第二章 短基线水声定位系统(SBL).
超短基线水声定位系统

令
则
r(t) Ar cost Br sint 解得
Br tan
Ar
rt Ar2 Br2 cos
r1 r1 Ar cos 1 Br sin 1 r2 r 2 Ar cos 2 Br sin 2
Ar
r2 sin 1 r1 sin
sin1 2
2
r3 r 3 Ar cos 3 Br sin 3
cost t0 ,
t -t0 T
0,
其它
23
3.5 改善超短基线定位系统定位精度的措施
采用宽带信号提高定位精度
Rout t
A
t
2T
t
0
s
in
t
t0 1
t
t0 T
cost t0 ,
ቤተ መጻሕፍቲ ባይዱ
t -t0 T
接收的时延0, 值t0:为最大值出现的X时a 刻 R。cosm其x它
Rc mx
d
“跳象限”的情况主要由水面反射引起,可通过信号处 理的方法解决。
以前采用单频信号时,对信号处理的手段未进行较深入地研究, 存在此种问题。
现在采用宽带信号,信号处理的手段也较高,“跳象限”的问
题可以解决。
16
3.5 改善超短基线定位系统
定位精度的措施
分析
不考虑声速和阵元间距误差的情况下
X a
当 接近 90°(即信标或应答器在基阵的下方)时,相位差很小,前3
项影响很小,相位测量误差起主要作用。
随θmx ,θ my 减小,前3项影响加大 当信标或应答器在靠近基阵所在平面
(即角度很小)时2,d因c有o反s射m声影
响,精度也难保证。
结论: 超短基线系统只在基阵下方一个有限的锥体内定位精度较高
水声技术在海洋工程中的应用研究
水声技术在海洋工程中的应用研究海洋,占据着地球表面约 71%的面积,蕴藏着丰富的资源和无尽的奥秘。
在人类探索海洋、开发海洋资源以及进行海洋科学研究的进程中,水声技术发挥着至关重要的作用。
水声技术作为一门交叉学科,融合了声学、电子学、信号处理、计算机科学等多个领域的知识,为海洋工程提供了强大的技术支持。
水声技术在海洋工程中的应用广泛,其中之一便是海洋资源勘探。
在石油和天然气勘探领域,水声技术能够帮助我们探测海底的地质结构和油气藏的分布。
通过发射和接收声波,我们可以获取海底地层的反射和折射信息,从而推断出地层的性质和构造。
例如,利用地震波勘探技术,向海底发射一系列的声波脉冲,然后接收反射回来的声波,经过复杂的信号处理和数据分析,地质学家能够绘制出海底的地质剖面图,确定潜在的油气储层位置。
此外,在矿产资源勘探方面,水声技术也能发挥作用。
对于深海中的多金属结核、硫化物矿床等,声波可以探测其分布范围和储量,为矿产开采提供前期的基础数据。
海洋通信是水声技术的另一个重要应用领域。
在广阔的海洋中,由于电磁波在海水中的衰减很快,因此传统的无线通信方式在水下受到很大的限制。
而声波在海水中能够传播较远的距离,使得水声通信成为水下信息传输的主要手段。
在海洋科学研究中,水声通信可以实现潜水器、浮标、传感器等设备之间的数据传输,让科学家能够实时获取海洋环境的各种参数。
在军事领域,潜艇之间、潜艇与水面舰艇之间的通信也依赖于水声技术。
通过先进的编码和调制技术,提高水声通信的速率和可靠性,实现语音、图像和数据的准确传输。
