机械设计基础第五版讲义第3章
合集下载
机械设计基础高教五版课件 (3)
度(a)随时间(t)或凸轮转角(δ)
的变化规律。 从动件运动方程:S=S(t) S=S(δ) V=V(t) V=V(δ) 运动规律的表示方法 a=a(t) a=a(δ)
从动件运动线图
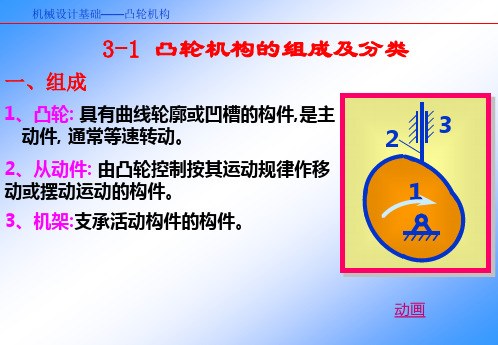
名词术语及符号
1)基圆:以凸轮轮廓的最小向
径rb为半径所作的圆 2)推程: 当凸轮以等角速度ω逆时 针转过δ0角时,从动件 由最低位置A被到最高位 置B的运动过程. 相应的凸轮转角δ0称为推 程角
3.1.2
凸轮机构的分类
3.按从动件的运动方式分类
对心直动从动件
偏置直动从动件
摆动从动件
直动从动件
3.1.2
凸轮机构的分类
4.按凸轮于从动件保持接触的方式(锁合方式)分类
力锁合
凹槽凸轮机构
等径凸轮机构
等宽凸轮机构
形锁合
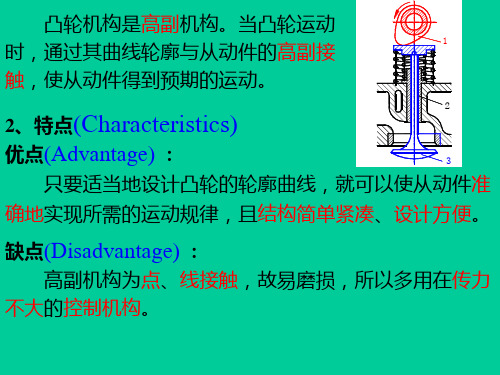
3.1.3 凸轮机构的特点
功用
将主动凸轮的连续转动或往复运动转化为从动件的往 复移动或摆动,而从动件的运动规律按工作要求拟定。
h δ
1
δ
1
δ
-∞
1
2. 等加等减速(二次多项式)运动规律 位移曲线为一抛物线。加、减速各占一半。
推程加速上升段边界条件:
起始点:δ 1=0,
中间点:δ 1=δ
t
s2=0, v2=0 /2,s2=h/2
求得:C0=0, C1=0,C2=2h/δ2t 加速段推程运动方程为:
s2 =2hδ21 /δ2t v2 =4hω1δ1 /δ2t a2 =4hω21 /δ2t
内燃机气门机构
3.1.1 凸轮机构的应用
绕线机中的排线机构
应用实例:
3
线
2 A
设计:潘存云
1
机械设计基础 第三章 凸轮机构
s h 0
0
v
0 a +
0 -
机械设计基础——凸轮机构
等速运动(续)
回程(0’0) 运动方程: 位移方程: s h1 / 0 ' 速度方程: v h / 0 加速度方程:a 0
s h 0’
0
0
v
0 - -
s h 2h( 0 )
2
h
推程 运动方程:
s
h/2
0
0/2 0
0/2
s
v
2h
2
4 h
2 0
v
02 4h 2 a 02
0 a 0
运动线图 冲击特性:起、中、末点柔性冲击 适用场合:低速轻载
机械设计基础——凸轮机构
三、从动件运动规律的选择
实际使用时, 推程或回程的运动规律可采用单一运动规律 ,也可以 将几种运动规律复合使用。 1. 当机械的工作过程只要求推杆实现一定的工作行程,而对运 动规律无特殊要求时,主要考虑动力特性和便于加工 低速轻载时,便于加工优先; 速度较高时,动力特性优先。 2. 当机械的工作过程对推杆运动规律有特殊要求时: 转速较低时,首先满足运动规律,其次再考虑动力特性和加工 转速较高时,兼顾运动规律和动力特性,采用组合运动
t
0
推程
01
远休止
rb
0’
回程
02
近休止
C
回程,回程运动角0’ 近休止,近休止角02 行程(升程),h 运动线图: 从动件的位移、速度、加速度等随时 间t或凸轮转角j变化关系图
机械设计基础——凸轮机构
0
v
0 a +
0 -
机械设计基础——凸轮机构
等速运动(续)
回程(0’0) 运动方程: 位移方程: s h1 / 0 ' 速度方程: v h / 0 加速度方程:a 0
s h 0’
0
0
v
0 - -
s h 2h( 0 )
2
h
推程 运动方程:
s
h/2
0
0/2 0
0/2
s
v
2h
2
4 h
2 0
v
02 4h 2 a 02
0 a 0
运动线图 冲击特性:起、中、末点柔性冲击 适用场合:低速轻载
机械设计基础——凸轮机构
三、从动件运动规律的选择
