无限长单位脉冲响应(IIR)滤波器设计(1)
实验四IIR数字滤波器的设计(1)(2)课案
实验四 IIR 数字滤波器的设计及网络结构一、实验目的1.了解IIR 数字滤波器的网络结构。
2.掌握模拟滤波器、IIR 数字滤波器的设计原理和步骤。
3.学习编写数字滤波器的设计程序的方法。
二、实验内容数字滤波器:是数字信号处理技术的重要内容。
它的主要功能是对数字信号进行处理,保留数字信号中的有用成分,去除信号中的无用成分。
1.数字滤波器的分类滤波器的种类很多,分类方法也不同。
(1)按处理的信号划分:模拟滤波器、数字滤波器 (2)按频域特性划分;低通、高通、带通、带阻。
(3)按时域特性划分:FIR 、IIR2.IIR 数字滤波器的传递函数及特点数字滤波器是具有一定传输特性的数字信号处理装置。
它的输入和输出均为离散的数字信号,借助数字器件或一定的数值计算方法,对输入信号进行处理,改变输入信号的波形或频谱,达到保留信号中有用成分去除无用成分的目的。
如果加上A/D 、D/A 转换,则可以用于处理模拟信号。
设IIR 滤波器的输入序列为x(n),则IIR 滤波器的输入序列x(n)与输出序列y(n)之间的关系可以用下面的方程式表示:1()()()M Ni j i j y n b x n i a y n j ===-+-∑∑(5-1)其中,j a 和i b 是滤波器的系数,其中j a 中至少有一个非零。
与之相对应的差分方程为:10111....()()()1....MM NN b b z b z Y z H Z X z a z a z ----++==++ (5-2)由传递函数可以发现无限长单位冲激响应滤波器有如下特点: (1) 单位冲激响应h(n)是无限长的。
(2) 系统传递函数H(z)在有限z 平面上有极点存在。
(3) 结构上存在着输出到输入的反馈,也就是结构上是递归型的。
3.IIR 滤波器的结构IIR 滤波器包括直接型、级联型和并联型三种结构:① 直接型:优点是简单、直观。
但由于系数bm 、a k 与零、极点对应关系不明显,一个bm 或a k 的改变会影响H(z)所有零点或极点的分布,所以一方面,bm 、a k 对滤波器性能的控制关系不直接,调整困难;另一方面,零、极点分布对系数变化的灵敏度高,对有限字长效应敏感,易引起不稳定现象和较大误差。
无限长单位脉冲响应IIR滤波器的设计方法MATLAB

有源模拟带通滤波器的设计 (10)数字信号处理实验指导实验四、 无限长单位脉冲响应(IIR)滤波器的设计方法(一) 实验目的加深对无限冲激响应( IIR )数字滤波器的常用指标和设计过程的理解。
(二) 实验内容常用函数介绍:1、Matlab 信号处理工具箱中提供了设计巴特沃思模拟滤波器的函数buttord 、buttap 和butter ,格式如下:(1)[,](,,,,C P S P S N W buttord W W R R s ='')用于计算巴特沃思模拟低通滤波器的阶N 和3dB 截止频率Wc (即本书中的符号c Ω)。
其中,Wp 和Ws 分别是滤波器的通带截止频率p Ω和阻止截止频率s Ω,单位为rad/s ;Rp 和Rs 分别是通带最大衰减系数p α和阻带最小衰减系数s α,单位为dB 。
(2)[,,]()z p G buttap N =用于计算N 阶巴特沃思归一化(c Ω=1)模拟低通滤波器系统函数的零、极点和增益因子,返回长度为N 的向量z 和p 分别给出N 个零点和极点,G 是滤波器增益。
得到的滤波器系统函数形式如下:1212()()()()()()()()()a N a a N Q s s z s z s z H s G P s s p s p s p ---==--- 其中,k z 和k p 分别是向量z 和p 的第k 个元素。
