无刷直流电机仿真
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
无刷直流电机控制系统的仿真
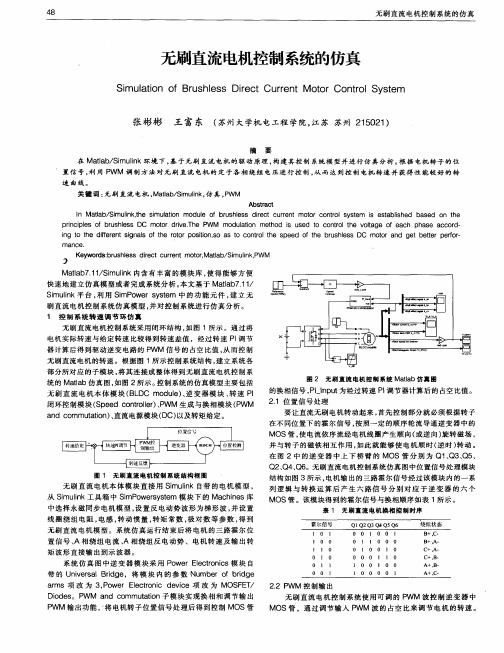
a n d c o mmu t a t i o n ) 、 直 流 电源模 块 ( D C) 以及 转 矩 给定 。
在 图 2中 的 逆 变 器 中 上 下 桥 臂 的 MOS 管 分 别 为 Q1 、 Q 3 、 Q5 、
Q2 、 Q4 、 Q 6 。无 刷直 流 电机控 制 系 统 仿 真 图 中位 置 信号 处 理 模块
无 刷 直 流 电 机 控 制 系 统 的 仿 真
无刷直流电机控制系统的仿真
Si mu l a t i o n o f B r u s h l e s s Di r e c t Cu r r e n t Mo t o r Co n t r o l Sy s t e m
的换 相信 号 , P I — I n p u t 为经 过 转 速 P l 调 节器 计 算 后 的 占空 比值 。 2 . 1 位 置 信 号 处 理 要 让 直流 无 刷 电 机 转动 起 来 , 首先 控 制 部 分 就 必 须 根据 转 子 在 不 同位 置 下 的霍 尔 信 号 , 按 照 一定 的顺 序 轮 流 导 通逆 变器 中 的 MOS管 , 使 电流 依 序 流 经 电 机线 圈产 生 顺 向( 或逆 向) 旋转磁场 , 并 与 转 子 的磁 铁 相 互 作 用 , 如 此 就 能 够 使 电机 顺 时 ( 逆时 ) 转动 。
i n g t o t he di fer en t s i gn al s o f t h e r ot or po s i t i o n, S O as t o co n t r ol t h e s pe e d of t h e b r u s hl es s DC m o t or a n d g e t be t t e r pe r f or —
无刷直流电机仿真教程
基于MATLAB/SIMULINK的无刷直流电动机系统仿真0引言无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
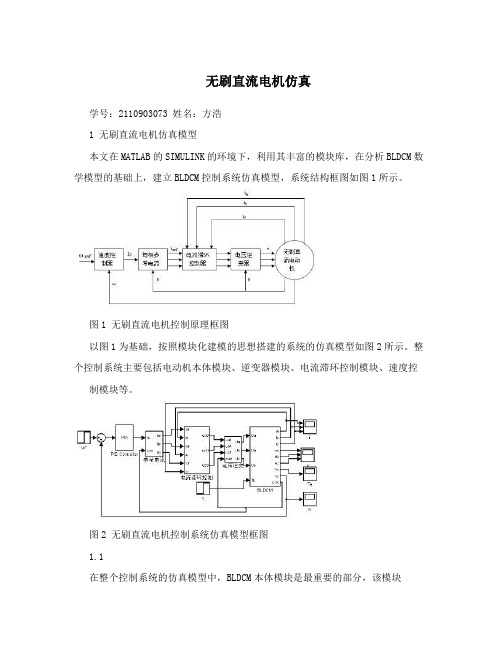
1无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
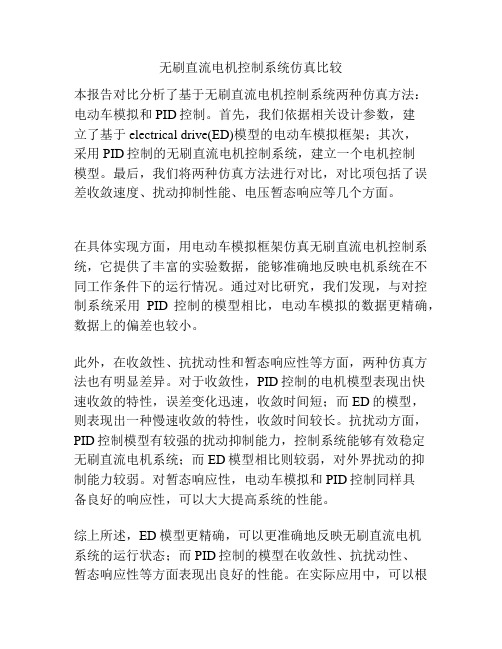
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1电动机本体模块在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1.反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
永磁无刷直流电动机的设计和仿真研究

永磁无刷直流电动机的设计和仿真研究一、本文概述本文旨在全面探讨永磁无刷直流电动机(Permanent Magnet Brushless DC Motor, PMBLDCM)的设计和仿真研究。
永磁无刷直流电动机作为现代电力驱动系统的关键组件,具有高效率、高功率密度、低噪音和低维护成本等诸多优点,因此在电动汽车、航空航天、家用电器等领域得到了广泛应用。
本文将从理论基础、设计原则、仿真方法、优化策略等多个方面,对永磁无刷直流电动机的设计和仿真进行深入研究。
本文将概述永磁无刷直流电动机的基本工作原理和结构特点,为后续的设计研究和仿真分析奠定理论基础。
接着,重点讨论电动机设计过程中的关键因素,包括绕组设计、磁路设计、热设计以及电磁兼容性设计等,并提出相应的设计原则和优化策略。
在此基础上,本文将探讨基于数值计算的仿真分析方法,包括有限元分析、电路仿真、热仿真等,以评估电动机的性能和可靠性。
本文将总结永磁无刷直流电动机设计和仿真研究的最新进展,展望未来的发展趋势和研究方向。
通过本文的研究,旨在为读者提供一套完整的永磁无刷直流电动机设计和仿真分析框架,为推动该领域的技术进步和应用发展做出贡献。
二、永磁无刷直流电动机的基本原理与特点永磁无刷直流电动机(Permanent Magnet Brushless DC Motor, PMBLDCM)是一种结合了直流电机与无刷电机技术的先进电动机类型。
其基本原理在于利用永久磁铁产生的恒定磁场作为电机的励磁场,并通过电子换向器实现电流的换向,从而实现电机的连续旋转。
这种设计消除了传统直流电机中的机械换向器和电刷,显著提高了电机的运行效率和可靠性。
高效率:由于消除了机械换向器和电刷,减少了能量损失和摩擦,使得PMBLDCM具有更高的运行效率。
高转矩密度:永磁体产生的恒定磁场使得电机在相同体积下能够产生更大的转矩。
良好的调速性能:通过电子换向器,可以实现对电机转速的精确控制,满足各种应用需求。
无刷直流电机控制系统的仿真与分析
无刷直流电机控制系统的仿真与分析一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效、低噪音、长寿命等优点,已广泛应用于电动汽车、无人机、家用电器等众多领域。
然而,无刷直流电机的控制系统设计复杂,涉及电子技术、控制理论、电机学等多个学科领域,因此,对其进行深入研究和仿真分析具有重要意义。
本文旨在探讨无刷直流电机控制系统的基本原理、仿真方法以及性能分析。
将简要介绍无刷直流电机的基本结构和控制原理,包括其电机本体、电子换向器、功率电子电路等关键部分。
将详细介绍无刷直流电机控制系统的仿真建模过程,包括电机模型的建立、控制算法的设计以及仿真环境的搭建。
通过对仿真结果的分析,评估无刷直流电机控制系统的性能,包括动态响应、稳态精度、效率等指标,并提出优化建议。
本文的研究不仅有助于深入理解无刷直流电机控制系统的运行机制和性能特点,还可为实际工程应用提供理论支持和指导。