同时,为了保障通信的安全性,水声通信还需要采用加密技术,防止信息被窃取和干扰。
在海洋工程的建设中,水声技术同样不可或缺。
例如,在海洋平台的建设过程中,需要对海底地形进行精确测量,以确定平台的位置和基础的设计。
水声测深技术能够快速、准确地获取大面积的海底地形数据,为平台的建设提供可靠的依据。
此外,在海底管道和电缆的铺设中,水声定位技术可以实时监测铺设设备的位置和姿态,确保管道和电缆的铺设精度和质量。
水下声基阵信号处理

水声定位技术与发展趋势综述1 引言地球表面积的71%是海洋,海洋里蕴藏着丰富的生物和矿物质资源,是人类今后生存和发展的第二个空间。
而水下探测设备则是人类开发海洋的重要帮手,更是海军和民用航海事业不可缺少的组成部分。
水声定位系统由水下声标、船上的声学接收、发射设备组成的定位系统,是水下探测设备的重要组成部分,研究水声定位技术意义重大。
2 水声定位技术迄今为止,水下目标定位跟踪的主要手段仍是依赖于几何原理的水声学定位方法。
通常用声基线的距离或激发的声学单元的距离来对声学定位系统进行分类。
水声定位系统,根据所实施的原理和测量手段不同,又可分为“方位--方位”、“方位--距离”和“距离--距离”三种测量系统。
大部分的长基线、短基线系统都属于后者。
距离测量水声定位系统是通过测量水下声源所辐射的声信号从发射到接收所经历的时间及声速来确定声源到各接收点的距离,从而实现对目标进行定位的。
根据接收基阵的基线可以将水声定位技术分为三类:长基线(LongBase-Line)、短基线(Short Base-Line)、超短基线(Ultra Short Base-Line),另外还有一种组合定位系统,下面作详细介绍。
2.1超短基线定位系统(SSBL/USBL)超短基线定位系统(SSBL/USBL)的声基阵由集中安装在一个收发器中的所有声单元 (t>3)组成。
声单元之间的相互位置精确测定,组成声基阵坐标系,声基阵坐标系与船的坐标系之间的关系要在安装时精确测定。
包括位置和姿态(声基阵的安装偏差角度:横摇、纵摇和水平旋转)。
系统通过测定声单元的相位差来确定换能器到目标的方位(垂直和水平角度)。
换能器与目标的距离通过测定声波传播的时间,再用声速剖面修正波束线确定距离。
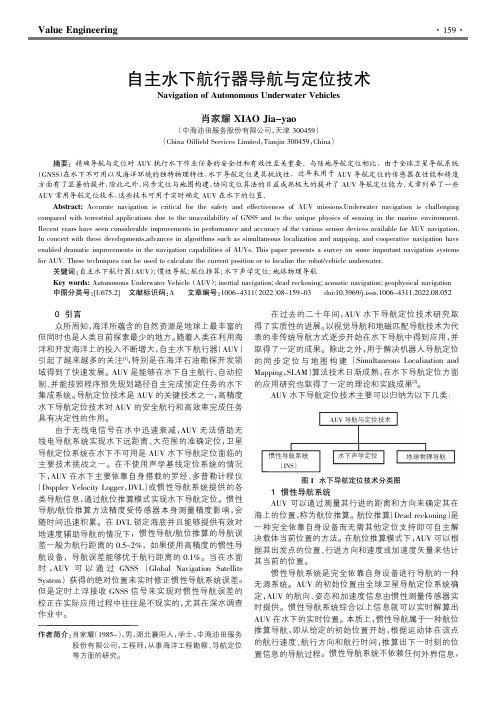
超短基线定位系统的示意图见图1。
图1 超短基线定位不意图超短基线定位系统的优点是整个系统的构成简单,操作方便,不需要组建水下基线阵,测距精度高。
超短基线定位系统的缺点是需要做大量的校准工作。
水声定位

各个水听器测的与目标的斜距为:
长基线水声定位系统
目标与原点的斜距为:
将式中
展开得:
从而得到:
ri
消去
r
可得方程:
用矩阵可写作:
其中,
但矩阵A奇异,因此方程有多个解,得不到唯一解。考虑再增加一个水听器, 并测得它与目标的斜距 r4,可得另一个方程:
消去
r 得:
用上式代替矩阵方程第三行,则矩阵A非奇异,方程组可得到唯一解。 但当水听器都位于同一水平面,且 仍然是奇异矩阵,可用三个水听器得测量值以及 已知时 ,矩阵A 联立,得方程组:
