c传动机构 张紧辊控制原理图
光整机过程控制系统介绍课件

辊缝 = 存储的 HRFC 平均位置 – HRFC 平均位置测量值 式中 :
HRFC 平均位置测量值 = [ HRFC 操作侧位置 + HRFC 驱动侧位置 ] / 2 为了计算辊缝我们必须增加一些调节参数
为了获得带钢表面质量和延伸率,光整机提供必须的轧制力。光整机为 四辊式,采用交流电机传动。在比较高的轧制力下,延伸率改变带钢的 冶金性能(例如屈服强度)和提高带钢平直度。实际的轧制力和延伸率 取决于轧辊粗糙度、产品特征和轧制模式。
光整机侧视简图
光整机控制的PLC柜组成及功能划分
PLC的硬件组成包括s7控制柜机架 带有两个CPU、(分别负责LCO和MRG), CPU458和CPU443 S7 CPU 部分带有 (包括工艺段 S7 CPU): 机架控制 (SC): 机架协调由双重联动装置形成,操作模式选择,标定和液压 辊缝控制,工作辊弯辊控制和延伸率控制 本地设备控制 (LD): 本地设备控制功能包括机架设备动作例如抗皱辊,带吹 扫装置的挤干辊等等 换辊设备 (RC): 换辊设备功能包括换辊小车, 抽送液压缸, 夹钳等等。工作 辊换辊有手动和自动模式,支撑辊是手动模式 高压液压设备(HY): 这部分包括控制和监视功能,高压液压系统例如冷却, 加热,循环和压力泵控制,过滤,液面和温度检测等等. 仪表和控制 (IC): 这部分包括控制和监视功能,湿法光整系统例如加热,计 量和补给泵控制,压力控制,区域进水阀命令,过滤,液面检测和温度监视. 自动延伸率控制 (AEC): 自动延伸率控制包括实际值的测量, 参数, 诊断功能, 自适应, 控制器操作和液压辊缝和传动输出.
张力辊组及其控制pdf

2009年中南·泛珠三角地区第五届图1张力辊组受力分析图T1T离T弹塑VT弹塑T离T1号张力辊nαn2号张力辊αT21前言张力辊组又叫张紧辊组俗称S辊在带材的连续生产线上有着广泛的应用如冷带的酸轧联机、连退、镀锌、重卷、彩涂等机组。
张力辊组的作用是在带材的连续生产线上实现张力的分隔和调节张力辊工作原理带钢包绕在张力辊上在其包绕接触处即包角处产生摩擦力使出口与入口产生张力差由此改变张力辊入口或出口带钢的张力值对机组实现张力控制2张力辊组的受力分析与计算2.1张力辊的受力分析张力辊组的受力分析见图1带钢运动速度和方向见图1中V以1号张力辊为例张力辊入口所受的力为带钢的张力T1、钢带运动的离心拉力T离钢带弹塑拉力T弹塑出口所受的力是张力T、钢带弹塑拉力T弹塑、钢带运动的离心拉力T 离另有机械传动如轴承的摩擦力等未在图中画出图1中T弹塑实线部分受力为张力辊处于电动状态虚线部分受力为张力辊处于发电状态2号张力辊入口和出口的受力与1号张力辊相同2.2张力辊组的计算张力辊的计算主要包括张力辊几何尺寸计算、张力的计算、张力辊传动力矩、传动功率的计算等2.2.1张力辊几何尺寸的确定张力辊辊径的选择应以带钢最外层表面达到屈服极限为出发点这样可防止带钢出现永久变形张力辊的最小半径为D≥E×hmaxσs1式中D———张力辊辊径/mmE———带钢弹性模量/MPahmax———带钢最大厚度/mmσs———带钢屈服极限/MPa张力辊组及其控制黄海生新余钢铁有限责任公司摘要通过对张力辊组进行受力分析与计算分析其工作状态阐述控制方法关键词轧钢板带张力辊组计算控制TensionRollerUnitanditsControlHUANGHai-shengXinyuIronandSteelCompanyLimited AbstractWorkingstatusoftensionrollerunitwasanalyzedbyperformingthestressedanalysisan dcalculationandthecontrollingmethodforitwaselaborated.KeyWordsSteelRollingStripTens ionRollerUnitCalculationControl柳钢科技111柳钢科技2009年中南·泛珠三角地区第五届柳钢科技辊身尺寸依据带钢的宽度选取通常是带宽加200300mm。
涨紧机构
最后说一下:为什么正时皮带维修套 装产品具有市场优势?
其实这个问题我有很多想说的。。。。。。
现在国内一直高调“造车新势力”,提倡新能源全面化深度普及,然 后呢,就有了目前比较网红的三大自主品牌,一个蔚来,一个是小鹏, 另一个就是威马。三个品牌围绕着电动车施展拳脚,给了消费者很大 的感官以及认知方面的冲击。新鲜的事物刚开始总是美好,随后问题 接踵而来。且不说电池的续航,充电基础措施的问题,就单单系统升 级崩溃,维修成本过高,配置华而不实,用户体验闹心的这些问题, 就够售后喝一壶的。我本人是支持造车新势力,但是有一句话说的好, 步子迈大了,容易扯着蛋,蔚来就是个典型的例子,第一个高大上, 第一个交付,第一个被黑。
• 我们倡导发动机预防性维护,通过实行预防性维修保养和更换正时皮带以及相关组件, 可以长远的为您节省成本,而且同时让您拥有一辆更可靠的汽车,这是因为:
• (1)发动机工作时,正时机构传动部件高速运转,并长期处于恶略的工作环境下, 因此正时皮带等橡胶的老化是必然的,达到制造商的建议里程数意味着皮带服务时限 已到,需要更换:(2)张紧器中的轴承、阻尼部件或液压密封件也有一定的寿命, 因此需要定期更换;
• 三缸车在国内逐渐成熟,日常的使用上成本也比较低,首先是燃油水平控 制较好,并且对燃油品质没有太大的要求,这在日常的使用中就节约了一 大笔使用成本。此外三缸机因为没有目前主流四缸机太过精密的电控设计, 从而在保养以及维修上也节约了一大笔使用成本。
• 三缸发动机在未来的一段时间将成为中低端车型市场的主推版本,花更少 的钱享受同样的城市使用乐趣,而且在配置上也更有性价比。
然的燃烧以及排量方面就有着一定的优势,从目前的的燃油限制政
策上也就不需要添加更加精密的机械设计以及电控部分,制造成本 也就更低。
HC轧机、UC轧机、VC辊系统、CVC轧机、FFC轧机、PC轧机、UPC轧机
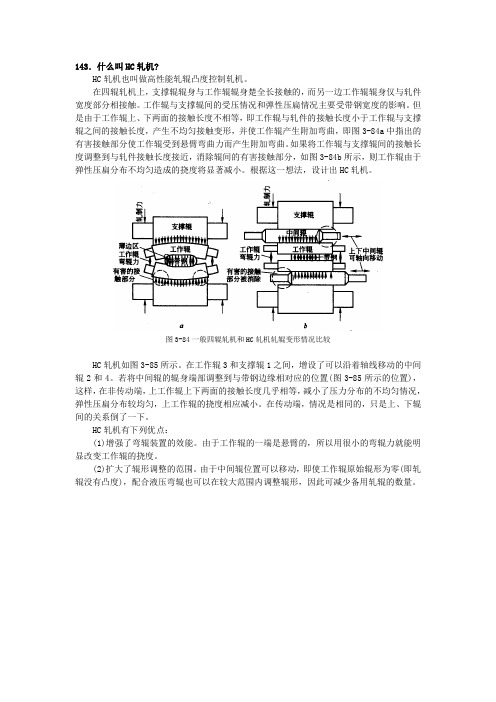
143.什么叫HC轧机?HC轧机也叫做高性能轧辊凸度控制轧机。
在四辊轧机上,支撑辊辊身与工作辊辊身楚全长接触的,而另一边工作辊辊身仅与轧件宽度部分相接触。
工作辊与支撑辊间的受压情况和弹性压扁情况主要受带钢宽度的影响。
但是由于工作辊上、下两面的接触长度不相等,即工作辊与轧件的接触长度小于工作辊与支撑辊之间的接触长度,产生不均匀接触变形,并使工作辊产生附加弯曲,即图3-84a中指出的有害接触部分使工作辊受到悬臂弯曲力而产生附加弯曲。
如果将工作辊与支撑辊间的接触长度调整到与轧件接触长度接近,消除辊间的有害接触部分,如图3-84b所示,则工作辊由于弹性压扁分布不均匀造成的挠度将显著减小。
根据这一想法,设计出HC轧机。
图3-84一般四辊轧机和HC轧机轧辊变形情况比较HC轧机如图3-85所示。
