无刷直流电机仿真教程
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
一种基于 Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法摘要:在分析无刷直流电机(BLDC)数学模型的基础上,提出了一种无刷直流电机控制系统仿真建模的新方法。
在Matlab/Simulink环境下,把独立的功能模块和S函数相结合,构建了无刷直流电机系统的仿真模型。
系统采用双闭环控制:速度环采用离散PID控制,根据滞环电流跟踪型PWM逆变器原理实现电流控制。
仿真和试验结果与理论分析一致,验证了该方法的合理性和有效性。
此方法也适用于验证其他控制算法的合理性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:无刷直流电机;建模;仿真;电流滞环;Matlab中图分类号:TP391.9 文献标识码:A 文章编号:1004-731X (2008) 02-293-06A Method for Modeling andSimulation ofBrushless DC Motor Control System based on MatlabYIN Y un-hua, ZHENG Bin, ZHENG Hao-xin(National Key Laboratory for Electronic Measurement Technology, North University of China, Taiyuan 030051, China)Abstract: Based on the mathematical model of the Brushless DC motor (BLDC), a novel method for modeling and simulation of BLDC control system was proposed. In Matlab/Simulink, by the combination of the isolated functional blocks and S-functions, the model of BLDC could be established. In the double loop of control system, a discrete PID controller was adopted in the speed loop and a current controller was completed in the current loop on the principle of hysteresis current track PWM inverter. The reasonability and validity were testified by the coincidence of the simulation and experimentation results and theory analysis. This novel method is also suitable for verifying the reasonability of other control algorithms and offers a new thinking for designing and debugging actual motors. Key words: BLDC; modeling; simulation; hysteresis current; Matlab引言1无刷直流电机(Brushless DC Motor,以下简称BLDC)是随着电力电子技术及新型永磁材料的发展而迅速成熟起来的一种新型电机。
直流无刷电机控制系统的建模与仿真
直流无刷电机控制系统的建模与仿真发表时间:2018-08-16T16:29:01.997Z 来源:《电力设备》2018年第13期作者:徐峰赵燕[导读] 摘要:直流无刷电机是一种以电子换相装置取代机械换相装置的新型电机,其既具有直流电动机的调速性能,同时又具有交流电机结构简单、运行可靠、维护方便等优点。
(北京动力机械研究所北京 100074)摘要:直流无刷电机是一种以电子换相装置取代机械换相装置的新型电机,其既具有直流电动机的调速性能,同时又具有交流电机结构简单、运行可靠、维护方便等优点。
可在高空稀薄条件下工作,广泛应用在要求大功率重量比、响应速度快、可靠性高的随动系统中,因此非常有必要对其进一步加强研究。
基于此本文对直流无刷电机控制系统进行了建模和仿真。
关键词:直流无刷电机;控制系统;建模与仿真1、前言随着全控型电力电子器件(如IGBT、IGCT等)的出现和普及,以及微控制器技术的不断进步,交流传动技术迅速普及,各种类型的变频装置被广泛应用于交流传动的场合。