在海底布设由T1,T2,T3组成的水听 器接收基阵,在直角坐标系坐标分别为
T1 (x1, y1,z1), T2 (x 2 , y2 ,z2 ), T3 (x3 , y3 ,z3 ) ,水听器位置
校准后,则假定坐标为已知量。 各个水听器到原点的距离为:
di xi 2 yi2 zi2 (i 1, 2,3)
短基线水声定位
系统组成: 1) 被定位的船或潜器上至少有3个水听器。 2) 间距在5~20米的量级。 3) 水面船上面装有问答机 4) 一个同步信标(或应答器)置于海底 工作原理 问答机接收来自信标(或应答器)发出的信号, 根据信号到达各基元的时间,求得斜距,据此可计算 水面船相对于信标(或应答器)的位置。
超短基线定位系统的基阵长度一般在几厘米到几十厘米,与前两种不同,利
用各个基元接收信号间的相位差来解算目标的方位和距离。 若按照工作方式划分,以上三种定位系统都可以选择使用同步信标或应
答器工作方式。
询问器或问答机:是安装在船上的发射器和接收器。它以一个频率发出询 问信号,并以另一频率接收回答信号。接收频率可以多个,对应于多个应 答器,常常只相隔0.5kHz。发射和接收换能器是无指向性的。 应答器:是置于海底或装在载体上的发射/接收器。它接收问答机的询问信 号(或指令),发回另一与接收频率不同的回答信号。收发换能器无指向 性的。 声信标:置于海底或装在水下载体(潜器)上的发射器,它以特定频率不 停的发出声脉冲。它是自主工作的。声信标分同步式和非同步式两种。 响应器:置于海底或装在水下载体(潜器)上的发射器,它由外部硬件 (如控制线)的控制信号触发,发出询问信号。问答机或其它水听器接收 它的信号。它常用于噪声较强的场合。
短基线定位算法的设计与实现
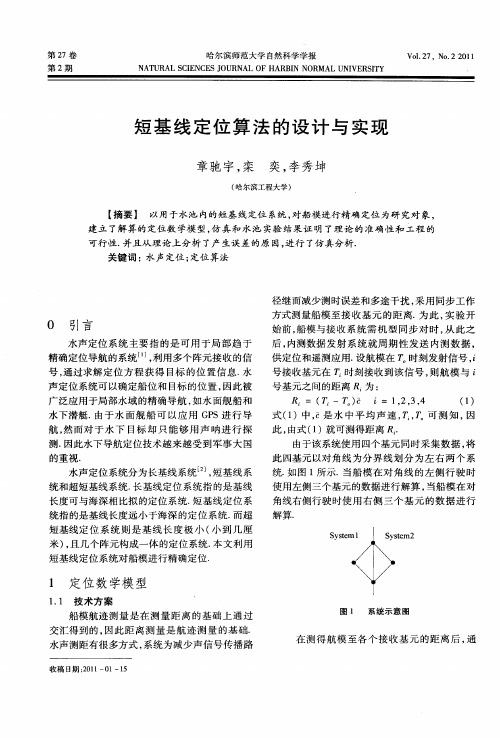
图 4 左 右 系统 分 别解 算 结 果
2 误 差分 析
[ 一 ) +( ( Y—Y) +( ) 丁 =c z一 ] 1 t
() 3
-
2 0
-0 1
0
1 0
2 0
sm /
对 定位 方程 ( )进行 求 导得 3
使 用此 双 系统 可 以 明显减 少 交 汇误 差. 由于 基元 采 集 的时 间参 数存 在 误差 , 以用 于 解算 的 所
船模 到 三基 元 的 距 离 参 量 ( =c) ,:R 存 R tR。R , , 在误 差 . 船在 右 半 面 运 动 , 用 左 系 统 解 算 的 若 而 话, 误差 会 比右 半 面 系 统计 算 误 差 大 . 图 5所 如
() 1 测得 , 则可得到如下定位方程 :
( 一 ) X + ( Y—Y) +( —z) =R z o
=
12, 。 3
() 2
式 中 , , 基 元位 置 , 由基 阵 标校 测得 , Y是 已 足 已由( )得 到 , 1 z 基 元 和 池 底 的距 离 , 常 。为 为 量 , 程 中只有 , , 方 y z是 未 知 量. 程 组 ( )共 方 2 有 三个 方程 , 三个 未 知 量 , 其 进 行 解算 即 可得 对 出唯一 解.