实际使用时, 推程或回程的运动规律可采用单一运动规律 ,也可以 将几种运动规律复合使用。 1. 当机械的工作过程只要求推杆实现一定的工作行程,而对运 动规律无特殊要求时,主要考虑动力特性和便于加工 低速轻载时,便于加工优先; 速度较高时,动力特性优先。 2. 当机械的工作过程对推杆运动规律有特殊要求时: 转速较低时,首先满足运动规律,其次再考虑动力特性和加工 转速较高时,兼顾运动规律和动力特性,采用组合运动
t
0
推程
01
远休止
rb
0’
回程
02
近休止
C
回程,回程运动角0’ 近休止,近休止角02 行程(升程),h 运动线图: 从动件的位移、速度、加速度等随时 间t或凸轮转角j变化关系图
机械设计基础——凸轮机构
机械设计基础第3章凸轮机构
2)运动线图(推程):表3-1
s
h
3)运动特点:产生刚性冲击
ψ
∵ 从动件在运动开始和终止的瞬
Φ
t
时,因速度有突变,则加速度 v
a在理论上出现瞬时的无穷大,
hω/Φ
ψ
导致从动件突然产生非常大的 a
t
惯性力,因而使凸轮机构受到
ψ
极大的冲击,这种冲击称为刚
t
性冲击。
4)适用场合:低速运动或不宜单独使用。
ψ
点作各自的垂线与水平线,交点
v
Φ
即为s曲线上的点,光滑连接这
些点,得到s图。
ψ a
3)运动特点:产生柔性冲击
∵在首、末两点从动件的加速度
ψ
有突变,因此也有柔性冲击。
4)适用场合:中、低速运动。
4、正弦加速度(摆线)运动规律 从动件在运动过程中加速度呈正弦曲线规律变化。
1)运动方程:表3-1 s=h[ψ/Φ-sin(2πψ/Φ)/2π]
一、压力角α与作用力的关系
(前面已讲过)压力角α(或传动角γ)的大小反映 了机构传动性能的好坏。α↓( 或γ↑),机构的传动性能越好。
压力角α:作用在从动件上的驱动力 方向(即沿接触点处的法线方向)与该力 作用点的绝对速度方向之间所夹的锐角。 注意:对于滚子从动件,压力角要作在
理论廓线上。
F可分解为:F′= Fcosα——有效分力
4 2 3
1
图3-4
如图所示的靠模车削机 构,工件1转动时,并和靠模 板3一起向右移动,由于靠模 板的曲线轮廓推动,刀架2带 着车刀按一定的运动规律作 横向运动,从而车削出具有 曲线表面的手柄。
如图所示的绕线机构,当 具有凹槽的圆柱凸轮转动时, 迫使从动件作往复移动,从而 均匀地将线绕在轴上。
机械设计基础第三章平面连杆机构
2
BD
a2
d2
2adcos
2
BD
b2
ቤተ መጻሕፍቲ ባይዱ
c2
2bccos
cos b2 c2 - a2 d2 2adcos 2bc
90
b
B
δmax
a
A
d
Fn
Cγ α
F Ft
δ
Vc
c
δmin
D
三、急回运动和行程速比系数
1. 极位夹角
当机构从动件处于两极限位置时,主动件曲柄在两相 应位置所夹的锐角
曲柄摇杆机构的极位夹角
C C
C
b B
aA
d
D
B
曲柄滑块机构的极位夹角
B
A
B
C
摆动导杆机构的极位夹角
A
B
e C
D
Bd
2. 急回运动
当曲柄等速回转的情况下,
通常把从动件往复运动速度快慢
C1
不同的运动称为急回运动。
b
c
主动件a
从动件c
1 B2 b
运动:AB1 AB2
时间:t1
转角:1
DC1 DC2
t1
a
a
A 2
d
B1
❖
好的事情马上就会到来,一切都是最 好的安 排。上 午10时54分35秒上午10时54分10:54:3520.10.24
❖
一马当先,全员举绩,梅开二度,业 绩保底 。20.10.2420.10.2410:5410:54:3510:54:35Oc t-20
❖
牢记安全之责,善谋安全之策,力务 安全之 实。2020年10月24日 星期六10时54分35秒 Saturday, October 24, 2020
《机械设计基础》课件第3章
(3)在机构中,不影响机构运动传递的重复部分所带入的 约束为虚约束。如图3-14所示的周转轮系中,为了受力均衡 而采用三个行星轮对称布置,从传递运动的角度来看,只需 一个行星轮2即可,行星轮2′、2″
图3-13 两构件组成多个运动副时引入的虚约束
图3-14 对称结构引入的虚约束
