无刷直流电动机启动过程的Matlab仿真
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
无刷直流电动机启动过程的Matlab仿真

无刷直流电动机启动过程的Matlab仿真
张会焱
【期刊名称】《《电脑知识与技术》》
【年(卷),期】2009(005)010
【摘要】该文主要讨论的是无刷直流电动机启动仿真。
首先建立了无刷直流电动机的数学模型,然后详细讨论了无刷直流电动机的三相导通三相星形六状态下磁势随电流流向的改变而改变的情形并给出了启动过程的动态仿真。
最后给出了仿真的结果。
该文还讨论了电动机参数改变情况下的仿真结果的变化。
【总页数】4页(P2706-2709)
【作者】张会焱
【作者单位】上海海事大学上海200135
【正文语种】中文
【中图分类】TP3
【相关文献】
1.三相无刷直流电动机分数槽集中绕组槽极数组合规律研究(连载之五)降低永磁无刷直流电动机齿槽转矩的设计措施 [J], 谭建成
2.无刷直流电动机驱动系统Matlab仿真建模及模型中S函数的实现 [J], 叶长青;尹华杰;赵海波
3.无刷直流电动机的MATLAB仿真模型 [J], 沙琳;车延博
4.基于DSP2812的无刷直流电动机控制及其MATLAB仿真 [J], 周立媛;韩文波;
薛书飞
5.无刷直流电动机启动过程的Matlab仿真 [J], 张会焱
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于 Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法摘要:在分析无刷直流电机(BLDC)数学模型的基础上,提出了一种无刷直流电机控制系统仿真建模的新方法。
在Matlab/Simulink环境下,把独立的功能模块和S函数相结合,构建了无刷直流电机系统的仿真模型。
系统采用双闭环控制:速度环采用离散PID控制,根据滞环电流跟踪型PWM逆变器原理实现电流控制。
仿真和试验结果与理论分析一致,验证了该方法的合理性和有效性。
此方法也适用于验证其他控制算法的合理性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:无刷直流电机;建模;仿真;电流滞环;Matlab中图分类号:TP391.9 文献标识码:A 文章编号:1004-731X (2008) 02-293-06A Method for Modeling andSimulation ofBrushless DC Motor Control System based on MatlabYIN Y un-hua, ZHENG Bin, ZHENG Hao-xin(National Key Laboratory for Electronic Measurement Technology, North University of China, Taiyuan 030051, China)Abstract: Based on the mathematical model of the Brushless DC motor (BLDC), a novel method for modeling and simulation of BLDC control system was proposed. In Matlab/Simulink, by the combination of the isolated functional blocks and S-functions, the model of BLDC could be established. In the double loop of control system, a discrete PID controller was adopted in the speed loop and a current controller was completed in the current loop on the principle of hysteresis current track PWM inverter. The reasonability and validity were testified by the coincidence of the simulation and experimentation results and theory analysis. This novel method is also suitable for verifying the reasonability of other control algorithms and offers a new thinking for designing and debugging actual motors. Key words: BLDC; modeling; simulation; hysteresis current; Matlab引言1无刷直流电机(Brushless DC Motor,以下简称BLDC)是随着电力电子技术及新型永磁材料的发展而迅速成熟起来的一种新型电机。
