AMESim与Simulink联合仿真设置步骤与仿真实例
基于AMESim的双离合器变速器建模及其在Simulink中的仿真

基于AMESim的双离合器变速器建模及其在Simulink中的仿真本文将介绍如何使用AMESim建立双离合器变速器的模型,并将该模型导入到Simulink中进行仿真。
首先,我们需要了解双离合器变速器的原理。
双离合器变速器是一种现代化、高效的变速器,它采用两个独立的离合器,一个用于连接发动机和变速器,另一个用于连接变速器和驱动轴。
这使得换挡更加平滑,可以在未中断动力输出的情况下进行换挡,使车辆更加平稳。
为了建立模型,我们需要使用AMESim。
我们将双离合器变速器分为三个部分建模:发动机,变速器和驱动轴。
其中,发动机的模型可以基于已有的发动机模型进行建立,变速器的模型可以基于实际的硬件构造进行仿真,驱动轴的模型可以根据实际情况进行建立。
在建立发动机和驱动轴的模型之后,我们需要建立双离合器变速器的模型。
首先,我们需要确定离合器状态,即判断变速器处于换挡状态还是正常运行状态。
如果处于换挡状态,我们需要确保发动机和驱动轴之间的连接处于断开状态。
如果处于正常运行状态,我们需要确保发动机和变速器以及变速器和驱动轴之间的离合器处于连接状态。
建立模型后,我们需要将其导入到Simulink中进行仿真。
在Simulink中,我们可以调整模型参数来优化模型性能,例如:更改离合器接触时间,调整变速器齿轮比等。
总之,使用AMESim可以建立双离合器变速器的模型,并将其导入到Simulink中进行仿真。
通过调整模型参数,我们可以优化模型性能,使其更加接近实际情况。
这对于汽车工程师来说是非常有用的,可以帮助他们更好地设计和开发双离合器变速器。
此外,双离合器变速器还具有许多其他的优点。
例如,它可以实现快速的换挡,降低能耗,提高汽车的燃油效率,同时还能提高驾驶的舒适度。
因此,双离合器变速器正在逐渐取代传统的手动和自动变速器,成为汽车行业的主流变速器类型。
而使用AMESim建立双离合器变速器模型的优点也是十分明显的。
首先,AMESim具有强大的建模能力,可以准确地描述各种汽车系统的物理和控制特性。
Simulink_modelsim联合仿真
simulink/modelsim联合仿真XX学生的师傅2016年5月13日Simulink/Modelsim 联合仿真操作步骤本人使用的matlab版本为:matlab R2014a ; modelsim版本为:Modelsim SE-64 10.1c。
以下内容是参考自matlab帮助文档,结合自己第一次联合仿真的经验得出,如有不到之处,不能帮助解决问题还请原谅。
第一次使用markdown,如阅读体验不好,你咬我啊以下正文1.新建目录2.在matlab中配置cosimulation block1.在matlab中运行cosimWizard。
2.按要求配置。
3.在simulink或matlab中搭建仿真模型4.从matlab或simulink中启动modelsim两种方法:•在matlab中运行vism或vism('socketsimulink'),4449 ,其中4449为端口号,根据实际情况确定。
之后需在modelsim中加载verilog文件,并输入vsimulink work.uq_pmsm ,其中uq_pmsm为实体名,根据实际情况替换。
•双击simulink中的Launch HDL Simulator块启动modelsim。
以下两种情况: - 方法一启动实体仿真、方法二modelsim加载实体完成后,若一直显示loading。
- 直接在simulink中运行仿真时出现错误,提示change port。
可进入任务管理器结束lmutil.exe进程。
黑科技,不确保有效。
5.在simulink中启动仿真,此时modelsim会同步进行仿真。
AMEsim与Matlab_simulink联合仿真技术
目录摘要 (1)0 引言 (1)1 联合仿真技术 (2)1.1 联合仿真技术的特点与应用 (2)1.2 联合仿真技术的实现途径 (2)2 联合仿真接口技术 (3)2.1 系统环境配置 (3)2.2 系统编译器配置 (3)3 联合仿真应用举例 (5)4 结论 (8)致谢 (8)参考文献 (9)AMESim与Matlab_Simulink联合仿真技术机械电子系0802班李敏M200870228摘要:根据AMESim与Matlab/Simulink软件各自的特点,对两者联合仿真技术进行了研究,解决了联合仿真的接口与实现问题,并把该技术应用于电液位置伺服系统的仿真,取得了良好的效果。
关键词:AMESim;Matlab/Simulink;联合仿真;接口Abstract:United Matlab/Simulink technique with AMESim and Matlab/Simulink was discussed based on their own characteristics. The problem of their interface and realization were solved. As an applied example, Matlab/Simulink of electro hydraulic servo-system was shown. Good results were achieved.Keywords:AMESim;Matlab/Simulink;United simulation;Interface0 引言传统的设计方法往往是通过反复的样品试制和试验来分析该系统是否达到设计要求,结果造成大量的人力和物力投入在样品的试制和试验上。
随着计算机仿真技术的发展,在工程系统的软件设计开发中,大量地采用了数值成型的方法,即通过建立系统的数值模型,利用计算机仿真使得大量的产品设计缺陷在物理成型之前就得到了处理,从而可以使企业在最短的时间、以最低的成本将新产品投放到市场。
论文基于AMESim与MatlabSimulink联合仿真技术的接口...