在实际机构中,虚约束虽然不影响机构的运动,但可增 加构件的刚性,改善其受力状况,或保证机构顺利通过某些 特殊位置等,因而在结构设计中被广泛使用。必须指出,只 有在特定的几何条件下才能构成虚约束,如果加工误差过大, 满足不了这些特定的几何条件(如两构件组成两个移动副而导 路不平行、两构件组成两个转动副而轴线不重合,或如图312(b)中BE≠AF等),虚约束就会成为实际约束,从而使机构失 去运动的可能性。
表3-2 一般构件的常用表示法
表3-3
2.机构运动简图的画法 一般按照以下步骤绘制机构运动简图: (1)确定构件的作用和类型。为了使机构运动简图能正确 无误地表达机构的结构和运动情况,首先要把整台机器的结 构和动作原理搞清楚,然后分清要画的机构构件的类型和数 目,即确定出机构中哪个是机架,哪些是原动件,哪些是从动构
图3-10 直线机构
图3-11 局部自由度
滚子是平面机构中局部自由度最常见的形式。为了防止 计算差错,在计算自由度时,可以设想滚子与安装滚子的构 件焊成一体(如图3-11(b)所示),预先排除局部自由度,然后进
3.虚约束 机构的运动不仅与构件及运动副的数量和性质有关,而 且与转动副间的距离、移动副导路的方向、高副曲率中心的 位置等几何条件密切相关。但是,式(3-1)并没有考虑几何条 件的影响。在特定的几何条件下,有些约束所起的限制作用 是重复的。这种不起独立限制作用的约束称为虚约束。在计 算机构自由度时,虚约束应当除去不计。虚约束通常出现在
图3-13 两构件组成多个运动副时引入的虚约束
图3-14 对称结构引入的虚约束
在实际机构中,虚约束虽然不影响机构的运动,但可增 加构件的刚性,改善其受力状况,或保证机构顺利通过某些 特殊位置等,因而在结构设计中被广泛使用。必须指出,只 有在特定的几何条件下才能构成虚约束,如果加工误差过大, 满足不了这些特定的几何条件(如两构件组成两个移动副而导 路不平行、两构件组成两个转动副而轴线不重合,或如图312(b)中BE≠AF等),虚约束就会成为实际约束,从而使机构失 去运动的可能性。
表3-2 一般构件的常用表示法
表3-3
2.机构运动简图的画法 一般按照以下步骤绘制机构运动简图: (1)确定构件的作用和类型。为了使机构运动简图能正确 无误地表达机构的结构和运动情况,首先要把整台机器的结 构和动作原理搞清楚,然后分清要画的机构构件的类型和数 目,即确定出机构中哪个是机架,哪些是原动件,哪些是从动构
图3-10 直线机构
图3-11 局部自由度
滚子是平面机构中局部自由度最常见的形式。为了防止 计算差错,在计算自由度时,可以设想滚子与安装滚子的构 件焊成一体(如图3-11(b)所示),预先排除局部自由度,然后进
3.虚约束 机构的运动不仅与构件及运动副的数量和性质有关,而 且与转动副间的距离、移动副导路的方向、高副曲率中心的 位置等几何条件密切相关。但是,式(3-1)并没有考虑几何条 件的影响。在特定的几何条件下,有些约束所起的限制作用 是重复的。这种不起独立限制作用的约束称为虚约束。在计 算机构自由度时,虚约束应当除去不计。虚约束通常出现在
机械设计基础--第3章轮系1

由于轮2既有自转又有公转,故不 能直接求传动比
ω2
ωH
1
3
1
3
轮1、3和系杆作定 轴转动
ω1
施加-ω H后系杆成为机架,原轮系转化为定轴轮系
齿轮1,3 :绕固定的轴线回转 中心轮 central gear 齿轮2 :自转+公转 行星轮 planet gear
H : 支承行星轮并使其公转的支架 转臂 crank arm 回转中心必须与中心轮轴线重合
二、传动比符号的确定 两种方法:
ω1 1
转向相反 ω2
p 转向相同 p vp
2 1.用“+” “-”表 vp 示 适用于平面定轴轮系(轴线平行,
ω1
1 2
ω2
两轮转向不是相同就是相反)。 外啮合齿轮:两轮转向相反,用“-”表示;
每一对外齿轮反向一次考 内啮合齿轮:两轮转向相同,用“+”表示。 虑方向时有
1 2 3 H