各种交流电力电子变换器的广泛应用,不仅使得各类生产设备的调速驱动、电气传动的性能要求得以满足,而且可以使越来越宝贵的电能得以节省,有效增加社会效益。
2、直流无刷电机的基本原理直流无刷电机因其具有高效率、高功率密度、易于维护等优点在近年来得到了越来越广泛的应用,而将直流无刷电机与矩阵式变换器结合组成的电力传动装置则具有两者的优点。
直流无刷电机与传统的电机在工作原理和结构构造方面均存在着差异,因此需要分析直流无刷电机的结构组成和工作原理。
本文讨论的直流无刷电机的转子为永磁材料制成的,可称为永磁直流无刷电机。
永磁直流无刷电机按驱动电流方式可分为方波驱动和正弦波驱动,按照控制方式可分为有位置传感器控制和无位置传感器控制。
本文探讨的是永磁方波型直流无刷电动机,并采用有位置传感器的方式进行控制。
永磁方波型直流无刷电机的组成可分为电机本体、转子位置传感器以及控制电机各相分别导通的功率电子开关线路。
永磁无刷直流电机的Simulink仿真

永磁无刷直流电机的Simulink仿真 对磁悬浮飞轮用无刷直流电机系统进行建模,仿真得到系统工作时各种参数、数据变化趋势和实验结果,能够有效地指导和验证控制系统的设计。
本书采用Mathworks公司的MATLAB作为仿真工具,其中的Simulink是一个用来对动态系统进行建模、仿真和分析的软件包。
使用其中的S-Function模块,结合编写C MEX S-FUNCTION,结合Simulink内含的丰富的数学运算逻辑模块和电力电子模块,能够准确地构造出磁悬浮飞轮用无刷直流电机及其控制模型。
在Simulink中对无刷直流电机仿真建模,国内外已进行了广泛的研究。
电机绕组反电动势波形可采用FFT法和有限元法实现,尽管这种方法得到的反电动势波形比较精确,但结合控制系统仿真时会极大地影响仿真速度。
此外,可以根据能够反映转子位置变化的绕组电感模块来获得反电动势波形,但如果永磁无刷直流电机的相电感极小,转子位置变化引起的电感变化量可忽略,那么该方法对小电枢电感的永磁无刷直流电机的建模并不适用;也可以使用分段线性法实现梯形波反电动势,并采取一些改进的仿真方法实现电机控制系统模型。
但在这些文献中,电机的换相是基于电流滞环控制的,需要三个电流互感器测量三相电流,具体实现时成本较高,开关噪声较大。
另外,在永磁无刷直流电机系统仿真时,应体现出脉宽调制(PWM)的作用。
从仿真结果来看,上述模型基本上还是属于模拟控制系统。
以上这些模型与目前永磁无刷直流电机控制普遍采用的基于数字信号处理器(DSP)的转速、电流双闭环数字控制系统不符合。
本文中系统模型根据实际磁悬浮飞轮用无刷直流电机DSP数字控制系统构建。
实际系统采用TI公司的DSP TMS320LF2407作为主控制器,IR2130作为三相逆变桥的驱动芯片,MOSFET管IRF3710组成三相逆变桥,对直流电源输出的母线电流进行采样,DSP输出6路脉宽调制PWM信号对电机的相电流和转速进行控制。
无刷直流电机模糊PI控制系统建模与仿真
无刷直流电机模糊PI控制系统建模与仿真摘要:从无刷直流电机(bldcm)的工作原理和结构出发,在分析了bldcm数学模型的基础上,采用模块化方法,在matlab/simulink 中建立了bldcm 转速、电流双闭环控制系统模型。
利用该模型进行了电机动静态性能的仿真研究,仿真结果与理论分析一致,表明该方法建立的bldcm控制系统仿真模型合理、有效。
该模型简单、直观、参数易于修改和替换,可方便地用于其他控制算法仿真研究。
关键词:无刷直流电机;matlab/simulink;双闭环控制系统模型;仿真模型随着新型永磁材料、自动控制技术、电力电子技术以及电子技术的迅速发展,无刷直流电机(bldcm)也随之发展起来并已成熟为一种新型的机电一体化设备,它是现代工业设备中重要的运动部件。
无刷直流电机采用电子换相器替代直流电机的机械换向器,实现直流到交流的逆变,采用位置传感器控制绕组电流的切换,既保持了直流电机的良好调速特性,又具有交流电机结构简单、运行可靠、维护方便的特点。
bldcm以体积小、速度高、可靠性好等优点广泛地应用于航空航天、机器人、电动汽车、仪器仪表、家用电器以及数控装置等领域[1]。
近年来,无刷直流电机的应用领域不断扩大,其控制系统的要求也随之越来越高。
无刷直流电机控制系统设计的过程中,为了缩短设计周期、降低研究成本和风险,通常先采用计算机仿真技术,建立无刷直流电机控制系统的仿真模型,分析电机转速、转矩等参数变化情况,研究整个电机系统的各类定量关系, 提取设计、分析和调试电机及其驱动系统所需数据,施加不同的控制算法以寻求最佳参数,有效地节省控制系统设计时间,加快了实际系统设计和调试的进程[2]。
1无刷直流电机的数学模型由于无刷直流电机的气隙磁场、反电动势以及电流是非正弦的,因此,采用直、交轴坐标变换已不是有效的分析方法。