关键 词 :水 声定位 ; 定位 算 法
径 继 而减 少测 时误 差 和 多途 干扰 , 采用 同步 工 作 方式测 量 船模 至 接 收 基 元 的距 离. 此 , 验 开 为 实
0 引 言
水 声 定位 系统 主 要 指 的是 可 用 于 局 部 趋 于
水声定位信标及多任务检测电路设计_硕士学位论文 精品推荐

关键词:水声定位,码分多址,多任务检测,时延估计,FPGA
中北大学学位论文
The Design of Acoustic Positioning Signal and Multi-User Detection Circuit Abstract
With the increase of the scope and frequency of the human activities in the ocean, and the growing demand for ocean development, acoustic positioning technology were received more and more attention of foreign and domestic scholars. However, the
第三章 水声定位信标设计
3.1 水声信道特点 ................................................... 16 3.2 水声定位信标设计 ............................................... 18 3.2.1 水声定位信标的复用方式 .................................... 18 3.2.2 水声定位信标的编码方式 .................................... 19 3.2.3 水声定位信标的调制方式 .................................... 22 3.2.4 水声定位信标的参数选择 .................................... 25 3.3 水声定位信标逻辑电路设计 ....................................... 27 3.3.1 m 序列发生逻辑电路设计 ..................................... 27 3.3.2 正弦信号产生逻辑电路设计 .................................. 29
水下声学定位系统概述
水下声学定位系统概述概述20世纪90年代以来,世界先进国家的海洋调查技术手段逐步成熟与完善,其中超短基线(简称USBL)水下设备大地定位技术也获得了长足的发展。
高精度水下定位系统具有广泛的用途,在海洋探测研究、海洋工程、水下建筑物施工、潜水员水下作业、水下考古、海洋国防建设等方面,都离不开水下定位系统为其提供高精度、高质量的定位资料,因此高精度水下定位技术对维护国家领土权益和国民经济建设都具有重要意义。
关于水下声学定位系统20世纪50~60 年代,在国际上,随着光、声、磁等技术的不断发展,在大力开发海洋自然资源和海洋工程的进程中,水下探测技术得到了较大发展,相继开发了一系列先进的、高效能的水下探测设备:在各种水下检测的光、声、磁技术中,由于水下光波衰减很快,即使是波长最长、传播最远的红外光波在水中传播到了几米以后也衰减完了,而声波和电磁波在水中有良好的传播性,因而,声呐、磁探和超短基线成为水下检测的有效方法。
声学定位系统最初是在19世纪60年代的时候被开发出来用于支持水下调查研究。
从那时起,这类系统便在为拖体,ROV等水下目标的定位中成为了重要角色。
声学定位系统能够在有限的区域内提供非常高的位置可重复精度,甚至在远离海岸。
对大多数用户来说,可重复性精度要比绝对精度重要。
水下声学定位系统分类在声学定位系统中,有3种主要的技术:长基线定位(LBL),短基线定位(SBL),和超短基线定位(SSBL/USBL),有些现代的定位系统能组合使用以上技术。
长基线(LBL):长基线定位能在宽广的区域内提供高精度的位置,它需要至少3个应答器组成的阵列部署在海底上的已知点上,水面舰只安装一个换能器。
换能器测量出到水底应答器的斜距,从而计算出自身的坐标位置。