2 H 1
n1 n2 n3 nH
nH 1 = n1 - nH nH 2 = n2 - nH nH 3 = n 3 - nH nH H = n H - nH = 0
回
顾
• 斜齿轮共轭齿廓曲面的形成,斜齿轮正 确啮合条件、几何尺寸计算(分度圆直 径、中心距); • 斜齿轮传动重合度与直齿轮的差异; • 斜齿轮当量齿数; • 圆锥齿轮齿廓曲面和当量齿数。
第三章
轮
系
§3-1 轮系的类型 §3-2 定轴轮系及其传动比 §3-3 周转轮系及其传动比
§3-4 复合轮系及其传动比 §3-5 轮系的应用
§3-6 几种特殊的行星传动简介
§ 3- 1
轮系的类型
定义:由一系列两两啮合的齿轮组成的传动系统- 简称轮系
ω2
ωH
1
3
1
3
轮1、3和系杆作定 轴转动
ω1
施加-ω H后系杆成为机架,原轮系转化为定轴轮系
齿轮1,3 :绕固定的轴线回转 中心轮 central gear 齿轮2 :自转+公转 行星轮 planet gear
H : 支承行星轮并使其公转的支架 转臂 crank arm 回转中心必须与中心轮轴线重合
二、传动比符号的确定 两种方法:
ω1 1
转向相反 ω2
p 转向相同 p vp
2 1.用“+” “-”表 vp 示 适用于平面定轴轮系(轴线平行,
ω1
1 2
ω2
两轮转向不是相同就是相反)。 外啮合齿轮:两轮转向相反,用“-”表示;
每一对外齿轮反向一次考 内啮合齿轮:两轮转向相同,用“+”表示。 虑方向时有
1 2 3 H
2 H 1
n1 n2 n3 nH
nH 1 = n1 - nH nH 2 = n2 - nH nH 3 = n 3 - nH nH H = n H - nH = 0
回
顾
• 斜齿轮共轭齿廓曲面的形成,斜齿轮正 确啮合条件、几何尺寸计算(分度圆直 径、中心距); • 斜齿轮传动重合度与直齿轮的差异; • 斜齿轮当量齿数; • 圆锥齿轮齿廓曲面和当量齿数。
第三章
轮
系
§3-1 轮系的类型 §3-2 定轴轮系及其传动比 §3-3 周转轮系及其传动比
§3-4 复合轮系及其传动比 §3-5 轮系的应用
§3-6 几种特殊的行星传动简介
§ 3- 1
轮系的类型
定义:由一系列两两啮合的齿轮组成的传动系统- 简称轮系
机械设计基础第3章PPT

80 60
40
20 15
10 8 6
4
2 1.5
1 0.8 0.6 0.4
32A 2 4A28 A 20 A 16 A
1 2A 10 A 08 A
链号
08A 10A 12A 16A 20A 24A 28A 32A
节 距/ m m
12.7 15.875 19.05
25.4 31.75 38.1 41.45 50.8
0.2
0.15 0.1 10
15 20
40
60 80 100150200
400 600 1000 2000 800 1500
4 0 0 06 0 0 0
小 链 轮 转 速 n1 ( r / m i n )
23
、
3.8 滚子链传动的设计
n12
3.8.3滚子链的设计计算
1.设计链传动的已知条件和内容
第3章 带传动和链传 动
3.4.1 带传动的主要失效形式和设计准则
带传动的主要失效形式有带的打滑和带的疲 劳破坏。因此,带传动的设计准则是:在保 证不打滑的前提下,传动带应具有足够的疲劳 强度和一定的使用寿命。
第3章 带传动和链传 动
3.4.2单根V带的基本额 定功率
(3-10)
表3-4给出了单根V带的基本额定功率P
值(仅列出D型)
普通V带已标准化,按截面尺 寸分为Y、Z、A、B、C、D、 E 七种型号
7
3.2.2 V带轮的材料和结构
第3章 带传动和链传 动
图3-5 V带轮(腹板式) 1一轮缓2一瞧板3一轮毂
表3-3 V带轮的基准直径系列 (摘自 GB/T13575.5-1992)
8
3.3 普通V带传动工作能力分析 3.3.1 带传动的受力分析
40
20 15
10 8 6
4
2 1.5
1 0.8 0.6 0.4