而在分析和仿真bldcm控制系统时,直接利用电机原有的相变量来建立数学模型却比较方便,又能获得较准确的结果。
无刷直流电机控制系统的仿真
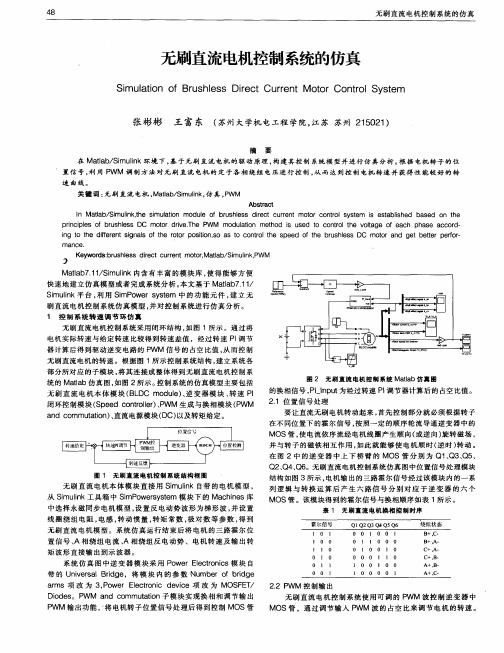
a n d c o mmu t a t i o n ) 、 直 流 电源模 块 ( D C) 以及 转 矩 给定 。
在 图 2中 的 逆 变 器 中 上 下 桥 臂 的 MOS 管 分 别 为 Q1 、 Q 3 、 Q5 、
Q2 、 Q4 、 Q 6 。无 刷直 流 电机控 制 系 统 仿 真 图 中位 置 信号 处 理 模块
无 刷 直 流 电 机 控 制 系 统 的 仿 真
无刷直流电机控制系统的仿真
Si mu l a t i o n o f B r u s h l e s s Di r e c t Cu r r e n t Mo t o r Co n t r o l Sy s t e m
的换 相信 号 , P I — I n p u t 为经 过 转 速 P l 调 节器 计 算 后 的 占空 比值 。 2 . 1 位 置 信 号 处 理 要 让 直流 无 刷 电 机 转动 起 来 , 首先 控 制 部 分 就 必 须 根据 转 子 在 不 同位 置 下 的霍 尔 信 号 , 按 照 一定 的顺 序 轮 流 导 通逆 变器 中 的 MOS管 , 使 电流 依 序 流 经 电 机线 圈产 生 顺 向( 或逆 向) 旋转磁场 , 并 与 转 子 的磁 铁 相 互 作 用 , 如 此 就 能 够 使 电机 顺 时 ( 逆时 ) 转动 。
i n g t o t he di fer en t s i gn al s o f t h e r ot or po s i t i o n, S O as t o co n t r ol t h e s pe e d of t h e b r u s hl es s DC m o t or a n d g e t be t t e r pe r f or —
无刷直流电机仿真教程
基于MATLAB/SIMULINK的无刷直流电动机系统仿真0引言无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
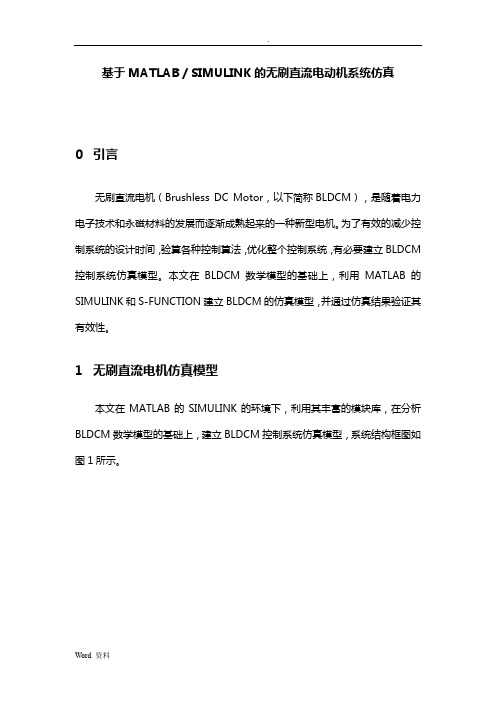
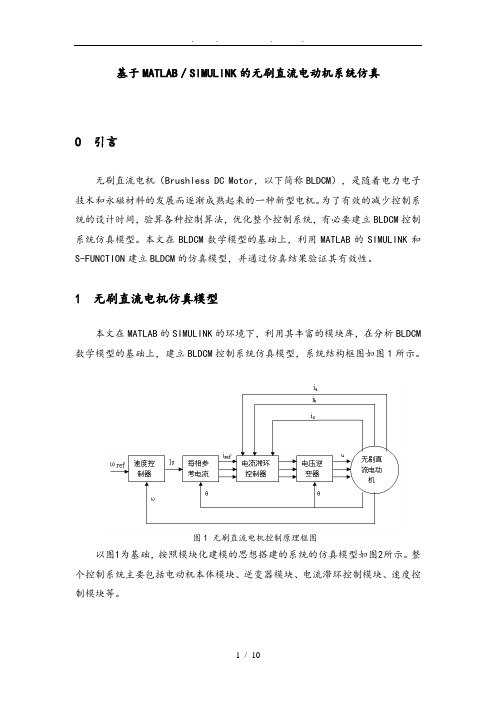
1无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1电动机本体模块在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1.反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
永磁无刷直流电动机的设计和仿真研究

永磁无刷直流电动机的设计和仿真研究一、本文概述本文旨在全面探讨永磁无刷直流电动机(Permanent Magnet Brushless DC Motor, PMBLDCM)的设计和仿真研究。
永磁无刷直流电动机作为现代电力驱动系统的关键组件,具有高效率、高功率密度、低噪音和低维护成本等诸多优点,因此在电动汽车、航空航天、家用电器等领域得到了广泛应用。
本文将从理论基础、设计原则、仿真方法、优化策略等多个方面,对永磁无刷直流电动机的设计和仿真进行深入研究。
本文将概述永磁无刷直流电动机的基本工作原理和结构特点,为后续的设计研究和仿真分析奠定理论基础。
接着,重点讨论电动机设计过程中的关键因素,包括绕组设计、磁路设计、热设计以及电磁兼容性设计等,并提出相应的设计原则和优化策略。
在此基础上,本文将探讨基于数值计算的仿真分析方法,包括有限元分析、电路仿真、热仿真等,以评估电动机的性能和可靠性。
本文将总结永磁无刷直流电动机设计和仿真研究的最新进展,展望未来的发展趋势和研究方向。
通过本文的研究,旨在为读者提供一套完整的永磁无刷直流电动机设计和仿真分析框架,为推动该领域的技术进步和应用发展做出贡献。
二、永磁无刷直流电动机的基本原理与特点永磁无刷直流电动机(Permanent Magnet Brushless DC Motor, PMBLDCM)是一种结合了直流电机与无刷电机技术的先进电动机类型。
其基本原理在于利用永久磁铁产生的恒定磁场作为电机的励磁场,并通过电子换向器实现电流的换向,从而实现电机的连续旋转。
这种设计消除了传统直流电机中的机械换向器和电刷,显著提高了电机的运行效率和可靠性。
高效率:由于消除了机械换向器和电刷,减少了能量损失和摩擦,使得PMBLDCM具有更高的运行效率。
高转矩密度:永磁体产生的恒定磁场使得电机在相同体积下能够产生更大的转矩。
良好的调速性能:通过电子换向器,可以实现对电机转速的精确控制,满足各种应用需求。