基于MatlabSimulink的无刷直流电机控制仿真研究
摘要:基于Matlab/Simulink,本文设计了一个无刷直流电机的控制方案,详细阐述了无刷直流电机的运行原理,并用Matlab/Simulink对其进行了仿真。
实验证明,用Matlab/Simulink开发的平台能够有效地实现对无刷直流电机的控制。
关键词:Matlab/Simulink仿真工具;无刷直流电机;仿真平台;脉冲宽度调制随着汽车电子器件的飞速发展、车用电控单元(ECU)的日新月异,无刷直流电机在汽车电器设备中的应用受到了越来越多的重视。
无刷直流电机具有寿命长、效率高等特点,且适合很多高档汽车。
同时,车内环境的复杂很多机械安装的困难,在不宜安装转子磁极位置传感器的地方,必须使用无位置传感器策略驱动无刷直流电机。
本文将介绍一种基于Matlab/Simulink的无刷直流电机的仿真方法。
无刷直流电机运行原理本文采用理想化的无刷直流电机模型,它具有如下特点:电机定子绕组排列空间对称;各相电气参数,如定子每相电阻、每相自感以及相间互感均相同;电机永磁体转子产生的磁场在电机气隙中的空间分布为理想梯形,且平顶部分维持120°电角度;逆变器的功率开关(MOSFET或者IGBT)的导通电阻为零,关断电阻无穷大,导通与关断均不需要时间。
图1说明了理想无刷直流电动机的运行原理。
从图1中可以看出,当永磁体转子处于图1(b)中的0位置时,定子C相和B相上感应出的反电动势分别处在正负平顶部分,此时通过触发功率开关S5和S6使得B相绕组反向导通,C相绕组正向导通,直流电源通过逆变器向B相和C相馈入直流电,且此时两相绕组中电流幅值相等、方向相反,ic=-ib。
当永磁体转子又继续旋转了60 缃嵌龋珻相的反电动势波形的平顶部分结束,A相反电动势开始进入平顶部分,因此要进行C相到A相的换相,此时关断逆变器C相上桥臂的功率开关,同时触发A相上桥臂功率开关,如果忽略换相电流的动态过程,逆变器立刻向B相和A 相馈入直流电。
matlab电机仿真精华50例
matlab电机仿真精华50例Matlab是一种功能强大的仿真软件,它被广泛应用于电机仿真领域。
在这篇文章中,我们将介绍Matlab电机仿真的50个精华例子,帮助读者更好地了解和应用电机仿真技术。
1. 直流电机的仿真:通过Matlab可以模拟直流电机的性能,包括转速、扭矩和电流等。
2. 交流电机的仿真:使用Matlab可以模拟交流电机的工作原理,包括转子和定子的相互作用。
3. 同步电机的仿真:通过Matlab可以模拟同步电机的运行特性,包括电压和频率的控制。
4. 步进电机的仿真:利用Matlab可以模拟步进电机的运行过程,包括步进角度和步进速度等。
5. 无刷直流电机的仿真:通过Matlab可以模拟无刷直流电机的工作原理,包括转子和定子的相互作用。
6. 电机控制系统的仿真:利用Matlab可以模拟电机控制系统的运行过程,包括速度和位置的闭环控制。
7. 电机噪声的仿真:通过Matlab可以模拟电机噪声的产生和传播过程,帮助优化电机的设计。
8. 电机故障诊断的仿真:利用Matlab可以模拟电机故障的发生和诊断过程,提供故障检测和排除的方法。
9. 电机热仿真:通过Matlab可以模拟电机的热传导和散热过程,帮助优化电机的散热设计。
10. 电机振动的仿真:利用Matlab可以模拟电机的振动特性,帮助优化电机的结构设计。
11. 电机效率的仿真:通过Matlab可以模拟电机的能量转换过程,评估电机的效率和能耗。
12. 电机启动过程的仿真:利用Matlab可以模拟电机的启动过程,包括起动电流和启动时间等。
13. 电机负载仿真:通过Matlab可以模拟电机在不同负载条件下的工作特性,帮助优化电机的设计。
14. 电机饱和仿真:利用Matlab可以模拟电机在饱和状态下的工作特性,提供更准确的仿真结果。
15. 电机电磁干扰的仿真:通过Matlab可以模拟电机产生的电磁干扰对其他设备的影响,提供干扰抑制的方法。