32A 2 4A28 A 20 A 16 A
1 2A 10 A 08 A
链号
08A 10A 12A 16A 20A 24A 28A 32A
节 距/ m m
12.7 15.875 19.05
25.4 31.75 38.1 41.45 50.8
0.2
0.15 0.1 10
15 20
40
60 80 100150200
400 600 1000 2000 800 1500
4 0 0 06 0 0 0
小 链 轮 转 速 n1 ( r / m i n )
23
、
3.8 滚子链传动的设计
n12
3.8.3滚子链的设计计算
1.设计链传动的已知条件和内容
第3章 带传动和链传 动
3.4.1 带传动的主要失效形式和设计准则
带传动的主要失效形式有带的打滑和带的疲 劳破坏。因此,带传动的设计准则是:在保 证不打滑的前提下,传动带应具有足够的疲劳 强度和一定的使用寿命。
第3章 带传动和链传 动
3.4.2单根V带的基本额 定功率
(3-10)
表3-4给出了单根V带的基本额定功率P
值(仅列出D型)
普通V带已标准化,按截面尺 寸分为Y、Z、A、B、C、D、 E 七种型号
7
3.2.2 V带轮的材料和结构
第3章 带传动和链传 动
图3-5 V带轮(腹板式) 1一轮缓2一瞧板3一轮毂
表3-3 V带轮的基准直径系列 (摘自 GB/T13575.5-1992)
8
3.3 普通V带传动工作能力分析 3.3.1 带传动的受力分析
第3章 平面连杆机构PPT课件
0
3 90 0
C
17
3.2.2.3 死点位置
曲柄摇杆机构中取摇杆为主动件时,当曲柄与连杆共 线时,连杆对从动件曲柄的作用力通过转动中心A,传动角 为零,力矩为零,称为死点位置。
18
死点的利用: B2
A
D
C2
B1
C1 地面
飞机起落架机构
请思考:下列机构的死点位置在哪里;怎样使机构通过死点位置
机械设计基础 3 平面连杆机构
1
整体概述
概述一
点击此处输入
相关文本内容
概述二
点击此处输入
相关文本内容
概述三
点击此处输入
相关文本内容
2
3.1平面连杆机构的特点及其设计的基本问题
连杆机构是由若干刚性构件用低副连接而成的 平面机构,又称低副机构。根据其构件间的相对运动 分为平面或空间连杆机构。
。
3
3.1.1特点
t2 2/1
v2C2C1/t2 11
(2)输出件的行程速比系数K:
空回行程平均速度v2与工作行程平均速度v1之比。
Kv2 v1
t1 t2
1 2
118800
180 K1
K1
平面四杆机构具有急回特性的条件:
(1)原动件作等速整周转动; (2)输出件作往复运动;
(3) 0
12
2.曲柄滑块机构中,原动件AB以 1 等速转动
3
3
C
A1
1
2
B
F vB3
0
3
C
B
1
a
2
b
C
A
3
4 vc
画出压力角
15
2、平面四杆机构的最小传动角位置
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
线 2A 1
zpofrp 2013-10-23
绕线机构
3-1 凸轮机构的应用和类型
卷带轮
12 1 放放音 音键 键
5
3
3
摩擦轮
4 4
录音机卷带机构
皮皮带带轮轮
zpofrp 2013-10-23
3-1 凸轮机构的应用和类型
2
3
zpofrp 2013-10-23
1 送料机构
3-1 凸轮机构的应用和类型
lOP =lCP- lOC → lCP = ds/d φ + e
lCP = (S+注S0意) t:an α S0= rmin2-e2
n
得: 于是:
ttaa同能nn αα时太==增大用SS大。dd偏++ss//了dd置rr22φφ回mm法+±iinn程e--可eee压22减力小角推,程ss故0压偏力ω距CD角αBre,mOi不n但P
n
“+” 用于导路和瞬心位于中心两侧;
“-” 用于导路和瞬心位于中心同侧;
e ds/d φ
显然,导路和瞬心位于中心同侧时,压力角将减小。