图1短基线(SBL):短基线定位需要在舰船上安装至少3个换能器阵,换能器之间的位置关系为已知,应答器安装在需要定位的目标上,舰船上的多个换能器测量出到同一个应答器的距离,从而计算出目标的位置。
海洋测绘技术及其发展之研究
海洋测绘技术及其发展之研究摘要:在“一带一路”、智慧城市及海岸带建设等影响下,海洋测绘技术受到更多的重视。
在发展海洋经济、海洋生态环境保护、海洋国土空间规划、海岸带生态修复等方面海洋测绘技术发挥着关键性作用。
本文结合当前发展现状阐述前沿性海洋测绘技术并对技术的发展予以展望,以期能够为未来海洋测绘技术的发展形成助力。
关键词:海洋;测绘技术;发展;海洋工程前言:在高速发展的信息化、智能化时代,云计算、互联网、大数据平台等先进技术在测绘领域不断运用。
丰富了海洋测绘的数据获取方式,提高了数据处理效率。
海洋测绘工作具有基础性、全局性和国际性等特点,现代测绘技术也逐渐向着高精度、高分辨率、高数据处理效率的方向发展。
因此,为进一步提高海洋测绘技术水平,本文阐述海洋测绘技术的同时对其发展提出合理化建议具有重要意义。
1.海洋测绘内涵海洋测绘技术包括海洋空间地理信息的测量和表达,可以采集、处理、运用海洋领域人文、几何、物理等方面的地理空间信息[1]。
作为测绘学的一项重要分支,其能够支撑着海洋科研、海洋军事等活动的开展。
2.海洋测绘技术2.1海洋大地测量技术海洋大地测量是将陆地测量向海区延伸的一项模式,保证海洋测量控制基准使其根本目的。
能够辅助建立海洋大地物理层面、几何层面、重力层面和磁力层面等的基准体系,对整体框架予以维护。
除海洋大地测量外还需建立海洋控制网,对岛礁、海岸、海底以及水体的控制网予以布设、测量。
作为大地控制网的重要组成部分,海洋大地测量是陆地平面框架向海区的延伸。
海洋垂直基准由平均海平面、陆地高程基准和深度基准面等内容构成[2]。
在潮位站所获取的潮位数据能够辅助去而定海洋垂直基准。
伴随着GNSS技术、卫星测高等技术的发展,海洋垂直基准所确定的表达方式和数据源也发生着重大变革。
2.2海洋导航定位技术定位服务是开展海洋服务的基础。
当前中国北斗卫星系统、美国CPS、俄罗斯GLONASS以及欧盟CALILEO所构成的GNSS定位系统均可提供海上的位置服务。
基于虚拟仪器的超短基线水声定位系统

基于虚拟仪器的超短基线水声定位系统虚拟仪器技术(Virtual Instrumentation,VI)是指以计算机为核心的仪器与测量系统(硬件和软件)的设计方案,该技术通过软件编程的方式,实现仪器硬件控制、信号处理、仪器测量、数据采集等多种功能集成于一个仪器系统中。
基于虚拟仪器的超短基线水声定位系统(Ultra-short baseline Acoustic Positioning System,USBL)是一种通过水声信号实现目标定位的仪器系统,具有定位精度高、实时性好和使用灵活等优点。
虚拟仪器的超短基线水声定位系统由测量设备和数据处理系统两部分组成。
测量设备包括超短基线水声测距系统、目标跟踪系统和船舶姿态传感器三部分。
超短基线水声测距系统由一个发射器和多个接收器组成,其基本原理是通过发射出的水声信号,在目标位置处被接收器接收到,并记录下信号传播的时间。
测量设备中的目标跟踪系统可以实时记录目标的位置和运动状态,船舶姿态传感器可以实时记录船舶姿态和位置信息。
数据处理系统主要由计算机和虚拟仪器软件构成。
虚拟仪器软件根据接收到的信号和目标位置信息,计算出目标与船舶的距离和方位角等实时定位数据。
这些数据可以通过计算机的显示屏或者数据接口输出给用户使用。
在数据处理过程中,虚拟仪器软件会对信号进行滤波、去噪、补偿等处理,以提高定位精度和可靠性。
虚拟仪器的超短基线水声定位系统主要应用于海洋勘探、船舶导航、海洋救援等领域。
其中,海洋勘探中的水下生物调查、环境监测和地形测量等任务需要对海底目标进行定位和跟踪。
而船舶导航和海洋救援中,则需要对周围的船只和人员进行定位和跟踪。
虚拟仪器的超短基线水声定位系统相较于传统的超短基线水声定位系统具有更高的定位精度和更好的实时性。
而且,虚拟仪器软件可以根据用户的需求进行修改和开发,使得系统更具有灵活性和可扩展性。
因此,虚拟仪器的超短基线水声定位系统有着广泛的应用前景,可以满足研究者和工程师在海洋科学、航海技术和海洋工程方面的需求。
自主水下航行器导航与定位技术
Value Engineering0引言众所周知,海洋所蕴含的自然资源是地球上最丰富的但同时也是人类目前探索最少的地方。