在工作辊3和支撑辊1之间,增设了可以沿着轴线移动的中间辊2和4。
若将中间辊的辊身端部调整到与带钢边缘相对应的位置(图3-85所示的位置),这样,在非传动端,上工作辊上下两面的接触长度几乎相等,减小了压力分布的不均匀情况,弹性压扁分布较均匀,上工作辊的挠度相应减小。
在传动端,情况是相同的,只是上、下辊间的关系倒了一下。
HC轧机有下列优点:(1)增强了弯辊装置的效能。
由于工作辊的一端是悬臂的,所以用很小的弯辊力就能明显改变工作辊的挠度。
(2)扩大了辊形调整的范围。
由于中间辊位置可以移动,即使工作辊原始辊形为零(即轧辊没有凸度),配合液压弯辊也可以在较大范围内调整辊形,因此可减少备用轧辊的数量。
图3-85 HC轧机结构简图1-支撑辊;2-上中间辊;3-工作辊;4-下中闻辊;5-工作辊正弯曲液压缸(3)带钢板形稳定性好。
实践表明,当中间辊调整到某一位置时,轧制力波动和张力变化对板形的影响很小。
这样,可减小冷轧张力,也能控制良好的板形,并减少了板形控制的操作次数。
(4)可以显著提高带钢平直度,可以减小带钢边部变薄和裂边部分的宽度,减少切边损失。
造纸机最全的顶网的结构、原理与安装知识
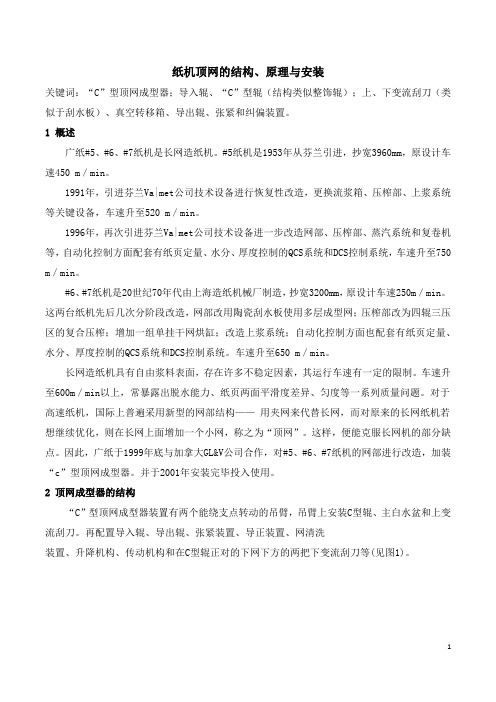
纸机顶网的结构、原理与安装关键词:“C”型顶网成型器;导入辊、“C”型辊(结构类似整饰辊);上、下变流刮刀(类似于刮水板)、真空转移箱、导出辊、张紧和纠偏装置。
1 概述广纸#5、#6、#7纸机是长网造纸机。
#5纸机是1953年从芬兰引进,抄宽3960mm,原设计车速450 m/min。
1991年,引进芬兰Va|met公司技术设备进行恢复性改造,更换流浆箱、压榨部、上浆系统等关键设备,车速升至520 m/min。
1996年,再次引进芬兰Va|met公司技术设备进一步改造网部、压榨部、蒸汽系统和复卷机等,自动化控制方面配套有纸页定量、水分、厚度控制的QCS系统和DCS控制系统,车速升至750 m/min。
#6、#7纸机是20世纪70年代由上海造纸机械厂制造,抄宽3200mm,原设计车速250m/min。
这两台纸机先后几次分阶段改造,网部改用陶瓷刮水板使用多层成型网;压榨部改为四辊三压区的复合压榨;增加一组单挂干网烘缸;改造上浆系统;自动化控制方面也配套有纸页定量、水分、厚度控制的QCS系统和DCS控制系统。
车速升至650 m/min。
长网造纸机具有自由浆料表面,存在许多不稳定因素,其运行车速有一定的限制。
车速升至600m/min以上,常暴露出脱水能力、纸页两面平滑度差异、匀度等一系列质量问题。
对于高速纸机,国际上普遍采用新型的网部结构——用夹网来代替长网,而对原来的长网纸机若想继续优化,则在长网上面增加一个小网,称之为“顶网”。
这样,便能克服长网机的部分缺点。
因此,广纸于1999年底与加拿大GL&V公司合作,对#5、#6、#7纸机的网部进行改造,加装“c”型顶网成型器。
并于2001年安装完毕投入使用。
2 顶网成型器的结构“C”型顶网成型器装置有两个能绕支点转动的吊臂,吊臂上安装C型辊、主白水盆和上变流刮刀。
再配置导入辊、导出辊、张紧装置、导正装置、网清洗装置、升降机构、传动机构和在C型辊正对的下网下方的两把下变流刮刀等(见图1)。
皮带机张紧滚筒工作原理
皮带机张紧滚筒工作原理
皮带机张紧滚筒的工作原理主要包括两个方面:张紧机构和滚筒。
1. 张紧机构:张紧机构通过调节张紧滚筒的位置,使皮带保持适当的张力。
通常有两种常见的张紧机构。
- 手动张紧机构:可以通过手动杠杆或螺栓等方式调节张紧滚
筒的位置,从而改变皮带的张力。
- 自动张紧机构:根据皮带的张力变化自动调节张紧滚筒的位置。
主要有张紧滚轮、张紧滚轮座、张紧弹簧、张紧杆等组成。
当皮带张力增大时,张紧滚轮会被压缩,张紧滚筒向前移动,从而减小皮带的张力;当皮带张力减小时,张紧滚轮会松弛,张紧滚筒向后移动,增加皮带的张力。
2. 滚筒:滚筒是皮带机的重要组成部分,其作用是支撑和拉动皮带运动。
张紧滚筒是滚筒中的一种特殊滚筒,与其他滚筒不同,它通过调节位置来改变皮带的张力。
当皮带机开始工作时,张紧滚筒会在张紧机构的作用下自动调节位置,使皮带保持适当的张力。
然后,滚筒开始转动,通过摩擦力将物料从一个位置输送到另一个位置。
整个过程中,张紧滚筒会根据皮带的运动情况随时调整位置,保持皮带的张紧度。
31-给煤机给煤率反馈波动(或偏差)大的分析(肖榕辉)
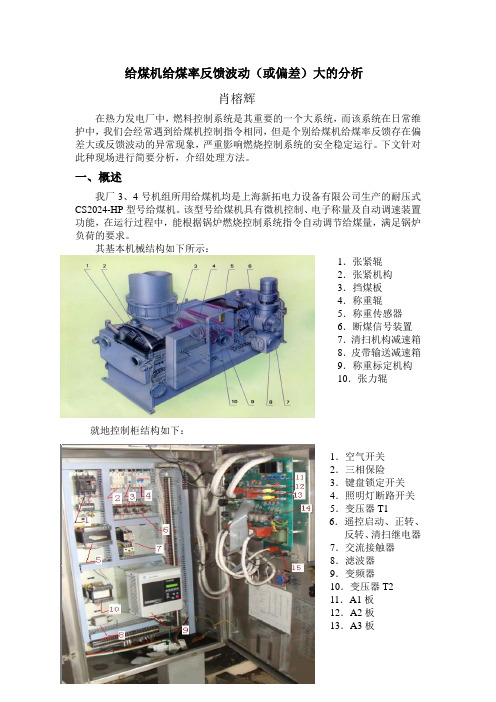
给煤机给煤率反馈波动(或偏差)大的分析肖榕辉在热力发电厂中,燃料控制系统是其重要的一个大系统,而该系统在日常维护中,我们会经常遇到给煤机控制指令相同,但是个别给煤机给煤率反馈存在偏差大或反馈波动的异常现象,严重影响燃烧控制系统的安全稳定运行。
下文针对此种现场进行简要分析,介绍处理方法。
一、概述我厂3、4号机组所用给煤机均是上海新拓电力设备有限公司生产的耐压式CS2024-HP型号给煤机。
该型号给煤机具有微机控制、电子称量及自动调速装置功能,在运行过程中,能根据锅炉燃烧控制系统指令自动调节给煤量,满足锅炉负荷的要求。
其基本机械结构如下所示:1.张紧辊2.张紧机构3.挡煤板4.称重辊5.称重传感器6.断煤信号装置7.清扫机构减速箱8.皮带输送减速箱9.称重标定机构10.张力辊就地控制柜结构如下:1.空气开关2.三相保险3.键盘锁定开关4.照明灯断路开关5.变压器T16.遥控启动、正转、反转、清扫继电器7.交流接触器8.滤波器9.变频器10.变压器T211.A1板12.A2板13.A3板14.电源板15.CPU微机板其基本的控制原理:该称重式给煤机控制的物理量是燃料的流量(即给煤率,单位是吨/每小时)。
为实现这一功能,CS2024型给煤机通过称重传感器测量单位皮带长度上煤的重量,同时通过测速发电机测量并换算出皮带的转动速度,二者的乘积得出实际给煤率,与要求给煤率进行比较,然后调节皮带电机的速度,使给煤率控制在指令值上。
二、给煤机控制原理1、原理框图注:INT块作用:当燃料控制自动,在运给煤机放自动时,某台在运给煤机跳闸或停运,将置停运给煤机输出O值为18%,而此时总燃料测量值将减少,燃料主控PID输出O值将变大,该O值作为INT块PID的设定值输入,与6台给煤机输出指令平均值相比较,迅速增大其他给煤机的控制指令,把煤量拉上来。
2、给煤机给煤指令锅炉指令BD对应需求燃料量,经过分离器出口温度的修正,形成燃料控制PID的设定值S,经过热值修正的燃煤测量总量和燃油总量修正后得出的燃料总量作为PID的测量值M,偏差经过PID运算得出燃料控制主站的给煤指令O值,该给煤指令经过INT块修正运算作为每台给煤机的中控指令输出。
自动张紧装置介绍PPT课件
显示系统8
▪ 显示器第8页 光标在“英中对照
”位置按“设置”进 入,记录了变频器的Байду номын сангаас常见故障内容和解决 法案。