论文:基于A M E S i m与M a t l a b\S i m u l i n k联合仿真技术的接口与应用研究基于AMESim与Matlab\Simulink联合仿真技术的接口与应用研究摘要:根据AMESim与Matlab\Simulink软件各自的特点,对两者联合仿真技术进行了研究,解决了联合仿真的接口与实现问题,并把该技术应用于电液位置伺服系统,取得了良好效果关键词:AMESim,Matlab\Simulink,联合仿真,电液伺服系统1 引言法国lmagine公司开发的AMESim是当今领先的流体,传动系统和液压/机械系统建模,仿真及动力学分析软件.它为用户提供了一个系统工程设计的完整平台,可以建立复杂的多学科领域系统的数学模型,并在此基础上进行仿真计算和深入的分析.然而,不存在一种仿真软件平台能够提供工程设计所需要的所有功能。
AMESim作为多学科领域系统仿真设计的平台提供了丰富的与其他软件的接口。
基于Matlalb平台的Simulink是动态系统仿真领域中著名的仿真集成环境,它在众多领域得到广泛应用。
Simulink 借助Matlalb的计算功能,可方便地建立各种模型、改变仿真参数,很有效地解决仿真技术中的问题。
AMESim作为一个完整的系统工程仿真平台,Simulink作为事实上的控制系统设计的标准平台。
点对点的AMESim-Simulink接口提供了一个使用便捷和行之有效的工具用于AMESim的被控对象模型和控制系统模型之间的耦合分析。
同时利用了AMESim和Simulink的最佳功能,避免了不同平台之间复杂模型的重建。
2 联合仿真设置与实现2.1 联合仿真设置1 将VC++中的"vcvar32.bat"文件从Microsoft Visual C++目录(通常是.\Microsoft Visual Studio\VC98\2 设置环境变量:我的电脑-〉属性-〉高级-〉环境变量。
simulink和modelsim联合仿真的简单例子
使用Link for ModelSim ,你可以建立一个有效的环境来进行联合仿真、器件建模、以及分析和可视化。
进行如下的实例的开发。
1 :可以在MA TLAB或Simulink 中针对HDL实体开发软件测试基准(test bench) 。
2 :可以在Simulink 中对包含在大规模系统模型的HDL 模型进行开发和仿真。
3 :可以生成测试向量进行测试、调试,以及同MA TLAB/Simulink下的规范原形进行HDL 代码的验证。
4 :提供在MA TLAB/Simulink下的对HDL行为级的建模能力。
5 :可以在MA TLAB/Simulink下对HDL的实现进行验证、分析、可视化。
Link for ModelSim中MA TLAB与ModelSim 接口和Simulink与ModelSim 接口是独立的。
这使得你可以单独使用一个接口或同时使用两个。
使用ModelSim和MATLAB的接口使用Link for ModelSim后,你可以使用MA TLAB和它提供的工具箱,比如设计和仿真信号处理,或者其他的数值计算算法。
你还可以用HDL来取代算法和系统设计中的器件模型,并直接完成HDL器件和MA TLAB中剩余算法的联合仿真。
使用ModelSim和Simulink的接口你可以通过Simulink和相关的Blockset创建一个关于信号处理方面或者通信系统方面的系统级设计。
你也可以把HDL 器件合并到设计中或者用HDL模块来取代相应的子系统,并借此来创建软件测试基准来验证你的HDL实现。
ModelSim 中联合仿真模块的参数对话框可以让你很容易的设置输入输出端口,二者连接的属性,时钟,以及TCL命令。
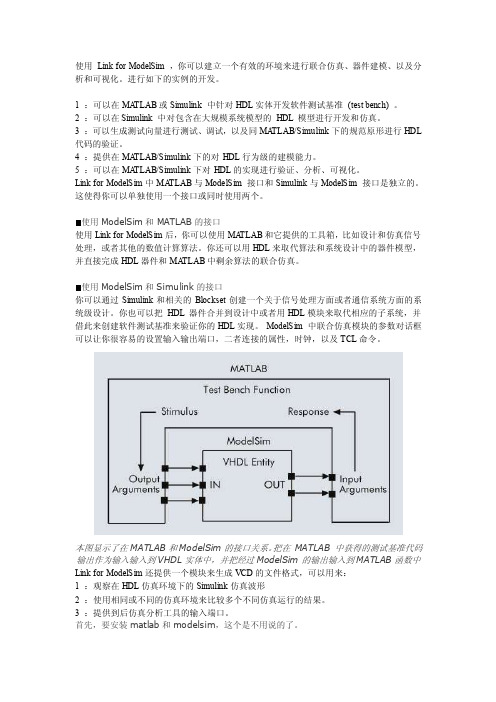
本图显示了在MATLAB和ModelSim的接口关系。
把在MATLAB 中获得的测试基准代码输出作为输入输入到VHDL实体中,并把经过ModelSim的输出输入到MATLAB函数中Link for ModelSim还提供一个模块来生成VCD的文件格式,可以用来:1 :观察在HDL仿真环境下的Simulink仿真波形2 :使用相同或不同的仿真环境来比较多个不同仿真运行的结果。
基于AMESim和Simulink的汽车电动助力转向系统的联合仿真
2008年6月第36卷第6期机床与液压MACH I N E T OOL &HY DRAUL I CSJun 12008Vol 136No 16收稿日期:2007-09-03基金项目:四川省重点学科重点实验室建设项目(Z01336)作者简介:王康康(1981—),男,浙江浦江人,在读研究生,主要研究方向:汽车电子控制技术。
电话:013550397278,E -mail:p jcucu mber@1631com 。
基于A MESim 和Simulink 的汽车电动助力转向系统的联合仿真王康康,唐岚,黎长青(西华大学交通与汽车工程学院,成都610039)摘要:以研究电动助力转向系统的助力控制模式的跟踪性能和轻便性为目的,在AMESi m 和Si m ulink 平台上创建了电动助力转向系统联合仿真模型。
仿真结果表明,所设计的P I D 控制算法使电动助力转向系统具有良好的跟踪性能和轻便性。
仿真结果为电动助力转向控制系统的设计提供了依据。
关键词:汽车电动助力转向;AMESi m ;联合仿真中图分类号:U46116 文献标识码:A 文章编号:1001-3881(2008)6-127-2Co 2si m ul a ti on Study of Autom ob ile Electron i c PowerSteer i n g System Ba sed on AM ES i m and S i m uli n kWANG Kangkang,T ANG Lan,L I Changqing(School of Trans portati on and Aut omobile Engineering,Xihua University,Chengdu 610039,China )Abstract:The trace capability and portability of the power 2assisted mode of the electric power steering syste m was studied,a co 2si m ulati on model of the electric power steering syste m was created on the p latfor m of AMESi m and Si m ulink .The results of the si m ula 2ti on confir m that the P I D contr ol algorith m f or the electric power steering syste m has a good trace capability and portability .The con 2clusi on of si m ulati on is useful f or the design of electric power steering syste m.Keywords:EPS;AMESi m ;Co 2si m ulati on1 电动助力转向系统的结构电动助力转向系统(EPS )是机械转向装置配合电子控制单元共同完成转向的动力转向系统。