随着人类在利用海洋和开发海洋上的投入不断增大,自主水下航行器(AUV)引起了越来越多的关注[1],特别是在海洋石油勘探开发领域得到了快速发展。
AUV是能够在水下自主航行、自动控制、并能按照程序预先规划路径自主完成预定任务的水下集成系统。
导航定位技术是AUV的关键技术之一,高精度水下导航定位技术对AUV的安全航行和高效率完成任务具有决定性的作用。
由于无线电信号在水中迅速衰减,AUV无法借助无线电导航系统实现水下远距离、大范围的准确定位,卫星导航定位系统在水下不可用是AUV水下导航定位面临的主要技术挑战之一。
在不使用声学基线定位系统的情况下,AUV在水下主要依靠自身搭载的罗经、多普勒计程仪(Doppler Velocity Logger,DVL)或惯性导航系统提供的各类导航信息,通过航位推算模式实现水下导航定位。
惯性导航/航位推算方法精度受传感器本身测量精度影响,会随时间迅速积累。
在DVL锁定海底并且能够提供有效对地速度辅助导航的情况下,惯性导航/航位推算的导航误差一般为航行距离的0.5-2%,如果使用高精度的惯性导航设备,导航误差能够优于航行距离的0.1%。
当在水面时,AUV可以通过GNSS(Global Navigation Satellite System)获得的绝对位置来实时修正惯性导航系统误差。
但是定时上浮接收GNSS信号来实现对惯性导航误差的校正在实际应用过程中往往是不现实的,尤其在深水调查作业中。
在过去的二十年间,AUV水下导航定位技术研究取得了实质性的进展。
以视觉导航和地磁匹配导航技术为代表的非传统导航方式逐步开始在水下导航中得到应用,并取得了一定的成果。
除此之外,用于解决机器人导航定位的同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)算法技术日渐成熟,在水下导航定位方面的应用研究也取得了一定的理论和实践成果[2]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x z tan x
2018/10/6
x9
记
(dt)1 t3 t1
,
(dt) 2 t 2 t1
因此有
而
sin x dR / D1 c (dt)1 / D1
x z tan x
当船在信标上方附近时,θX很小,有 问题:信 标深度如 tan x sin x 。因此有
7 2018/10/6
2.2 使用非同步信标的短基线系统
定位解算的思路:
通过测量两两水听器接收信号的时间差,确定信标相对 水面船的距离。
由于使用的是非同步信标,只能利用时间差进行测向, 在进行定位。 利用几何关系建立定位方程。
解方程,确定水面船的相对信标的位置。
根据信标的绝对位置,确定水面船的位置坐标。
T ( x, y, z)
13 2018/10/6
H3器的坐标为 T(x,y,z) 不考虑声线弯曲时, 由几何关系可以得到 定位方程
2 1 2 2
x
H4 P H2 (a,b) R2
(-a,b)
R4
R3
R1
y
2 2
R ( x a) ( y b) z R ( x a) ( y b) z
何知道?
应答器的 位置事先 类似地,计算出信标在y轴的位移,得到 是如何确 定的?
x z c (dt)1 / D1
y z c (dt)2 / D2
10
2018/10/6
2.3 使用应答器的短基线水声定位系统
使用应答器的优点
只有问答机发出询问信号时,应答器才回答。无询问 信号时,它保持安静,使电池寿命得以延长; 可利用绝对往返时间求解,不需要简化假设。使用非 同步信标方式,只能利用时差,不得不作假设;
6
2018/10/6
2.2 使用非同步信标的短基线系统
分析: 用信标定位的目的:要知道船或目标(应答 器)的大地位置,首先需要知道船与信标的 相对位置。 定位条件:船上只需3只接收器 设要求解的船的坐标是:x、y、z,信号的为 θx,已知信标深度为Z、两换能器的间距分别 为D1 、D2 ,测得两两水听器接收信号的时延 差。 可用通过几何关系可列出它们之间的关系方 程。
使用应答器
的短基线水 声定位系统 (船上除有 水听器阵外, 还有问答机)
12
2018/10/6
定位解算方法
设应答器的坐标为,
T ( x, y, z)
有4个水听器位于边 长为2a,2b的矩形 顶点 有X、y、z三个未知 数,3个水听器可有3 个斜距,列3个方程 有一个冗余的水听器, 有何意义?