变频控制箱
Dscn5921.jpg
变频控制箱样机
隔爆操作箱
张力传感器
参数: DC24V; F:0-150KN; SIG:4-20mA
压力传感器
参数: DC24V; P:0-10MPa; SIG:4-20mA
张紧绞车总图
单向制动器
减速器
滚筒组件
3 液 压 系 统
4 电控部分
电控原理 参数显示器 主要组成部分: 变频控制箱 隔爆操作箱 张力传感器 压力传感器
皮带自动张紧装置工作原理
• 皮带自动张紧装置是一种用来随时控制和调节皮带张力,使 得皮带运输机时刻处于最佳运行状态的自动工作设备。它 通过可编程控制器PLC来精确控制张紧电机的运行转距, 对应给出张紧的最大拉力,与外部张力监测传感器采集的 数据进行比较和补偿,使得实际张力与给出张力相互一致 ,而实现皮带张力适时给定的目的。
显示系统5
▪ 显示器第五页 光标在“保护设置
”位置按“设置”进 入,对各种保护的屏 蔽和确认。
显示系统6
▪ 显示器第六页 在“接口状态”位
置按“设置”进入, 对PLC工作状态进行 直接监视。
显示系统7
▪ 显示器第七页 光标在“故障显示
”位置按“设置”进 入,对现时故障和历 史故障进行记录保存 。
二、变频自动张紧装置介绍 1 系统组成 2 机械传动部分 3 液压系统 4 电控部分 5 工作模式
1 系统组成
张紧绞车 液压系统 变频控制箱 操作箱 传感器
2 机械传动部分
主要组成部分 防爆电机:55Kw n=1485r/min 单向制动器:FL450 减速器:EC3400MN i=80.5 滚筒组件
CRP170120辊压机机械部分图纸
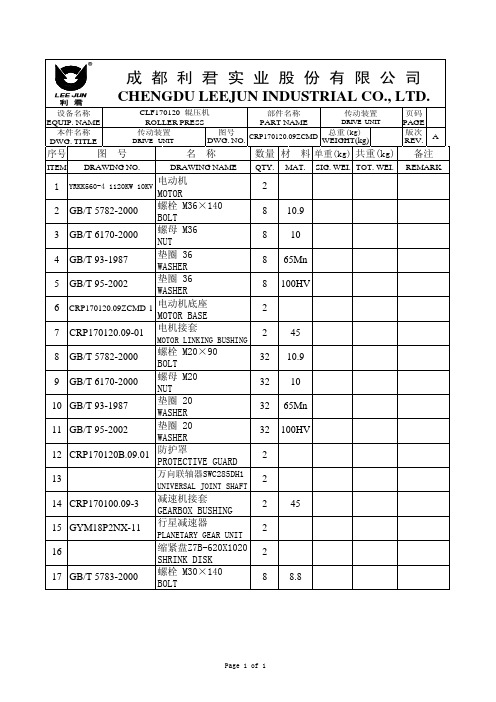
活动端外侧端盖OUTER FLANGE OF MOVING END 螺栓 M24×80BOLT 弹垫 24WASHER 平垫 24WASHER 轴承(241/750 CAK30/C3/W33)BEARING(241/750 CAK30/C3/W33)热电阻WZPM-201特THERMOCOUPLE WZPM-201螺 塞 M60×2SCREW PLUG 垫圈 60×68WASHER 轴承座BEARING HOUSING VE型密封圈(φ820)VE SEAL RING 螺栓 M10×40BOLT 外侧密封圈挡板DAM BOARD OF OUTER SEAL RING 油杯 45° M10×1GREASE CUP 组合密封垫10SEAL WASHER 内侧密封圈挡板DAM BOARD OF INNER SEAL RING 螺 塞 M18×1.5SCREW PLUG 垫圈 18×22WASHER 内侧密封圈隔板INNER SEAL RING DIAPHRAGM 密封圈固定环RETAINING RING OF SEAL RING VE型密封圈(φ870)VE SEAL RING 螺栓 M16×45BOLT 弹垫 16WASHERSHAFT φ870SHAFT φ8108.865Mn COPPER 45Q2354535ZG310-57010.94535COPPER ZG310-57010.965Mn 100HV 2162844222222226164822214848GB/T5782-2000GB/T93-1987JB/ZQ4454-1997CRP170100.02B-07CRP20080.02-14JB/T7940.2-1995GB/T982-1977CRP20080.02-12JB/ZQ4444-1997CRP170120.02C-08B GB/T5782-2000CRP170100.02B-06JB/ZQ4444-1997JB/ZQ4454-1997CRP170100.02B-05GB/T5782-2000GB/T93-1987GB/T95-200237383933343536293031322526272821222324181920平垫 16WASHER 螺塞 M14×1.5SCREW PLUG 垫圈 14×18WASHER 垫块BACK-UP PLATE 螺栓 M16×30BOLT 螺塞 M10×1SCREW PLUG 垫圈 10×13.5WASHER 调整垫ADJUST WASHER 螺栓 M10×25BOLT 管箍二HOOP 支架二SUPPORT 螺钉 M6×20BOLT 螺母 M6NUT 弹垫 16WASHER 锥密封棉线编织软管总成 DN32,M52×2 TUBE O型密封圈 34.5×3.55SEAL RING 焊接锥接头DN32TIE-IN 锥密封棉线编织软管总成 DN25,M42×2 TUBE O型密封圈 26.5×3.55SEAL RING 焊接锥接头DN25TIE-IN 管箍一HOOP 支架一SUPPORT NBR 20Q235Q235NBR 20Q2358.8865Mn COPPER 8.8Q235COPPER Q2358.835100HV 3522442282842216822416101041216GB/T 3452.1-1992JB/T 6144.5-1992CRP14080.02D-15CRP14080.02D-16JB/T 6143.1-1992GB/T 3452.1-1992JB/T 6144.5-1992JB/T 6143.1-1992CRP14080.02D-14GB/T 70.1-2000GB/T 6170-2000GB/T93-1987JB/ZQ4454-1997CRP170100.02B-08GB/T5783-2000CRP200160.02B-17JB/ZQ4454-1997CRP170120.02C-18GB/T70.1-2000JB/ZQ4444-1997GB/T95-2002JB/ZQ4444-199761575859605354555649505152454647484142434440焊接式端直通管接头D0=34,M33×2TIE-IN 组合密封垫 33SEAL WASHER O型密封圈 29×3SEAL RING 直角焊接接头D0=34TIE-IN 异径接头 A系列 DN32×25TIE-IN 焊接式直角管接头 D0=42TIE-IN 无缝钢管 D0=42,t=4.5SEAMLESS TUBE O型密封圈 34×3SEAL RING 外侧水箱上压盖OUTER COVER 内侧水箱上压盖INNER COVER 无缝钢管 D0=34,t=3.5SEAMLESS TUBE 外侧水箱下压盖OUTER COVER 内侧水箱下压盖INNER COVER 螺钉 M8×25BOLT 弹垫 16WASHER 圆橡胶条 A5±0.20 硬度邵尔A70RUBBER Q2358.865Mn NBRQ235Q23520Q235202020NBR 20NBR 2082217682m 220.5m 8222m 888CRP170120.02D-04GB/T 