AMESim与Simulink联合仿真设置步骤与仿真实例
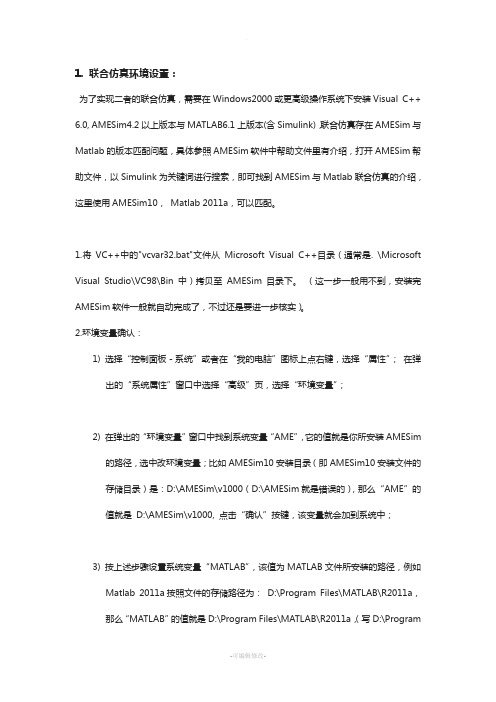
1. 联合仿真环境设置:为了实现二者的联合仿真,需要在Windows2000或更高级操作系统下安装Visual C++ 6.0, AMESim4.2以上版本与MATLAB6.1上版本(含Simulink),联合仿真存在AMESim与Matlab的版本匹配问题,具体参照AMESim软件中帮助文件里有介绍,打开AMESim帮助文件,以Simulink为关键词进行搜索,即可找到AMESim与Matlab联合仿真的介绍,这里使用AMESim10,Matlab 2011a,可以匹配。
1.将VC++中的"vcvar32.bat"文件从Microsoft Visual C++目录(通常是. \Microsoft Visual Studio\VC98\Bin中)拷贝至AMESim目录下。
(这一步一般用不到,安装完AMESim软件一般就自动完成了,不过还是要进一步核实)。
2.环境变量确认:1) 选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”;2) 在弹出的“环境变量”窗口中找到系统变量“AME”,它的值就是你所安装AMESim的路径,选中改环境变量;比如AMESim10安装目录(即AMESim10安装文件的存储目录)是:D:\AMESim\v1000(D:\AMESim就是错误的),那么“AME”的值就是D:\AMESim\v1000, 点击“确认”按键,该变量就会加到系统中;3) 按上述步骤设置系统变量“MATLAB”,该值为MATLAB文件所安装的路径,例如Matlab 2011a按照文件的存储路径为:D:\Program Files\MATLAB\R2011a,那么“MATLAB”的值就是D:\Program Files\MATLAB\R2011a,(写D:\ProgramFiles\MATLAB,D:\Program Files 等都是错误的), 点击“确认”按键,该变量就会加到系统中;4) 同样的方式定义系统变量LM_LICENSE_FILE,值为D:\AMESim\v1000\licensing\license.dat,值就是AMESim软件许可文件的存储路径。
AMESim-MATLAB联合仿真详细设置+部分问题解决步骤
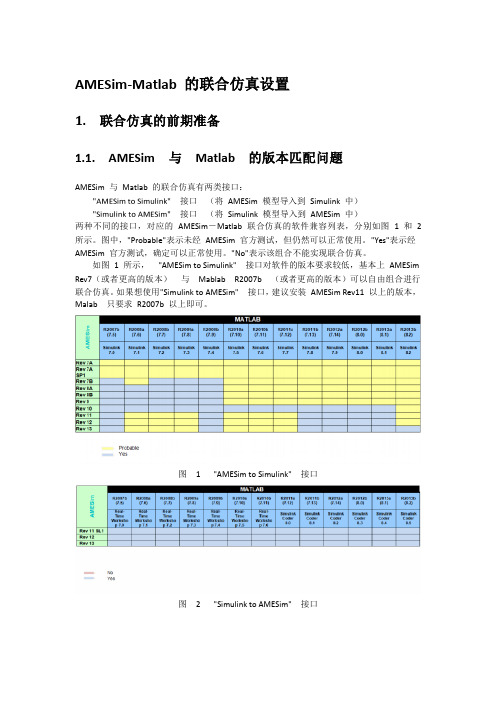
AMESim-Matlab 的联合仿真设置1. 联合仿真的前期准备1.1. AMESim 与Matlab 的版本匹配问题AMESim 与Matlab 的联合仿真有两类接口:接口(将AMESim 模型导入到Simulink 中)接口(将Simulink 模型导入到AMESim 中)两种不同的接口,对应的AMESim-Matlab 联合仿真的软件兼容列表,分别如图 1 和 2 所示。
图中,"Probable"表示未经AMESim 官方测试,但仍然可以正常使用。
"Yes"表示经AMESim 官方测试,确定可以正常使用。
"No"表示该组合不能实现联合仿真。
如图 1 所示,"AMESim to Simulink" 接口对软件的版本要求较低,基本上AMESim Rev7(或者更高的版本)与Mablab R2007b (或者更高的版本)可以自由组合进行联合仿真。
如果想使用"Simulink to AMESim" 接口,建议安装AMESim Rev11 以上的版本,Malab 只要求R2007b 以上即可。
图 1 "AMESim to Simulink" 接口图 2 "Simulink to AMESim" 接口1.2. Microsoft Visual C++编译器(VC++)的版本选择?AMESim 支持的VC++版本分别如图1(32 位编译器),图2(64 位编译器)所示。
图 1 和图 2 中,"Probable","Yes","No"表示的意思同上。
经测试,AMESim Rev9 可以正常调用VS2010 版的VC++(32 位)。
另外,从图 1 中,可以看到,VC++ 6.0 不能支持AMESim Rev11 以上的版本。
基于amesim和simulink的飞机液压刹车系统的联合仿真

ulation based on AMESim and Simulink is carried out. PID control is added to the original system and is compared with the original system. The simulation results show that the system with PID control has faster response time,shorter time to reach steady state, smaller overshoot and better system performance.
Vol. 39 No. 11 104
舰船电子工程 Ship Electronic Engineering
总第 305 期 2019总年第第31015 期
基 于 AMESim 和 Simulink 的 飞 机 液 压 刹 车 系 统 的 联合仿真∗
张鑫
(商洛学院电子信息与电气工程学院 商洛 726000)
关键词 飞机液压刹车系统;AMESim;Simulink;联合仿真 中图分类号 V226 DOI:10. 3969/j. issn. 1672-9730. 2019. 11. 026
Co-simulation Study of Aircraft Hydraulic Braking System Based on AMESim and Simulink
ZHANG Xin (College of Electronic Information and Electrical Engineering,Shangluo University,Shangluo 726000)
simulink与AMESim联合仿真
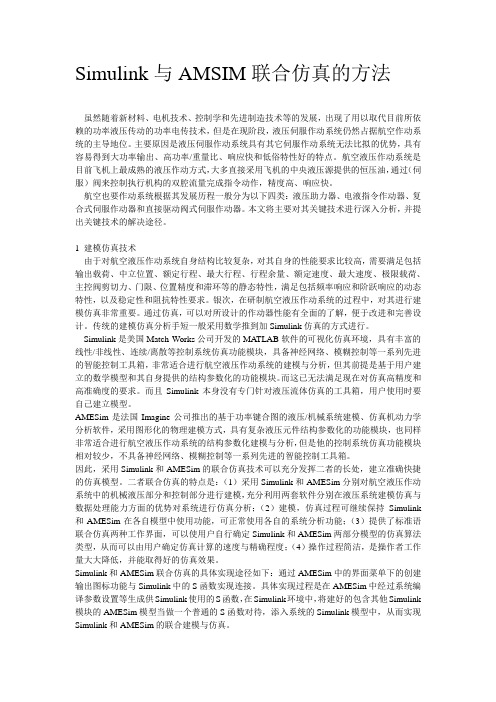
Simulink与AMSIM联合仿真的方法虽然随着新材料、电机技术、控制学和先进制造技术等的发展,出现了用以取代目前所依赖的功率液压传动的功率电传技术,但是在现阶段,液压伺服作动系统仍然占据航空作动系统的主导地位。
主要原因是液压伺服作动系统具有其它伺服作动系统无法比拟的优势,具有容易得到大功率输出、高功率/重量比、响应快和低俗特性好的特点。
航空液压作动系统是目前飞机上最成熟的液压作动方式,大多直接采用飞机的中央液压源提供的恒压油,通过(伺服)阀来控制执行机构的双腔流量完成指令动作,精度高、响应快。
航空也要作动系统根据其发展历程一般分为以下四类:液压助力器、电液指令作动器、复合式伺服作动器和直接驱动阀式伺服作动器。
