的研究, 机器蛇的研制,已成为仿生领域的研究热点。
蛇形机器人在战场上的扫雷,爆破, 矿井和废墟中探测营救, 管道维修以及外行星地表探测等条件恶劣,且要求有高 可靠性的领域有着广阔的应用前景。
另外,研究仿生机器人,特别是蛇形机器人的本身会有很大的乐趣,当你看 到刚体的金属或者塑料结构在控制下变得有柔顺而富有生命时, 那种喜悦是难以 言表的。
我们充分考虑了蛇类生物的运动特点,从仿生学的角度,结合机器人动力学 和摩擦学等的相关理论, 建立了蛇的行波运动学模型,并研制了自己的机器蛇样 机——SolidSnake,并利用 SolidSnake 实现了蛇的蠕动、游动、侧移、侧 滚、抬头、翻越障碍物等运动形式。
SolidSnake 利用垂直和水平方向正交的关节来拟和蛇类生物柔软的身体, 每两个正交的关节组成一个单元体,每个单元体相当于一个万向节,具有两个方 向的自由度, 整体形成一个高冗余度的结构体。
这样的机构设计使蛇体具有向任 何方向弯曲的能力。
在电路设计上采用“分布式底层运动控制——高层中枢决策”的控制逻辑, 通过 RS232 总线通讯。
上位机为 PC 机控制,PC 机可以控制主机,调用运动 模式库,实现对 solid snake- II 的高层控制;也可直接控制 solid snake 的各 个关节,实时的改变任意关节的状态,实现底层控制。
SolidSnake SOLID SNAKE 的主要技术参数: 参数 单元体长度 全长 直径 净重 值 110mm 0.98m 50mm 1kg最大速度 平均功耗 8-10m/min 25W§1.1 近代国内外研究概况;日本的 Shigeo Hirose 在 1972 年的时候研制了 ACM,算是比较早的 一仿生学的角度研究机器蛇的。
近年, 一个有兴趣的博士生对 ACMIII 进行 了改进研究,实现了效果非常好的运 动。
图 日本的 ACMIII 美国宇航局 (NASA) NASA 于 1999 年开始研究多关节的蛇形机器 人,计划在其太空计划中用于行星地 表探测以及空间站维护工作。
其第一 代蛇形机器人如图所示。
它采用相邻 正交的串联机构,由中央计算机集中 控制。
该机器人能完成蠕动前进,游 动前进,翻越简单障碍物等功能。
该 蛇形机器人结构简单合理,对目前的 蛇形机器人结构产生了很大的影响。
NASA 的蛇形机器人如图所示:图 2 蛇形机器人 S5 德国 GMD 国家实验室也开发出 了基于模块式结构和 CAN 总线的蛇形 机器人,其结构为三维关节,每关节 有三个电机及六个力矩传感器,六个 红外传感器,因此结构相当复杂,直 径达 20cm 左右。
其控制方式为上位 机è总线è下位机。
目前该机器 人具有速度及位置闭环,能翻越简单 障碍,具有一定的自主反应能力。
图 1 NASA Snakebot I 德国人 Gavin.H 从约 1997 年开 始从事蛇形机器人的研究工作,到目 前 为 止 共 设 计 并 制 作 了 S1,S2,S3,S4,S5 五代蛇形机器人, 图 2 为 S5。
其研究已经达到相当高的 水平,特点是:各个关节形状尺寸不 同,高度模拟生物蛇;为二维结构, 无法完成三维空间运动;依靠从动轮 而不是摩擦运动,运动速度很高,主 要运动方式为游动。
图 3 GMD AiS 国防科大 RoboSnake,这是国 内最早报道的蛇形机器人,最初为二 维结构,依靠从动轮前进,长约 1.5 米,重约 3Kg。
如图 4 所示:图 4 国防科技大学 roboSnake 同时,中科院沈阳自动化所蛇形 机器人也开展了机器蛇的研究。
§1.2 结构设计机器蛇设计有三维结构与二维结构之分,采用三维结构虽然会使某些自由 度在运动过程之中显得冗余, 但是为了适应地形的变化,充分体现生物蛇的运动 特点,采用三维设计是势在必行的。
为了减小机器蛇的着地面阻力,机器蛇至少一个面应该是平整的,生物蛇 也具有这样的特点。
另外,为了采用尽可能少的零件,我们将壳体设计成了一个 四方体,在各个平面上特性完全相同。
机器蛇采用舵机为动力源,所以设计舵机 的安装方式也是一个重要的方面。
机器蛇是一个重复性的机构,是多个相同的关 节的装配体。