70.1-2000GB/T93-1987JB/ZQ4609-2006CRP170120.02D-01CRP170120.02D-02GB/T 8163-1999CRP170120.02D-03GB/T 12459-1990GB/T 971-1997GB/T 8163-1999GB/T 966-1997JB/T 982-1977GB/T 979-199777737475766970717265666768626364活动端外侧端盖OUTER FLANGE OF MOVING END 螺栓 M24×80BOLT 弹垫 24WASHER 平垫 24WASHER 轴承(241/750 CAK30/C3/W33)BEARING(241/750 CAK30/C3/W33)热电阻WZPM-201特THERMOCOUPLE WZPM-201螺 塞 M60×2SCREW PLUG 垫圈 60×68WASHER 轴承座BEARING HOUSING VE型密封圈(φ820)VE SEAL RING 螺栓 M10×40BOLT 外侧密封圈挡板DAM BOARD OF OUTER SEAL RING 油杯 45° M10×1GREASE CUP 组合密封垫10SEAL WASHER 内侧密封圈挡板DAM BOARD OF INNER SEAL RING 螺 塞 M18×1.5SCREW PLUG 垫圈 18×22WASHER 内侧密封圈隔板INNER SEAL RING DIAPHRAGM 密封圈固定环RETAINING RING OF SEAL RING VE型密封圈(φ870)VE SEAL RING 螺栓 M16×45BOLT 弹垫 16WASHERSHAFT φ870SHAFT φ810Q235-A 8.865Mn 4535COPPER 4510.94535COPPER ZG310-57065Mn 100HV ZG310-57010.92161644222222226164822214848CRP20080.02-14GB/T5782-2000GB/T93-1987CRP20080.02-12JB/ZQ4444-1997JB/ZQ4454-1997CRP170100.02B-07GB/T5782-2000CRP170100.02B-06JB/T7940.2-1995GB/T982-1977JB/ZQ4444-1997JB/ZQ4454-1997CRP170120.02C-08B GB/T93-1987GB/T95-2002CRP170100.02B-05GB/T5782-200037383933343536293031322526272821222324181920平垫 16WASHER 螺塞 M14×1.5SCREW PLUG 垫圈 14×18WASHER 螺塞 M10×1SCREW PLUG 垫圈 10×13.5WASHER 调整垫ADJUST WASHER 螺栓 M10×25BOLT 管箍二HOOP 支架二SUPPORT 螺钉 M6×20BOLT 螺母 M6NUT 弹垫 16WASHER 锥密封棉线编织软管总成 DN32,M52×2 TUBE O型密封圈 34.5×3.55SEAL RING 焊接锥接头DN32TIE-IN 锥密封棉线编织软管总成 DN25,M42×2 TUBE O型密封圈 26.5×3.55SEAL RING 焊接锥接头DN25TIE-IN 管箍一HOOP 支架一SUPPORT 焊接式端直通管接头D0=34,M33×2TIE-IN 组合密封垫 33SEAL WASHER20NBR 20Q235-A Q235-A NBR 20Q235-A 8.8865Mn COPPER 8.8Q235-A 100HV 35COPPER 3584228842416828241622662216GB/T 966-1997JB/T 982-1977GB/T 3452.1-1992JB/T 6144.5-1992CRP14080.02D-15CRP14080.02D-16JB/T 6143.1-1992GB/T 3452.1-1992JB/T 6144.5-1992JB/T 6143.1-1992CRP14080.02D-14GB/T 70.1-2000GB/T 6170-2000GB/T93-1987JB/ZQ4454-1997CRP170100.02B-08GB/T5783-2000CRP200160.02B-17GB/T95-2002JB/ZQ4444-1997JB/ZQ4454-1997JB/ZQ4444-199761575859605354555649505152454647484142434440O型密封圈 29×3SEAL RING 直角焊接接头D0=34TIE-IN 异径接头 A系列 DN32×25TIE-IN 焊接式直角管接头 D0=42TIE-IN 无缝钢管 D0=42,t=4.5SEAMLESS TUBE O型密封圈 34×3SEAL RING 外侧水箱上压盖OUTER COVER 内侧水箱上压盖INNER COVER 无缝钢管 D0=34,t=3.5SEAMLESS TUBE 外侧水箱下压盖OUTER COVER 内侧水箱下压盖INNER COVER 螺钉 M8×25BOLT 弹垫 16WASHER 圆橡胶条 A5±0.20 硬度邵尔A7RUBBER Q235-A 8.865Mn NBRQ235-A Q235-A 20Q235-A 202020NBR NBR 201768820.5m 2222m 2m 2882CRP170120.02D-04GB/T 70.1-2000GB/T93-1987JB/ZQ4609-2006CRP170120.02D-01CRP170120.02D-02GB/T 8163-1999CRP170120.02D-03GB/T 12459-1990GB/T 971-1997GB/T 8163-1999GB/T 979-19977374756970717265666768626364Page 1 of 2防尘圈 II DUSTPROOF RING 螺栓 M8×25BOLT 垫圈 8WASHER 盖板COVER 螺栓 M6×20BOLT 垫圈 6WASHER 垫圈6WASHER 警示牌WARNER 铆钉4×8 RIVET 螺栓 M10×35BOLT 螺母 M10NUT 垫圈 10WASHER 门DOOR 螺栓 M10×25BOLT 垫圈10WASHER 门1DOOR 门2DOOR 265Mn 4.5100HV4.865Mn L2BL24.8100HV Q2354.8100HV 