本文将主要对其关键技术进行深入分析,并提出关键技术的解决途径。
1 建模仿真技术由于对航空液压作动系统自身结构比较复杂,对其自身的性能要求比较高,需要满足包括输出载荷、中立位置、额定行程、最大行程、行程余量、额定速度、最大速度、极限载荷、主控阀剪切力、门限、位置精度和滞环等的静态特性,满足包括频率响应和阶跃响应的动态特性,以及稳定性和阻抗特性要求。
银次,在研制航空液压作动系统的过程中,对其进行建模仿真非常重要。
通过仿真,可以对所设计的作动器性能有全面的了解,便于改进和完善设计。
传统的建模仿真分析手短一般采用数学推到加Simulink仿真的方式进行。
Simulink是美国Match Works公司开发的MA TLAB软件的可视化仿真环境,具有丰富的线性/非线性、连续/离散等控制系统仿真功能模块,具备神经网络、模糊控制等一系列先进的智能控制工具箱,非常适合进行航空液压作动系统的建模与分析,但其前提是基于用户建立的数学模型和其自身提供的结构参数化的功能模块。
而这已无法满足现在对仿真高精度和高准确度的要求。
而且Simulink本身没有专门针对液压流体仿真的工具箱,用户使用时要自己建立模型。
AMESim是法国Imagine公司推出的基于功率键合图的液压/机械系统建模、仿真机动力学分析软件,采用图形化的物理建模方式,具有复杂液压元件结构参数化的功能模块,也同样非常适合进行航空液压作动系统的结构参数化建模与分析,但是他的控制系统仿真功能模块相对较少,不具备神经网络、模糊控制等一系列先进的智能控制工具箱。
基于AMESim与Simulink/Stateflow的汽车ABS联合建模与仿真研究
基于AMESim与Simulink/Stateflow的汽车ABS联合建模与仿真研究汽车ABS系统是现代汽车安全性能的重要组成部分,它能够在紧急刹车时避免车轮打滑和打滑过度,保证驾驶员和乘客的人身安全。
为了更好地研究汽车ABS系统,需要进行建模与仿真研究。
本文将介绍一种基于AMESim与Simulink/Stateflow联合建模的汽车ABS系统研究方法。
首先,我们需要了解AMESim和Simulink/Stateflow的基本概念。
AMESim是一种以物理原理为基础的多领域仿真软件,可用于建立液压、气动、热流等系统的数学模型,并通过仿真来对其性能进行分析。
Simulink是一种用于建立和仿真动态系统的可视化建模工具,Stateflow则是用于建立和仿真离散事件动态系统的建模工具,它们可以相互集成,进行联合建模和仿真。
接下来,本文将介绍联合建模和仿真ABS系统的过程。
首先,需要建立车辆动力学模型,包括车轮、刹车系统和悬挂系统。
然后,需要将车轮动力学模型与刹车系统模型相结合,建立汽车ABS系统模型。
在此基础上,还需要建立控制器模型,用于确保系统能够在各种情况下正常运行。
对于车轮模型,可借助AMESim进行建模。
首先将轮胎和车轮组合在一起,导入力学特性和减震特性,建立轮胎和车轮的物理特征模型。
然后,将车轮与刹车系统相结合,建立刹车系统的物理模型。
在刹车系统中,我们需要考虑刹车片接触和离开刹车盘时的特性,以及刹车盘的温度变化等因素。
对于控制器模型,可以利用Simulink/Stateflow进行建模。
首先,需要将在汽车ABS系统中充当传感器的各种设备模型输入到模型中。
然后,需要建立控制系统模型,包括基于压力、时间和速度等因素的控制器模型和驾驶员刹车工况判断模型。
最后,需要将控制系统模型与车轮模型和刹车系统模型相结合,建立完整的汽车ABS系统模型。
完成ABS联合建模后,我们可以通过仿真来测试汽车ABS系统的性能。
AMESim与MATLAB_Simulink联合仿真技术及在发动机主动隔振中的应
振 动 与 冲 击第26卷第8期J OURNAL OF V IBRAT I ON AND SHOCKVo.l 26No .82007A MESi m 与MATLAB \Si m uli nk 联合仿真技术及在发动机主动隔振中的应用收稿日期:2006-10-08 修改稿收到日期:2006-11-17第一作者肖 勇男,硕士,1981年10月生肖 勇, 靳晓雄, 蔺玉辉(同济大学汽车学院,上海 201804)摘 要 介绍了AM ESi m 软件与MAT LAB \S i m u link 的接口技术,并使用AM ESi m 与M ATLAB \S i m u li nk 对发动机主动隔振进行了联合仿真,分析了主动以及被动隔振的隔振效果,为主动控制提供了新的设计思路。
关键词:AM ES i m ,M ATLA B \S i m u li nk ,联合仿真,主动隔振,LQR中图分类号:T P273 文献标识码:A1 A M ESi m 软件介绍以及与M ATLAB \Si m uli n k 的接口技术AM ES i m (Advanced M odeli n g Env ironm ent for Si m u lation o fEng ineeri n g Syste m s )是1995年由法国I M AG I NE 公司开发的一个图形化的开发环境,用于工程系统的建模、仿真和动态性能分析。
AMES i m 仿真模型的建立扩充或改变都是通过图形界面(GU I)来进行的,使用者不用编制任何程序代码。
该软件采用了鲁棒性极强的智能求解器,自动选择最佳的积分算法,从而缩短了仿真时间、提高了仿真精度。
此外,AMES i m 与多种软件的具有接口。
AMESi m 提供了与Excel 、M atlab 、MAT LAB \Si m u link 和ADAM S 等软件的接口,可方便地与这些软件进行联合仿真。
为了实现联合仿真需要在W i n do w s2000或更高级的操作系统下安装V isual C ++6.0、AMESi m 4.0和MATLAB6.1(或者三种软件的更高版本),并进行以下设置:1)设置环境变量。
AMEsim和Simulink联合仿真教程
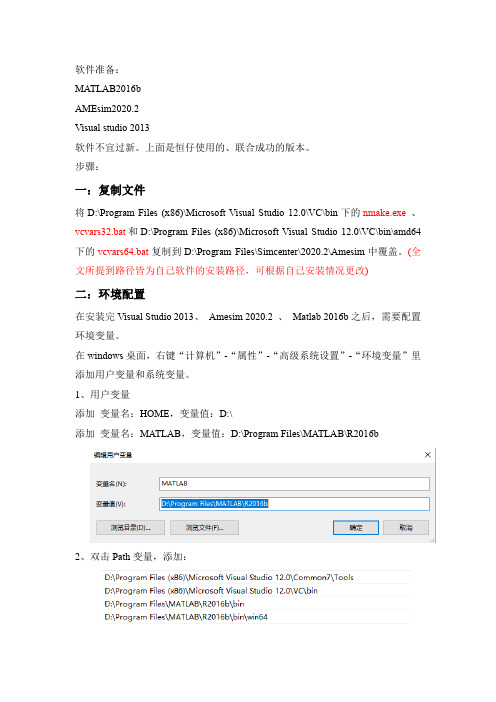
软件准备:MATLAB2016bAMEsim2020.2Visual studio 2013软件不宜过新。
上面是恒仔使用的、联合成功的版本。
步骤:一:复制文件将D:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\bin下的nmake.exe 、vcvars32.bat和D:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\bin\amd64下的vcvars64.bat复制到D:\Program Files\Simcenter\2020.2\Amesim中覆盖。
(全文所提到路径皆为自己软件的安装路径,可根据自己安装情况更改)二:环境配置在安装完Visual Studio 2013、Amesim 2020.2 、Matlab 2016b之后,需要配置环境变量。
在windows桌面,右键“计算机”-“属性”-“高级系统设置”-“环境变量”里添加用户变量和系统变量。