通过仿真分析,可以预测和优化无刷直流电机控制系统的性能,提高系统的稳定性和可靠性,推动无刷直流电机在更多领域的应用和发展。
二、无刷直流电机控制系统基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器替代传统机械换向器的直流电机。
其控制系统主要由电机本体、电子换向器(也称为功率电子电路或逆变器)以及控制器三部分组成。
无刷直流电机控制系统的基本原理,就在于如何准确地控制逆变器的开关状态,从而改变电机内部的电流流向,实现电机的连续旋转。
控制器根据电机的运行状态和用户的输入指令,生成适当的控制信号。
这些控制信号是PWM(脉宽调制)信号,用于控制逆变器的开关状态。
逆变器一般由六个功率开关管(如MOSFET或IGBT)组成,分为三组,每组两个开关管串联,然后三组并联在直流电源上。
每组开关管分别对应电机的一个相(A、B、C),通过控制每组开关管的通断,可以改变电机每相的电流大小和方向。
无刷直流电机的模糊控制系统仿真
摘要无刷直流电动机是电力电子技术、微电子技术和永磁材料技术相结合的一种新型电动机。
无刷直流电动机具有体积小、运行可靠、控制相对简单等特点。
目前,无刷直流电机正在快速发展。
尤其是在家用电器、精密仪器、电梯控制等领域,无刷直流电动机都获得了很多成功应用。
本文详细的介绍了无刷直流电机的组成、基本原理和数学模型。
介绍了简单模糊控制器的设计过程。
通过分析MATLAB中“ac7_example”模型,利用Simulink 工具箱搭建模糊控制器,采用模糊控制法对无刷直流电机进行调速。
实现了无刷直流电机的模糊控制系统的计算机仿真。
结果表明,该模糊控制器结构简单、易于实现,能够基本满足系统的性能要求。
关键词:无刷直流电机;模糊控制;Matlab;SimulinkABSTRACTBrushless DC motor is the electric power and electronic technology, microelectronic technology and permanent magnet material technology is combined with a novel motor. Brushless DC motor has the advantages of small volume, reliable operation, control of relatively simple features such as. At present, brushless DC motor are rapid development. Especially in household appliances, precision instruments, elevator control and other fields, brushless DC motors have gained a lot of successful application.This paper introduces the brushless DC motor of the composition, basic principle and mathematical model. Introduction of simple fuzzy controller design process. Through the analysis of the MATLAB "ac7_example" model, the use of Simulink toolbox to build the fuzzy controller, the fuzzy control method of Brushless DC motor speed control. Realization of Brushless DC motor fuzzy control system computer simulation. The results show that, the fuzzy controller has the advantages of simple structure, easy to implement, can basically meet the system performance requirements.Key words:Brushless DC motor;fuzzy control;Matlab;Simulink目录第一章绪论 (1)一、课题背景 (1)二、无刷直流电机的发展历程 (1)三、无刷直流电机的结构特点 (2)四、无刷直流电机的应用 (2)五、主要研究内容 (3)第二章无刷直流电机的基本原理 (4)第一节无刷直流电机的基本组成 (4)第二节无刷直流电机的工作原理 (6)第三节无刷直流电机的数学模型 (7)第三章模糊控制仿真设计 (10)第一节模糊控制 (10)第二节Matlab简介 (12)第三节Simulink组件介绍 (12)第四节典型模糊控制设计 (13)第五节无刷直流电机系统的稳定性分析 (17)第四章无刷直流电机的糊控制仿真 (19)第一节无刷直流电机调速系统模型 (19)第二节无刷直流电机的模糊控制设计 (22)结论 (28)参考文献 (29)致谢 (30)第一章绪论一、课题背景无刷直流电机是一种把控制装置和电机本体结合在一起的机电一体化设备,它具有高效率,高功率,高可靠性等优点。
直流无刷电机的PWM仿真分析
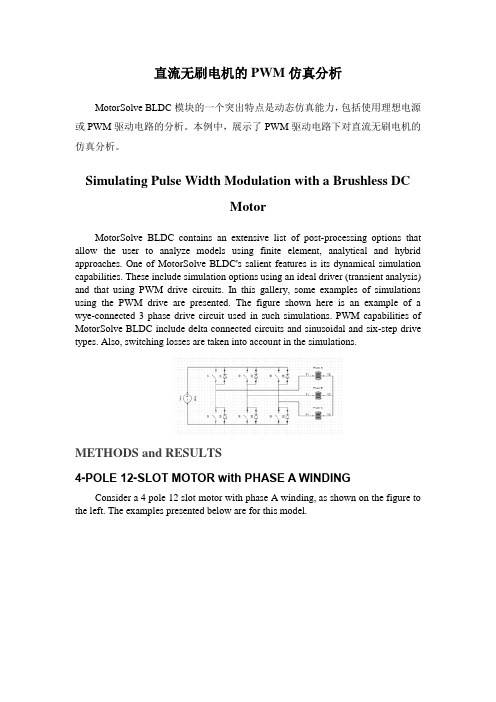
直流无刷电机的PWM仿真分析MotorSolve BLDC模块的一个突出特点是动态仿真能力,包括使用理想电源或PWM驱动电路的分析。
本例中,展示了PWM驱动电路下对直流无刷电机的仿真分析。