4.83232222224161628444162GB/T5781-2000GB/T93-1987CRP170120.08.01CRP170120.08.02GB/T5781-2000GB/T6170-2000GB/T95-2002CRP180100.08-06GB/T95-2002GB/T93-1987CRP14065.08.01-4GB/T827-1986GB/T5781-2000GB/T93-1987CRP170100.08-08GB/T5783-2000CRP180100.08-053233343528293031242526272021222319Page 2 of 2Page 1 of 1Page 1 of 3干油盒2GREASE BOX 2干油盒支座FOOTSTEP FOR GREASE BOX 挡板BAFFLE 支承板SUPPORT PLATE 橡胶板15×534×1380RUBBER BOARD 止推板THRUST PLATE 紧固件FASTENING PIECE 紧定螺钉TRIP BOLT 活动端防尘板(左,右)各1DUST SHIELD OF FLOATING END (LEFT,RIGHT )EACH 1固定端防尘板(左,右)各1DUST SHIELD OF FIXED END (LEFT,RIGHT )EACH 1吊挂装置ERECTING BY OVERHANG 油缸支承板SUPPORT PLATE FOR HYDROCYLINDER 垫圈16WASHER 螺母 M30NUT 垫圈 30WASHER 螺栓M30×430BOLT 螺栓M30×380BOLT 螺栓M30×250BOLT 沉头螺钉 M20×60DORMANT BOLT 螺栓M20×75BOLT 螺栓M20×210BOLT 垫圈 20WASHER 垫圈 20WASHER 螺母 M20NUT8.8100HV 65Mn 88.88.88.88.8100HV 8100HV 8.8Q235RUBBER Q23545Q23584885656122048762416080244448222GB/93-1987GB/T6170-2000GB/T70.1-2000GB/T5782-2000GB/T5782-2000GB/95-2002GB/95-2002GB/T5782-2000GB/T5782-2000GB/T5782-2000CRP170100.01-24CRP170100.01-25GB/95-2002GB/T6170-2000CRP170100.01-20CRP170100.01-21CRP170100.01-22CRP170100.01-23CRP170100.01-17CRP170100.01-18CRP170100.01-19CRP170100.01-15CRP170100.01-16414243373839403334353629303132252627282122232420Page 2 of 3螺栓M10×25BOLT 垫圈 10WASHER 螺栓 M16×40BOLT 垫圈 16WASHER 吊环螺钉 M20EYEBOLT 垫圈BACK UP PLATE 活动端端部件(左)HEAD END OF FLOATING END (LEFT )固定端端部件(左)HEAD END OF FIXED END (LEFT )垫块1BLOCK1垫块2BLOCK2螺栓 M16×90BOLT 垫块1BLOCK1螺栓 M16×80BOLT 挡板2BAFFLE28.8Q235Q235Q2358.8Q235Q2358.865Mn 8.8100HV 48413248323161262616GB/T5782-2000CRP170100.01-29GB/T5782-2000CRP170100.01-27CRP170100.01.03CRP170100.01.04CRP20080.01-23CRP180120.01-9GB/T5783-2000GB/95-2002GB/825-1988CRP170100.01-26GB/T5783-2000GB/93-19875753545556495051524546474844Page 3 of 3Page 1 of 3挡销板BAFFLE OF PIN 螺栓 M10×20BOLT 弹垫 10WASHER 顶杆I MANDRIL I 侧盖板LATERAL COVER PLATE 喂料管延伸板1FEED DUCT EXTENSION WALL 调节板支座REGULATING PLATE FOOTSTEPT 销轴 B60×140AXLE PIN 垫板3BACK UP PLATE 垫板1BACK UP PLATE 螺栓 M16×70BOLT 弹垫 16WASHER 平垫 16WASHER 螺栓 M20×100BOLT 螺母 M20NUT 弹垫 20WASHER平垫 20WASHER喂料管延伸板 2FEED DUCT EXTENSION WALL 顶杆II MANDRIL II 螺母 M36NUT 保险挡块ARRESTING STOP 套管 18Q2354565Mn 100HV 4565Mn 100HV 8.8845Q235Q2358.845Q2358.865Mn 12642424128824844484214488GB/T6170-2000CRP14065.04-37CRP180120B 04B 08GB/T93-1987GB/T95-2002CRP170120.04C-02CRP170120.04C-14GB/T93-1987GB/T95-2002GB/T5782-2000GB/T6170-2000GB/T882-2000CRP170120.04C-06CRP170120.04C-07GB/T5782-2000CRP20060.04B-04CRP170120.04C-11CRP170120.04C-02CRP200120.04E-07CRP200120.04E-11GB/T5782-2000GB/T93-198737383933343536293031322526272821222324181920Page 2 of 3BUSHING螺母 M24NUT弹垫 24WASHER平垫 24WASHER挡片BLOCK SHEET蝶形弹簧B125-2DISH SPRING双头螺柱 M24×220DOUBLE-SCREW BOLT弧形板 1CAMBERED PLATE蝶形弹簧A 125-3DISH SPRING套管 2BUSHING螺栓 M8×30BOLT弹垫 8WASHER销轴 B10×40AXLE PIN平垫 10WASHER开口销 3.2×20SPLIT PIN 3.2×20观察门INSPECTION DOOR Q2358.865Mn 45100HV 35Q2354565Mn 100HV Q2354588444881261221212624412GB/T91-2000CRP170120.04C-03GB/T5782-2000GB/T93-1987GB/T882-2000GB/T95-2002GB/T901-1988CRP20060.04B-13GB/T1972-1992CRP180120B.04B-09GB/T93-1987GB/T95-2002CRP170100.04-19GB/T1972-1992CRP180120B.04B-08GB/T6170-200053544950515245464748414243443940Page 3 of 3标 题 栏Page1 of 1Page 1 of 1。