16. 电机电磁场的仿真:利用Matlab可以模拟电机内部的电磁场分布,帮助优化电机的设计。
基于Matlab的直流电动机机械曲线仿真

基于Matlab的直流电动机机械曲线仿真简介本文档旨在介绍如何使用Matlab进行直流电动机机械曲线仿真。
直流电动机是一种常见的电动机类型,广泛应用于工业和家庭设备中。
通过仿真直流电动机的机械曲线,我们可以更好地理解电动机的性能和特性。
准备工作在开始之前,确保您已经安装了Matlab软件,并且对该软件有基本的了解。
此外,您还需要获取直流电动机的相关参数,例如额定电压、额定电流、空载转速等。
仿真步骤以下是使用Matlab进行直流电动机机械曲线仿真的步骤:1. 定义电动机参数:根据您的直流电动机参数,使用Matlab 定义相关变量,例如额定电压、额定电流、电动机常数等。
2. 建立模型:使用Matlab建立直流电动机的机械模型。
这可以通过电动机的等效电路图来实现,包括电阻、电感、电动机常数等。
3. 设置仿真参数:定义仿真的时间范围和步长。
您可以根据需要选择适当的时间范围和步长。
4. 编写仿真代码:使用Matlab编写仿真代码,通过求解电动机的动态方程来模拟电动机的运行过程。
在每个时间步长内,更新电动机的状态变量,例如转速、电流等。
5. 运行仿真:运行仿真代码,观察直流电动机的机械曲线。
您可以绘制电动机的转速随时间的变化曲线,以及电流随时间的变化曲线。
6. 分析结果:根据仿真结果,分析直流电动机的性能和特性。
您可以观察到电动机的起动过程、稳定状态和负载变化时的响应等。
总结通过使用Matlab进行直流电动机机械曲线仿真,我们可以更好地了解电动机的性能和特性。
这对于设计和优化电动机系统非常重要。
请根据您的实际需求和直流电动机的参数,进行相应的仿真和分析工作。
无刷直流电机控制系统的Matlab仿真
c nrl c e o t h me (p e o p b I du trc n tuec r n o p t h lcr y trs e uao o sit) b i i os s e d lo y PD a jso o si t,ur tIo o te ee tc h see i rg ltrc n tue t e i s t ul n dg
文献 [ ] 1 介绍 了 B D L CM 的 总 体 建模 思 路 , 给 出 基 本 模块 并 的构 建形 式 , 部 分 模 块 的 函数 表 现 形 式 , 有 介 绍 如 何 具 体 实 但 没 现 。 献 [ ] 转 矩计 算 时 , 文 2在 未考 虑 阻尼 系数 的因 素 。 文献 [ ] 以 3可
反 电势 [。 ”
BD L CM 控 制 系 统 仿 真 模 型 ,包 括 速度 控 制 模块 、参 考 电 流 模
块 、 流 滞 环 控 制 模 块 、 压 逆 变 器 模 块 、 L CM 本 体 模 块 和 电 电 BD
为 了将 转 速 转换 为旋 转 一 周 的位 置 ,本 文 采 用 将 得 到 的 角
无 刷 直 流 电 机控 制 系 统 的 Malb仿 真 t a
无刷直流电机控制系统的 Mal t b仿真 a
Si lt n f B u he s DC mua i o r s ls o Mo o n r lS se t r Co to y t m s d o Ma l b Ba e n t a
Ab tac sr t
T ou h b u hl s hr gh t e r s es DC mo o c to s se ,pu s f r r h ba k emf o tolm e h t r onr l y tm t o wa d t e c c n r t od. a i, r u l ea s g— Th t st o gh i h n r e
基于MATLAB的无刷直流电机控制系统建模与仿真
( 1 ) 定 子 绕 组 为 6 0 相 带 整 距 集 中绕 组
三 相六 状态
:
,
Y
形连接
,
(2 ) 忽 略 磁 路 饱 和 (3 ) 忽 略 齿 槽 效 应
,
不 计 涡流 和 磁滞损耗
;
,
不 考虑 电枢反 应
;
,
气 隙磁 场 分 布
为梯形 波
,
平顶 宽为 电角度
(4 ) 三 相 绕 组 完 全 对 称 2 1 三
图 5所 示 。
T e
图 l
电压 方 程模 块
B
3 . 2反 电动势模 块
由 图 2的 反 电 动 势 波 形 ,结 合 L o o k — u p T a b l e生 成 三 相绕 组 中的 反 电 动势 模 块 ,如 图 3所 示 。
-
从而造成定
i
-
2
3
.