zpofrp 2013-10-23
3-4 图解法设计凸轮轮廓
一、凸轮廓线设计方法的基本原理
反转原理:
给整个凸轮机构施以-ω时, 不影响各构件之间的相对运动, 此时,凸轮将静止,而从动件 尖顶复合运动的轨迹即凸轮的
n
v B
lCP = (S+S0 ) tan α S0=
tanα
=
ds/d φ S + r2min
e -
e2
rmin ↑ → α↓
r2min - e2
ω
s
rmiDn α v
s0
OP
eC
n
若发现设计结果α〉[α],可增大 rmin
ds/d φ
zpofrp 2013-10-23
3-3 凸轮机构的压力角
同理,当导路位于中心左侧时,有:
Ff
不考虑摩擦时,作用力沿法线方向。
F ---- 有用分力,沿导路方向
n
F
α
F′
F ---- 有害分力,垂直于导路
F″
B
[α]=30F ˚- --F 直ta 动n从动件;
F′一[[αα定]]时==37,50° °α~ ~↑4850°°--F----
″摆↑动从动件;ω 回程。
O
若α大到一定程度时,会有:
第3章 凸轮机构
§3-1 凸轮机构的应用和类型 §3-2 从动件的常用规律 §3-3 凸轮机构的压力角 §3-4 图解法设计凸轮轮廓
3-1 凸轮机构的应用和类型
zpofrp 2013-10-23
内燃机配气机构
3-1 凸轮机构的应用和类型
zpofrp 2013-10-23
靠模车削机构
3-1 凸轮机构的应用和类型
轮廓曲线。
-ω 1
3’
2’
2
1’
ω
1 2
O
3
3
➢ 依据此原理可以用几何作图的方法设计凸轮的轮廓
曲线。
zpofrp 2013-10-23
3-4 图设①解计选法步比设骤例小计尺结μ凸l:作轮基圆轮rm廓in;
② 反向等分各运动角;
1、偏③置确尖定顶反直转动后从,从动动件件盘尖形顶凸在轮各等轮份廓点的的绘位制置;
Ff > F′
机构发生自锁
n
为了保证凸轮机构正常工作,要求:
α max
<
[α]
zpofrp 2013-10-23
3-3 凸轮机构的压力角
二、压力角与凸轮机构尺寸之间的关系
P点为速度瞬心, 于是有:
v = lOPω → lOP = v / ω = ds/d φ = lOC + lCP
lOC = e lCP = ds/d φ - e
s
将几种运动 规律组合, 以改善运动 特性。
zpofrp 2013-10-23
h
o
φ
Ф
v
o
φ
a +∞ φ
o
正弦改进等速 -∞
3-2 从动件的常用运动规律
四、运动规律的特性比较
运动规律
等速 等加速等减
速 余弦加速度 正弦加速度 五次多项式 变形梯形加
速度
vmax/ms-1
h/×
1.00
2.00
1.57 2.00 1.88
φ
a
柔性冲击:
在起始和终止处理论上a为
φ
有限值,产生柔性冲击。
zpofrp 2013-10-23
3-2 从动件的常用运动规律
3. 正弦加速度运动(了解)
sh 21sin2
vh1co2s
a2h2 sin2
2
运动特征:没有冲击
zpofrp 2013-10-23
3-2 从动件的常用运动规律
4. 改进型运动规律
④ 将各尖顶点连接成一条光滑曲线。
zpofrp 2013-10-23
3-4 图设①解计选法步比设骤例小计尺结μ凸l:作轮基圆轮rm廓in;
② 反向等分各运动角;原则是:陡密缓疏。
2、滚③子确直定动反从转动后件,从盘动形件凸尖轮顶轮在廓各等的份绘点制的位置;
v C1 a dv 0
dt
s
h
v
v0
h
a 0
刚性冲击:
由于加速度发生无穷大突 度而引起的冲击称为刚性 冲击。
zpofrp 2013-10-23
3-2 从动件的常用运动规律
2. 简谐运动
sh1cos
2
vhsin
2
ah22 cos
22
5 6s
4
3
h
2φ1 1 2Fra bibliotek34 5 6Ф
v
zpofrp 2013-10-23
3-2 从动件的常用运动规律