如果要从零、极点得到系统函数的分子和分母多项式系数向量B 和A ,可以调用结构转换函数(3)[,]2(,,)B A zp tf z p G =,结构转换后系统函数的形式为111111()()()M M M a N N Nb s b s b B s H s A s a s a s a ----+++==+++其中,M 是向量B 的长度,N 是向量A 的长度,k k b a 和分别是向量B 和A 的第k 个元素。
(3)[,](,,,)C B A butter N W ftype s =''''用于计算巴特沃思模拟滤波器系统函数中分子和分母多项式系数向量B 和A ,其中N 和C W 分别是滤波器的阶和3dB 截止频率c Ω,返回向量B 和A 中的元素k a 和k b 分别是上面的()a H s 表示式中的分母和分子系数。
无限长单位脉冲响应滤波器设计剖析

实验四无限长单位脉冲响应滤波器设计一、实验目的1.掌握双线性变换法及脉冲响应不变法设计IIR数字滤波器的具体设计方法及其原理,熟悉用双线性变换法及脉冲响应不变法设计低通、高通和带通IIR数字滤波器的计算机编程。
2.观察双线性变换及脉冲响应不变法设计的滤波器的频率特性,了解双线性变换法及脉冲响应不变法的特点。
3.熟悉巴特沃思滤波器、切比雪夫滤波器和椭圆滤波器的频率特性。
二、实验原理(1)实验中有关变量的定义:fc通带边界频率,fr阻带边界频率,tao通带波动,at 最小阻带衰减,fs采样频率,t采样周期。
(2)设计一个数字滤波器一般包括以下两步:a.按照任务要求,确定滤波器性能指标b.用一个因果稳定的离散时不变系统的系统函数去逼近这一性能要求(3)数字滤波器的实现:对于IIR滤波器,其逼近问题就是寻找滤波器的各项系数,使其系统函数逼近一个所要求的特性。
先设计一个合适的模拟滤波器,然后变换成满足约定指标的数字滤波器。
用双线形变换法设计IIR数字滤波器的过程:a.将设计性能指标中的关键频率点进行“预畸”b.利用“预畸”得到的频率点设计一个模拟滤波器。
c.双线形变换,确定系统函数三、实验内容1、设计一切比雪夫高通滤波器,性能指标如下:通带边界频率f c=0.4kHz,通带波动δ=0.5dB,阻带边界频率f r=0.3kHz,阻带最小衰减At=20dB,采样频率f s=1000Hz,观察其通带波动和阻带衰减是否满足要求。
(绘制对数幅度谱)2、设计一巴特沃思低通滤波器,性能指标如下:通带边界频率f c=0.4kHz,通带波动δ=1dB,阻带边界频率f r=0.6kHz,阻带最小衰减At=40dB,采样频率f s=2000Hz,分别用脉冲响应不变法和双线性变换法进行设计,比较两种方法的优缺点。
(绘制线性幅度谱)3、用双线性变换法设计巴特沃思、切比雪夫和椭圆低通滤波器,其性能指标如下:通带边界频率f c=1.8kHz,通带波动δ≤1dB,阻带边界频率f r=2.6kHz,阻带最小衰减A t≥50dB,采样频率f s=8kHz。
第三章 无限长单位脉冲响应1
N
根据理想采样序列拉氏变换与模拟信号拉氏变换的关系
1 2 ˆ ( s) Ha Ha s j T m T m ˆ ① 理想采样 ha(t )的拉氏变换 H a (s) 与模拟信号 ha (t )
的拉氏变换
H a (s)
之间的关系。
ˆ ② 理想采样 ha(t )的拉氏变换 H a (s) 与采样序列 h (n)的 Z 变换 H (z ) 之间存在的 S 平面与 Z 平面的映射关系。
i 1
N
A
(1 ci z 1 ) (1 d i z 1 )
i 1 i 1 N
M
一般M N
2)最优化设计方法
分两步:
a) 确定一种最优准则,如最小均方误差准则 | H (e j ) | ,即使设计出的实际频率响应的幅度特性 j (与所要求的理想频率响应 | H d (e ) | 的均方 2 误差最小, M
1 i 1 N
u (t )
单位阶跃
对ha(t)采样得到数字滤波器的单位脉冲响应序列
h(n) ha(nT ) Ai e
i 1
N
si nT
u(n) Ai (e ) u (n)
siT n i 1
N
再对h(n)取Z变换,得到数字滤波器的传递函数:
H ( z ) Ai e
H z z e ST