因 此 将 B L D CM 三 相 方
-
,
因为 d
q
方 程 适 用 于 气 隙磁
驾
场 为正 弦分 布 的 电动 机
量
.
。
所 以 直 接 利用 电动 机 原 有 的相 变
。
醪一
^亿
=
一
i
~
+
ib+ i
。
=
0
一
口
6 C
一
1
。
㈨ ∽ 憎 J
● ● ●
●
(2 ) (3 )
(4 )
,
,
、
从 而 避 免 了在求取 Te 时分母 为零 造 成 积 分 器输 出错
,
组 自感
基于MATLAB直流电机起动设计与仿真-课程设计资料

物理与电子工程学院《电力拖动自动控制系统》课程设计报告书设计题目:直流电机起动设计与仿真专业:自动化xxx班级: 2014xxxxx本1班学生姓名: xxxxxxxx学号: 20140343121指导教师: xxxxxxxxxx2015年10月25 日物理与电子工程学院课程设计任务书专业:自动化班级:14xxxx1班摘要直流电动机具有调速范围广、调速平稳、过载能力强以及启动和制动转矩大等优点,在工农业生产中得到了广泛的应用。
文章研究了直流电动机串电阻起动方法,在直流电动机电枢绕组中串入电阻来降低起动电流和起动转矩。
相比于电机直接起动,串入电阻起动起动电流和起动转矩显著减低,而且成本又增加不多,在实际工农业生产中有广泛的应用,在课程设计中总共设了3级电阻,第一级电阻R1=0.518,第二季电阻R2=0.32,第三级电阻R3=0.162。
关键词:直流电动机;直接启动;串电阻启动;仿真;目录1 任务提出与方案论证 (1)1.1提出任务 (1)1.2方案论证 (1)2 总体设计 (1)2.1系统总体原理框图 (1)2.2直流电动机直接起动真模型仿真的建立 (2)2.3直流电动机串电阻起动真模型仿真的建立 (5)2.4直流电动机串电阻起动时电阻值计算以及仿真结果分析 (5)3 心得体会 (13)1 任务提出与方案论证1.1提出任务直流电动机刚与电源接通的瞬间,转子尚未转动起来时,他励和串励电动机的电枢电流以及并励和复励电动机的输入电流称为起动电流,这时的电磁转矩称为起动转矩。
一般情况下,在额定电压下直接起动时,起动电流可达电枢电流额定值的10~20倍,起动转矩也能达到额定转矩的10~20倍,这样的起动电流是换向所不允许的,而且过大的起动转矩会使电动机和它所拖动的生产机械遭受突然的巨大冲击,以致损坏传动机械和生产机械。
由此可见,除了额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、电枢电阻大以及转动惯量又比较小,可以直接起动以外,一般的直流电动机是不允许采用直接起动的。
基于matlab无刷直流电机驱动控制系统的仿真本科设计论文
基于matlab无刷直流电机驱动控制系统的仿真摘要:在分析无刷直流电机(BLDCM)数学模型的基础之上,提出了一种新型的无刷直流电机控制系统建模仿真方法。
在Matlab /Simulink环境之下,利用无刷直流电机的电压方程、电磁转矩方程和运动方程构建了无刷直流电机本体的仿真模型。
系统采用单闭环控制:速度环采用经典PI控制,电流控制采用滞环电流跟踪型PWM。
仿真实验结果表明:系统具有良好的静、动态特性,验证了该方法的有效性,为实际电机控制系统的设计和调速提供了新的思路。
关键词:无刷直流电机;模型;simulink;仿真;霍尔位置传感器;引言电机在人类社会中的应用已有近100 多年的历史,电机的发展是从永磁电机开始的。
诞生于19 世纪20 年代的第一台电机便是一台永磁发电机,但由于材料的制约,在随后的岁月里,永磁电机逐渐被电励磁电机所取代,而交流异步电机的出现并广泛应用,进一步压缩了永磁电机的应用空间。
直至上世纪60 年代稀土永磁材料的出现,影响永磁电机广泛使用的材料问题得以基本解决,永磁电机又开始被广泛关注。
但由于稀土材料昂贵的价格,永磁电机仅应用在对成本要求相对较低的场合。
上世纪80 年代初,新型永磁材料钕铁硼的出现,大大降低了永磁体的成本,永磁电机才在较多的场合得到了应用。
无刷直流电动机是在有刷直流电动机的基础上发展起来的。
现阶段,虽然各种交流电动机和直流电动机在传动应用中占主导地位,但无刷直流电动机正受到自20世纪90年代以来,随着人们生活水平的提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都越来越趋向于高效率化、小型化及高智能化,作为执行元件的重要组成部分,电机必须具有精度高、速度快、效率高等特点,无刷直流电机的应用也因此而迅速增长。
随着永磁电机的广泛应用,其本身的缺陷也逐渐体现出来。