1、用户变量添加变量名:HOME,变量值:D:\添加变量名:MATLAB,变量值:D:\Program Files\MATLAB\R2016b2、双击Path变量,添加:配置完成后,重启电脑,以使用户变量和系统变量生效。
三、软件设置:1、首先打开Matlab 2016b,在命令窗口输入:mex -setup将C和C++编译器都设置为Visual C++ 2013.2、打开Amesim2020.2 ,进入Tools-Preferences-Compilation,将Active Compiler设置为Microsoft Visual C++ (64bit)。
软件配置完成。
四、联合仿真例程运行在Amesim 2020.2-Help-Help里,输入simulink,打开“Hybrid_bus_steps_simulink”例程:点击Open this demo,下面一串链接,将其复制到指定目录并打开:点击Amesim 2020.2-Tools-MATLAB®,它会自动打开MATLAB2017b,并自动添加AMESIM的相关路径到MATLAB PATH里,然后它会自动打开Hybrid_bus_steps_simulink.mdl。
ADAMS+AMESIM+SIMULINK操作说明
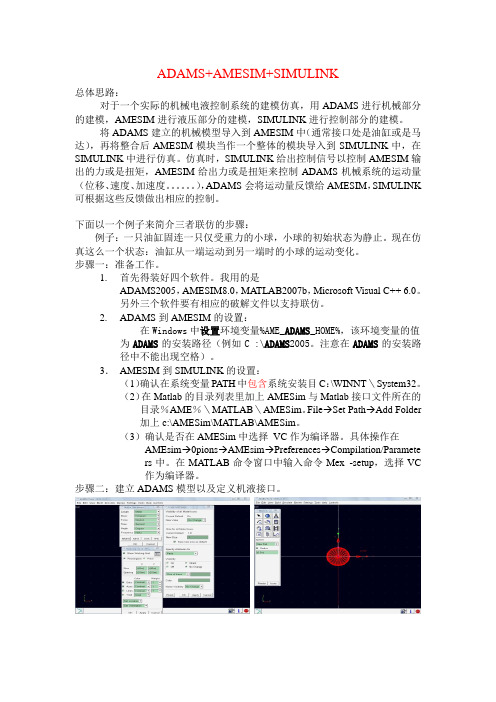
ADAMS+AMESIM+SIMULINK总体思路:对于一个实际的机械电液控制系统的建模仿真,用ADAMS进行机械部分的建模,AMESIM进行液压部分的建模,SIMULINK进行控制部分的建模。
将ADAMS建立的机械模型导入到AMESIM中(通常接口处是油缸或是马达),再将整合后AMESIM模块当作一个整体的模块导入到SIMULINK中,在SIMULINK中进行仿真。
仿真时,SIMULINK给出控制信号以控制AMESIM输出的力或是扭矩,AMESIM给出力或是扭矩来控制ADAMS机械系统的运动量(位移、速度、加速度。
),ADAMS会将运动量反馈给AMESIM,SIMULINK 可根据这些反馈做出相应的控制。
下面以一个例子来简介三者联仿的步骤:例子:一只油缸固连一只仅受重力的小球,小球的初始状态为静止。
现在仿真这么一个状态:油缸从一端运动到另一端时的小球的运动变化。
步骤一:准备工作。
1.首先得装好四个软件。
我用的是ADAMS2005,AMESIM8.0,MATLAB2007b,Microsoft Visual C++ 6.0。
另外三个软件要有相应的破解文件以支持联仿。
2.ADAMS到AMESIM的设置:在Windows中设置环境变量%AME_ADAMS_HOME%,该环境变量的值为ADAMS的安装路径(例如C :\ADAMS2005。
注意在ADAMS的安装路径中不能出现空格)。
3.AMESIM到SIMULINK的设置:(1)确认在系统变量PATH中包含系统安装目C:\WINNT\System32。
(2)在Matlab的目录列表里加上AMESim与Matlab接口文件所在的目录%AME%\MATLAB\AMESim。
File→Set Path→Add Folder加上c:\AMESim\MATLAB\AMESim。
(3)确认是否在AMESim中选择VC作为编译器。
具体操作在AMEsim→0pions→AMEsim→Preferences→Compilation/Parameters中。
AMESim与MATLAB_Simulink联合仿真接口配置

AMESim—MATLAB(64位)联合仿真设置详细步骤说明:现以AMESimR12、MATLAB2014b为例说明,其他版本类似。
1、版本要求2、辅助软件VS2013若要使用 AMESim 与 Simulink 的接口,则需要在本机安装编译器,高版本软件需要高版本的编译器,这里以VS2013为例设置。
一般推荐先安装VS编译器,然后安装 Matlab,最后安装 AMESim的顺序。
若后安装VS编译器,将VS编译器安装目录下如 D:\ Microsoft Visual Studio 12.0 \VC\bin 目录中的nmake.exe 文件和vcvars32.bat 以及D:\Microsoft Visual Studio 12.0\VC\bin\amd64下的vcvars64.bat(64位版本的MATLAB)文件拷贝至 AMESim 安装目录,如D:\AMESim\v1200下。
3、环境变量设置定义Windows 系统环境变量:1)选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;2)在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”;3)用户变量中添加HOME D:\MATLAB D:\MATLAB\R2014bPath D:\ Microsoft Visual Studio 12.0\Common7\Tools; D:\ Microsoft Visual Studio 12.0\VC\bin; D:\Program Files\MATLAB\R2014b\bin; D:\ProgramFiles\MATLAB\R2014b\bin\win644) 在系统变量中添加在Path 环境变量中加入(以分号与其它已经存在的变量值隔开)路径:Matlab_Root(如 D:\Matlab\R2010a)\bin 和Matlab_Root(如D:\Matlab\R2010a)\bin\win32 ,以及%windir%\System32,其中%windir%指的是 Windows 的安装路径,如 C:\WINNTPath D:\Program Files (x86)\Microsoft Visual Studio 10.0; D:\AMESim\v1000; D:\AMESim\v1000\win64;D:\AMESim\v1000\sys\mingw32\bin;D:\AMESim\v1000\s ys\mpich\mpd\bin;D:\AMESim\v1000\sys\cgns;%SystemRoot%\system32;%SystemR oot%;%SystemRoot%\System32\Wbem;D: \MATLAB\R2014b\bin\win64;C:\WINDOWS\system32;C:\WINNT (该处很重要一定要添加,而且一定要包含C:\WINDOWS\system32,不然会有引起很多错误)4、AMESim与MATLAB设置启动AMESim并确认 AMESim 使用的是 MS C++编译器。
AMESim与MATLAB Simulink联合仿真技术及应用