Simulating Pulse Width Modulation with a Brushless DCMotorMotorSolve BLDC contains an extensive list of post-processing options that allow the user to analyze models using finite element, analytical and hybrid approaches. One of MotorSolve BLDC's salient features is its dynamical simulation capabilities. These include simulation options using an ideal driver (transient analysis) and that using PWM drive circuits. In this gallery, some examples of simulations using the PWM drive are presented. The figure shown here is an example of a wye-connected 3 phase drive circuit used in such simulations. PWM capabilities of MotorSolve BLDC include delta connected circuits and sinusoidal and six-step drive types. Also, switching losses are taken into account in the simulations.METHODS and RESULTS4-POLE 12-SLOT MOTOR with PHASE A WINDINGConsider a 4 pole 12 slot motor with phase A winding, as shown on the figure to the left. The examples presented below are for this model.LINE CURRENTS for the THREE PHASESPWM simulations are performed easily in MotorSolve BLDC. The user simply inputs the operating parameters, elects to perform a PWM Analysis, selects the solution entities of interest and MotorSolve BLDC automatically generates the results with-a-click. Consider the following settings applied to the model shown above: PWM 3-phase bridge simulation, six-step drive type, wye connected windings operating at 1000 rpm. The line currents for the three phases with these settings are shown on the figure to the left. The 'spikes' seen in the various phases represent current switchings.INSTANTANEOUS BACK EMF on PHASE A at VARIOUS ROTOR SPEEDSA number of interesting results are available to the designer from the PWM simulations including torque, back emf, line and winding voltages, power input and output, flux linkage, etc. The user may generate instantaneous, time-averaged as well as harmonic contents of these entities. For example, the instantaneous back emf on phase A at various rotor speeds are shown on this figure. As expected, the back emf is seen to scale appropriately with rotor speeds.HARMONIC COMPONENTS of the BACK EMFHarmonic components are also available. The harmonic components of the back emf at 1000 rpm for one of the phases is shown here.TIME-AVERAGED TORQUE VS SPEEDThe motor designer may be interested in how outputs vary as a function of rotor speeds, advance angles or for various prototypes. MotorSolve BLDC's PWM capabilities allow the user to make such comparisons readily. Consider for example, the time-averaged torque versus speed variation for the motor above. As the rotor speed and consequently the back emf increases, the torque generated decreases as the rail voltage becomes comparable to