传统的永磁电机往往使用电刷这种机械部件作为换向器,在运行过程中,电刷带来了换向火花、电磁干扰等问题;同时,电刷换向器极易磨损,造成了永磁电机维护频率高,维护过程复杂;机械式电刷换向器还限制了电机转速的提高和体积的缩小。
无刷直流电机的驱动与MATLAB仿真
无刷直流电机的驱动与MATLAB仿真摘要:无刷直流电动机的最本质特征就是没有机械换向结构,取而代之的是逻辑电路和功率开关线路共同组成的电子换相器,它把直流电逆变成交流电并按一定的次序通入电动机的定子绕组中以产生与定子磁场正交的转子磁场。
在使用中无刷直流电机相比有刷电机有许多的优点,比如:能获得更好的扭矩转速特;性高速动态响应;高效率;长寿命;低噪声;高转速。
本文主要研究了无刷直流电机调速系统的基本方法,主要内容有无刷直流电机的基本原理,脉宽调速系统的原理和控制方法,在此基础上重点研究了无刷直流电机的换相控制,并对无刷直流电动机调速系统进行设计。
最后利用MATLAB\Simulink——面向电气原理结构图的仿真技术,设计了一个转速单闭环无刷直流电机可逆脉宽调速系统,对其进行仿真,并根据仿真结果分析研究无刷直流电动机。
关键词:调速,PWM控制,无刷直流电动机,仿真一引言目前国内外对无刷直流电机的(Brushless DC Motor,BLDCM)的定义有两种:一种是认为只有梯形波/方波无刷直流电机才可被称为无刷直流带电机,而正弦波无刷直流电机则被称为永磁同步电机(Permanent Magnet Synchronous Motor,PMSM);另一种定义认为梯形波/方波无刷直流电机都是无刷直流电机。
本论文采用第一种定义,仅认为反电动势波形为梯形波/方波的无刷直流电机称为无刷直流电机。
目前国内外无刷直流电机的一般控制技术应经比较成熟,但日本和美国具有较先进的无刷直流电机制造与控制技术。
特别是日本在民用方面较为突出,而美国则在军工方面更加先进。
当前的研究热点主要集中在以下三个方面:①研究无位置传感器控制技术以提高系统可靠性,并进一步缩小电机尺寸与重量;②从电机设计和控制方法等方面出发,研究无刷直流电机转矩波动抑制从而提高其伺服,扩大应用范围;③设计可靠小巧,通用性强的集成化无刷直流电机控制器。
二无刷直流电动机原理2.1 无刷直流电动机概述无刷直流电动机机属于同步电动机的一种,这就意味着它的定子产生的磁场和转子产生的磁场是同频率的,所以无刷直流电机并不会产生普通感应电机的频差现象。
无刷直流电机控制系统的matlab仿真
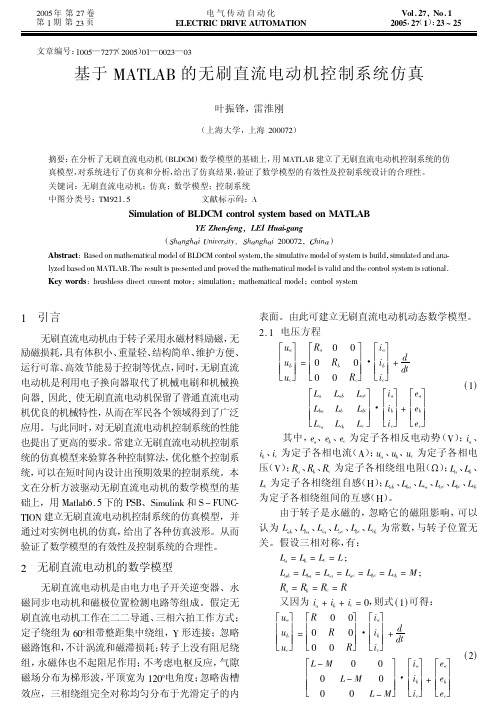
÷ (A e + B e + c P) “ ~A — B — c
求得 三相反 电势信号 。电压 方程式 如 ( ) 1 所示 :
分别 定义 为定 子 A、 B和 C三相 绕组 的 电阻 , 且
有R =R :R R。L 、 L B c: L 、 分别 定义 为定 子 A、 B 和 c三相绕组 的 自感 , 且设 L L = =L ; 定 义 为定 £
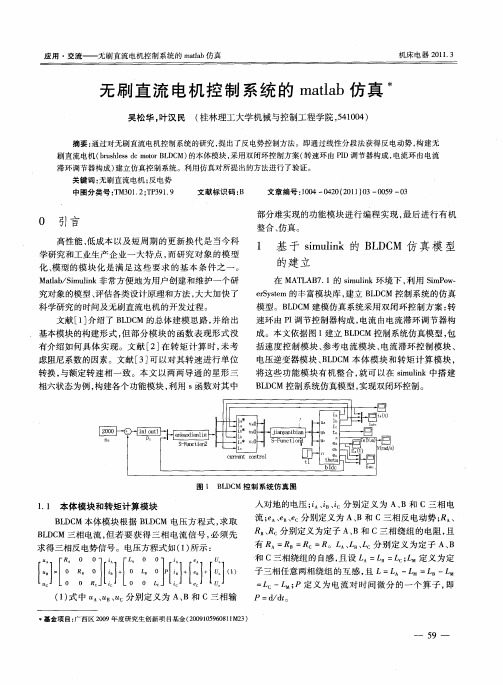
eSs m的丰 富模 块库 , ryt e 建立 B D M 控制 系统 的仿 真 LC 模 型 。B D M 建模仿 真系统采用 双 闭环控 制方案 : LC 转
速环 由 P 调节 控制器构成 , I 电流 由电流滞环 调节器 构 成 。本文依据 图 1建立 B D M控制 系统仿 真模 型 , LC 包 括速 度控 制模 块 、 参考 电 流模块 、 电流滞环 控制 模块 、 电压 逆变器模 块 、 L C 本 体 模块 和 转 矩计 算模 块 , BDM 将这 些功 能模 块 有机 整 合 , 就可 以在 s uik中搭 建 i l m n
1
=
系统模型 。把得 到 的 B D M 本体模 块 和转 矩计 算 LC 模 块构建 的仿真 图如图 2所示 。
反 电势 的 S函数主程序 如下 :
fn tnss u c o =md up t(, ,) i y l tus tx u O
i U> = & f ( O u<p 3 i /
相六状态 为例 , 构建各个 功能模块 , 用 s 利 函数对 其 中
B D M 控制 系统 仿真模 型 , LC 实现双 闭环控制 。
J
} . 『 面
Sutn - i v Fc。 卜 a -ni I Fco c. ut U 2 c 01 ni * _ e
Matlab对直流电动机特性曲线的仿真模拟

Matlab对直流电动机特性曲线的仿真模
拟
介绍
本文档旨在介绍如何使用Matlab对直流电动机的特性曲线进行仿真模拟。