张紧轮工作原理
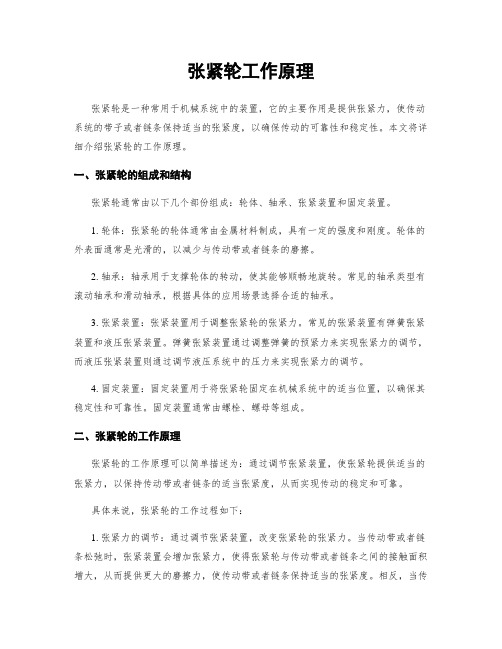
张紧轮工作原理张紧轮是一种常用于机械系统中的装置,它的主要作用是提供张紧力,使传动系统的带子或者链条保持适当的张紧度,以确保传动的可靠性和稳定性。
本文将详细介绍张紧轮的工作原理。
一、张紧轮的组成和结构张紧轮通常由以下几个部份组成:轮体、轴承、张紧装置和固定装置。
1. 轮体:张紧轮的轮体通常由金属材料制成,具有一定的强度和刚度。
轮体的外表面通常是光滑的,以减少与传动带或者链条的磨擦。
2. 轴承:轴承用于支撑轮体的转动,使其能够顺畅地旋转。
常见的轴承类型有滚动轴承和滑动轴承,根据具体的应用场景选择合适的轴承。
3. 张紧装置:张紧装置用于调整张紧轮的张紧力。
常见的张紧装置有弹簧张紧装置和液压张紧装置。
弹簧张紧装置通过调整弹簧的预紧力来实现张紧力的调节,而液压张紧装置则通过调节液压系统中的压力来实现张紧力的调节。
4. 固定装置:固定装置用于将张紧轮固定在机械系统中的适当位置,以确保其稳定性和可靠性。
固定装置通常由螺栓、螺母等组成。
二、张紧轮的工作原理张紧轮的工作原理可以简单描述为:通过调节张紧装置,使张紧轮提供适当的张紧力,以保持传动带或者链条的适当张紧度,从而实现传动的稳定和可靠。
具体来说,张紧轮的工作过程如下:1. 张紧力的调节:通过调节张紧装置,改变张紧轮的张紧力。
当传动带或者链条松弛时,张紧装置会增加张紧力,使得张紧轮与传动带或者链条之间的接触面积增大,从而提供更大的磨擦力,使传动带或者链条保持适当的张紧度。
相反,当传动带或者链条过紧时,张紧装置会减小张紧力,以减少磨擦力,使传动带或者链条松弛。
2. 张紧力的传递:张紧轮的轮体通过轴承支撑,当张紧力作用在轮体上时,轮体味受到力的作用而旋转。
张紧轮的旋转会使传动带或者链条产生张紧力,从而保持传动带或者链条的张紧度。
3. 张紧轮的稳定性:通过固定装置将张紧轮固定在机械系统中的适当位置,以确保张紧轮的稳定性。
固定装置的设计和安装要求合理,以确保张紧轮在工作过程中不会发生松动或者脱落,从而保证传动系统的稳定性和可靠性。
托辊式带式输送机中不同张紧装置的原理
托辊式带式输送机中不同张紧装置的原理下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!I. 引言托辊式带式输送机是一种常用的物料输送设备,其带式传动系统的正常工作需要张紧装置正确运转。
两种张紧辊负荷平衡控制原理及差异分析

两种张紧辊负荷平衡控制原理及差异分析张紧辊负荷平衡控制张力分布强制等比例1引言在钢铁企业板带生产机组中,带钢张力很多是需要分段进行控制的,这不但是通板的需要,更是工艺控制的要求。
带钢张力控制设备的实现一般是采用张力辊组完成,即由2-4根辊子构成张紧辊组,分别由马达传动每一根辊子,实现张紧辊组前后不同的张力控制要求。
在张力控制过程中张紧辊组有一个重要控制内容,就是各个辊子之间的负荷平衡控制。
所谓张紧辊负荷平衡控制就是使各个张紧辊的负荷尽可能相近或满足一定比例的分配,以使各辊子都能发挥各自的能力,协同完成带钢的张力控制要求,防止出现某个辊子过负荷而其它辊子还没充分发挥作用的现象出现。
在实际应用中,张紧辊负荷平衡控制一般有两种方式,一种是较复杂的“仿皮带”负荷平衡控制方式,一种是强制等比例的负荷平衡控制方式。
下面我们将就这两种控制方式的原理进行说明,并对他们的差异加以分析比较。
2“仿皮带”负荷平衡控制2.1控制原理“仿皮带”负荷平衡控制方式,其基本思路是模仿皮带传动控制,依据的数学控制模型就是我们称为的皮带传动控制欧拉定理。
图1 BOD的物理结构及表示符号欧拉定理简单说明如下:图1中主动轮的旋转方向如箭头所示,传动时皮带上下两边的张力就有差异,上边紧一些(叫紧边),下边松一些(叫松边)。
忽略张力损失,则(T1=T4) > (T2=T3)。
欧拉定理说的是:如果要保证主动轮与皮带无滑动地传动,主动轮紧边的张力要保证满足下面的公式:(1)式中:e为自然对数;θ为皮带与主动轮的接触弧长;ξ为皮带与主动轮的摩擦系数。
也就是说主动轮能够提供的紧边最大张力为:(2)以某个4辊式张紧辊为例,其张力分布如图2所示。
图2 4辊式张紧辊张力分布示意图一般来说TENT与TDEL总是有差异的,假设TDEL>TENT。
则按照欧拉定理其传动也应符合式(1)的要求。
因此,“仿皮带”负荷平衡控制就采用下面的公式:(3)(4)而马达的功率需求公式为:(5)所以:(6)设马达的额定功率分别为P1M、P2M、P3M、P4M。
富乐公司辊压机扭力支撑原理图

富乐公司的扭力支承的原理图
d 国内某单位设计的一种扭力支承装置,图2-21。
图2-21 扭力支承的原理图
这种平衡装置采用一个平行四连杆机构及弹簧系统,利用两台减速器输出转矩相反的特点,两台减速器在底板上平衡。
平行四连杆机构解决活动辊的水平位移问题,弹簧系统补偿垂直方向的微小位移。
5)检测系统:辊压机因有较高的可靠性要求,对关键参数和元件进行连续检测,并与控制系统联锁实现自动控制。
除电气方面的检测外,主要有如下检测内容:
①辊缝间隙的检测与控制;
②辊缝设定极限的检测与报警;
③主轴承温度的检测与控制;
④减速器润滑油温度的检测与控制;
⑤液压系统油压的检测与控制;
⑥干油泵站储脂量的检测与报警;
⑦润滑系统工作状况的检测与报警;
⑧冷却站工作状况的检测与报警;
6)冷却系统:辊压机主要有下列冷却内容:
①主轴承的冷却:共有四个进水口和四个出水口;即每个轴承座上各有一个进水口和一个出水口。
②挤压辊的冷却:每个挤压辊配备一个旋转接头,上边同时设置有进出水口;
③减速器的冷却:每台减速器配有一个冷却站,其上设置有进出水口;
(2)国际上辊压机的构造情况:
1)德国伯力鸠斯公司辊压机,如图2-22所示。
图2-22 德国伯力鸠斯公司辊压机
1. 喂料装置
2. 液压系统
3. 挤压辊装配
4. 机架装配
5. 传动系统2) 德国洪堡公司辊压机,如图2-23~24所示。
1. 传动系统
2. 机架装配
3. 挤压辊装配。
张紧辊传动接手结构分析与选型
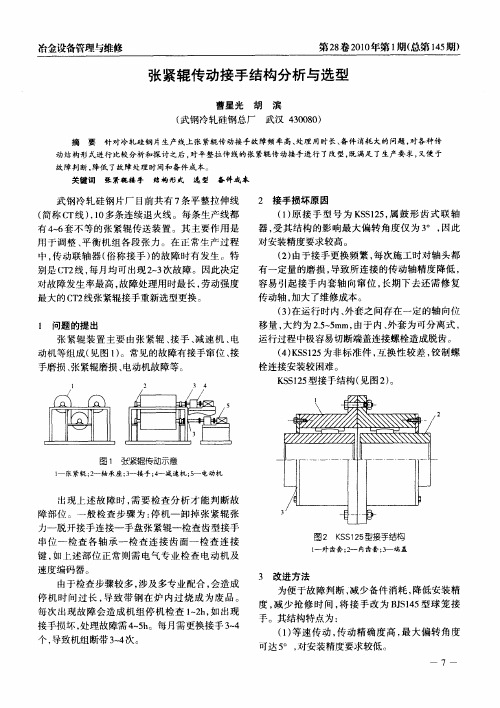
动 机等组 成 ( 见图 1。常 见 的故障有 接 手窜位 、 ) 接
有一定量的磨损 , 导致所连接的传动轴精度降低 , 容易引起接手内套轴向窜位 , 长期下去还需修复 传 动轴 , 加大 了维修成 本 。 ( ) 运行 时 内 、 套之 间存 在一 定 的轴 向位 3在 外 移量 , 大约 为 2 ~mm, .5 5 由于 内 、 外套 为 可分 离式 , 运行 过程 中极 容易切 断端盖 连接螺栓造 成脱齿 。 ( ) S 15 4 K S 2 为非 标 准件 , 换性 较差 , 互 铰制 螺