1 ˆ ( s) H s j 2 m Ha a T m T
He
j
1 2m H a j j T m T
正如第一章的采样定律中所讨论的, 如果模拟滤波器的频响带限于折叠频率 ΩS/2 以内, 即
数字滤波器的设计步骤:
无限长单位脉冲响应IIR滤波器的设计

无限长单位脉冲响应IIR 滤波器的设计一.设计目的1.掌握数字滤波器的设计过程;2.了解IIR 的原理和特性;3.熟悉设计IIR 数字滤波器的原理和方法;4.学习IIR 滤波器的DSP 实现原理;5.学习使用CCS 的波形观察窗口观察输入/输出信号波形和频谱变化情况。
二.设计内容1.通过MATLAB 来设计一个低通滤波器,对它进行模拟仿真确定IIR 滤波器系数。
2.用DSP 汇编语言及C 语言进行编程,实现IIR 运算,对产生的合成信号,滤除信号中高频成分,观察滤波前后的波形变化。
三.设计原理IIR 滤波器与FIR 滤波器相比具有相位特性差的特点,但它的结构简单,运算量小,具有经济高效的特点,并且可以用较少的阶数获得很高的选择性,因此也得到了广泛的应用。
IIR 数字滤波器系统的传递函数为:H(z)= NN N N z a z a z b z b b z X z Y ----+⋯⋯+++⋯⋯++=111101)()( 它具有N 个极点和N 个零点,如果任何一个极点在单位圆外,则系统不稳定。
如果系数a j (j=1,… ,N )全部为0,则滤波器变成非递归的FIR滤波器,系统总是稳定的。
对于IIR滤波器,有系数量化敏感的缺点。
由于系统对序列施加的算法是由加法、乘法和延时的基本运算的组合,所以可以用不同结构的数字滤波器来实现而不影响系统总的传输函数。
四.MATLAB设计IIR滤波器的方法我们所用滤波器设计方法为巴特沃夫Butterworth滤波器设计和切比雪夫Chebyshev滤波器设计。
MATLAB的butter函数可以设计低通、带通、高通和带阻数字滤波器,其特征可以使通带内的幅度响应最大限度的平坦,但会损失截止频率处的下降斜度,使幅度响应衰减较慢,因此butter函数主要用于设计通带平坦的数字滤波器。
如果期望幅度响应下降斜度大,衰减快,可以使用Elliptic(椭圆)或Chebyshev(切比雪夫)滤波器。
第3章 无限长单位脉冲响应(IIR)滤波器的设计方法
ˆ H a ( s)
[ha (t ) (t nT )]e
n
st
dt
n
h
ha (t ) (t nT )e st dt
nsT
n
a
(nT )e
n
h(n )e nsT
H ( z)
ut e e u nT e u n e u n
nT 3nT
T n 3T n
1 1 H ( z) 1 T 1 z e 1 z 1e 3T
z (e e ) 1 z 1 (e T e 3T ) e 4T z 2
数字滤波器的设计步骤: 1)按照实际需要确定滤波器的性能要求。 2)用一个因果稳定系统的 H(z) 或 h(n) 去逼近这个 性能要求,即求 h(n) 的表达式。 确定系数 a i 、 bi 或零极点 c i 、 d,以使滤波器 i 满足给定的性能要求——第三章、四章讨论 3)用一个有限精度的运算去实现这个系统函数。包 括 选择运算结构:如级联型、并联型、卷积型、频 率采样型以及快速卷积(FFT)型等; 选择合适的字长和有效数字的处理方法等(第五 章)。
这时数字滤波器的频响才能不失真地重现模拟滤 波器的频响(存在于折叠频率ΩS/2以内)
H (e
j
1 ) Ha ( j ) T T
但任何一个实际的模拟滤波器,其频响都不可能 是真正带限的,因此不可避免地存在频谱的交叠, 即混淆,如图,这时,数字滤波器的频响将不同于 原模拟滤波器的频响而带有一定的失真。模拟滤波 器频响在折叠频率以上衰减越大,失真则越小,这 时,采用脉冲响应不变法设计的数字滤波器才能得 到良好的效果。
无限长单位脉冲响应滤波器的设计方法

2. 最优化设计法
第一步要选择一种最优准则,然后在此准则下 , 确定系 统函数的系数。