一、凸轮机构设计的基本任务
1) 根据工作要求选定凸轮机构的形式;
2) 从动件运动规律;
3) 合理确定结构尺寸;
s
4) 设计轮廓曲线。
二、基本概念与名称
h
B’ A D 02 rmin
t
o 0 01 ’0 02
• 基圆
• 升程
• 远休止角 • 推程运动角
2.00
amax/ms-1
h/2×
∞
4.00
4.93 6.28 5.77
4.89
zpofrp 2013-10-23
冲击 刚性 柔性 柔性 —— —— ——
推荐应用 范围
低速轻载
中速轻载
中速中载 高速轻载 高速中载
高速轻载
3-3 凸轮机构的压力角
定义:正压力与推杆上力作用点B速度方向间的夹角α。
一、压力角与作用力的关系
凸轮机构组成: 凸轮、从动件、机架。
凸轮机构的优点:
只需设计适当的凸轮轮廓 结构简单、紧凑,设计方便
凸轮机构的缺点:
高副机构,易磨损
zpofrp 2013-10-23
3-1 凸轮机构的应用和类型
凸轮机构的分类
按照凸轮的形状:
盘形凸轮
移动凸轮
圆柱凸轮
按照从动件的型式:
尖顶从动件 平底从动件
滚子从动件
’0
0 ω
01 B
• 近休止角 • 回程运动角
C
zpofrp 2013-10-23
3-2 从动件的常用运动规律 三、常用运动规律
位移 速度 加速度
线图。从动件运动规律通常表示成 的函数:
sf
vf
af
zpofrp 2013-10-23
3-2 从动件的常用运动规律
1. 等速运动
svdC t0C 1t
线 2A 1
zpofrp 2013-10-23
绕线机构
3-1 凸轮机构的应用和类型
卷带轮
12 1 放放音 音键 键
5
3
3
摩擦轮
4 4
录音机卷带机构
皮皮带带轮轮
zpofrp 2013-10-23
3-1 凸轮机构的应用和类型
2
3
zpofrp 2013-10-23
1 送料机构
3-1 凸轮机构的应用和类型
lOP =lCP- lOC → lCP = ds/d φ + e
lCP = (S+注S0意) t:an α S0= rmin2-e2
n
得: 于是:
ttaa同能nn αα时太==增大用SS大。dd偏++ss//了dd置rr22φφ回mm法+±iinn程e--可eee压22减力小角推,程ss故0压偏力ω距CD角αBre,mOi不n但P
n
“+” 用于导路和瞬心位于中心两侧;
“-” 用于导路和瞬心位于中心同侧;
e ds/d φ
显然,导路和瞬心位于中心同侧时,压力角将减小。
zpofrp 2013-10-23
3-4 图解法设计凸轮轮廓
一、凸轮廓线设计方法的基本原理
反转原理:
给整个凸轮机构施以-ω时, 不影响各构件之间的相对运动, 此时,凸轮将静止,而从动件 尖顶复合运动的轨迹即凸轮的
n
v B
lCP = (S+S0 ) tan α S0=
tanα
=
ds/d φ S + r2min
e -
e2
rmin ↑ → α↓
r2min - e2
ω
s
rmiDn α v
s0
OP
eC
n
若发现设计结果α〉[α],可增大 rmin
ds/d φ
zpofrp 2013-10-23
3-3 凸轮机构的压力角
同理,当导路位于中心左侧时,有:
Ff
不考虑摩擦时,作用力沿法线方向。
F ---- 有用分力,沿导路方向
n
F
α
F′
F ---- 有害分力,垂直于导路
F″
B
[α]=30F ˚- --F 直ta 动n从动件;
F′一[[αα定]]时==37,50° °α~ ~↑4850°°--F----
″摆↑动从动件;ω 回程。
O
若α大到一定程度时,会有:
第3章 凸轮机构
§3-1 凸轮机构的应用和类型 §3-2 从动件的常用规律 §3-3 凸轮机构的压力角 §3-4 图解法设计凸轮轮廓
3-1 凸轮机构的应用和类型
zpofrp 2013-10-23
内燃机配气机构
3-1 凸轮机构的应用和类型
zpofrp 2013-10-23
靠模车削机构
3-1 凸轮机构的应用和类型