the back emf. This is captured clearly in the results shown here.TIME-AVERAGED TORQUE VS ADVANCE ANGLE at VARIOUS ROTOR SPEEDSConsider now the time-averaged torque versus advance angle at various rotor speeds. As the angle between the winding currents and the q-axis increases, the torque generated is seen to decrease at low rotor speeds and increase initially for higher rotor speed values (due to field weakening) before following the same trend as that for low rotor speeds. Hence, to generate the same level of torque over a wide range of rotor speeds, increasing the advance angle is seen to help.SUMMARYThese are some basic examples of the type of analysis that may be done in MotorSolve BLDC using PWM simulations. MotorSolve BLDC is capable of generating other many interesting PWM simulation results that complement its extensive post-processing capabilities.。
无刷直流电机调速系统的建模与仿真分析
无刷直流电机调速系统的建模与仿真分析摘要:本文基于电机运行方程建立无刷直流电机的仿真模型,对无刷直流电机的转速环、电流环双环控制策略进行仿真,通过仿真结果验证无刷直流电机仿真模型的有效性以及控制策略的有效性。
主题词:无刷直流电机;建模;仿真;控制。
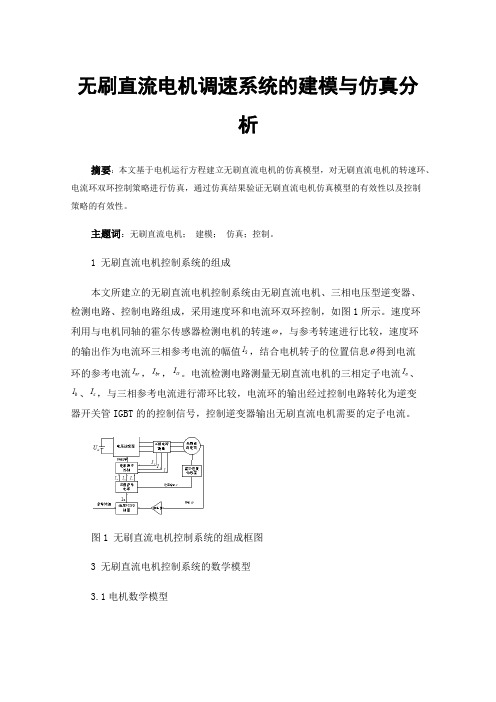
1 无刷直流电机控制系统的组成本文所建立的无刷直流电机控制系统由无刷直流电机、三相电压型逆变器、检测电路、控制电路组成,采用速度环和电流环双环控制,如图1所示。
速度环利用与电机同轴的霍尔传感器检测电机的转速,与参考转速进行比较,速度环的输出作为电流环三相参考电流的幅值,结合电机转子的位置信息得到电流环的参考电流,,。
电流检测电路测量无刷直流电机的三相定子电流、、,与三相参考电流进行滞环比较,电流环的输出经过控制电路转化为逆变器开关管IGBT的的控制信号,控制逆变器输出无刷直流电机需要的定子电流。
图1 无刷直流电机控制系统的组成框图3 无刷直流电机控制系统的数学模型3.1电机数学模型无刷直流电机定子绕组为三相Y型接法,两两导通方式,驱动电路采用三相全桥逆变电路。
为了方便分析BLDCM的数学模型及电磁转矩等特性,作如下假设[2]:(1)三相绕组完全对称,气隙磁场分布为梯形波,平顶宽为120°电角度;(2)忽略齿槽、换相过程和电枢反应的影响;(3)磁路不饱和,不计涡流和磁滞损耗;(4)电枢绕组在定子内表面均匀连续分布。
3.1.1 电压平衡方程BLDCM的电压平衡方程如公式1所示。
(1)式中,、、——定子各相电压,单位:V;——定子电阻,单位:;、、——定子各相电流,单位:A;,——定子电感,互感,单位:H;、、——各相反电势,单位:V。
3.1.2 转矩方程和机械运动方程BLDCM的转矩方程如公式2所示,机械运动方程如公式3所示。
(2) (3)式中,——电磁转矩,单位;——电机转子减速度,单位rad/s;——负载转矩;单位为;——转动惯量,单位为;——阻尼系数,单位为。
无刷直流电机仿真
无刷直流电机仿真学号:2110903073 姓名:方浩1 无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i,i,abi必须首先求得三相反电动势信号e,e,e,整个电动机本体模块的结果如下图cabc3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1. 反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图 4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360?内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
其中Ke为电机的反电动势系数。
具体的Lookup Table参数设置参照下表 1。
表 1 位置信号和单位反电动势的关系0 60 120 180 240 300 360 位置A 1 1 1 -1 -1 -1 1B -1 -1 1 1 1 -1 -1C 1 -1 -1 -1 1 1 1 2. 转矩计算模块依据数学模型建立转矩计算模型如图5所示。
图5 转矩计算模块3. 中性点求取模块求出反电动势后根据电压平衡方程来求中性点电压,具体模块如图6所示。
使用Simulink进行无刷直流电机控制仿真

使用Simulink进行无刷直流电机控制仿真无刷直流电机是一种常用于各种工业自动化和机器人应用中的电机类型。
与传统的直流电机相比,无刷直流电机具有较高的效率、较低的噪音和较长的寿命。
Simulink是一种功能强大的工具,用于进行动态系统建模和仿真。
在Simulink中,可以使用Simscape Power Systems工具箱对无刷直流电机进行模拟和控制。
在进行无刷直流电机控制仿真之前,首先需要建立电机的数学模型。