例如,选择最小均方误差准则,最大误差最小准则等。它
是指在一组离散的频率{ωi}(i=1, 2, …, M)上,所设计 出的实际频率响应幅度|H(ejω)|与所要求的理想频率响
的特点 掌握从模拟滤波器低通原型到各种数字滤波器
的频率变换。 掌握从数字滤波器到各种数字滤波器的频率变
换
引言
1、数字滤波器的定义 用有限精度算法实现的时域离散的线性时不
变系统,用于完成对信号的滤波处理 。
低频系 列滤波
器
说明:
1)许多信息处理过程,如信号的过滤,检测、 预测等都要用到滤波器,数字滤波器是数字信 号处理中使用得最广泛的一种线性系统,是数 字信号处理的重要基础。
1. 借助模拟filter的设计方法
1)首先,设计一个合适的模拟滤波器;然后,变换成满足 预定指标的数字滤波器。这种方法很方便,因为模拟滤波 器已经具有很多简单而又现成的设计公式,并且设计参数 已经表格化了,设计起来既方便又准确。
2)将DF的技术指标转换成AF的技术指标;
3)按转换后技术指标、设计模拟低通filter的 系统函数 Ha (s) ; 将 Ha (s) H (z)
滤波器。
模拟滤波器的理想幅频特性
LPAF
H ( j)
c HPAF
c
BPAF
c
H ( j)
H ( j) c
BSAF
c
c
H ( j)
c2 c1 c1 c2
数字滤波器的理想幅频特性
第3章无限长单位脉冲响应IIR滤波器设计第一节
Ω c tan( Ω1T )
(1)
2
这里c是待定常数, c使模拟滤波器的频率特性与数 字源波器的频率特性在不同频率点有对应关系。
经过这样的频率变换, 当Ω由 0 时, Ω1由-π/T经过0变化到π/T ,即S平面的整个jΩ轴被 压缩到S1平面的2π/T 一段。
(1)式可以写为:
j
1T 2
例如线性相位的贝塞尔低通滤波器,通过脉冲响应不变法
2)在某些场合,要求数字滤波器在时域上能模仿模拟滤波器 的功能时,如要实现时域冲激响应的模仿,一般使用脉冲响应
3)如果Ha(s)是稳定的,即其极点在S左半平面,映射后得到 的H(Z)也是稳定的。
4)脉冲响应不变法的最大缺点:存在周期延拓而导致的频 谱混叠效应,因此只能用于带限的频响特性,例如衰减特性很 好的低通或带通,而高频衰减越大,频响的混淆效应越小。至 于高通和带阻滤波器,由于它们在高频部分不衰减,因此不宜采 用脉冲响应不变法。
Hˆ a (s)
1 T
m
H
a
s
j
2
T
m
以上表明,采用脉冲响应不变法将模拟滤波器变换 为数字滤波器时,它所完成的 s 平面到 z 平面的变换, 正是拉氏变换到z变换的标准变换关系,即首先对Ha(s)
作周期延拓,然后再经过 zeST的映射关系映射到 z
平面上。
H z
z esT
Hˆ a
(s)
Ha( j T )
0
H (e j )
0
脉冲响应不变法中的频响混淆
(4)几个 结论
1)脉冲响应不变法的一个重要特点是频率坐标的变换是线性 的,ω=ΩΤ,ω与Ω是线性关系。
因此如果模拟滤波器的频响带限于折叠频率以内的话,通 过变换后数字滤波器的频响可不失真地反映原响应与频率的关
第五章 无限长单位脉冲响应数字滤波器设计

第五章 数字滤波器5-3 无限长单位脉冲响应数字滤波器设计一、概述数字滤波器从实现的网络结构或者从单位脉冲响应分类,可以分成无限脉冲响应(IIR)滤波器和有限脉冲响应(FIR)滤波器。
它们的系统函数分别为:理想低通、高通、带通、带阻滤波器幅度特性2 数字滤波器的技术要求我们通常用的数字滤波器一般属于选频滤波器。
假设数字滤波器的传输函数H(e j ω)用下式表示:通带内和阻带内允许的衰减一般用dB 数表示,通带内允许的最大衰减用αp 表示,阻带内允许的最小衰减用αs 表示,αp 和αs 分别定义为:011()1()()Mrr r Nk kk N nn b z H z a z H z h n z -=-=--==+=∑∑∑)(e j ωH )(e j ωH )(e j ωH )(e j ωH 0低通0高通0带通0带阻ωωωωπ-π2-π2-π2-π-π-π-π-ππππ2π2π2π2()()()j j j H e H e e ωωωΩ=00()20lg ()()20lg()psj p j j s j H e dBH e H e dBH e ωωαα==如将|H(ej0)|归一化为1,则表示成:3. 数字滤波器设计方法概述IIR 滤波器和FIR 滤波器的设计方法是很不相同的。