无刷直流电机控制系统的仿真与分析
无刷直流电机控制系统的仿真与分析一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效、低噪音、长寿命等优点,已广泛应用于电动汽车、无人机、家用电器等众多领域。
然而,无刷直流电机的控制系统设计复杂,涉及电子技术、控制理论、电机学等多个学科领域,因此,对其进行深入研究和仿真分析具有重要意义。
本文旨在探讨无刷直流电机控制系统的基本原理、仿真方法以及性能分析。
将简要介绍无刷直流电机的基本结构和控制原理,包括其电机本体、电子换向器、功率电子电路等关键部分。
将详细介绍无刷直流电机控制系统的仿真建模过程,包括电机模型的建立、控制算法的设计以及仿真环境的搭建。
通过对仿真结果的分析,评估无刷直流电机控制系统的性能,包括动态响应、稳态精度、效率等指标,并提出优化建议。
本文的研究不仅有助于深入理解无刷直流电机控制系统的运行机制和性能特点,还可为实际工程应用提供理论支持和指导。
通过仿真分析,可以预测和优化无刷直流电机控制系统的性能,提高系统的稳定性和可靠性,推动无刷直流电机在更多领域的应用和发展。
二、无刷直流电机控制系统基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器替代传统机械换向器的直流电机。
其控制系统主要由电机本体、电子换向器(也称为功率电子电路或逆变器)以及控制器三部分组成。
无刷直流电机控制系统的基本原理,就在于如何准确地控制逆变器的开关状态,从而改变电机内部的电流流向,实现电机的连续旋转。
控制器根据电机的运行状态和用户的输入指令,生成适当的控制信号。
这些控制信号是PWM(脉宽调制)信号,用于控制逆变器的开关状态。
逆变器一般由六个功率开关管(如MOSFET或IGBT)组成,分为三组,每组两个开关管串联,然后三组并联在直流电源上。
每组开关管分别对应电机的一个相(A、B、C),通过控制每组开关管的通断,可以改变电机每相的电流大小和方向。
无刷直流电机调速系统的建模与仿真分析
无刷直流电机调速系统的建模与仿真分析摘要:本文基于电机运行方程建立无刷直流电机的仿真模型,对无刷直流电机的转速环、电流环双环控制策略进行仿真,通过仿真结果验证无刷直流电机仿真模型的有效性以及控制策略的有效性。
主题词:无刷直流电机;建模;仿真;控制。
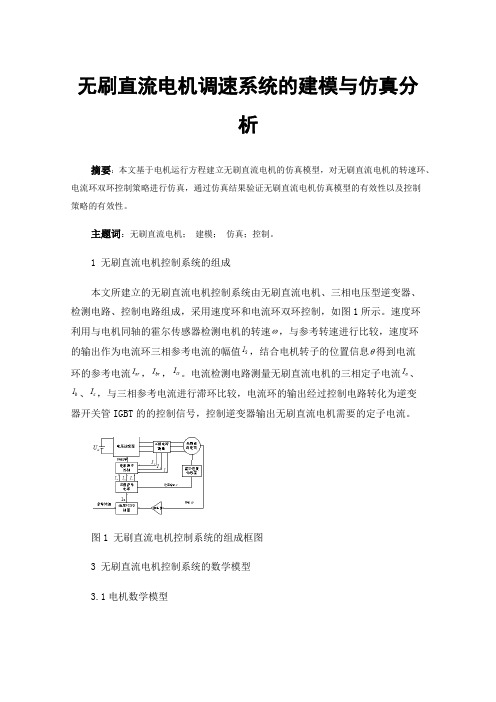
1 无刷直流电机控制系统的组成本文所建立的无刷直流电机控制系统由无刷直流电机、三相电压型逆变器、检测电路、控制电路组成,采用速度环和电流环双环控制,如图1所示。
速度环利用与电机同轴的霍尔传感器检测电机的转速,与参考转速进行比较,速度环的输出作为电流环三相参考电流的幅值,结合电机转子的位置信息得到电流环的参考电流,,。
电流检测电路测量无刷直流电机的三相定子电流、、,与三相参考电流进行滞环比较,电流环的输出经过控制电路转化为逆变器开关管IGBT的的控制信号,控制逆变器输出无刷直流电机需要的定子电流。
图1 无刷直流电机控制系统的组成框图3 无刷直流电机控制系统的数学模型3.1电机数学模型无刷直流电机定子绕组为三相Y型接法,两两导通方式,驱动电路采用三相全桥逆变电路。
为了方便分析BLDCM的数学模型及电磁转矩等特性,作如下假设[2]:(1)三相绕组完全对称,气隙磁场分布为梯形波,平顶宽为120°电角度;(2)忽略齿槽、换相过程和电枢反应的影响;(3)磁路不饱和,不计涡流和磁滞损耗;(4)电枢绕组在定子内表面均匀连续分布。
3.1.1 电压平衡方程BLDCM的电压平衡方程如公式1所示。
(1)式中,、、——定子各相电压,单位:V;——定子电阻,单位:;、、——定子各相电流,单位:A;,——定子电感,互感,单位:H;、、——各相反电势,单位:V。
3.1.2 转矩方程和机械运动方程BLDCM的转矩方程如公式2所示,机械运动方程如公式3所示。
(2) (3)式中,——电磁转矩,单位;——电机转子减速度,单位rad/s;——负载转矩;单位为;——转动惯量,单位为;——阻尼系数,单位为。
无刷直流电机仿真
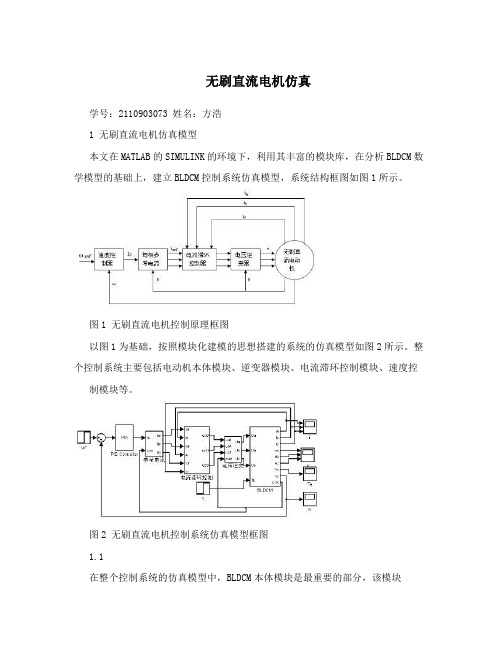
无刷直流电机仿真学号:2110903073 姓名:方浩1 无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i,i,abi必须首先求得三相反电动势信号e,e,e,整个电动机本体模块的结果如下图cabc3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1. 反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图 4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360?内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