无刷直流电机的数学模型可以由电磁动力学定律得出。
模型包括电机的旋转动力学和电磁动力学部分。
电机的旋转动力学部分描述了转子速度和转矩之间的关系,而电磁动力学部分描述了电机的电流和磁场之间的关系。
建立无刷直流电机的数学模型后,可以在Simulink中进行仿真。
在Simulink中,可以使用不同的模块来模拟电机的不同部分,如电压源、电流控制器和速度控制器等。
可以使用电压源模块来模拟电机的输入电压,使用电流控制器模块来模拟电机的电流控制,使用速度控制器模块来模拟电机的速度控制。
此外,还可以使用作用在电机上的外部负载模块来模拟电机的负载情况。
在进行无刷直流电机控制仿真时,可以使用控制器来调整电机的输入电压和输出速度,以实现所需的转矩和速度控制。
在Simulink中,可以使用PID控制器模块来实现电机的控制。
PID控制器可以根据电机的输入电压和输出速度之间的误差来调整控制信号,以使电机的输出速度达到预期的目标值。
在完成无刷直流电机控制仿真后,可以使用Simulink中的数据可视化工具来分析仿真结果。
可以绘制电机输入电压、输出速度和负载转矩等变量随时间的变化曲线,以评估电机控制系统的性能。
总之,使用Simulink进行无刷直流电机控制仿真可以帮助工程师更好地了解电机的工作原理和性能。
通过仿真,可以优化电机控制系统的设计参数,提高电机的性能和效率。
同时,仿真还可以减少现场试验的时间和成本。
因此,Simulink是进行无刷直流电机控制仿真的理想工具。
无刷直流电机控制系统仿真比较
无刷直流电机控制系统仿真比较
本报告对比分析了基于无刷直流电机控制系统两种仿真方法:电动车模拟和PID控制。
首先,我们依据相关设计参数,建
立了基于electrical drive(ED)模型的电动车模拟框架;其次,
采用PID控制的无刷直流电机控制系统,建立一个电机控制
模型。
最后,我们将两种仿真方法进行对比,对比项包括了误差收敛速度、扰动抑制性能、电压暂态响应等几个方面。
在具体实现方面,用电动车模拟框架仿真无刷直流电机控制系统,它提供了丰富的实验数据,能够准确地反映电机系统在不同工作条件下的运行情况。
通过对比研究,我们发现,与对控制系统采用PID控制的模型相比,电动车模拟的数据更精确,数据上的偏差也较小。
此外,在收敛性、抗扰动性和暂态响应性等方面,两种仿真方法也有明显差异。
对于收敛性,PID控制的电机模型表现出快
速收敛的特性,误差变化迅速,收敛时间短;而ED的模型,
则表现出一种慢速收敛的特性,收敛时间较长。
抗扰动方面,PID控制模型有较强的扰动抑制能力,控制系统能够有效稳定
无刷直流电机系统;而ED模型相比则较弱,对外界扰动的抑
制能力较弱。
对暂态响应性,电动车模拟和PID控制同样具
备良好的响应性,可以大大提高系统的性能。
综上所述,ED模型更精确,可以更准确地反映无刷直流电机
系统的运行状态;而PID控制的模型在收敛性、抗扰动性、
暂态响应性等方面表现出良好的性能。
在实际应用中,可以根
据需要灵活地采用不同仿真方法,以满足电机控制系统的使用需求。
无刷直流电机控制系统的设计及仿真2
目录一、前言二、系统方案设计1、系统设计要求 (2)2、系统总体框架 (3)3、主电路供电方案选择 (3)4、逆变电路的选择 (4)三、基于MC33035的无刷直流电动机调速系统 (5)1、MC33035无刷直流电动机控制芯片 (5)2、基于MC33035的无刷直流电动机调速系统设计 (7)四、无刷直流电机调速系统的MATLAB仿真 (9)1、电源、逆变桥和无刷直流电机模型 (10)2、换相逻辑控制模块 (10)3、PWM调制技术 (14)3.1、等脉宽PWM法 (16)3.2、SPWM(Sinusoidal PWM)法 (16)4、控制器和控制电平转换及PWM发生环节设计 (17)5、系统的仿真、仿真结果的输出及结果分析 (18)5.1、起动,阶跃负载仿真 (18)5.2、可逆调速仿真 (20)一、前言无刷直流电机的发展直流电动机由于其在运动控制领域的卓越扭矩特性已得到广泛应用,与传统的直流电动机和机械毛刷,可靠性差的需要,减刑会产生电磁干扰,噪声,火花,无线电干扰和寿命短的致命弱点,具有较高的生产成本和维修问题的严重影响,如联合直流电动机控制系统的进一步发展的弊端。
随着社会生产力,人民生活水平不断提高的发展,他们不断开发新类型的电机。
科学技术的进步,新兴技术和新材料,同时也进一步推动电动汽车将继续推出新产品。
对于传统的直流电机,只要30年早在20世纪的上述缺点,人们开始开发一个电子交流始终以取代无刷直流电动机刷机,并提出相应数量的结果。
但是,这只是高功率处于发展的初级阶段的电子设备,没有找到理想的电子换向元件。
使这个运动只能停留在实验室研究阶段,没有推广。
1955年,美国四哈里森,谁首先提出了晶体管使用该电机接替该专利申请的机械换向器,这是现代无刷直流电动机的原型。
但是,因为没有马达的起动转矩,使其不能成为产品。
后来,经过多年的艰苦工作的人,终于由霍尔元件实现无刷直流电动机换意味着在1962年来,创造了直流无刷电机产品的时代。
无刷直流电机PID控制SIMULINK仿真问题解救
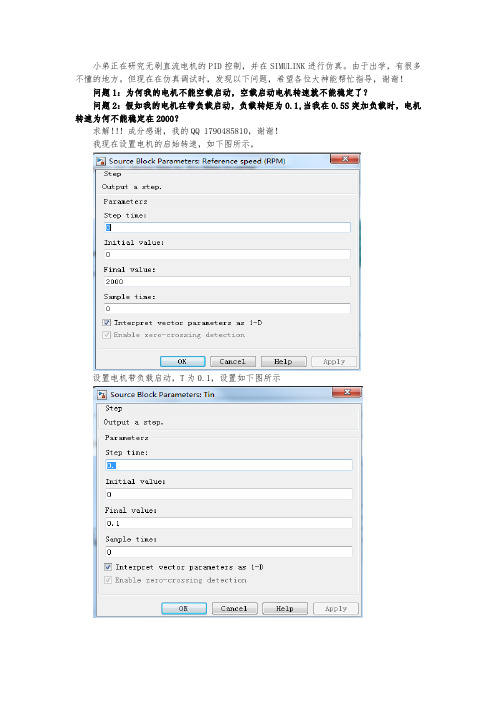
小弟正在研究无刷直流电机的PID控制,并在SIMULINK进行仿真。由于出学,有很多不懂的地方。但现在在仿真调试时,发现以下问题,希望各位大神能帮忙指导,谢谢!
此时我将电机的三相电流波形以及转速波形贴出如下
转速波形贴出如下:
我设置的最终转速为2000。
但是我此刻若将转矩设为0,我设置的最终转速还是2000,转速波形不能稳定,一直往上升。如下图所示
电流波形如下图所示:应该是正常的
但是为何速度不能稳定在2000
此时,我假使设定电机带负载启动,启动转矩T=0.1,在0.5S突加负载0.15,设置如下图所示
问题1:为何我的电机不能空载启动,空载启动电机转速就不能稳定了?
问题2:假如我的电机在带负载启动,负载转矩为0.1,当我在0.5S突加负载时,电机转速为何不能稳定在2000?
求解成分感谢,我的QQ 1790485810,谢谢!