壳体设计图如下:舵机尺寸如下: s9151 尺 寸 :40.0×20.0×36.6 mm s3003 尺寸:40.4*19.8*36mm舵机安装方式连接方式设计:为了减小机器蛇前进方向的摩擦力(有利) ,而加大躯干纵向的摩擦力(有害) , 我们计划采用从动轮机构, 由于考虑到从动轮方案的不确定性,即从动轮可能不 可行,我们计划将从动轮机构与壳体分开设计。
从动轮机构设计如下:总装配示意图:SolidSnake 利用垂直和水平方向正交的关节来拟和蛇类生物柔软的身 体,每两个正交的关节组成一个单元体,每个单元体相当于一个万向节,具有两 个方向的自由度, 整体形成一个高冗余度的结构体。
这样的机构设计使蛇体具有 向任何方向弯曲的能力。
实物照片如下:SolidSnake 采用模块化设计,每个关节均可很容易进行拆卸,用户可以 根据不同的需要增减单元体的数量。
教学演示用的 SolidSnake 蛇形机器人为 方便讲解, 关节数量设为 6 节。
SolidSnake 具体指标: 关节节的长度 110mm, 单元体长度为 220mm, 蛇体的总长度是 220*6=1320mm。
由于舵机自身的约束条件限制,每个舵机 的转角范围限制在-90~+90 度。
为了减少机器蛇的运动中的摩擦阻力,在机 器蛇两侧安装有从动轮, 实现了蛇体的平稳游动。
采用轻型耐磨塑料制造蛇形机 器人的主要结构,在很大程度上减轻了蛇体的重量。
总结: 机器蛇的设计达到了机器蛇的功能要求,具备模块化,装配方便的特点。
§2.2 运动研究一、蛇如何运动 蛇没有脚,怎么能爬行呢?实际 上,蛇不仅能爬行,还爬行得相当快。
蛇之所以能爬行, 是由于它有特殊 的运动方式: (1) 、婉蜒运动 所有的蛇都能以这种方式向前爬 行。
爬行时,蛇体在地面上作水平波 状弯曲,使弯曲处的后边施力于粗糙 的地面上,由地面的反作用力推动蛇 体前进,如果把蛇放在平滑的玻璃板 上,那它就寸步难行,无法以这种方 式爬行了,当然,不必因此为蛇担忧, 因为在自然界是不会有像玻璃那样光 滑的地面的。
(3) 、螺旋式滑动 比较适用于比较软的地质,如沙 子。
角蝰最大速度可达到 3km/h,约 80 厘米每秒。
如图:(4) 、蠕动 在竖直平面的波动, 优点是效率较 高,且与地面的相对滑动较小,但存 在稳定性问题。
(2) 、直线式蠕动 利用脊柱从头传到尾的间歇收缩, 毒蛇能够笔直的前行,如同蚯蚓一样。
速度可达几 cm/s.它是身躯比较庞大 的蛇在非紧急情况下,在比较平的地 面上行进的较佳形式。
(5),横波运动 大多数蛇利用这种运动方式, 身体 的每一部分都非常成功的经过地面上 的同一点,没有静止的接触。
肌肉的收 缩 与伸长形成 的波从头传递到尾 部。
比较适用于凸凹不平的地面。
一 条曼巴(非洲一种树蛇)在 43 米的距 离内的最大速度是 11km/h。
(6) 、眼镜蛇式运动 在水平平面的波动和伸缩运动的 合成,效率很高,但是与地面的相对 滑动也很大。
在人们的印象里,蛇似乎是爬得很快的,所以有“蜈蚣百足,行不如蛇”的说 法。
其实大多数种类的蛇,每小时只能爬行 8 里路(4km/h)左右,和人步行 的速度差不多。
但也有爬行较快的,身体细长的花条蛇,每小时能爬行 10~15 公里,而爬行最快的恐怕要算非洲一种叫做曼巴的毒蛇了,每小时可爬行 15~ 24 公里,可是它们只能在短时间内爬得这样快,不能长时间以这种速度爬行。
因此,即使遇到会追人的毒蛇,人也是来得及避开的。
人们之所以有蛇跑得很快 的印象, 那是由于一刹那间蛇的爬行速度确实是比较快的缘故,尤其是蛇受惊逃 走的那一瞬间。
二、蛇运动的波动学解释及机器蛇实现 通过对蛇的运动方式的分析可见:无论哪一种运动方式,蛇的运动都可以看成是 一列行波的传递。
l YZ 平面沿 Z 方向-竖直平面波,实现蠕动等运动方式; l XZ 平面沿 Z 方向-水平平面波,产生蜿蜒运动等运动方式; l YZ、XZ 平面沿 Z 方向—复合空间波,产生螺旋侧移等复杂运动方式; 鉴于机器蛇实现的便利性,我们选择了蠕动的运动方式,假设是一类正/余弦波 的传递, 那怎么利用机器蛇来实现这一运动形式呢?换句话说,怎样用多杆系的 结构体来拟和一列波呢?考虑简单的运动模式-蠕动l X(z)=0 Y(z)=A Sin[2Л×(χ/λ+t/T)+ψ]假定机器蛇的关节沿生成的轨迹运动,则可用“截圆法”求取各个关节点。