第26卷 第5期 情报指挥控制系统与仿真技术 Vol.26 No.5 2004年10月Information Command Control System & Simulation Technology Oct.2004文章编号邓卫华北京 100081分析了AMESim 与MATLAB/Simulink 的特点解决了联合仿真的接口问题取得了良好效果AMESim联合仿真TP391.9 文献标识码China)Abstract: United simulation technique with AMESim and MATLAB/Simulink is discussed in the paper. As anapplied example, simulation of active suspension system is shown.Key words: AMESimunited simulation高级工程系统仿真建模环境迄今已发展到4.0版本液体及气体控制它具有丰富的模型库1000多个模块用户可以采用基本元素法按照实际物理系统来构建自定义模块或仿真模型其次它采用复合接口简化了模型的规模采用变步长变类型而且具有稳态仿真批处理仿真得到精度和稳定性很高的仿真结果2004-01-01作者简介1979-女研究方向为车辆仿真技术男研究方向为车辆悬架系统设计与计算机辅助设计而且整个仿真模型可以生成C 或Fortran 代码由于具有齐全的线性分析模型简化工具修改内置有与CMATLAB/Simulink 的接口用户可以在AMESim 环境中访问任何C 或Fortran 程序优化工具及能谱分析等工具而整个仿真过程仅仅采用鼠标基于这些优点Ford ZFSimulink 借助于MATLAB 强大的数值计算能力在各个工程领域发挥着巨大的作用但MATLAB 存在不能有效地处理代数环问题等缺点利用AMESim 对Simulink 的接口技术就能既发挥AMESim 突出的流体机械的仿真效能取长补短这种联合仿真的技术对多领域系统的仿真效果更是无与伦比62 李谨AMESim 与MA TLAB/Simulink 联合仿真技术及应用 第26卷1 AMESim与MATLAB/Simulink联合仿真技术 作为一个图形化的开发环境在模型中描述所有系统和零部件的功能对于一个复杂的工程系统AMESim则突破性地实现了多个领域仿真而专注于物理系统本身的设计我们又必须对所研究的系统的某个子系统进行深入研究这时在AMESim中建模就不如在MATLAB/Simulink 中方便而在AMESim 中对其余系统建模这样一方面可以减小建模的工作量为了实现二者的联合仿真AMESim4.0与MATLAB6.1上版本1设置方法为在环境变量设置对话框中设置变量名例如则变量值为设置MATLAB 环境变量MATLAB例如则变量值为确认在系统变量中包括Windows 安装路径添加上可能会出现各种错误则可以运行AMESim 和MATLAB/Simulink 进行联合仿真讲述联合仿真技术的实现步骤建立物理模型如图1把系统分为机械系统和控制系统两部分控制系统模型由Simulink建立1绘图模式先根据物理模型然后为Simulink 的控制模型构造一个图标在Sketch mode 中界面选择Create export icon ,在绘图区出现的创建输出图标对话框中选择输入定义图标名称标准界面(Simulink)SimulCosim将模型与界面图标相对应的部分连接起来如图2中所示在AMESimSubmodel Mode中为系统的各个模块选择合适的子模型及合适的数学模型active suspension. ame考虑到本文介绍的是AMESim 与Simulink 联合仿真技术3参数模式输入系统的各个模块的参数第5期 情报指挥控制系统与仿真技术 63图2 AMESim构建的主动悬架模型 4运行模式开始运行运行结束5因为主动悬架控制目标就是使车辆获得高平顺性和操纵稳定性同时限制悬架的动挠度从便于控制的角度来说在这里采用汤姆逊控制律主动律最佳极点配置方法来设计主动悬架控制器的设计6S-Functionactive suspension_注意S 函数名中不能缺少符号 1 0.01其中第一个参数表示是否生成AMESim 结果文件0表示不生成7Demux在AMESim 中提供了两种与Simulink 接口的接口界面标准界面两种接口界面的区别在于AMESim 和Simulink 中共同采用Simulink 中选定的求解器二者则各自采用各自的求解器AMESim 模型在Simulink 中被看作是时间连续模块这使得其与在Simulink 中建立的AMESim 模型的控制器十分匹配这里采用的是标准界面在联合仿真界面时输入仿真参数注意仿真时AMESim 模型不能关闭生成的S 函数将会自动压缩为一个文件下面是使用这种方法对某车悬架垂直振动仿真结果图3 Simulink建造的控制系统模型万方数据64 李谨AMESim与MA TLAB/Simulink联合仿真技术及应用第26卷图4 车身垂直位移与时间关系图 图5 车身垂直速度与时间关系图 图6 车身垂直减速度与时间关系图 图7 轮胎垂直位移与时间关系图 图8 轮胎垂直速度与时间关系图 图9 轮胎垂直加速度与时间关系图 3 总结 从上面可以看出AMESim与MATLAB/Simulink联合仿真技术开创了一条效果很好而又不很复杂的仿真新途径相互取长补短由此可以断言必将在工程领域内得到广泛应用[1] 周云山北京理工大学出版社, 1999. [2] 夏德钤. 反馈控制理论[M]. 哈尔滨马彪兵器工业出版社。
AMESim-Simulink联合仿真安装步骤2014-7
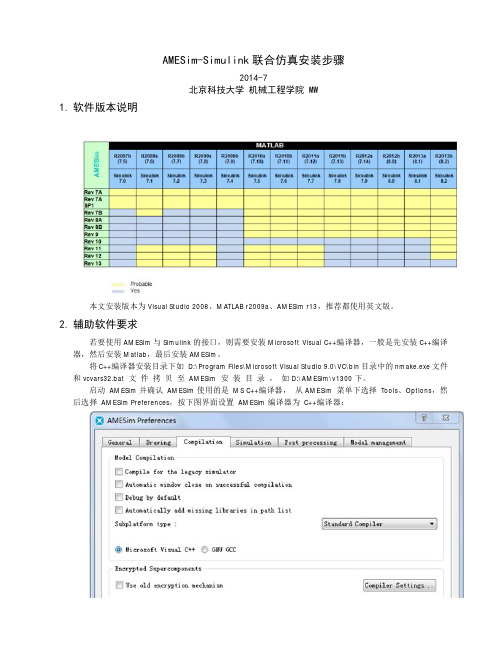
AMESim-Simulink联合仿真安装步骤2014-7北京科技大学机械工程学院 MW1.软件版本说明本文安装版本为Visual Studio 2008、MATLAB r2009a、AMESim r13,推荐都使用英文版。
2.辅助软件要求若要使用AMESim与Simulink的接口,则需要安装Microsoft Visual C++编译器,一般是先安装C++编译器,然后安装Matlab,最后安装AMESim。
将C++编译器安装目录下如D:\Program Files\Microsoft Visual Studio 9.0\VC\bin目录中的nmake.exe文件和vcvars32.bat 文件拷贝至AMESim 安装目录,如D:\AMESim\v1300下。
启动AMESim并确认AMESim使用的是MS C++编译器,从AMESim 菜单下选择Tools、Options,然后选择AMESim Preferences,按下图界面设置AMESim编译器为C++编译器:在第一次使用AMESim和Simulink接口时,请在Matlab命令行窗口输入以下命令以确认其所使用的编译器:Mex -setup(注意mex和-之间有空格!)然后在提示中输入Y,2,Y选择对应的C++编译器编号并确认。
在Matlab界面,加入如下两个路径(%AME%指AMESim的安装路径,如D:\AMESim\v1300):%AME%\scripting\matlab\amesim%AME%\interfaces\sl2ame3.环境变量环境变量分为用户变量(U)和系统变量(S),注意区分!变量值要根据软件安装的盘符路径自己调整。