我现在设置电机的启始转速,如下图所示,
设置电机带负载启动,T为0.1,设置如下图所示
设置的转速最终稳定 在2000,但当我在0.5S加0.15的转矩时,发生了变化,如下图所示
电机转速下降了,而且不能稳定在2000。电机电流波形如下
。
电机总体仿真图如下所示:
现在将各部分参数列出如下:
DC电源:+12V;
电机参数:
从左边开始,第一个PI模块参数:
第个PI模块参数:
一种机载无刷直流电机的设计仿真与优化
一种机载无刷直流电机的设计仿真与优化一种机载无刷直流电机的设计仿真与优化一、引言在现代工业制造中,无刷直流电机得到了广泛的应用,作为一种广泛使用的电机类型,在空气动力学、航空航天、现代交通等领域得到了广泛的应用。
本文将介绍一种机载无刷直流电机的设计、仿真与优化方案。
二、电机的设计1.选型在设计电机时,首先需要根据使用要求和限制条件进行选型工作。
我们选用的电机为3508型号的无刷直流电机,该型号的电机具有低功耗、乘载能力高等优点。
2.参数设定电机的参数设定是电机设计的重要步骤。
我们着重考虑了电机的功率、速度、扭矩、效率等参数,可以采用ANSYS仿真软件进行电机参数设定。
3.电机结构设计在进行电机结构设计时,需要注意电机的内部结构、外围结构、转子、定子、绕组、机壳、风扇等各个方面,本文的研究是以3508型号的无刷直流电机为基础。
三、电机的仿真1.建模在进行仿真时,首先要建立电机的三维模型,建立模型的目的是为了求解电机各个部件的电磁催化力、电磁力矩、空气动力学等问题,我们采用的仿真软件是ANSYS。
2.分析通过对电机模型的分析,可以得出电机的各项参数,除此之外,还可以预测电机在不同工作状态下的运行状态和性能,通过这些分析,可以对电机的结构进行优化,提高电机的运行效率和工作稳定性。
四、电机的优化1.结构优化在对3508型号的电机进行仿真分析后,我们发现电机中存在一些不合理的结构,如沉头螺栓的设计、附加重物的使用等,因此我们对电机的结构进行了优化,并改进了电机的设计,极大的提高了电机的性能和运作稳定性。
2.效率优化通过对电机的仿真和数据分析,我们发现电机的效率有待进一步提高,我们采用更为智能的调速控制、降低磁力损耗、提高能量利用率等措施,进一步优化电机效率。
五、结论本文研究了一种机载无刷直流电机的设计、仿真与优化方案,对3508型号的电机进行了多方面的优化,极大的提高了电机的性能和运作稳定性,为电机的应用提供了重要的基础,后续也需要进一步研究和完善。
无刷直流电机的建模与仿真
无刷直流电机的建模与仿真一、引言随着无刷直流电机在伺服系统、电动汽车、机器人及家用电器等领域的广泛应用,人们对电机及其系统的运行分析和优化设计也越来越关注。
借助建模与仿真技术,人们可以研究、分析整个电机系统的各类定量关系,提取设计、分析和调试电机及其驱动系统所需的信息、数据和资料。
本文主要研究反电动势近似梯形波的永磁无刷直流电机模型的建立与仿真,通过MATLAB/SIMULINK ,构建一个无刷直流电机的控制系统模型,并对其进行仿真分析。
二、无刷直流电机的数学模型无刷直流电机具有梯形的反电动势、矩形电流波形,定子与转子的互感是非线性的,因此不宜采用坐标变换的方法进行分析。
为了便于分析,简化系统的模型,假设电机铁磁部分的磁路为线性,即不计饱和、剩磁、磁滞和涡流的影响;不考虑电枢反应对气隙磁场的影响;三相定了为Y 形连接。
由此可得无刷直流电机三相绕组的电压方程如下:⎪⎪⎪⎭⎫⎝⎛+⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛c b a c b a C CBCABC B BAAC AB A c b a c b a e e e i i i p L L L L L L L L L i i i R R Ru u u 000000 (1)其中a u ,b u ,c u ——三相相电压; a i ,b i ,c i ——三相相电流;a e ,b e ,c e ——三相反电动势; A L ,B L ,C L ——三相绕组的自感;AB L ,AC L ,BA L ,BC L ,CA L ,CB L ——各相绕组间的互感; R ——绕组电组(假设三相相等); p ——微分算子;对于转子使用永磁材料构成的无刷直流电动机,转子的影响可忽略,可认为电感是常数,与转子位置无关, 即:C B A L L L == ;M L L L L L L CB CA BC BA AC AB ======又因为三相绕组为Y 形连接,无中线,所以任意时刻总有0=++c b a i i i 成立。
无刷直流电机(BLDC)建模与仿真

无刷直流电机(BLDC)建模与仿真文章目录o一、BLDC建模o二、BLDC仿真o三、参考文献按照最常用的定义,无刷直流电机有两种,一种是梯形波反电动势无刷直流电机,也就是通常说的BLDC,另一种是正弦波反电动势无刷直流电机,也就是PMSM。
本文只研究梯形波反电动势无刷直流电机,也就是BLDC的建模和仿真。
虽然没有PMSM控制精度高、转矩波动小,但是BLDC控制算法简单、成本低,在对转矩脉动要求不高的场合也有很广泛的应用。
一、BLDC建模最常见的无刷直流电机,其原理简单来说如下图所示:由三相逆变器、三相绕组定子、永磁转子以及位置传感器组成。
逆变器的输出与三相定子绕组连接,驱动器产生PWM控制功率器件的开合,从而产生三相旋转的方波,控制电机转动。
定子产生的磁场方向与转子磁场方向垂直才能产生最大的电磁转矩,所以在BLDC中通常需要检测转子位置,从而获取三相定子的换向时刻,驱动电机不停运转。
霍尔传感器体积小、成本低,因此用的最多。