轮廓曲线。
-ω 1
3’
2’
2
1’
ω
1 2
O
3
3
➢ 依据此原理可以用几何作图的方法设计凸轮的轮廓
曲线。
zpofrp 2013-10-23
3-4 图设①解计选法步比设骤例小计尺结μ凸l:作轮基圆轮rm廓in;
② 反向等分各运动角;
1、偏③置确尖定顶反直转动后从,从动动件件盘尖形顶凸在轮各等轮份廓点的的绘位制置;
Ff > F′
机构发生自锁
n
为了保证凸轮机构正常工作,要求:
α max
<
[α]
zpofrp 2013-10-23
3-3 凸轮机构的压力角
二、压力角与凸轮机构尺寸之间的关系
P点为速度瞬心, 于是有:
v = lOPω → lOP = v / ω = ds/d φ = lOC + lCP
lOC = e lCP = ds/d φ - e
s
将几种运动 规律组合, 以改善运动 特性。
zpofrp 2013-10-23
h
o
φ
Ф
v
o
φ
a +∞ φ
o
正弦改进等速 -∞
3-2 从动件的常用运动规律
四、运动规律的特性比较
运动规律
等速 等加速等减
速 余弦加速度 正弦加速度 五次多项式 变形梯形加
速度
vmax/ms-1
h/×
1.00
2.00
1.57 2.00 1.88
φ
a
柔性冲击:
在起始和终止处理论上a为
φ
有限值,产生柔性冲击。
zpofrp 2013-10-23
3-2 从动件的常用运动规律
3. 正弦加速度运动(了解)
sh 21sin2
vh1co2s
a2h2 sin2
2
运动特征:没有冲击
zpofrp 2013-10-23
3-2 从动件的常用运动规律
4. 改进型运动规律
④ 将各尖顶点连接成一条光滑曲线。
zpofrp 2013-10-23
3-4 图设①解计选法步比设骤例小计尺结μ凸l:作轮基圆轮rm廓in;
② 反向等分各运动角;原则是:陡密缓疏。
2、滚③子确直定动反从转动后件,从盘动形件凸尖轮顶轮在廓各等的份绘点制的位置;
v C1 a dv 0
dt
s
h
v
v0
h
a 0
刚性冲击:
由于加速度发生无穷大突 度而引起的冲击称为刚性 冲击。
zpofrp 2013-10-23
3-2 从动件的常用运动规律
2. 简谐运动
sh1cos
2
vhsin
2
ah22 cos
22
5 6s
4
3
h
2φ1 1 2Fra bibliotek34 5 6Ф
v
zpofrp 2013-10-23
3-2 从动件的常用运动规律
一、凸轮机构设计的基本任务
1) 根据工作要求选定凸轮机构的形式;
2) 从动件运动规律;
3) 合理确定结构尺寸;
s
4) 设计轮廓曲线。
二、基本概念与名称
h
B’ A D 02 rmin
t
o 0 01 ’0 02
• 基圆
• 升程
• 远休止角 • 推程运动角
2.00
amax/ms-1
h/2×
∞
4.00
4.93 6.28 5.77
4.89
zpofrp 2013-10-23
冲击 刚性 柔性 柔性 —— —— ——
推荐应用 范围
低速轻载
中速轻载
中速中载 高速轻载 高速中载
高速轻载
3-3 凸轮机构的压力角
定义:正压力与推杆上力作用点B速度方向间的夹角α。
一、压力角与作用力的关系
凸轮机构组成: 凸轮、从动件、机架。
凸轮机构的优点:
只需设计适当的凸轮轮廓 结构简单、紧凑,设计方便
凸轮机构的缺点:
高副机构,易磨损
zpofrp 2013-10-23
3-1 凸轮机构的应用和类型
凸轮机构的分类
按照凸轮的形状:
盘形凸轮
移动凸轮
圆柱凸轮
按照从动件的型式:
尖顶从动件 平底从动件
滚子从动件
’0
0 ω
01 B
• 近休止角 • 回程运动角
C
zpofrp 2013-10-23
3-2 从动件的常用运动规律 三、常用运动规律
位移 速度 加速度
线图。从动件运动规律通常表示成 的函数:
sf
vf
af
zpofrp 2013-10-23
3-2 从动件的常用运动规律
1. 等速运动
svdC t0C 1t