例如,我把MATLAB安装在D:\MATLAB\R2009a,把AMESim安装在D:\AMESim\v1300在用户变量中添加HOME=D:\MATLAB =D:\MATLAB\R2009a在系统变量中添加AME=D:\AMESim\v1300(这个一般都有的,不需要自己添加)MATLAB =D:\MATLAB\R2009aPath=D:\Program Files\Microsoft Visual Studio 9.0;D:\AMESim\v1300;D:\AMESim\v1300\win32;D:\AMESim\v1300\sys\mingw32\bin;D:\AMESim\v1300\sys\mpich\ mpd\bin;D:\AMESim\v1300\sys\cgns;%SystemRoot%\system32;%SystemRoot%;%SystemRoot%\System32\Wbem;D:\ MATLAB\R2009a\bin\win32;C:\WINDOWS\system32;C:\WINNT4.联合仿真设置成功的标志是可以运行Help→AMESim demo help→Platform→MIL/SIL/HIL and Real-Time下的范例5.注意事项(1)VS推荐使用2008版,本人试过2010版,但失败了,注意要使用英文版。
NI Veristand-AMESim(3D)-Simulink实时仿真流程概览
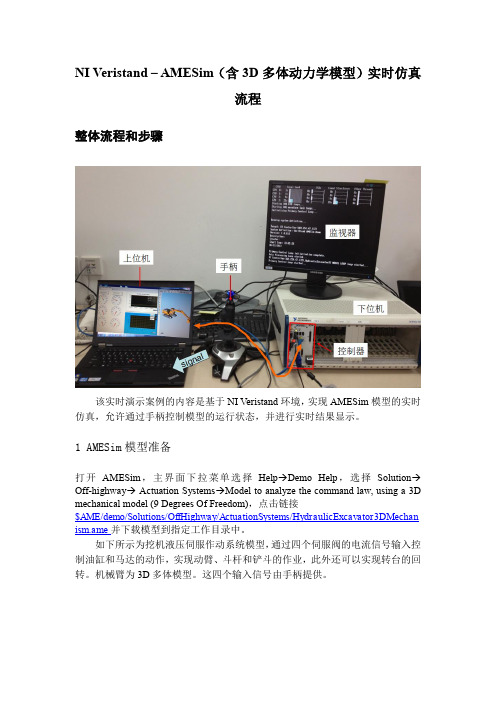
NI Veristand – AMESim(含3D多体动力学模型)实时仿真流程整体流程和步骤该实时演示案例的内容是基于NI Veristand环境,实现AMESim模型的实时仿真,允许通过手柄控制模型的运行状态,并进行实时结果显示。
1 AMESim模型准备打开AMESim,主界面下拉菜单选择Help→Demo Help,选择Solution→Off-highway→ Actuation Systems→Model to analyze the command law, using a 3D mechanical model (9 Degrees Of Freedom),点击链接$AME/demo/Solutions/OffHighway/ActuationSystems/HydraulicExcavator3DMechan ism.ame并下载模型到指定工作目录中。
如下所示为挖机液压伺服作动系统模型,通过四个伺服阀的电流信号输入控制油缸和马达的动作,实现动臂、斗杆和铲斗的作业,此外还可以实现转台的回转。
机械臂为3D多体模型。
这四个输入信号由手柄提供。
首先对模型进行简化处理,保证模型能够进行定步长计算,计算步长最好控制在0.1~1ms之间,简化过程此处不再赘述。
经过简化,模型能够使用Euler算法以0.1ms步长运行,计算结果与变步长结果一致。
添加Veristand接口,定义四个输入,将输入和对应伺服阀的信号输入端口连接。
编译进入parameter模式(注:自定义的global parameter可被Veristand识别,并允许在实时运行时修改,藉此实现在线调参。
本例中不考虑)。
进入simulation模式,在watch variables对话框中拖入所需要进行实时显示的结果(variable),并进行命名(修改title)。
这些变量将会出现在Veristand的映射列表中。
设定打印间隔(print interval)选择定步长模式、算法和计算步长。
MATLAB,Simulink与Modelsim联合仿真步骤及实例
目录1:什么是link for modelsim2:link for modelsim的安装与设置3:使用link for modelsim仿真的实例什么是link for modelsimLink for modelsim是一个联合仿真的接口,它将MathWorks工具整合到EDA工作环境中,使其应用于FPGA和ASIC的开发。
这个接口在HDL仿真器ModelSim SE/PE于MathWorks的产品Matlab和SimuLink间提供了一个双向连接,以指导硬件的设计验证和联合仿真。
这种整合可以分别充分发挥Matlab/SimuLink和ModelSim各自的优势。
1.联合仿真环境Link for ModelSim是一个客户/服务器的车是平台和联合仿真应用,ModelSim在这个仿真环境中所起的作用取决于ModelSim与Matlab还是SimuLink连接,本说明只讲ModelSim与Matlab的连接。
a.ModelSim与Matlab连接当与Matlab相连接时,ModelSim作为客户端,如下图所示:在这个模式中,Matlab服务器等到ModelSim客户端发出的服务请求,当接收到一个请求时,Matlab建立一个通信连接,而且调用一个指定的Matlab函数,这个函数封装了用于计算数据以验证或者使当前在ModelSim中仿真的HDL模型的可视化。
下图显示了在一个测试平台环境中Matlab函数如何与ModelSim进行通信Matlab服务器可以用于多个HDL实体之间的联合仿真,但是你必须为多个HDL实体指定一个通信方式使他们可以相互通信,下图显示了两个ModelSim客户端如何连接到服务器的TCP/IP的4449端口:回到目录2.通信模式在ModelSim和Matlab之间的通信模式有共享内存和网络两种,当你的ModelSim和MatLab运行与同一个系统的时候,可以指定为共享内存方式和网络方式,但共享内存方式更加合适,其也是默认的方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 联合仿真环境设置:
为了实现二者的联合仿真,需要在Windows2000或更高级操作系统下安装V isual C++ 6.0, AMESim4.2以上版本与MA TLAB6.1上版本(含Simulink),联合仿真存在AMESim与Matlab 的版本匹配问题,具体参照AMESim软件中帮助文件里有介绍,打开AMESim帮助文件,以Simulink为关键词进行搜索,即可找到AMESim与Matlab联合仿真的介绍,这里使用AMESim10,Matlab 2011a,可以匹配。
1.将VC++中的"vcvar3
2.bat"文件从Microsoft Visual C++目录(通常是. \Microsoft V isual Studio\VC98\Bin中)拷贝至AMESim目录下。
(这一步一般用不到,安装完AMESim软件一般就自动完成了,不过还是要进一步核实)。
2.环境变量确认:
1) 选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;在弹
出的“系统属性”窗口中选择“高级”页,选择“环境变量”;
2) 在弹出的“环境变量”窗口中找到系统变量“AME”,它的值就是你所安装AMESim
的路径,选中改环境变量;比如AMESim10安装目录(即AMESim10安装文件的
存储目录)是:D:\AMESim\v1000(D:\AMESim就是错误的),那么“AME”的值
就是D:\AMESim\v1000, 点击“确认”按键,该变量就会加到系统中;
3) 按上述步骤设置系统变量“MA TLAB”,该值为MA TLAB文件所安装的路径,例如