1.1 定子和转子定子和转子的结构如下图所示:定子铁心中嵌入三相绕组,可以是Y型或△型连接方式,用的较多的是Y型连接、三相对称且无中性点引出。
绕组形式也有许多种,梯形反电动势无刷直流电机常用集中整距绕组。
而正弦波反电动势无刷直流电机常用短距分布绕组、分数槽和正弦绕组来减少转矩脉动。
转子由一定极对数的永磁体镶嵌在铁心表面或者嵌入铁心内部构成。
梯形波反电动势无刷直流电机采用瓦形磁极来产生梯形的磁通密度,从而产生梯形波反电动势;而正弦波反电动势无刷直流电机采用抛物线状永磁体来产生正弦波磁通密度。
1.2 位置传感器无刷直流电机利用电子换向器代替了有刷直流电机的机械换向器,一般来说需要位置传感器检测转子磁极位置,为电子换向器提供换向时刻信息。
而在电机中加入位置传感器会增加电机体积、增加成本,所以无位置传感器的BLDC控制技术是现在的研究热点。
无位置传感器无刷电机需要通过综合其他信息来提供换向时刻,例如最常用的是利用反电动势过零点进行换向。
无刷直流电机的建模与仿真

无刷直流电机的建模与仿真相对于传统的有刷直流电机,无刷直流电机的特点表现为:使用寿命长、效率更高、低噪声、启动转矩大等特点,在军事,伺服控制、家用电器等领域被广泛应用,文章首先研究无刷直流电机基础结构,其次分析其数学模型,并用Maltab 搭建了无刷直流电机控制系统的仿真模型,详细介绍了电机本体,转速控制,转矩计算等模块的功能和实现方法,通过仿真,证明了该模型的可行性。
标签:无刷直流电机;仿真;模型1 无刷直流电机的数学模型以两相导通星形三相六状态为例,设ua,ub,uc是三相定子电压;ea,eb,ec是三相定子反电动势,ia,ib,ic为三相定子电流,La,Lb,Lc是三相定子自感,Lab,Lac,Lba,Lba,Lca,Lca为三相定子绕组互感,Ra,Rb,Rc为三相绕组的相电阻,P为微分算子(d/dt)。
1.1 电压方程由于假设电机三相绕组完全对称,所以有ia+ib+ic=0且Mia+Mib+Mic=0,将这两个等式带入,经过化简,得到电压方程为:1.2 转矩方程无刷直流电机的转矩方程如下:?棕无刷直流电机转子的机械角速度(rad/s)无刷直流电机的机械运动方程可表示为:TL其中负载转矩(N·m);J是电机的转动惯量(Kg·m2)。
2 基于MATLAB/Simulink的无刷直流电机控制系统建模在MATLAB/Simulink环境下,在了解和分析了无刷直流电机的数学模型后,建立无刷直流电机控制系统仿真模型,该控制系统采用双闭环控制方案,转速环为外环,采用PI调节器,内环是电流环,在建模之前作以下假定:(1)不计电枢反应,换向过程等的影响;(2)磁路不饱和,忽略磁滞和涡流的影响;(3)假设三相绕组,定子电流,转子磁场分布完全对称,气隙磁场为方波;(4)假设外加电源为理想的直流恒压电源。
根据模块化的思想,系统可以由以下几个子模块构成:2.1 无刷直流电机本体无刷直流电机本体模块是关键的部分。
无刷直流电机控制系统的Proteus仿真
显示等部分组成。
图1控制系统组成框图控制系统核心及外围电路系统核心AT89S52单片机最小系统及按键电路如图2图2单片机最小系统及按键电路AT89S52芯片是8位单片机,具有廉价、实用及运算快等优点有两个定时器,两个外部中断接口,24个I/O口,一个串行口。
单片机首先进行初始化,将显示部分(转速显示、档位显示出显示地址)。
图3按键检测部分由于所需按键比较少,所以采用独立按键,使用点动开关分别实现启动(OPEN)、加速(UP)减速(DOWN)、反转(CPL)、停止(CLOSE)。
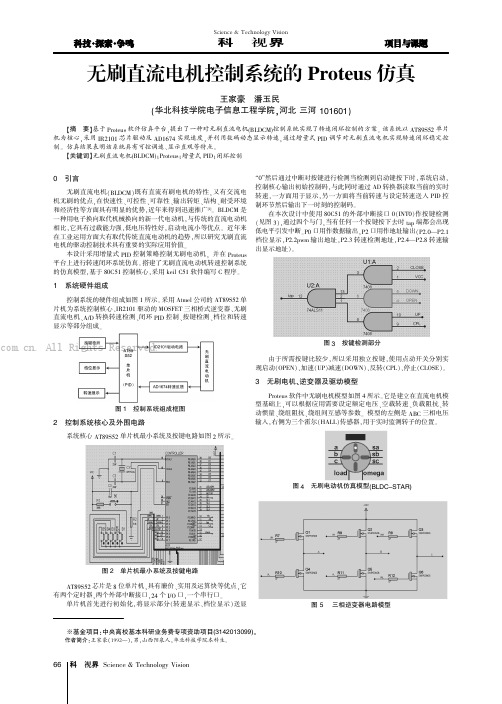
无刷电机、逆变器及驱动模型Proteus软件中无刷电机模型如图4所示。
它是建立在直流电机模型基础上,可以根据应用需要设定额定电压、空载转速、负载阻抗动惯量、绕组阻抗、绕组间互感等参数。
模型的左侧是ABC三相电压,右侧为三个霍尔(HALL)传感器,用于实时监测转子的位置无刷电动机仿真模型(BLDC-STAR)图5三相逆变器电路模型基金项目:中央高校基本科研业务费专项资助项目(3142013099)。
作者简介:王家豪(1992—),男,山西阳泉人,华北科技学院本科生. All Rights Reserved.Science&Technology Vision视界本文所提出测试。
STAR 的sa,sb,sc 输出信号,Channel D 为BLDC-STAR A 项电压输出图6Hall 传感器输出信号结语本文利用Proteus 仿真软件设计了无刷直流电机仿真控制系统完成了主控制器硬件电路、功率驱动电路、功率逆变电路、电流检测电转速检测电路的设计,通过C 语言编程在控制器实现了转速电流双闭环增量PID 控制,实现了对设定转速的恒速控制。
实验结果表明所设计的系统能够满足无刷直流电机转速控制的设计要求,取得了良好的效果,对实际硬件电路的设计具有很大的辅助作用。
【参考文献】蒋辉平.基于Proteus 的单片机系统设计与仿真实例[M].机械工业出版社2012,7.陈伯时.电力拖动自动控制系统—运动控制系统[M].机械工业出版社.2008,3.姜志海.单片机的C 语言程序设计与应用[M].电子工业出版社.2011,7.赵希梅.直流无刷电动机原理与技术应用[M].2012.刘刚.永磁无刷直流电机控制技术与应用[M].2012.彭伟.单片机C 语言程序设计实训100例:基于PIC+Proteus 仿真[M].2012.王晓明.电动机的DSC 控制:微芯公司dsPIC 应用[M].2012.李晓斌,张辉,刘建平,利用DSP 实现无刷直流电机的位置控制[J].机电工程2005(03).刘宏.基于DSP 的直流无刷电机电子调速器系统设计[J].黑龙江科技信息2009(16).叶晓霞,徐烟红,郝浩.无刷直流电机的双闭环控制仿真[J].科技创业月刊2010(12).[责任编辑:邓丽丽。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB/SIMULINK的无刷直流电动机系统仿真