IIR 滤波器设计方法有两类,经常用的一类设计方法是借助于模拟滤波器的设计方法进行的。
其设计步骤是:先设计模拟滤波器得到传输函数Ha(s),然后将Ha(s)按某种方法转换成数字滤波器的系统函数H(z)。
二、模拟滤波器的设计模拟滤波器的理论和设计方法已发展得相当成熟,且有若干典型的模拟滤波器供我们选择,如巴特沃斯(Butterworth)滤波器、切比雪夫(Chebyshev)滤波器、椭圆(Cauer)滤波器、贝塞尔(Bessel)滤波器等,这些滤波器都有严格的设计公式、现成的曲线和图表供设计人员使用。
图5-21理想滤波器的幅频特性1.模拟低通滤波器的设计指标及逼近方法模拟低通滤波器的设计指标有αp, Ωp,αs 和Ωs 。
第六章 无限长单位冲激响应(IIR)数字滤波器的设计方法

6.1 引 言
数字滤波器的性能要求
通带截止频率 误差容限 阻带截止频率
具有误差容限的的滤波器具有三个特征范围: 通带 过渡带
阻带
1 1 H (e j ) 1,
c
c st
H (e j ) 2 , st
第六章 IIR数字滤波器的设计方法
z e j
H ( z)H ( z 1) 的零极点特征:
1 若 z re ji 是H(z)的极点,则 z e ji 是H(z-1)的极点。 r 即 H ( z)H ( z 1) 的极点是以单位圆镜像对称的,同时也是共轭的。
jIm[z]
满足上述条件的极点可能有几种情况。 对于可实现的系统,系统函数的极点都在单位圆内。 对于零点的分析类似极点,只是系统函数的零点没
0 1
Re[z]
4
有只在单位圆内的限制。
第六章 IIR数字滤波器的设计方法
6.1 引 言
M
设计IIR数字滤波器的方法 数字滤波器可用系统函数表示
H ( z)
1 ak z k
k 0
k 0 N
bk z k
对IIR系统,N>0,且一般有MN。
设计的目的就是要求出ak和bk,使对应的传输函数逼近所要求的特性。
对于因果稳定的LSI系统,其单位冲击响应 h(n)为实函数,因而满足共轭 对称条件,即 H (e j ) H (e j )
第六章 IIR数字滤波器的设计方法
6.1 引 言
幅度平方响应:
H (e
j 2
) H (e j ) H (e j ) H (e j ) H (e j ) H ( z ) H ( z 1 )
【2019年整理】CH3无限长单位脉冲响应滤波器IIR的设计方法

Slide 3
设计数字滤波器的步骤:
• 一般包括以下三步: • (1)按照任务的要求,确定滤波器的性能 指标任务包括:
°需要滤除哪些频率分量 °保留哪些频率分量 °保留的部分允许有多大的幅度或相位失真
• •
Slide 4
(2)用一个因果稳定的离散线性时不变系 统的系统函数去逼近这一性能要求 系统函数可以分为IIR和FIR两类系统
• 该方法只适用于带限的AF。
• 高通和带阻滤波器不宜采用脉冲响 应不变法
否则要加保护滤波器,滤掉高于折叠 频率以上的分量。
阻带衰减越大,则混叠效应越小
• 带通和低通滤波器,需充分地带限
Slide 24
例1 将已知传递函数的模拟滤波器数字化
图3.3 脉冲响应不变法的幅频特性
Slide 25
3.1.2 双线性变换法 P105
M
一般M N
Slide 7
系统的组成
•一般,M≤N,这类系统称为N阶系统
•当 M > N 时, H(z) 可看成是一个 N 阶 IIR 子系统与一个 (M-N) 阶的 FIR 子系 统的级联。
X(n)
IIR
(N阶)
FIR
(M-N阶)
y(n)
Slide 8
数字低通滤波器频率响应幅度特性的容限图
H (e j )