通过仿真模拟,我们可以更好地了解直流电动机的性能和特性,并进行相关分析。
步骤
1. 导入必要的库和数据
在开始之前,我们需要导入Matlab所需的相关库和数据。
确保你已经安装了Matlab并且具备相关的电动机特性数据。
2. 定义电动机参数
根据你所拥有的电动机特性数据,定义电动机的相关参数,包括额定电压、额定电流、额定转速等。
3. 编写模拟代码
使用Matlab编写模拟代码,根据电动机的参数和特性数据,
模拟电动机的运行过程。
可以使用电动机的等效电路模型来进行仿真。
4. 运行模拟
运行编写好的模拟代码,观察仿真结果。
可以绘制电动机的转
速-负载曲线、转矩-负载曲线等,以便进一步分析电动机的性能。
5. 分析结果
根据模拟结果进行分析,了解电动机在不同负载下的性能表现。
可以计算电动机的效率、功率因素等指标,进一步评估电动机的性能。
注意事项
- 在进行仿真模拟时,需要确保电动机的参数和特性数据准确
无误。
- 在编写模拟代码时,遵循Matlab的语法规范,确保代码的正
确性和可读性。
- 在分析结果时,根据实际需求选择合适的指标和方法,以得
到准确的结论。
以上是关于使用Matlab对直流电动机特性曲线进行仿真模拟的简要介绍和步骤。
希望对你有所帮助!。
基于matlab的直流无刷电机控制系统的仿真

关键词: 关键词: 直流无刷电机,控制系统,仿真
3
上海工程技术大学毕业设计
基于 Matlab 的直流无刷电机控制系统仿真
Simulation Of Brushless DC Motor Control System Based On Matlab
ABSTRACT
More than a century, Electric motor act as electrical energy conversion device,its use has spread in all fields of national economy and people's daily life.There are main types of motor synchronous motor, asynchronous motor and DC motors.DC motor has high efficiency and good speed
1
上海工程技术大学毕业设计
基于 Matlab 的直流无刷电机控制系统仿真
(1) 数学模型 …………………………………………………………… 28 (2) 仿真模型 …………………………………………………………… 29 (3) 模块检测………………………………………………………………30 2.1.2 电压逆变器仿真模块…………………………………………… 32 (1) 数学模型 …………………………………………………………… 32 (2) 仿真模型……………………………………………………………… 33 (3) 模块检测……………………………………………………………… 34 2.1.3 译码器仿真模块………………………………………………… 35 (1) 数学模型 …………………………………………………………… 35 (2) 仿真模型……………………………………………………………… 36 (3) 模块检测……………………………………………………………… 36 2.1.4 PWM 波形仿真模块……………………………………………… 37 (1) 数学模型 …………………………………………………………… 38 (2) 仿真模型 …………………………………………………………… 39 (3) 模块检测……………………………………………………………… 39 3 实例仿真 ……………………………………………………………… 40
基于MATLAB的无刷直流电动机控制系统仿真
i a e a ・ L6c i6 + e6 L c i c ec
( l)
2 无刷直流电动机的数学模型
无刷直流电动机是由电力电子开关逆变器、永 磁同步电动机和磁极位置检测电路等组成。假定无 刷直流电动机工作在二二导通、 三相六拍工作方式; 定子绕组为 60 相带整距集中绕组,Y 形连接;忽略 磁路饱和, 不计涡流和磁滞损耗; 转子上没有阻尼绕 组, 永磁体也不起阻尼作用; 不考虑电枢反应, 气隙 忽略齿槽 磁场分布为梯形波, 平顶宽为 l20 电角度; 效应,三相绕组完全对称均匀分布于光滑定子的内
U ! Ud Ut
" !t
图 4 PWM 信号
图 6 转子转速波形
" !t