其中Ke为电机的反电动势系数。
具体的Lookup Table参数设置参照下表 1。
表 1 位置信号和单位反电动势的关系0 60 120 180 240 300 360 位置A 1 1 1 -1 -1 -1 1B -1 -1 1 1 1 -1 -1C 1 -1 -1 -1 1 1 1 2. 转矩计算模块依据数学模型建立转矩计算模型如图5所示。
图5 转矩计算模块3. 中性点求取模块求出反电动势后根据电压平衡方程来求中性点电压,具体模块如图6所示。
使用Simulink进行无刷直流电机控制仿真

使用Simulink进行无刷直流电机控制仿真无刷直流电机是一种常用于各种工业自动化和机器人应用中的电机类型。
与传统的直流电机相比,无刷直流电机具有较高的效率、较低的噪音和较长的寿命。
Simulink是一种功能强大的工具,用于进行动态系统建模和仿真。
在Simulink中,可以使用Simscape Power Systems工具箱对无刷直流电机进行模拟和控制。
在进行无刷直流电机控制仿真之前,首先需要建立电机的数学模型。
无刷直流电机的数学模型可以由电磁动力学定律得出。
模型包括电机的旋转动力学和电磁动力学部分。
电机的旋转动力学部分描述了转子速度和转矩之间的关系,而电磁动力学部分描述了电机的电流和磁场之间的关系。
建立无刷直流电机的数学模型后,可以在Simulink中进行仿真。
在Simulink中,可以使用不同的模块来模拟电机的不同部分,如电压源、电流控制器和速度控制器等。
可以使用电压源模块来模拟电机的输入电压,使用电流控制器模块来模拟电机的电流控制,使用速度控制器模块来模拟电机的速度控制。
此外,还可以使用作用在电机上的外部负载模块来模拟电机的负载情况。
在进行无刷直流电机控制仿真时,可以使用控制器来调整电机的输入电压和输出速度,以实现所需的转矩和速度控制。
在Simulink中,可以使用PID控制器模块来实现电机的控制。
PID控制器可以根据电机的输入电压和输出速度之间的误差来调整控制信号,以使电机的输出速度达到预期的目标值。
在完成无刷直流电机控制仿真后,可以使用Simulink中的数据可视化工具来分析仿真结果。
可以绘制电机输入电压、输出速度和负载转矩等变量随时间的变化曲线,以评估电机控制系统的性能。
总之,使用Simulink进行无刷直流电机控制仿真可以帮助工程师更好地了解电机的工作原理和性能。
通过仿真,可以优化电机控制系统的设计参数,提高电机的性能和效率。
同时,仿真还可以减少现场试验的时间和成本。
因此,Simulink是进行无刷直流电机控制仿真的理想工具。
永磁无刷直流电机计算与仿真
定义网格剖分(续)
设置求解选项
运动设置
• Setup Solution/Motion Setup • 设置运动对象:选定对象Band ,点击 Set Band • 机械参数设置:点击Mechanical Setup
运动设置(续)
• 初始位置设置为 120 度:要使A相初相位为0,在初始位 置,要保证A相磁势轴线与磁钢磁势轴线方向相反。
永磁无刷直流电动机计算与仿真
参考文献:ANSOFT应用笔记《A Permanent Magnet Brushless DC Motor Problem》 以一个4极550W无刷直流电动机为例,讲述如何 应用RMxprt完成设置、求解及结果分析。求解完 成后,以RMxprt 的输出结果为基础,在瞬态有限 元求解器EMpulse中对电机特性做更详细分析。 郑满华 08年5月
• 打开网格剖分器
定义网格剖分(续)
• 设置所有面和对象种子值为2mm Mesh/Seed/Surface Mesh/Seed/Object • 执行剖分Mesh/Make • 修改剖分结果,将Band对象三角形数改为 1000(Refine/Object.) • 使master , slave边界匹配 Mesh/Line Match
创建感应电压波形图(续)
创建感应电压波形图(续)
A
创建感应电压波形图(续)
A
创建感应电压波形图(续)
创建感应电压波形图(续)
机械瞬态分析
将A ,B 相绕组电阻由 4.5 GΩ 改为4.5Ω 将直流电源电压由0 V改为220V. Setup Solution/Motion Setup Mechanical Setup,数据在RMxprt的Design Output 的FEA Transient Input Data数据项中
无刷直流电机控制系统的设计及仿真2