1+ 1 1 1- 1 通带 过渡带 阻带
2
o
1 1 | H (e j ) | 1 1
| H (e j ) | 2
Slide 9
|ω|≤ωc ωr≤|ω|≤π
IIR滤波器的逼近问题
• 寻找滤波器的各系数 ai 和 bi,使其逼 近一个所要求的特性。 • 通常有以下两种方法:
无限长单位冲激响应IIR数字滤波器的设计方法
这时相位变化最大,称最大相位超前系统,是逆 因果稳定系统。
b 当全部零点在单位圆外时即 mi 0(mo M )有
H (e j )
arg
K
2
2 ( p0
mo )
这时相位超前最小,称最小相位超前系统,是逆
因果移动系统。
表6.1 四种系统及其因果性、稳定性、零 点、极点旳关系。
最小相位系统主要性质
(2)对逆因果移动系统,此时
p0 N , pi 0
当 从0变到 2 时, 2 ,则辐角变化量
为称为相arg位 H超(Ke前j 系) 统。2 2 mi 2 (N M )
a 当全部零点在单位圆内时,即 mi M (mo 0)有
H (e j )
arg
K
2
2 N
2
p0
N k 1
s
Ak sk
N
ha (t)
H N
a
(
s)
(6.32)
其h(相n) 应ha旳(nT冲) 激响A应k esknT u(n)是 Ak (旳eskT拉)n u普(n拉) 斯变换即
k 1
k 1
(6.33)
N
N
H (对z) h (n)h求(n)zz变n 换,得Ak 数(esk字T z 1滤)n 波 器A系k 统(es函kT z数1)n
k 1
cm ) | dk ) |
各零矢量模的连乘积
各极矢量模的连乘(积6.14)
arg
H (e j K
)
M
arg
m1
e j
cm
M
arg
m1
e
j
dk
(N M )
(6.15)
若mi , mo , pi , po分别表达单位圆内外旳零极点数则
无限长单位脉冲响应IIR
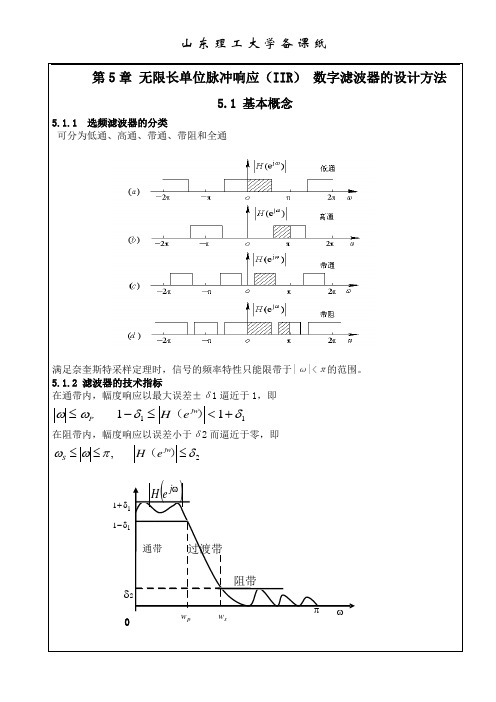
第5章 无限长单位脉冲响应(IIR ) 数字滤波器的设计方法5.1 基本概念5.1.1 选频滤波器的分类可分为低通、高通、带通、带阻和全通满足奈奎斯特采样定理时,信号的频率特性只能限带于|ω|<π的范围。
5.1.2 滤波器的技术指标在通带内,幅度响应以最大误差±δ1逼近于1,即1111 δδωω+<≤-≤)(jw P e H在阻带内,幅度响应以误差小于δ2而逼近于零,即2 ,δπωω≤≤≤)(jw S e H1)()ωj e H (π1 δ阻带过渡带ωπ2 δ通带11δ+11δ-sw p wN 为奇数时实轴上有极点,N 为偶数时实轴上没有极点。
要称为稳定的滤波器)s (H a 表示为:∏=-Ω=Nk k N Ca )s s ()s (H 1方法2:,s s p A A P 、、由模拟ΩΩc ,Ω→N c ,Ω→N⎥⎥⎦⎤⎢⎢⎣⎡ΩΩ+=Ω-Ω=ΩNa P j H A 2c p 2p )(11lg 10)(lg 10 -=在 ⎥⎦⎤⎢⎣⎡ΩΩ+=Ω-Ω=ΩN a P j H A 2c S 2S )(11lg 10)(lg 10 -=在 ⎥⎥⎦⎤⎢⎢⎣⎡ΩΩ--=)(lg 2])110()110(lg[s p 1010sp A A N NA sc s 210110-Ω=Ω(通带指标改善)或 NA Pc P 210110-Ω=Ω(阻带指标改善)方法3: )()(s H s H a aN →NN N aN ss a s a s a s H ++++=--1122111)( caN a s s s H s H Ω'=→)()( 例 1 导出三阶巴特沃思模拟低通滤波器的系统函数, 设Ωc =2 rad/s 。
解 幅度平方函数是62)2/(11|)(|Ω+=Ωj H 令Ω2=-s 2即s =j Ω,则有)2/(11)()(66s s H s H a a -=-π⎥⎦⎤⎢⎣⎡-+=612212k j k es k =1, 2, …, 6会产生频率混叠,适合低通、带通滤波器的设计,不适合高通、带阻滤波器的设计。