3. 7 BLDCM 控制系统控制器模块 BLDCM 控制系统采用串级控制,分为速度环 (外环) 和电流环 (内环) 。内环和外环均采用 PI 算 法, 保证系统为无静差系统, 并且有较好的动态和 静态特性。 3. 8 电源和逆变器模块 电源采用 MATLAB 中的 DC 电源模块; 逆变器 采用 IGBT 功率开关器件模块。组合上述各个模块 就可以建立无刷直流电动机控制系统的仿真模型, 如图 5 所示。
function sys = mdlOutputs ( t , X , u ) p = 3. 1415926; if rem ( u , 2$p ) < p / 6 sys = 0; elseif rem ( u , 2$p ) < 5$p / 6 sys = 1; else sys = 0; end
2005 年 第 l 期
叶振锋, 雷淮刚
基于MATLAB的直流电动机分级起动仿真分析

基于MATLAB的直流电动机分级起动仿真分析直流电动机负载在工矿企业里有较广泛的应用,常用于重要安全设备的驱动,为确保设备安全的最后保障;分析优化直流电动机起动情况,加快泵组起动速度,对设备安全将有很大帮助。
关键字:直流电动机;起动;仿真直流电动机(direct current machine)是指能将直流电能转换成机械能的旋转电动机。
它是能实现直流电能和机械能转换的电动机。
直流电动机负载在工矿企业里有较广泛的应用,常用于重要安全设备的驱动,为确保设备安全的最后保障;分析优化直流电动机起动情况,加快泵组起动速度,对设备安全将有很大帮助;一般情况下大容量直流电动机均采用分级起动方式,由于电动机参数与负载参数均有差异,故在此仅用一常见直流他励电动机模型仿真后得出趋势,供分析参考。
从波形中可看出:1、缩短第一级电阻切除时间,起动电流I’1较之前有较大上升,主要体现在第二级电阻切除时。
2、缩短第二级电阻切除时间,第二级电阻切除时电流有所上升,但未超出第一级电阻切除时的电流。
3、缩短第三级电阻切除时间,未有明显变化。
4、三级电阻切除时间全部缩短时,起动电流I’1、I’2有较明显上升,幅度与缩短第一级起动时间时相仿。
5、第三级电阻切除时间大幅减少时,起动电流I’3也有超过I’1。
从以上结果可以得出以下结论:1、缩短三级电阻切除时间时,转矩均能达到要求,不会对电动机起动时间造成负面影响。
2、三级电阻切除时间中,对起动电流影响最大的是T1,最小的是T3;对起动转矩影响最大的是T2,最小的是T3。
因此,在优化电动机起动时间的角度看,缩短第一级电阻切除时间虽然能提高转矩,但对电动机起动电流影响较大,影响电动机状态;缩短第二级电阻切除时间综合效果最佳,但应合理掌握尺度;缩短第三级电阻切除时间效果也较好,且对电动机状态影响最小,但同样,也需合理掌握尺度;最佳方式为第二级电阻切除时间以其电流I’2不超过I’1为最佳,第三级电阻切除时间可较大幅度缩短。
直流电动机的MATLAB仿真
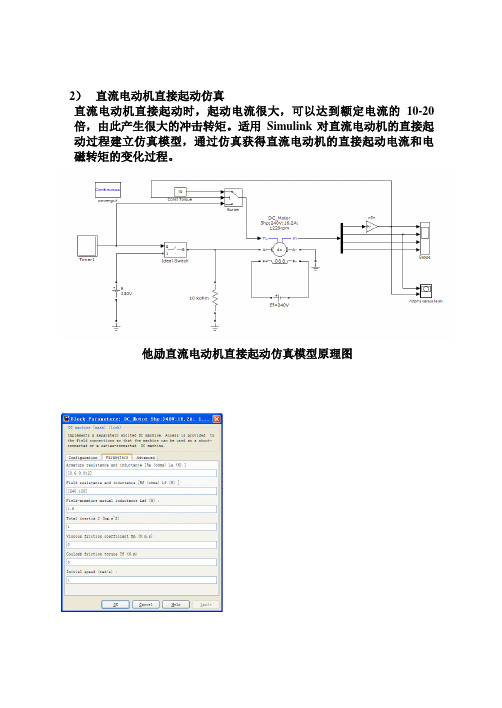
2)直流电动机直接起动仿真直流电动机直接起动时,起动电流很大,可以达到额定电流的10-20倍,由此产生很大的冲击转矩。
适用Simulink对直流电动机的直接起动过程建立仿真模型,通过仿真获得直流电动机的直接起动电流和电磁转矩的变化过程。
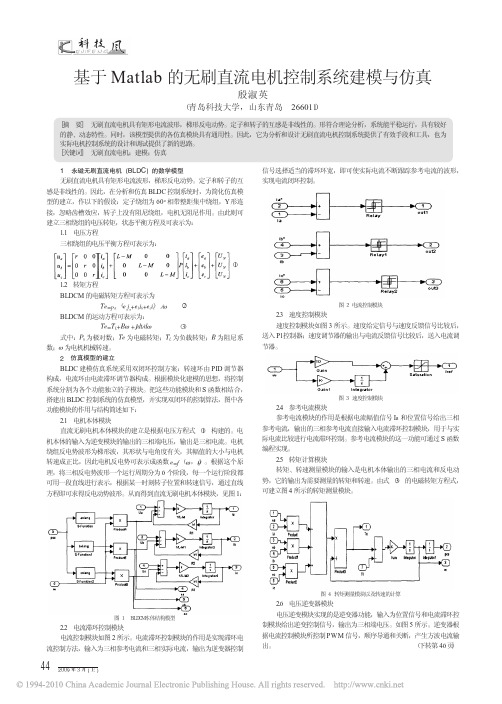
他励直流电动机直接起动仿真模型原理图直流电动机模块参数设置图直流电源模块参数设置图定时模块参数设置图开关模块参数设置图他励直流电动机直接起动转速—电流关系仿真结果他励直流电动机直接起动仿真结果3)直流电动机电枢串联电阻启动仿真建立他励直流电动机电枢串联三级电阻起动的仿真模型,仿真分析其串联电阻起动过程,获得起动过程的电枢电流.转速和电磁转矩的变化曲线。
他励直流电动机串起电阻启动仿真模型原理图他励直流电动机串起电阻仿真他励直流电动机串起电阻起动的转速—电流关系仿真结果4)直流电动机能耗制动仿真能耗制动时,电枢通过电阻Rb短接,使用Simulink建立直流电动机的能耗制动仿真模型,仿真分析获得转速。
电枢电流和电磁转矩的暂态过程曲线。
他励直流电动机能耗制动仿真模型原理图他励直流电动机能耗制动仿真结果5)直流电动机反接制动仿真直流电动机的反接制动分为电压反向的反接制动和倒拉反接制动。
电压反向反接制动作用用于电动机的快速停机,而倒拉反接制动用于低速下放位能负载。
使用Simulink建立直流电动机的电压反向反接制动的仿真模型,仿真分析获得转速。
电枢电流和电磁转矩的暂态过程曲线。