Matlab 2011a按照文件的存储路径为:D:\Program Files\MA TLAB\R2011a,那么
“MA TLAB”的值就是D:\Program Files\MA TLAB\R2011a,(写D:\Program Files\MA TLAB,D:\Program Files 等都是错误的), 点击“确认”按键,该变量就会加到系统中;
4) 同样的方式定义系统变量LM_LICENSE_FILE,值为
D:\AMESim\v1000\licensing\license.dat,值就是AMESim软件许可文件的存储路径。
即LM_LICENSE_FILE=C:\AMESim4.2.0\licensing\license.dat。
3. 确认是否在AMESim中选择VC作为编译器。
具体操作在AMESim->Opions-> AMESim
Preferences->Compilation/Parameters中;对AMESim 10而言,具体操作在AMESim-〉Tools->Opions-> AMESim Preferences->Compilation/Parameters中,进去后选择Microsoft Visual C++项,然后点击OK确认。
4. 在MA TLAB命令窗口中输入Mex –setup (Mex与-之间有空格),按照提示选择VC++作为编译器。
5. 在Matlab 的目录列表里加上AMESim与Matlab 接口文件所在的目录,Matlab->File->Set Path,在打开的对话框中点击“Add Folder”选择设置接口文件目录%AME%\matlab\amesim,其中%AME%是AMESim的安装目录(AMESim文件的存储目录,别搞错了), 如果安装文件存在C:\AMEsim , 则就加上C:\AMEsim\matlab\amesim。
在AMESim10中为保险起见,多设无害嘛,设置三个目录(这里假设AMESim软件安装目录D:\AMESim\v1000):
1) D:\AMESim\v1000\interfaces\simulink
2) D:\AMESim\v1000\interfaces\sl2ame
3) D:\AMESim\v1000\scripting\matlab\amesim
经过以上步骤一般就设置好了。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
设置好后,以AMESim模型添加到Simulink里,在Simulink中运行为例说明联合仿真步骤,具体可以参考AMESim软件自带的帮助文件,打开帮助文件后以Simulink为关键词进行搜索即可找到。
这里简要总结:
1.在AMESim中建立模型
图1 AMESim模型图2 创建接口
)
2.按照图2所示,在AMESim中创建接口(creating the interface icon)
3.接口对话框设置按照图3执行,注意该接口是AMESim模型在Simulink中运行的接口,
该例子中两个输入量Bspeed和Wspeed分别表示从AMESim模型输入到接口(输给Simulink控制逻辑)中,Force是输出量,表示从接口(来自Simulink控制逻辑的计算)输出到AMESim模型。
设置完点击OK后产生图4所示的接口图标。
图3 接口对话框设置
图4 接口图标
4.接口连接后的AMESim模型如图5所示。
依次点击子模型模式(submodel mode)和参数模
型模式(parameter mode),如果设置无误将出现图6所示的对话框,生成S-Function。
图5 接口连接后的AMESim模型
5.打开Simulink,新建模型,simulink library browser->new->model,新建S函数,simulink
library browser-> simulink-> User-Defined Functions-> S-Function 定义S函数,如图7所示,双击打开定义参数,如图8所示,注意函数名需要与AMESim模型一致,且要加上下划线“_”;S-function parameters 里的1和0.01含义:The first parameter indicates whether an AMESim results file is to be created. A value of 1indicates it is to be created and any other number indicates it is not to be created。
The second parameter indicates the special print interval. If a zero or negative value is entered, Simulink will
add to the AMESim results file whenever it adds to its own results.
图7 S-Function图标
图8 S-Function 参数设置
6.按照图9连接后并运行仿真。
注意,仿真运行前S-Fuction模块和运行仿真后有区别,
仿真运行前是Active Suspension,运行后变成了AMESim Active Suspension。
图9 Simulink环境下的联合仿真模型
7.AMESim模型有多输出时,注意和Simulink中接口模块排列顺序的区别:i f
your AMESim model has more than one input coming from Simulink, the input signals to AMESim have their order reversed when compared to what is sent from Simulink.
This is due to the fact that AMESim numbers the ports in counter-clockwise order while the Mux block in Simulink numbers them starting at the top. The output side of the interface block is not affected by this, since in this case the variables are numbered from the top in both softwares. This can be seen by comparing the model in AMESim and Simulink as shown in the figures below:
图10 多输入输出变量的排列顺序
8.注意在Simulink中执行联合仿真时,AMESim一定要处于仿真模式(Simulation mode),
在参数模式(parameter mode)中修改AMESim模型参数后,也要再进入仿真模式(Simulation mode) 才能在Simulink里仿真。
9.联合仿真时Matlab和AMESim一定要工作于同一目录。