l 外 齿 套 ;一 内齿 套 ;一 端 盖 一 2 3
出现 上 述故 障 时 , 要 检 查分 析 才 能 判断 故 需 障部 位 。一 般 检 查步 骤 为 : 机一 卸 掉 张 紧辊 张 停 力一脱 开接 手连 接一 手盘 张 紧辊 一 检查 齿型 接手 串位 一 检 查 各 轴 承一 检查 连 接 齿 面一 检 查 连 接 键 , 上述 部位 正常 则需 电气 专业 检 查 电 动机 及 如
每次 出现 故 障会 造 成 机组 停 机检 查 12 , 出现 —h如 接 手损坏 , 处理故 障需 4 5 。每月需 更换接 手 34 —h -
个, 导致机组断带 34 ~ 次。
() 1等速传动 , 传动精确度高 , 最大偏转角度 可 达 5 , 安装精 度要求较 低 。 。 对
— —
栓连 接安装较 困难 。
K S 2 型接 手结构 ( 图2 。 S 15 见 )
手磨损 、 张紧辊磨损 、 电动机故障等。
一
图 1 张紧辊传动示意
l 张 紧辊 ;一 轴 承 座 ;一 接 手 ;一 减 速 杌 ;一 电 动机 一 2 3 4 5
S50MC-C结构说明书-链轮传动机构
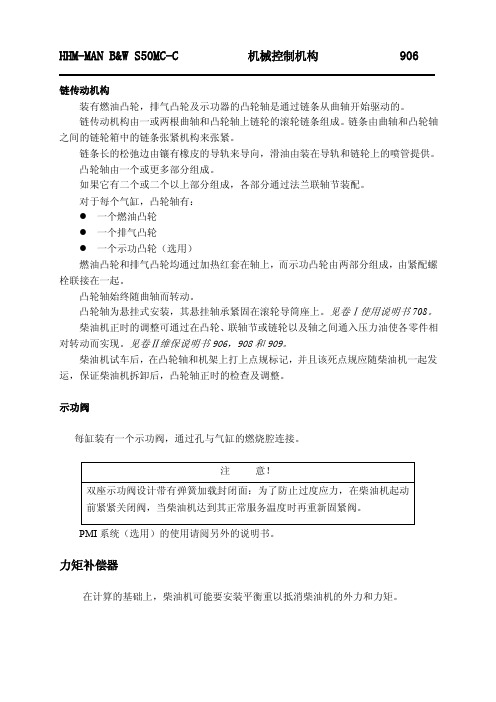
HHM-MAN B&W S50MC-C 机械控制机构 906链传动机构装有燃油凸轮,排气凸轮及示功器的凸轮轴是通过链条从曲轴开始驱动的。
链传动机构由一或两根曲轴和凸轮轴上链轮的滚轮链条组成。
链条由曲轴和凸轮轴之间的链轮箱中的链条张紧机构来张紧。
链条长的松弛边由镶有橡皮的导轨来导向,滑油由装在导轨和链轮上的喷管提供。
凸轮轴由一个或更多部分组成。
如果它有二个或二个以上部分组成,各部分通过法兰联轴节装配。
对于每个气缸,凸轮轴有:●一个燃油凸轮●一个排气凸轮●一个示功凸轮(选用)燃油凸轮和排气凸轮均通过加热红套在轴上,而示功凸轮由两部分组成,由紧配螺栓联接在一起。
凸轮轴始终随曲轴而转动。
凸轮轴为悬挂式安装,其悬挂轴承紧固在滚轮导筒座上。
见卷Ⅰ使用说明书708。
柴油机正时的调整可通过在凸轮、联轴节或链轮以及轴之间通入压力油使各零件相对转动而实现。
见卷Ⅱ维保说明书906,908和909。
柴油机试车后,在凸轮轴和机架上打上点规标记,并且该死点规应随柴油机一起发运,保证柴油机拆卸后,凸轮轴正时的检查及调整。
示功阀每缸装有一个示功阀,通过孔与气缸的燃烧腔连接。
PMI系统(选用)的使用请阅另外的说明书。
力矩补偿器在计算的基础上,柴油机可能要安装平衡重以抵消柴油机的外力和力矩。
HHM-MAN B&W S50MC-C 机械控制机构 906一次力矩补偿器用于4缸机。
一次力矩补偿器被布置成在曲轴两端的位置可调的平衡重。
或者一次力矩补偿器也可布置在主链传动中,这种力矩补偿器包括一带平衡配重的(新)链条张紧轮和随曲轴旋转的平衡重。
二次力矩补偿器用于4-5和6缸机。
二次力矩补偿器被布置成在主链传动中的平衡重。
在某些柴油机上,平衡重置于二次链传动中,从曲轴的对立端传动。
这种链传动装有一带有液压减振器的弹簧加载的链条张紧装置。
或者在柴油机外也能装一只电动力矩补偿器。
四次力矩补偿器四次力矩补偿器被布置成在凸轮轴两端的链传动中。
链条传动张紧方式图集

采用液压块与导板相结合的形式,减振效果好, 适用于高速场合,如发动机的正时链传动
file:///C:/Users/topworld/Desktop/GZZZ/JXSCDZB/base/jxgcsdzsc/36-02/36-02_ykys... 2016/8/20
页码,2/2
承 托
托板和托架 装 置
张紧辊轮常用于垂直或接近于垂直的链传动其直径可取为0607dd为小链轮直径挂重调节液压调节采用液压块与导板相结合的形式减振效果好适用于高速场合如发动机的正时链传动页码122016820file
张紧装置示例
类型 张紧调节形式
定 期
螺纹件调节 张 紧
定 期
偏心调节 张 紧
弹簧调节
自 动
挂重调节 张 紧
液压调节
适用于中心距较大的场合,托板上可衬以软钢、 塑料 或 耐油 橡 胶。滚 子 可在 其上 滚 动; 更 大中 心距 时,托板可以分成两段,借中间6~10节链条的自重 下垂张紧
file:///C:/Users/topworld/Desktop/GZZZ/JXSCDZB/base/jxgcsdzsc/36-02/36-02_ykys... 2016/8/20简 Nhomakorabea图
页码,1/2
说明
可采用细牙螺纹件并带锁紧螺母
张紧轮一般布置在链条松边,根据需要可以靠近 小链轮或大链轮,或者布置在中间位置。张紧轮可以 是链轮或辊轮。张紧链轮的齿数常等于小链轮齿数。 张紧辊轮常用于垂直或接近于垂直的链传动,其直径 可取为(0.6~0.7)d,d为小链轮直径
张紧轮一般布置在链条松边,根据需要可以靠近 小链轮或大链轮,或者布置在中间位置。张紧轮可以 是链轮或辊轮。张紧链轮的齿数常等于小链轮齿数。 张紧辊轮常用于垂直或接近于垂直的链传动,其直径 可取为(0.6~0.7)d,d为小链轮直径
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Pay-off P1 Ia1 Nb1 N1 Gr1 Dm1 POR_D Dmax1 Tm1
J1
Reel 30 78 500
2000 26.15 508
2000
나. Tension Current Caculation - Torque 상수(TC) 3000 * P1 TC = πNb1 Ia1
: (N1 < Nb1) 일경우
Mecanical Loss
Speed(rpm)
Tension On
Tin : BR2 Tension(kg) : Entry Looper Tension Set Ta : BR2_1 和 BR2_2 之间的张力 Tension(kg) Tout : BR2 Tension(kg) : Pre-Cocess Tension Set A: BR2_1 Motor 与 Strip 接触的角度 Alpha(Degree) B: BR2_2 Motor 与 Strip 接触的角度 Beta(Degree) μ0 : 摩擦力 Ta = Tin x exp[(A x π x μ0)/180 ] -------------- ① Tout = Tin x exp[((A+B) x π x μ0)/180 ] ------- ② Tin 和 Tout 是已知值,由 ②可以得知μ0
BR3_1
P1
15.0
Ia1
29.6
N1 1450
GR1 36.75
DBr1 650
J1
BR3_2
P2
11.0
Ia2
42.9
N2
1450
GR2 36.69
DBr2