他励直流电动机电压反向反接制动仿真模型原理图他励直流电动机电压反向反接制动仿真结果6)直流电动机改变电枢电压调速仿真使用Simulink建立直流电动机的改变电枢电压的仿真模型,仿真分析获得转速。
电枢电流和电磁转矩的暂态过程曲线。
他励直流电动机改变电枢电压调速仿真模型原理图他励直流电动机改变电枢电压调速仿真结果他励直流电动机改变励磁电压仿真模型原理图第三章 MALTAB基本操作一、目的:1.掌握MATLAB的基本操作、常用命令。
基于Matlab的无刷直流电机控制系统建模与仿真
[摘要]无刷直流电机具有矩形电流波形,梯形反电动势。
定子和转子的互感是非线性的。
形符合理论分析,系统能平稳运行,具有较好的静、动态特性。
同时,该模型提供的各仿真模块具有通用性。
因此,它为分析和设计无刷直流电机控制系统提供了有效手段和工具,也为实际电机控制系统的设计和调试提供了新的思路。
[关键词]无刷直流电机;建模;仿真基于Matlab 的无刷直流电机控制系统建模与仿真殷淑英(青岛科技大学,山东青岛266011)1永磁无刷直流电机(BLDC )的数学模型无刷直流电机具有矩形电流波形,梯形反电动势。
定子和转子的互感是非线性的。
因此,在分析和仿真BLDC 控制系统时,为简化仿真模型的建立,作以下的假设:定子绕组为60o 相带整距集中绕组,Y 形连接,忽略齿槽效应,转子上没有阻尼绕组,电机无阻尼作用。
由此则可建立三相绕组的电压转矩,状态平衡方程及可表示为:1.1电压方程三相绕组的电压平衡方程可表示为:(1)1.2转矩方程BLDCM 的电磁转矩方程可表示为Te=p n (e a i a +e b i b +e c i c)/ω(2)BLDCM 的运动方程可表示为:Te=T L +B ω+Jdt /d ω(3)式中:P n 为极对数;Te 为电磁转矩;T L 为负载转矩;B 为阻尼系数;ω为电机机械转速。
2仿真模型的建立BLDC 建模仿真系统采用双闭环控制方案:转速环由PID 调节器构成,电流环由电流滞环调节器构成。
根据模块化建模的思想,将控制系统分割为各个功能独立的子模块。
把这些功能模块和S 函数相结合,搭建出BLDC 控制系统的仿真模型,并实现双闭环的控制算法,图中各功能模块的作用与结构简述如下:2.1电机本体模块直流无刷电机本体模块的建立是根据电压方程式(1)构建的。
电机本体的输入为逆变模块的输出的三相端电压,输出是三相电流。
电机绕组反电势波形为梯形波,其形状与电角度有关,其幅值的大小与电机转速成正比,因此电机反电势可表示成函数e=f (ω,θ)。
无刷直流电机的matlab仿真
机电技术 2011年8月60作者简介:程勇(1979-),男,讲师,主要研究方向:电机控制,智能算法研究。
无刷直流电机的matlab 仿真程 勇(西安科技大学,陕西 西安 710054)摘 要:首先分析了无刷直流电机数学模型,结合matlab 软件对直流无刷电机调速系统进行了仿真研究和分析,最后给出了仿真波形,验证了模型准确可靠。
关键词:直流无刷电机;matlab ;调速中图分类号:TM33 文献标识码: A 文章编号:1672-4801(2011)04-06-02直流无刷电机转子为永磁材料,随定子磁场同步转动。
这种电机结构简单而且解决了普通直流电机物理电刷等缺点。
随着永磁材料不断发展,直流无刷电机应用越来越广泛[1]。
本文详细分析了无刷直流电机模型后,通过MATLAB 仿真实现直流无刷电机的调速仿真系统。
通过仿真结论可知,文中的BLDCM 模型准确可靠,具有一定的应用价值。
1 直流无刷电机基本特性直流无刷电动机三相定子电压的平衡方程式可用下列状态方程表达[5]:0000A s A AABAC A A B s B BA B BC B B C s C CACBC C C u R i L L L i e u R i L L L P i e u R i L L L i e ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦(1)式中, A u 、B u 、C u 为定子相绕组电压;A i 、B i 、C i 为定子相绕组电流;A e 、B e 、C e 为定子绕组电动势;A L 、B L 、C L 为每相绕组的自感;AB L 、AC L 、BA L 、BC L 、CA L 、CB L 为每两相绕组间互感;P 为微分算子。
由电动机结构决定,在一个360°电角度(机械上为一对磁极距),转子的磁阻不随转子位置变化而变化,并假定三相对称,则有:AB BA AC CA BC CB L L L L L L M ====== A B C L L L L ===式中,M 为无刷直流电动机定子绕组间互感。