其它水听器接收它的信号。它常用于噪声较强的场合。
3 2018/10/6
短基线系统(SBL )
系统组成
被定位的船或 潜器上至少有3 个水听器。 间距在5~20 米的量级。 水面船上面装 有问答机 一个同步信标 (或应答器) 置于海底
工作原理
问答机接收来自信标(或应答器)发出的信号,根据 信号到达各基元的时间,求得斜距,据此可计算水面 船相对于信标(或应答器)的位置。
8
2018/10/6
D1
定位解算方法
H3
H1 H2
D2
x
θ x为沿x轴的 两个水听器的 信号入射角
y
简化假设:
dR
H3 D R3
B
A
θX
E
H1
R1 R 1
dR R3 R1 ct3 ct1 D1 sin x
x
C
z
x
考虑船与信标的 距离较远,船在信 标的上方。因此,3 个入射角θ 较小, 且近似相等,用θx 代替。
声信标(Beacon或Pinger) 响应器( Responder) 是安装在船上的发射器和接收器。它以一个频率发出
询问信号,并以另一频率接收回答信号。接收频率可 是置于海底或装在载体上的发射 /接收器。 以多个,对应于多个应答器,常常只相隔0.5kHz。发 它接收问答机的询问信号(或指令),发回 问答器:先发后收,发射器和接收器可在一起也可分开。 射和接收换能器是无指向性的。 另一与接收频率不同的回答信号。收发换能 器无指向性的。 置于海底或装在水下载体(潜器)上的发射器,它以 应答器:先收后发,发射和接收共用一个换能器。 特定频率不停的发出声脉冲。它是自主工作的。声信 置于海底或装在水下载体(潜器)上的发射器,它由外部硬 标分同步式和非同步式两种。 件(如控制线)的控制信号触发,发出询问信号。问答机或
可以编程询问,按需要调整数据速率。在多个应答器 的情况下,可在时间上调整询问,避免回答重叠;
因询问时刻已知,可用时间窗接收,从而降低虚警并 减小多途回波的干扰; 在两个问答机和两个应答器的情况,有可能根据几何 关系确定最佳可视范围。
11 2018/10/6
2.3 使用应答器的短基线水声定位系统
4 2018/10/6
典型的SBL系统的工作原理
使用非同步信标的短基线系统
使用应答器的短基线水声定位系统
5 2018/10/6
测时方法: 采用常规脉冲包络检波和相对到达时间测量方法。
定位精度:
一般在长基线和超短基线系统之间。 特点及存在的问题: 水听器需要安装在载体的不同位置,有些水听器有时不 可避免地会处于噪声较大的位置,从而影响定位效果。 问题: 有无其它的信号形式? 有无其它的测时方法?效果如何?
介绍短基线定位系统的实例
由定位方程进行定位解算的方法 定位误差的分析 基阵校准与水下姿态修正 距离模糊问题(定位系统存在的普遍问题)
2 2018/10/6
2.1 引言
一些名词的解释
注意:问答器和应答器的区别。
询问器或问答机(Interogator)
应答器(Transponder)
水下定位与导航技术
第二章 短基线水声定位系统 (Ultra-short baseline positioning system --SBL)
2018/10/6
1
本章要解决的问题
短基线定位系统的结构(组成)和原理 三种工作模式(同步和非同步信标方式、应答器方式) 下的定位算法(位置解算公式) 解算后位置修正问题(坐标变换是通用的。基阵坐标 系、转换为船坐标系、大地坐标系)