0引言
无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
1无刷直流电机仿真模型
本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM 数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图
以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图
1.1 电动机本体模块
在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块
和位置检测模块。
图3 电机本体模块
1.反电势求取模块
本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图 4 反电势求取模块
Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
其中Ke为电机的反电动势系数。
具体的Lookup Table参数设置参照下表1。
表 1 位置信号和单位反电动势的关系
2.转矩计算模块
依据数学模型建立转矩计算模型如图5所示。
图5 转矩计算模块
3.中性点求取模块
求出反电动势后根据电压平衡方程来求中性点电压,具体模块如图6所示。
图6 中性点求取模块
4.转子位置检测模块
图7 转子位置检测模块
1.2 速度PID控制模块
速度控制模块采用PID调节。
图 8 PID控制模块
1.3 参考电流模块
参考电流模块的作用是根据电流幅值信号Is和位置信号pos求出三相参考电流。
参考电流模块的功能通过S函数实现。
1.4 电流滞环控制模块
电流滞环控制模块的作用是实现滞环电流控制,输入端l、2、3为三相实际电流,4、5、6为三相参考电流,输出为脉冲信号,滞环的环宽设为0-1之间。
模块结构框图如图10所示。
图 10 电流滞环控制模块
1.5 电压逆变模块
电压逆变器模块实现的是逆变器功能,输入为位置信号和电流滞环控制模块信号及电压逆变控制信号,输出为三相端电压,其中,可以通过编写S函数实现从转子位置信号得到六个MOSFET导通开关信号。
如图11所示。
三相的上桥臂控制信号与电流滞环控制模块得到的信号进行逻辑与运算,即可得到控制开关的逻辑信号,如图11所示。
由于6个MOSFET只可能同时有两个导通,且两个管不能为同相,所以可选用二选一开关来得到三相端电压,如图12所示。
在本文设计的模型中,额定电压设为72V,则端电压的一半为36V。
图 12 开关功率管模块
2仿真结果
仿真中,BLDCM参数设置为:额定转速n=120rad/s,定子相绕组电阻R=1.25欧姆,定子相绕组自感L=0.055H,互感M=0.003H,转动惯量为0.006kg.m2,反
电势系数为Ke=0.22V/rad/s。
极对数为n p=1,72V直流电源供电。
在t=0.2s时,加负载2N.m。
可得到系统转速,转矩,相电流,相反电动势仿真曲线如图13-16所示。
图13 转速响应曲线
图14 转矩响应曲线
图15 相电流波形
图16相反电动势波形
由仿真波形可以看出,在n=120rad/s参考转速下,系统响应快速且平稳相电流和反电动势波形较为理想,转矩脉动较大。
仿真结果证明了本文所提出的这种BLDCM仿真建模方法的有效性。
3总结
在Matlab/Simulink仿真环境下,可以方便地建立BLDCM的仿真模型。
对于个别新的Simulink模块,应用S函数来实现,可以充分发挥Matlab编程的灵活性与Simulink的简单直观性,加速无刷直流电动机调速系统的开发。
参考文献
[1] 兰宝华. 无刷直流电动机无位置传感器位置检测技术的研究,中南大学.
[2] 叶长青,尹华杰,赵海波.无刷直流电动机驱动系统Matlab仿真建模及模型中S函数的实
现[J].微电机.
附录
referenceCurrent.m 参考电流模块S函数:function sys=mdlOutputs(t,x,u)
if (u>=0)&(u<pi/3)
sys=[1;-1;0];
elseif (u>=pi/3)&(u<2*pi/3)
sys=[1;0;-1];
elseif (u>=2*pi/3)&(u<pi)
sys=[0;1;-1];
elseif (u>=pi)&(u<4*pi/3)
sys=[-1;1;0];
elseif (u>=4*pi/3)&(u<5*pi/3)
sys=[-1;0;1];
else
sys=[0;-1;1];
end
inverter.m 电压模块S函数:
function sys=mdlOutputs(t,x,u)
if u>=0&u<pi/3
sys=[1 0 0 1 0 0];
elseif u>=pi/3&u<2*pi/3
sys=[1 0 0 0 0 1];
elseif u>=2*pi/3&u<pi
sys=[0 0 1 0 0 1];
elseif u>=pi&u<4*pi/3
sys=[0 1 1 0 0 0];
elseif u>=4*pi/3&u<5*pi/3
sys=[0 1 0 0 1 0];
else
sys=[0 0 0 1 1 0];
end。