目录一、前言二、系统方案设计1、系统设计要求 (2)2、系统总体框架 (3)3、主电路供电方案选择 (3)4、逆变电路的选择 (4)三、基于MC33035的无刷直流电动机调速系统 (5)1、MC33035无刷直流电动机控制芯片 (5)2、基于MC33035的无刷直流电动机调速系统设计 (7)四、无刷直流电机调速系统的MATLAB仿真 (9)1、电源、逆变桥和无刷直流电机模型 (10)2、换相逻辑控制模块 (10)3、PWM调制技术 (14)3.1、等脉宽PWM法 (16)3.2、SPWM(Sinusoidal PWM)法 (16)4、控制器和控制电平转换及PWM发生环节设计 (17)5、系统的仿真、仿真结果的输出及结果分析 (18)5.1、起动,阶跃负载仿真 (18)5.2、可逆调速仿真 (20)一、前言无刷直流电机的发展直流电动机由于其在运动控制领域的卓越扭矩特性已得到广泛应用,与传统的直流电动机和机械毛刷,可靠性差的需要,减刑会产生电磁干扰,噪声,火花,无线电干扰和寿命短的致命弱点,具有较高的生产成本和维修问题的严重影响,如联合直流电动机控制系统的进一步发展的弊端。
随着社会生产力,人民生活水平不断提高的发展,他们不断开发新类型的电机。
科学技术的进步,新兴技术和新材料,同时也进一步推动电动汽车将继续推出新产品。
对于传统的直流电机,只要30年早在20世纪的上述缺点,人们开始开发一个电子交流始终以取代无刷直流电动机刷机,并提出相应数量的结果。
但是,这只是高功率处于发展的初级阶段的电子设备,没有找到理想的电子换向元件。
使这个运动只能停留在实验室研究阶段,没有推广。
1955年,美国四哈里森,谁首先提出了晶体管使用该电机接替该专利申请的机械换向器,这是现代无刷直流电动机的原型。
但是,因为没有马达的起动转矩,使其不能成为产品。
后来,经过多年的艰苦工作的人,终于由霍尔元件实现无刷直流电动机换意味着在1962年来,创造了直流无刷电机产品的时代。
使用Simulink进行无刷直流电机控制仿真

使⽤Simulink进⾏⽆刷直流电机控制仿真这段时间刚开始接触Matlab中的Simulink仿真,我就结合⾃⼰的专业,利⽤Simulink进⾏了⽆刷直流电机的仿真,因为Simulink⼯具箱⾥⾯有很多可⽤的模块,所以建模过程变得⾮常简单。
在Matlab界⾯中new->model之后,找到Simulink Library Browser,这⾥⾯有系统⾃带的很多模块,接下来我们就需要找到⾃⼰所需要的模块了,了解⽆刷直流电机的⼯作原理以后,接下来就是找到直流电源、三相逆变桥、⽆刷直流电机模型。
⽽Simulink中也有这些模型,可以直接通过搜索关键字找到它们,分别是DC Voltage Source、Universal Bridge、Permanent Magnetic Synchronous Machine。
接下来就是需要将相应的信号连接起来,如下图其中,直流端电压可以设置电压⼤⼩,逆变桥可以选择开关器件类型,我们这⾥选择Mosfet,PMSM中我们将反电势波形选择trapezoidal即梯形波,电机参数相电阻、相电感、反电势常数、极对数按实际值设置。
Universal Bridge对应如下桥式拓扑结构。
然后就是添加相应的负载Tm,这⾥可以模拟突加负载和突减负载以及任意变化的负载,通过给定⼀个函数就可以。
然后就是开关信号g,下⾯会详细介绍。
模型搭建完成后如下图。
PMSM输出端给的信号通过Bus Selector选择,我们需要使⽤的是三相霍尔信号得到相应的开关逻辑,这也是该仿真的关键所在,其中整个模型中Subsystem1就是实现开关逻辑的算法。
我们可以根据霍尔换相真值表,通过相应的逻辑门实现,但是这样搭建模型显得不灵活⽽且很累赘,并且不能模拟超前或者滞后换相。
所以我这⾥才⽤的是通过Matlab Function来实现的。
如上图,这是换相逻辑的模型,其中我采⽤的是下桥臂恒通,上桥臂PWM调制的⽅式导通Mosfet,⽬前占空⽐的给定⽅式采⽤的是常数,后续可以根据转速环进⾏PI给定。
无刷直流电机(BLDC)建模与仿真

无刷直流电机(BLDC)建模与仿真文章目录o一、BLDC建模o二、BLDC仿真o三、参考文献按照最常用的定义,无刷直流电机有两种,一种是梯形波反电动势无刷直流电机,也就是通常说的BLDC,另一种是正弦波反电动势无刷直流电机,也就是PMSM。
本文只研究梯形波反电动势无刷直流电机,也就是BLDC的建模和仿真。
虽然没有PMSM控制精度高、转矩波动小,但是BLDC控制算法简单、成本低,在对转矩脉动要求不高的场合也有很广泛的应用。
一、BLDC建模最常见的无刷直流电机,其原理简单来说如下图所示:由三相逆变器、三相绕组定子、永磁转子以及位置传感器组成。
逆变器的输出与三相定子绕组连接,驱动器产生PWM控制功率器件的开合,从而产生三相旋转的方波,控制电机转动。
定子产生的磁场方向与转子磁场方向垂直才能产生最大的电磁转矩,所以在BLDC中通常需要检测转子位置,从而获取三相定子的换向时刻,驱动电机不停运转。
霍尔传感器体积小、成本低,因此用的最多。