650
J2
Brake On PLC System
Drive
PI
DBAND
M
Brake
PLG
M
Brake
No. 3 Bridle Roll Control Block Diagram
※ General Data
Power (kw) Rated Current (A)
BR5_1
P1
27
Ia1
52.2
Base Speed (rpm)
N1 1450
Gear Ratio
GR1 36.694
Diameter (m)
Dbr1 650
Inertia moment (Kg.M2) J1
BR5_2
Ramp
mpm →rpm
Gr2 π* Dbr2
Line Speed Ref’(rpm)
Load Shear ΣI
Control
※. General Data
BR1_1
Power (kw) Rated Current (A) Base Speed (rpm)
P1
7.5
Ia1
14.7
N1 1450
Gear Ratio
JF JR
Ramp
0
E-Stop
mpm →rpm
Gr π * Dbr1
Speed Ref’(rpm)
Ramp
-. Bridle Roll Load Shear Control
Tout BR2_2 A Ta
B BR2_1 Tin
X 0.3 Stall Tension
Line Run
Current(A)
Innertia Compensation
Line 减速
X -1 Line 加速
0 Tension Current
μ0 带入 ①式求得 Ta 值. BR2_1 Load : BR2_1L = Ta – Tin BR2_2 Load : BR2_2L = Tout – Ta
3000 * P1 TC1 = πN1 Ia1
Dbr1 * 9.8 * T I1 = 2 * Gr * TC1 * (BR2_1L)
Stall Tension
Line Run
Motor Current Loss
3000 * P1 TC2 = πN2 Ia2
Innertia Compensation
Dbr2 * 9.8 * T I2 = 2 * Gr * TC2 * (BR2_2L)
Control Drive
SC
CC
PI
DBAND
SC
CC
PI
DBAND
PLG
M
Brake
PLG
M
Brake
No. 4 Bridle Roll Control Block Diagram
2 - 20
5. No.5 Bridle Roll Control Block Diagram
` Process Speed Reference (mpm)
P2
17
Ia2
34.6
N2 1450
GR2 36.75
Dbr2 650 J2
BR5_3
P3
11
Ia3
21.3
N3 1450
GR3 37.704
Dbr3 650 J3
Ramp
mpm →rpm
Gr3 π* Dbr3
Line Speed Ref’(rpm)
Brake On
PLC System
Drive
SC
2 - 17
2. No.2 Bridle Roll Control Block Diagram
-. BR Tension Current Caculation
※ General Data
Power (kw) Rated Current (A) Base Speed (rpm) Gear Ratio Diameter (mm) Inertia Moment (Kg.M2)
JOG SPEED (‘+’ mpm)
JOG SPEED (‘-‘ mpm)
JR JF
Ramp
E-Stop
mpm →rpm
Gr1 π * Dbr1
Line Speed Ref’(rpm)
Ramp
mpm →rpm
Gr2 π* Dbr2
Line Speed Ref’(rpm)
Load Shear ΣI
Control
Gr1 π * Dbr1
Line Speed Ref’(rpm)
0 Tension Current
Tension On
Ramp
JOG SPEED (‘+’ mpm)
JOG SPEED (‘-‘ mpm)
JF JR
Ramp
※ General Data
Power (kw) Rated Current (A) Base Speed (rpm) Gear Ratio Diameter (m) Inertia Moment(Kg.M2)
Gr3 π* Dbr3
Line Speed Ref’(rpm)
Brake On PLC System
Drive
SC
CC
PI
DBAND
SC
CC
PI
DBAND
SC
CC
PI
DBAND
PLG
M
Brake
PLG
M
Brake
M
Brake
No. 1 Bridle Roll Control Block Diagram
PLG
M
Brake
PLG
M
Brake
No. 2 Bridle Roll Control Block Diagram
2 - 18
3. No.3 Bridle Roll Control Block Diagram
`
Process Speed
Reference (mpm)
Catenary Position
가. General Data
Power(Kw) Rated Current(A) Base Speed(rpm) Maxium Speed(rpm) Gear Ratio Mandrel Diameter(mm) Actual Diameter(mm) Maxium Diameter Maxium Tension(kg/㎟) Innertia Moment(Kg.m2)
※ General Data
Power (kw) Rated Current (A) Base Speed (rpm) Gear Ratio Diameter (m) Inertia Moment(Kg.M2)
BR6_1
P1
22
Ia1 42.9
N1 1450
GR1 24.545
Dbr1 650
J1
BR6_2
Current(A)
mpm → rpm
Line 减速
X -1 Line 加速
mpm →rpm
Gr π * Dbr2
Speed Ref’(rpm)
Ramp
Tension On
Brake On PLC System
SC
SC
Load Shear Control ΣI
Drive
CC
PI
DBAND
CC
PI
DBAND
Ramp
E-Stop
mpm →rpm
Gr1 π * Dbr1
Line Speed Ref’(rpm)
JOG SPEED (‘+’ mpm)
JOG SPEED (‘-‘ mpm)
JF JR
Ramp
mpm →rpm
Gr2 π* Dbr2
Line Speed Ref’(rpm)
Load Shear ΣIControlB来自2_1P111