1.1 定子和转子定子和转子的结构如下图所示:定子铁心中嵌入三相绕组,可以是Y型或△型连接方式,用的较多的是Y型连接、三相对称且无中性点引出。
绕组形式也有许多种,梯形反电动势无刷直流电机常用集中整距绕组。
而正弦波反电动势无刷直流电机常用短距分布绕组、分数槽和正弦绕组来减少转矩脉动。
转子由一定极对数的永磁体镶嵌在铁心表面或者嵌入铁心内部构成。
梯形波反电动势无刷直流电机采用瓦形磁极来产生梯形的磁通密度,从而产生梯形波反电动势;而正弦波反电动势无刷直流电机采用抛物线状永磁体来产生正弦波磁通密度。
1.2 位置传感器无刷直流电机利用电子换向器代替了有刷直流电机的机械换向器,一般来说需要位置传感器检测转子磁极位置,为电子换向器提供换向时刻信息。
而在电机中加入位置传感器会增加电机体积、增加成本,所以无位置传感器的BLDC控制技术是现在的研究热点。
无位置传感器无刷电机需要通过综合其他信息来提供换向时刻,例如最常用的是利用反电动势过零点进行换向。
无刷直流电机仿真教程
基于MATLAB/SIMULINK的无刷直流电动机系统仿真0引言无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
1无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM 数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1电动机本体模块在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号ia ,ib,ic必须首先求得三相反电动势信号ea ,eb,ec,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1.反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图 4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
其中Ke为电机的反电动势系数。
基于自抗扰控制(ADRC)的无刷直流电机控制与仿真

一、研究意义1.研究意义由于无刷直流电机在四旋翼飞行器控制中的关键作用以及在生产实践中日益广泛的应用,设计快速且平稳的控制系统成为首要任务。
目前, 基于现代控制理论的高性能异步电机调速方法主要是依靠精确的数学模型加上传统的P ID控制。
PID控制实际应用效果较好,但又无法避免对负载变化的适应能力差、抗干扰能力弱和受系统参数变化影响等弱点,而且交流调速系统具有非线性、强耦合、多变量及纯滞后等特性, 很难用精确的数学模型描述, 这就使得基于精确数学模型的传统控制方法面临严重的挑战。
另外, 经典P ID控制需要根据运行工况的不同而调节控制器参数, 无刷直流电机又具有数学模型复杂,非线性等特点,这给现场调试增加了难度。
2.国内外研究状况及发展(1)无刷直流电机基本控制方法无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。
直流无刷电动机的电机本身是机电能量转换部分,无刷电机的转子上装有永磁体,定子上是电枢,与有刷电机正好是相反的。
它除了电机电枢、永磁励磁两部分外,还带有传感器。
电机本身是直流无刷电机的核心,它不仅关系到性能指标、噪声振动、可靠性和使用寿命等,还涉及制造费用及产品成本。
由于采用永磁磁场,使直流无刷电机摆脱一般直流电机的传统设计和结构,满足各种应用市场的要求,并向着省铜节材、制造简便的方向发展。
直流无刷驱动器包括电源部及控制部,电源部提供三相电源给电机,控制部则依需求转换输入电源频率。
电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器(converter)转成直流。
不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(inverter)转成3相电压来驱动电机。
换流器(inverter)一般由6个功率晶体管(V1~V6)分为上臂(V1、V3、V5)/下臂(V2、V4、V6)连接电机作为控制流经电机线圈的开关。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB/SIMULINK的无刷直流电动机系统仿真
0引言
无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
1无刷直流电机仿真模型
本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图
以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图
1.1电动机本体模块
在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块
1.反电势求取模块
本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图4 反电势求取模块
Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
其中Ke为电机的反电动势系数。
具体的Lookup Table参数设置参照下表1。
表1 位置信号和单位反电动势的关系
位置0 60 120 180 240 300 360
A 1 1 1 -1 -1 -1 1
B -1 -1 1 1 1 -1 -1
C 1 -1 -1 -1 1 1 1
2.转矩计算模块
依据数学模型建立转矩计算模型如图5所示。
图5 转矩计算模块
3.中性点求取模块
求出反电动势后根据电压平衡方程来求中性点电压,具体模块如图6所示。
图6 中性点求取模块4.转子位置检测模块
图7 转子位置检测模块1.2速度PID控制模块
速度控制模块采用PID调节。
图8 PID控制模块
参考电流模块的作用是根据电流幅值信号Is和位置信号pos求出三相参考电流。
参考电流模块的功能通过S函数实现。
图9 参考电流模块
1.4电流滞环控制模块
电流滞环控制模块的作用是实现滞环电流控制,输入端l、2、3为三相实际电流,4、5、6为三相参考电流,输出为脉冲信号,滞环的环宽设为0-1之间。
模块结构框图如图10所示。
图10 电流滞环控制模块
电压逆变器模块实现的是逆变器功能,输入为位置信号和电流滞环控制模块信号及电压逆变控制信号,输出为三相端电压,其中,可以通过编写S函数实现从转子位置信号得到六个MOSFET导通开关信号。
如图11所示。
图11 电压逆变模块
三相的上桥臂控制信号与电流滞环控制模块得到的信号进行逻辑与运算,即可得到控制开关的逻辑信号,如图11所示。
由于6个MOSFET只可能同时有两个导通,且两个管不能为同相,所以可选用二选一开关来得到三相端电压,如图12所示。
在本文设计的模型中,额定电压设为72V,则端电压的一半为36V。
图12 开关功率管模块
2仿真结果
仿真中,BLDCM参数设置为:额定转速n=120rad/s,定子相绕组电阻R=1.25欧姆,定子相绕组自感L=0.055H,互感M=0.003H,转动惯量为0.006kg.m2,反电势系数为Ke=0.22V/rad/s。
极对数为n p=1,72V直流电源供电。
在t=0.2s时,加负载2N.m。
可得到系统转速,转矩,相电流,相反电动势仿真曲线如图13-16所示。
.
图13 转速响应曲线图14 转矩响应曲线图15 相电流波形
.
图16相反电动势波形
由仿真波形可以看出,在n=120rad/s参考转速下,系统响应快速且平稳相电流和反电动势波形较为理想,转矩脉动较大。
仿真结果证明了本文所提出的这种BLDCM仿真建模方法的有效性。
3总结
在Matlab/Simulink仿真环境下,可以方便地建立BLDCM的仿真模型。
对于个别新的Simulink模块,应用S函数来实现,可以充分发挥Matlab编程的灵活性与Simulink的简单直观性,加速无刷直流电动机调速系统的开发。
参考文献
[1] 兰宝华. 无刷直流电动机无位置传感器位置检测技术的研究,中南大学.
[2] 叶长青,尹华杰,赵海波.无刷直流电动机驱动系统Matlab仿真建模及模型中S函数的实
现[J].微电机.
.
附录
referenceCurrent.m 参考电流模块S函数:function sys=mdlOutputs(t,x,u)
if (u>=0)&(u<pi/3)
sys=[1;-1;0];
elseif (u>=pi/3)&(u<2*pi/3)
sys=[1;0;-1];
elseif (u>=2*pi/3)&(u<pi)
sys=[0;1;-1];
elseif (u>=pi)&(u<4*pi/3)
sys=[-1;1;0];
elseif (u>=4*pi/3)&(u<5*pi/3)
sys=[-1;0;1];
else
sys=[0;-1;1];
end
inverter.m 电压模块S函数:
function sys=mdlOutputs(t,x,u)
if u>=0&u<pi/3
sys=[1 0 0 1 0 0];
elseif u>=pi/3&u<2*pi/3
sys=[1 0 0 0 0 1];
elseif u>=2*pi/3&u<pi
sys=[0 0 1 0 0 1];
elseif u>=pi&u<4*pi/3
sys=[0 1 1 0 0 0];
elseif u>=4*pi/3&u<5*pi/3
sys=[0 1 0 0 1 0];
else
sys=[0 0 0 1 1 0];
end
Word 资料。